Группа изобретений относится к измерительной технике и может использоваться при автоматизации технологических процессов, в системах гидропривода, испытательных машинах, прессовом оборудовании. В силу их простоты и высокой надежности ввиду отсутствия трущихся сопряжений индуктивные датчики нашли достаточно широкое применение. При использовании датчиков в производственных условиях следует считаться с тем, что импеданс обмотки зависит не только от положения подвижного элемента, но и от изменения температуры эксплуатации, а в случае измерения больших перемещений, исчисляемых сотнями миллиметров, и от градиента температуры вдоль диапазона измерений. Задача термокомпенсации таких датчиков усложняется комплексным характером импеданса распределенной обмотки, что приводит к необходимости устранения температурного ухода как активной, так и реактивной компонент импеданса. Кроме того, при включении обмотки в наиболее часто используемую мостовую схему проблемной является также процедура балансировки моста переменного тока. Если датчик содержит компоненты, выполненные из ферромагнитных материалов, то значительное влияние на точность измерений оказывают также внешние постоянные и низкочастотные магнитные поля, что имеет место, например, в гидроцилиндрах, плунжер и корпус которых часто имеют значительную остаточную намагниченность. В большинстве случаев с целью температурной компенсации индуктивного датчика, имеющего распределенную измерительную обмотку, в него вводится дополнительная компенсационная обмотка, находящаяся по возможности в тех же температурных условиях, что и измерительная обмотка, но импеданс которой не зависит от положения подвижного элемента.
В способе уравновешивания температурного изменения электрических параметров индуктивно-вихретокового преобразователя перемещений по патенту RU 2305824 C1 от 10.09.2007 используется компенсационная катушка, причем компенсационную и измерительную катушки выполняют с идентичными геометрическими и намоточными характеристиками. Обе катушки включают дифференциально и размещают в непосредственной близости друг от друга, исключая электромагнитную связь между ними. Перед операцией контроля в зону электромагнитного действия компенсационной катушки вводят токопроводящий компенсационный элемент из материала, идентичного по электрофизическим свойствам материалу исследуемого контролируемого объекта, и устанавливают между ними постоянный зазор. Недостатками данного способа является сложность его реализации и неполная термокомпенсация, так как невозможно обеспечить полную идентичность характеристик компенсационной и измерительной катушек, а также одинаковые температурные условия при одновременной электромагнитной изоляции их друг от друга.
По патенту RU 2215985 C2 от 10.11.2003 известен способ компенсации температурной погрешности индуктивного первичного преобразователя, при котором суммируют напряжение переменного тока с напряжением постоянного тока, питают этой суммой напряжений индуктивный первичный преобразователь, отфильтровывают переменные напряжения, получаемые с индуктивного первичного преобразователя, выпрямляют преобразователями средневыпрямленного значения, фильтруют, суммируют, усиливают, считая этот сигнал рабочим, отфильтровывают напряжения постоянного тока, получаемые с индуктивного первичного преобразователя, вычитают одно напряжение из другого, усиливают его, считая этот сигнал корректирующим, вычитают из рабочего сигнала корректирующий сигнал, умножают эту разность на корректирующий сигнал и регистрируют. Недостатком данного способа является недостаточная точность термокомпенсации, так как она фактически осуществляется с помощью падения напряжения на омическом (собственном) активном сопротивлении измерительной обмотки, которое не зависит от положения подвижного элемента преобразователя, тогда как его рабочий сигнал определяется величиной полного эквивалентного импеданса обмотки, изменяющегося при перемещении подвижного элемента. Кроме того, омическое сопротивление обмотки и ее полный импеданс по-разному зависят от температуры.
В патенте DE 3603950 A1 приведено описание устройства для измерения линейных перемещений, в котором сердечник высокой магнитной проницаемости перемещается внутри протяженной измерительной катушки, что приводит к изменению ее индуктивности, которая измеряется с помощью электронного модуля. Температурная компенсация достигается в этом устройстве за счет дополнительной катушки, располагаемой параллельно, которая имеет одинаковые геометрические размеры и электрические параметры, что и измерительная катушка. Недостатком такого устройства является, помимо его относительной сложности, то, что удовлетворительная для практического использования компенсация температурной погрешности достигается лишь в одной точке измеряемого диапазона перемещений.
