Область техники
[0001] Настоящее изобретение относится к устройству для испытаний шин.
Уровень техники
[0002] Поскольку на эксплуатационные характеристики шины влияет состояние поверхностей дорог, требуется оценка эксплуатационных характеристики шины для поверхностей дорог в разных состояниях. Испытания для оценки эксплуатационных характеристик шин включают, например, ходовые/дорожные испытания, которые выполняются посредством установки испытываемых шин на ободьях колес специального испытательного транспортного средства и обеспечения движения испытательного транспортного средства по поверхностям реальных дорог, и испытания в закрытом помещении (стендовые испытания), которые выполняются посредством использования устройств для испытаний, установленных в помещении.
[0003] В публикации предварительной заявки на патент Японии № 2015-72215 (патентный документ 1) раскрыто иллюстративное устройство для испытаний, подлежащее использованию при стендовых испытаниях шин. Устройство для испытаний, раскрытое в патентном документе 1, включает в себя вращающийся барабан, на наружной периферийной поверхности которого образована поверхность имитирующего дорожного покрытия, и испытание выполняют посредством обеспечения вращения испытываемой шины и барабана в состоянии, в котором обеспечивается контакт испытываемой шины с поверхностью имитирующего дорожного покрытия.
Сущность изобретения
[0004] Стендовые испытания являются более точными и более эффективными, чем дорожные испытания. Однако поскольку в известных устройствах для испытаний, предназначенных для стендового испытания, обеспечивается перемещение поверхности имитирующего дорожного покрытия с высокой скоростью во время испытания, затруднено выполнение испытания при состоянии поверхности дорожного покрытия, при котором поверхность дорожного покрытия покрыта дождевой водой, снегом, гравием или тому подобным.
[0005] Настоящее изобретение было сделано с учетом вышеприведенного обстоятельства, и задача настоящего изобретения состоит в том, чтобы предложить устройство для испытаний шин, которое способно выполнять стендовые испытания при различных состояниях поверхности дорожного покрытия.
[0006] Согласно варианту осуществления настоящего изобретения предложено устройство для испытаний шин, включающее в себя поверхность дорожного покрытия, каретку, выполненную с возможностью удерживания испытательного колеса, на котором установлена испытываемая шина, с возможностью вращения и способную перемещаться вдоль поверхности дорожного покрытия в состоянии, в котором испытываемая шина находится в контакте с поверхностью дорожного покрытия, и направляющий механизм, выполненный с возможностью направления перемещения каретки в направлении движения. Направляющий механизм включает в себя рельсовую направляющую, проходящую в направлении движения каретки, и подвижный элемент, прикрепленный к каретке и выполненный с возможностью перемещения по рельсовой направляющей. Подвижный элемент включает в себя ролик, выполненный с возможностью качения по рельсовой направляющей, и подшипник, выполненный с возможностью обеспечения опоры для ролика с возможностью вращения. Подшипник представляет собой подшипник качения, включающий в себя тела качения, катящиеся по круговой дорожке качения.
[0007] В устройстве для испытаний шин, описанном выше, подвижный элемент может включать в себя множество роликов, при этом множество роликов включает первый ролик, выполненный с возможностью качения по верхней поверхности головки рельсовой направляющей, и по меньшей мере один из второго ролика, выполненного с возможностью качения по нижней поверхности головки рельсовой направляющей, и третьего ролика, выполненного с возможностью качения по боковой поверхности головки рельсовой направляющей.
[0008] В устройстве для испытаний шин, описанном выше, множество роликов могут быть сгруппированы в множество групп, при этом множество групп роликов расположены в направлении движения каретки, и каждая из множества групп роликов может включать в себя первый ролик и по меньшей мере один из второго ролика и третьего ролика.
[0009] В устройстве для испытаний шин, описанном выше, подвижный элемент может включать в себя раму, прикрепленную к каретке, и множество стержней, опирающихся на раму, и подшипник может включать в себя внутреннее кольцо, установленное с прилеганием к стержню, наружное кольцо, установленное с прилеганием к внутренней периферийной поверхности ролика, и множество тел качения, расположенных между наружной периферийной поверхностью внутреннего кольца и внутренней периферийной поверхностью наружного кольца.
[0010] Устройство для испытаний шин, описанное выше, может включать в себя множество направляющих механизмов, включающее первый направляющий механизм и второй направляющий механизм, рельсовые направляющие которых расположены параллельно друг другу, при этом по меньшей мере один из второго ролика и третьего ролика каждого из первого направляющего механизма и второго направляющего механизма расположен между рельсовыми направляющими первого направляющего механизма и второго направляющего механизма.
[0011] Устройство для испытаний шин, описанное выше, может включать в себя множество направляющих механизмов, включающее первый направляющий механизм и второй направляющий механизм, рельсовые направляющие которых расположены параллельно друг другу, при этом рельсовая направляющая первого направляющего механизма и рельсовая направляющая второго направляющего механизма расположены между по меньшей мере одним из второго ролика и третьего ролика первого направляющего механизма и по меньшей мере одним из второго ролика и третьего ролика второго направляющего механизма.
[0012] Устройство для испытаний шин, описанное выше, может включать в себя компонент с поверхностью дорожного покрытия, имеющий поверхность дорожного покрытия, при этом по меньшей мере часть компонента с поверхностью дорожного покрытия образована из сменного элемента с поверхностью дорожного покрытия.
[0013] В устройстве для испытаний шин, описанном выше, компонент с поверхностью дорожного покрытия может включать в себя основание и компонент, образующий дорожное покрытие, который предусмотрен на основании и на поверхности которого образована поверхность дорожного покрытия, и по меньшей мере часть компонента, образующего дорожное покрытие, может быть образована из по меньшей мере одного элемента с поверхностью дорожного покрытия.
[0014] В устройстве для испытаний шин, описанном выше, компонент с поверхностью дорожного покрытия может включать в себя компонент, образующий основную часть и имеющий основание, и компонент, образующий дорожное покрытие, который предусмотрен на основании и на поверхности которого образована поверхность дорожного покрытия, и по меньшей мере часть компонента, образующего основную часть, может быть образована из по меньшей мере одного элемента с поверхностью дорожного покрытия.
[0015] В устройстве для испытаний шин, описанном выше, компонент с поверхностью дорожного покрытия может включать в себя рамный компонент, образующий бассейн вместе с основанием.
[0016] В устройстве для испытаний шин, описанном выше, поверхность дорожного покрытия может представлять собой поверхность имитирующего дорожного покрытия, образованного из материала, отличающегося от дорожного покрытия реальной дороги.
[0017] Устройство для испытаний шин, описанное выше, может включать в себя систему привода, выполненную с возможностью приведения в движение испытательного колеса и каретки.
[0018] В устройстве для испытаний шин, описанном выше, система привода может включать в себя средство приведения в движение каретки, выполненное с возможностью приведения каретки в движение относительно поверхности дорожного покрытия с заданной скоростью.
[0019] В устройстве для испытаний шин, описанном выше, система привода может включать в себя средство приведения в движение испытательного колеса, выполненное с возможностью приведения в движение испытательного колеса. Средство приведения в движение испытательного колеса может быть выполнено с возможностью приведения испытательного колеса в движение со скоростью вращения, которая соответствует заданной скорости.
[0020] В устройстве для испытаний шин, описанном выше, система привода может включать в себя первое средство генерирования мощности, выполненное с возможностью генерирования мощности, подлежащей использованию для приведения в движение каретки и испытательного колеса.
[0021] В устройстве для испытаний шин, описанном выше, система привода может включать в себя средство распределения мощности, выполненное с возможностью распределения мощности, генерированной первым средством генерирования мощности, по средству приведения в движение каретки и средству приведения в движение испытательного колеса.
[0022] В устройстве для испытаний шин, описанном выше, система привода может включать в себя первый передаточный механизм с намотанным элементом, выполненный с возможностью передачи мощности, генерированной первым средством генерирования мощности.
[0023] В устройстве для испытаний шин, описанном выше, первый передаточный механизм с намотанным элементом может включать в себя ведущий шкив, соединенный с выходным валом первого средства генерирования мощности, ведомый шкив, удерживаемый кареткой и соединенный с испытательным колесом, и первый намотанный промежуточный элемент, намотанный вокруг ведущего шкива и ведомого шкива. Первый намотанный промежуточный элемент может иметь первую часть и вторую часть, натянутые в направлении движения каретки и выполненные с возможностью приведения их в движение в направлениях, противоположных друг другу. Первый намотанный промежуточный элемент может охватывать ведомый шкив в зоне данной первой части и может быть прикреплен к каретке в зоне данной второй части.
[0024] В устройстве для испытаний шин, описанном выше, система привода может включать в себя вспомогательный компонент для передачи мощности, соединенный с первым передаточным механизмом с намотанным элементом и выполненный с возможностью передачи по меньшей мере части мощности, передаваемой первым передаточным механизмом с намотанным элементом, испытательному колесу.
[0025] В устройстве для испытаний шин, описанном выше, ведомый шкив может быть присоединен к входному валу вспомогательного компонента для передачи мощности.
[0026] В устройстве для испытаний шин, описанном выше, система привода может включать в себя два первых средства генерирования мощности, первый передаточный механизм с намотанным элементом может включать в себя два ведущих шкива, соединенных соответственно с выходными валами двух первых средств генерирования мощности, и первый намотанный промежуточный элемент может образовывать петлю и может быть намотан вокруг двух ведущих шкивов и ведомого шкива.
[0027] В устройстве для испытаний шин, описанном выше, первый намотанный промежуточный элемент может представлять собой зубчатый ремень, имеющий корды, образованные из стальных проволок.
[0028] В устройстве для испытаний шин, описанном выше, первый намотанный промежуточный элемент может представлять собой зубчатый ремень, имеющий углеродные корды.
[0029] Устройство для испытаний шин, описанное выше, может включать в себя основание, к которому присоединена рельсовая направляющая.
[0030] В устройстве для испытаний шин, описанном выше, средство приведения в движение испытательного колеса может включать в себя второе средство генерирования мощности, выполненное с возможностью генерирования мощности для приведения испытательного колеса во вращательное движение.
[0031] В устройстве для испытаний шин, описанном выше, средство приведения в движение испытательного колеса может включать в себя средство соединения мощности, выполненное с возможностью соединения мощности, генерированной первым средством генерирования мощности и вторым средством генерирования мощности.
[0032] В устройстве для испытаний шин, описанном выше, первое средство генерирования мощности может включать в себя первый электродвигатель, установленный на основании, и второе средство генерирования мощности может включать в себя второй электродвигатель, установленный на каретке.
[0033] В устройстве для испытаний шин, описанном выше, средство приведения в движение испытательного колеса может включать в себя средство сообщения вращательного движения, выполненное с возможностью сообщения вращательного движения со скоростью вращения, которая соответствует скорости каретки, и средство приложения крутящего момента, выполненное с возможностью приложения заданного крутящего момента к испытательному колесу посредством изменения фазы вращательного движения, сообщаемого от средства сообщения вращательного движения.
[0034] В устройстве для испытаний шин, описанном выше, средство сообщения вращательного движения может включать в себя первый электродвигатель, установленный на основании, и средство приложения крутящего момента может включать в себя второй электродвигатель, установленный на каретке.
[0035] В устройстве для испытаний шин, описанном выше, средство приложения крутящего момента может включать в себя средство соединения мощности, выполненное с возможностью соединения мощности, генерированной первым электродвигателем, и мощности, генерированной вторым электродвигателем.
[0036] В устройстве для испытаний шин, описанном выше, средство приложения крутящего момента может включать в себя вращающуюся раму, к которой присоединен второй электродвигатель и которая выполнена возможностью приведения ее во вращательное движение за счет мощности, генерированной первым электродвигателем, и вал, приводимый в движение вторым электродвигателем, и вал и вращающаяся рама могут быть расположены концентрично.
[0037] В устройстве для испытаний шин, описанном выше, средство приложения крутящего момента может включать в себя два опорных компонента, выполненных с возможностью обеспечения опоры для вращающейся рамы с возможностью ее вращения. Вращающаяся рама может быть цилиндрической и может иметь часть для размещения электродвигателя, выполненную с возможностью размещения второго электродвигателя, и две части в виде валов, предусмотренные в аксиальном направлении с обеих сторон части для размещения электродвигателя, расположенной между ними, и имеющие диаметры, которые меньше диаметра части для размещения электродвигателя. Вращающаяся рама в зоне двух частей в виде валов может опираться с возможностью вращения на два опорных компонента. Одна из частей в виде валов может быть цилиндрической, и вал может проходить через полую часть цилиндрической части, имеющей вид вала. На внутренней периферии части в виде вала может быть предусмотрен подшипник, выполненный с возможностью обеспечения опоры для вала с возможностью вращения.
[0038] В устройстве для испытаний шин, описанном выше, вспомогательный компонент для передачи мощности может включать в себя второй вал, выполненный с возможностью приведения его в движение с помощью средства приложения крутящего момента, подшипник, выполненный с возможностью обеспечения опоры для второго вала с возможностью вращения, и шарнир скользящего типа, предназначенный для передачи вращения с постоянной угловой скоростью и выполненный с возможностью обеспечения соединения второго вала со шпинделем.
[0039] В устройстве для испытаний шин, описанном выше, средство приведения в движение испытательного колеса может включать в себя основной компонент для передачи мощности, выполненный с возможностью передачи мощности, переданной от средства сообщения вращательного движения, и вспомогательный компонент для передачи мощности, установленный на каретке и соединенный с основным компонентом, предназначенным для передачи мощности, для передачи мощности, переданной основным компонентом для передачи мощности, испытательному колесу. Основной компонент для передачи мощности может включать в себя первый передаточный механизм с намотанным элементом. Первый передаточный механизм с намотанным элементом может включать в себя два неподвижных шкива, расположенных на концах зоны, в которой может перемещаться каретка, подвижный шкив, удерживаемый кареткой, и первый намотанный промежуточный элемент, намотанный вокруг данных двух неподвижных шкивов и подвижного шкива. По меньшей мере один из неподвижных шкивов может представлять собой ведущий шкив, соединенный с выходным валом средства сообщения вращательного движения. Подвижный шкив может представлять собой ведомый шкив и может быть соединен с входным валом вспомогательного компонента для передачи мощности.
[0040] В устройстве для испытаний шин, описанном выше, вспомогательный компонент для передачи мощности может включать в себя второй передаточный механизм с намотанным элементом. Второй передаточный механизм с намотанным элементом может включать в себя ведущий шкив, соединенный с подвижным шкивом первого передаточного механизма с намотанным элементом, ведомый шкив, соединенный с вращающейся рамой средства приложения крутящего момента, и второй намотанный промежуточный элемент, намотанный вокруг ведущего шкива и ведомого шкива второго передаточного механизма с намотанным элементом.
[0041] В устройстве для испытаний шин, описанном выше, вспомогательный компонент для передачи мощности может включать в себя шпиндель, опертый с возможностью вращения. Концевая часть шпинделя может быть выполнена с такой конфигурацией, что испытательное колесо может быть коаксиально присоединено и отсоединено, и шпиндель может быть предусмотрен с датчиком силы, выполненным с возможностью измерения силы, действующей на испытательное колесо.
[0042] В устройстве для испытаний шин, описанном выше, каретка может включать в себя основную раму, поворотную раму, выполненную с возможностью поворота относительно основной рамы вокруг вертикальной линии, перпендикулярной к поверхности дорожного покрытия, и скользящую раму, выполненную с возможностью скольжения относительно основной рамы в вертикальном направлении, перпендикулярном к поверхности дорожного покрытия. Шпиндель может опираться на основную раму посредством поворотной рамы и скользящей рамы.
[0043] В устройстве для испытаний шин, описанном выше, каретка может включать в себя криволинейную направляющую, выполненную с возможностью направления поворота поворотной рамы вокруг вертикальной линии, и прямолинейную направляющую, выполненную с возможностью направления перемещения скользящей рамы в вертикальном направлении.
[0044] В устройстве для испытаний шин, описанном выше, скользящая рама может быть выполнена с возможностью обеспечения опоры для шпинделя с возможностью его вращения вокруг горизонтальной оси, перпендикулярной как к осевой линии шпинделя, так и к вертикальной линии.
[0045] В устройстве для испытаний шин, описанном выше, каретка может включать в себя компонент для регулирования нагрузки, выполненный с возможностью регулирования нагрузки, действующей на испытательное колесо, посредством перемещения скользящей рамы в вертикальном направлении.
[0046] В устройстве для испытаний шин, описанном выше, каретка может включать в себя компонент для регулирования угла увода, выполненный с возможностью регулирования угла увода испытательного колеса относительно поверхности дорожного покрытия посредством поворота поворотной рамы вокруг вертикальной линии.
[0047] Устройство для испытаний шин, описанное выше, может включать в себя компонент для регулирования угла развала, выполненный с возможностью регулирования угла развала испытательного колеса относительно поверхности дорожного покрытия посредством поворота шпинделя вокруг горизонтальной оси.
[0048] В устройстве для испытаний шин, описанном выше, компонент для измерения нагрузки, выполненный с возможностью определения распределения нагрузки, которую воспринимает протектор шины испытательного колеса, может быть предусмотрен на верхней поверхности компонента с поверхностью дорожного покрытия.
[0049] В устройстве для испытаний шин, описанном выше, компонент для измерения нагрузки может включать в себя множество модулей измерения нагрузки, расположенных в узлах решетки, предусмотренных в направлении движения каретки и аксиальном направлении испытательного колеса.
[0050] В устройстве для испытаний шин, описанном выше, каждый из модулей измерения нагрузки может включать в себя датчик трех составляющих силы.
[0051] Устройство для испытаний шин может дополнительно включать в себя средство измерения, выполненное с возможностью определения распределения нагрузки на основе результата измерения, полученного компонентом для измерения нагрузки. Средство измерения может быть выполнено с возможностью вычисления радиальной силы, тангенциальной силы и поперечной силы, которые воспринимает протектор шины, на основе результатов измерения, полученных датчиком трех составляющих силы.
[0052] Устройство для испытаний шин может дополнительно включать в себя средство хранения, выполненное с возможностью сохранения выявленного распределения нагрузки.
[0053] Устройство для испытаний шин может дополнительно включать в себя средство, выполненное с возможностью определения положения испытательного колеса при перемещении в направлении движения каретки. Средство хранения может быть выполнено с возможностью сохранения определенного распределения нагрузки и положения испытательного колеса при перемещении в момент определения распределения нагрузки при одновременной увязке определенного распределения нагрузки с положением испытательного колеса при перемещении в момент определения распределения нагрузки.
[0054] Устройство для испытаний шин может дополнительно включать в себя средство, выполненное с возможностью определения углового положения испытательного колеса. Средство хранения может быть выполнено с возможностью сохранения определенного распределения нагрузки и углового положения испытательного колеса в момент определения распределения нагрузки при одновременной увязке определенного распределения нагрузки с угловым положением испытательного колеса в момент определения распределения нагрузки.
[0055] В устройстве для испытаний шин, описанном выше, средство хранения может быть выполнено с возможностью сохранения распределения нагрузки и силы, действующей на испытательное колесо, которые определены в один и тот же момент времени, при одновременной увязке распределения нагрузки с силой, действующей на испытательное колесо, при этом распределение нагрузки и сила, действующая на испытательное колесо, определены в один и тот же момент времени.
[0056] Устройство для испытаний шин может дополнительно включать в себя средство, выполненное с возможностью расчета относительных положений модулей измерения нагрузки относительно положения испытательного колеса при перемещении. Могут быть вычислены определяемые значения распределения нагрузки в зависимости от данных относительных положений.
[0057] В устройстве для испытаний шин, описанном выше, определение распределения нагрузки может выполняться множество раз при обеспечении перемещения каретки, и определяемые значения распределения нагрузки вычисляются посредством усреднения множества результатов определения распределения нагрузки для каждого относительного положения.
[0058] В устройстве для испытаний шин, описанном выше, определяемые значения распределения нагрузки могут быть рассчитаны посредством регрессионного анализа.
[0059] В устройстве для испытаний шин, описанном выше, одна серия измерений с помощью компонента для измерения нагрузки может быть выполнена посредством перемещения каретки в одном направлении, и определяемые значения распределения нагрузки могут быть вычислены на основе результатов измерений, полученных при выполнении множества серий измерений компонентом для измерения нагрузки.
[0060] Устройство для испытаний шин, описанное выше, может включать в себя средство, выполненное с возможностью изменения положения компонента, предназначенного для измерения нагрузки, в аксиальном направлении испытательного колеса.
[0061] Устройство для испытаний шин, описанное выше, может включать в себя средство, выполненное с возможностью изменения положения компонента, предназначенного для измерения нагрузки, в направлении движения.
[0062] В соответствии с вариантом осуществления настоящего изобретения становится возможным выполнение стендовых испытаний шин при различных состояниях поверхности дорожного покрытия посредством выбора конфигурации, в которой обеспечивается перемещение каретки, удерживающей испытываемую шину, вдоль поверхности дорожного покрытия без обеспечения перемещения поверхности дорожного покрытия во время испытания.
Краткое описание чертежей
[0063] Фиг.1 - вид спереди устройства для испытаний шин согласно варианту осуществления настоящего изобретения.
Фиг.2 - вид сбоку устройства для испытаний шин согласно варианту осуществления настоящего изобретения.
Фиг.3 - вид в плане устройства для испытаний шин согласно варианту осуществления настоящего изобретения.
Фиг.4 - схематическое изображение, показывающее конструктивные элементы каретки и конструктивные элементы вокруг каретки.
Фиг.5 - схематическое изображение, показывающее конструктивные элементы каретки и конструктивные элементы вокруг каретки.
Фиг.6 - схематическое изображение, показывающее конструктивные элементы каретки и конструктивные элементы вокруг каретки.
Фиг.7 - схематическое изображение, показывающее конструкции/расположение трех направляющих механизмов.
Фиг.8 - вид сбоку, на котором увеличена часть рядом с подвижным элементом направляющего механизма.
Фиг.9 - вид в разрезе направляющего механизма (вид по стрелкам А-А с фиг.7).
Фиг.10 - вид в разрезе другого направляющего механизма (вид по стрелкам В-В с фиг.7).
Фиг.11 - вид в плане, показывающий схематический чертеж конструкции ведомого компонента.
Фиг.12 - вид сбоку в разрезе устройства для приложения крутящего момента.
Фиг.13 - схематическое изображение, показывающее конструктивные элементы шпинделя и конструктивные элементы вокруг шпинделя.
