ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Представленное изобретение относится к механизмам для завязывания петель шпагата вокруг больших тюков в форме параллелепипеда, формируемых в прессовальной камере так называемого крупнотюкового пресс-подборщика, а более конкретно относится к сенсорному устройству положения механизма натяжения шпагата для подобных завязывающих механизмов.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Современные большие квадратные пресс-подборщики оборудуют множеством шарнирно установленных, смещаемых вверх рычагов механизма натяжения шпагата иногда называемых рычагами устранения провисания, соответственно связанных с множеством узловязальных узлов (каждый узловязальный узел, описываемый далее, представляет собой узловязальный узел двойной обвязки) для сохранения надлежащего натяжения шпагата, с целью обеспечения, чтобы каждый узловязальный узел работал нормально. Если рычаг механизма натяжения шпагата не может сохранять надлежащее натяжение шпагата, шпагат может быть вытащен из узловязального узла, и возникает сбой увязки.
По мере формирования тюка, рычаги механизма натяжения шпагата, как правило, поворачиваются приблизительно на 30° из первоначального крайнего верхнего положения в крайнее нижнее положение. В конце процесса формирования тюка, каждый рычаг механизма натяжения шпагата должен находиться в самом нижнем крайнем положении, и когда тюк завершен, а узел успешно завязан, каждый рычаг механизма натяжения должен вернуться в самое верхнее крайнее положение. Если какой-либо из рычагов механизма натяжения находится в одном из данных положений в любой момент за исключением начала или окончания цикла завязывания тюка, это означает, что что-то пошло не так, и произошел сбой увязки.
Были сконструированы различные устройства мониторинга увязывания для определения, произошел ли сбой увязки или нет. Например, патент США № 4765235 раскрывает устройство мониторинга увязывания, содержащее верхний и нижний стержни-датчики, которые проходят горизонтально соответственно над и под рычагами механизма натяжения всех узловязателей, при этом каждый из стержней имеет противоположные концы, опирающиеся на шарнирно установленный рычаг. Сила тяжести сохраняет верхний стержень в контакте с верхними частами рычагов механизма натяжения, при этом с каждым из рычагов, несущих нижний стержень, соединена пружина для того, чтобы смещать нижний стержень вверх в контакт с нижними частями рычагов механизма натяжения. На наружном конце одного из рычагов, несущих верхний стержень, и на наружном конце одного из рычагов, несущих нижний стержень, соответственно содержатся магниты, при этом верхний и нижний датчики установлены на раме таким образом, чтобы регистрировать данные магниты для создания сигнала для обработки микропроцессором, только когда рычаги механизма натяжения находятся в своих крайних верхних или нижних положениях. Если микропроцессор определяет, что прием сигнала происходит в момент времени, не являющийся нормальным, в кабине трактора активируется визуальный дисплей, показывающий условное обозначение проверки узловязателя, и звучит звуковая сигнализация. Недостатком данной запатентованной конструкции является то, что отсутствует способ определения, какой узловязатель не вяжет, поскольку, вследствие работы верхнего и нижнего стержней, генерируется только один сигнал для обозначения сбоя увязки в начале формирования тюка и генерируется только один сигнал для обозначения сбоя увязки в конце формирования тюка.
Другой монитор или детектор сбоя увязки на основании микропроцессора, который показывает оператору, какой узловязатель вышел из строя, раскрыт в патенте США № 4753463 (данный детектор сбоя увязки связан с иной и более сложной системой рычагов механизма натяжения, которая раскрыта в патенте США № 4753464), который предоставляет переключатели, находящиеся в вязальном аппарате в таких местах, чтобы они предоставляли сигналы, которые могут обрабатываться таким образом, чтобы дать оператору первое указание, если заданный узловязатель не совершает циклический процесс, и второе указание, если заданный узловязатель не в состоянии завязывать узел. Недостатком данной запатентованной конструкции является то, что: (а) системы рычагов механизма натяжения являются относительно сложными; и (b) оператор не информирован об относительных положениях рычагов механизма натяжения друг относительно друга во время протекания каждого цикла завязывания, результатом чего является то, что оператор не имеет достаточной информации, из которой можно раньше выявлять или диагностировать ожидаемый отказ увязки.
Патент США № 4196661 раскрывает механическое устройство мониторинга сбоя увязки, содержащее множество индикаторов, установленных соответственно на множество рычагов механизма натяжения для перемещения вверх и вниз рычагами механизма натяжения таким образом, чтобы оператор мог определять относительное положение одного рычага механизма натяжения относительно другого во время цикла завязывания. Однако, недостатки данных системы состоят в том, что: (а) оператору, чтобы видеть индикаторы, необходимо смотреть назад, мешая таким образом оператору и отвлекая внимание оператора от других важных операций; и (b) обзору оператора препятствуют такие вещи, как грязное окно кабины и/или облако пыли, которое часто создает пресс-подборщик в процессе операции тюкования. В еще одном варианте осуществления, с рычагами механизма натяжения соответственно связано множество переключателей, которые расположены таким образом, чтобы замыкать и активировать сигнализацию в случае, когда рычаги механизма натяжения передвигаются в положение, свидетельствующее, что произошел сбой увязки.
Таким образом, необходима основанная на микропроцессоре система мониторинга положения рычага механизма натяжения, которая определяет положения рычагов механизма натяжения по мере того, как они передвигаются между верхним и нижним крайними положениями, и которая предоставляет в кабине отображение положений отдельных рычагов механизма натяжения во время циклов завязывания и которая использует данную информацию для прогнозирования сбоев увязки и/или определения, что механизмы механизма натяжения установлены неправильно, а также для определения, когда сбои увязки уже произошли.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно настоящему изобретению, предусмотрен крупнотюковый пресс-подборщик, оборудованный усовершенствованной системой завязывания тюков, содержащей основанную на микропроцессоре систему мониторинга положения рычагов механизма натяжения шпагата, для отображения относительных положений рычагов механизма натяжения и информации о сбое увязки, и/или для извещения оператора о действиях, которые необходимо предпринять.
Целью изобретения является предоставление подобной основанной на микропроцессоре системы мониторинга положения рычагов механизма натяжения, содержащей датчики положения рычагов механизма натяжения, соответственно для генерирования сигналов, связанных с текущими положениями рычагов механизма натяжения во время цикла завязывания и из которых непрерывно отображается визуальная информация, показывающая относительные положения рычагов механизма натяжения.
Дополнительная цель изобретения состоит в том, чтобы предоставить такую систему мониторинга положений рычагов механизма натяжения, как изложено в предыдущей цели, в которой каждый из рычагов механизма натяжения образован простым, шарнирно установленным, смещаемым вверх рычажным узлом, содержащим на своем свободном конце направляющую шпагата, и в которой с каждым рычагом механизма натяжения связан датчик положения рычага для непрерывного мониторинга величины, на которую рычаг механизма натяжения передвигается вниз из верхнего крайнего положения. Во втором варианте осуществления, каждый рычаг механизма натяжения образован рычагом консольного типа, образованным из пружинного проволочного стержня, имеющего пружинный внутренний конец, обеспечивающий смещение рычага вверх.
Данные и другие цели изобретения станут понятны при чтении последующего описания вместе с приложенными чертежами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
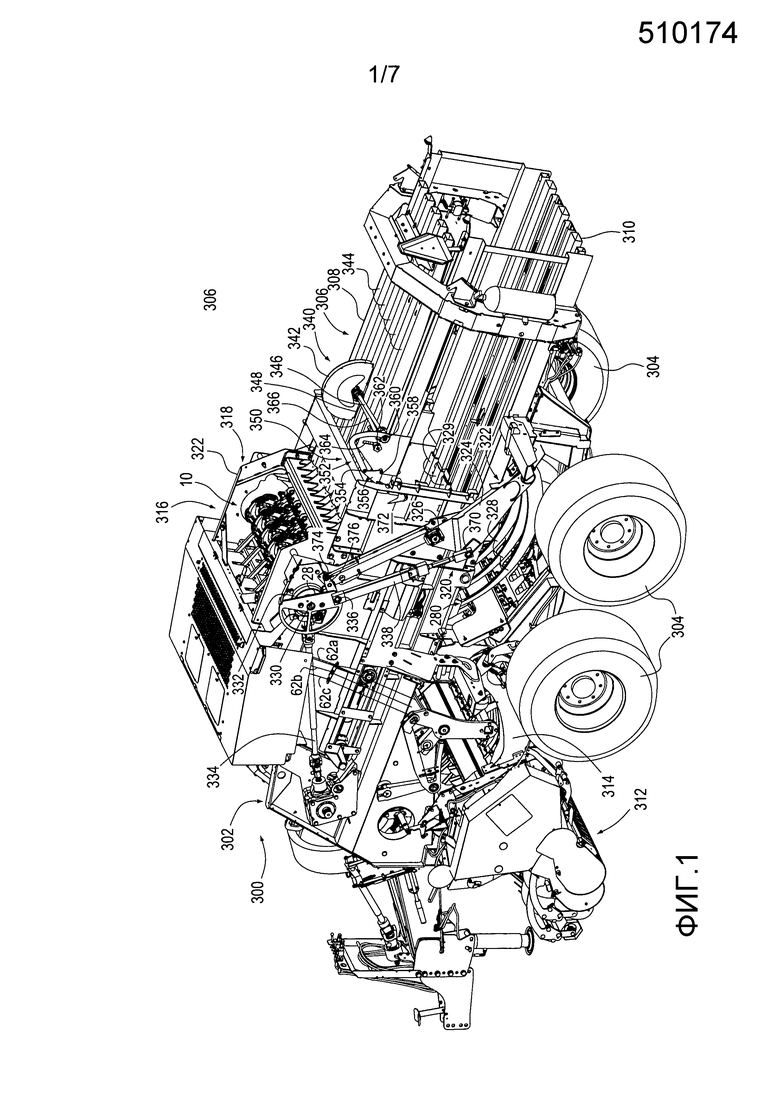
Фиг.1 представляет собой перспективное изображение сзади слева крупнотюкового пресс-подборщика, оборудованного узловязателем, вместе с узлом рычага механизма натяжения шпагата, сконструированным в соответствии с представленным изобретением, с удаленными для ясности боковыми стенками прессовальной камеры.
