Изобретение относится к механическим системам, применяемым в технике для получения заданного движения выходного звена.
Известен дельта-робот [Gavel R. Device for the movement and positioning of an element in space, US Patent No. 4976582, Dec.11, 1990], состоящий из неподвижного и выходного звеньев, соединенных между собой четырьмя кинематическими цепями. Недостатком такого устройства является невозможность воспринимать выходным звеном большие нагрузки ввиду исполнения кинематических цепей в виде параллелограммов, а также ограниченное число степеней свободы выходного звена, равное четырем (возможны линейные смещения вдоль каждой из трех осей координат и поворот вокруг вертикальной оси).
Наиболее близким к предлагаемому устройству является поворотный гексапод с круговой направляющей [Coulombe J., Bonev LA. A new rotary hexapod for micropositioning. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany. 2013, pp. 877-880, Figure. 2], включающий неподвижное звено (стойку), выполненное в виде замкнутой круговой направляющей, и выходное звено, выполненное в виде платформы, соединенные между собой шестью кинематическими цепями, каждая из которых включает каретку и штангу. Каретка образует с круговой направляющей вращательный шарнир, штанга входит в сферические шарниры с кареткой и платформой. Движение выходного звена контролируется шестью приводами, расположенными за периметром круговой направляющей и установленными на каретках, выполняющих функцию ведущих звеньев. При этом на круговой направляющей нарезаны зубья, а на валах приводов кареток установлены аналоги зубчатых колес, которые выполнены в виде цилиндров, установленных между двумя круглыми пластинами, и сопряжены с круговой направляющей.
Данный механизм принимается за прототип предлагаемого устройства. Недостаток прототипа заключается в сложности изготовления круговой направляющей и элементов кареток. Недостаток также состоит в том, что привода расположены на подвижных звеньях (каретках), добавляя им дополнительный вес и увеличивая инерционные нагрузки.
Техническая проблема, решаемая предлагаемым изобретением, заключается в упрощении конструкции прототипа путем применения в нем круговой направляющей, не требующей нарезки зубьев, путем устранения аналогов зубчатых колес на каретках, а также расположении всех приводов на неподвижном звене (стойке) для уменьшения веса ведущих звеньев и снижения инерционных нагрузок, возникающих в процессе их движения.
Данная проблема решается тем, что в предлагаемой ориентирующей платформе, включающей стойку в виде замкнутой круговой направляющей и выходное звено в виде платформы, соединенные между собой шестью кинематическими цепями, каждая из которых содержит привод, каретку, установленную на круговой направляющей, и штангу, сопряженную с кареткой и выходным звеном сферическими шарнирами, согласно изобретению в каждой кинематической цепи привод неподвижно установлен внутри круговой направляющей и жестко соединен с кривошипом, входящим во вращательный шарнир с камнем, образующим поступательный шарнир с кулисой, сопряженной с одной стороны вращательным шарниром с круговой направляющей в ее центре, а с другой стороны жестко соединенной с кареткой. Кроме этого, в каждой кинематической цепи кривошип выполнен с равномерно расположенными по его длине отверстиями.
Технический результат, получаемый при использовании предлагаемого изобретения, заключается в упрощенной конструкции круговой направляющей и кареток, а также в уменьшении веса кареток и уменьшении инерционных нагрузок, возникающих при их движении.