Фиг.14 - поперечное сечение компонента с поверхностью дорожного покрытия.
Фиг.15 - поперечное сечение варианта компонента с поверхностью дорожного покрытия.
Фиг.16 - вид в плане компонента с поверхностью дорожного покрытия в зоне вокруг компонента для измерения нагрузки.
Фиг.17 - вид сбоку компонента с поверхностью дорожного покрытия в зоне вокруг компонента для измерения нагрузки.
Фиг.18 - вид спереди компонента для измерения нагрузки.
Фиг.19 - вид сбоку компонента для измерения нагрузки.
Фиг.20 - вид в плане компонента для измерения нагрузки.
Фиг.21 - вид в плане, показывающий состояние, в котором подвижная часть компонента для измерения нагрузки удалена.
Фиг.22 - увеличенный вид зоны Е, показанной на фиг.18.
Фиг.23 - схема последовательности операций, показывающая процедуру получения распределения нагрузки, действующей на протектор шины.
Фиг.24 - схема последовательности операций, показывающая процедуру расчета профиля нагрузки.
Фиг.25 - вид в плане, показывающий взаимное расположение модулей измерения нагрузки и оси вращения испытательного колеса.
Фиг.26 - примеры отображения профилей нагрузок.
Фиг.27 - блок-схема, показывающая общую конфигурацию системы управления.
Варианты осуществления изобретения
[0064] В дальнейшем варианты осуществления настоящего изобретения будут описаны со ссылкой на чертежи. В нижеприведенном описании одни и те же или соответствующие компоненты обозначены одинаковыми или соответствующими ссылочными позициями, и дублирующие описания опущены в данном документе. На каждом чертеже в случае, когда показано множество элементов, имеющих одну и ту же ссылочную позицию, ссылочная позиция необязательно указана для всего множества элементов, и присвоение ссылочной позиции некоторым из множества элементов соответствующим образом исключено.
[0065] Фиг.1, 2 и 3 представляют собой соответственно вид спереди, вид слева и вид в плане устройства 1 для испытаний шин согласно варианту осуществления настоящего изобретения. Фиг.4, 5 и 6 представляют собой соответственно вид спереди, вид слева и вид в плане, показывающие конструктивные каретки 20 и конструктивные элементы вокруг каретки 20, которые будут описаны позднее. На фиг.4-6 для удобства разъяснения некоторые компоненты исключены или показаны в сечениях.
[0066] На фиг.2 и 5 направление справа налево задано как направление оси Х, направление от задней стороны к передней стороне, перпендикулярное листу бумаги, задано как направление оси Y, и направление снизу-вверх задано как направление оси Z. Направление оси Х и направление оси Y представляют собой горизонтальные направления, ортогональные друг к другу, и направление оси Z представляет собой вертикальное направление. Кроме того, направление вперед-назад, направление вверх-вниз и направление влево-вправо заданы как направления при рассмотрении направления движения каретки 20 (положительного направления оси Х). То есть положительное направление оси Х задано как направление вперед, отрицательное направление оси Х задано как направление назад, положительное направление оси Y задано как направление влево, отрицательное направление оси Y задано как направление вправо, положительное направление оси Z задано как направление вверх, и отрицательное направление оси Z задано как направление вниз.
[0067] Устройство 1 для испытаний шин включает в себя направляющий компонент 10 и компонент 60 с поверхностью дорожного покрытия, удлиненные в направлении оси Х, и каретку 20, которая выполнена с возможностью перемещения по направляющему компоненту 10 в направлении оси Х. Как показано на фиг.3, в левой части направляющего компонента 10 предусмотрено удлиненное пространство Sp1, простирающееся по существу на всей длине направляющего компонента 10 в направлении оси Х. Компонент 60 с поверхностью дорожного покрытия размещен в данном пространстве Sp1. На верхней поверхности компонента 60 с поверхностью дорожного покрытия образована поверхность 63а дорожного покрытия, с которой контактирует испытываемая шина Т, установленная на каретке 20. В данном варианте осуществления для обеспечения возможности замены компонента 60 с поверхностью дорожного покрытия в соответствии с условиями испытаний направляющий компонент 10 и компонент 60 с поверхностью дорожного покрытия отделяют друг от друга. Следует отметить, что основная рама 11 (в дальнейшем упоминаемая кратко как «основание 11») направляющего компонента 10 и рама 61 компонента 60 с поверхностью дорожного покрытия могут быть объединены в одно целое.
[0068] Как показано на фиг.2, к каретке 20 присоединено испытательное колесо W (обод Wr колеса, на котором установлена испытываемая шина Т). При выполнении испытания каретка 20 перемещается в состоянии, в котором испытательное колесо W находится в контакте с поверхностью 63а дорожного покрытия, и испытываемая шина Т катится по поверхности 63а дорожного покрытия.
[0069] Как показано на фиг.3 и 4, направляющий компонент 10 включает в себя множество направляющих механизмов (в данном варианте осуществления три направляющих механизма) 13А, 13В и 13С, выполненных с возможностью направления перемещения каретки 20 в направлении оси Х, и один или более приводных компонентов 14 (фиг.3), выполненных с возможностью генерирования механической мощности для приведения в движение каретки 20. Приводной компонент 14 служит в качестве первого средства генерирования мощности, которое генерирует мощность, подлежащую использованию для приведения в движение каретки 20 и испытательного колеса W. В данном варианте осуществления две пары приводных компонентов 14 (два приводных компонента 14LA и 14LB, расположенных слева, и два приводных компонента 14RA и 14RB, расположенных справа) смонтированы на основании 11 направляющего компонента 10 рядом с четырьмя углами основания 11. Приводные компоненты 14LA и 14RA расположены в задней концевой части направляющего компонента 10, и приводные компоненты 14LB и 14RB расположены в передней концевой части направляющего компонента 10.
[0070] Как показано на фиг.6, каждый приводной компонент 14 включает в себя серводвигатель 141 и возможный, но необязательный редуктор 142, выполненный с возможностью уменьшения частоты вращения выходного элемента серводвигателя 141. Как будет описано позднее, приводные компоненты 14RA и 14RB, расположенные справа, служат как в качестве средства приведения в движение каретки, предназначенного для приведения в движение каретки 20, так и в качестве средства сообщения вращательного движения, предназначенного для сообщения испытательному колесу W вращательного движения с частотой вращения, которая соответствует скорости перемещения каретки 20. Приводные компоненты 14LA и 14LB, расположенные слева, служат в качестве средств приведения в движение каретки.
[0071] В данном варианте осуществления в качестве серводвигателя 141 используется высокомощный серводвигатель переменного тока с ротором со сверхнизкой инерцией, с моментом инерции вращающегося компонента, который равен или меньше 0,01 кг⋅м2 (предпочтительно равен или меньше 0,008 кг⋅м2), и с номинальной мощностью, составляющей 3-60 кВт (для практического использования более подходящей является мощность 7-37 кВт).
[0072] Устройство 1 для испытаний шин включает в себя два ременных передаточных механизма 50 (50L, 50R) с каждой из левой стороны и правой стороны. Ременные передаточные механизмы 50 передают мощность, генерированную приводными компонентами 14, каретке 20 и обеспечивают приведение каретки 20 в движение в направлении оси Х. Каждый ременный передаточный механизм 50 включает в себя зубчатый ремень 51 и два ведущих шкива 52 (52А, 52В). Ведущие шкивы 52 представляют собой зубчатые шкивы, которые входят в зацепление с зубчатым ремнем 51.
[0073] Зубчатый ремень 51 имеет проволочные корды, образованные из стальных проволок. Следует отметить, что в качестве зубчатого ремня 51 может быть использован зубчатый ремень, имеющий корды, изготовленные из так называемого суперволокна, такого как углеродное волокно, арамидное волокно или волокно из полиэтилена с ультравысокой молекулярной массой. При использовании легких и высокопрочных кордов, таких как углеродные корды, становится возможным приведение каретки 20 в движение с большим ускорением (или приложение большой движущей силы/силы торможения к испытательному колесу W) посредством использования электродвигателя с относительно низкой выходной мощностью, и, следовательно, становится возможным уменьшение размеров устройства 1 для испытаний шин. Кроме того, при использовании легкого зубчатого ремня 51, имеющего корд, образованный из так называемого суперволокна, можно улучшить эксплуатационные характеристики устройства 1 для испытаний шин, когда используется электродвигатель, имеющий ту же выходную мощность.
[0074] Ременный передаточный механизм 50R, расположенный справа, служит как в качестве средства приведения в движение каретки, предназначенного для приведения каретки 20 в движение, так и в качестве основного компонента для передачи мощности, предназначенного для передачи мощности, подаваемой от средств сообщения вращательного движения (приводных компонентов 14RA, 14RB), вспомогательному компоненту для передачи мощности, который будет описан позднее. Ременный передаточный механизм 50L, расположенный слева, служит в качестве средства приведения в движение каретки.
[0075] Что касается компонентов, которые предусмотрены в виде пары компонентов, расположенных с левой стороны и с правой стороны, то в нижеприведенном описании, как правило, будет описан компонент, расположенный с левой стороны, и компонент, расположенный с правой стороны, будет указан вместе в скобках для исключения дублирующего описания.
[0076] Зубчатый ремень 51 ременного передаточного механизма 50L [50R], расположенный слева [справа], намотан вокруг двух ведущих шкивов 52 (52A, 52B) и трех ведомых шкивов 225 (225A, 225B, 225C) ведомого компонента 22L [22R], расположенного слева [справа], который будет описан позднее. Два ведущих шкива 52А, 52В соответственно соединены с выходными валами двух приводных компонентов 14LA, 14LB [14RA, 14RB], расположенных слева [справа].
[0077] Как показано на фиг.5, оба конца каждого зубчатого ремня 51 прикреплены к основной раме 21 каретки 20 посредством соответствующих зажимов 54 (54А, 54В) для ремней, в результате чего каждый зубчатый ремень 51 образует петлю посредством каретки 20. Два ведущих шкива 52А, 52В (фиг.2) ременного передаточного механизма 50 представляют собой неподвижные шкивы, которые расположены на обоих концах зоны, через которую может перемещаться каретка 20, и которые удерживаются на основании 11 (то есть шкивы, соответствующие центры тяжести которых зафиксированы относительно основания 11). Ведомые шкивы 225 (фиг.5) представляют собой подвижные шкивы, которые удерживаются на каретке 20 и могут перемещаться в направлении оси Х вместе с кареткой 20.
[0078] В данном варианте осуществления два приводных компонента 14LA, 14LB [14RA, 14RB] приводятся в действие синфазно. Эффективные диаметры (то есть диаметры делительных окружностей) или числа зубьев ведущих шкивов 52 и ведомых шкивов 225 одинаковы. Приводные компоненты 14LA, 14LB, расположенные слева, и приводные компоненты 14RA, 14RB, расположенные справа, смонтированы с обратным расположением их левой стороны и правой стороны и приводятся в действие с противоположными фазами. При приведении в движение зубчатого ремня 51L [51R] посредством приводных компонентов 14LA, 14LB [14RA, 14RB] зубчатый ремень 51L [51R] тянет каретку 20, и она приводится в движение в направлении оси Х.
[0079] Далее будет описан направляющий механизм 13 (13А, 13В, 13С).
Фиг.7 представляет собой схематическое изображение, показывающее конструкции/расположение трех направляющих механизмов 13А, 13В и 13С.
Фиг.8 представляет собой вид сбоку, на котором увеличена часть рядом с подвижным элементом 132А направляющего механизма 13А.
Фиг.9 представляет собой вид в разрезе направляющего механизма 13А (вид по стрелкам А-А на фиг.7).
[0080] Поскольку направляющий механизм 13С выполнен двустороннесимметричным по отношению к направляющему механизму 13А (то есть симметричным относительно плоскости, которая параллельна оси Z и оси Х), направляющий механизм 13А будет описан подробно как характеризующий оба механизма, и дублирующее описание направляющего механизма 13С будет опущено.
[0081] Каждый из направляющих механизмов 13А, 13В и 13С включает в себя рельсовую направляющую 131, проходящую в направлении оси Х и образующую направляющий элемент, и одну или более кареток (в данном варианте осуществления - одну каретку) (упоминаемых в дальнейшем как «подвижные элементы») 132А, 132В или 132С, которые могут перемещаться по рельсовой направляющей 131.
[0082] Рельсовая направляющая 131 уложена на верхней поверхности основания 11 направляющего компонента 10. Рельсовые направляющие 131 двух направляющих механизмов 13А и 13В расположены вдоль обоих концов пространства Sp1 (фиг.3), определяемых в направлении влево-вправо, и рельсовая направляющая 131 оставшегося направляющего механизма 13С расположена вдоль правого конца основания 11, и три рельсовые направляющие 131 присоединены к основанию 11. Каждый из подвижных элементов 132А, 132В и 132С присоединен к нижней поверхности основной рамы 21 каретки 20.
[0083] Как показано на фиг.8 и 9, подвижный элемент 132А направляющего механизма 13А включает в себя раму 133, длинную в направлении оси Х и присоединенную к нижней поверхности основной рамы 21 каретки 20, и множество групп (в данном варианте осуществления 20 групп) роликовых узлов 135a, 135b, и 135c. В направляющем механизме 13А по данному варианту осуществления три роликовых узла 135a, 135b и 135c образуют одну единичную группу.
[0084] Множество групп роликовых узлов 135a, 135b и 135c расположены с заданными интервалами в продольном направлении рельсовой направляющей 131 и удерживаются посредством рамы 133. Роликовые узлы 135b и 135c имеют такую же конфигурацию, как роликовый узел 135а (однако роликовый узел 135с имеет размеры, отличающиеся от размеров роликового узла 135а). Следовательно, будет описан роликовый узел 135а как представитель роликовых узлов, и дублирующее описание роликовых узлов 135b и 135c будет опущено.
[0085] Как показано на фиг.9, множество стержней 134a, 134b и 134c, выполненных с возможностью обеспечения опоры для роликовых узлов 135a, 135b и 135c, присоединены к раме 133.
[0086] Роликовый узел 135а включает в себя ролик 136а, выполненный с возможностью качения по рельсовой направляющей 131, и два подшипника 137а, выполненных с возможностью обеспечения опоры для ролика 136а с возможностью его вращения. Подшипники 137а представляют собой подшипники качения, имеющие тела качения, такие как шарики и ролики, и в данном варианте осуществления используются шариковые подшипники. Наружная периферийная поверхность 136ар ролика 136 также является криволинейной в направлении оси вращения (то есть в продольном сечении, показанном на фиг.9 и включающем в себя ось вращения). Наружная периферийная поверхность 136ар ролика 136а образована, например, в виде сферической поверхности с центром в центральной точке 136ag ролика 136a.
[0087] Подшипники 137а роликового узла 135а представляют собой, например, однорядные радиальные подшипники. Подшипник 137а включает в себя внутреннее кольцо 137а1, установленное с прилеганием к стержню 134а, наружное кольцо 137а3, установленное с прилеганием к внутренней периферийной поверхности ролика 136а, и шарики 137а2 в качестве множества тел качения, расположенных между внутренним кольцом 137a1 и наружным кольцом 137a3. Шарики 137а2 катятся по круговой дорожке качения, образованной двумя кольцевыми канавками, образованными соответственно на наружной периферийной поверхности внутреннего кольца 137a1 и внутренней периферийной поверхности наружного кольца 137a3.
[0088] Рельсовая направляющая 131 представляет рельсовую направляющую с плоской нижней поверхностью, имеющую головку 131h, нижнюю часть 131f, более широкую, чем головка 131h, и узкую часть 131w, которая соединяет головку 131h и нижнюю часть 131f. Рельсовая направляющая 131 по данному варианту осуществления представляет собой термообработанный рельс (например, термообработанный рельс 50N-HH340), который соответствует, например, Японскому промышленному стандарту JIS E 1120:2007 и для которого была применена дополнительная обработка. Термообработанный рельс представляет собой железнодорожный рельс, головка которого подвергнута термообработке для повышения износостойкости.
[0089] Роликовый узел 135а расположен так, что наружная периферийная поверхность 136ар входит в контакт с верхней поверхностью 131а головки рельсовой направляющей 131 и катится в продольном направлении рельсовой направляющей 131 (то есть в направлении оси Х). Роликовый узел 135b расположен так, что наружная периферийная поверхность 136bp входит в контакт с одной из нижних поверхностей 131b головки рельсовой направляющей 131 и катится в продольном направлении рельсовой направляющей 131. Роликовый узел 135с расположен так, что наружная периферийная поверхность 136ср входит в контакт с одной из боковых поверхностей 131с головки рельсовой направляющей 131с и катится в продольном направлении рельсовой направляющей 131.
[0090] Рельсовая направляющая 131 подвергнута дополнительной обработке (например, шлифованию, полированию или тому подобному) для повышения точности поверхности по меньшей мере на участках верхней поверхности 131а головки, левой и правой нижних поверхностей 131b головки и левой и правой боковых поверхностей 131с головки, которые входят в контакт с роликовым узлом 135a, 135b или 135c.
[0091] Как описано выше, направляющий механизм 13А и направляющий механизм 13С, присоединенные соответственно к левой и правой концевым частям каретки 20, выполнены двустороннесимметричными. То есть направляющий механизм 13С конфигурирован посредством размещения направляющего механизма, идентичного направляющему механизму 13А, так, чтобы расположение правой и левой сторон было изменено на противоположное (то есть посредством поворота на 180 градусов вокруг вертикальной оси).
[0092] Фиг.10 представляет собой поперечное сечение направляющего механизма 13В (вид по стрелкам В-В на фиг.7). Подвижный элемент 132В направляющего механизма 13В представляет собой подвижный элемент, образованный посредством исключения роликового узла 135с и стержня 134с из подвижного элемента 132А направляющего механизма 13А, описанного выше, и размещения подвижного элемента с противоположным расположением правой и левой сторон.
[0093] Роликовый узел 135с и стержень 134с могут быть исключены из по меньшей мере одного из подвижного элемента 132А и подвижного элемента 132С. Однако для размещения каретки 20 в заданном положении в направлении влево-вправо по меньшей мере один из роликового узла 135b и роликового узла 135с предусмотрен для по меньшей мере двух из подвижных элементов 132А, 132В и 132С (подвижных элементов, которые расположены с ориентацией напротив друг друга в направлении влево-вправо). Подвижный элемент 132В может быть предусмотрен с роликовым узлом 135с и стержнем 134с.
[0094] В представленном варианте осуществления подвижный элемент 132В (фиг.10) и подвижный элемент 132А (фиг.9) расположены так, чтобы они имели ориентации, противоположные друг другу в направлении влево-вправо, но подвижный элемент 132В может быть расположен с той же ориентацией, что и подвижный элемент 132А, в направлении влево-вправо. Аналогичным образом подвижный элемент 132С и подвижный элемент 132А могут быть расположены с одинаковой ориентацией в направлении влево-вправо. Однако любые два из подвижного элемента 132А, подвижного элемента 132В и подвижного элемента 132С расположены так, чтобы они были ориентированы противоположно друг другу в направлении влево-вправо (то есть роликовые узлы 135b расположены с противоположных сторон в направлении влево-вправо по отношению к рельсовой направляющей 131).
[0095] Рельсовая направляющая 131 направляющего механизма 13 может быть выполнена длинной посредством соединения множества коротких рельсов. В этом случае, как показано на фиг.7, стык 131j рельсовой направляющей 131 может быть образован не перпендикулярно к продольному направлению (направлению оси Х) рельсовой направляющей 131, а наклонно на виде в плане (то есть с наклоном под углом θ относительно плоскости ZX). При образовании наклонного стыка 131j даже в случае, если рельсовая направляющая 131 будет расширяться или сужаться вследствие изменения температуры, будет предотвращено изгибание рельсовой направляющей 131, поскольку напряжение рельсовой направляющей 131 снимается благодаря скольжению в стыке 131j.
[0096] Когда образован наклонный стык 131j, роликовые узлы 135b и 135c (фиг.9) расположены со стороны, с которой правая боковая поверхность 131с головки образует тупой угол относительно стыка 131j спереди от стыка 131j (то есть с левой стороны в направляющем механизме 13А и с правой стороны в направляющих механизмах 13А и 13С). Даже в случае, если возникает отклонение от правильного расположения в зоне стыка 131j рельсовой направляющей 131, при размещении роликовых узлов 135b и 135c таким образом предотвращаются столкновение роликовых узлов 135b и 135c с остроугольной концевой частью в зоне стыка 131j и возникновение сильного удара или повреждения.
[0097] В данном варианте осуществления в стыке 131j рельсовой направляющей 131 просто обеспечено размещение концевых поверхностей двух рельсов, подлежащих соединению, напротив друг друга, и данные поверхности не соединены друг с другом. Однако рельсы могут быть соединены друг с другом в зоне стыка 131j посредством сварки, пайки твердым припоем или тому подобного. Кроме того, в зоне стыка 131j концевые поверхности двух рельсов, подлежащих соединению, могут быть введены в контакт друг с другом, или может быть обеспечено размещение их напротив друг друга без контакта посредством создания заданного зазора между данными концевыми поверхностями.
[0098] Линейные опоры (так называемые линейные опоры качения), такие как шариковые линейные опоры качения, могут быть использованы вместо направляющих механизмов 13A, 13B и 13C по данному варианту осуществления. Шариковая линейная опора качения имеет овальную дорожку качения, в которой соседние концы двух параллельных прямолинейных дорожек качения соединены друг с другом посредством полукруглой дорожки качения. Когда линейная опора качения, имеющая такие прямолинейные дорожки качения, эксплуатируется при высокой скорости (например, при скорости 10 км/ч или более), при перемещении тел качения из прямолинейных дорожек качения в криволинейные дорожки качения центробежные силы будут внезапно действовать на тела качения (то есть ударные нагрузки будут действовать на тела качения и поверхности качения на криволинейных дорожках качения), и, таким образом, остаточные деформации возникают в телах качения и на поверхностях качения, и эксплуатационные характеристики линейной опоры качения ухудшаются. Следовательно, существует проблема, заключающаяся в том, что срок службы линейных опор качения уменьшается или линейные опоры качения повреждаются при обеспечении перемещения каретки 20 со скоростью, составляющей 10 км/ч или более.
