Изобретение относится к методам и средствам обнаружения малоразмерных электронных устройств (ЭУ), скрытых среди предметов домашней обстановки, спрятанных под верхней одеждой потенциальных террористов или замаскированных в верхнем слое подстилающей поверхности.
Известен способ обнаружения ЭУ, реализация которого представлена в виде импульсного металлодетектора (ИМД) [1], в котором возбуждающий поисковую катушку индуктивности сигнал имеет вид периодической последовательности коротких зондирующих импульсов с высокой скважностью, а каждый из отраженных импульсов, длительность которых сравнима с длительностью зондирующих импульсов, поступает на вход приемника ИМД сразу же после окончания соответствующего зондирующего импульса. При этом в ИМД используется свойство ЭУ как пассивного металлического отражателя. Вместе с тем, ЭУ можно рассматривать и как источник магнитных импульсов, что открывает возможность для реализации в ИМД дополнительной опции - в паузах между зондирующими импульсами обнаружение излучаемых ЭУ магнитных импульсов. Это означало бы организацию в ИМД двух режимов работы: активного режима, в качестве которого выступает рассмотренный выше исходный режим работы ИМД с использованием модели ЭУ в виде пассивного металлического отражателя, и пассивного режима, в котором осуществляется обнаружение излучаемых ЭУ магнитных импульсов с использованием модели ЭУ в виде источника магнитных импульсов, в результате чего ИМД переходил бы в разряд активно-пассивных обнаружителей ЭУ.
Недостаток аналога состоит в нерациональном использовании временного ресурса, отводимого для поиска ЭУ, а именно, в отсутствии режима пассивного обнаружения ЭУ, что ограничивает эффективность обнаружения ЭУ.
В качестве прототипа выберем активный способ обнаружения ЭУ, реализация которого подобна аналогу в виде ИМД [1], но дополненный пассивным способом обнаружения ЭУ. Реализация такого активно-пассивного способа обнаружения ЭУ осуществляется путем комплексирования ИМД с дополнительно включаемым в его состав пассивным обнаружителем потока магнитных импульсов. При этом подразумевается совместное использовании одной и той же поисковой катушки индуктивности и единого приемного устройства в разных режимах работы ИМД.
Конкретизируем модель прототипа, максимально приближая его к предложенному способу:
- разобьем весь интервал времени, отводимый для осуществления процедуры обнаружения ЭУ, на N циклов обнаружения, каждый длительностью Т, а в пределах каждого n-го цикла, n=1,2,…,N, организуем последовательно сначала активный (А), а затем пассивный (Р) режим работы ИМД, причем активный режим начинается с излучения зондирующего импульса. Заметим, что обязательной процедурой для эффективного функционирования ИМД в пассивном режиме является стробирование приемника на время излучения зондирующих импульсов;
- сами циклы организуем с помощью периодической, с периодом Т, последовательности коротких цикловых импульсов Cn, n=1,2,…,N, передним фронтом которых завершается (n-1)-й цикл, а задним фронтом - начинается n-й цикл;
- формирование цикловых импульсов Cn осуществим с помощью делителя частоты в виде счетчика, на вход которого поступают тактовые импульсы (меандр) задающего цифрового генератора [2];
- будем считать, что поток магнитных импульсов, возбуждающих поисковую катушку индуктивности ИМД в пассивном режиме, характеризуется высокой скважностью и средним периодом повторения, соизмеримым или большим, чем Т;
- примем условие, что алгоритмы обработки сигналов в ИМД включают в себя процедуру бинарного квантования выходных сигналов приемника, сущность которой заключается в пороговом обнаружении принимаемых импульсов, с формированием бинарных единиц обнаружения «1A» и «1P» в активных и пассивных режимах соответственно. В результате подсчета числа бинарных единиц «1А» и «1Р» в течение N циклов и сравнения этих данных с пороговыми числами MA и MP принимается решение об обнаружении ЭУ в активном и пассивном режимах соответственно, реализуя тем самым логику принятия решения «MA из N» и «MP из N» [3; стр. 81-83].