В отличие от описанного выше устройства в патенте EP 0339750 A3 предлагается компенсационную обмотку конструктивно располагать на том же каркасе, что и измерительную катушку, но вне пределов взаимодействия с подвижным ферромагнитным сердечником. Недостатками такого исполнения являются значительные по сравнению с диапазоном измерений габариты датчика и влияние градиента температуры вдоль диапазона измерений.
В патенте №509573 (Швейцария) с целью снижения температурной погрешности, обусловленной изменением ее активного сопротивления, предлагается выполнять измерительную катушку из провода с малым температурным коэффициентом сопротивления, например из манганина. Однако это приводит к значительному снижению чувствительности датчика и увеличению его стоимости.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому способу температурной компенсации индуктивного датчика положения и взятым в качестве прототипа является объект по патенту DE 4141065 A1 - способ температурной компенсации индуктивных датчиков, содержащих минимум одну катушку, индуктивность которой пропорциональна значению измеряемой физической величины, а активное сопротивление является мерой температуры окружающей среды. Для раздельного измерения индуктивности катушки и ее активного сопротивления предлагается питать ее от источника импульсного напряжения. Измеренные значения индуктивности и активного сопротивления обмотки подаются на входы микроконтроллера, где в табличной форме фиксируются в его запоминающем устройстве для различных значений температуры окружающей среды. С помощью специального алгоритма микроконтроллер осуществляет коррекцию выходного сигнала индуктивного датчика с учетом текущего значения температуры. К недостаткам способа следует отнести сложность схемотехнической реализации и относительно невысокую точность измерений. Кроме того, не учитывается, что калибровочная характеристика датчика зависит от характера температурных условий: распределения температуры по длине датчика, динамики температуры в различных его сечениях и т.п.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому устройству и взятым в качестве прототипа является датчик перемещений, описанный в патенте RU 2127865 C1 от 20.03.1999 (Россия), содержащий измерительную обмотку, равномерно распределенную по длине датчика и охватывающую трубчатый сердечник из магнитомягкого материала. С целью температурной компенсации введена дополнительная обмотка, также распределенная вдоль диапазона измерений, но расположенная ортогонально измерительной обмотке, так что ее импеданс не зависит от положения подвижного элемента. Недостатком такой конструкции является относительная сложность выполнения датчика, что приводит к росту его стоимости. Кроме того, поскольку сердечник, охватываемый обмотками, выполнен из магнитомягкого материала, повышается чувствительность датчика к влиянию внешних магнитных полей.
Задачей и техническим результатом предлагаемых изобретений является упрощение температурной стабилизации индуктивного датчика положения, упрощение его конструкции и уменьшение его себестоимости за счет использования лишь одной, распределенной вдоль диапазона измерений обмотки, выбора оптимальной частоты питания обмотки датчика и упрощения алгоритма термокомпенсации.
Решение задачи и технический результат достигаются тем, что в способе температурной компенсации индуктивного датчика положения, содержащего обмотку, импеданс которой зависит от положения подвижного элемента датчика, при котором выделяют активную и индуктивную компоненты напряжения на обмотке датчика, определяют значения активной и индуктивной компонент напряжения на обмотке датчика в широком диапазоне частот и находят оптимальную частоту питания обмотки из условия, что индуктивная компонента напряжения на обмотке линейно зависит от положения подвижного и имеет лишь аддитивную составляющую температурной погрешности в рабочем диапазоне температур, на оптимальной частоте определяют активную и индуктивную компоненты напряжения на обмотке, преобразуют их в соответствующие напряжения постоянного тока UR и UX и формируют из них выходной сигнал в соответствии с соотношением
Uout=UX-kUR,
где k - постоянный коэффициент, величина которого определяется экспериментально таким образом, чтобы в рабочем диапазоне температур выходной сигнал Uout не зависел от изменения температуры окружающей среды и ее градиента вдоль диапазона измерений.