[0099] Поскольку в подшипниках 137а-137с, используемых в направляющих механизмах 13A, 13B и 13C по данному варианту осуществления, тела качения всегда перемещаются по круговой дорожке качения, имеющей постоянный радиус кривизны, не возникают внезапные изменения центробежных сил, действующих на тела качения (то есть ударные нагрузки). Следовательно, например, даже когда ролики 136а-136с приводятся во вращение с высокой окружной скоростью, превышающей 60 км/ч, отсутствуют уменьшение срока службы и повреждения подшипников 137а-137с. Таким образом, при выполнении направляющих механизмов 13А-13С с конфигурацией, в которой используются подшипники качения, дорожки качения которых, предназначенные для тел качения, являются круговыми с постоянной кривизной, становится возможным перемещение каретки 20 с высокой скоростью (например, перемещение со скоростью, равной или превышающей 10 км/ч). В устройстве 1 для испытаний шин по данному варианту осуществления обеспечивается возможность перемещения каретки 20 со скоростью, превышающей 85 км/ч, при выборе вышеописанных направляющих механизмов 13A, 13B и 13C.
[0100] Как показано на фиг.6, каретка 20 включает в себя основную раму 21, два ведомых компонента, а именно левый и правый ведомые компоненты 22L и 22R, соединенные с соответствующими ременными передаточными механизмами 50L и 50R, шпиндельный компонент 28 (фиг.4), выполненный с возможностью удерживания испытательного колеса W, на котором установлена испытываемая шина Т, с возможностью вращения, компонент 40 для выставления, выполненный с возможностью регулирования положения испытательного колеса W относительно поверхности 63а дорожного покрытия и нагрузки на поверхность 63а дорожного покрытия, и механизм 20D приведения в движение шпинделя, выполненный с возможностью приведения во вращательное движение шпинделя 280 (фиг.13) шпиндельного компонента 28. Шпиндель 280 представляет собой ось, на которой должно быть установлено испытательное колесо W.
[0101] Фиг.11 представляет собой вид в плане, показывающий схематический чертеж конструкции ведомого компонента 22R, расположенного справа. Ведомый компонент 22R включает в себя раму 221, четыре группы подшипников 222, четыре вала 223 (223A, 223B, 223C, 223D), два зубчатых колеса 224 и три ведомых шкива 225 (225A, 225B, 225C). В раме 221 образованы четыре сквозных отверстия, проходящих в направлении оси Y. Каждый из валов 223A-D опирается с возможностью вращения на группу подшипников 222, установленных в соответствующих сквозных отверстиях. В данном варианте осуществления каждый из валов 223A-D опирается на два подшипника 222, но каждый из валов 223A-D может опираться на один подшипник 222 или три или более подшипников 222.
[0102] Одно из пары зубчатых колес 224, которые входят в зацепление друг с другом, присоединено к валу 223В, расположенному в центре вверху в направлении оси Х, и другое из пары зубчатых колес 224 присоединено к валу 223D, расположенному в центре внизу в направлении оси Х. Вращение верхнего вала 223В передается нижнему валу 223D посредством пары зубчатых колес 224.
[0103] К концевым частям валов 223А-С, выступающим от одной поверхности рамы 221 (правой боковой поверхности рамы 221, если смотреть в направлении движения), соответственно присоединены ведомые шкивы 225А-С. Каждый из ведомых шкивов 225A-C представляет собой зубчатый шкив, который входит в зацепление с зубчатым ремнем 51 ременного передаточного механизма 50R. Одна концевая часть вала 223D выступает от другой поверхности рамы 221 (левой боковой поверхности рамы 221, если смотреть в направлении движения). К одной концевой части вала 223D присоединен ведущий шкив 231 ременного передаточного механизма 23, который будет описан позднее. То есть ременный передаточный механизм 50R, расположенный справа, и ременный передаточный механизм 23 соединены посредством ведомого компонента 22R, расположенного справа (в частности, посредством ведомого шкива 225В, вала 223В, пары зубчатых колес 224 и вала 223D).
[0104] Как показано стрелками на фиг.5, зубчатый ремень 51 ременного передаточного механизма 50 загнут посредством ведущих шкивов 52А и 52В для его разделения на верхнюю часть 51а и нижнюю часть 51b. Верхняя часть 51а и нижняя часть 51b натянуты в направлении движения каретки 20 и приводятся в движение в направлениях, противоположных друг другу. В частности, нижняя часть 51b зубчатого ремня 51, которая прикреплена к каретке 20, приводится в движение в направлении движения каретки вместе с кареткой 20, и верхняя часть 51а приводится в движение в направлении, противоположном направлению движения каретки 20 и нижней части 51b. Верхняя часть 51а зубчатого ремня 51, выполненная с возможностью перемещения в направлении, противоположном направлению перемещения каретки 20, намотана вокруг ведомых шкивов 225, присоединенных к каретке 20, и ведомые шкивы 225 приводятся в движение посредством верхней части 51а.
[0105] Мощность, подводимая от ременного передаточного механизма 50 к ведомому компоненту 22R, расположенному справа, передается испытательному колесу W посредством вспомогательного компонента для передачи мощности, состоящего из ременного передаточного механизма 23, устройства 30 для приложения крутящего момента, ременного передаточного механизма 24, шарнира 25 скользящего типа, предназначенного для передачи вращения с постоянной угловой скоростью, и шпиндельного компонента 28, которые показаны на фиг.6, и используется для приведения в движение испытательного колеса W. При такой конфигурации ременного передаточного механизма 50 и ведомого компонента 22R обеспечивается возможность приведения в движение как каретки 20, так и испытательного колеса W посредством зубчатого ремня 51.
[0106] Ведомый компонент 22L, расположенный слева, выполнен с такой же конфигурацией, как ведомый компонент 22R, расположенный справа и описанный выше, но выполнен двустороннесимметричным по отношению к ведомому компоненту 22R, расположенному справа. Кроме того, ведомый компонент 22L, расположенный слева, отличается от ведомого компонента 22R, расположенного справа, тем, что ведомый компонент 22L, расположенный слева, не включает в себя конструкцию для отбора части мощности, передаваемой ременным передаточным механизмом 50R, и передачи отобранной мощности вспомогательному компоненту для передачи мощности, предусмотренному для каретки 20 (в частности, вал 223D, два подшипника 222, обеспечивающие опору для вала 223D, и два зубчатых колеса 224). Хотя ведомый компонент 22L, расположенный слева, не является существенным компонентом, при наличии ведомого компонента 22L, расположенного слева, силы, которые каретка 20 воспринимает от ременных передаточных механизмов 50L и 50R, расположенных слева и справа, уравновешиваются, и движение каретки 20 становится устойчивым.
[0107] Как описано выше, в данном варианте осуществления выбрана конфигурация, в которой каретка 20 и испытательное колесо W приводятся в движение посредством использования мощности, передаваемой общим устройством для передачи мощности (то есть ременным передаточным механизмом 50R). Посредством данной конфигурации обеспечивается возможность приведения испытательного колеса W во вращение с окружной скоростью (скоростью вращения), которая постоянно соответствует скорости движения каретки 20 независимо от скорости движения каретки 20. Кроме того, для уменьшения величины работы, выполняемой устройством 30 для приложения крутящего момента (то есть потребления мощности), данный вариант осуществления выполнен с такой конфигурацией, что испытательное колесо W приводится во вращение с окружной скоростью, по существу такой же, как скорость движения каретки 20, когда устройство 30 для приложения крутящего момента не функционирует.
[0108] Как показано на фиг.6, механизм 20D приведения в движение шпинделя включает в себя ременный передаточный механизм 23, устройство 30 для приложения крутящего момента, ременный передаточный механизм 24 и шарнир 25 скользящего типа, предназначенный для передачи вращения с постоянной угловой скоростью. Мощность, передаваемая от ременного передаточного механизма 50R, расположенного справа, ременному передаточному механизму 23 посредством ведомого шкива 225В, вала 223В, пары зубчатых колес 224 и вала 223D ведомого компонента 22R (Фиг. 11), расположенного справа, передается шпиндельному компоненту 28 (фиг.4) посредством устройства 30 для приложения крутящего момента, ременного передаточного механизма 24 и шарнира 25 скользящего типа, предназначенного для передачи вращения с постоянной угловой скоростью, и обеспечивает приведение во вращение испытательного колеса W, установленного на шпиндельном компоненте 28. То есть часть мощности, генерированной приводными компонентами 14RA, 14RB, расположенными справа, используется для приведения в движение каретки 20, и другая часть данной мощности используется для приведения во вращение испытательного колеса W. То есть ременный передаточный механизм 50R, расположенный справа, образует часть средства для приведения в движение каретки 20 (средства приведения в движение каретки), а также образует часть средства для приведения в движение испытательного колеса W (средства приведения в движение испытательного колеса). Кроме того, вместе с ведомым компонентом 22R, расположенным справа, ременный передаточный механизм 50R, расположенный справа, функционирует в качестве средства для разделения мощности, генерированной приводными компонентами 14RA, 14RB, на мощность для приведения в движение каретки 20 и мощность для приведения в движение испытательного колеса W (средства распределения мощности).
[0109] Фиг.12 представляет собой боковое сечение устройства 30 для приложения крутящего момента. Устройство 30 для приложения крутящего момента генерирует крутящий момент, подлежащий приложению к испытательному колесу W, и выдает крутящий момент с «наложением» на вращательное движение, передаваемое ременным передаточным механизмом 23. Другими словами, устройство 30 для приложения крутящего момента может обеспечить приложение крутящего момента к испытательному колесу W (то есть устройство 30 для приложения крутящего момента может обеспечить приложение движущей силы или силы торможения между поверхностью 63а дорожного покрытия и испытательным колесом W) посредством изменения фазы вращательного движения, передаваемого ременным передаточным механизмом 23.
[0110] Устройство 30 для приложения крутящего момента функционирует в качестве второго средства генерирования мощности, выполненного с возможностью генерирования мощности для приведения во вращение испытательного колеса W, а также функционирует в качестве средства соединения мощности, выполненного с возможностью соединения мощности, генерированной серводвигателем 141 (первым электродвигателем) приводного компонента 14 (средства генерирования мощности), и мощности, генерированной описанным позднее серводвигателем 32 (вторым электродвигателем) устройства 30 для приложения крутящего момента.
[0111] При включении устройства 30 для приложения крутящего момента в механизм 20D приведения в движение шпинделя становится возможным разделение ролей между источником мощности (приводными компонентами 14RA, 14RB), предназначенным для регулирования скорости вращения, и источником мощности (серводвигателем 32, который будет описан позднее), предназначенным для регулирования крутящего момента. Благодаря данной конфигурации становятся возможными использование источника мощности, имеющего меньшую мощность, и регулирование скорости вращения и крутящего момента, подлежащего приложению к испытательному колесу W, с более высокой точностью. Кроме того, поскольку нагрузка, которая действует на ременный передаточный механизм 50R, уменьшается при встраивании устройства 30 для приложения крутящего момента в каретку 20, становятся возможными уменьшение размеров ременного передаточного механизма 50R (например, уменьшение числа используемых зубчатых ремней) и использование элементов с более низкой способностью выдерживать нагрузку.
[0112] Устройство 30 для приложения крутящего момента включает в себя корпус 31; серводвигатель 32, возможный, но необязательный редуктор 33 и вал 34, которые установлены внутри корпуса 31; два опорных компонента 35 и 36, выполненных с возможностью обеспечения опоры для корпуса 31 с возможностью его вращения; компонент 37 с токосъемными контактными кольцами; опорную стойку 38, выполненную с возможностью обеспечения опоры для компонента 37 с токосъемными контактными кольцами, и кодовый датчик 39 угла поворота, выполненный с возможностью определения скорости вращения корпуса 31.
[0113] В данном варианте осуществления в качестве серводвигателя 32 используется высокомощный серводвигатель переменного тока с ротором со сверхнизкой инерцией, с моментом инерции вращающегося компонента, который равен или меньше 0,01 кг⋅м2 (более предпочтительно равен или меньше 0,008 кг⋅м2), и с номинальной мощностью, составляющей 3-60 кВт (более целесообразно 7-37 кВт).
[0114] Корпус 31 имеет часть 311 для размещения электродвигателя и закрывающую часть 312, которые являются по существу цилиндрическими и имеют большие диаметры, и две части 313, 314 в виде валов, которые являются по существу цилиндрическими и имеют диаметры, которые меньше диаметра части 311 для размещения электродвигателя. К концевой части (левой концевой части на фиг.12) части 311 для размещения электродвигателя коаксиально присоединена часть 313 в виде вала (то есть присоединена так, что часть 311 для размещения электродвигателя и часть 313 в виде вала имеют общую осевую линию). К другой концевой части (правой концевой части на фиг.12) части 311 для размещения электродвигателя коаксиально присоединена часть 314 в виде вала посредством закрывающей части 312. Часть 313 в виде вала опирается с возможностью вращения на опорный компонент 36, и часть 314 в виде вала опирается с возможностью вращения на опорный компонент 35.
[0115] Буртик 314а образован на концевом участке части 314 в виде вала, и ведомый шкив 232 ременного передаточного механизма 23 коаксиально присоединен к буртику 314а. Зубчатый ремень 233 ременного передаточного механизма 23 намотан вокруг ведомого шкива 232 и ведущего шкива 231 (фиг.11). Корпус 31 приводится во вращение посредством ременного передаточного механизма 23.
[0116] Подшипник 315 предусмотрен на внутренней периферии части 314 в виде вала. Вал 34 вставлен в полую часть части 314 в виде вала и опирается с возможностью вращения на подшипник 315. Вал 34 проходит через часть 314 в виде вала и ведомый шкив 232. Концевая часть вала 34 выступает во внутреннее пространство закрывающей части 312. Ведущий шкив 241 ременного передаточного механизма 24 коаксиально соединен с другой концевой частью вала 34, которая прошла через отверстие 232а ведомого шкива 232. Зубчатый ремень 243 намотан вокруг ведущего шкива 241.
[0117] Серводвигатель 32 размещен в полой части части 311 для размещения вала. Вал 321 серводвигателя 32 расположен коаксиально по отношению к части 311 для размещения электродвигателя (то есть оси вращения корпуса 31), и корпус 320 электродвигателя (то есть статор), представляющего собой серводвигатель 32, прикреплен к части 311 для размещения электродвигателя посредством множества болтов 323 с двусторонней резьбой. Фланец 322 серводвигателя 32 присоединен к корпусу 331 редуктора 33 посредством соединительной трубы 324. Корпус 331 редуктора 33 прикреплен к внутреннему фланцу 312а закрывающей части 312.
[0118] Вал 321 серводвигателя 32 соединен с входным валом 332 редуктора 33. Вал 34 соединен с выходным валом 333 редуктора 33. Крутящий момент на выходе серводвигателя 32 повышается посредством редуктора 33 и передается валу 34. Вращение вала 34 на выходе, сообщаемое ременному передаточному механизму 24, представляет собой результат суперпозиции вращения корпуса 31, приводимого в движение ременным передаточным механизмом 23, и крутящего момента, генерируемого серводвигателем 32 и редуктором 33. То есть часть 314 корпуса 31, выполненная в виде вала, представляет собой входной вал устройства 30 для приложения крутящего момента, и вал 34 представляет собой выходной вал устройства 30 для приложения крутящего момента. На выходе устройства 30 для приложения крутящего момента получают крутящий момент, генерированный устройством 30 для приложения крутящего момента, посредством выходного вала при суперпозиции крутящего момента и вращательного движения, передаваемого входному валу.
[0119] Компонент 37 с токосъемными контактными кольцами включает в себя множество пар, состоящих из токосъемного контактного кольца 37а и щетки 37b, опорную раму 37с и соединительную трубу 37d. Множество токосъемных контактных колец 37а расположены на расстоянии друг от друга и установлены и закреплены на наружной периферии соединительной трубы 37d.
[0120] Соединительная труба 37d коаксиально присоединена к части 313 корпуса 31, выполненной в виде вала. Щетки 37b, контактирующие с наружными перифериями соответствующих токосъемных контактных колец 37а, опираются на опорную раму 37с, присоединенную к опорной стойке 38. Кабель 325 серводвигателя 32 проходит через полую часть части 313 в виде вала и соединен с токосъемными контактными кольцами 37а. Щетки 37b соединены с сервоусилителем 32а (фиг.27). То есть серводвигатель 32 и сервоусилитель 32а соединены друг с другом посредством компонента 37 с токосъемными контактными кольцами.
[0121] Как показано на фиг.4 и 6, ведомый шкив 242, вокруг которого намотан зубчатый ремень 243 ременного передаточного механизма 24, коаксиально соединен с концевой частью вала 261, опирающегося с возможностью вращения на опорный компонент 262. Другая концевая часть вала 261 соединена с концевой частью шарнира 25 скользящего типа, предназначенного для передачи вращения с постоянной угловой скоростью. Другая концевая часть шарнира 25 скользящего типа, предназначенного для передачи вращения с постоянной угловой скоростью, соединена со шпинделем 280 (фиг.13) посредством вала 263 (фиг.13). Шарнир 25 скользящего типа, предназначенный для передачи вращения с постоянной угловой скоростью, выполнен с возможностью плавной передачи вращения без изменений вращения независимо от рабочего угла (то есть угла между входным валом и выходным валом). Шарнир 25 скользящего типа, предназначенный для передачи вращения с постоянной угловой скоростью, имеет переменную длину в его аксиальном направлении (то есть расстояние при передаче).
[0122] Шпиндельный компонент 28 опирается на компонент 40 для выставления так, что угол, под которым он расположен, и его положение являются переменными. При соединении шпинделя 280 (фиг.13) и вала 261, удерживаемого опорным компонентом 262, посредством шарнира 25 скользящего типа, предназначенного для передачи вращения с постоянной угловой скоростью, даже в случае, если угол и/или положение шпинделя 280 изменяются, шарнир 25 скользящего типа, предназначенный для передачи вращения с постоянной угловой скоростью, гибко адаптируется по форме к данному изменению. Следовательно, в шпинделе 280 и валах 261, 263 (фиг.13) не возникает большое напряжение, и поэтому вращение плавно передается шпинделю 280 без изменения скорости.
[0123] Как показано на фиг.5, компонент 40 для выставления включает в себя две поворотные рамы 41, две криволинейные направляющие траектории 42 (в дальнейшем упоминаемые кратко как «криволинейные направляющие»), скользящую раму 44 и две пары прямолинейных направляющих 43.
[0124] Каждая поворотная рама 41 установлена на основной раме 21 каретки 20 посредством криволинейной направляющей 42. Криволинейная направляющая 42 включает в себя дугообразную рельсовую направляющую 421, закрепленную на верхней поверхности основной рамы 21, и множество кареток (в данном варианте осуществления две каретки) 422 (в дальнейшем упоминаемые как «подвижные элементы 422»), которые могут перемещаться по рельсовой направляющей 421. Подвижные элементы 422 присоединены к нижней поверхности поворотной рамы 41. Две криволинейные направляющие 42 и две поворотные рамы 41 соответственно расположены напротив друг друга в направлении вперед-назад с обеих сторон по отношению к вертикальной линии V, проходящей через центр С испытательного колеса W. Центр кривизны каждой криволинейной направляющей 42 находится на вертикальной линии V. То есть каждая поворотная рама 41 опирается на криволинейную направляющую 42 с возможностью поворота вокруг вертикальной линии V.
[0125] Как показано на фиг.4, скользящая рама 44 имеет часть 441 в виде стойки, соединительную часть 442 и вильчатый элемент 443, расположенные в данном порядке от верхней части. Часть 441 в виде стойки (то есть верхняя часть скользящей рамы 44) расположена вертикально так, что ее осевая линия совпадает с вертикальной линией V. Часть 441 в виде стойки расположена между двумя поворотными рамами 41 и соединена с каждой поворотной рамой 41 посредством двух пар прямолинейных направляющих 43 с возможностью скольжения в вертикальном направлении. Прямолинейная направляющая 43 включает в себя рельсовую направляющую 431, присоединенную к той боковой поверхности 441а части 441 в виде стойки, которая обращена к поворотной раме 41, и множество кареток (в данном варианте осуществления две каретки) 432 (в дальнейшем упоминаемых как «подвижные элементы 432»), выполненных с возможностью перемещения по рельсовой направляющей 431. Подвижный элемент 432 присоединен к той боковой поверхности 41а поворотной рамы 41, которая обращена к части 441 в виде стойки.
[0126] Вильчатый элемент 443 (то есть нижняя часть скользящей рамы 44) установлен справа (в направлении оси Ay вращения) по отношению к вертикальной линии V так, чтобы он не контактировал с испытательным колесом W. Соединительная часть 442 проходит в направлении оси Y и соединяет вместе нижнюю концевую часть части 441 в виде стойки и верхнюю концевую часть вильчатого элемента 443. Следовательно, скользящая рама 44 образована по существу с формой кривошипа, если смотреть в направлении оси Х.
[0127] Как показано на фиг.5, нижняя часть вильчатого элемента 443 разветвлена в направлении вперед-назад. На нижних концевых частях вильчатого элемента 443, разветвленного на две части, предусмотрены соответствующие подшипники 443а, коаксиальные по отношению друг к другу.
[0128] Фиг.13 представляет собой схематическое изображение, показывающее шпиндельный компонент 28 и зону вокруг него. Шпиндельный компонент 28 расположен между двумя подшипниками 443а (фиг.5), предусмотренными на нижних концевых частях вильчатого элемента 443, при этом центральная ось (ось Ay вращения) шпинделя 280 ориентирована в направлении влево-вправо. Шпиндельный компонент 28 опирается на два подшипника 443а с возможностью поворота вокруг оси Сx поворота, проходящей в направлении вперед-назад. Направления оси Ay вращения шпинделя 280 и оси Сx поворота корпуса 284 для шпинделя изменяются в соответствии с выставлением шпинделя 280 и, следовательно, необязательно совпадают соответственно с направлением оси Y и направлением оси Х.
[0129] Шпиндельный компонент 28 включает в себя шпиндель 280 и корпус 284 для шпинделя, выполненный с возможностью обеспечения опоры для шпинделя 280 с возможностью вращения. Шпиндель 280 представляет собой ось, на которой должно быть установлено испытательное колесо W и которая вращается как одно целое с испытательным колесом W. Шпиндель 280 включает в себя основную часть 281, датчик 282 шести составляющих сил и ступицу 283. Основная часть 281 представляет собой цилиндрический вал. Датчик 282 шести составляющих сил представляет собой по существу цилиндрический элемент, который коаксиально присоединен к концевой части основной части 281 и представляет собой пьезоэлектрический датчик силы, который выполнен с возможностью измерения шести составляющих сил (сил, действующих в направлениях трех осей, ортогональных друг к другу, и крутящих моментов вокруг соответствующих осей). Ступица 283 представляет собой элемент для присоединения испытательного колеса W и коаксиально присоединена к рабочему концу датчика 282 шести составляющих сил. Основная часть 281, датчик 282 шести составляющих сил и ступица 283 соединены с образованием одного целого для формирования шпинделя 280. Поскольку испытательное колесо W присоединено к датчику 282 шести составляющих сил посредством ступицы 283 с образованием одного целого с ними, сила, действующая на испытательное колесо, может быть рассчитана исходя из результата измерения, полученного датчиком 282 шести составляющих сил. Кроме того, поскольку датчик 282 шести составляющих сил расположен рядом с центром испытательного колеса W, результат измерения, полученный датчиком 282 шести составляющих сил, может быть использован в качестве приблизительного значения шести составляющих сил, действующих на испытательное колесо W.