Недостаток прототипа состоит в низкой эффективности обнаружения ЭУ. Здесь необходимо сделать принципиальное для дальнейшего замечание. Несмотря на то, что в прототипе считается выполненным указанное выше комплексирование ИМД с пассивным обнаружителем магнитных импульсов, следствием которого является расширение функциональных возможностей ИМД, оно еще не гарантирует достижения максимальной эффективности ИМД. Причина этого кроется в постоянстве периода повторения цикловых импульсов, привязанных к зондирующим импульсам ИМД, что является серьезным ограничением, не позволяющим полностью раскрыть потенциальные возможности активно-пассивного способа обнаружения ЭУ.
Целью изобретения является повышение эффективности ИМД с активно-пассивным способом обнаружения ЭУ путем вобуляции периода повторения зондирующих импульсов, управляемой сигналами, принятыми в пассивном режиме работы ИМД.
Поставленная цель достигается путем генерирования тактовых импульсов, формирования с помощью счетчика тактовых импульсов последовательности цикловых импульсов Cn (n=1,2,…,N), передним фронтом которых завершается (n-1)-й цикл обнаружения, а задним фронтом - начинается n-й цикл обнаружения, организации в пределах каждого n-го цикла последовательно активного и пассивного режимов работы импульсного металлодетектора, бинарного квантования результатов обработки принимаемых сигналов в активном и пассивном режимах, подсчета числа бинарных единиц квантования для каждого из режимов в течение N циклов, сравнения результатов этих подсчетов с пороговыми числами и дополнительного обнуления счетчика тактовых импульсов единицами бинарного квантования, полученными в пассивном режиме, причем активный режим начинается с излучения зондирующего импульса.
На фиг. 1 изображена схема активно-пассивного ИМД, где элементы 1-9 которой несут следующее техническое содержание: 1 - таймер; 2 - формирователь зондирующих импульсов; 3 - поисковая катушка индуктивности; 4 - приемник; 5 - коммутатор; 6 и 8 - бинарные квантователи сигналов, принятых в пассивном и активном режимах соответственно; 7 и 9 - схемы подсчета бинарных единиц «1P» и «1A» и принятия решения об обнаружении ЭУ в пассивном и активном режимах соответственно.
На фиг. 2 изображены временные диаграммы управляющих импульсов, поясняющие работу активно-пассивного ИМД фиг. 1.
Функционирование предложенного способа удобно рассмотреть, обращаясь к схеме фиг. 1.
Элементы 1, 2, 3, 4, 5, 8, 9 в совокупности выполняют роль обнаружителя ЭУ как пассивного металлического отражателя, а элементы 1, 2, 3, 4, 5, 6, 7 в совокупности выполняют роль обнаружителя магнитных импульсов РЭУ. Причем, приемник 4 по существу представляет собой усилитель низкой частоты с полосой, позволяющей сохранить без существенного искажения форму импульсов, принимаемых поисковой катушкой индуктивности 3 в обоих режимах работы ИМД.
