Изобретение относится к области мониторинга местоположения груза и может быть использовано для определения местоположения груза, транспортируемого железнодорожным транспортом.
Известен способ оперативного мониторинга транспортных средств [патент WO №2012002838 A2, G08G 1/123, 2.07.2010], по которому формируют пакеты информации с включением в них данных о координатах транспортного средства, текущей дате, времени и состоянии отдельных подсистем транспортного средства, преобразование указанных пакетов информации в электрический сигнал, передачу этого сигнала дискретно, в реальном масштабе времени на центральный диспетчерский пункт, периодический прием информационных пакетов, обработку, хранение и отображение информации о транспортном средстве на электронной карте местности, при этом формировании массива данных для передачи формируют опорные и промежуточные пакеты, в состав каждого опорного пакета вносятся все текущие данные от всех датчиков, координаты, дата и время в полном объеме, передача опорного пакета осуществляется в любом случае, независимо от состояния транспортного средства, в состав промежуточного пакета входят изменения значения данных от датчиков и приращение времени этого изменения относительно предыдущею опорного пакета, либо изменения координат и приращение времени этого изменения относительно предыдущего опорного пакета, формирование и передача промежуточного пакета осуществляется только при превышении установленного порога изменения координат и данных, значение порога изменения данных, при котором осуществляется передача, устанавливается отдельно для каждого вида данных.
Недостатком указанного способа является потеря информации о местонахождении груза при разрядке питающих систему мониторинга аккумуляторов.
Известен способ контроля, реализуемый автоматизированной системой мониторинга перевозок грузов железнодорожным транспортом [патент РФ №2466460 C2, G08G 1/01, 10.07.2012], включающей центральный пункт мониторинга, подвижной пункт мониторинга, центральный диспетчерский пункт предприятия, дополнительные диспетчерские пункты предприятия, выносные автоматизированные рабочие места. Подвижной пункт мониторинга взаимосвязан с центральным пунктом мониторинга, который взаимосвязан по каналам связи с выносными автоматизированными рабочими местами и центральным диспетчерским пунктом предприятия, который взаимосвязан по каналам связи с дополнительными пунктами мониторинга предприятия. Подвижной пункт мониторинга включает блок связи и навигации, аварийный радиомаяк, автоматизированное рабочее место, модуль радиоканала межвагонной связи, источник бесперебойного питания. Комплекс технических средств мониторинга груза включает устройство измерения и регистрации ускорений по трем ортогональным осям, базовую станцию, комплект контактных датчиков, модуль радиоканала межвагонной связи, аккумуляторную батарею.
Недостатком указанного способа является потеря информации о местонахождении груза при разрядке питающих систему мониторинга аккумуляторов и сложность его технической реализации.
Известен способ мониторинга и контроля за местоположением транспортного средства, осуществляющим транспортировку грузов [патент РФ №2157565 C1, G08G 1/123, 10.10.2000], по которому каждому контролируемому транспортному средству задают номер и маршрут следования и осуществляют прием на транспортном средстве навигационных сигналов от глобальной спутниковой системы радионавигации, на основе принятых навигационных сигналов рассчитывают информацию о текущих координатах транспортного средства, сравнивают текущие координаты транспортного средства с заданными координатами.
Недостатком указанного способа является потеря информации о местонахождении груза при разрядке питающих систему мониторинга аккумуляторов.
Наиболее близким по технической сущности и достигаемому результату к заявляемому относится способ контроля за транспортировкой грузов [патент РФ №2177647 C1, G08G 1/00, G08G 1/00, G08B 25/00, 27.12.2001], по которому на транспортном средстве принимают навигационные сигналы от глобальной спутниковой системы радионавигации, вычисляют текущие координаты транспортного средства, формируют и передают через систему сотовой связи в информационно-аналитический центр сигнал, содержащий информацию о коде транспортного средства и его текущих координатах, сигнал принимают в информационно-аналитическом центре, выделяют, запоминают информацию и сравнивают текущие координаты транспортного средства с заданными координатами маршрута транспортного средства для осуществления контроля за маршрутом движения транспортного средства и в случае отклонения от маршрута формируют сигнал оповещения, причем совокупность устройств приема, формирования и передачи сигнала, установленных на транспортном средстве, определяют как систему мониторинга, при этом в контейнере, установленном на транспортном средстве, размещают охранную сигнализацию, при несанкционированном вскрытии контейнера охранная сигнализация формирует сигнал, на основании которого в контейнере формируют сигнал, содержащий информацию о коде контейнера и информацию о несанкционированном вскрытии контейнера, передают его на транспортное средство, на транспортном средстве из принятого сигнала выделяют, запоминают информацию, а также осуществляют оповещение о несанкционированном вскрытии контейнера, информацию о несанкционированном вскрытии контейнера и коде контейнера добавляют в сигнал к информации о коде транспортного средства и его текущих координатах, из принятого в информационно-аналитическом центре сигнала также выделяют и запоминают информацию о несанкционированном вскрытии контейнера и коде контейнера, формируют сигнал оповещения для принятия мер.