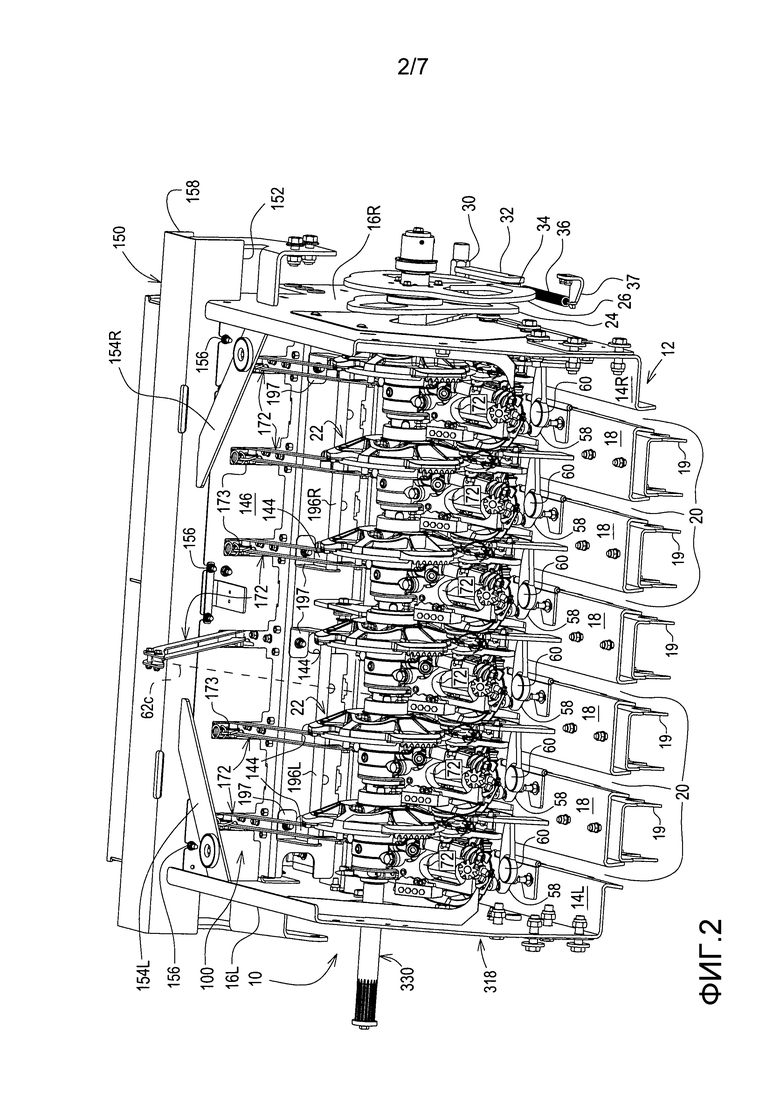
Фиг.2 представляет собой перспективное изображение сзади справа части системы узловязателей и механизма натяжения шпагата, показанных на Фиг.1, и показывающее один из рычагов механизма натяжения в поднятом положении, показывающем, что произошел сбой увязки.
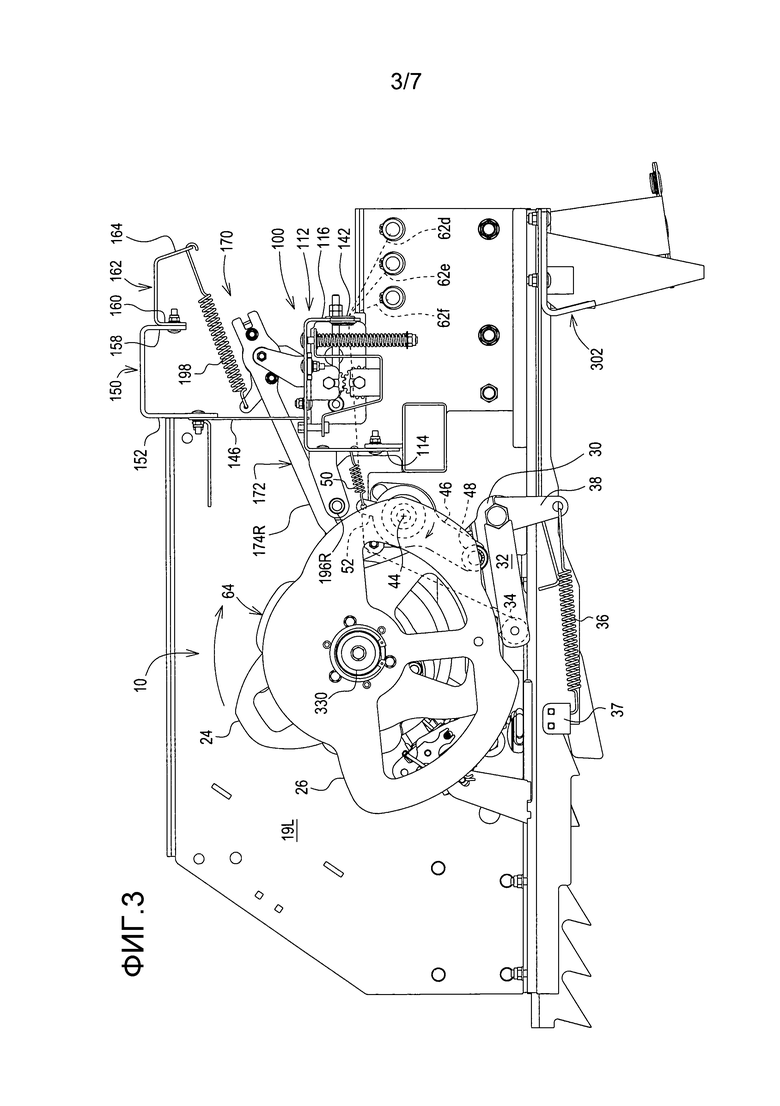
Фиг.3 представляет собой вид сбоку справа с удаленными частями системы узловязателя и механизма натяжения шпагата Фиг.2.
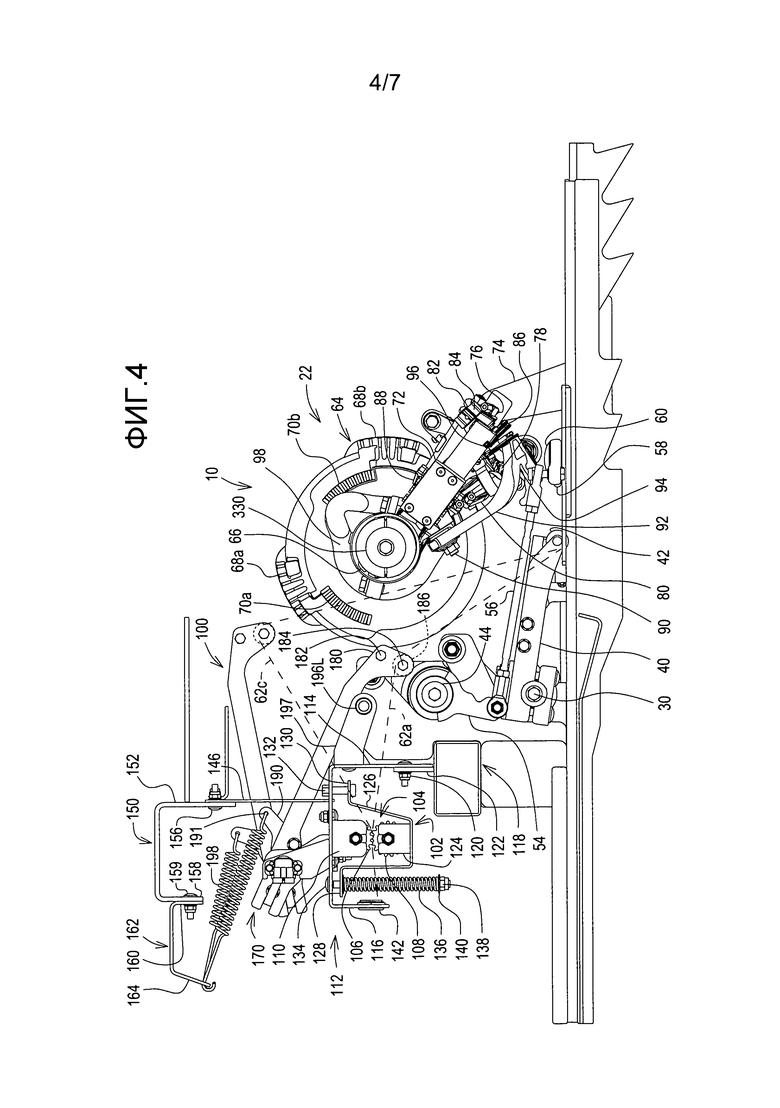
Фиг.4 представляет собой вид сбоку слева, с удаленными частями системы узловязателя и механизма натяжения шпагата Фиг.2.
Фиг.5 представляет собой перспективное изображение справа спереди, показывающее установку одного из рычагов механизма натяжения шпагата вместе с датчиком положения рычага.
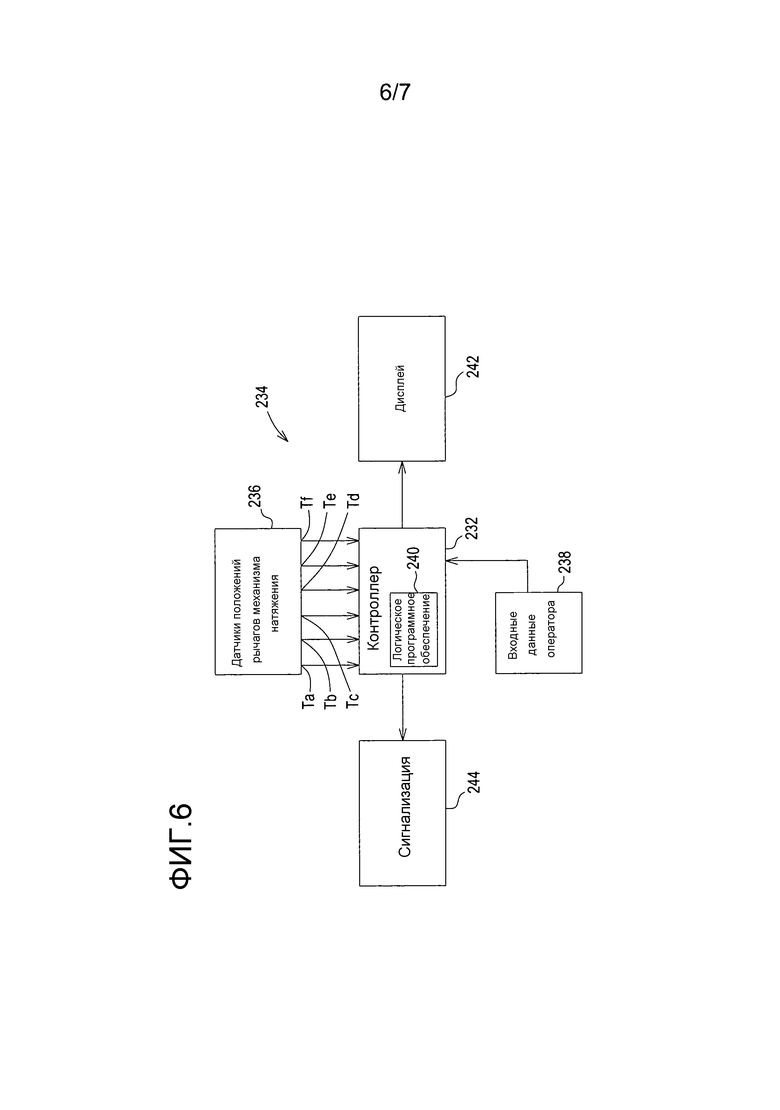
Фиг.6 представляет собой схематичное представление системы мониторинга состояния механизма натяжения шпагата, использующей датчики положения рычагов механизма натяжения по настоящему изобретению.