Собственно комплексирование ИМД и обнаружителя магнитных импульсов обеспечивается группой управляющих импульсов, в состав которой входят три импульса стробирования: «запрещающий» строб S0 и два «разрешающих» строба SA и SP, а также бинарные единицы «1P». Процесс формирования стробов S0, SA и SP повторяется от цикла к циклу с привязкой к цикловым импульсам Cn, n=1,2,…N. Цикловые импульсы и стробы формируются таймером 1, состоящим из последовательного включенных внутреннего генератора таймера и счетчика тактовых импульсов на базе внутренних триггеров счетчика, работающих в счетном режиме, а также набора дешифраторов [2]. Цикловые импульсы являются импульсами «внутреннего пользования» в таймере, т.к. они поступают на обнуляющие входы внутренних триггеров счетчика и непосредственно не воздействуют на другие элементы схемы ИМД. В отличие от них стробы S0, SA и SP явно участвуют в процессе управления процессом комплексирования. Передний фронт строба S0 совпадает с задним фронтом цикловых импульсов Cn, n=1,2,…N, а длительность строба S0 совпадает с длительностью зондирующего импульса. Передний фронт строба SA совпадает с задним фронтом строба S0, а длительность строба SA выбирается равной максимальной длительности отраженных импульсов. Передний фронт строба SP совпадает с задним фронтом строба SA, а сам строб SP заканчивается с приходом следующего Cn+1-го циклового импульса, т.е. его задний фронт совпадает с передним фронтом Cn+1-го циклового импульса. «Запрещающий» строб S0 не позволяет проникнуть на вход приемника 4 зондирующих импульсов, «разрешающий» строб SA пропускает на «А-выход» коммутатора 5 только отраженные импульсы ЭУ, а «разрешающий» строб SP пропускает на «Р-выход» коммутатора 5 только излучаемые ЭУ магнитные импульсы. Фактически строб S0 и примыкающий к нему справа по оси времени строб SA вместе определяют интервал времени, в течение которого действует активный режим ИМД в соответствующем цикле, а примыкающий справа по оси времени к стробу SA строб SP определяет интервал времени, в течение которого действует пассивный режим ИМД в соответствующем цикле. Коммутатор 5 может быть выполнен в виде двух ключевых схем «А» и «Р», управляемых стробами SA и SP соответственно.
В ситуации, когда ЭУ отсутствует в зоне обнаружения ИМД, моменты появления цикловых импульсов периодически, с периодом Т, повторяются. Если же ЭУ присутствует в зоне обнаружения, то на выходе бинарного квантователя 6 с высокой вероятностью возможно появление бинарной единицы «1Р» с задержкой τ от начала текущего, n-го цикла обнаружения. В результате подачи бинарной единицы «1P» на управляющий вход таймера 1, который соединен с обнуляющими входами внутренних триггеров счетчика, n-й цикл завершается и начинается новый (n+1)-й цикл. Фактически бинарная единица «1P» выполняет функцию (n+1)-го циклового импульса Cn+1, перезапуская процесс формирования цикловых импульсов и стробов S0, SA, SP, начиная с (n+1)-го цикла. Воздействие бинарной единицы «1P» можно интерпретировать как сдвиг влево по оси времени последовательности Cn(n=1,2,…,N) на величину (Т-τ), начиная с (n+1)-го циклового импульса Cn+1. Тем самым происходит управляемая бинарными единицами «1P» вобуляция периода повторения цикловых импульсов.
В отличие от бинарного квантователя 8, который имеет вид однопорогового компаратора, бинарный квантователь 6 построен на базе двухпорогового компаратора, обеспечивающего регистрацию магнитных импульсов ЭУ произвольной полярности. Пороговые уровни в компараторах устанавливаются при такой окружающей обстановке, когда в зоне обнаружения ИМД гарантированно отсутствует ЭУ, что обычно практикуется при подготовке ИМД к работе.
В логических схемах 7 и 9 производится подсчет количества появившихся в течение N циклов бинарных единиц «1P» и «1A» и принятие решения об обнаружении ЭУ путем сравнения полученных результатов с пороговыми числами МА и MP, реализуя логику принятия решения «МА из N» и «MP из N».
Положительный эффект от дополнительно проводимых действий, связанных с перезапуском процесса формирования цикловых импульсов и приводящих к вобуляции периода повторения зондирующих импульсов, можно обосновать следующим образом. Очевидно, что моменты излучения зондирующих импульсов ИМД могут совпадать с моментами появления магнитных импульсов ЭУ на входе приемника, закрытого на прием стробами S0. В терминах радиолокации такое «перекрытие» указанных импульсов означает «пропуск цели». Вместе с тем, вероятность малых значений временных интервалов между двумя соседними магнитными импульсами ЭУ значительно отличается от вероятности таких временных интервалов между ними, которые близки к среднему периоду их повторения, причем в меньшую сторону. Поэтому перезапуск процесса формирования цикловых импульсов сразу же после обнаружения магнитных импульсов ЭУ снижает вероятность указанных «перекрытий» и, следовательно, повышает вероятность обнаружения магнитных импульсов ЭУ.