Недостатками указанного способа являются ограниченные функциональные возможности, обусловленные невозможностью контроля величины амплитуды колебаний, воздействующих на груз, и потеря информации о местонахождении груза при разрядке питающих систему мониторинга аккумуляторов, а также отсутствие возможности при пропадании сигнала, вызванного разрядкой аккумуляторных батарей, определения местоположения груза с достаточной точностью.
Задача изобретения - расширение функциональных возможностей системы мониторинга, благодаря использованию в качестве источника электрической энергии трехкоординатного электромеханического преобразователя колебательного типа, а также возможность определения состояния транспортного средства, состояния груза и продолжительности стоянки.
Техническим результатом является возможность точного определения местоположения груза при движении транспортного средства независимо от температурных условий окружающей среды, а также определение величины амплитуды колебаний, воздействующих на груз.
Поставленная задача решается и технический результат достигается тем, что способе контроля за транспортировкой грузов, по которому на транспортном средстве принимают навигационные сигналы от глобальной спутниковой системы радионавигации, вычисляют текущие координаты транспортного средства, формируют и передают через систему сотовой связи в информационно-аналитический центр сигнал, содержащий информацию о коде транспортного средства и его текущих координатах, а также о несанкционированном вскрытии контейнера, причем совокупность устройств приема, формирования и передачи сигнала, установленных на транспортном средстве, определяют как систему мониторинга, сигнал принимают в информационно-аналитическом центре, выделяют, запоминают информацию и сравнивают текущие координаты транспортного средства с заданными координатами маршрута транспортного средства, для осуществления контроля за маршрутом движения транспортного средства и в случае отклонения от маршрута формируют сигнал оповещения, согласно изобретению, навигационные сигналы от глобальной спутниковой системы радионавигации принимают непосредственно в контейнере, установленном на транспортном средстве, при этом электрическое питание системы мониторинга осуществляют от трехкоординатного электромеханического преобразователя энергии колебательного типа, которым вырабатывают электрическую энергию только при возникновении механических колебаний, обусловленных движением транспортного средства, а электрическое питание систем сигнализации осуществляют от аккумуляторной батареи, при этом аккумуляторную батарею подзаряжают от трехкоординатного электромеханического преобразователя энергии колебательного типа, при этом величину электродвижущей силы трехкоординатного электромеханического преобразователя энергии колебательного типа передают через систему сотовой связи в информационно-аналитический центр, где по ней рассчитывают величину амплитуды колебаний, воздействующей на груз, и судят о состоянии груза, о состоянии транспортного средства судят по наличию или отсутствию сигнала, и по времени отсутствия сигнала определяют продолжительность стоянки.
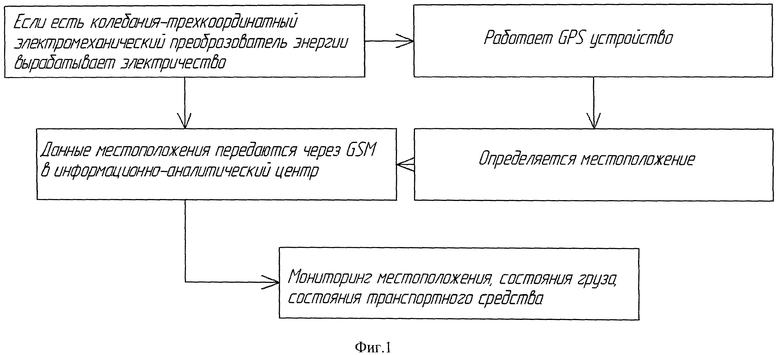
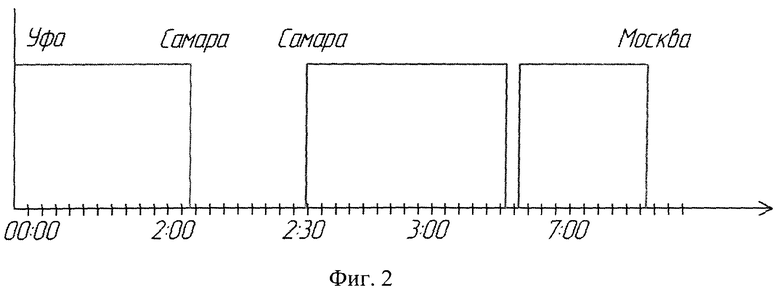
Существо изобретения поясняется чертежами. На фиг.1 изображена структурная схема системы мониторинга. На фиг.2 изображена зависимость сигнала от местоположения груза. На фиг.3 изображена зависимость амплитуды электродвижущей силы от величины сил, воздействующих на контейнер.