[0130] Корпус 284 для шпинделя представляет собой по существу цилиндрический элемент, выполненный с возможностью размещения шпинделя 280 в нем и удерживания шпинделя 280 с возможностью вращения. К внутренней периферии корпуса 284 для шпинделя присоединены подшипник 285 и два подшипника 286. Шпиндель 280 опирается на подшипник 285 и подшипники 286 с возможностью вращения.
[0131] К боковым поверхностям корпуса 284 для шпинделя спереди и сзади присоединены две оси 287 поворота, на которых соответствующие два подшипника 443а (фиг.5) вильчатого элемента 443 установлены с возможностью поворота. То есть шпиндельный компонент 28 опирается на два подшипника 443а с возможностью его поворота вокруг оси Сx поворота.
[0132] Как показано на фиг.4, компонент 40 для выставления включает в себя компонент 45 для регулирования нагрузки, компонент 46 для регулирования угла увода и компонент 47 для регулирования угла развала. Компонент 45 для регулирования нагрузки представляет собой узел, выполненный с возможностью регулирования нагрузки, действующей на испытательное колесо. Компонент 46 для регулирования угла увода представляет собой узел, выполненный с возможностью регулирования угла увода испытательного колеса W посредством обеспечения поворота компонента 40 для выставления (более конкретно, поворотной рамы 41) вокруг вертикальной линии V. Компонент 47 для регулирования угла развала представляет собой узел, выполненный с возможностью регулирования угла развала испытательного колеса W посредством обеспечения поворота шпиндельного компонента 28 вокруг оси Cх поворота (фиг.13).
[0133] Компонент 45 для регулирования нагрузки включает в себя серводвигатель 451, преобразователь 452 движения и кронштейн 453. Вышеописанная прямолинейная направляющая 43 также является одним из компонентов, образующих компонент 45 для регулирования нагрузки. Серводвигатель 451 присоединен к основной раме 21 каретки 20. Преобразователь 452 движения представляет собой устройство, выполненное с возможностью преобразования вращения серводвигателя 451 в вертикальное прямолинейное перемещение установленного вертикально, подвижного элемента 452а. В качестве преобразователя 452 движения используется, например, реечная передача, механизм, в котором соединены пересекающиеся валы, такие как вал с коническим зубчатым колесом и ходовой винт, или механизм, в котором соединены расположенный под углом вал, такой как вал с червячным колесом или винтовым зубчатым колесом, и ходовой винт. Кронштейн 453 расположен непосредственно под подвижным элементом 452а преобразователя 452 движения и присоединен к боковой поверхности той части 441 скользящей рамы 44, которая имеет вид стойки, при этом фланец 453а обращен вверх.
[0134] Когда обеспечивается опускание подвижного элемента 452а преобразователя 452 движения посредством приведения в действие серводвигателя 451, нижняя концевая часть подвижного элемента 452а упирается во фланец 453а кронштейна 453. При дальнейшем приведении серводвигателя 451 в действие скользящая рама 44 поджимается в вертикальном направлении вниз с помощью подвижного элемента 452а посредством кронштейна 453. Посредством этого испытательное колесо W, удерживаемое компонентом 40 для выставления, поджимается к поверхности 63а дорожного покрытия, и нагрузка, зависящая от высоты (то есть положения в направлении оси Z) подвижного элемента 452а, действует между испытываемой шиной Т и поверхностью 63а дорожного покрытия. Нагрузка, которая действует на испытательное колесо W, измеряется датчиком 282 шести составляющих сил (фиг.13), предусмотренным в шпиндельном компоненте 28. Управление приведением в действие серводвигателя 451 осуществляется так, чтобы измеренная нагрузка совпадала с заданным значением нагрузки.
[0135] Как показано на фиг.6, часть компонента 45 для регулирования нагрузки расположена в пространстве Sp2, окруженном двумя поворотными рамами 41 и той частью 441 скользящей рамы 44, которая имеет вид стойки. При данной конфигурации эффективно используется пространство и обеспечивается уменьшение размеров каретки.
[0136] Как показано на фиг.4, компонент 46 для регулирования угла увода включает в себя серводвигатель 461, присоединенный к основной раме 21 каретки 20, редуктор 462, ведущее зубчатое колесо 463, присоединенное к выходному валу редуктора 462, и ведомое зубчатое колесо 464, которое входит в зацепление с ведущим зубчатым колесом 463. В качестве ведущего зубчатого колеса 463 используется, например, прямозубое цилиндрическое зубчатое колесо или зубчатый сектор. Ведомое зубчатое колесо 464 представляет собой, например, зубчатый сектор. В качестве зубчатого механизма (ведущего зубчатого колеса 463 и ведомого зубчатого колеса 464) компонента 46 для регулирования угла увода можно использовать червячную передачу, коническую зубчатую передачу, винтовую зубчатую передачу и тому подобное. Серводвигатель 461, редуктор 462 и ведущее зубчатое колесо 463 присоединены к основной раме 21 каретки 20. Ведомое зубчатое колесо 464 присоединено к боковой поверхности той части 441 скользящей рамы 44, которая имеет вид стойки, так, что ось поворота ведомого зубчатого колеса 464 совпадает с вертикальной линией V.
[0137] Редуктор 462 обеспечивает уменьшение частоты вращения серводвигателя 461 и передачу вращения ведомому зубчатому колесу 464 посредством ведущего зубчатого колеса 463. Посредством этого ведомое зубчатое колесо 464 и скользящая рама 44 поворачиваются вокруг вертикальной линии V. В результате испытательное колесо W, опирающееся на скользящую раму 44 посредством шпиндельного компонента 28, также поворачивается вокруг вертикальной линии V, и угол увода испытательного колеса W изменяется.
[0138] Как показано на фиг.6, часть компонента 46 для регулирования угла увода расположена в пространстве Sp3, окруженном двумя поворотными рамами 41 и той частью 441 скользящей рамы 44, которая имеет вид стойки. При данной конфигурации эффективно используется пространство и обеспечивается уменьшение размеров каретки. Пространство Sp2, в котором размещен компонент 45 для регулирования нагрузки, и пространство Sp3, в котором размещен компонент 46 для регулирования угла увода, представляют собой пространства, которые образованы с противоположных сторон части 441 в виде стойки в направлении влево-вправо. При размещении компонента 45 для регулирования нагрузки и компонента 46 для регулирования угла увода в разных пространствах повышаются эффективности сборки и технического обслуживания.
[0139] Как показано на фиг.13, компонент 47 для регулирования угла развала включает в себя верхний рычаг 471, присоединенный к правой концевой части соединительной части 442, соединительный элемент 472, опирающийся на верхний рычаг 471 с возможностью поворота, болт 475 с резьбой на всей длине (в дальнейшем упоминаемый как «шпилька 465»), к которому присоединен соединительный элемент 472, наконечник 476, присоединенный к одной концевой части шпильки 475, и нижний рычаг 478, присоединенный с возможностью поворота к наконечнику 476 посредством штифта 477. Концевая часть нижнего рычага 478 прикреплена к корпусу 284 для шпинделя. Следует отметить, что верхний рычаг 471 может быть присоединен к вильчатому элементу 443 скользящей рамы 44.
[0140] Верхний рычаг 471 представляет собой плоскую пластину, проходящую параллельно оси Ay вращения (то есть в направлении от вертикальной линии V), и расположен перпендикулярно к оси Cх поворота корпуса 284 для шпинделя. На концевой части верхнего рычага 471 предусмотрена ось 471а поворота, параллельная оси Cх поворота.
[0141] Соединительный элемент 472 представляет собой по существу кубоидальный элемент, в котором образовано сквозное отверстие для вставки шпильки 475. В соединительном элементе 472 предусмотрен подшипник 473, который установлен на оси 471а поворота верхнего рычага 471 с возможностью поворота. То есть соединительный элемент 472 оперт с возможностью поворота вокруг оси 471а поворота, которая параллельна оси Сx поворота корпуса 284 для шпинделя. Соединительный элемент 472 зажат между двумя гайками 474, установленными на шпильке 475, и зафиксирован относительно шпильки 475.
[0142] Концевая часть нижнего рычага 478 присоединена к нижней концевой части наконечника 476 посредством штифта 477. Штифт 477, который соединяет вместе наконечник 476 и нижний рычаг 478, также представляет собой ось поворота, параллельную оси Сx поворота корпуса 284 для шпинделя. То есть скользящая рама 44 и верхний рычаг 471 (первое соединительное звено), шпилька 475 и наконечник 476 (второе соединительное звено) и нижний рычаг 478 и корпус 284 для шпинделя (третье соединительное звено) соединены «по кругу» вместе посредством трех осей поворота, параллельных оси Сx поворота [оси 471а поворота (первого шарнира), штифта 477 (второго шарнира) и оси 287 поворота (третьего шарнира)], с возможностью поворота вокруг соответствующих осей поворота, посредством чего образуется рычажный механизм.
[0143] Длина соединительного звена 47L переменной длины, соединяющего два шарнира (ось 471а поворота и штифт 477), изменяется при изменении положений гаек 474 вдоль шпильки 475. При этом нижний рычаг 478 и корпус 284 для шпинделя поворачиваются вокруг оси 287 поворота (оси Cx поворота), и изменяется угол наклона оси Ay вращения шпинделя 280 и испытательного колеса W относительно поверхности 63а дорожного покрытия. Следовательно, существует возможность регулирования угла развала посредством увеличения и уменьшения длины соединительного звена 47L переменной длины за счет изменения положений гаек 474 вдоль шпильки 475. Угол развала изменяется в сторону отрицательных значений при увеличении длины соединительного звена 47L переменной длины и изменяется в сторону положительных значений при уменьшении длины соединительного звена 47L переменной длины.
[0144] Устройство 1 для испытаний шин включает в себя тормозную систему 27 (в дальнейшем упоминаемую кратко как «тормоз 27»), которая может обеспечить уменьшение скорости вращения шпинделя 280. Тормоз 27 включает в себя тормозной диск 271, присоединенный к шпинделю 280 посредством крепежного элемента 273, который будет описан позднее, скобу 272, присоединенную к нижнему рычагу 478, и устройство 276 подачи гидравлического давления (фиг.27), выполненное с возможностью подачи гидравлического давления к скобе 272.
[0145] Устройство 276 подачи гидравлического давления генерирует заданное гидравлическое давление на основе команды от управляющего компонента 72, который будет описан позднее, и обеспечивает подачу гидравлического давления к скобе 272. Устройство 276 подачи гидравлического давления включает в себя серводвигатель 276b, преобразователь 276с движения, выполненный с возможностью преобразования вращательного движения на выходе серводвигателя 276b в прямолинейное перемещение, главный тормозной цилиндр 276d, выполненный с возможностью приведения его в действие посредством прямолинейного перемещения на выходе преобразователя 276с движения, и сервоусилитель 276а, выполненный с возможностью генерирования тока возбуждения, подлежащего подаче в серводвигатель 276b, на основе команды от управляющего компонента 72.
[0146] Шпиндель 280 соединен с шарниром 25 скользящего типа, предназначенным для передачи вращения с постоянной угловой скоростью и предусмотренным в механизме 20D приведения в движение шпинделя (фиг.6), посредством крепежного элемента 273, тормозного диска 271 и вала 263.
[0147] Нижний рычаг 478 образован с формой кривошипа, средняя часть которого установлена с верхней стороны (то есть в направлении от шпинделя 280). Скоба 272 тормоза 27 присоединена к средней части нижнего рычага 478, будучи удаленной от шпинделя 280 посредством крепежного элемента 275.
[0148] Крепежный элемент 273 и вал 263 представляют собой заменяемые элементы малого размера, которые изготовлены в соответствии с формой тормозного диска 271. Крепежный элемент 275 представляет собой относительно легко заменяемую и недорогую деталь малого размера, которая изготовлена в соответствии с формой скобы 272. При использовании крепежных элементов 273, 275 и вала 263 становится возможным изменение типов тормоза 27 с более низкими затратами, поскольку становится ненужной замена шпинделя 280 и/или шарнира 25 скользящего типа, предназначенного для передачи вращения с постоянной угловой скоростью, затраты на замену которых являются относительно высокими при изменении типов тормоза 27 (тормозного диска 271 и скобы 272).
[0149] Фиг.14 представляет собой поперечное сечение компонента 60 с поверхностью дорожного покрытия. Компонент 60 с поверхностью дорожного покрытия включает в себя раму 61 и компонент 60а, образующий основную часть и опирающийся на раму 61. Компонент 60а, образующий основную часть, включает в себя основание 62 и компонент 63, образующий дорожное покрытие и удерживаемый основанием 62. На верхней поверхности основания 62 образовано углубление 621, проходящее в направлении, в котором проходит компонент 60 с поверхностью дорожного покрытия (то есть в направлении оси Х, представляющем собой направление движения каретки 20). Компонент 63, образующий дорожное покрытие, образован, например, посредством заполнения углубления 621 материалом имитирующего дорожного покрытия, который будет описан позднее, и отверждения материала имитирующего дорожного покрытия. На верхней поверхности компонента 63, образующего дорожное покрытие, образована поверхность 63а дорожного покрытия, с которой контактирует испытательное колесо W.
[0150] В данном варианте осуществления компонент 60а, образующий основную часть, образован из единичных элементов 600а компонента, образующего основную часть, которые представляют собой элементы с поверхностью дорожного покрытия (сменные конструкции, каждая из которых имеет по меньшей мере участок поверхности 63а дорожного покрытия), и присоединен к раме 61 с возможностью отсоединения. Элемент с поверхностью дорожного покрытия не ограничен конфигурацией, в которой компонент 60а, образующий основную часть, собран из отдельных элементов (в дальнейшем упоминаемых как «единичный элемент компонента, образующего основную часть»), как в данном варианте осуществления, но может быть образован с конфигурацией, в которой только компонент 63, образующий дорожное покрытие, собран из отдельных элементов (упоминаемых в дальнейшем как «единичный элемент компонента, образующего дорожное покрытие»), или с конфигурацией, в которой весь компонент 60 с поверхностью дорожного покрытия, включая раму 61, собран из единичных элементов (в дальнейшем упоминаемых как «единичный элемент компонента с поверхностью дорожного покрытия»).
[0151] Компонент 60а, образующий основную часть, по данному варианту осуществления образован из множества единичных элементов 600а компонента, образующего основную часть, которые образованы посредством разделения компонента 60а, образующего основную часть, в направлении, в котором проходит компонент 60 с поверхностью дорожного покрытия, и выполнен с возможностью его замены с помощью единичных элементов 600а компонента, образующего основную часть. Следует отметить, что весь компонент 60а, образующий основную часть, может быть образован в виде одного сменного элемента с поверхностью дорожного покрытия.
[0152] При образовании компонента 60 с поверхностью дорожного покрытия из элементов с поверхностью дорожного покрытия, таких как единичные элементы 600а компонента, образующего основную часть, как в данном варианте осуществления, становится возможной замена по меньшей мере части поверхности 63а дорожного покрытия с помощью замены элемента с поверхностью дорожного покрытия.
[0153] Например, только тот единичный элемент 600а компонента, образующего основную часть, который расположен в той части компонента 60 с поверхностью дорожного покрытия, которая является центральной в направлении прохождения (направлении оси Х), может быть заменен для изменения типа компонента 63, образующего дорожное покрытие (например, материалов, структур, профилей поверхности и тому подобного), только в центральной части. Кроме того, тип компонента 63, образующего дорожное покрытие, может быть изменен для каждого единичного элемента 600а компонента, образующего основную часть, например, так, что коэффициент трения поверхности 63а дорожного покрытия будет изменяться в направлении, в котором проходит компонент 60 с поверхностью дорожного покрытия.
[0154] На нижней поверхности основания 62 выполнено углубление 622, в которое вставляется выступающая часть 612, предусмотренная на верхней поверхности рамы 61. Единичный элемент 600а компонента, образующего основную часть, присоединен к раме 61 с возможностью отсоединения посредством размещения единичного элемента 600а компонента, образующего основную часть, на раме 61 так, чтобы выступающая часть 612 и углубление 622 «сопрягались» друг с другом, и посредством прикрепления единичного элемента 600а компонента, образующего основную часть, к раме 61 с помощью (непоказанных) средств крепления, таких как болты или кулачковые рычаги.
[0155] В представленном варианте осуществления рама 61 образована из множества единичных элементов 610 рамы, образованных посредством разделения рамы 61 в направлении ее протяженности, и может быть заменена посредством единичных элементов 610 рамы.
[0156] В представленном варианте осуществления единичный элемент 610 рамы и единичный элемент 600а компонента, образующего основную часть, образованы с одинаковой длиной, и поэтому также возможна замена с помощью единичных элементов 600 компонента с поверхностью дорожного покрытия, в которых единичный элемент 600а компонента, образующего основную часть, присоединен к единичному элементу 610 рамы.
[0157] В представленном варианте осуществления компонент 63, образующий дорожное покрытие, образован как одно целое с основанием 62. Однако компонент 63, образующий дорожное покрытие, может быть выполнен с возможностью отсоединения от основания 62 и присоединения к основанию 62. Например, компонент 63, образующий дорожное покрытие, может быть образован из множества единичных элементов 630 компонента, образующего дорожное покрытие, которые образованы посредством разделения компонента 63, образующего дорожное покрытие, в направлении, в котором проходит компонент 60 с поверхностью дорожного покрытия, и может быть образован с возможностью его замены с помощью единичных элементов 630 компонента, образующего дорожное покрытие. В этом случае единичный элемент 630 компонента, образующего дорожное покрытие, и единичный элемент 620 основания могут быть образованы с одинаковой длиной для обеспечения возможности замены с помощью комплексных единичных элементов, в которых единичный элемент 630 компонента, образующего дорожное покрытие, присоединен к единичному элементу 620 основания (другими словами, с помощью единичного элемента 600а компонента, образующего основную часть, в котором компонент 63, образующий дорожное покрытие, выполнен отсоединяемым). Кроме того, единичный элемент 610 рамы, единичный элемент 620 основания и единичный элемент 630 компонента, образующего дорожное покрытие, могут быть собраны для формирования единичного элемента 600 компонента с поверхностью дорожного покрытия, чтобы обеспечить возможность замены с помощью единичных элементов 600 компонента с поверхностью дорожного покрытия,
[0158] Как описано выше, в данном варианте осуществления множество единичных элементов 600 компонента с поверхностью дорожного покрытия соединены для формирования компонента 60 с поверхностью дорожного покрытия. При данной конфигурации можно удлинить или укоротить компонент 60 с поверхностью дорожного покрытия посредством добавления или удаления единичного элемента 600 компонента с поверхностью дорожного покрытия. Кроме того, при образовании множества единичных элементов с поверхностью дорожного покрытия так, чтобы они имели одинаковую конструкцию, становится возможным эффективное изготовление компонента 60 с поверхностью дорожного покрытия.
[0159] В представленном варианте осуществления, как и в случае компонента 60 с поверхностью дорожного покрытия, направляющий компонент 10 разделен на множество единичных элементов 100 направляющего компонента в направлении, в котором он проходит. Также можно удлинить или укоротить направляющий компонент 10 посредством добавления или удаления единичного элемента 100 направляющего компонента. Единичный элемент 100 направляющего компонента образован с такой же длиной, как единичный элемент 600 компонента с поверхностью дорожного покрытия. Следовательно, можно сформировать направляющий компонент 10 и компонент 60 с поверхностью дорожного покрытия с одинаковой длиной. Компонент 60 с поверхностью дорожного покрытия и направляющий компонент 10 также могут быть выполнены с возможностью их удлинения, укорачивания или частичной замены с помощью комплексного единичного элемента, в котором единичный элемент 100 направляющего компонента и единичный элемент 600 компонента с поверхностью дорожного покрытия объединены в одно целое.
[0160] В компоненте 60 с поверхностью дорожного покрытия по представленному варианту осуществления имитирующее дорожное покрытие, имитирующее дорогу с асфальтированным покрытием (то есть дорожное покрытие, влияние которого на шину, такое как объем изнашивания шины, сопоставимо с реальной дорогой с асфальтированным покрытием), образовано в качестве компонента 63, образующего дорожное покрытие. Имитирующее дорожное покрытие образовано, например, посредством придания определенной формы материалу и отверждения материала имитирующего дорожного покрытия, в котором связующее, например, такое как уретановая смола или эпоксидная смола, добавлено к заполнителю, образованному посредством дробления (и дополнительного полирования и/или травления при необходимости) керамического материала с очень высокой износостойкостью, такого как карбид кремния или оксид алюминия. При использовании такого материала имитирующего дорожного покрытия может быть получена поверхность имитирующего дорожного покрытия с очень высокой износостойкостью и стабильным состоянием поверхности дорожного покрытия (то есть поверхность имитирующего дорожного покрытия, которая обеспечивает стабильный объем изнашивания испытываемой шины Т и тому подобные характеристики). Объем изнашивания шины можно регулировать, например, посредством размера частиц заполнителя и/или количества добавленного связующего.
[0161] Имитирующее дорожное покрытие по представленному варианту осуществления имеет однослойную структуру. Однако может быть использовано имитирующее дорожное покрытие, в котором множество слоев, образованных из разных материалов, наложены друг на друга в направлении толщины. Также могут быть использованы имитирующие дорожные покрытия, которые имитируют мостовую из плит, клинкерную мостовую, бетонное дорожное покрытие и тому подобное, например, посредством регулирования типов и/или размера частиц заполнителя и/или регулирования типов и/или количества связующего.
[0162] Поверхность 63а дорожного покрытия также может быть образована такой, чтобы она обеспечивала большее (или меньшее) повреждение шины, чем поверхность реального дорожного покрытия. Становится возможным выполнение испытания при ускоренном ухудшении состояния шины посредством использования поверхности 63а дорожного покрытия, которая оказывает большее влияние на шину, чем поверхность реального дорожного покрытия.
