ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к устройству сцепления зацепляющего типа, которое соединяет две детали, чтобы обеспечить передачу крутящего момента посредством зацепления собачек друг с другом.
УРОВЕНЬ ТЕХНИКИ
Публикация японской патентной заявки № 2014-98459 (JP 2014-98459 A) раскрывает устройство сцепления зацепляющего типа, которое конфигурируется так, чтобы соединять ступицу диска сцепления и кольцо сцепления друг с другом посредством цилиндрической муфты, зацепляющейся со ступицей диска сцепления, которая соединяется с вращающимся валом и кольцом сцепления, которое соединяется с выходным валом, чтобы иметь возможность передачи крутящего момента. Это устройство сцепления зацепляющего типа конфигурируется так, чтобы переключаться между включением (зацеплением) и выключением (расцеплением) посредством муфты, перемещаемой в осевом направлении посредством актуатора. Когда устройство сцепления зацепляющего типа включается, муфта перемещается в позицию, достигнутую непосредственно перед тем, как муфта и кольцо сцепления зацепляются друг с другом, и затем муфта временно останавливается. Затем, муфта перемещается, чтобы иметь возможность зацепляться с кольцом сцепления. Фрагменты полусферической проекции формируются в муфте и кольце сцепления. Фрагменты проекции формируются в позиции касания в случае, когда муфта и кольцо сцепления вращаются относительно друг друга с муфтой, перемещенной в позицию, достигнутую непосредственно перед началом зацепления между муфтой и кольцом сцепления. Соответственно, то, перемещается или нет муфта в позицию, достигнутую непосредственно перед началом зацепления с кольцом муфты, определяется посредством датчика хода, обнаруживающего фрагменты проекции, находящиеся в контакте друг с другом, и муфту, отталкиваемую назад.
Публикация японской патентной заявки № 2007-285448 (JP 2007-285448 A) раскрывает коробку передач, в которой устройство сцепления фрикционного типа размещается на стороне выше по потоку пути передачи мощности, а устройство сцепления зацепляющего типа размещается на его стороне ниже по потоку. Эта коробка передач конфигурируется так, чтобы устанавливать заданную передачу посредством включения устройства сцепления зацепляющего типа после выключения устройства сцепления фрикционного типа и затем включения устройства сцепления фрикционного типа. Это устройство сцепления фрикционного типа включается посредством фрикционного диска, прижимаемого поршнем. Поршень конфигурируется так, чтобы перемещаться в позицию между позицией поршня, в которой устройство сцепления фрикционного типа находится в так называемом полусцепленном состоянии, и позицией поршня, в которой устройство сцепления фрикционного типа находится в состоянии полного расцепления, когда устройство сцепления фрикционного типа временно расцепляется, как описано выше. Позиция поршня определяется посредством датчика хода.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В механизме сцепления зацепляющего типа соответствующие зацепляющие зубцы широко разводятся друг от друга в выключенном состоянии. Это устраняет контакт между зацепляющими зубцами, который сопровождает вибрацию, ошибки сборки или т.п. Соответственно, в случае включения, зацепляющие зубцы начинают зацепляться друг с другом, после того как выбирается разделительное расстояние. Движение для выбора этого разделительного расстояния называется холостым ходом, а время холостого хода вызывает задержку сцепления. В устройстве, которое раскрывается в публикации японской патентной заявки № 2014-98459 (JP 2014-98459 A), позиция, достигнутая непосредственно перед началом зацепления между соответствующими зубцами, может быть обнаружена посредством датчика хода, но движение (холостой ход) в позицию, достигнутую непосредственно перед зацеплением, не может быть ускорено, и время перемещения не может быть сокращено. Соответственно, существует пространство для улучшения относительно реакции сцепления механизма сцепления зацепляющего типа.
Изобретение было задумано, принимая во внимание вышеописанную техническую проблему, и его задачей является создание устройства сцепления зацепляющего типа, которое может улучшать реакцию сцепления, сокращая время операции, затрачиваемое для того, чтобы зацепляющие зубцы начали зацепляться друг с другом.
Устройство сцепления зацепляющего типа согласно аспекту изобретения включает в себя первую деталь, вторую деталь, прижимающий механизм и механизм противодействующей силы. Первая деталь снабжается множеством первых собачек. Множество первых собачек размещается с равными интервалами в круговом направлении первой детали. Вторая деталь снабжается множеством вторых собачек. Множество вторых собачек размещается с равными интервалами в круговом направлении второй детали. Прижимающий механизм конфигурируется так, чтобы прижимать первую деталь в сторону второй детали, так что первые собачки вставляются между и зацепляются со вторыми собачками, когда первая деталь прижимается. Механизм противодействующей силы конфигурируется так, чтобы сформировать противодействующую силу относительно прижимающей силы, прижимающей первую деталь для того, чтобы первые собачки и вторые собачки зацеплялись друг с другом, так что величина увеличения противодействующей силы относительно перемещения первой детали больше в позиции дальше на стороне второй детали, чем в заданной позиции, по сравнению с величиной увеличения для заданной позиции, когда первая деталь прижимается. Заданная позиция является позицией, достигнутой до тех пор, когда соответствующие собачки начинают зацепляться друг с другом, после того как первая деталь прижимается и начинает двигаться в сторону второй детали.
В устройстве сцепления зацепляющего типа согласно аспекту, описанному выше, механизм противодействующей силы может иметь первую упругую деталь, вынуждающую силу упругости действовать на первую деталь независимо от позиции первой детали, и вторую упругую деталь в соприкосновении с первой деталью и вынуждающую силу упругости действовать на первую деталь в случае, когда первая деталь перемещается в заданную позицию.