Решение задачи и технический результат достигаются тем, что в индуктивном датчике положения, состоящем из распределенной вдоль диапазона измерений обмотки на трубчатом сердечнике в защитном проводящем корпусе, охватывающего его подвижного элемента в виде проводящей трубки и электронного модуля, сердечник обмотки выполнен из немагнитного, непроводящего материала, обмотка питается напряжением определенной частоты от генератора напряжения несущей частоты, на первом дополнительном выходе которого сформирован сигнал прямоугольной формы с частотой несущей и совпадающий с ней по фазе, а на втором дополнительном выходе - сигнал прямоугольной формы с частотой несущей, но сдвинутый относительно нее на 90°, основной выход генератора несущей частоты соединен с неинвертирующим входом операционного усилителя, обмотка датчика включена между выходом операционного усилителя и его инвертирующим входом, причем обратный провод обмотки проходит через внутренний канал сердечника, а общая точка соединения обмотки и инвертирующего входа операционного усилителя через образцовый резистор соединена с землей, выводы обмотки соединены со входами первого инструментального усилителя, выход которого разделяется по двум каналам и соединен со входами двух синхронных демодуляторов, причем управляющий вход одного синхронного демодулятора соединен с первым дополнительном выходом генератора напряжения несущей частоты, управляющий вход другого синхронного демодулятора соединен со вторым дополнительном выходом генератора напряжения несущей частоты, а выходы синхронных демодуляторов подключены ко входам соответствующих фильтров нижних частот, выходы которых соединены со входами масштабирующих усилителей постоянного тока, выходы которых подключены ко входам второго инструментального усилителя, формирующего выходной сигнал датчика как линейную комбинацию напряжений на его входах с коэффициентом, значение которого подбирается экспериментально.
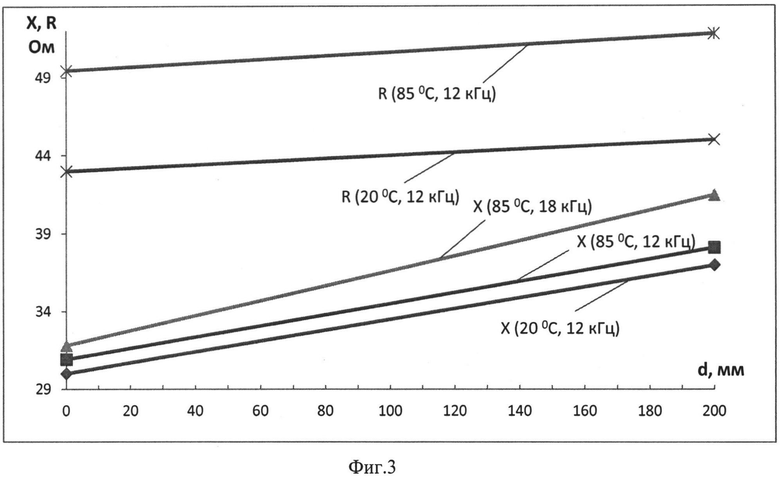
На Фигуре 1 схематически изображен индуктивный датчик положения с распределенной вдоль диапазона измерений обмоткой. На Фигуре 2 показана блок-схема электронного модуля, реализующего предлагаемый способ термокомпенсации индуктивного датчика положения. На Фигуре 3 приведены графики зависимости индуктивной и активной компонент импеданса обмотки от изменения температуры окружающей среды при различных частотах питания обмотки.
Состав датчика: обмотка 1, сердечник обмотки 2, цилиндрический корпус 3, подвижный элемент 4, разъем 5, фланец с электронным модулем 6 (Фиг.1). Состав электронного модуля: генератор напряжения несущей частоты 7 с основным и двумя дополнительными выходами соответственно Вых, Вых 1, Вых 2, операционный усилитель 8, первый инструментальный усилитель 9, синхронные демодуляторы 10 и 11, фильтры нижних частот 12 и 13, масштабирующие усилители 14 и 15, второй инструментальный усилитель 16, образцовый резистор 17 (Фиг.2).
Заявленные технические решения работают следующим образом.
В основе предлагаемых изобретений лежит то обстоятельство, что импеданс распределенной вдоль диапазона измерений обмотки имеет комплексный характер и является частотно-зависимым. Авторами замечено, что при определенной частоте переменного напряжения, питающего датчик, индуктивная компонента импеданса обмотки является линейной функцией положения подвижного элемента, перекрывающего обмотку, в то время как активная компонента импеданса мало зависит от его положения. В дальнейшем будем называть условно эту частоту оптимальной. Второй важной особенностью, выявленной авторами, является то, что на оптимальной частоте питания обмотки в рабочем диапазоне температур зависимость индуктивной компоненты импеданса имеет лишь аддитивную составляющую температурной погрешности, в то время как активная компонента практически прямо пропорциональна изменению температуры окружающей среды. Ввиду того что индуктивная составляющая импеданса имеет лишь аддитивную составляющую температурного ухода, он может быть просто скомпенсирован с помощью активной компоненты импеданса. Другой важной особенностью предлагаемого изобретения является то, что обе компоненты импеданса одновременно распределены вдоль диапазона измерений и поэтому влияние градиента температуры также может быть скомпенсировано чисто алгоритмически.