[0163] Компонент 63, образующий дорожное покрытие, может быть также образован из реального материала дорожного покрытия (например, асфальтовой смеси, используемый для поверхностного слоя асфальтового дорожного покрытия). Также может быть использован компонент 63, образующий дорожное покрытие и воспроизводящий или имитирующий не только поверхностный слой реального дорожного покрытия, образующего поверхность дороги, но и также структуру нижнего слоя реального дорожного покрытия.
[0164] Поскольку в устройстве 1 для испытаний шин по представленному варианту осуществления поверхность 63а дорожного покрытия не перемещается во время испытания, испытание может быть выполнено в состоянии, в котором постороннее вещество (например, вода, снег, грязная вода/жидкая грязь, грязь, песок, гравий, масло или тому подобное, или вещество, имитирующее вышеупомянутое постороннее вещество), оказывающее влияние на эксплуатационные характеристики шины, распределено по поверхности 63а дорожного покрытия. Например, при выполнении испытания в состоянии, в котором вода разлита по поверхности 63а дорожного покрытия, может быть выполнено испытание на торможение на мокрой поверхности дороги.
[0165] Будет описан вариант компонента 60 с поверхностью дорожного покрытия. Фиг.15 представляет собой поперечное сечение компонента 60А с поверхностью дорожного покрытия, представляющего собой вариант компонента 60 с поверхностью дорожного покрытия. Компонент 60А с поверхностью дорожного покрытия включает в себя рамный компонент 67, присоединенный к основанию 62. Рамный компонент 67 прикреплен к основанию 62 с обеспечением водонепроницаемости посредством заделки стыков или тому подобного и образует бассейн 68 вместе с основанием 62 и компонентом 63, образующим дорожное покрытие. Постороннее вещество (например, воду, гравий, грязь, опавшие листья или тому подобное), оказывающее влияние на эксплуатационные характеристики шины, размещают в бассейне 68 так, чтобы закрыть поверхность 63а дорожного покрытия. При использовании бассейна 68 становится возможным образование толстого слоя постороннего вещества на поверхности 63а дорожного покрытия. Рамный компонент 67 по данному варианту присоединен к верхней поверхности основания 62, но рамный компонент 67 может быть присоединен к боковым поверхностям основания 62. Рамный компонент 67 также может быть присоединен к верхней поверхности компонента 63, образующего дорожное покрытие.
[0166] Компонент 60А с поверхностью дорожного покрытия включает в себя средство 64 регулирования температуры, выполненное с возможностью регулирования температуры поверхности 63а дорожного покрытия. Средство 64 регулирования температуры по данному варианту имеет проточный канал 64а, образованный внутри основания 62, датчик 64b температуры, выполненный с возможностью измерения температуры поверхности 63а дорожного покрытия, и устройство 64с регулирования температуры (фиг.27). Датчик 64b температуры представляет собой датчик температуры контактного типа, в котором используется термопара, терморезистор или тому подобное, или датчик температуры бесконтактного типа, такой как датчик инфракрасного излучения. Устройство 64с регулирования температуры соединено с управляющим компонентом 72 и обеспечивает доведение температуры поверхности 63а дорожного покрытия до заданной температуры на основе команды от управляющего компонента 72. В частности, устройство 64с регулирования температуры регулирует температуру теплоносителя (например, масла или воды, содержащей жидкий антифриз) на основе результата измерения, полученного датчиком 64b температуры, и обеспечивает поступление теплоносителя в проточный канал 64а. Существует возможность доведения температуры поверхности 63а дорожного покрытия до заданной температуры посредством обеспечения протекания теплоносителя, температура которого отрегулирована посредством устройства регулирования температуры, по проточному каналу 64а. Наружная поверхность основания 62 покрыта теплоизоляционным материалом 69 для стабилизации температуры поверхности 63а дорожного покрытия и для повышения эффективности использования тепла.
[0167] Средство 64 регулирования температуры может регулировать температуру поверхности 63а дорожного покрытия в широком диапазоне от низкой температуры (например, от -40 градусов Цельсия) до высокой температуры (например, 80 градусов Цельсия). Можно образовать замерзшую поверхность дорожного покрытия посредством заполнения бассейна 68 водой и задания температуры уставки поверхности 63а дорожного покрытия ниже нуля. То есть можно выполнить испытание на торможение на льду посредством использования компонента 60А с поверхностью дорожного покрытия по данному варианту. Также можно выполнить испытание на торможение на снегу в состоянии, в котором бассейн 68 заполнен снегом.
[0168] Проточный канал 64а образован так, что он изгибается с постоянными интервалами внутри основания 62 параллельно поверхности 63а дорожного покрытия. Основание 62 разделено на множество секций (единичных элементов 620 основания) в направлении его длины, и соответствующие проточные каналы 64а образованы в соответствующих секциях. При данной конфигурации становится возможным более равномерное регулирование температуры всей поверхности 63а дорожного покрытия.
[0169] Далее будет описан компонент 165 для измерения нагрузки. Компонент 165 для измерения нагрузки представляет собой конструкцию, которая обеспечивает возможность определения распределения нагрузки, действующей на протектор шины.
[0170] Фиг.16 и 17 представляют собой соответственно вид в плане и вид слева компонента 165 для измерения нагрузки и зоны вокруг компонента 165 для измерения нагрузки, который предусмотрен в компоненте 60 с поверхностью дорожного покрытия. Фиг.18, 19 и 20 представляют собой соответственно вид спереди, вид слева и вид в плане компонента 165 для измерения нагрузки.
[0171] Как показано на фиг.16 и 17, на верхней поверхности компонента 60а, образующего основную часть и предусмотренного в компоненте 60 с поверхностью дорожного покрытия, образовано углубление 60р, удлиненное в направлении оси Y. Компонент 165 для измерения нагрузки размещен внутри углубления 60р и прикреплен к нижней стороне углубления 60р.
[0172] Как показано на фиг.18-20, компонент 165 для измерения нагрузки включает в себя неподвижную раму 1658, подвижную раму 1659, две прямолинейные направляющие 1654, блок 1650 с матрицей датчиков, устройство 1655 для обеспечения перемещения и компонент 1656 для определения положения датчиков. На фиг.18 исключены прямолинейные направляющие 1654 и компоненты 1658b неподвижной рамы 1658, обеспечивающие опору для рельсовых направляющих, которые будут описаны позднее. Подвижная рама 1659 опирается на две прямолинейные направляющие 1654 с возможностью ее перемещения в направлении оси Y (то есть в направлении ширины компонента 60 с поверхностью дорожного покрытия). Блок 1650 с матрицей датчиков присоединен к верхней поверхности подвижной рамы 1659. Детали блока 1650 с матрицей датчиков будут описаны позднее.
[0173] Фиг.21 представляет собой вид в плане, показывающий компонент 165 для измерения нагрузки в состоянии, в котором подвижный компонент (то есть подвижная рама 1659 и блок 1650 с матрицей датчиков) удален.
[0174] Как показано на фиг.19 и 21, неподвижная рама 1658 включает в себя по существу прямоугольную базовую плиту 1658а и два компонента 1658b, обеспечивающих опору для рельсовых направляющих и закрепленных на верхней поверхности базовой плиты 1658а. Два компонента 1658b, обеспечивающих опору для рельсовых направляющих, расположены с интервалом между ними в направлении оси Х, при этом направления их длины ориентированы в направлении оси Y.
[0175] Прямолинейная направляющая 1654 включает в себя рельсовую направляющую 1654а, проходящую в направлении оси Y, и множество кареток (в данном варианте осуществления три каретки) 1654b (упоминаемых в дальнейшем как «подвижные элементы 1654b»), выполненных с возможностью перемещения по рельсовой направляющей 1654а. Рельсовая направляющая 1654а присоединена к верхней поверхности компонента 1658b, обеспечивающего опору для рельсовой направляющей. Подвижные элементы 1654b присоединены к нижней поверхности подвижной рамы 1659. Перемещение подвижной рамы 1659 в направлении оси Y направляется посредством прямолинейных направляющих 1654.
[0176] Устройство 1655 для обеспечения перемещения расположено между двумя компонентами 1658b, обеспечивающими опору для рельсовых направляющих, и двумя прямолинейными направляющими 1654. Устройство 1655 для обеспечения перемещения включает в себя серводвигатель 1655m и шариковый винтовой механизм 1655b. Шариковый винтовой механизм 1655b включает в себя шариковый винт 1655ba, гайку 1655bb, опору 1655bc и опору 1655bd.
[0177] Шариковый винт 1655ba опирается с возможностью вращения на две опоры 1655bc и 1655bd на обоих концах шарикового винта 1655ba. Один конец шарикового винта 1655ba соединен с валом серводвигателя 1655m. Гайка 1655bb, соединенная с шариковым винтом 1655ba, присоединена к нижней поверхности подвижной рамы 1659. При вращении шарикового винта 1655ba посредством серводвигателя 1655m подвижная рама 1659 и блок 1650 с матрицей датчиков перемещаются в направлении оси Y вместе с гайкой 1655bb. То есть положение блока 1650 с матрицей датчиков в направлении оси Y может быть изменено посредством приведения серводвигателя 1655m в действие для вращения.
[0178] Как показано на фиг.21, компонент 1656 для определения положения датчиков включает в себя подвижный рычаг 1656а, множество датчиков (в данном варианте осуществления три датчика) 1656с близости и компонент 1656b для крепления датчиков. Концевая часть подвижного рычага 1656а прикреплена к подвижной раме 1659, и подвижный рычаг 1656а выполнен с возможностью перемещения в направлении оси Y вместе с подвижной рамой 1659. Компонент 1656b для крепления датчиков присоединен к неподвижной раме 1658.
[0179] Множество датчиков 1656с близости расположены с интервалами в направлении оси Y (например, с постоянными интервалами), при этом их воспринимающие поверхности 1656cf ориентированы в положительном направлении оси Х, и датчики 1656с прикреплены к компоненту для крепления датчиков.
[0180] На концевой части подвижного рычага 1656а образована часть 1656ap для взаимодействия с датчиками близости, соседняя с датчиками 1656с близости. В данном варианте осуществления часть 1656ар для взаимодействия с датчиками близости образована посредством загибания концевой части подвижного рычага 1656а с формой кривошипа. Часть 1656ар для взаимодействия с датчиками близости расположена на той же высоте, что и воспринимающие поверхности 1656cf множества датчиков 1656с близости. Воспринимающие поверхности 1656cf множества датчиков 1656с близости расположены в пределах интервала возможного перемещения части 1656ар, предназначенной для взаимодействия с датчиками близости, в направлении оси Y с интервалами между данными поверхностями.
[0181] Фиг.22 представляет собой увеличенный вид зоны Е, окруженной штрихпунктирной линией с двумя точками на фиг.18. Как показано на фиг.18 и 22, блок 1650 с матрицей датчиков включает в себя раму 1650а и множество (в данном варианте осуществления 150) модулей 1650m измерения нагрузки. В центральной части верхней поверхности рамы 1650а образовано углубление 1650ар, длинное в направлении оси Y. Множество модулей 1650m измерения нагрузки размещены в углублении 1650ар и прикреплены к нижней стороне углубления 1650ар.
[0182] Множество модулей 1650m измерения нагрузки расположены в направлении оси Х и в направлении оси Y в узлах решетки с постоянными интервалами (например, по существу без зазора между ними). В данном варианте осуществления 150 модулей 1650m измерения нагрузки расположены в 5 рядах в направлении оси Х и 30 рядах в направлении оси Y.
[0183] Модуль 1650m измерения нагрузки включает в себя датчик 1651 трех составляющих силы, компонент 1652 из материала дорожного покрытия и болт 1653. Датчик 1651 трех составляющих силы представляет собой колоннообразный пьезоэлектрический элемент, центральная ось которого ориентирована в направлении оси Z. Компонент 1652 из материала дорожного покрытия представляет собой, например, элемент с формой прямоугольного параллелепипеда, образованный из материала имитирующего дорожного покрытия или материала дорожного покрытия, который такой же, как в компоненте 63, образующем дорожное покрытие, и имеет одинаковую длину в направлении оси Х и направлении оси Y. Формы датчика 1651 трех составляющих силы и компонента 1652 из материала дорожного покрытия не ограничены данными формами. Например, датчик 1651 трех составляющих силы может иметь форму прямоугольного параллелепипеда, и компонент 1652 из материала дорожного покрытия может иметь колоннообразную форму.
[0184] В центре датчика 1651 трех составляющих силы образовано отверстие 1651b, проходящее в направлении оси Z. В центре компонента 1652 из материала дорожного покрытия образовано отверстие 1652b под болт, проходящее в направлении оси Z. Модуль 1650m измерения нагрузки объединен в одно целое и прикреплен к раме 1650а болтом 1653, вставленным через отверстие 1651b датчика 1651 трех компонентов силы и ввинченным в отверстие 1652b под болт, образованное в компоненте 1652 из материала дорожного покрытия. Верхние поверхности компонентов 1652 из материала дорожного покрытия расположены горизонтально на одинаковой высоте для формирования поверхности 1652а дорожного покрытия. Зона в направлении оси Х и направлении оси Y, в которой расположены модули 1650m измерения нагрузки, представляет собой зону измерения, охватываемую блоком 1650 с матрицей датчиков.
[0185] Датчик 1651 трех составляющих силы определяет изменения во времени нижеуказанных трех сил fR, fT и fL, которые действуют на поверхность 1652а дорожного покрытия в каждом модуле 1650m измерения нагрузки (то есть на протектор шины):
a) радиальной силы fR;
b) тангенциальной силы fT;
c) поперечной силы fL.
[0186] Можно определить распределение и изменение во времени силы, которую поверхность дорожного покрытия воспринимает со стороны протектора испытываемой шины Т (то есть силы, которая действует на протектор шины) посредством использования компонента 165 для измерения нагрузки.
[0187] Фиг.27 представляет собой блок-схему, показывающую схематическую конфигурацию системы 1а управления, предусмотренную в устройстве 1 для испытаний шин. Система 1а управления включает в себя управляющий компонент 72, выполненный с возможностью управления работой всего устройства, измерительный компонент 74, выполненный с возможностью выполнения различных измерений, и интерфейсный компонент 76, выполненный с возможностью ввода данных извне и вывода данных вовне.
[0188] Серводвигатели 141 соответствующих приводных компонентов 14, серводвигатель 32 устройства 30 для приложения крутящего момента, серводвигатель 451 компонента 45 для регулирования нагрузки, серводвигатель 461 компонента 46 для регулирования угла увода, серводвигатель 1655m устройства 1655 для обеспечения перемещения и серводвигатель 276b устройства 276 подачи гидравлического давления соединены с управляющим компонентом 72 посредством соответствующих сервоусилителей 141a, 32a, 451a, 461a, 1655a и 276a.
[0189] Управляющий компонент 72 и соответствующие сервоусилители 141a, 276a, 32a, 451a и 461a соединены друг с другом с возможностью передачи данных посредством оптических волокон, и обеспечивается возможность осуществления управления с обратной связью и высокоскоростной передачей данных между управляющим компонентом 72 и соответствующими сервоусилителями. Посредством этого обеспечивается возможность осуществления синхронизированного управления с высокой точностью (с высоким разрешением и высокой точностью по оси времени).
[0190] Кроме того, устройство 64с регулирования температуры соединено с управляющим компонентом 72.
[0191] Датчик 282 шести составляющих сил, предусмотренный в шпиндельном компоненте 28, датчики 1651 трех составляющих силы, предусмотренные в компоненте 165 для измерения нагрузки, и датчики 1656с близости, предусмотренные в компоненте 1656 для определения положения датчиков, соединены с измерительным компонентом 74 посредством соответствующих предварительных усилителей 282a, 1651a и 1656ca. Сигналы от датчика 282 шести составляющих сил, датчиков 1651 трех составляющих силы и датчиков 1656с близости усиливаются соответствующими предварительными усилителями 282a, 1651a и 1656ca и затем преобразуются в цифровые сигналы в измерительном компоненте 74, посредством чего генерируются данные измерений. Данные измерений вводятся в управляющий компонент 72. На фиг.27 показаны только один датчик 1651 трех составляющих силы, один предварительный усилитель 1651а, один датчик 1656с близости и один предварительный усилитель 1656са.
[0192] Элементы данных о фазах, полученные встроенными кодовыми датчиками RE угла поворота, предусмотренными в соответствующих серводвигателях 141, 32, 451, 461, 1655m и 276b, вводятся в управляющий компонент 72 посредством соответствующих сервоусилителей 141a, 32a, 451a, 461a, 1655a и 276a.
[0193] Интерфейсный компонент 76 включает в себя, например, один или более из пользовательского интерфейса, предназначенного для ввода данных пользователем и выдачи данных пользователю, сетевого интерфейса, предназначенного для соединения с различными типами сетей, такими как локальная сеть (LAN), и различных коммуникационных интерфейсов, таких как универсальная последовательная шина (USB) и универсальная интерфейсная шина (GPIB), предназначенных для соединения с внешними устройствами. Пользовательский интерфейс включает в себя, например, один/одно или более из различных типов переключателей режимов работы, индикаторов, различных типов устройств отображения, таких как жидкокристаллический дисплей (LCD), различных типов указывающих устройств, таких как мышь и сенсорная панель, и различных типов устройств ввода/вывода, таких как сенсорный экран, видеокамера, принтер, сканер, устройство звуковой сигнализации, динамик, микрофон и устройство для считывания с карты памяти/записи на карту памяти.
[0194] Управляющий компонент 72 может обеспечить перемещение каретки 20 с заданной скоростью посредством синхронного управления приведением в действие серводвигателей 141 соответствующих приводных компонентов 14 на основе задания данных по скорости, которые вводятся посредством интерфейсного компонента 76. В данном варианте осуществления все четыре приводных компонента 14 приводятся в действие синфазно (более точно, приводные компоненты 14LA и 14LB, расположенные слева, и приводные компоненты 14RA и 14RB, расположенные справа, приводятся во вращение с противоположными фазами [в противоположных направлениях вращения]).
[0195] Управляющий компонент 72 может обеспечить приложение заданной продольной силы к испытываемой шине Т посредством управления приведением в действие серводвигателя 32 устройства 30 для приложения крутящего момента на основе установочных данных по продольной силе (силе торможения или движущей силе), которая должна быть приложена к испытываемой шине Т, при этом указанные данные получены посредством интерфейсного компонента 76. Управляющий компонент 72 также может обеспечить приложение заданного крутящего момента к испытательному колесу W посредством управления устройством 30 для приложения крутящего момента на основе установочных данных по крутящему моменту (или установочных данных по ускорению) вместо установочных данных по продольной силе.
[0196] Управляющий компонент 72 может осуществлять управление приводным компонентом 14 для обеспечения перемещения каретки 20 с заданной скоростью движения (и одновременно для обеспечения вращения испытываемой шины Т с окружной скоростью, которая по существу такая же, как скорость движения) и управление устройством 30, предназначенным для приложения крутящего момента, для приложения продольной силы (или крутящего момента) к испытываемой шине Т синхронно на основе сигнала синхронизации.
[0197] Помимо базовых форм волн, таких как синусоидальная волна, синусоидальная полуволна, волна в виде последовательности пилообразных импульсов, волна в виде последовательности треугольных импульсов и волна в виде последовательности трапециевидных импульсов, формы колебаний продольной силы (или крутящего момента), которые измерены при дорожных испытаниях, формы колебаний продольной силы (или крутящего момента), которые получены посредством вычислений при моделировании, или другие произвольные синтезированные формы сигналов (например, формы сигналов, которые генерируются генератором функций или тому подобным), могут быть использованы в качестве форм колебаний крутящего момента, который подлежит генерированию посредством устройства 30 для приложения крутящего момента.
[0198] Аналогичным образом при регулировании скорости движения каретки 20 (или скорости вращения испытательного колеса W) помимо базовых форм колебаний могут быть использованы формы колебаний скоростей вращения колес, которые измерены при дорожных испытаниях, формы сигналов изменения скорости, которые получены посредством вычислений при моделировании, или другие произвольные синтезированные формы сигналов (например, формы сигналов, которые генерируются генератором функций или тому подобным)
[0199] Далее будет описана процедура изменения положения блока 1650 с матрицей датчиков в направлении оси Y посредством устройства 1655 для обеспечения перемещения. В исходном состоянии, показанном на фиг.21, блок 1650 с матрицей датчиков расположен в месте, в котором часть 1656ар подвижного рычага 1656а, предназначенная для взаимодействия с датчиками близости, расположена напротив воспринимающей поверхности 1656cf датчика 1656с близости, расположенного в центре. При выдаче команды на перемещение блока 1650 с матрицей датчиков влево (в положительном направлении оси Y) посредством, например, действия пользователя на сенсорном экране управляющий компонент 72 передает команду на вращение в направлении против часовой стрелки сервоусилителю 1655а для перемещения блока 1650 с матрицей датчиков в направлении оси Y. Сервоусилитель 1655а, который получил команду на вращение в направлении против часовой стрелки, подает ток возбуждения, который вызывает вращение серводвигателя 1655m в направлении против часовой стрелки. При приведении серводвигателя 1655m во вращение в направлении против часовой стрелки посредством тока возбуждения шариковый винт 1655ba вращается в направлении против часовой стрелки вместе с валом серводвигателя 1655m, и блок 1650 с матрицей датчиков перемещается в направлении оси Y вместе с гайкой 1655bb и подвижной рамой 1659.
[0200] Когда блок 1650 с матрицей датчиков перемещается в направлении оси Y, часть 1656ар подвижного рычага 1656а, предназначенная для взаимодействия с датчиками близости, перемещается от воспринимающей поверхности 16556cf датчика 1656с близости, расположенного в центре, и датчик 1656с близости, расположенный в центре, становится в меньшей степени реагирующим на приближение. С течением времени часть 1656ар подвижного рычага 1656а, предназначенная для взаимодействия с датчиками близости, достигает положения напротив воспринимающей поверхности 1656cf датчика 1656с близости, расположенного слева (со стороны положительного направления оси Y). В этот момент датчик 1656с близости, расположенный слева, обнаруживает приближение и выдает сигнал приближения, указывающий на обнаружение приближения. Измерительный компонент 74, который получил сигнал приближения посредством предварительного усилителя 1656ca, уведомляет управляющий компонент 72 о том, что блок 1650 с матрицей датчиков достиг фиксированного положения слева. Управляющий компонент 72, который получил уведомление от измерительного компонента 74, передает команду сервоусилитель 1655а на прекращение приведения в действие. Сервоусилитель 1655а, который получил команду на прекращение приведения в действие, перестает подавать ток возбуждения серводвигателю 1655m. Посредством этого вращения вала серводвигателя 1655m и шарикового винта 1655ba прекращаются, и гайка 1655bb и блок 1650 с матрицей датчиков также останавливаются, и смещение блока 1650 с матрицей датчиков завершается.