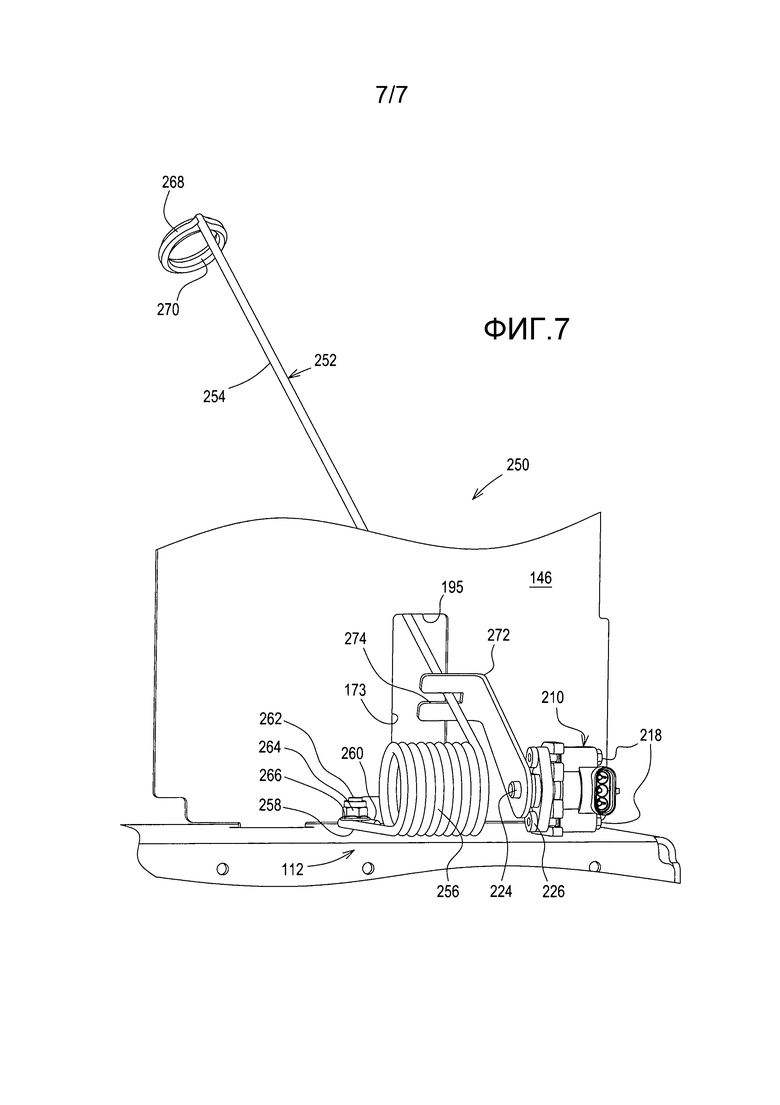
Фиг.7 представляет собой перспективное изображение сзади справа одного из рычажных узлов механизма натяжения, показывающее второй вариант осуществления рычага механизма натяжения.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
Далее со ссылкой на Фиг.1 и 2, показан крупнотюковый пресс-подборщик 300, содержащий главную раму 302, опирающуюся на ходовые колеса 304 для буксирования по полю, содержащему скошенные полосы сельскохозяйственной культуры, подлежащей тюкованию. Главная рама 302 содержит прессовальную камеру 306, проходящую в продольном направлении из передней центральной части пресс-подборщика 300. Прессовальная камера 306 содержит верхнюю и нижнюю стенки 308 и 310, соединенные с правой и левой возвышающимися боковыми стенками.
С расположением впереди и снизу главной рамы 302 предоставлено устройство 312 подбора и кондиционирования сельскохозяйственной культуры, которое подает собранную сельскохозяйственную культуру через лоток 314 для доставки сельскохозяйственной культуры, который изгибается вверх и назад от устройства 312 подбора и кондиционирования и доставляет сельскохозяйственную культуру через отверстие (не показано), предоставленное в нижней стенке 310 прессовальной камеры, откуда ее периодически забирает совершающий возвратно-поступательные движения поршень (не показано) и проталкивает в заднюю часть для формирования спрессованного тюка сельскохозяйственной культуры.
Стол 316 узловязателя содержит систему 10 узловязателя и соответствующую систему 100 механизма натяжения шпагата, как часть системы для завязывания шести петель шпагата вокруг большого тюка в форме параллелепипеда, сформированного в прессовальной камере 306, при этом стоит отметить, что для пресс-подборщиков различных размеров без выхода за пределы принципов представленного изобретения может использоваться стол узловязателя для завязывания разного числа петель шпагата.
Стол 316 узловязателя содержит опорную раму 318, содержащую нижнюю стенку 12, содержащую L-образные правый и левый сегменты 14R и 14L нижней стенки, соответственно образованные изогнутыми внутрь, L-образными участками правой и левой боковых стенок 16R и 16L. Нижняя стенка 12 дополнительно содержит множество центральных сегментов 18 нижней стенки, содержащих открывающиеся вниз, простирающиеся в продольном направлении желобчатый элементы, которые отделены промежутками друг от друга и от коротких сторон сегментов 14R и 14L стенки с образованием шести продольных желобков 20. Центральные сегменты 18 нижней стенки соответственно принимают простирающиеся в продольном направлении, комплементарно образованные желобчатые элементы 19, образующие заднюю область верхней стенки 308 прессовальной камеры, и прикреплены к ним.
Система 320 игл для доставки шпагата содержит опорную раму 322 для игл, содержащую поперечный элемент (не показан), проходящий под прессовальной камерой 306 и имеющий правый и левый рычаги, проходящие вверх рядом с противоположными боковыми стенками прессовальной камеры и соответственно установленные на боковых стенках для поворота вокруг горизонтальной поперечной оси, причем показаны только левый рычаг 324 и шарнирное соединение 326. Шесть проходящих в продольном направлении изогнутых игл 328 для доставки шпагата (видны только три) установлены на одинаковом расстоянии через поперечный элемент рамы 322 таким образом, чтобы иметь соответственное выравнивание для прохождения через шесть желобков 20, когда рама 322 для игл поворачивается вверх из нижнего положения готовности, показанного на Фиг.1, в котором она находится под нижней стенкой 310 прессовальной камеры, в положение доставки шпагата, в котором концевые области игл выступают вверх через желобки 20, при этом стоит отметить, что нижняя стенка 310 прессовальной камеры снабжена шестью желобками 329, которые вертикально выровнены с желобками 16 для того, чтобы обеспечить возможность прохода игл 328.
Центральным составным элементом системы 10 узловязателя является приводной передаточный вал 330 узловязателя, проходящий в поперечном направлении к направлению движения пресс-подборщика. Каждая из противоположных концевых областей приводного вала 330 опирается на подшипниковые узлы (не показано), содержащие корпуса правого и левого подшипников, установленные, соответственно, в правой и левой вертикальных боковых стенках 16R и 16L. На левой боковой стенке 16L установлена система 332 редуктора угловой передачи, содержащая устройство с кулачковой муфтой (не показано, но см. Патент США № 5937746, включенный в данное описание посредством ссылки для типа устройства с кулачковой муфтой, аналогичного устройству, применяемому для осуществления соединения системы 332 редуктора угловой передачи с приводным передаточным валом 330 узловязателя). Первичный приводной вал 334 соединен с первичным валом системы 332 редуктора, при этом приводной передаточный вал 330 узловязателя служит в качестве вторичного вала системы редуктора.
Для управления работой устройства с кулачковой муфтой (не показано) предоставлено устройство 340 измерения длины тюка, которое содержит храповое колесо 342, имеющее зубчатую периферию (зубцы не показаны) и поддерживаемое с возможностью вращения внутри вытянутого в продольном направлении отверстия, предоставленного в центре центрального из пяти удлиненных трубчатых элементов 344, образующих формирующую часть верхней стенки 308 прессовальной камеры, которые выровнены и тянутся назад от элементов 19 верхней стенки, расположенных под столом 316 узловязателя. Храповое колесо 342 прикреплено к правой концевой области приводного вала 346, опирающейся с возможностью вращения на правый и левый кронштейны, расположенные соответственно на противоположных сторонах храпового колеса 342 и прикрепленные к трубчатому элементу 344, причем показан только левый кронштейн 348. Зубцы (не показаны) храпового колеса 342 выступают в прессовальную камеру 306 на расстояние, достаточное для зацепления формируемым тюком, вызывая вращение приводного вала 346 против часовой стрелки, если смотреть на Фиг.1. Приводной вал 346 выступает в поперечном направлении влево от храпового колеса 342 и имеет левую концевую область, установленную с возможностью вращения внутри вертикального опорного кронштейна 349, прикрепленного к верхней области левой боковой стенки прессовальной камеры 306.
Размыкающий механизм 350, только задняя часть которого показана, предоставлен для отключения устройства с кулачковой муфтой (не показано) с целью осуществления включение привода для приводного передаточного вала 330 узловязателя, когда храповое колесо 342 подвергается вращению, соответствующему достижению формируемым тюком предварительно выбранной длины. Размыкающий механизм 350 содержит расцепляющий рычаг 352 с формой перевернутой L, имеющий изогнутый участок, соединенный и выступающий вниз от заднего конца прямого участка, имеющего передний конец, шарнирно установленный, как в шарнирном пальце, 354, в верхний угол треугольного рычага 356, имеющего задний угол, шарнирно установленный, как в шарнирном пальце 358, в опорный кронштейн 349. В левом конце приводного вала 346 установлен фрикционный валик 360 для приведения в движение вследствие вращения храпового колеса 342, при этом изогнутый участок расцепляющего рычага 352 захватывается между правым и левым сегментами фрикционного валика 360 для приведения в движение вверх из первоначального нижнего положения (не показано), определяемого стопором 362, установленным для избирательной фиксации в выбранных положениях внутри вертикальной прорези 364, предоставленной в кронштейне 349 в местоположении для зацепления прямым участком расцепляющего рычага 352. Изогнутый участок расцепляющего рычага 352 изогнут вокруг шарнирного пальца 354, соединяющего расцепляющий рычаг с треугольным рычагом 356, с таким радиусом, чтобы передвижение вверх расцепляющего рычага 352 не передавалось на рычаг 356 до тех пор, пока приводной вал 346 не войдет в выемку (не показано), предоставленную в нижней передней краевой области изогнутого участка, причем это происходит при достижении требуемой длины тюка.
Также для приведения в движение храповым колесом 342 установлен вал 366 управления переключателем, который имеет левый конец, опирающийся с возможностью вращения на кронштейн 349, причем левая концевая область вала 368 поддерживает кулачок (не показано), который действует, чтобы закрывать обычно открытый переключатель (не показано), установленный на кронштейне 349 и имеющий элемент переключателя, зацепляемый кулачком таким образом, чтобы он закрывался одновременно с отключением узла кулачковой муфты для инициирования процесса завязывания, как более полно описано ниже.