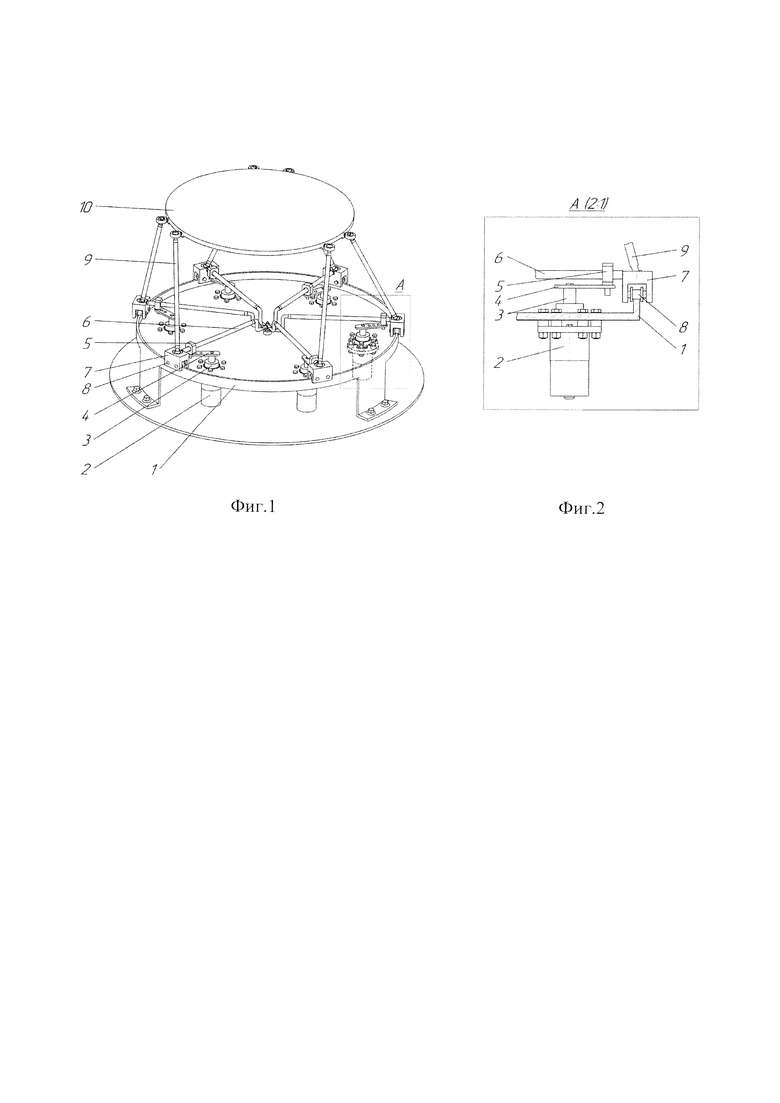
Предлагаемое изобретение поясняется чертежом, где на фиг. 1 показана ориентирующая платформа с шестью степенями свободы, на фиг .2 - соединение привода со стойкой.
Ориентирующая платформа состоит из стойки 1, выполненной в виде замкнутой круговой направляющей, приводов 2, валов приводов 3, кривошипов 4, камней 5, кулис 6, жестко соединенных с каретками 7, установленными на роликах 8, штанг 9 и выходного звена 10, выполненного в виде платформы.
Привода 2 жестко установлены на стойке 1, на валах 3 жестко установлены кривошипы 4, образующие вращательные шарниры с камнями 5, которые входят в поступательные шарниры с кулисами 6. Каретки 8 образуют вращательные шарниры с круговой направляющей и сферические шарниры со штангами 9, которые также входят в сферические шарниры с платформой 10.
На кривошипах 4 выполнены отверстия с возможностью установки вращательных шарниров 4-5 на разном расстоянии от центров вращения кривошипов 4. Таким образом, появляется возможность изменять длины участков на круговой направляющей, по которым движутся каретки 7, т.е. получать разные смещения кареток в каждой кинематической цепи механизма. Это позволит изменять размеры рабочей зоны платформы 10.
Принцип работы механизма заключается в следующем. Шесть приводов 2, жестко связанных с платформой 1, приводят в движение валы 3 и установленные на них кривошипы 4. Движение от кривошипов 4 передается камням 5, которые отклоняют кулисы 6 на заданный угол. При этом кулисы 6 направляют каретки 7 по круговой направляющей 1. Каретки 7 ориентируют штанги 9, передающие движение на платформу 10. Входное движение задается независимо любому из приводов 2. Одновременно может быть приведено в движение до шести приводов.