[0201] При наличии устройства 1655 для обеспечения перемещения становится возможным укорачивание длины Ly (Фиг. 20) зоны измерения, охватываемой блоком 1650 с матрицей датчиков, в направлении оси Y для уменьшения числа модулей 1650m измерения нагрузки, необходимых для определения распределения нагрузки, и, следовательно, становится возможным сокращение затрат, необходимых для изготовления и эксплуатации/технического обслуживания блока 1650 с матрицей датчиков.
[0202] Далее будет описан способ получения распределения нагрузки, действующей на протектор шины, посредством использования компонента 165 для измерения нагрузки. Фиг.23 представляет собой схему последовательности операций, показывающую процедуру выполнения способа для получения распределения нагрузки, действующей на протектор шины.
[0203] При включении питания устройства 1 для испытаний шин управляющий компонент 72 сначала выполняет процесс S1 инициализации. Как показано на фиг.2, в исходном состоянии каретка 20 устанавливается в исходном положении PX0 (исходном положении при движении), заданном как положение рядом с концом интервала ее возможных перемещений в отрицательном направлении оси Х. Скользящая рама 44 (фиг.4) устанавливается в исходном положении PZ0, заданном, например, как положение рядом с верхним концом интервала ее возможных перемещений. В исходном положении PZ0 испытательное колесо W поднято с поверхности 63а дорожного покрытия, и существует возможность присоединения и отсоединения испытательного колеса W и регулирования выставления испытательного колеса W. Угол увода и угол развала также доводятся до заданных значений соответственно посредством компонента 46 для регулирования угла увода и компонента 47 для регулирования угла развала.
[0204] В состоянии, в котором испытательное колесо W поднято с поверхности 63а дорожного покрытия, приводится в действие серводвигатель 32 устройства 30 для приложения крутящего момента, и угловое положение θW испытательного изменяется на исходное угловое положение θW0 для завершения процесса S1 инициализации. Угловое положение θH устройства 30 для приложения крутящего момента (то есть корпуса 31) зависит от положения PX каретки 20 при перемещении. В исходном состоянии устройство 30 для приложения крутящего момента всегда расположено в исходном угловом положении θH0.
[0205] После завершения процесса S1 инициализации при подаче команды на начало испытания посредством, например, действия пользователя на сенсорном экране (S2: ДА) число серий k измерений, представляющее собой счетчик, задается равным 1 (S3), и обеспечиваются опускание испытательного колеса W и его ввод в контакт с поверхностью 63а дорожного покрытия, и компонент 45 для регулирования нагрузки обеспечивает приложение заданной нагрузки к испытательному колесу W (S4).
[0206] После этого выполняется первая серия S5 измерений. В серии S5 измерений приводятся в действие серводвигатели 141 соответствующих приводных компонентов 14, и каретка 20 перемещается с заданной скоростью движения, и испытательное колесо W вращается с окружной скоростью, которая по существу такая же, как скорость движения каретки 20. Серводвигатель 32 устройства 30 для приложения крутящего момента также приводится в действие, и обеспечивается приложение заданного крутящего момента к испытательному колесу W.
[0207] При выполнении серии S5 измерений силы, действующие на поверхность 1652а дорожного покрытия и испытательное колесо W, измеряются соответственно датчиком 1651 трех составляющих силы, предусмотренном в компоненте 165 для измерения нагрузки, и датчиком 282 шести составляющих сил, предусмотренном в шпиндельном компоненте 28, с заданными интервалами времени (например, с интервалами, составляющими 5 мс). Интервалы времени измерений, выполняемых датчиком 1651 трех составляющих силы и датчиком 282 шести составляющих сил, заданы соответствующим образом в соответствии с условиями испытаний (например, скоростью движения каретки 20 и требуемой точностью испытаний).
[0208] При выполнении серии S5 измерений положение PX каретки 20 при перемещении и угловое положение θW испытательного колеса определяются с заданными интервалами времени (например, с интервалами времени, такими же, как используемые для измерений датчиком 1651 трех составляющих силы). Положение PX каретки 20 при перемещении определяют из результатов измерений, полученных встроенными кодовыми датчиками RE угла поворота (Фиг. 10), предусмотренными в серводвигателях 141 приводных компонентов 14, передаточных чисел редукторов 142 и расчетных диаметров ведущих шкивов 52 ременных передаточных механизмов 50. В описании представленного варианта осуществления положение PX каретки 20 при перемещении определено как положение оси Ay вращения испытательного колеса W в направлении движения каретки 20 (в направлении оси Х).
[0209] Угловое положение θW испытательного колеса W рассчитывается на основе результатов измерений, полученных кодовым датчиком 39 угла поворота, предусмотренным в устройстве 30 для приложения крутящего момента, и встроенным кодовым датчиком RE угла поворота, предусмотренным в серводвигателе 32. В частности, угловое положение θW испытательного колеса W рассчитывается посредством прибавления произведения угла, определяемого угловым положением θM вала 321 серводвигателя 32 и определенного кодовым датчиком RE угла поворота, предусмотренным в серводвигателе 32 (при этом угол, соответствующий исходному угловому положению θM0 в исходном состоянии, составляет 0 [рад]), и передаточного отношения редуктора 33 (то есть углового положения θS вала 34 относительно корпуса 31) к углу, определяемому угловым положением θH корпуса 31 устройства 30 для приложения крутящего момента и определенному кодовым датчиком 39 угла поворота.
[0210] Следует отметить, что может быть предусмотрено средство измерения, такое как кодовый датчик угла поворота, предназначенный для определения углового положения θT «на выходе» устройства 30 для приложения крутящего момента (например, углового положения шпинделя 280, вала 261 или вала 263), для определения углового положения θW испытательного колеса W непосредственно с помощью данного средства измерения.
[0211] Результаты измерений, полученные датчиком 1651 трех составляющих силы и датчиком 282 шести составляющих сил, увязываются с результатами измерений, полученными встроенными кодовыми датчиками RE угла поворота, предусмотренными в серводвигателях 141 приводных компонентов 14 (то есть с положением PX каретки 20 при перемещении), и результатом определения углового положения θW испытательного колеса W, которые получены в один и тот же момент времени, и сохраняются в запоминающем устройстве 721 управляющего компонента 72 (или в запоминающем средстве, к которому управляющий компонент 72 может иметь доступ, таком как сервер 77, соединенный с управляющим компонентом 72, например, посредством локальной сети (LAN)). Что касается результата измерений, полученного датчиком 1651 трех составляющих силы, то могут быть сохранены в памяти только результат, полученный в промежутке времени, в котором испытательное колесо W проходит над блоком 1650 с матрицей датчиков, и результаты, полученные в заданных промежутках времени до и после вышеупомянутого промежутка времени. При данной конфигурации можно уменьшить количество данных, подлежащих сохранению.
[0212] Когда каретка 20 достигает «тупикового» конца зоны перемещения и останавливается, устройство 45 для регулирования нагрузки обеспечивает подъем испытательного колеса W до высоты, при которой испытательное колесо W поднято с поверхности 63а дорожного покрытия (например, такой же высоты, как в исходном состоянии) (S6). После этого приводные компоненты 14 приводятся в действие для перемещения каретки 20 в исходное положение PX0 (S7).
[0213] Вышеописанные процессы S4-S9 повторяются до тех пор, пока число серий k измерений не достигнет заданного числа n (S8). Если число серий k измерений еще не достигло заданного числа n (S8: НЕТ), серводвигатель 32 устройства 30 для приложения крутящего момента приводится в действие для перемещения испытательного колеса W из углового положения θW в угловое положение θW0+k*ΔθW (S9), и значение счетчика k увеличивается (S12). То есть угловое положение θW испытательного колеса W при исходном положении PX0 изменяется на величину угла/угловую ширину ΔθW каждый раз, когда число серий k измерений увеличивается на единицу.
[0214] Угловая ширина ΔθW задана, например, равной величине, которая равна или меньше центрального угла θC1 испытательного колеса W, который соответствует длине Lx (Фиг. 19) зоны измерения, охватываемой блоком 1650 с матрицей датчиков, в направлении оси Х (то есть углу θC1 поворота испытательного колеса W, когда испытательное колесо W катится на расстоянии Lx). Например, угловая ширина ΔθW задана равной величине, которая такая же, как центральный угол θC2, или незначительно меньше центрального угла θC2 испытательного колеса W, который соответствует интервалу Δ (Фиг. 19) при размещении модулей 1650m измерения нагрузки.
[0215] Кроме того, угловая ширина ΔθW может быть, например, задана равной величине, полученной делением 2π на заданное число n. В этом случае вся окружная периферия испытательного колеса W измеряется без зазора посредством n серий измерений.
[0216] После завершения выполнения заданных n серий измерений (S8: ДА) выполняется расчет S10 профиля нагрузки.
[0217] Фиг.24 представляет собой схему последовательности операций, показывающую процедуру расчета S10 профиля нагрузки. Расчет S10 профиля нагрузки представляет собой процесс вычисления данных профиля нагрузки на основе результатов измерений, полученных посредством n серий S5 измерений.
[0218] Данные профиля нагрузки представляют собой данные, в которых значения сил трех типов, действующих на шину (то есть радиальной силы fR, тангенциальной силы fT и поперечной силы fL) поставлены в соответствие координатам в плоскости на поверхности дорожного покрытия.
[0219] При расчете S10 профиля нагрузки сначала выполняется расчет координат соответствующих модулей 1650m измерения нагрузки (S101). В данном варианте осуществления координата точки в центре верхней поверхности модуля 1650m измерения нагрузки задана как координата модуля 1650m измерения нагрузки.
[0220] Фиг.25 представляет собой схематическое изображение, показывающее взаимное расположение модулей 1650m измерения нагрузки и оси Ay вращения испытательного колеса W. Как описано выше, в данном варианте осуществления 150 модулей измерения нагрузки расположены в 5 рядах в направлении оси Х и 30 рядах в направлении оси Y. В нижеприведенном описании номер ряда модуля 1650m измерения нагрузки в направлении оси Х будет обозначен p, номер ряда модуля 1650m измерения нагрузки в направлении оси Y будет обозначен q, и положение модуля 1650m измерения нагрузки будет обозначено парой положительных целых чисел [p, q] (упоминаемой в дальнейшем как адрес [p, q]).
[0221] При расчете S10 профиля нагрузки используется система координат (x, y). Система координат (x, y) представляет собой двумерную систему ортогональных координат, параллельную системе координат (X, Y), при этом началом системы координат (x, y) является центр верхней поверхности модуля 1650m измерения нагрузки, расположенного по адресу [3, 1]. То есть плоскость xy представляет собой плоскость, в которой расположена поверхность 63а и 1652а дорожного покрытия в компоненте 60 с поверхностью дорожного покрытия. В данном варианте осуществления начало системы координат (x, y) (то есть положение модуля 1650m измерения нагрузки, имеющего адрес [3, 1]) задано как положение блока 1650 с матрицей датчиков. В нижеприведенном описании координата, началом которой является неподвижная точка, упоминается как абсолютная координата, и координата, началом которой является подвижная точка, упоминается как относительная координата. При расчете S10 профиля нагрузки вычисляются абсолютные координаты соответствующих модулей 1650m измерения нагрузки.
[0222] В данном варианте осуществления модули 1650m измерения нагрузки расположены с постоянными интервалами Δ в направлении оси x и в направлении оси y. Следовательно, координаты x и y адреса [p, q] рассчитываются в соответствии со следующими формулами.
x=(p - 3) * Δ
y=(q - 1) * Δ
[0223] После этого рассчитывается координата x оси Ay вращения испытательного колеса W (упоминаемая в дальнейшем как «координата xAy») (S102). Координата xAy рассчитывается в соответствии со следующей формулой.
xAy=PX - SX
где
PX: координата X положения Px испытательного колеса W при перемещении (координата оси Ay вращения);
SX: координата X начала координат (x, y).
[0224] То есть в процессе S102 координаты оси Ay вращения испытательного колеса W преобразуются из системы координат XY в систему координат xy.
[0225] После этого определяются относительные положения (рассчитываются относительные координаты) модулей 1650m измерения нагрузки по отношению к положению Px испытательного колеса W (оси Ay вращения) при перемещении (S103). Относительные координаты (xr, yr) модулей 1650m измерения нагрузки рассчитываются в соответствии с нижеприведенными формулами. В данном варианте осуществления получают данные профиля нагрузки, относящиеся к относительной координате по отношению к оси Ay вращения.
xr=x - xAy
yr=y
[0226] Элементы данных профиля нагрузки по трем типам сил fR, fT и fL рассчитываются затем посредством усреднения всех результатов измерений (то есть радиальных сил fR, тангенциальных сил fT и поперечных сил fL, измеренных соответствующими модулями 1650m измерения нагрузки) для каждой относительной координаты (xr, yr) (S104). В процессе S104 элементы данных профиля нагрузки могут быть рассчитаны как приближенные криволинейные поверхности, которые могут быть получены посредством регрессионного анализа (например, криволинейная поверхность, соответствующая, например, методу наименьших квадратов).
[0227] В процессе S104 элементы данных профиля нагрузки могут быть рассчитаны с учетом углового положения θW испытательного колеса W (то есть для каждого углового положения θW). В данном случае элементы данных профиля нагрузки могут быть рассчитаны с учетом также симметричности рисунка протектора испытательной шины Т относительно оси Ay вращения. В частности, элементы данных профиля нагрузки могут быть рассчитаны для всех угловых положений θW, которые являются одинаковыми по фазе цикла для рисунка протектора в направлении вдоль окружности.
[0228] В данном варианте осуществления посредством n серий измерений выполняются измерения только для одного оборота испытательного колеса W. Однако число серий измерений может быть увеличено для выполнения измерений для множества оборотов. Поскольку в данном варианте осуществления множество серий измерений выполняются при изменении углового положения θW испытательного колеса W при исходном положении PX0 посредством центрального угла θC2 испытательного колеса W, который соответствует интервалу Δ, с которым размещены модули 1650m измерения нагрузки, разрешение для данных профиля нагрузки в направлении оси x почти соответствует величине интервала Δ, с которым размещены модули 1650m измерения нагрузки. Посредством неоднократного выполнения серии измерений при изменении углового положения θW на дополнительный меньший угол (например, равный 1/10 от центрального угла θC2) существенное разрешение в направлении оси х может быть сделано меньшим, чем интервал Δ, с которым размещены модули 1650m измерения нагрузки. Например, если серии измерений повторяются при изменении углового положения θW на 1/m центрального угла θC2 (при этом m представляет собой натуральное число), существенное разрешение в направлении оси x может быть доведено до почти Δ/m.
[0229] В данном варианте осуществления длина Lx (Фиг. 19) зоны измерения, охватываемой блоком 1650 с матрицей датчиков, определяемая в направлении оси Х, меньше длины протектора шины в направлении оси Х. Следовательно, распределение нагрузки не может быть получено для всего протектора шины при обеспечении перекатывания испытательного колеса W по блоку 1650 с матрицей датчиков только один раз.
[0230] Следовательно, в данном варианте осуществления выбран метод определения распределения нагрузки по протектору шины при нескольких отдельных измерениях при смещении углового положения θW испытательного колеса W во время качения испытательного колеса W по блоку 1650 с матрицей датчиков. Посредством данного метода становятся возможными уменьшение длины зоны измерения, охватываемой блоком 1650 с матрицей датчиков, в направлении оси Х и уменьшение числа модулей 1650m измерения нагрузки, необходимых для определения распределения нагрузки, и поэтому обеспечивается возможность снижения затрат, необходимых для изготовления и эксплуатации/технического обслуживания блока 1650 с матрицей датчиков.
[0231] Посредством неоднократного выполнения серии измерений при одновременном изменения положения блока 1650 с матрицей датчиков с заданным интервалом по оси y посредством устройства 1655 для обеспечения перемещения существенное низкое разрешение в направлении оси y может быть сделано более высоким. В этом случае электродвигатель, обеспечивающий возможность регулирования положения (например, серводвигатель или шаговый двигатель), используется в качестве серводвигателя 1655m устройства 1655 для обеспечения перемещения. Например, посредством неоднократного выполнения серии измерений при изменении положения блока 1650 с матрицей датчиков в направлении оси y на 1 мм существенное разрешение в направлении оси y может быть доведено до почти 1 мм.
[0232] После этого изображения профиля нагрузки, созданные на основе рассчитанных данных профиля нагрузки, отображаются на устройстве отображения, предусмотренном в интерфейсном компоненте 76, посредством чего происходит визуализация распределения нагрузки, действующей на поверхность протектора шины (S11). Фиг.26 показывает примеры отображенных изображений профиля нагрузки. Фиг.26(а) представляет собой изображение профиля нагрузки, создаваемой тангенциальными силами fT, фиг.26(b) представляет собой изображение профиля нагрузки, создаваемой поперечными силами fL, и фиг.26(с) представляет собой изображение профиля нагрузки, создаваемой радиальными силами fR. Изображения профилей нагрузок, показанные на фиг.26, представляют собой изображения, созданные посредством преобразования значений сил в соответствующих местах (xr, yr) в яркость. Вид изображения профиля нагрузки не ограничена видом по данному варианту осуществления и может представлять собой другой вид, такой как у трехмерного изображения, полученного компьютерной графикой (CG).
[0233] Вышеизложенное представляет собой описание вариантов осуществления настоящего изобретения. Варианты осуществления настоящего изобретения не ограничены вышеописанными, и возможны различные модификации. Например, соответствующие комбинации конфигураций вариантов осуществления и тому подобного, явным образом проиллюстрированных в данном описании, и/или конфигурации, очевидные для среднего специалиста в данной области техники из описания в данном описании, также включены в варианты осуществления данной заявки.
[0234] В вышеописанном варианте осуществления устройство 1 для испытаний шин включает в себя два ременных передаточных механизма 50. Однако устройство 1 для испытаний шин может включать в себя один ременный передаточный механизм 50 или три или более ременных передаточных механизмов 50.
[0235] В вышеописанном варианте осуществления ременные передаточные механизмы 50 приводятся в действие посредством мощности, генерированной двумя приводными компонентами 14. Однако ременные передаточные механизмы 50 могут быть выполнены с возможностью приведения их в действие посредством одного приводного компонента 14 или трех или более приводных компонентов 14.
[0236] В вышеописанном варианте осуществления зубчатый ремень и зубчатые шкивы используются в каждом из ременных передаточных механизмов 50, 23, 24. Однако плоский ремень или клиновидный ремень может быть использован вместо зубчатого ремня в одном или более ременных передаточных механизмах. Другой тип передаточного механизма с намотанным элементом, такой как цепной передаточный механизм или проволочный передаточный механизм, и другой тип механизма передачи мощности, такой как шариковый винтовой механизм, зубчатая передача или гидравлический механизм, могут быть использованы вместе ременного передаточного механизма.
[0237] В вышеописанном варианте осуществления мощность для приведения в движение каретки 20 и мощность для приведения в движение испытательного колеса W (шпинделя 280) подаются от общих приводных компонентов 14 и передаются посредством общих ременных передаточных механизмов 50. Однако настоящее изобретение не ограничено данной конфигурацией. Например, мощность для приведения в движение каретки 20 и мощность для приведения в движение испытательного колеса W могут генерироваться отдельными приводными компонентами и могут передаваться с помощью отдельных средств передачи мощности (например, отдельных ременных передаточных механизмов). В этом случае должно быть обеспечено синхронное управление приведением в действие приводного компонента, предназначенного для приведения в движение каретки, и приведением в действие приводного компонента, предназначенного для приведения в движение испытательного колеса, для синхронизации скорости движения каретки 20 и окружной скорости испытательного колеса W.
[0238] В вышеописанном варианте осуществления простая система привода и система управления реализованы за счет того, что сделаны «общими»/совместно используются часть (приводные компоненты 14 и приводные ременные передаточные механизмы 50) механизма для приведения в движение каретки 20 (средства приведения в движение каретки) и часть (приводные компоненты 14 и приводные ременные передаточные механизмы 50) механизма для приведения в движение испытательного колеса W (средства приведения в движение испытательного колеса). Возможность совместного использования средства приведения в движение каретки и средства приведения в движение испытательного колеса (в особенности совместного использования приводных компонентов 14) обеспечивается благодаря уменьшению нагрузки, которую несут приводные компоненты 14, за счет включения в конструкцию устройства 30 для приложения крутящего момента с целью изоляции источника мощности, предназначенного для регулирования скорости испытательного колеса W, от источника мощности, предназначенного для регулирования крутящего момента на испытательном колесе W.
[0239] В вышеописанном варианте осуществления выбрана конфигурация, в которой приводные компоненты 14RA и 14RB, расположенные справа, функционируют как в качестве средства приведения в движение каретки, так и в качестве средства сообщения вращательного движения, и приводные компоненты 14LA и 14LB, расположенные слева, функционируют в качестве средства приведения в движение каретки. Однако настоящее изобретение не ограничено данной конфигурацией. Например, может быть выбрана конфигурация, в которой приводные компоненты 14LA и 14LB, расположенные слева, служат как в качестве средства приведения в движение каретки, так и в качестве средства сообщения вращательного движения, и приводные компоненты 14RA и 14RB, расположенные справа, функционируют в качестве средства приведения в движение каретки. Кроме того, как приводные компоненты 14LA и 14LB, расположенные слева, так и приводные компоненты 14RA и 14RB, расположенные справа, могут служить в качестве средств приведения в движение каретки и средств сообщения вращательного движения. Данная конфигурация реализуется, например, посредством соединения двух валов 223В правого и левого ведомых компонентов 22R и 22L (другими словами, посредством замены двух валов 223В правого и левого ведомых компонентов 22R и 22L одним длинным валом 223В, соединяющим правый и левый ведомые компоненты 22R и 22L).