По способу температурной компенсации индуктивного датчика положения его обмотку питают переменным напряжением по схеме, обеспечивающей независимость тока через обмотку от положения подвижного элемента, так что падение напряжения на обмотке прямо пропорционально ее импедансу. Для заданных диапазона измерений, рабочего диапазона температур и выбранных размеров датчика экспериментально определяют значения активной и индуктивной компонент напряжения на обмотке датчика в широком диапазоне частот и находят оптимальную частоту питания обмотки из условия, что индуктивная компонента напряжения на обмотке линейно зависит от положения подвижного и имеет лишь аддитивную составляющую температурной погрешности в рабочем диапазоне температур, на оптимальной частоте определяют активную и индуктивную компоненты напряжения на обмотке, преобразуют их в соответствующие напряжения постоянного тока UR и UX и формируют из них выходной сигнал в соответствии с соотношением
Uout=UX-kUR,
где k - постоянный коэффициент, величина которого определяется экспериментально таким образом, чтобы в рабочем диапазоне температур выходной сигнал Uout не зависел от изменения температуры окружающей среды и ее градиента вдоль диапазона измерений.
В устройстве, реализующем способ температурной компенсации индуктивного датчика положения, обмотка 1, распределенная вдоль сердечника обмотки 2, помещается в цилиндрический корпус 3, выполненный из немагнитной стали определенной толщины. Один вывод обмотки 1 соединен с контактом K2 разъема 5, а другой вывод проходит через внутреннее отверстие сердечника обмотки 2 и подсоединен к контакту K1 разъема 5, что обеспечивает дополнительную помехозащищенность от внешних электромагнитных полей. Поверх цилиндрического корпуса 3 коаксиально с фиксированным зазором перемещается подвижный элемент 4 в виде трубки из материала с высокой электропроводностью, например из алюминиевого сплава. С помощью фланца с электронным модулем 6 осуществляется крепление датчика к объекту измерения. Предпочтительно, чтобы сердечник обмотки 2 был выполнен из неэлектропроводящего немагнитного материала, например пластика или керамики. Цилиндрический корпус 3 имеет толщину стенки, лежащую в пределах от 0,5 до 2 мм в зависимости от величины внешнего давления и чисто конструктивных соображений. Важно при этом, чтобы электрическая проводимость материала цилиндрического корпуса 3 была в несколько раз меньше, чем электрическая проводимость подвижного элемента 4. Подвижный элемент 4 через цилиндрический корпус 3 оказывает экранирующее воздействие на обмотку 1, вследствие чего в зависимости от относительного положения подвижного элемента 4 при его перемещении вдоль цилиндрического корпуса 3 происходит изменение импеданса обмотки 1, значение которого является мерой положения подвижного элемента 4 относительно неподвижного цилиндрического корпуса 3.
Обмотка 1 включается между выходом операционного усилителя 8 и его инвертирующим входом, а его неинвертирующий вход соединен с основным выходом Вых генератора напряжения несущей частоты 7. Операционный усилитель 8 и обмотка 1 с помощью образцового резистора 17 включены по схеме преобразования напряжение-ток, при этом величина тока, протекающего через обмотку 1, не зависит от положения подвижного элемента 4 и определяется только величиной образцового резистора 17. Таким образом, падение напряжения на обмотке 1 прямо пропорционально ее импедансу и измеряется с помощью первого инструментального усилителя 9, выход которого разветвляется по двум каналам. Каждый канал содержит соответственно синхронные демодуляторы 10 и 11, фильтры нижних частот 12 и 13, масштабирующие усилители 14 и 15. Выходы масштабирующих усилителей 14 и 15 соединены с входами второго инструментального усилителя 16. Генератор напряжения несущей частоты 8 имеет два дополнительных выхода Вых1 и Вых2, на которых сформированы напряжения прямоугольной формы с той же частотой, что и напряжение U~ на его основном выходе Вых, при этом напряжение на Вых1 находится в фазе с напряжением U~, в то время как напряжение на Вых2 сдвинуто по отношению к ним на 90°. Напряжение с Вых1 подается на управляющий вход синхронного демодулятора 10, а напряжение с Вых2 - на управляющий вход синхронного демодулятора 11. В результате на выходе масштабирующего усилителя 14 формируется сигнал напряжения постоянного тока, пропорциональный активной компоненте напряжения с обмотки 1, а на выходе масштабирующего усилителя 15 - сигнал напряжения постоянного тока, пропорционального индуктивной компоненте напряжения с обмотки 1. С помощью второго инструментального усилителя 16 эти напряжения вычитаются с определенным коэффициентом, значение которого подбирается экспериментально. В результате на его выходе образуется сигнал, величина которого прямо пропорциональна положению подвижного элемента 4 относительно цилиндрического корпуса 3 и практически не зависит от изменения температуры окружающей среды и ее градиента вдоль диапазона измерений.