Устройство сцепления зацепляющего типа согласно аспекту, описанному выше, конфигурируется так, чтобы позволять соответствующим собачкам зацепляться друг с другом, прижимая первую деталь посредством прижимающего механизма. Кроме того, механизм противодействующей силы предусматривается, чтобы формировать противодействующую силу относительно прижимающей силы, характерной для прижимающего механизма. Этот механизм противодействующей силы конфигурируется так, что величина увеличения в противодействующей силе относительно перемещения первой детали больше в позиции дальше на стороне второй детали, чем заданная позиция, по сравнению с величиной увеличения для заданной позиции в заданной позиции, достигнутой между началом перемещения первой детали и началом зацепления между соответствующими собачками. Соответственно, когда первая деталь прижимается посредством прижимающего механизма, так что первая деталь перемещается в заданную позицию, избыточное перемещение первой детали может быть пресечено, даже когда прижимающая сила, характерная для прижимающего механизма, изменяется в направлении увеличения. Другими словами, может быть пресечено избыточное приближение соответствующих собачек. Соответственно, первая деталь может прижиматься с относительно высоким уровнем прижимающей силы, и, таким образом, может быть сокращено время срабатывания первой детали, затрачиваемое, чтобы соответствующие зубцы начали зацепляться друг с другом. Другими словами, может быть улучшена реакция сцепления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Признаки, преимущества и техническое и промышленное значение примерных вариантов осуществления изобретения будут описаны ниже со ссылкой на прилагаемые чертежи, на которых аналогичными ссылочными позициями обозначены аналогичные элементы и на которых:
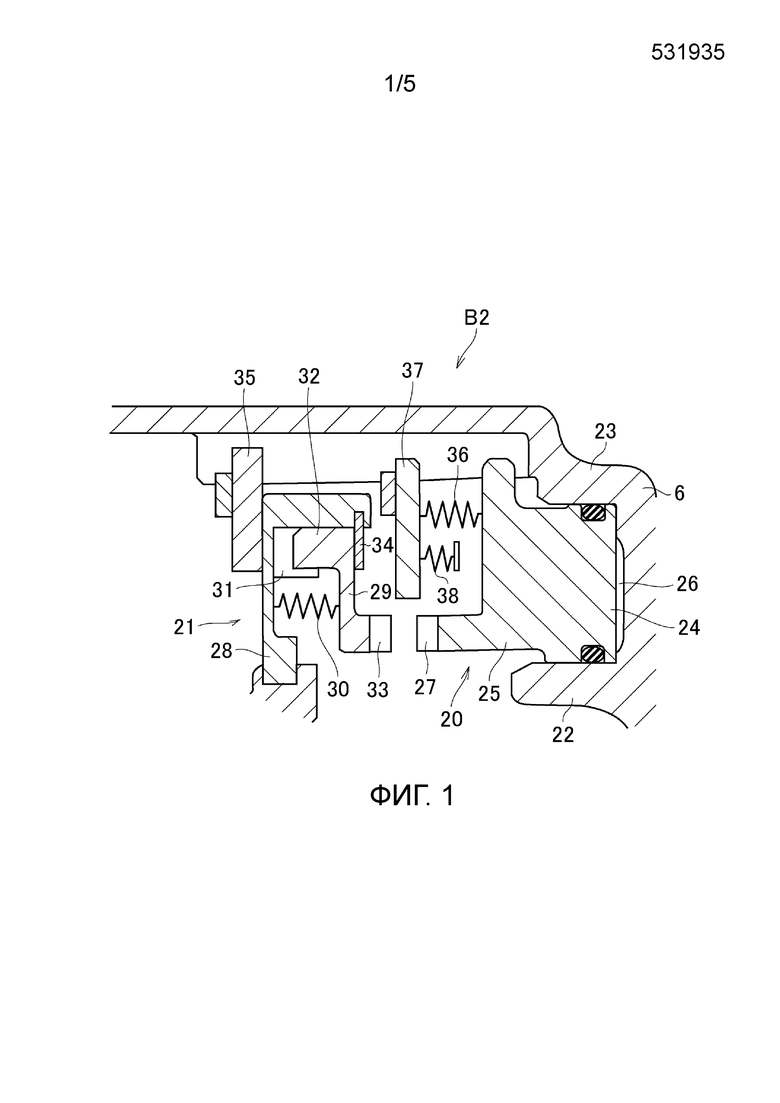
Фиг. 1 – вид в разрезе, чтобы показывать пример устройства сцепления зацепляющего типа согласно изобретению.
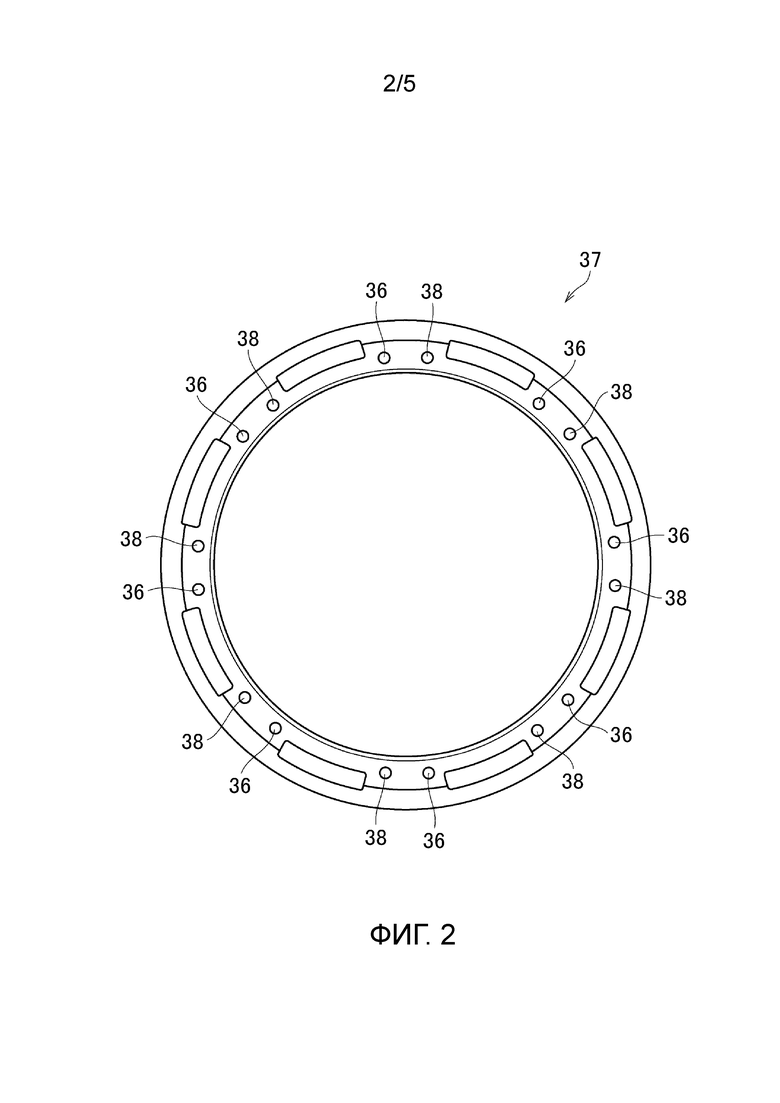
Фиг. 2 – схема, иллюстрирующая позиции, где соответствующие возвратные пружины установлены в седле пружины.