Шесть идентичных узловязальных узлов 22 установлены в разделенных равными промежутками местах по длине приводного вала 330. Точно в осевом направлении снаружи боковой стенки 16R на валу 330 установлен кулачковый диск 24 регулировки положения шпагата, а точно в осевом направлении снаружи от кулачкового диска 24 расположен кулачковый диск 26 регулировки пальца шпагата. К крайнему наружному левому концу приводного вала 330 прикреплен рычаг 28 привода иглового узла, который шарнирно соединен, как в шарнирном соединении 336, с верхним концом первого приводного звена 338, имеющего нижний конец, шарнирно соединенный с рычагом 324 опорной рамы для игл посредством шарнирного соединения 370, расположенного под шарнирным соединением 326, соединяющим опорный рычаг 324 для игл с прессовальной камерой. Приводное звено 338 представляет собой первое связующее звено четырехзвенного рычажного механизма, содержащего второе приводное звено 372, имеющее нижний конец, соединенный с рычагом 324 в шарнирном соединении 326, и имеющее верхний конец, шарнирно соединенный, в виде шарнирного соединения 374, с одним концом короткого связующего звена 376, имеющего свой другой конец, шарнирно соединенный с рычагом 28 привода в шарнирном соединении 336.
Далее со ссылкой также на Фиг.3 и 4, можно увидеть, что вал 30 регулировки положения шпагата установлен впереди кулачковых дисков 24 и 26 на высоте непосредственно над верхней стенкой 12 рамы 318 стола узловязателя, при этом противоположные концы вала 30 установлены с возможностью вращения в подшипниках, опирающихся на опорные пластины подшипников (не показано). Рычаг 32 кулачкового следящего элемента соединен с регулировочным валом 30, и выступает назад из него, и несет ролик 34, сцепленный с рабочей поверхностью кулачка, образованной внешней кромкой кулачкового диска 26. Цилиндрическая пружина 36 растяжения натянута между точкой 37 крепления опорной рамы и нижним концом рычага 38, прикрепленного и выступающего вниз из концевой точки с правой стороны вала 30 для того, чтобы удерживать ролик 34 в контакте с рабочей поверхностью кулачка диска 26.
Как видно на Фиг.4, колебательное движение, придаваемое валу 30 регулировки положения шпагата, по мере того, как ролик 34 следует по рабочей поверхности кулачка, образованной кулачковым диском 26, когда приводной вал 330 приводится в движение, передается на шесть расставленных с промежутками в поперечном направлении рычагов 40 регулировки положения шпагата, соединенных и выступающих назад из разделенных равными промежутками предварительно определенных мест вала 30, при этом каждый рычаг 40 имеет на своем заднем конце направляющий ролик 42 шпагата.
Вертикально над регулировочным валом 30 натяжения шпагата установлен регулировочный вал 44 пальца шпагата, который, как и вал 30, имеет противоположные концы, установленные с возможностью вращения в подшипниках, опирающихся на опорные пластины подшипников (не показано). Рычаг 46 кулачкового следящего элемента (см. Фиг.3) соединен и выступает назад из правого концевого местоположения вала 44 и несет работающий по кулачку ролик 48, смещаемый в зацепление с рабочей поверхностью кулачка, образованной кромкой кулачкового диска 24, цилиндрической пружиной 50 растяжения (схематично показанной на Фиг.3), натянутой между точкой крепления опорной рамы и рычагом 52, соединенным и выступающим вверх от вала 44 в местоположении, которое находится непосредственно слева от кулачкового диска 24. Колебательное движение, придаваемое регулировочному валу 44 пальца шпагата, по мере того, как работающий по кулачку ролик 48 следует по рабочей поверхности кулачка, образованной кромкой кулачкового диска 24, когда приводной вал 330 приводится в движение, передается множеству рычагов 54 регулирования пальцев шпагата (только самый левый рычаг виден на раскрытии Фиг.4), соединенных и выступающих вниз из предварительно определенных местоположений вала 44, при этом каждый рычаг 54 имеет нижний конец, шарнирно соединенный с передним концом звена 56 передачи движения, простирающегося назад и задний конец которого универсально соединен с одним концом по существу горизонтального пластинчатого пальца 58 шпагата, установленного в верхней стенке прессовальной камеры для поворота вертикальной оси, образованной установочным болтом 60. Как показано на Фиг. 2 и 3, кулачковый диск 24 расположен таким образом, что регулировочный вал 44 находится в максимальном положении по часовой стрелке, при этом множество рычагов 54 соответственно удерживают множество связующих звеньев 56 в максимально передних положениях, в которых они соответственно удерживают множество пальцев 58 шпагата в максимальных положениях по часовой стрелке вокруг осей множества установочных болтов 60. Когда в своих максимальных положениях по часовой стрелке, пальцы 58 соответственно проходят поперек рядом с продольными желобками 20 в верхней части 12 прессовальной камеры и под соответствующими из шести нитей 62a-62f шпагата, если рассматривать слева направо. Соответственно нити 62a-62f шпагата расположены выровнено с шестью желобками 20 в верхней стенке 12 прессовальной камеры и проходят назад под направляющими шпагат роликами 42 продольно выровненных рычагов 40 регулировки положения шпагата, при этом вертикальные положения направляющих роликов 42 и, следовательно, рычагов 40, определяются расположением рабочей поверхности кулачка кулачкового диска 26, которая находится в зацеплении с роликом 34 рычага 32 с направляющей кулачка.
Как лучше всего можно увидеть на Фиг.2 и 4, каждый узловязальный узел 22 дополнительно содержит в общем круглую ведущую шестерню 64, имеющую встроенную цилиндрическую ступицу 66, установленную на валу 330 и закрепленную на нем шплинтом с возможностью вращения. Левая сторона каждой ведущей шестерни 64 снабжена парой радиально наружных, расположенных по кольцу, выступающих в осевом направлении зубчатых сегментов 68a и 68b шестерни, соответственно, и парой радиально внутренних, расположенных по кольцу, выступающих в осевом направлении зубчатых сегментов 70a и 70b шестерни, соответственно, причем назначение зубчатых сегментов шестерни объясняются ниже.
Каждый узловязальный узел 22 дополнительно содержит раму 72 узловязателя, имеющую верхний конец, образованный состоящим из двух частей цилиндрическим патрубком, устанавливаемым на левой концевой секции ступицы 66 шестерни таким образом, чтобы обеспечить возможность вращения ступицы относительно рамы 72 узловязателя, при этом последняя неподвижно прикреплена к верхней стенке 12 прессовальной камеры посредством вертикального крепежного элемента 74, имеющего нижний конец, прикрепленный к верхней поверхности рядом с одним из сегментов 18 нижней стенки рамы 318 стола 316 узловязателя, при этом нижний конец рамы 72 узловязателя прикреплен к верхней области крепежного элемента 74 штифтом 76.
Формирующие узел составные элементы установлены на раме 72 каждого узловязателя. Как лучше всего можно увидеть на Фиг.4, клюв 78 установлен в нижней части шпинделя клюва, установленного в раме 72 узловязателя, с возможностью вращения вокруг первой наклоненной вверх и вперед оси, причем в верхней части шпинделя установлено коническое зубчатое колесо 80 в местоположении для приведения в движение наружными зубчатыми сегментами 68a и 68b шестерни 14 узловязателя. На раме 32 с возможностью вращения вокруг второй наклоненной вверх и вперед оси установлен шпиндель червячной шестерни, который содержит на своем нижнем конце червячную шестерню 82, сцепленную с ведущей шестерней 84, соединенной с верхним концом шпинделя держателя шпагата, который установлен на раме 72 с возможностью вращения вокруг наклоненной назад и вверх третьей оси, при этом шпиндель имеет многодисковый держатель 86 шпагата, прикрепленный к своему нижнему концу в местоположении позади и непосредственно рядом с клювом 78, причем держатель шпагата удерживает нити шпагата в положении для зацепления клювом 78 в процессе вращения последнего. Верхний конец шпинделя червячной шестерни несет коническое зубчатое колесо 88, расположенное с возможностью зацепления с внутренними зубчатыми сегментами 70a и 70b шестерни 64 узловязателя. В местоположении сверху спереди с обратной стороны рамы 72 узловязателя для поворота вокруг простирающейся вверх и назад оси поворота, образованной шарнирным болтом 90, установлен простирающийся вниз и назад ножевой рычаг 92, имеющий раздвоенный нижний конец, образующий разветвление 94 (Фиг.4), открывающееся вверх в местоположении непосредственно перед клювом 78. В рычаге 92 в местоположении между клювом 38 и держателем 46 шпагата установлен нож 96 для перерезания нитей шпагата в ответ на поперечное качательное передвижение рычага 92 вокруг оси болта 90 в надлежащее время во время цикла завязывания. Подобное передвижение рычага 92, чтобы задействовать нож 96, служит для зацепления проксимальных областей разветвление 94 узлом, формируемым на клюве 78 для сдирания узла с клюва. Качательное передвижение рычага 92 в надлежащее время во время цикла завязывания достигается посредством предоставления рычага 92 с концевым участком (не показан), который простирается в поперечном направлении относительно оси поворота, образованной шарнирным болтом 90, и несет работающий по кулачку ролик (не показан), который вращается в пределах рабочей поверхности 98 кулачка, предоставленной в поверхности ведущей шестерни 64 узловязателя.
Система 100 механизма натяжения шпагата содержит узел 102 механизма натяжения шпагата, связанный с каждым узловязальным узлом 22. Каждый узел 102 механизма натяжения шпагата содержит устройство натяжения шпагата или захват 104, содержащий верхний и нижний рифленые ролики 106 и 108 соответственно. Верхний ролик 106 содержится между и установлен с возможностью вращения на расположенных напротив стойках U-образного кронштейна 110, прикрепленного к нижней поверхности горизонтального, проходящего в поперечном направлении перевернутого желобчатого элемента 112, имеющего заднюю стойку 114 более длинную, чем передняя стойка 116, при этом задняя стойка 114 имеет нижнюю кромку, расположенную рядом с верхней частью поперечной опорной балки 118 и прикрепленную, например, с помощью узлов 120 гаек и болтов, в расставленных с промежутками в поперечном направлении местах поперечного вертикального фланца 122, перекрывающего нижнюю область стойки 114 и приваренного к верхней части балки 118. Ребра нижнего ролика 108 находятся в зацеплении с ребрами верхнего ролика 106, при этом он содержится между и установлен с возможностью вращения на противоположных стойках U-образного кронштейна 124, установленного в верхней поверхности U-образного опорного приспособления 126, имеющего противоположные, выступающие вверх стойки, оканчивающиеся спереди и сзади установочных фланцев 128 и 130 соответственно. Пара установленных с промежутками в поперечном направлении направляющих болтов 132 (виден только один) простирается вертикально через выровненные в осевом направлении отверстия, предоставленные в перевернутом желобчатом элементе 112 и заднем установочном фланце 130. Вторая пара расставленных с промежутками в поперечном направлении направляющих болтов 134 (виден только один), значительно более длинных, чем направляющие болты 132, простирается вертикально через выровненные в осевом направлении отверстия, предоставленные в желобчатом элементе 112 и переднем установочном фланце 128, при этом цилиндрическая пружина 136 сжатия установлена по длине каждого из болтов 128, простирается под передним установочным фланцем 128 и сжимается гайкой 138, прикрученной на нижнем конце болта 134 и воздействующей на шайбу 140, сцепленную с нижней частью пружины 136. Соответственно рифленые ролики 106 и 108 податливо смещаются в зацепление друг с другом для того, чтобы сохранять противодействие длине шпагата, натягиваемого назад через зону зажима сцепленных роликов 106 и 108, как известно в данной области техники.