Авторы изготовили опытный образец индуктивного датчика положения, реализующего предложенный способ температурной компенсации, со следующими параметрами: диапазон измерения 200 мм, длина корпуса 240 мм, длина подвижной трубки 270 мм, толщина стенки корпуса датчика 0,8 мм, диаметры корпуса и подвижной трубки 9 мм и 12 мм соответственно, материал, из которого они выполнены, - немагнитная сталь и сплав алюминия соответственно. Частота переменного напряжения, питающего обмотку, - 12 кГц (оптимальное значение для данной конструкции). Экспериментальные исследования показали, что на этой частоте температурная погрешность датчика в диапазоне -30+85°C составила 0,01% от диапазона измерения на градус, тогда как на частоте 18 кГц погрешность составила 0,023%, а на частоте 8 кГц - 0,019%.
На фиг.3 показаны графически зависимости активной R(d,T) и индуктивной X(d,T) компонент импеданса обмотки 1 от температуры T для различных положений d подвижной трубки 4 при различных частотах напряжения, питающего обмотку 1. Видно, что на частоте, называемой оптимальной (в данном случае 12 кГц), температурный уход индуктивной компоненты импеданса обмотки 1 носит чисто аддитивный характер и может быть легко скомпенсирован с помощью активной компоненты этого импеданса. Заметим при этом, что на частотах, меньших или больших оптимальной частоты (в данном случае 18 кГц), температурная зависимость индуктивной компоненты импеданса обмотки 1 носит одновременно как мультипликативный, так и аддитивный характер, и эффективная компенсация температурной погрешности датчика указанным простым способом оказывается невозможной.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОКОВИХРЕВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2000 |
|
RU2207499C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ (ВАРИАНТЫ) | 1997 |
|
RU2127865C1 |
| Устройство для преобразования перемещений в электрический сигнал | 1973 |
|
SU492725A1 |
| Устройство для контроля состояния объекта в процессе усталостных испытаний | 1989 |
|
SU1748004A1 |
| Блок памяти для полупостоянного запоминающего устройства | 1987 |
|
SU1499404A1 |
| Блок памяти для трансформаторного ПЗУ | 1987 |
|
SU1506484A1 |
| Устройство для преобразования перемещения в электрический сигнал | 1988 |
|
SU1665220A1 |
| Устройство для определения энергии,рассеянной в материале за один цикл переменной нагрузки | 1985 |
|
SU1295209A1 |
| Устройство для преобразования перемещений в электрический сигнал | 1981 |
|
SU1013735A1 |
| Устройство для преобразования сдвига фаз в двоичный код | 1986 |
|
SU1456897A1 |

Группа изобретений относится к измерительной технике. Сущность: определяют значения активной и индуктивной компонент напряжения на обмотке датчика в широком диапазоне частот. Находят оптимальную частоту питания обмотки из условия, что индуктивная компонента напряжения на обмотке линейно зависит от положения подвижного элемента и имеет лишь аддитивную составляющую температурной погрешности в рабочем диапазоне температур. На оптимальной частоте определяют активную и индуктивную компоненты напряжения на обмотке, преобразуют их в напряжения постоянного тока и формируют из них выходной сигнал. Устройство содержит обмотку на сердечнике в проводящем цилиндрическом корпусе, охватывающий его подвижный элемент в виде проводящей трубки и электронный модуль. Сердечник обмотки выполнен из немагнитного непроводящего материала. Обмотка питается напряжением определенной частоты. Электронный модуль содержит средства для выделения активной и индуктивной компонент напряжения на обмотке, преобразования их в соответствующие напряжения постоянного тока и формирования из них линейной комбинации, пропорциональной положению подвижного элемента, с коэффициентом, значение которого подбирается экспериментально. Технический результат: упрощение термокомпенсации индуктивного датчика положения, упрощение его конструкции и уменьшение его себестоимости. 2 н.п. ф-лы, 3 ил.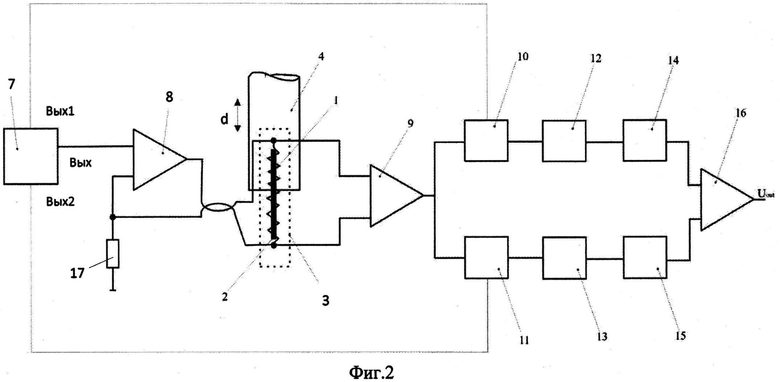