Пример конкретной реализации способа
При перемещении груза в контейнере, например партии фарфора, на участке между г. Уфа и г. Москва (конечным пунктом доставки груза является г. Москва) посредством железнодорожного состава, при движении которого возникает энергия колебаний, воздействующих на контейнер, мощностью 5 Вт.С учетом коэффициента полезного действия трехкоординатного электромеханического преобразователя энергии 0,3-0,5, данной энергии достаточно для обеспечения электрического питания модуля Global Positioning System (GPS) от трехкоординатного электромеханического преобразователя колебательного типа (фиг.1), выполненного на основе магнитов NdFeB 38SH.
При этом, соответственно, при стоянке железнодорожного состава энергия колебаний равна 0 и о стоянке и времени стоянки судят по отсутствию сигнала GPS. Так, например, железнодорожный состав совершил стоянку в г. Самара продолжительностью 30 минут, при этом стоянка является запланированной, и в информационно-аналитический центр поступают координаты станции г. Самары, после чего сигнал пропадает на 30 минут. При более продолжительном отсутствии сигнала в информационно-аналитическом центре судят о том, что контейнер с грузом отклонился от маршрута и остался в г. Самара. При этом в информационно-аналитическом центре формируют сигнал оповещения (фиг.2).
При несанкционированном вскрытии контейнера с грузом срабатывает система сигнализации, электрическое питание которой обеспечивается от аккумулятора, и в информационно-аналитический центр передаются координаты местоположения, где произошел несанкционированный доступ.
Также помимо координат местоположения груза в информационно-аналитический центр передается величина электродвижущей силы (ЭДС), вырабатываемой трехкоординатным электромеханическим преобразователем колебательного типа, по величине которой судят об амплитуде колебаний груза, а следовательно, и об его целостности. Величина ЭДС трехкоординатного электромеханического преобразователя колебательного типа определяется в виде:
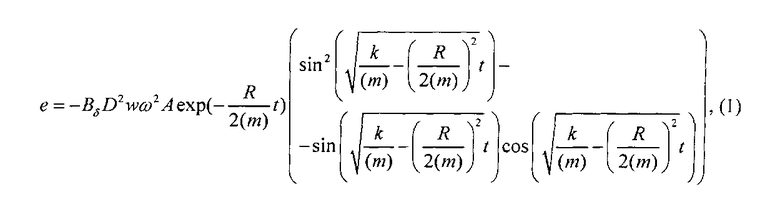
где 
R - коэффициент, характеризующий силу сопротивления, которая принимается в виде Fconp=-Rv;
ω - угловая скорость постоянного магнита;
A - амплитуда колебаний;
D - диаметр кольцевой обмотки;
w - число витков обмотки;
k - коэффициент жесткости стержня;
Bδ - индукция в воздушном зазоре трехкоординатного электромеханического преобразователя колебательного типа.
Так, например, электродвижущая сила, вырабатываемая электромеханическим преобразователем энергии колебательного типа в г. Сызрань, составляет 1В, при этом амплитуда колебаний груза рассчитывается по выражению 1 и равняется 0,1 мм (фиг.3), что является допустимой величиной для фарфора. А на станции Звезда электродвижущая сила составила 7В, при этом амплитуда колебаний груза, рассчитанная по выражению 1, составила 0,7 мм, что является недопустимой величиной для фарфора, и в информационно-аналитическом центре судят о возможном повреждении груза, причем график изменения электродвижущей силы сохраняется и в случае судебных разбирательств при повреждении груза может являться одним из доказательств виновности или невиновности перевозчика.
Таким образом, достигается расширение функциональных возможностей системы мониторинга благодаря использованию в качестве источника электрической энергии трехкоординатного электромеханического преобразователя колебательного типа, а также определяется состояние транспортного средства, состояние груза и продолжительность стоянки.