[0240] В вышеописанном третьем варианте обеспечивается возможность определения профилей нагружения протектора шины, имеющего длину, превышающую длину Lx зоны измерения, охватываемой блоком 1650 с матрицей датчиков, в направлении оси Х, посредством изменения углового положения θW испытательного колеса W в исходном положении PZ0 для каждой серии измерений. Тем не менее становится возможным определение профилей нагружения протектора шины, имеющего длину, превышающую длину Lx, без изменения углового положения θW испытательного колеса W в исходном положении PZ0 для каждой серии измерений посредством обеспечения наличия средства, которое делает возможным изменение положения блока 1650 с матрицей датчиков в направлении оси Х. Средство, которое обеспечивает возможность изменения положения блока 1650 с матрицей датчиков в направлении оси Х, может быть, например, образовано посредством электродвигателя, позволяющего регулировать положения, и механизма с ходовым винтом (например, шарикового винтового механизма), как в случае устройства 1655 для обеспечения перемещения.
[0241] В вышеописанном варианте осуществления в направляющем механизме 13 направляющего компонента 10 стержень 134а и тому подобные элементы опираются на два однорядных подшипника 137а или тому подобное. Однако настоящее изобретение не ограничено данной конфигурацией. Например, стержень может опираться на один или более двухрядных или однорядных подшипников.
[0242] В вышеописанном варианте осуществления рельс, подвергнутый термообработке, используется в направляющем механизме 13 направляющего компонента 10. Однако настоящее изобретение не ограничено данной конфигурацией. Например, может использоваться обычный рельс (JIS E 1101:2001) или легкий рельс (JIS E 1103:1993). Кроме того, рельсовая направляющая не ограничена рельсовой направляющей с плоской нижней поверхностью, и может использоваться рельсовая направляющая, имеющая другую форму, такая как рельс с двумя головками, рельс с закругленной головкой или мостовидный рельс.
[0243] В вышеописанном варианте осуществления серводвигатель 141 (серводвигатель переменного тока) используется в качестве приводного компонента 14. Однако настоящее изобретение не ограничено данной конфигурацией. Вместо серводвигателя переменного тока может использоваться электродвигатель другого типа, посредством которого можно обеспечить регулирование скорости или регулирование положения (например, серводвигатель постоянного тока или так называемый инверторный электродвигатель, в котором цепь инвертора объединена с электродвигателем переменного тока или бесщеточным электродвигателем).
[0244] В вышеописанном варианте осуществления серводвигатели 32, 451 и 461, которые представляют собой серводвигатели переменного тока, используются соответственно в устройстве 30 для приложения крутящего момента, компоненте 45 для регулирования нагрузки и компоненте 46 для регулирования угла увода. Однако настоящее изобретение не ограничено данной конфигурацией. Вместо серводвигателя переменного тока может использоваться электродвигатель другого типа, посредством которого можно регулировать положение (например, серводвигатель постоянного тока или шаговый электродвигатель).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ШИН | 2021 |
|
RU2836068C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ШИН | 2020 |
|
RU2819075C2 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЙ КОЛЕС | 2021 |
|
RU2824533C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ДИНАМИЧЕСКОЙ НАГРУЗКИ | 2020 |
|
RU2814966C1 |
| ИСПЫТАТЕЛЬНОЕ УСТРОЙСТВО, СПОСОБ НАСТРОЙКИ ИСПЫТАТЕЛЬНОГО ПРОЦЕССА И СПОСОБ ИСПЫТАНИЯ РУЛЕВОГО МЕХАНИЗМА | 2019 |
|
RU2771014C1 |
| СПОСОБ ИСПЫТАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2063492C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ОДНООСНОГО КОЛЕСНОГО ДВИЖИТЕЛЯ С КРУПНОГАБАРИТНЫМИ ПНЕВМАТИЧЕСКИМИ ШИНАМИ | 2020 |
|
RU2744276C1 |
| ВЫСОКОЧАСТОТНАЯ УСТАЛОСТНАЯ МАШИНА ДЛЯ ИСПЫТАНИЙ НА ДИНАМИЧЕСКУЮ НАГРУЗКУ ДЛЯ РЕЛЬСОВЫХ КРЕПЕЖНЫХ ПРУЖИННЫХ ПРУТКОВ | 2019 |
|
RU2747792C2 |
| Устройство для испытания дорожного покрытия на износ ошипованными шинами, секторный элемент кольца дорожного покрытия для этого устройства и способ испытания дорожного покрытия на износ ошипованными шинами на этом устройстве | 2019 |
|
RU2706387C1 |
| СИСТЕМА ДЛЯ ИСПОЛЬЗОВАНИЯ СОВМЕСТНО С ПРЕССОМ ДЛЯ ШТАМПОВКИ ИЗДЕЛИЯ | 1990 |
|
RU2030239C1 |
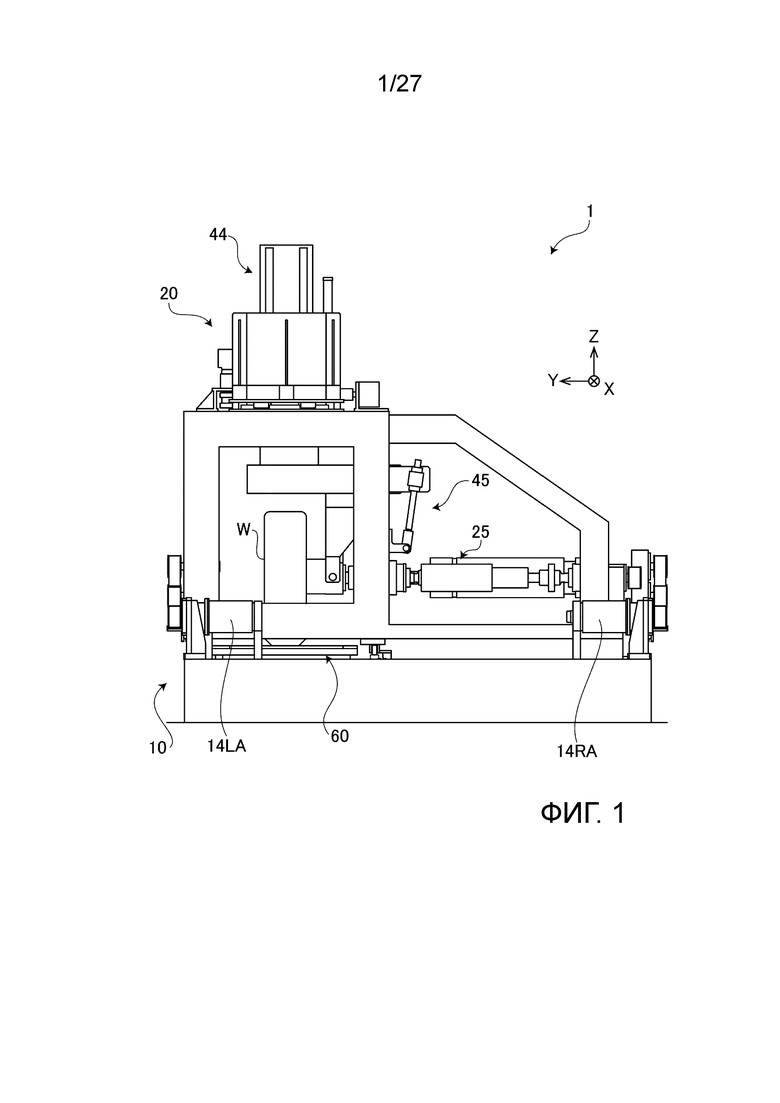
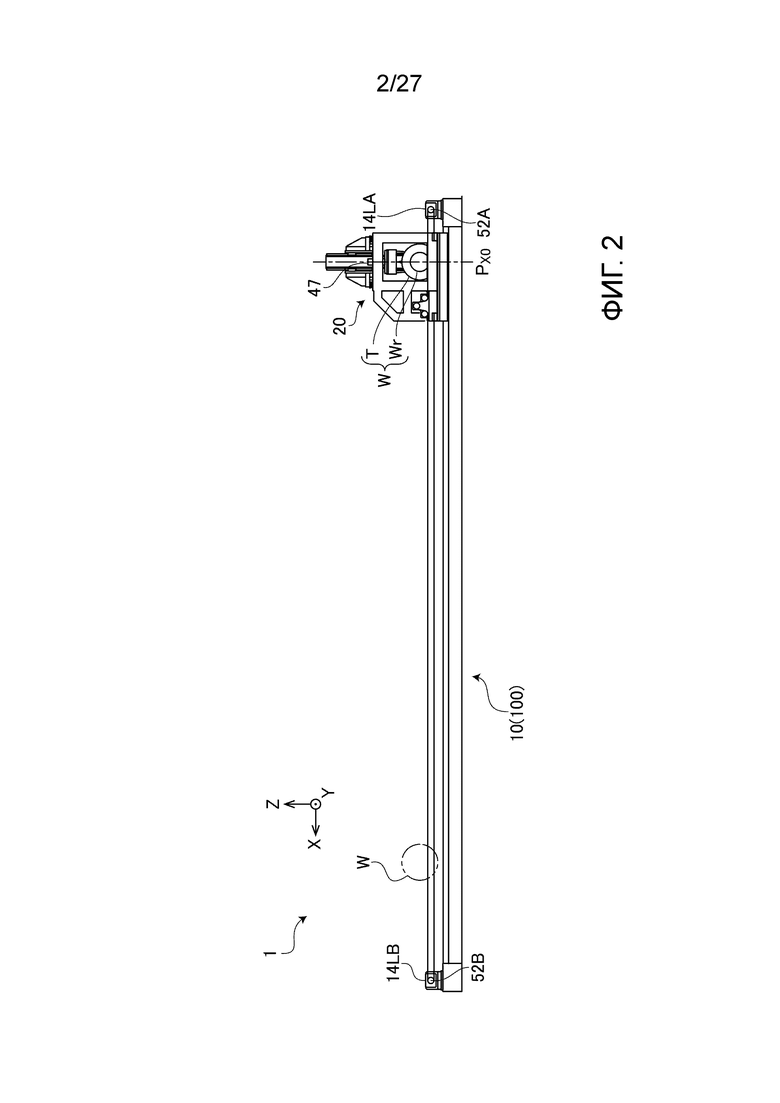



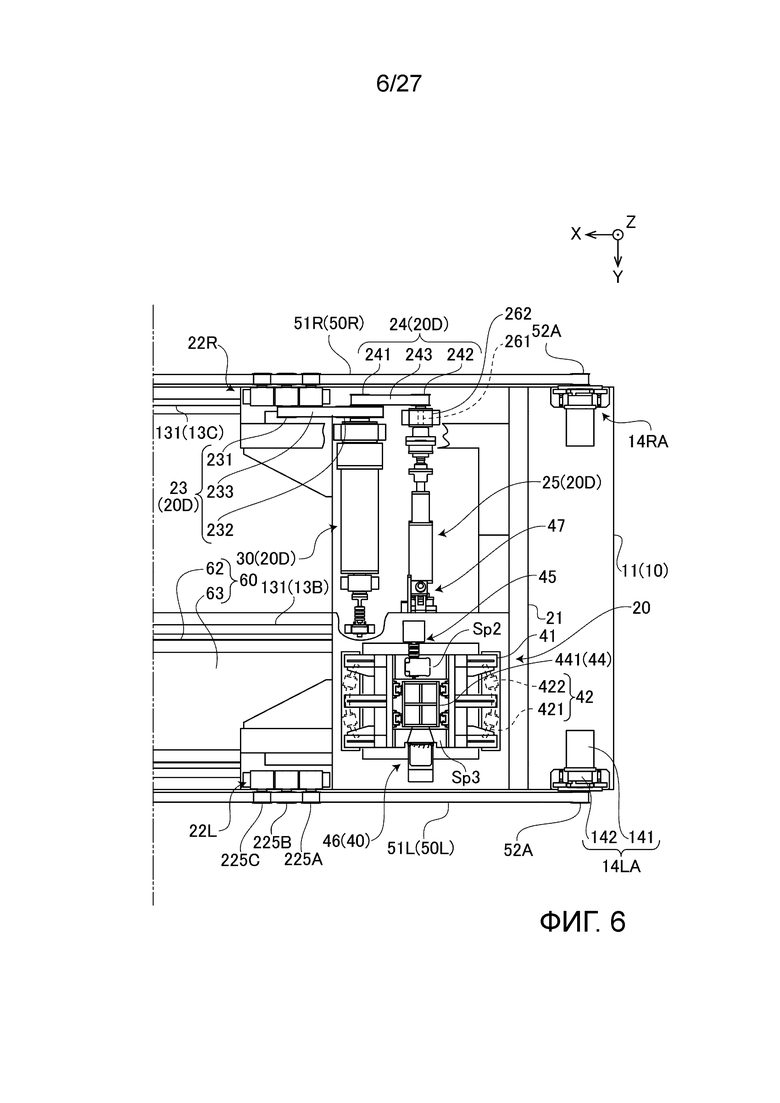



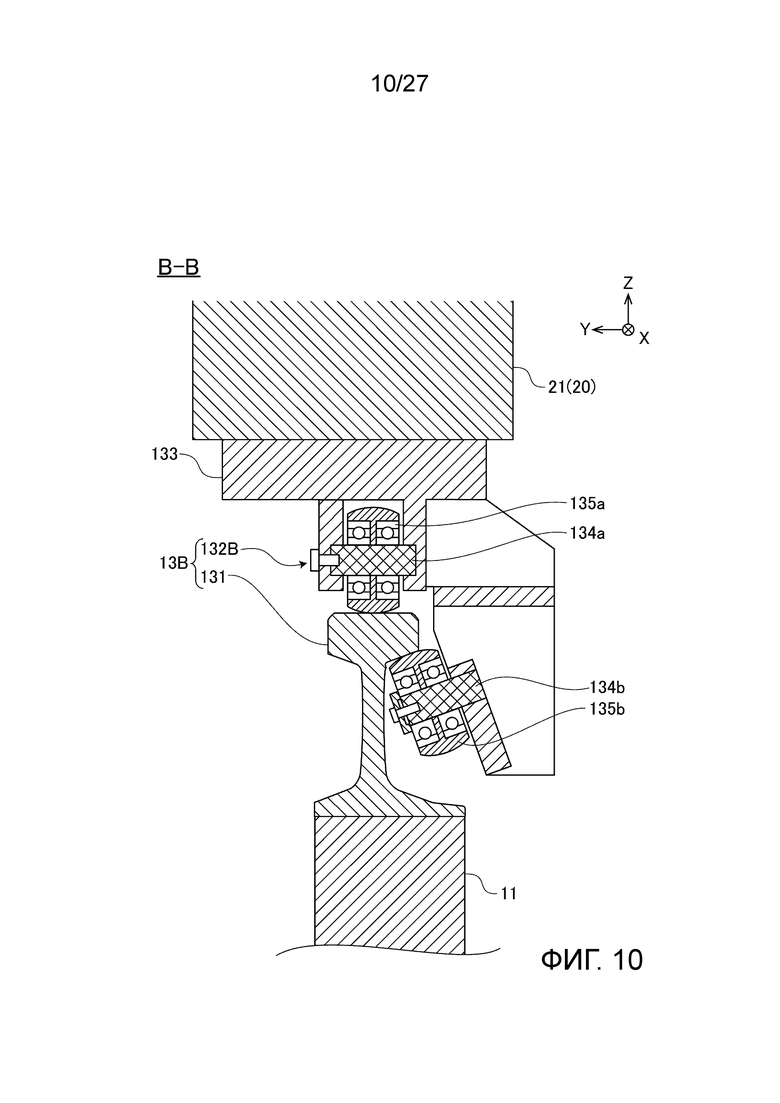

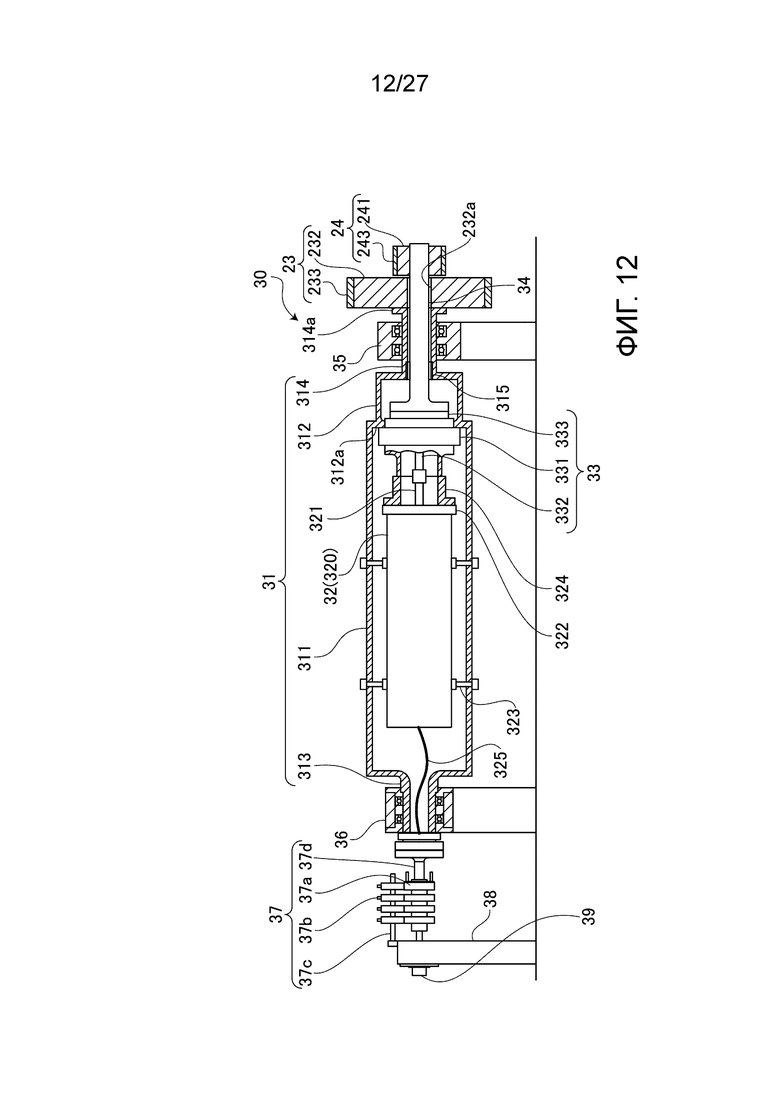

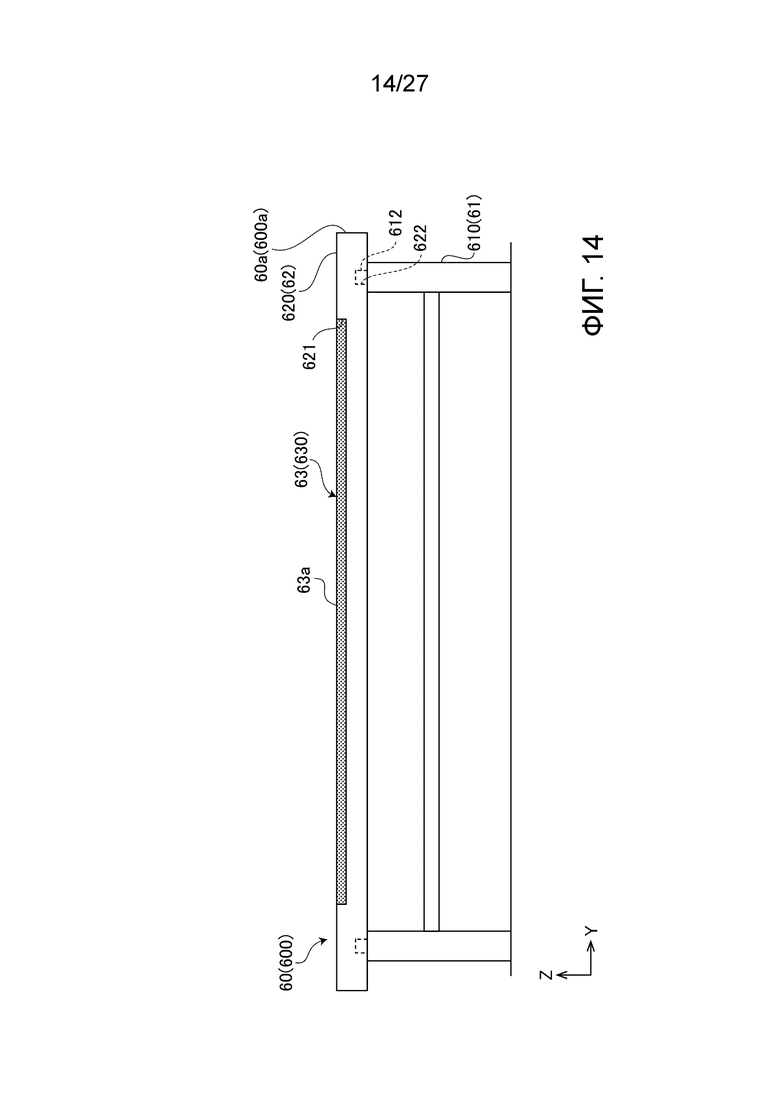

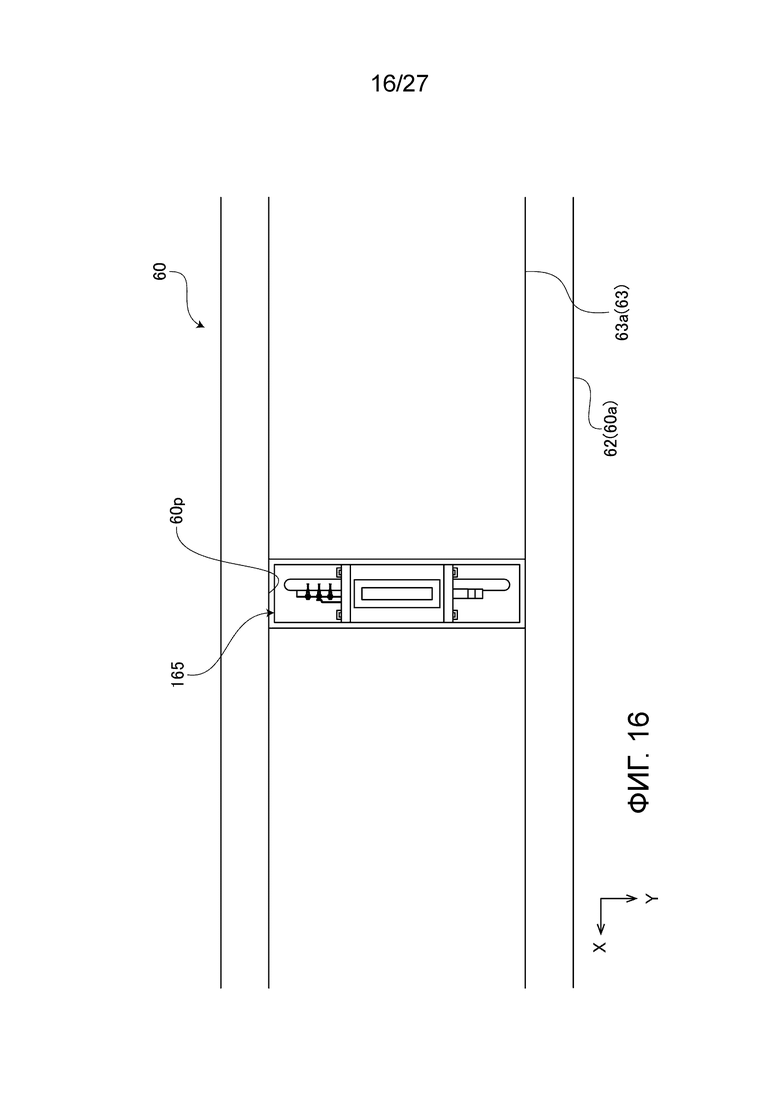

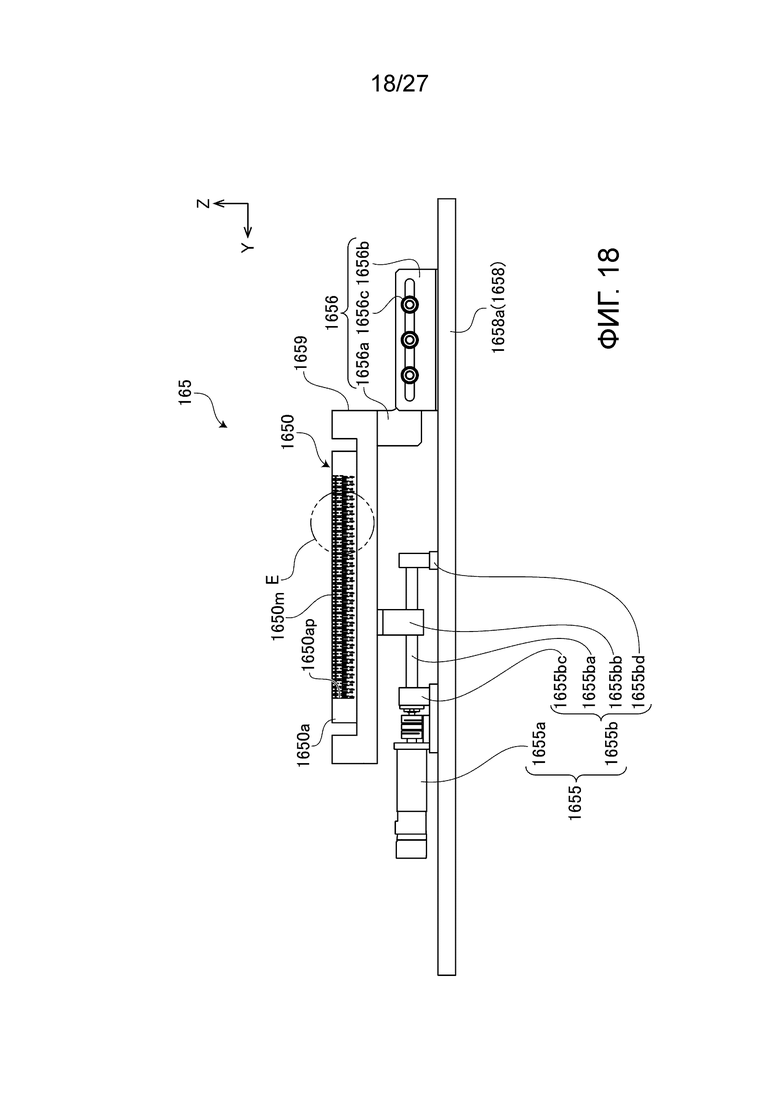



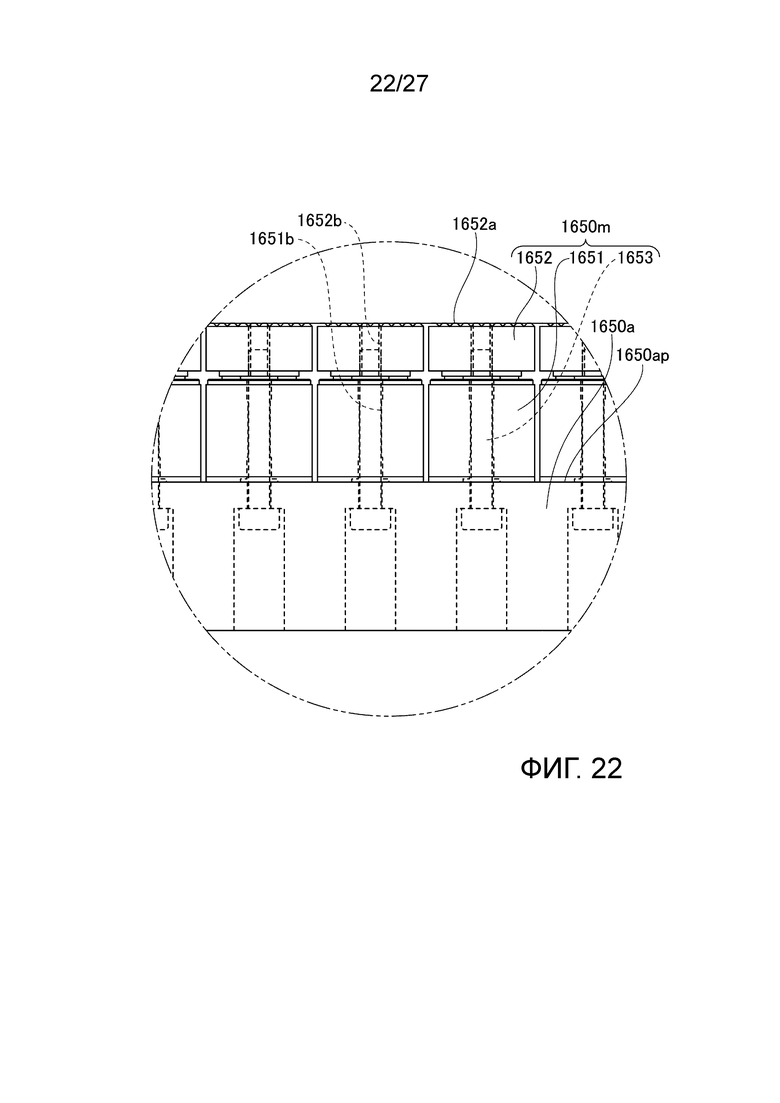
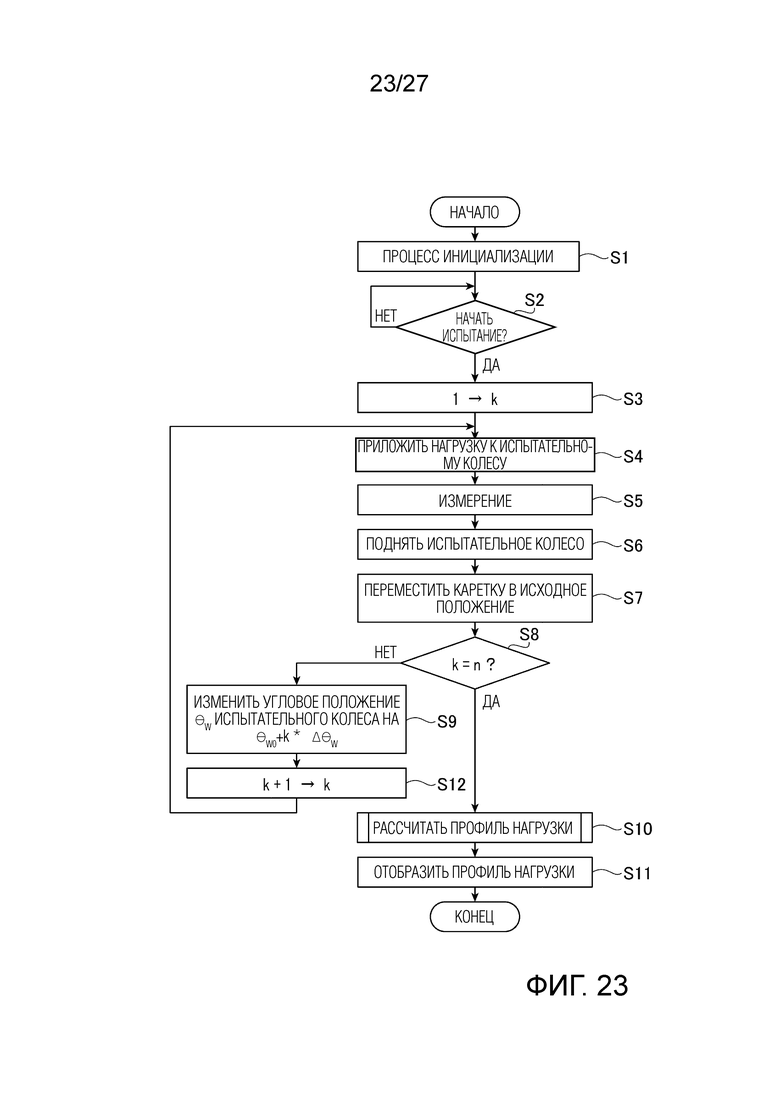

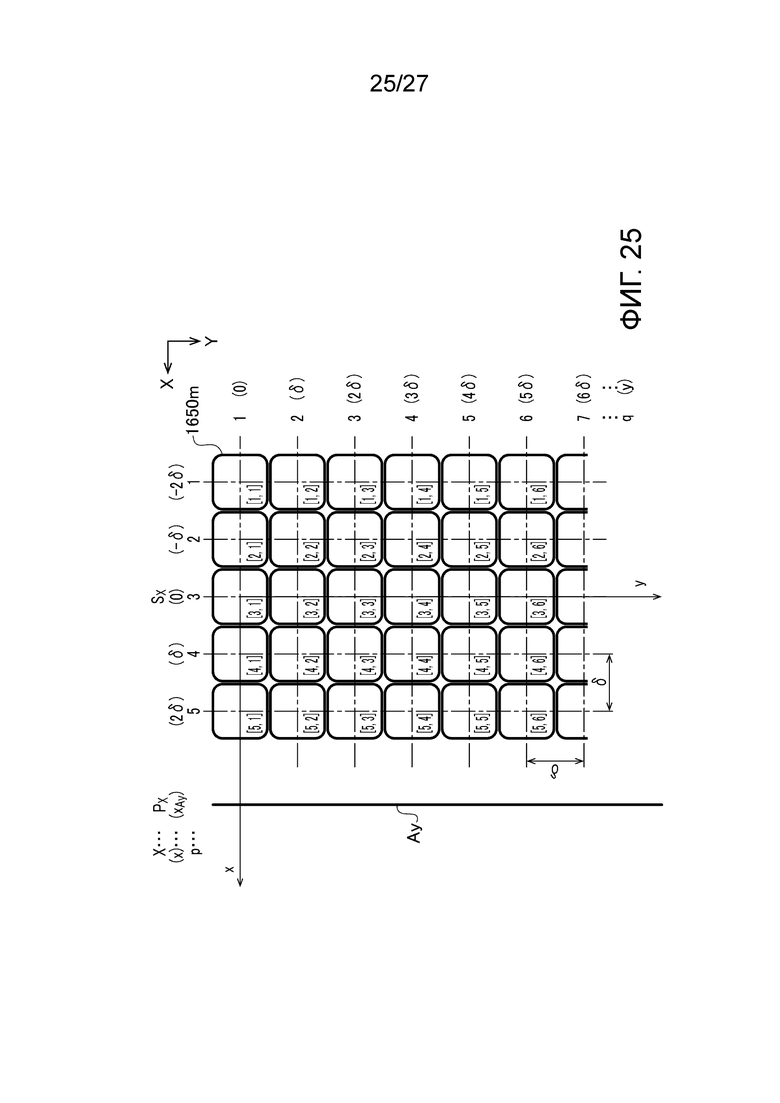
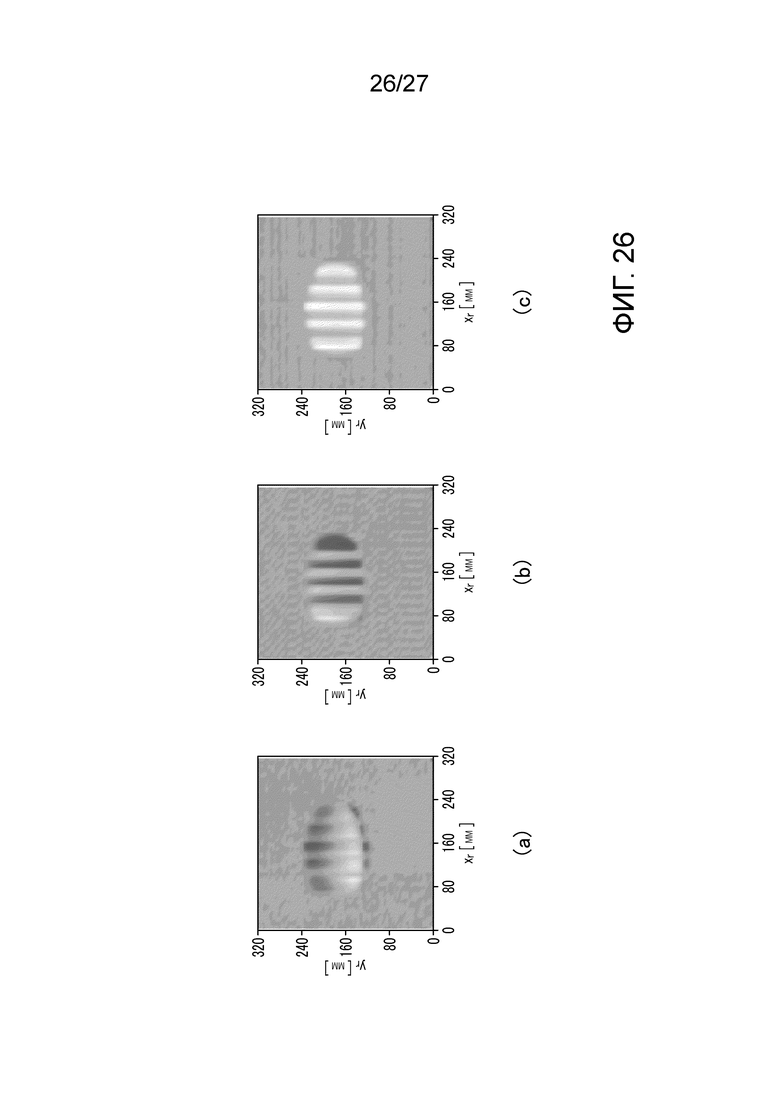