1. Способ температурной компенсации индуктивного датчика положения, содержащего обмотку, импеданс которой зависит от положения подвижного элемента датчика, при котором выделяют активную и индуктивную компоненты напряжения на обмотке датчика, отличающийся тем, что определяют значения активной и индуктивной компонент напряжения на обмотке датчика в широком диапазоне частот и находят оптимальную частоту питания обмотки из условия, что индуктивная компонента напряжения на обмотке линейно зависит от положения подвижного элемента и имеет лишь аддитивную составляющую температурной погрешности в рабочем диапазоне температур, на оптимальной частоте определяют активную и индуктивную компоненты напряжения на обмотке, преобразуют их в соответствующие напряжения постоянного тока UR и UX и формируют из них выходной сигнал в соответствии с соотношением
Uout=UX-kUR,
где k - постоянный коэффициент, величина которого определяется экспериментально таким образом, чтобы в рабочем диапазоне температур выходной сигнал Uout не зависел от изменения температуры окружающей среды и ее градиента вдоль диапазона измерений.
2. Индуктивный датчик положения, состоящий из распределенной вдоль диапазона измерений обмотки на трубчатом сердечнике в защитном проводящем корпусе, охватывающего его подвижного элемента в виде проводящей трубки и электронного модуля, отличающийся тем, что сердечник обмотки выполнен из немагнитного, непроводящего материала, обмотка питается напряжением определенной частоты от генератора напряжения несущей частоты, на первом дополнительном выходе которого сформирован сигнал прямоугольной формы с частотой несущей и совпадающий с ней по фазе, а на втором дополнительном выходе - сигнал прямоугольной формы с частотой несущей, но сдвинутый относительно нее на 90°, основной выход генератора несущей частоты соединен с неинвертирующим входом операционного усилителя, обмотка датчика включена между выходом операционного усилителя и его инвертирующим входом, причем обратный провод обмотки проходит через внутренний канал сердечника, а общая точка соединения обмотки и инвертирующего входа операционного усилителя через образцовый резистор соединена с землей, выводы обмотки соединены со входами первого инструментального усилителя, выход которого разделяется по двум каналам и соединен со входами двух синхронных демодуляторов, причем управляющий вход одного синхронного демодулятора соединен с первым дополнительном выходом генератора напряжения несущей частоты, управляющий вход другого синхронного демодулятора соединен со вторым дополнительном выходом генератора напряжения несущей частоты, а выходы синхронных демодуляторов подключены ко входам соответствующих фильтров нижних частот, выходы которых соединены со входами масштабирующих усилителей постоянного тока, выходы которых подключены ко входам второго инструментального усилителя, формирующего выходной сигнал датчика как линейную комбинацию напряжений на его входах с коэффициентом, значение которого подбирается экспериментально.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ (ВАРИАНТЫ) | 1997 |
|
RU2127865C1 |
| DE 4141065 A1, 17.06.1993 | |||
| СПОСОБ КОМПЕНСАЦИИ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ ИНДУКТИВНОГО ПЕРВИЧНОГО ПРЕОБРАЗОВАТЕЛЯ | 2001 |
|
RU2215985C2 |
| Устройство для бесконтактного измерения расстояний | 1989 |
|
SU1760310A1 |
| Устройство для измерения перемещений | 1990 |
|
SU1737259A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2121129C1 |
| ИНДУКЦИОННЫЙ КОМПАС | 1936 |
|
SU49304A1 |
| JP 59133405 A, 31.07.1984 . | |||