Итак, заявляемое изобретение позволяет точно определить местоположение груза при движении транспортного средства в независимости от температурных условий окружающей среды, а также определить величину амплитуды колебаний, воздействующей на груз.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2004 |
|
RU2269821C1 |
| Способ передачи данных мониторинга транспортного средства | 2023 |
|
RU2814573C1 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2001 |
|
RU2177647C1 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2010 |
|
RU2452996C1 |
| СИСТЕМА УЧЁТА, НАВИГАЦИИ И МОНИТОРИНГА ОБЪЕКТОВ | 2017 |
|
RU2648967C1 |
| ТЕРМИНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2537892C1 |
| СПОСОБ НАВИГАЦИОННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ПОДВИЖНЫМИ СРЕДСТВАМИ | 2014 |
|
RU2561644C1 |
| ЭЛЕКТРОННАЯ НАВИГАЦИОННАЯ ПЛОМБА И СПОСОБ ЕЕ РАБОТЫ | 2020 |
|
RU2739793C1 |
| УСТРОЙСТВО ЗАЩИТЫ ТРАНСПОРТНОГО СРЕДСТВА ОТ УГОНА И КРАЖ | 2004 |
|
RU2264934C1 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 1999 |
|
RU2157565C1 |

Изобретение относится к области мониторинга местоположения груза и может быть использовано для определения местоположения груза, транспортируемого железнодорожным транспортом. Способ включает в себя этапы: вычисление текущих координат, формирование и передачу в информационно-аналитический центр сигнала c информацией о коде транспортного средства и его текущих координатах, а также о несанкционированном вскрытии контейнера, причем совокупность устройств приема, формирования и передачи сигнала, установленных на транспортном средстве, определяют как систему мониторинга. В информационно-аналитическом центре принимают сигнал, выделяют информацию и, сохранив ее, сравнивают текущие координаты транспортного средства с заданными координатами маршрута, и в случае отклонения от маршрута формируют сигнал оповещения. Навигационные сигналы от GPS принимают непосредственно в контейнере, установленном на транспортном средстве, при этом электрическое питание системы мониторинга осуществляют от трехкоординатного электромеханического преобразователя энергии колебательного типа, которым вырабатывают электрическую энергию только при возникновении механических колебаний, обусловленных движением транспортного средства. Электрическое питание систем сигнализации осуществляется от аккумуляторной батареи, при этом аккумуляторную батарею подзаряжают от трехкоординатного электромеханического преобразователя энергии колебательного типа. Величину электродвижущей силы электромеханического преобразователя передают через систему сотовой связи в информационно-аналитический центр, где по ней рассчитывают величину амплитуды колебаний, воздействующих на груз, и судят о состоянии груза. О состоянии транспортного средства судят по наличию или отсутствию сигнала, и по времени отсутствия сигнала определяют продолжительность стоянки. Достигается повышение точности определения местоположения груза и возможность определения величины амплитуды воздействующей на груз. 3 ил.
Способ контроля за транспортировкой грузов, по которому на транспортном средстве принимают навигационные сигналы от глобальной спутниковой системы радионавигации, вычисляют текущие координаты транспортного средства, формируют и передают через систему сотовой связи в информационно-аналитический центр сигнал, содержащий информацию о коде транспортного средства и его текущих координатах, а также о несанкционированном вскрытии контейнера, причем совокупность устройств приема, формирования и передачи сигнала, установленных на транспортном средстве, определяют как систему мониторинга, сигнал принимают в информационно-аналитическом центре, выделяют, запоминают информацию и сравнивают текущие координаты транспортного средства с заданными координатами маршрута транспортного средства для осуществления контроля за маршрутом движения транспортного средства, и в случае отклонения от маршрута формируют сигнал оповещения, отличающийся тем, что навигационные сигналы от глобальной спутниковой системы радионавигации принимают непосредственно в контейнере, установленном на транспортном средстве, при этом электрическое питание системы мониторинга осуществляют от трехкоординатного электромеханического преобразователя энергии колебательного типа, которым вырабатывают электрическую энергию только при возникновении механических колебаний, обусловленных движением транспортного средства, а электрическое питание систем сигнализации осуществляют от аккумуляторной батареи, при этом аккумуляторную батарею подзаряжают от трехкоординатного электромеханического преобразователя энергии колебательного типа, при этом величину электродвижущей силы трехкоординатного электромеханического преобразователя энергии колебательного типа передают через систему сотовой связи в информационно-аналитический центр, где по ней рассчитывают величину амплитуды колебаний, воздействующих на груз, и судят о состоянии груза, а о состоянии транспортного средства судят по наличию или отсутствию сигнала, и по времени отсутствия сигнала определяют продолжительность стоянки.
| СИСТЕМА УЧЕТА И КОНТРОЛЯ | 2006 |
|
RU2317909C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ СОХРАННОСТИ ГРУЗОВ В ЖЕЛЕЗНОДОРОЖНОМ СОСТАВЕ И СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ СОХРАННОСТИ ГРУЗОВ В ДВИЖУЩЕМСЯ ЖЕЛЕЗНОДОРОЖНОМ СОСТАВЕ | 1997 |
|
RU2138077C1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| СПОСОБ И СИСТЕМА КОМПЛЕКСНОГО ДИСТАНЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ, СОХРАННОСТИ И ГАБАРИТНОСТИ ГРУЗОВ, ПЕРЕВОЗИМЫХ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТОМ | 2006 |
|
RU2317907C2 |