Источники информации
1. Щедрин А.И. Новые металлоискатели для поиска кладов и реликвий. - М., «Горячая линия-Телеком», 2003 г.
2. Новиков Ю.В. Основы цифровой схемотехники. Базовые элементы и схемы. Методы проектирования. - М.: Мир, 2001 г.
3. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: Радио и связь, 1981 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ХАОТИЧЕСКОЙ ПОСЛЕДОВАТЕЛЬНОСТИ ИМПУЛЬСОВ | 2013 |
|
RU2536638C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЗАПРЕЩЁННЫХ ПРЕДМЕТОВ АРОЧНЫМ МЕТАЛЛОДЕТЕКТОРОМ | 2015 |
|
RU2589238C1 |
| ПЕЛЕНГАТОР БОКОВОГО ОБЗОРА | 2003 |
|
RU2252428C1 |
| СПОСОБ СИНХРОННОГО ДЕТЕКТИРОВАНИЯ В ОБНАРУЖИТЕЛЯХ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2006 |
|
RU2319979C1 |
| Способ обнаружения источника радиоимпульсов | 2018 |
|
RU2674073C1 |
| СПОСОБ ОБНАРУЖЕНИЯ РАДИОИЗЛУЧЕНИЯ В БЛИЖНЕЙ ЗОНЕ ИСТОЧНИКА | 2012 |
|
RU2505834C1 |
| Способ обнаружения импульсных сигналов в дискретно-непрерывной записи электромагнитного излучения | 2023 |
|
RU2821272C1 |
| ОБНАРУЖИТЕЛЬ РАДИОИМПУЛЬСОВ | 2014 |
|
RU2547095C1 |
| Способ обнаружения объектов беспроводных сетей передачи информации | 2018 |
|
RU2696851C1 |
| СПОСОБ НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ | 2011 |
|
RU2450287C1 |

Изобретение относится к методам и средствам обнаружения малоразмерных электронных устройств (ЭУ) на базе импульсных металлодетекторов. Поставленная цель - повышение эффективности обнаружения ЭУ - достигается за счет более рационального использования временного ресурса, отводимого на поиск ЭУ, и расширения функциональных возможностей импульсного металлодетектора путем его комплексирования с пассивным обнаружителем излучаемого ЭУ потока магнитных импульсов. Отличительной особенностью предложенного активно-пассивного импульсного металлодетектора является вобуляция периода повторения его зондирующих импульсов, причем управление процессом вобуляции осуществляется бинарно-квантованными сигналами, принятыми в пассивном режиме работы импульсного металлодетектора. В способе обнаружения электронных устройств импульсным металлодетектором осуществляется генерирование тактовых импульсов, формирование с помощью счетчика тактовых импульсов