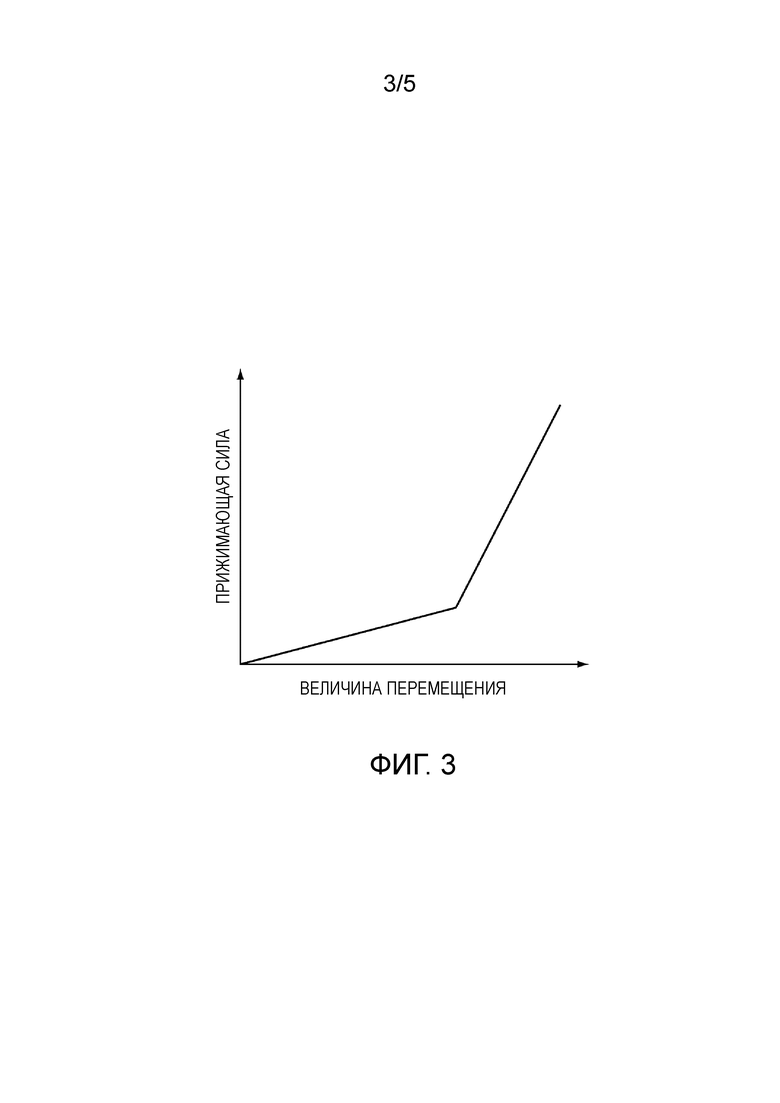
Фиг. 3 – схема, иллюстрирующая величину перемещения первого поршня и величину прижимающей силы, которая требуется, чтобы перемещать первый поршень.
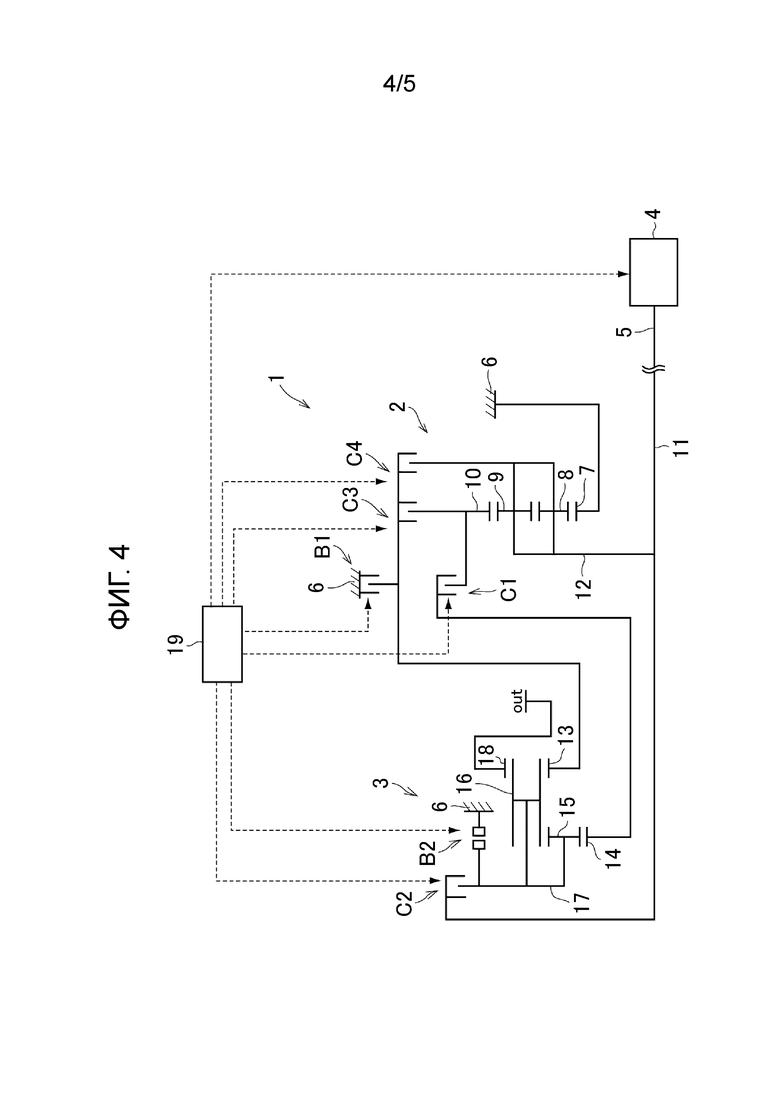
Фиг. 4 – принципиальная схема, иллюстрирующая пример коробки передач согласно изобретению.