Передняя стойка 116 перевернутого желобчатого элемента 112 простирается в поперечном направлении позади множества пар рифленых роликов 106 и 108 и содержит множество круглых направляющих 142 шпагата, соответственно выровненных с зонами зажима множества пар роликов 106 и 108. С каждой парой рифленых роликов 106 и 108 связана одна из нитей 62a-62f шпагата, при этом каждая нить шпагата проходит вперед через соответствующую одну из направляющих 142 шпагата, затем в поперечном направлении через соответствующие направляющие шпагата, предоставленные в боковых пластинах пресс-подборщика, а затем соединяется с подающим рулоном (не показано), расположенным в ящике для шпагата, расположенном в боковом местоположении пресс-подборщика. Соответственно назад от множества пар роликов 106 и 108 простираются множество нитей 62a-62f шпагата, причем каждая из последних тянется назад через выровненную прорезь 144 (см. Фиг.2), предоставленную в нижней кромке задней стойки 114 желобчатого элемента 112.
Перевернутый желобчатый элемент 112 снабжен множеством поперечных желобков в области, расположенной впереди задней стойки 114, а вертикальная, простирающаяся в поперечном направлении пластина 146 имеет нижнюю кромку, снабженную множеством выступов, расположенных в желобках. Второй простирающийся в поперечном направлении перевернутый желобчатый элемент 150 имеет противоположные концы, соответственно простирающиеся наружу за пределы боковых стенок 19R и 19L, причем задняя желобчатая стойка 152 упирается и приварена к области ступеньками вниз каждой боковой стенки 16R и 16L. Между задней желобчатой стойкой 152 и правой и левой боковыми стенками 16R и 16L приварены правая и левая горизонтальные, диагональные распорки 154R и 154L. Задняя желобчатая стойка 152 перекрывает верхнюю область пластины 146, содержащей расположеныне с промежутками в поперечном направлении прорези, причем с прорезями выровнены отверстия в стойке 152, а болты множества узлов 156 из гаек и болтов вставлены сквозь выровненные отверстия и прорези и принимают затянутые гайки, прикрепляя посредством этого желобчатый элемент 150 к пластине 146. Передняя стойка 158 желобчатого элемента 150 короче, чем задняя стойка 152, при этом к передней стойке 158, например, с помощью множества узлов 159 из гаек и болтов, прикручена болтами задняя стойка 160 третьего проходящего в поперечном направлении перевернутого желобчатого элемента 162 (Фиг.4), имеющего изогнутую вперед под углом переднюю стойку 164, содержащую множество разделенных промежутками в поперечном направлении отверстий 166 (Фиг.5), назначение которых описано ниже.
Далее со ссылкой также на Фиг.5, можно увидеть, что каждый узел 102 механизма натяжения шпагата дополнительно содержит рычаг механизма натяжения шпагата или узел 170 рычага устранения провисания, установленный на верхней поверхности первого перевернутого желобчатого элемента 112 в местоположении вертикально над соответствующим захватом 104 шпагата. Каждый узел 170 рычага механизма натяжения содержит вытянутый, расположенный продольно рычаг 172 механизма натяжения, который выступает назад через выемку 173, предоставленную в вертикальной поперечной пластине 146 таким образом, чтобы она простиралась вверх от нижней кромки пластины. Рычаг 172 механизма натяжения образован из пары идентичных параллельных, вытянутых планок 174R и 174L, при этом каждая планка содержит поперечное сквозное отверстие 176 для корпуса подшипника, расположенное перед передним концом планок 174R и 174L, и содержит переднюю кромку, снабженную открывающейся вперед выемкой 178, назначение которой объяснено ниже. Задний конец каждой планки 174R и 174L снабжен выступающей вниз задней концевой областью или секцией 180 (см. Фиг.4), причем концевые области 180 планок разделены промежутком с параллельным взаимным расположением и соединены вместе верхним поперечным штифтом 182 и нижним поперечным штифтом 184, на котором установлен направляющий шпагат ролик 186. Корпус 188 подшипника установлен между передними концевыми областями планок 174R и 174L и содержит участки, проходящие в сквозные отверстия 176, при этом корпус подшипника 188 содержит фланец, к которому прикреплены планки с помощью резьбового крепежного приспособления (не показано), проходящего через выровненные отверстия, предоставленные в планках и фланце. Рычаг 172 механизма натяжения содержит короткий рычаг 190, который выступает вверх из нижнего участка, помещенного посередине между фланцем корпуса подшипника и левой планкой 174L, и удерживается на своем месте резьбовым крепежным приспособлением, при этом в верхней области рычага 190 предоставлено установочное отверстие 191 для смещающей пружины с целью, объясненной ниже. Для поддержки переднего конца каждого рычага 172 механизма натяжения с возможностью поворота от перевернутого желобчатого элемента 112 предоставлена параллельная пара размещенных с промежутками в поперечном направлении вертикальных опорных стоек 192R и 192L, имеющих верхние концевые области, расположенные на противоположных сторонах участков корпуса подшипника, которые установлены в сквозных отверстиях 176 планок 174R и 174L, при этом верхние области опорных стоек снабжены соответствующими отверстиями, расположенными в осевом выравнивании с поперечным цилиндрическим отверстием, проходящим через корпус подшипника, при этом подшипник (не показано) запрессован в отверстие. В выровненных отверстиях в стойках 192R и 192L и подшипнике, предоставленном в корпусе 188 подшипника установлен болт (не показано), который удерживается на своем месте гайкой 194, причем болт служит в качестве оси, вокруг которой рычаг 172, вместе с корпусом 188 подшипника и подшипником, может поворачиваться между крайним верхним положением, в котором рычаг 172 входит в зацепление с верхним упором, образованным верхней кромкой 195 прорези 173, и крайним нижним положением, в котором рычаг входит в зацепление с нижним упором, образованным правой и левой выровненными в осевом направлении трубками 196R и 196L, простирающимися между и имеющими противоположные концы, закрепленные внутри, выступающих назад стоек правой и левой пар L-образных кронштейнов 197, имеющих передние стойки, прикрепленные к задней поверхности стойки 114 перевернутого желобчатого элемента 112. Каждый рычаг 172 механизма натяжения смещается в направлении своего крайнего верхнего положения цилиндрической пружиной 198 растяжения, имеющей крюк на своем переднем конце, установленный в соответствующем одном из отверстий 166, предоставленных в стойке 164 желобчатого элемента 162, и имеющей крюк на своем заднем конце, установленный в отверстии 191, предоставленном в верхнем местоположении в установочном рычаге 190.
Сенсорный узел 200 положения рычага механизма натяжения предоставлен для определения положения, которое рычаг 172 механизма натяжения занимает в процессе операции завязывания. Конкретно, сенсорный узел 200 содержит вертикальную опорную стойку 202 датчика, расположенную параллельно и отделенную промежутком влево от опорной стойки 192L, при этом опорная стойка 202 содержит открывающееся вперед среднее гнездо 204, расположенное между открывающимися вперед верхним и нижним гнездами 206 и 208, при этом среднее гнездо больше, чем верхнее и нижнее гнезда 206 и 208. Сенсорный узел 200 дополнительно содержит вращающийся потенциометр 210, содержащий корпус 212, имеющий верхний и нижний монтажные приливы 214 и 216, соответственно снабженные горизонтальными установочными отверстиями, каждое из которых содержит установочный болт 218, вставленный с левых концов каждого из приливов 214 и 216, при этом болты 218 установлены в верхнем и нижнем гнездах 206 и 208 и выступают через выровненные отверстия, предоставленные в прижимной пластине 220, имеющей левую сторону, сцепленную с правой стороной опорной стойки 202. Корпус 212 дополнительно содержит цилиндрическую концевую секцию 222, расположенную в центре между приливами 214 и 216 и установленную в среднем гнезде 204. Горизонтальный вал 224 датчика установлен с возможностью вращения внутри корпуса 212, проходит через центр концевой секции 222 и выступает вправо из корпуса 212 и свободно встает в отверстие, предоставленное в центре через прижимную пластину 220. C-образный элемент 226 имеет резьбовые отверстия в противоположных концах, при этом элемент 226 расположен с отверстиями, соответственно выровненными и принимающими резьбовые концы болтов 218, предоставленных в верхнем и нижнем приливах 214 и 216, при этом болты 218 ввинчивают в отверстия, результатом чего является то, что C-образный элемент 226 плотно входит в зацепление с прижимным элементом 220 напротив правой стороны опорной стойки 202 и, соответственно, прикрепляет датчик 210 к опорной стойке, при этом, когда датчик 210 правильно установлен в опорной стойке 202, вал 224 датчика находится в осевом выравнивании с осью поворота соответствующего рычага 170 механизма натяжения.
L-образный следящий механизм 228 рычага натяжения имеет первую стойку, снабженную шлицованным отверстием, установленным на шлицованной правой концевой области (не показано) вала 224 датчика, при этом второй конец следящего механизма 228 установлен в выемке 178, предоставленной в переднем конце левой планки 174L рычага 172 механизма натяжения. Соответственно, по мере того, как рычаг 172 механизма натяжения поворачивается, поворотное движение рычага будет передаваться следящим механизмом 228 на вал 224 датчика, в результате чего генерируется электрический сигнал, который отображает угловое положение рычага, при этом стоит отметить, что потенциометр 210 содержит электрическое гнездо 230 для приема электрического штепселя, имеющего соответствующие заземляющий и силовой провода для приведения потенциометра в действие, и провод для передачи генерируемого сигнала в программируемый электрический контроллер 232 (см. Фиг.6).
Необходимо заметить, что, в дополнение к узлу 202 механизма натяжения шпагата и узлу 170 рычага механизма натяжения шпагата или устранения провисания, аналогичные узлы предусмотрены под номером 280 под прессовальной камерой 306 для поддерживания и мониторинга натяжения в шести нитях шпагата, соответственно, простирающихся между источниками нитей шпагата и шестью иглами 328 для доставки шпагата. Данные узлы не показаны дополнительно, ради краткости, достаточно сказать, что они действуют аналогично описанным узлам.