Предлагаемое изобретение может быть использовано в технологических процессах по обработке различных элементов деталей машин в качестве ориентирующего устройства, а также может быть использовано в качестве опорно-поворотного устройства для спутниковых антенн. Возможно также применение предлагаемого изобретения в медицине для задания пространственной ориентации различных объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКЛАДНОЙ МЕХАНИЗМ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2019 |
|
RU2720270C1 |
| УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2017 |
|
RU2674370C1 |
| ШЕСТИПОДВИЖНОЕ ПРОСТРАНСТВЕННОЕ УСТРОЙСТВО ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2023 |
|
RU2804666C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ С ДВУХ- И ЧЕТЫРЕХПОДВИЖНЫМ МОДУЛЯМИ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2804502C1 |
| ТРЕХПОДВИЖНЫЙ РЕКОНФИГУРИРУЕМЫЙ СФЕРИЧЕСКИЙ МЕХАНИЗМ С КРУГОВОЙ НАПРАВЛЯЮЩЕЙ | 2023 |
|
RU2800734C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ДЛЯ МИКРОПОЗИЦИОНИРОВАНИЯ | 2018 |
|
RU2674357C1 |
| ПРОСТРАНСТВЕННЫЙ ПЯТИПОДВИЖНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2801186C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ С ПЯТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2023 |
|
RU2800733C1 |
| ДВУХПОДВИЖНЫЙ РЕКОНФИГУРИРУЕМЫЙ СФЕРИЧЕСКИЙ МЕХАНИЗМ С КРУГОВОЙ НАПРАВЛЯЮЩЕЙ | 2023 |
|
RU2799609C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С КРУГОВЫМ РЫЧАЖНЫМ ОСНОВАНИЕМ | 2017 |
|
RU2667236C1 |
Изобретение относится к механическим системам и может быть использовано в технике для получения заданного движения выходного звена. Ориентирующая платформа содержит стойку в виде замкнутой круговой направляющей и выходное звено в виде платформы, соединенные между собой шестью кинематическими цепями, каждая из которых содержит привод, каретку, установленную на круговой направляющей, и штангу, сопряженную с кареткой и платформой сферическими шарнирами. В каждой кинематической цепи привод неподвижно установлен внутри круговой направляющей и жестко соединен с кривошипом, входящим во вращательный шарнир с камнем, образующим поступательный шарнир с кулисой, сопряженной с одной стороны вращательным шарниром с круговой направляющей в ее центре, а с другой стороны жестко соединенной с кареткой. В результате упрощается конструкция платформы и уменьшаются инерционные нагрузки при движении ее элементов. 1 з.п. ф-лы, 2 ил.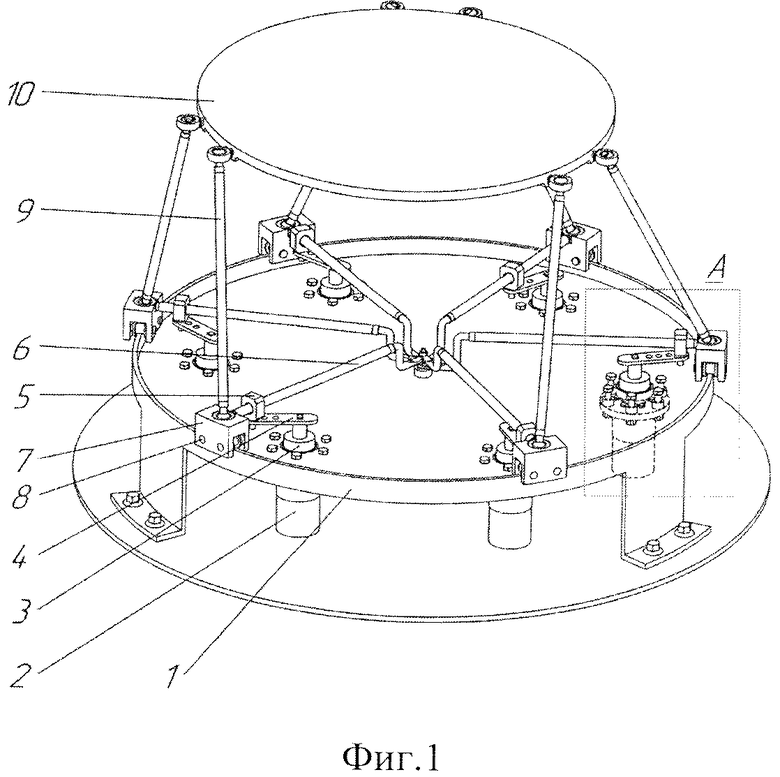
1. Ориентирующая платформа с шестью степенями свободы, содержащая стойку в виде замкнутой круговой направляющей и выходное звено в виде платформы, соединенные между собой шестью кинематическими цепями, каждая из которых содержит привод, каретку, установленную на круговой направляющей, и штангу, сопряженную с кареткой и платформой сферическими шарнирами, отличающаяся тем, что в каждой кинематической цепи привод неподвижно установлен внутри круговой направляющей и жестко соединен с кривошипом, входящим во вращательный шарнир с камнем, образующим поступательный шарнир с кулисой, сопряженной с одной стороны вращательным шарниром с круговой направляющей в ее центре, а с другой стороны жестко соединенной с кареткой.
2. Ориентирующая платформа по п. 1, отличающаяся тем, что кривошип выполнен с равномерно расположенными по его длине отверстиями.
| УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2017 |
|
RU2674370C1 |
| Выпрямительное устройство | 1929 |
|
SU20222A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ НЕМЕТАЛЛИЧЕСКИХПОКРЫТИЙ | 0 |
|
SU160612A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |