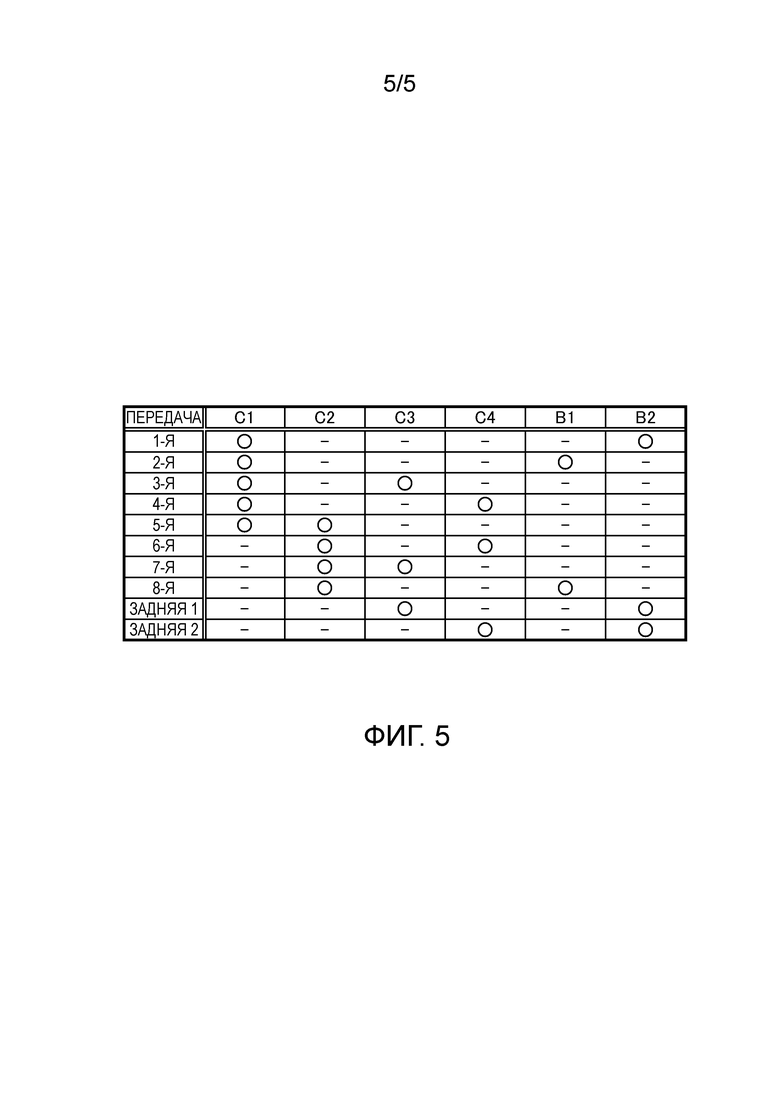
Фиг. 5 – таблица, иллюстрирующая механизмы сцепления, которые сцепляются, чтобы устанавливать соответствующие передачи.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Пример коробки передач, которая снабжена устройством сцепления зацепляющего типа согласно изобретению, иллюстрируется на фиг. 4. Эта коробка 1 передач, которая устанавливается в транспортном средстве, имеет известный планетарный зубчатый механизм 2 двухсателлитного типа (далее в данном документе называемый первым планетарным зубчатым механизмом) и планетарный зубчатый механизм 3 типа Равиньи (далее в данном документе называемый вторым планетарным зубчатым механизмом). Коробка 1 передач соединяется, через преобразователь крутящего момента (не иллюстрирован), с выходным валом 5 двигателя 4, который является источником движущей силы. Кроме того, коробка 1 передач конфигурируется так, чтобы иметь возможность установки передач с первой скорости для движения вперед по восьмую скорость для движения вперед и передач первой скорости для движения назад и второй скорости для движения, и устанавливает одну из передач в соответствии с целевой скоростью вращения двигателя 4, требуемой движущей силой или т.п.
Первый планетарный зубчатый механизм 2 конфигурируется так, чтобы иметь первое солнечное зубчатое колесо 7, которое соединяется с картером 6, первый внутренний сателлит 8, который зацепляется с первым солнечным зубчатым колесом 7, первый внешний сателлит 9, который зацепляется с первым внутренним сателлитом 8, первое коронное зубчатое колесо 10, которое зацепляется с первым внешним сателлитом 9, и первое водило 12, которое удерживает первый внутренний сателлит 8 и первый внешний сателлит 9, чтобы иметь возможность кручения и орбитального вращения, и соединяется с входным валом 11. Другими словами, первый планетарный зубчатый механизм 2 является дифференциальным механизмом, который имеет три вращающихся элемента, в котором первое водило 12 конфигурируется так, чтобы функционировать в качестве входного элемента, первое солнечное зубчатое колесо 7 конфигурируется так, чтобы функционировать в качестве элемента противодействующей силы, и первое коронное зубчатое колесо 10 конфигурируется так, чтобы функционировать в качестве выходного элемента в случае, когда двигатель 4 выводит движущую силу. Кроме того, поскольку первое солнечное зубчатое колесо 7 соединяется с картером 6, как описано выше, первый планетарный зубчатый механизм 2 функционирует в качестве редуктора скорости.
Второй планетарный зубчатый механизм 3 конфигурируется так, чтобы иметь второе солнечное зубчатое колесо 13 и третье солнечное зубчатое колесо 14, которые размещаются концентрическим образом с входным валом 11, второй внутренний сателлит 15, который зацепляется с третьим солнечным зубчатым колесом 14, второй внешний сателлит 16, который зацепляется со вторым внутренним сателлитом 15 и вторым солнечным зубчатым колесом 13, второе водило 17, которое удерживает второй внутренний сателлит 15 и второй внешний сателлит 16, чтобы иметь возможность поворачивания и орбитального вращения, и второе коронное зубчатое колесо 18, которое зацепляется со вторым внешним сателлитом 16. Другими словами, второй планетарный зубчатый механизм 3 является дифференциальным механизмом, который конфигурируется так, чтобы совместно использовать два вращающихся элемента планетарного зубчатого механизма односателлитного типа и планетарного зубчатого механизма двухсателлитного типа и имеет четыре вращающихся элемента второго солнечного зубчатого колеса 13, третьего солнечного зубчатого колеса 14, второе водило 17 и второе коронное зубчатое колесо 18.
Эти соответствующие зубчатые колеса 7, 8, 9, 10, 13, 14, 15, 16, 18 являются косозубыми зубчатыми колесами, которые могут пресекать формирование ненормального шума во время передачи крутящего момента, и их углы закручивания определяются так, что люфт второго водила 17 выбирается в направлении, в котором соответствующие собачки (описанные позже) отделяются посредством передаваемого крутящего момента, чтобы скорость вращения второго водила 17 уменьшалась во время переключения с второй скорости для движения вперед (описанной позже) на первую скорость для движения вперед.
Также размещается множество механизмов сцепления, которые обеспечивают выборочное зацепление между соответствующими вращающимися элементами первого планетарного зубчатого механизма 2 и соответствующими вращающимися элементами второго планетарного зубчатого механизма 3, и механизмов торможения, которые останавливают любой один из двух вращающихся элементов. В частности, первое сцепление C1 размещается, чтобы соединять первое коронное зубчатое колесо 10 и третье солнечное зубчатое колесо 14 друг с другом, второе сцепление C2 размещается, чтобы соединять входной вал 11 или первое водило 12 со вторым водилом 17, третье сцепление C3 размещается, чтобы соединять первое коронное зубчатое колесо 10 и второе солнечное зубчатое колесо 13 друг с другом, и четвертое сцепление C4 размещается, чтобы соединять первое водило 12 и второе солнечное зубчатое колесо 13 друг с другом. Каждое из этих сцеплений C1, C2, C3, C4 конфигурируется аналогично известному фрикционному сцеплению и может изменять перегрузочную способность по крутящему моменту коробки передач на основе величины управления гидравлическим актуатором.
Первый тормоз B1, который останавливает второе солнечное зубчатое колесо 13, размещается посредством второго солнечного зубчатого колеса 13, соединяемого с картером 6. Аналогично, второй тормоз B2, который останавливает второе водило 17, размещается посредством соединения второго водила 17 с картером 6. Этот первый тормоз B1 конфигурируется аналогично известному фрикционному тормозу. Первый тормоз B1 может управлять тормозной силой, которая действует на второе солнечное зубчатое колесо 13, изменяя перегрузочную способность по крутящему моменту коробки передач. Эта перегрузочная способность по крутящему моменту коробки передач изменяется посредством давления масла управляемого гидравлического актуатора (не иллюстрирован). Второй тормоз B2 является устройством сцепления зацепляющего типа, которое конфигурируется так, чтобы останавливать второе водило 17, вынуждая соответствующие собачки (описанные позже) зацепляться друг с другом и второе водило 17 и картер 6 соединяться друг с другом. Перегрузочная способность по крутящему моменту коробки передач каждого из сцеплений C1, C2, C3, C4 и первого тормоза B1 может управляться посредством электромагнитного актуатора, и средство для этого не ограничивается.
Дополнительно, электронный блок управления (далее - ЭБУ) 19 размещается так, чтобы управлять двигателем 4, каждым устройством сцепления и т.п. ЭБУ 19 конфигурируется так, чтобы иметь микрокомпьютер в качестве своего главного компонента, как в случае с известными ЭБУ. Кроме того, этот ЭБУ 19 конфигурируется так, чтобы принимать входные сигналы от датчиков (не иллюстрированы) и выводить сигналы к двигателю 4 и каждому устройству сцепления на основе входных сигналов, карты и арифметического выражения, которые сохраняются заранее, и т.п. Например, сигналы скорости транспортного средства, которая определяется посредством датчика скорости транспортного средства, и степени открытия акселератора, которая определяется посредством датчика степени открытия акселератора, вводятся в ЭБУ 19. Карта переключения, которая подготавливается заранее и использует скорость транспортного средства и степень открытия акселератора в качестве параметров, как известно, хранится в ЭБУ 19, и передача определяется на основе входных сигналов и карты переключения. Затем, сигнал, соответствующий определенной передаче, выводится для каждого из сцеплений C1, C2, C3, C4 и тормозов B1, B2.
Механизмы сцепления, которые включаются для установки соответствующих передач, иллюстрируются на фиг. 5. "ο" на фиг. 5 показывает состояние зацепления сцепления или тормоза, а "-" показывает состояние выключения сцепления или тормоза. Как иллюстрировано на фиг. 5, первая скорость для движения вперед устанавливается, когда первое сцепление C1 и второй тормоз B2 включаются. Вторая скорость для движения вперед устанавливается, когда первое сцепление C1 и первый тормоз B1 включаются. Третья скорость для движения вперед устанавливается, когда первое сцепление C1 и третье сцепление C3 включаются. Четвертая скорость для движения вперед устанавливается, когда первое сцепление C1 и четвертое сцепление C4 включаются. Пятая скорость для движения вперед устанавливается, когда первое сцепление C1 и второе сцепление C2 включаются. Шестая скорость для движения вперед устанавливается, когда второе сцепление C2 и четвертое сцепление C4 включаются. Седьмая скорость для движения вперед устанавливается, когда второе сцепление C2 и третье сцепление C3 включаются. Восьмая скорость для движения вперед устанавливается, когда второе сцепление C2 и первый тормоз B1 включаются. Первая скорость для движения назад устанавливается, когда второй тормоз B2 и третье сцепление C3 включаются, а вторая скорость для движения назад устанавливается, когда второй тормоз B2 и четвертое сцепление C4 включаются.
Согласно этой конфигурации максимальное передаточное соотношение достигается, когда устанавливается первая скорость для движения вперед, а минимальное передаточное соотношение достигается, когда устанавливается восьмая скорость для движения вперед. Кроме того, передаточное соотношение равно "1", когда устанавливается шестая передача для движения вперед.
Пример управления, касающийся переключения со второй скорости для движения вперед на первую скорость для движения вперед этой коробки 1 передач будет кратко объяснен. Как описано выше, первое сцепление C1 включается при первой скорости для движения вперед и второй скорости для движения вперед. Соответственно, во время переключения на первую скорость для движения вперед второй тормоз B2 включается с выключенным первым тормозом B1 и включенным первым сцеплением C1. В этом случае перегрузочная способность по крутящему моменту коробки передач для первого тормоза B1 и выходной крутящий момент двигателя 4 подвергаются совместному управлению, так что скорость вращения второго водила 17 становится близкой к "0". Затем, второй тормоз B2 включается, и затем первый тормоз B1 полностью выключается.
Для того, чтобы сокращать время, затрачиваемое для включения второго тормоза B2, описанного выше, предпочтительно, чтобы второй тормоз B2 управлялся так, чтобы входить в состояние, непосредственно предшествующее включению, в ходе управления скоростью вращения второго водила 17. Это состояние, непосредственно предшествующее включению второго тормоза B2, означает состояние, когда второй тормоз B2 включается целенаправленно, что принимает во внимание вариацию компонентов или т.п. Кроме того, согласно этой конфигурации, зазор второго водила 17 выбирается в направлении, в котором соответствующие собачки (описанные ниже) отделяются посредством крутящего момента, передаваемого, чтобы скорость вращения второго водила 17 уменьшалась, как описано выше. Соответственно, в случае, когда второй тормоз B2 находится в состоянии, непосредственно предшествующем включению, осевое перемещение второго водила 17 вследствие вибрации или т.п., не должно приниматься во внимание, и зазор соответствующих собачек в этом состоянии определяется как более узкий, чем в состоянии, когда второй тормоз полностью выключен.
Фиг. 1 показывает пример конфигурации, которая предоставляет возможность второму тормозу B2 быть в состоянии, непосредственно предшествующем включению, как описано выше. Этот второй тормоз B2 конфигурируется так, чтобы останавливать второе водило 17 от вращения, предоставляя возможность первому поршню 20 и поворотному элементу 21 сцепляться друг с другом. Первый поршень 20 соединяется с картером 6 неповоротным образом, а поворотная деталь 21 вращается как одно целое со вторым водилом 17.
Первый поршень 20 имеет кольцеобразную форму, и один крайний фрагмент (далее - вставленный фрагмент) 24 первого поршня 20 вставляется между первым цилиндрическим фрагментом 22 и вторым цилиндрическим фрагментом 23. Первый цилиндрический фрагмент 22 в осевом направлении протягивается от боковой поверхности картера 6, а второй цилиндрический фрагмент 23 формируется посредством внешнего периферийного фрагмента сгибаемой боковой поверхности картера 6. Часть 25, которая в осевом направлении протягивается от вставленного фрагмента 24, больше во внешнем диаметре, чем вставленный фрагмент 24, и внешняя периферийная поверхность части 25 и поверхность внутренней стенки картера 6 находятся в шлицевом зацеплении. Другими словами, первый поршень 20 сцепляется с картером 6 неповоротным образом и должен иметь возможность перемещения в осевом направлении.
Кольцевая канавка 26 формируется в боковой поверхности картера 6, так что существует зазор между торцевой поверхностью вставленного фрагмента 24 и боковой поверхностью картера 6 в случае, когда первый поршень 20 перемещается наиболее близко к стороне боковой поверхности картера 6. Канавка 26 и источник давления масла (не иллюстрирован) сообщаются друг с другом через масляный канал. Соответственно, когда масло подается из источника давления масла в канавку 26, нагрузка, основанная на давлении масла, вынуждает первый поршень 20 прижиматься в направлении от боковой поверхности. Другими словами, картер 6 и первый поршень 20 составляют гидравлический актуатор, гидравлический актуатор, который имеет эту конфигурацию, соответствует "прижимающему механизму" согласно примеру изобретения, и первый поршень 20 соответствует "первой детали" согласно примеру изобретения. В последующем описании канавка 26 будет называться гидравлической камерой 26. Первые собачки 27, которые выступают в осевом направлении, формируются в крайнем фрагменте первого поршня 20 на стороне, противоположной вставленному фрагменту 24. Эти первые собачки 27 формируются во множественном числе с заданными интервалами в круговом направлении.
Поворотная деталь 21 соответствует "второй детали" согласно примеру изобретения. Поворотная деталь 21 конфигурируется так, чтобы иметь удерживающую деталь 28, кольцевой второй поршень 29 и упругую деталь 30. Удерживающая деталь 28 соединяется со вторым водилом 17 и имеет имеющую дно цилиндрическую форму. Второй поршень 29 размещается внутри удерживающей детали 28, чтобы иметь возможность перемещения в осевом направлении. Упругая деталь 30 предоставляет возможность упругой силе действовать в направлении, в котором второй поршень 29 отделяется от донной поверхности удерживающей детали 28. Стопорный фрагмент 31, который выступает в осевом направлении, формируется с заданными интервалами в круговом направлении во внешнем периферийном фрагменте донной поверхности удерживающей детали 28. Выступающий фрагмент 32, который зацепляется со стопорным фрагментом 31 в круговом направлении, формируется в одном крайнем фрагменте второго поршня 29. Соответственно, крутящий момент второго водила 17 передается второму поршню 29 через стопорный фрагмент 31. Кроме того, вторые собачки 33, которые выступают в осевом направлении, формируются на боковой поверхности на другой стороне второго поршня 29. Эти вторые собачки 33 формируются во множественном числе с заданными интервалами в круговом направлении. Вторые собачки 33 конфигурируются так, что первые собачки 27 вставляются между соседними вторыми собачками 33.
Как описано выше, прижимающая сила, получающаяся в результате давления масла гидравлической камеры 26, вынуждает первый поршень 20 прижиматься, и соответствующие собачки 27, 33 зацепляться друг с другом. В случае, когда концы зубцов соответствующих собачек 27, 33 находятся в соприкосновении друг с другом, в то время как соответствующие собачки 27, 33 зацепляются друг с другом, упругая деталь 30 сжимается, и вторые собачки 33 движутся в направлении от первых собачек 27. Другими словами, первые собачки 27 и вторые собачки 33 поворачиваются относительно друг друга посредством уменьшения противодействующей силы, действующей на концы зубцов первых собачек 27, и уменьшения силы трения, и затем соответствующие собачки 27, 33 могут зацепляться друг с другом. В иллюстрированном примере стопорное кольцо 34 размещается внутри фрагмента отверстия удерживающей детали 28, так что предотвращается выход второго поршня 29 из фрагмента отверстия удерживающей детали 28. Кроме того, кольцевая позиционирующая деталь 35 для ограничения осевого перемещения удерживающей детали 28 присоединяется к картеру 6, чтобы быть в соприкосновении с донной поверхностью удерживающей детали 28, и зазор выбирается, чтобы приводить удерживающую деталь 28 в соприкосновение с позиционирующей деталью 35, когда крутящий момент передается, так что скорость вращения второго водила 17 уменьшается.
Дополнительно, первая возвратная пружина 36 размещается так, что соответствующие собачки 27, 33 отделяются посредством уменьшения давления масла гидравлической камеры 26. В частности, первая возвратная пружина 36 размещается в состоянии сжатия посредством кольцевого седла 37 пружины, которое соединяется с картером 6 и боковой поверхностью первого поршня 20, и один крайний фрагмент первой возвратной пружины 36 соединяется с седлом 37 пружины. Соответственно, первая возвратная пружина 36 конфигурируется так, чтобы предоставлять возможность упругой силе (противодействующей силе) относительно нагрузки, прижимающей первый поршень 20 на основе давления масла гидравлической камеры 26, действовать на первый поршень 20 все время. Множество первых возвратных пружин 36 может быть размещено с заданными интервалами в круговом направлении седла 37 пружины, как иллюстрировано на фиг. 2, и первые возвратные пружины 36 могут также быть одной кольцевой пружиной.
Дополнительно, вторые возвратные пружины 38 располагаются, чтобы находиться в контакте с боковой поверхностью первого поршня 20 в случае, когда первый поршень 20 перемещается в позицию (заданную позицию), достигнутую непосредственно перед началом зацепления между соответствующими собачками 27, 33, и чтобы сжиматься вместе с первой возвратной пружиной 36 в случае, когда первый поршень 20 дополнительно перемещается для того, чтобы соответствующие собачки 27, 33 зацеплялись друг с другом. Эта вторая возвратная пружина 38 является спиральной пружиной, которая имеет один крайний фрагмент, соединенный с седлом 37 пружины, и короче первой возвратной пружины 36. Кроме того, вторые возвратные пружины 38 могут быть размещены с заданными интервалами в круговом направлении и могут также быть одной кольцеобразной пружиной, как с первой возвратной пружиной 36, описанной выше. Фиг. 2 показывает пример, в котором первые возвратные пружины 36 и вторые возвратные пружины 38 поочередно размещаются в круговом направлении. Фиг. 1 показывает пример, в котором вторая возвратная пружина 38 размещается на внутренней периферийной стороне седла 37 пружины, больше, чем первая возвратная пружина 36. Кроме того, в случае, когда множество первых возвратных пружин 36 размещается в круговом направлении, вторые возвратные пружины 36 могут быть помещены в центральных позициях соответствующих первых возвратных пружин 36. Другими словами, каждая из возвратных пружин 36, 38 может быть помещена так, что центральная ось первой возвратной пружины 36 и центральная ось второй возвратной пружины 38 соответствуют друг другу. Первая возвратная пружина 36 и вторая возвратная пружина 38 соответствуют "механизмам противодействующей силы" согласно примеру изобретения.
Фиг. 3 показывает величину прижимающей силы, которая требуется для того, чтобы первый поршень 20 двигался в направлении от боковой поверхности картера 6. Горизонтальная ось на фиг. 3 представляет величину перемещения первого поршня 20, а вертикальная ось на фиг. 3 представляет величину прижимающей силы. Как иллюстрировано на фиг. 3, в случае, когда первый поршень 20 позиционируется на стороне боковой поверхности картера 6, только упругая сила первой возвратной пружины 36 действует на первый поршень 20. Соответственно, величина увеличения в прижимающей силе, которая требуется, чтобы первый поршень 20 двигался на единичное расстояние, является величиной, эквивалентной модулю упругости первой возвратной пружины 36.
Когда первый поршень 20 перемещается в позицию (заданную позицию), достигнутую непосредственно перед зацеплением соответствующих собачек 27, 33, торцевая поверхность второй возвратной пружины 38 находится в соприкосновении с боковой поверхностью первого поршня 20. Соответственно, чтобы первый поршень 20 дальше перемещался, прижимающая сила, которая требуется для перемещения первого поршня 20, быстро увеличивается, когда каждая из возвратных пружин 36, 38 сжимается. Другими словами, в случае, когда первый поршень 20 перемещается на заданную величину или более, величина увеличения в прижимающей силе, которая требуется, чтобы первый поршень 20 переместился на единичное расстояние, становится величиной, эквивалентной сумме модулей упругости соответствующих возвратных пружин 36, 38. Другими словами, величина увеличения в противодействующей силе относительно перемещения первого поршня 20 во время прижатия первого поршня 20 увеличивается в позиции дальше на стороне поворотной детали 21, чем заданная позиция, по сравнению с величиной увеличения для заданной позиции. Соответственно, величина перемещения первого поршня 20, получающаяся в результате незначительного изменения в прижимающей силе, уменьшается.
Вышеописанная конфигурация второго тормоза B2 предоставляет возможность первому поршню 20 перемещаться в позицию в соприкосновении со второй возвратной пружиной 38 в случае, когда первый поршень 20 прижимается, чтобы добираться до позиции, достигнутой непосредственно перед зацеплением между соответствующими собачками 27, 33. Прижимающая сила, которая требуется в это время, может быть получена на основе величины сжатия первой возвратной пружины 36. Соответственно, в случае, когда второй тормоз B2 включается, давление масла, которое получается, как описано выше, подается в гидравлическую камеру 26 в позицию, где первый поршень 20 находится в соприкосновении со второй возвратной пружиной 38, и затем соответствующие собачки 27, 33 зацепляются посредством дополнительного увеличения давления масла, после того как скорость вращения второго водила 17 уменьшается до скорости вращения, при которой второй тормоз B2 может быть включен.
В случае, когда вторая возвратная пружина 38 сжимается, как описано выше, величина увеличения в противодействующей силе относительно перемещения первого поршня 20 увеличивается, и, таким образом, перемещение соответствующих собачек 27, 33, вызывающее избыточное приближение, может быть пресечено, даже когда прижимающая сила, прижимающая первый поршень 20, чтобы первый поршень 20 приходил в соприкосновение со второй возвратной пружиной 38, изменяется в направлении увеличения. Другими словами, первый поршень 20 может быть остановлен в позиции в соприкосновении со второй возвратной пружиной 38. Соответственно, управление для уменьшения давления масла в соответствии с позицией первого поршня 20 или т.п., так, чтобы пресекать избыточное перемещение первого поршня 20, получающееся в результате инерции первого поршня 20 или т.п., не должно выполняться. Соответственно, в случае, когда первый поршень 20 перемещается в позицию, достигнутую непосредственно перед зацеплением между соответствующими собачками 27, 33, первый поршень 20 может быть прижат с относительно высоким уровнем прижимающей силы, и, таким образом, время, затраченное для перемещения первого поршня 20, может быть сокращено. В результате, реакция сцепления может быть улучшена.
Поскольку датчик для обнаружения позиции первого поршня 20 не должен быть размещен вовсе, и давление масла не должно управляться на основе сигнала такого датчика, управление для перемещения первого поршня 20 в позицию, достигнутую непосредственно перед зацеплением между соответствующими собачками 27, 33, может быть упрощено.
Когда первый поршень 20 перемещается в заданную позицию, определенную заранее, величина увеличения в противодействующей силе относительно перемещения первого поршня 20 может быть больше в позиции дальше на стороне поворотной детали 21, чем заданная позиция, по сравнению с величиной увеличения для заданной позиции. Например, боковые поверхности зубцов для шлицевых зубцов могут быть сформированы так, что скользящее фрикционное сопротивление части, где первый поршень 20 и картер 6 находятся в шлицевом зацеплении, увеличивается.
Кроме того, прижимающий механизм согласно изобретению не ограничивается гидравлическим актуатором. Прижимающий механизм согласно изобретению может быть другим механизмом, таким как электромагнитный актуатор. Кроме того, изобретение не ограничивается конфигурацией, в которой две упругие детали первой возвратной пружины 36 и второй возвратной пружины 38 вынуждают упругую силу действовать на первый поршень 20. В частности, первый поршень 20 может быть прижат посредством одного упругого тела, которое конфигурируется так, чтобы иметь различные модули упругости посредством изменения в диаметре проволоки, эффективном числе витков, диаметре спирали или т.п., так что относительно небольшая упругая сила действует от начала перемещения первого поршня 20 в позицию, достигнутую непосредственно перед зацеплением между соответствующими собачками 27, 33, и относительно большая упругая сила действует, в то время как первый поршень 20 дополнительно перемещается в сторону поворотной детали 21. Кроме того, механизм противодействующей силы согласно изобретению не ограничивается пружиной, и механизм, использующий резину и гидравлический цилиндр, может быть использован взамен. Кроме того, устройство сцепления зацепляющего типа согласно изобретению не ограничивается устройством, которое функционирует в качестве тормоза. Устройство сцепления зацепляющего типа согласно изобретению может функционировать также в качестве сцепления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЗАЦЕПЛЯЮЩЕГО МЕХАНИЗМА С ЗАЦЕПЛЕНИЕМ ЗУБЧАТОГО ТИПА | 2016 |
|
RU2633045C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГЕНЕРИРОВАНИЕМ МОЩНОСТИ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2660326C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ОГРАНИЧЕНИЯ ПУСКОВОГО ТОКА ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 1926 |
|
SU6137A1 |
| ПРИСПОСОБЛЕНИЕ 'К ВЕРТИКАЛЬНОМУ РАСКАТНОМУ | 1970 |
|
SU275690A1 |
| Металлорежущий станок | 1975 |
|
SU858550A3 |
| ТОРМОЗНОЙ ЦИЛИНДР ПРУЖИННОГО АККУМУЛЯТОРА ЭНЕРГИИ | 2012 |
|
RU2605144C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖУЩЕЙ СИЛОЙ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2694387C1 |
| ВАКУУМНЫЙ УСИЛИТЕЛЬ ТОРМОЗНОГО ПРИВОДА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2160200C2 |
| ТРАНСМИССИОННОЕ УСТРОЙСТВО, В ЧАСТНОСТИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА, И СПОСОБЫ УПРАВЛЕНИЯ ЭТИМ УСТРОЙСТВОМ | 1994 |
|
RU2117199C1 |
| Передача с периодическим сцеплением | 1919 |
|
SU2660A1 |
Изобретение относится к устройству сцепления зацепляющегося типа посредством зацепления собачек друг с другом. Устройство сцепления включает первую деталь, вторую деталь, прижимающий механизм и механизм противодействующей силы. Первая деталь снабжена множеством первых собачек. Вторая деталь снабжается множеством вторых собачек. Прижимающий механизм конфигурируется так, чтобы прижимать первую деталь в сторону второй детали. Механизм противодействующей силы конфигурируется так, чтобы формировать противодействующую силу относительно прижимающей силы, прижимающей первую деталь для того, чтобы первые собачки и вторые собачки зацеплялись друг с другом, так что величина увеличения противодействующей силы относительно перемещения первой детали больше в позиции дальше на стороне второй детали, чем в заданной позиции, по сравнению с величиной увеличения для заданной позиции, когда первая деталь прижимается. Достигается улучшение реакции сцепления. 5 ил.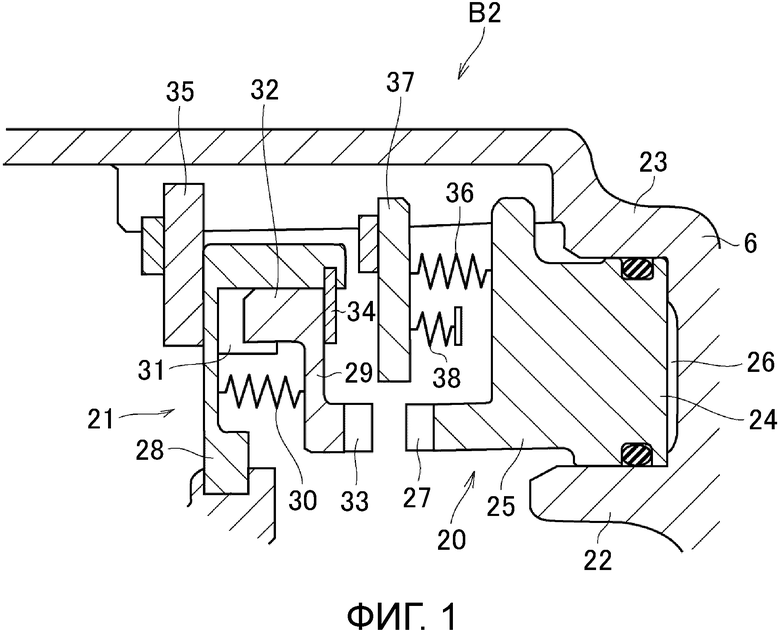
Устройство сцепления зацепляющего типа, содержащее:
первую деталь, имеющую множество первых собачек, причем множество первых собачек размещено с постоянными интервалами в круговом направлении первой детали;
вторую деталь, имеющую множество вторых собачек, при этом множество вторых собачек размещено с постоянными интервалами в круговом направлении второй детали;
прижимающий механизм, выполненный с возможностью прижатия первой детали ко второй детали таким образом, что первые собачки вводятся между вторыми собачками и зацепляются с ними при прижатии первой детали; и
механизм противодействующей силы, выполненный с возможностью генерирования противодействующей силы относительно прижимающей силы, прижимающей первую деталь, чтобы первые собачки и вторые собачки зацеплялись друг с другом,
отличающееся тем, что механизм противодействующей силы содержит первую возвратную пружину и вторую возвратную пружину, причем первая возвратная пружина конфигурируется так, чтобы упругая сила действовала на первую деталь независимо от позиции первой детали, а вторая возвратная пружина конфигурируется так, чтобы обеспечивать прижимающую силу в направлении расцепления первых и вторых собачек, когда первая деталь перемещена в заданную позицию, достигнутую непосредственно перед зацеплением первых и вторых собачек, так что величина увеличения в противодействующей силе по отношению к перемещению первой детали больше в позиции дальше на стороне второй детали, чем заданная позиция, по сравнению с величиной увеличения в заданной позиции, когда первая деталь прижата, причем заданная позиция является позицией, достигнутой до тех пор, пока соответствующие собачки не начнут зацепляться друг с другом после того, как первая деталь прижимается и начинает перемещаться в сторону второй детали.
| DE 102008001197 A1, 22.10.2009 | |||
| JP 2014098459 A, 29.05.2014 | |||
| МУФТА СЦЕПЛЕНИЯ ДВУСТОРОННЕГО ДЕЙСТВИЯ | 1972 |
|
SU426080A1 |
| КУЛАЧКОВАЯ СЦЕПНАЯ МУФТА | 1997 |
|
RU2195588C2 |