Далее со ссылкой на Фиг.6, можно увидеть, что контроллер 232 образует часть электрического контура 234 мониторинга состояния завязывания шпагата, при этом контроллер 232 соединен для приема входных сигналов, выводимых соответственно шестью вращающимися потенциометрами 210 для определения положения соответственно шести рычагов 172 механизма натяжения шпагата, причем потенциометры показаны объединенными вместе в функциональный блок 236, маркированный «Датчики положения рычагов механизма натяжения». Устройства вывода шести вращающихся потенциометров, связанных с шестью рычагами механизма натяжения шпагата (не показано), расположенными в нижней части прессовальной камеры, аналогичным образом будут соединены с контроллером 232, но опущены с целью упрощения. Соответствующие сигналы, выводимые датчиками положения рычагов механизма натяжения, обозначены Ta-Tf и соответствуют сигналам, генерируемым при соответствующих передвижениях рычагов 172 механизма натяжения шпагата, соответственно связанных с первыми нитями 62a-62f шпагата. Также, ввод в контроллер 232 информации обеспечивает устройство 238 ввода оператора, такое как клавишное устройство для данных и тому подобное, которое может применяться для ввода информации для прогнозирования сбоев увязки из выявленных положений рычагов механизма натяжения. В качестве альтернативы, или в дополнение, в контроллере 232 может сохраняться информация логического программного обеспечения, разработанного для прогнозирования возможных сбоев увязки из выявленных положений рычагов натяжения, как обозначено под номером 240. Контроллер 232 использует информацию, которую он принимает для генерирования входных сигналов для дисплея 242 для освещения устройства отображения, расположенного в кабине буксируемого транспортного средства, свидетельствующего о сбое увязки или возможном сбое увязки в определенной петле нити шпагата. В случае, если ожидается сбой увязки, программное обеспечение 240 может инициировать сигнал, подлежащий отправке на дисплей 242, чтобы вызвать включение индикатора «проверки натяжения шпагата», и тому подобное. Контроллер 232 также может генерировать входные сигналы устройства 244 звуковой сигнализации, свидетельствующие, что произошел или вероятно возникновение сбоя увязки.
Ниже изложено функционирование изобретения.
Предварительно следует отметить, что, для краткости, опущены иллюстрации различных стадий завязывания двойных узлов в каждой из петель шпагата, используемых для скрепления вместе завершенных тюков. Для помощи в понимании, как завязывают двойные узлы, может иметься ссылка на каждый из патентов США №4074623 и №4765235, которые содержат нарисованные фигуры, иллюстрирующие различные стадии при формировании двойных узлов, при этом ‘623 патент включен в данное описание посредством ссылки во всей своей полноте, а Фиг.1-10 и «Механические Аспекты» ПОДРОБНОГО ОПИСАНИЯ, содержащиеся в колонках 3-7 ‘235 патента включены в данное описание посредством ссылки.
Предполагая, что пресс-подборщик задействован с устройством 312 подбора и кондиционирования сельскохозяйственной культуры, доставляющим сельскохозяйственную культуру в прессовальную камеру 306 для прессования в тюки, и что тюк требуемой длины почти что завершен в прессовальной камере 306, приводной передаточный вал 330 узловязателя будет находиться в невращающемся состоянии, при этом ведущие шестерни 64 узловязателя находятся в положении готовности. Формируемый тюк будет оказывать натяжение на нити шпагата, обматываемые вокруг задней стороны формируемого тюка, при этом данные нити шпагата включают первые нити 62a-f шпагата и соответствующее число вторых нитей шпагата, которые соответственно были связаны с первыми нитями в конце предыдущего цикла завязывания, при этом стоит отметить, что узлы, связывающие вторые нити шпагата с первыми нитями шпагата, расположены в верхнем заднем углу формируемого тюка, при этом вторые нити проходят вниз через прессовальную камеру в нижнюю часть тюка, откуда они проходят вперед через концы шести игл 328, расположенных в положении готовности под прессовальной камерой, а оттуда через рычаги механизма натяжения (не показано) нижнего узла рычага механизма натяжения, затем через точки прижима сцепленных рифленых роликов нижнего узла механизма натяжения шпагата, аналогичного узлу 102, и оттуда в мотки шпагата, содержащиеся в пресс-подборщике.
Когда тюк почти завершен, рычаги 172 механизма натяжения шпагата, как правило, будут находиться в своих соответствующих крайних нижних положениях, в которых они опираются на трубки 196R и 196L, образующие нижний ограничитель. Шесть вращающихся потенциометров 210 для определение положений соответственно шести рычагов 172 механизма натяжения будут посылать соответственно аналогичные сигналы Ta-Tf в контроллер 232, который, в свою очередь, будет посылать соответствующие сигналы на дисплей 242, вызывая отображение относительных положений шести рычагов 172 механизма натяжения, которые в данном случае будут показывать, что каждый рычаг идентично и правильно отклонен за счет натяжения первых нитей 62a-62f шпагата.
В то время, когда тюк почти завершен, передвижение назад тюка, сформированного в прессовальной камере 306, вызовет вращение храпового колеса 342 устройства 340 измерения длины тюка, в результате чего фрикционный валик 360 приводит расцепляющий рычаг 352 размыкающего механизма 350 в движение вверх. Как только длина тюка достигает требуемой длины, выемка изогнутой свисающей стойки рычага 352 обеспечит возможность передвижения рычага назад и передачи движения, отключающего кулачковую муфту (не показано), связанную с ортогональным редуктором 332, для того, чтобы вызвать соединение первичного приводного вала 334 для приведения в действие приводного передаточного вала 330 узловязателя и соответствующих шестерней 64 узловязателя против часовой стрелки, если смотреть на Фиг.4. Также, вращение вала 330 будет заставлять иглы 328 поворачиваться вверх вокруг оси поворота, образованной шарнирным соединением 326 и соответствующим соединением на противоположной стороне прессовальной камеры.
Данное вращение шестерней 64 узловязателя будет вызывать работу шести узловязальных узлов 22 таким образом, чтобы каждый осуществлял завязывание двух узлов, хорошо известным образом, кратко описанным ниже и четко описанным и проиллюстрированным в упомянутых выше патентах США №4074623 и №4765235. В то время, когда начинается вращение, шестерни 64 узловязателя и кулачковые диски 24 и 26 будут находиться в своих соответствующих положениях готовности, проиллюстрированных на Фиг.2-4, причем пальцы 58 шпагата показаны в полностью повернутых по часовой стрелке положениях, в которых они расположены поперек соответствующих продольных желобков 20. После того, как начинается вращение приводного передаточного вала 330 узловязателя, кулачковый диск 24 будет быстро вращаться таким образом, чтобы следящий ролик 48 рычага 46 кулачкового следящего элемента двигался наклонно внутрь в направлении вала 330, причем результатом данного передвижения является вращение регулировочного вала 44 пальца шпагата против часовой стрелки, если смотреть на Фиг.4, соответственно вызывающее передвижение рычагов 54 и звеньев 56 передачи движения назад, в результате чего пальцы 58 шпагата вращаются против часовой стрелки (Фиг.2) вокруг валов 60, причем затем пальцы 58 находятся в положении готовности, в котором они располагаются соответственно слева от желобков 20.
Приблизительно первые 180° вращения вала 330 передается на рычаг 28 привода узла игл (см. Фиг.1), вызывая одновременный поворот по часовой стрелке шести несущих шпагат игл 328 для того, чтобы передвигать иглы из их положения готовности под прессовальной камерой, как показано на Фиг.1, вверх через прессовальную камеру 306, проходя сперва через соответствующие продольные желобки 329, предоставленные в нижней стенке 310 камеры, и в заключение через желобки 20.
В период времени перед поворотом игл на расстояние, достаточное для того, чтобы выступать вверх через продольные желобки 20 в верхней стенке 12 прессовальной камеры 306, кулачковый диск 26 поворачивается в положение, обеспечивающее возможность подъема рычага 32 следящего механизма (см. Фиг.3), заставляющего рычаги 40 регулировки положения шпагата (см. Фиг.4) также подниматься в достаточной степени для предоставления зазора для того, чтобы иглы 328 передвигались мимо направляющих роликов 42, располагая в то же время первые нити 62a-f для зацепления иглами и доставки в выемки в держателях 86 шпагата вместе со вторыми нитями, находящимися на концах игл 328, причем данные вторые нити висходят из рычагов механизма натяжения (не показано), расположенных под прессовальной камерой.
Между тем, шесть ведущих шестерней 64 повернуться приблизительно на 180°, при этом первые внутренние зубчатые сегменты 70a входят в зацепление и приводят в движение конические зубчатые колеса 88 немного перед тем, как наружные зубчатые сегменты 68a входят в зацепление и приводят в движение конические зубчатые колеса 80. Приведение в движение конических зубчатых колес 88 соответственно приводит в движение червячные шестерни 82, которые, в свою очередь, приводит в движение шестерни 84 для того, чтобы вращать держатели 86 шпагата, заставляя их захватывать и скреплять пары первых и вторых нитей шпагата, с приведением в движение конических зубчатых колес 80, в результате чего клювы 78 вращаются, завязывая первые узлы в парах первых и вторых нитей шпагата. Данному связыванию способствует то, что по существу одновременно с вращением клювов 78, кулачковый диск 24 будет воздействовать посредством работающего по кулачку ролика 48 и рычага 46, заставляя регулировочный вал 44 пальца шпагата вращаться таким образом, чтобы передвигать связующие звенья 56 вперед, заставляя пальцы 58 шпагата поворачиваться из их положений готовности для того, чтобы зацеплять вторые нити шпагата и отклонять их к клювам 78. В то время, как происходит данное связывание, продолжающееся вращение приводного вала 330 заставляет иглы 328 передвигаться назад в направлении их положений готовности под прессовальной камерой. Одновременно, та часть каждой из рабочих поверхностей 98 кулачков ведущей шестерни, заставляющая рычаги 92 ножей поворачиваться, соответственно зацепляется роликами, перемещаемыми рычагами 92. Данный поворот рычагов 92 передвигает ножи 96 соответственно поперек пары первой и второй нитей в местах между завязанными первыми узлами, которые удерживаются клювами 78, и держателями 86 шпагата, отрезая посредством этого узлы от каждой пары первой и второй нитей. Данное движение рычагов 92 также приводит к тому, что завершенные первый узлы срываются с клювов 78, при этом завершенные петли, содержащие первые узлы и вторые узлы, связанные в процессе предыдущего цикла завязывания, падают на завершенный тюк.
В то время как первые узлы падают вслед за отрезанием, нити 62a-f шпагата и соответствующие вторые нити шпагата удерживаются держателями 86 шпагата. Следовательно, по мере того, как иглы продолжают втягиваться, вторые нити свисают вниз поперек камеры тюка в то время, как кулачковый диск 24 вращается, заставляя вал 30 регулировки положения шпагата вращаться, чтобы заставить рычаги 40 регулировки положения шпагата поворачиваться вниз, соответственно располагая направляющие шпагат ролики 42 таким образом, чтобы первые нити 62a-f шпагата проходили рядом со вторыми нитями шпагата, проходящими между концами извлекаемых игл и держателями 86 шпагата. Перед данным передвижением рычагов 40, кулачковый диск 26 поворачивается, заставляя регулировочный вал 44 пальца шпагата вращаться для осуществления передвижения пальцев 58 шпагата в их соответствующие положения готовности рядом с продольными желобками 20, но вслед за передвижением рычагов 40 вниз, кулачковый диск 26 снова поворачивается в положение, заставляющее пальцы 58 шпагата поворачиваться таким образом, чтобы зацеплять первую и вторую пары нитей шпагата и размещать их напротив клювов 78. В данный момент времени, продолжающееся вращение ведущих шестерней 64 вводит вторые внутренние зубчатые сегменты 70b шестерни и вторые наружные зубчатые сегменты 68b шестерни в зацепление соответственно с коническими зубчатыми колесами 88 и 80 для того, чтобы заставить клюв 78 поворачиваться для завязывания второго узла и чтобы вызвать поворот держателя 86 шпагата в его первоначальное положение готовности. Когда второй узел завершен, рабочая поверхность 98 кулачка располагается, чтобы заставить рычаг 92 ножа поворачиваться, чтобы отрезать узлы от держателей 86 и чтобы содрать их с клювов 78. Данный узел становится первым узлом, который соединяет первые нити 62a-f шпагата и соответствующие вторые нити шпагата, образуя посредством этого новые петли, которые при их создании принимают форму открытых изгибов, расположенных поперек прессовальной камеры для перехвата новых партий сельскохозяйственного материала по мере того, как они спрессовываются о предшествующий завершенный и завязанный тюк, что хорошо известно. В это время, происходит потеря натяжения нитей, связанных вместе вторым узлом, и все рычаги 172 механизма натяжения повернутся в положение максимально вверх, причем данное положение представляет собой положение, занимаемое третьим с левой стороны рычагом 172 механизма натяжения, показанным на Фиг.2, например, при этом стоит отметить, что верхний конец 195 направляющей прорези 173 служит в качестве верхнего упора.
В процессе формирования следующего тюка, натяжение связанных вместе нитей шпагата будет увеличиваться, заставляя рычаги 172 механизма натяжения передвигаться в положение максимально вниз, занимаемое всеми, кроме упомянутого выше третьего с левой стороны рычага механизма натяжения, при этом величина хода рычагов 172 между крайними верхним и нижним положениями составляет приблизительно 40°.
Если рычаги 172 находятся в одном из данных крайних положений кроме как в начале и в конце формирования тюка, это показывает, что что-то пошло не так, и произошел сбой увязки. В случае сбоя увязки при завязывании первых узлов, натяжение в несвязанной одной из первых нитей 62a-f будет потеряно, в результате чего рычаг 172 механизма натяжения, который связан с несвязанной первой нитью, передвигается соответствующей пружиной 198 натяжения в свое крайнее верхнее положение. Например, если нить 62c не связана, рычаг 172, связанный с нитью 62c, будет передвигаться в крайнее верхнее положение, показанное на каждой из Фиг. 2 и 4. Поскольку данное положение является аномальным от того, что должно иметь место сразу после того, как завязываются первые узлы, контроллер 232, при приеме сигнала из соответствующего потенциометра 210, будет посылать сигнал, вызывающий отображение на дисплее 242 положение рычага 172 механизма натяжения, соответствующего несвязанной нити 62c относительно положений рычагов 172 механизма натяжения, соответственно связанных с остальными первыми нитями 62a-b и 62d-f шпагата. В то же самое время, контроллер 232 использует информацию об относительном положении рычага механизма натяжения для активации дисплея, показывая, что оператор должен проверить узловязатель, связанный с нитью 62c шпагата. В дополнение, может включаться звуковая сигнализация, предупреждающая оператора, что произошел сбой увязки.
В ответ на выявленные положения или относительные положения рычагов 172 механизма натяжения также может действовать логическое программное обеспечение 240 для отправки сигналов на дисплей 242 для направления оператора проверить подвешенные узлы, которое предлагает возможные элементы для проверки, такие как зазор рычага ножа или износ кулачка рычага ножа, или проверить натяжение шпагата (слишком слабое) или проверить препятствие для передвижения рычагов 172 механизма натяжения шпагата. Если оператор определяет, что натяжение шпагата слишком слабое, натяжение, предоставляемое соответствующим устройством натяжения шпагата или захватом 104 может быть увеличено посредством затягивания гаек 138 для того, чтобы увеличить смещающее усилие, прикладываемое пружинами 136, для удерживания вместе сцепленных рифленых роликов 106 и 108.
Далее со ссылкой на Фиг.7, показан сенсорный узел 250 положения рычага механизма натяжения, который содержит альтернативный вариант осуществления рычага 172 механизма натяжения и следящего механизма 228 рычага натяжения, при этом элементам, аналогичным элементам, описанным ранее даны те же самые ссылочные номера. Конкретно, показан рычаг 252 механизма натяжения шпагата, содержащий пружинный металлический стержень, содержащий вытянутую прямую секцию 254, соединенную и тянущуюся назад от одного конца пружинной секции 256, имеющей второй конец, соединенный с короткой простирающейся назад секцией 258, заканчивающейся крюком или ушком 260, установленным вокруг установочного болта 262, выступающего вверх через желобчатый элемент 112 и принимающего гайку 264, плотно навинченную по шайбе 266, которая касается ушка 260. Еще одно ушко 268 образовано на заднем конце прямой секции 254 рычага 252 механизма натяжения и крепко зажимает в общем цилиндрическую направляющую 270 шпагата. Секция 254 рычага 252 механизма натяжения проходит через вертикальную прорезь 173, предоставленную в вертикальной пластине 146, при этом верхний конец 195 прорези служит в качестве верхнего стопора, к которому секция 254 вытянутого рычага смещается цилиндрической пружинной секцией 256. Соответственно, за счет выполнения рычага механизма натяжения в виде пружинной металлической штанги, для смещения рычага в его верхнее крайнее положение не требуется никакой дополнительной пружины.
Как и у ранее описанных рычагов 172 механизма натяжения, положение рычага 252 механизма натяжения определяется с помощью соответствующего вращающегося потенциометра 210, но вследствие того, что рычаг 235 механизма натяжения имеет стержневую конструкцию, следящий механизм 228 рычага натяжения, связанный с потенциометром, заменен L-образным следящим механизмом 272 рычага, который отличается из следящего механизма 228 тем, что продольная стойка простирается назад, а не вперед, а поперечная стойка разветвленная для того, чтобы образовать открывающуюся вправо прорезь 274, которая принимает вытянутую секцию 254 рычага. Соответственно, как и у ранее описанного рычага 172, нить шпагата, тянущаяся назад от соответствующего одного из механизма натяжения шпагата или захватов 104, будет принимать направляющая 270 шпагата в заднем конце секции 254 рычага, причем она будет натягиваться для того, чтобы вызвать отклонение секции 254 натяжения рычага вниз в контакт с нижним ограничителем, образованным одной или другой из описанных выше трубок 196R и 196L, при этом соответствующий потенциометр 210 определяет передвижение секции 254 рычага, когда она передвигается между верхним и нижним ограничителями, и посылает контроллеру 232 сигнал, который соответствует положению, которое секция 254 рычага занимает в любое заданное время.
После описания предпочтительных вариантов осуществления, станет понятно, что различные модификации могут быть сделаны без выхода за пределы объема правовых притязаний изобретения, который определен в сопровождающей формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЗЛОВЯЗАЛЬНАЯ СИСТЕМА ДЛЯ ПРЕСС-ПОДБОРЩИКА | 2013 |
|
RU2605332C2 |
| СИСТЕМА НАТЯЖЕНИЯ ШПАГАТА ДЛЯ ПРЕСС-ПОДБОРЩИКА | 2013 |
|
RU2650533C2 |
| УЗЛОВЯЗАТЕЛЬ ДЛЯ ШПАГАТА | 2012 |
|
RU2599644C2 |
| УЗЛОВЯЗАТЕЛЬ ШПАГАТА И СПОСОБ ОБРАЗОВАНИЯ УЗЛА В ШПАГАТЕ | 2021 |
|
RU2793402C2 |
| ПРЕСС-ПОДБОРЩИК И СПОСОБ УСОВЕРШЕНСТВОВАННОГО МАНИПУЛИРОВАНИЯ ТЮКОМ | 2015 |
|
RU2697048C2 |
| СЦЕПКА ИЗ ТЯГАЧА И СЕЛЬСКОХОЗЯЙСТВЕННОГО ПРЕСС-УПАКОВЩИКА | 2014 |
|
RU2652151C2 |
| МАШИНА ДЛЯ ПРЕССОВАНИЯ ТЮКОВ С ВЯЗАЛЬНЫМ УСТРОЙСТВОМ | 2008 |
|
RU2464769C2 |
| СИСТЕМА УЗЛОВЯЗАТЕЛЯ ШПАГАТА ДЛЯ ВЯЗАНИЯ УЗЛОВ ШПАГАТА И УСТРОЙСТВО ПРЕССОВАНИЯ ТЮКОВ | 2019 |
|
RU2758012C1 |
| ДАТЧИК ПРЕССОВАЛЬНОЙ КАМЕРЫ | 2014 |
|
RU2617341C2 |
| ТЮКОВЫЙ ПРЕСС-ПОДБОРЩИК И СПОСОБ ФОРМИРОВАНИЯ ТЮКА | 2015 |
|
RU2681576C2 |

Группа изобретений относится к сельскохозяйственному машиностроению. Множество рычагов механизма натяжения шпагата установлены в равномерно распределенных местах по прессовальной камере крупнотюкового пресс-подборщика для вертикального поворота между верхним и нижним крайними положениями. Каждый рычаг механизма натяжения несет натянутую нить шпагата, связанную с устройством завязывания двойных узлов. Вращающийся потенциометр посредством следящего механизма рычага определяет поворотное передвижение каждого рычага механизма натяжения и отправляет соответствующий электрический сигнал в электронный контроллер. В электронном контроллере происходит обработка выявленного положения рычага вместе с другой сохраненной информацией и отправка сигнала для активации дисплея, показывающего относительные положения рычагов, и/или для активации предупреждающего устройства для извещения оператора, что сбой увязки произошел, должен произойти или что необходимо изменить регулировку механизма натяжения шпагата. 3 н. и 17 з.п. ф-лы, 7 ил.
1. Система контроля положения рычага механизма натяжения шпагата, содержащая: рычаг механизма натяжения шпагата, имеющий передний и задний концы и установленный на раме в передней концевой области, с созданием соединения, обеспечивающего возможность перемещения указанного рычага механизма натяжения между верхним и нижним крайними положениями; при этом указанный натяжной рычаг механизма натяжения смещен в указанное верхнее крайнее положение и имеет направляющую шпагата на своем заднем конце для зацепления нитью шпагата, которая, при натягивании в процессе формирования тюка, передвигает указанный рычаг механизма натяжения в направлении указанного крайнего нижнего положения; и предусмотрено сенсорное устройство для определения положения рычага, содержащее вращающийся потенциометр, имеющий вращающийся вал датчика, следящий механизм рычага, имеющий первый конец, соединенный с указанным вращающимся валом датчика, и имеющий отдельный конец, расположенный на пути передвижения рычага механизма натяжения шпагата для зацепления и передвижения вместе с рычагом механизма натяжения по мере того, как рычаг передвигается между указанными верхним и нижним крайними положениями, при этом потенциометр генерирует электрический сигнал, характеризующий положение рычага механизма натяжения в любой заданный момент времени.
2. Система по п.1, в которой указанный рычаг механизма натяжения шпагата содержит жесткой рычаг, установленный с возможностью поворота вокруг оси по существу с осевым выравниванием с валом датчика.
3. Система по п.2, в которой указанный следящий механизм рычага является в общем L-образным, с первой стойкой, проходящей параллельно указанной оси и устанавливаемой в отверстии, предоставленном в рычаге механизма натяжения, и со второй стойкой, проходящей перпендикулярно указанной оси и зафиксированной на указанном валу датчика.
4. Система по п.3, в которой указанный рычаг механизма натяжения проходит вперед за пределы указанной оси, а указанное отверстие представляет собой прорезь, образованную в переднем конце рычага механизма натяжения.
5. Система по п.1, в которой указанный рычаг механизма натяжения содержит вытянутый пружинный элемент консольного типа, а указанный следящий механизм рычага содержит первую и вторую стойки, соединенные друг с другом с образованием формы L; при этом первая стойка, проходит параллельно указанной оси, является разветвленной и охватывает с двух сторон указанный пружинный элемент; и при этом вторая стойка прикреплена к указанному валу датчика для придания вращения указанному валу датчика в ответ на вертикальное отклонение указанного рычага механизма натяжения.
6. Система по п.5, в которой указанный пружинный элемент содержит пружинный металлический стержень, содержащий вытянутую секцию, соединенную с одним концом пружинной секции, при этом указанная пружинная секция имеет второй конец, соединенный с короткой секцией, прикрепленной к указанной раме.
7. Крупнотюковый пресс-подборщик, имеющий: расположенную продольно прессовальную камеру; вязальную систему, содержащую множество вязальных узлов, равномерно распределенных в поперечном направлении по верхней стенке прессовальной камеры и предоставленных для завязывания соответственно множества петель нитей шпагата вокруг тюка, сформированного в прессовальной камере, при этом каждое вязальное приспособление содержит рычаг механизма натяжения шпагата, установленный с возможностью вертикального передвижения между верхним и нижним крайними положениями и смещаемый с возможностью сопротивления передвижению в направлении указанного крайнего нижнего положения, и множество приспособлений для определения сбоя увязки, предоставленных соответственно для определения сбоя увязки, связанного с каждой из указанного множества петель, при этом предусмотрено, что каждое указанное приспособление для определения сбоя увязки содержит потенциометр, имеющий вращающийся вал датчика; и следящий механизм рычага, соединенный между указанным валом датчика и соответствующим одним из указанных рычагов механизма натяжения для передачи движения указанного соответствующего одного из рычагов механизма натяжения на указанный вал датчика, который вращается и заставляет указанный потенциометр генерировать сигнал, отображающий положение указанного соответствующего одного из рычагов механизма натяжения в любой заданный момент времени в процессе образования и завязывания указанного множества петель нитей шпагата вокруг тюка в прессовальной камере.
8. Пресс-подборщик по п.7, в котором каждый указанный рычаг механизма натяжения представляет собой жесткий рычаг, установленный с возможностью поворота вокруг горизонтальной, поперечной оси, при этом вал датчика каждого потенциометра расположен выровненным в осевом направлении с указанной осью.
9. Пресс-подборщик по п.8, в котором следящий механизм рычага каждого приспособления для определения сбоя увязки содержит первую и вторую стойки, соединенные друг с другом с образованием формы L, при этом первая стойка проходит параллельно указанной оси и установлена в отверстии, предоставленном в соответствующем рычаге механизма натяжения, и при этом вторая стойка закреплена на валу датчика.
10. Пресс-подборщик по п.9, в котором каждый рычаг механизма натяжения имеет передний конец, отнесенный вперед от указанной оси, а указанное отверстие представляет собой выемку, расположенную в указанном переднем конце.
11. Пресс-подборщик по п.7, в котором каждый рычаг механизма натяжения содержит вытянутый пружинный элемент консольного типа.
12. Пресс-подборщик по п.11, в котором указанный вытянутый пружинный элемент образован пружинным металлическим стержнем, содержащим центральную цилиндрическую торсионную пружинную секцию, имеющую противоположные первый и второй концы, соединенные соответственно с вытянутой, расположенной продольно рычажной секцией и короткой крепежной секцией, при этом рычажная секция имеет направляющую шпагата, образованную на ее свободном конце, и при этом указанная крепежная секция образует петлю, установленную вокруг и крепко удерживаемую установочным болтом, и при этом указанная пружинная секция, при отсутствии нагрузки, удерживает рычажную секцию в указанном крайнем верхнем положении.
13. Пресс-подборщик по п.12, в котором каждый вал датчика расположен вдоль оси, проходящей в центре через пружинную торсионную секцию пружинного элемента, и соединен с рычажной секцией пружинного элемента посредством указанного следящего механизма рычага для того, чтобы измерять угловое отклонение рычажной секции от указанного крайнего верхнего положения.
14. Пресс-подборщик по п.13, в котором указанный следящий механизма рычага образован L-образной планкой, при этом одна стойка L-образной планки проходит перпендикулярно рычажной секции и снабжена выемкой, принимающей рычажную секцию.
15. Крупнотюковый пресс-подборщик, имеющий вязальное приспособление для скрепления противоположных концов множества комплектов верхних и нижних нитей шпагата вместе с соответствующими узлами для образования соответственно множества петель шпагата вокруг тюков сельскохозяйственной культуры, производимых в прессовальной камере пресс-подборщика, при этом каждое вязальное приспособление дополнительно содержит:
множество подвижных, смещенных вверх рычагов механизма натяжения, соответственно сцепленных с множеством верхних нитей шпагата указанного множества комплектов верхних и нижних нитей шпагата для выбирания слабины указанного множества верхних нитей,
множество узловязальных узлов для скрепления соответственно вместе комплекта верхней и нижней нитей шпагата указанного множества петель,
систему игл, содержащую множество игл для сведения вместе соответствующих концов указанного множества комплектов верхних и нижних нитей шпагата в соприкосновение для соответственно соединения вместе указанного множества узловязальных узлов, при этом связывающий механизм циклически проходит цикл завязывания, в процессе которого множество рычагов механизма натяжения смещаются между первым и вторым положениями, при этом рычаги, как правило, смещаются из первого во второе положение сразу после того, как узловязальные узлы связывают вместе противоположные концы комплектов верхних и нижних нитей шпагата, а после этого смещаются из второго в первое положение,
систему электронного управления для мониторинга работы вязального приспособления, содержащую:
электрически реагирующий датчик положения рычага механизма натяжения, связанный с каждым рычагом механизма натяжения шпагата и выполненный с возможностью определения положения соответствующего рычага механизма натяжения на протяжении его передвижения между первым и вторым положениями и с возможностью генерирования электрического сигнала положения рычага, соответствующего положению соответствующего рычага механизма натяжения;
электронный контроллер;
при этом каждый датчик положения рычага механизма натяжения соединен с электронным контроллером с возможностью отправки электрического сигнала положения рычага;
дисплей, соединенный с электронным контроллером, при этом электронный контроллер действует в ответ на указанные электрические сигналы положения рычага, генерируя соответствующие сигналы управления дисплеем и заставляя указанный дисплей показывать выявленные положения каждого из указанных рычагов механизма натяжения;
указанный электронный контроллер, содержит логическое программное обеспечение для определения аномалий в выявленных положениях рычагов механизма натяжения и отправки предупреждающих сигналов на указанный дисплей, вызывая активацию по меньшей мере одного из звукового или визуального сигнального элемента для информирования оператора о любой подобной аномалии, при этом по меньшей мере одной из аномалий является расположение по меньшей мере одного рычага механизма натяжения в положении, не являющимся одним из указанных первого и второго положений, когда большая часть рычагов механизма натяжения находится в подобном одном из указанных первого и второго положений.
16. Пресс-подборщик по п.15, в котором каждый электрически реагирующий датчик положения рычага шпагата представляет собой электронный вращающийся потенциометр.
17. Пресс-подборщик по п.15, в котором указанное логическое программное обеспечение выполнено с возможностью подачи предупреждающего сигнала на указанный дисплей для активации сигнализации проверки натяжения, когда аномалия состоит в том, что один из рычагов механизма натяжения находится выше или ниже, чем остальные рычаги механизма натяжения, когда множество рычагов механизма натяжения передвигаются из указанного второго в указанное первое положение.
18. Пресс-подборщик по п.17, в котором указанное логическое программное обеспечение выполнено с возможностью отправки предупреждающего сигнала на указанный дисплей для активации сообщения обнаружения подвешенного узла, в ответ на то, что один из указанных рычагов механизма натяжения остается в указанном первом положении непосредственно после завязывания узла, образующего петлю вокруг тюка, сформированного в прессовальной камере.
19. Пресс-подборщик по п.18, в котором указанное логическое программное обеспечение, в дополнение к осуществлению активации сообщения о подвешенном узле, дополнительно активирует по меньшей мере одно из сообщений проверки зазора рычага ножа или проверки износа кулачка рычага ножа.
20. Пресс-подборщик по п.15, в котором указанное логическое программное обеспечение выполнено с возможностью, в ответ на сообщение указанных датчиков рычагов механизма натяжения шпагата, что один рычаг механизма натяжения отстает от других при передвижении из указанного второго в указанное первое положение, отправки командного сигнала для активации дисплея для отображения сообщения, направляющее оператора проверить, является ли натяжение, создаваемое соответствующим механизмом натяжения шпагата, слишком слабым или проверить, имеется ли препятствие для отстающего рычага механизма натяжения.
| US 4753463 A1, 28.06.1988 | |||
| US 4765235 A1, 23.08.1988 | |||
| РАСТВОР ДЛЯ СНЯТИЯ ЗАУСЕНЦЕВ И "ГРАТА" С ПОВЕРХНОСТИ ИЗДЕЛИЙ ИЗ МЕДИ И МЕДНЫХ СПЛАВОВ | 2009 |
|
RU2412279C1 |
| Пресс-подборщик поршневого типа | 1982 |
|
SU1042666A1 |
| Устройство для обнаружения невязи тюков в пресс-подборщике | 1986 |
|
SU1784132A1 |