последовательности цикловых импульсов Cn(n=1,2,…,N), передним фронтом которых завершается (n-1)-й цикл обнаружения, а задним фронтом - начинается n-й цикл обнаружения, организация в пределах каждого n-го цикла последовательно активного и пассивного режимов работы импульсного металлодетектора, бинарное квантование результатов обработки принимаемых сигналов в активном и пассивном режимах, подсчет числа бинарных единиц квантования для каждого из режимов в течении N циклов и сравнение результатов этих подсчетов с пороговыми числами, дополнительно осуществляется обнуление счетчика тактовых импульсов единицами бинарного квантования, полученными в пассивном режиме, причем активный режим каждого цикла начинается с излучения зондирующего импульса. 2 ил.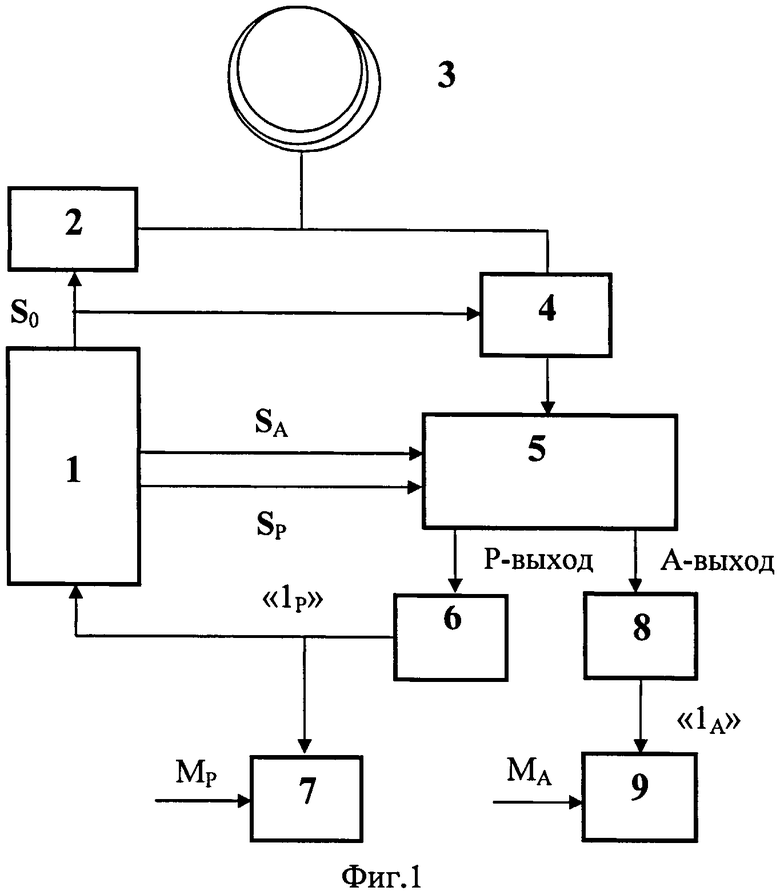
Способ обнаружения электронных устройств импульсным металлодетектором, в котором осуществляется генерирование тактовых импульсов, формирование с помощью счетчика тактовых импульсов последовательности цикловых импульсов Cn(n=1,2,…,N), передним фронтом которых завершается (n-1)-й цикл обнаружения, а задним фронтом - начинается n-й цикл обнаружения, организация в пределах каждого n-го цикла последовательно активного и пассивного режимов работы импульсного металлодетектора, бинарное квантование результатов обработки принимаемых сигналов в активном и пассивном режимах, подсчет числа бинарных единиц квантования для каждого из режимов в течение N циклов и сравнение результатов этих подсчетов с пороговыми числами, дополнительно осуществляется обнуление счетчика тактовых импульсов единицами бинарного квантования, полученными в пассивном режиме, причем активный режим каждого цикла начинается с излучения зондирующего импульса.
| Щедрин А.И | |||
| Новые металлоискатели для поиска кладов и реликвий | |||
| -М., 2003 г | |||
| СПОСОБ ПОИСКА, ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ЭЛЕКТРОННЫХ УСТРОЙСТВ С ПОЛУПРОВОДНИКОВЫМИ ЭЛЕМЕНТАМИ | 2010 |
|
RU2432583C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2409822C1 |
| КОМПОНЕНТНЫЙ ИНДИКАТОР БЛИЖНЕГО ПОЛЯ | 2007 |
|
RU2349927C1 |
| СПОСОБ ЛОКАЛИЗАЦИИ ТЕХНИЧЕСКИХ КАНАЛОВ УТЕЧКИ ИНФОРМАЦИИ | 2002 |
|
RU2219669C1 |
| US 4270127 A1 26.05.1981 | |||