Изобретение предназначено для выполнения стендовых испытаний автомобильных шин. Устройство включает в себя поверхность дорожного покрытия, каретку, выполненную с возможностью удерживания испытательного колеса, на котором установлена испытываемая шина, с возможностью его вращения и способную перемещаться вдоль поверхности дорожного покрытия в состоянии, в котором испытываемая шина находится в контакте с поверхностью дорожного покрытия, и направляющий механизм, выполненный с возможностью направления перемещения каретки в направлении движения. Направляющий механизм включает в себя рельсовую направляющую, проходящую в направлении движения каретки, и подвижный элемент, прикрепленный к каретке и выполненный с возможностью перемещения по рельсовой направляющей. Подвижный элемент включает в себя ролик, выполненный с возможностью качения по рельсовой направляющей, и подшипник, выполненный с возможностью обеспечения опоры для ролика с возможностью вращения. Технический результат - повышение точности и эффективности стендовых испытаний шины. 8 з.п. ф-лы, 27 ил.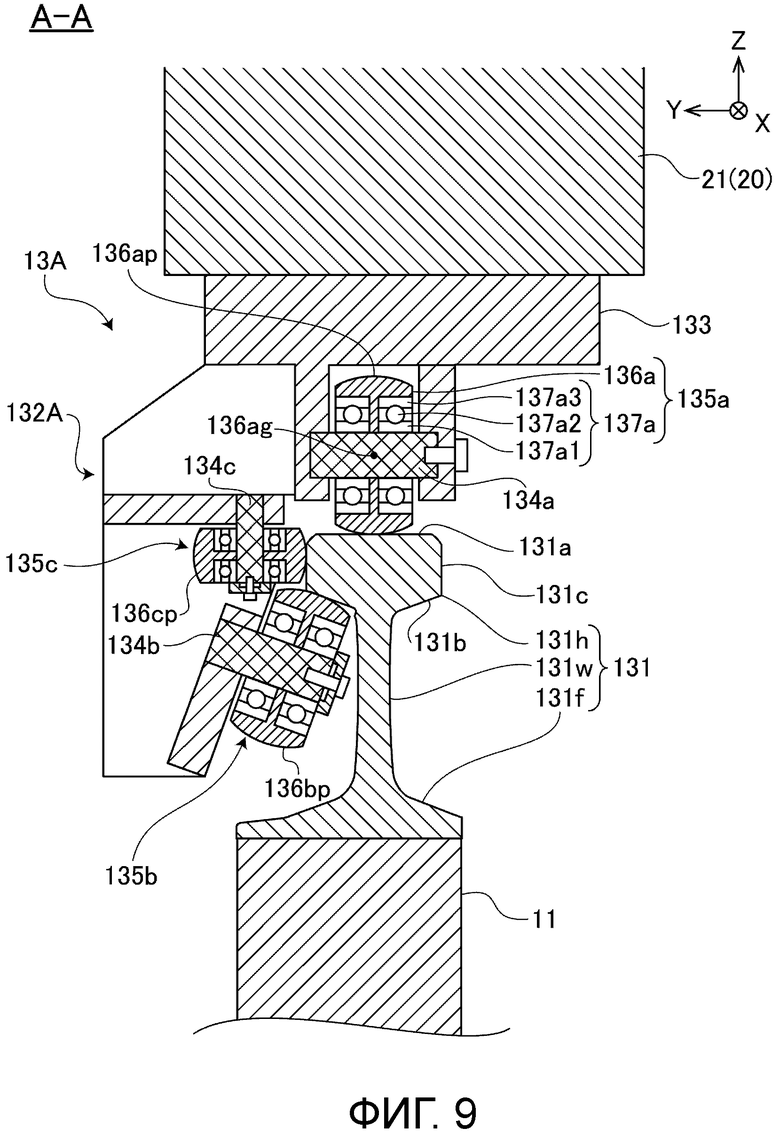
1. Устройство для испытаний шин, содержащее:
поверхность дорожного покрытия;
каретку, выполненную с возможностью удерживания испытательного колеса, на котором установлена испытываемая шина, с возможностью его вращения и выполненную с возможностью перемещения вдоль поверхности дорожного покрытия в состоянии, в котором испытываемая шина находится в контакте с поверхностью дорожного покрытия; и
направляющий механизм, выполненный с возможностью направления перемещения каретки в направлении движения,
при этом направляющий механизм включает в себя:
- рельсовую направляющую, проходящую в направлении движения каретки; и
- подвижный элемент, прикрепленный к каретке и выполненный с возможностью перемещения по рельсовой направляющей,
причем подвижный элемент включает в себя:
- ролик, выполненный с возможностью качения по рельсовой направляющей; и
- подшипник, выполненный с возможностью обеспечения опоры для ролика с возможностью вращения,
при этом подшипник представляет собой подшипник качения, включающий в себя тела качения, катящиеся по круговой дорожке качения;
причем подвижный элемент содержит множество роликов;
при этом множество роликов включает в себя:
- первый ролик, выполненный с возможностью качения по верхней поверхности головки рельсовой направляющей; и
- по меньшей мере один из второго ролика, выполненного с возможностью качения по нижней поверхности головки рельсовой направляющей, и третьего ролика, выполненного с возможностью качения по боковой поверхности головки рельсовой направляющей;
причем устройство для испытаний шин содержит множество направляющих механизмов, включающее в себя первый направляющий механизм и второй направляющий механизм, рельсовые направляющие которых расположены параллельно друг другу в направлении ширины;
при этом в первом направляющем механизме ролики, за исключением первого ролика, расположены только на одной стороне рельсовой направляющей в направлении ширины, а
во втором направляющем механизме ролики, за исключением первого ролика, расположены только на другой стороне рельсовой направляющей в направлении ширины.
2. Устройство для испытаний шин по п.1, в котором
в первом направляющем механизме ролики, за исключением первого ролика, расположены на стороне рельсовой направляющей, противоположной второму направляющему механизму, а
во втором направляющем механизме ролики, за исключением первого ролика, расположены на стороне рельсовой направляющей, противоположной первому направляющему механизму.
3. Устройство для испытаний шин по п.1, в котором
в первом направляющем механизме ролики, за исключением первого ролика, расположены на той же стороне рельсовой направляющей, что и второй направляющий механизм, а
во втором направляющем механизме ролики, за исключением первого ролика, расположены на той же стороне рельсовой направляющей, что и первый направляющий механизм.
4. Устройство для испытаний шин по п.1, в котором
множество роликов сгруппированы в множество групп,
при этом множество групп роликов расположены в направлении движения каретки,
причем каждая из множества групп роликов включает в себя первый ролик и по меньшей мере один из второго ролика и третьего ролика.
5. Устройство для испытаний шин по п.1, в котором
подвижный элемент включает в себя:
- раму, прикрепленную к каретке; и
- множество стержней, опирающихся на раму, а
подшипник включает в себя:
- внутреннее кольцо, установленное с прилеганием к стержню;
- наружное кольцо, установленное с прилеганием к внутренней периферийной поверхности ролика; и
- множество тел качения, расположенных между наружной периферийной поверхностью внутреннего кольца и внутренней периферийной поверхностью наружного кольца.
6. Устройство для испытаний шин по п.1, в котором
множество направляющих механизмов включает в себя третий направляющий механизм,
при этом в третьем направляющем механизме ролики, за исключением первого ролика, расположены только с указанной одной стороны рельсовой направляющей.
7. Устройство для испытаний шин по п.6, в котором третий направляющий механизм расположен между первым направляющим механизмом и вторым направляющим механизмом.
8. Устройство для испытаний шин по п.6, в котором второй направляющий механизм расположен между первым направляющим механизмом и третьим направляющим механизмом.
9. Устройство для испытаний шин по п.1, в котором рельсовая направляющая представляет собой железнодорожный рельс.
| US 20140090461 A1, 03.04.2014 | |||
| CN 202851645 U, 03.04.2013 | |||
| KR 102005187 B1, 29.07.2019 | |||
| JP 201420807 A, 03.02.2014. |
