Область техники, к которой относится изобретение
Настоящее изобретение относится в целом к управлению передачей и, в частности, касается конфигурации передачи, имеющей гидромотор или вариатор, позволяющий осуществлять точное управление крутящим моментом.
Уровень техники
Для машин, приводимых в действие не непосредственно соответствующими источниками энергии, передача является ключевым компонентом цепи привода, влияющим как на производительность, так и на кпд. Передача выполняет много задач, включающих в себя, например, понижение или повышение передаточного отношения для согласования скорости вращения и (или) крутящего момента на выходе привода со скоростью вращения и (или) крутящим моментом двигателя, соединение и рассоединение источника энергии и последнего звена привода, амортизацию толчков цепи привода, поглощение энергии машины, например замедление машины и т.д. В то время как выполнение многих из этих задач требует усложнения системы передачи, само усложнение может приводить к проблемам обеспечения управляемости и стабильности передачи.
Гидравлические передачи и приводы могут быть успешно использованы во многих сценариях, но они достаточно сложны. Такие передачи включают в себя, но не ограничиваются, гидростаты, гидромеханические или другие передачи или приводы, содержащие гидравлический вариатор или систему гидронасос/гидромотор. Одной из наиболее полезных, но сложных гидравлических систем передачи является гидромеханический привод с разветвленным потоком мощности (или с параллельными путями), который рассматривается здесь в качестве примера. Это тип передачи обладает множеством преимуществ над традиционными механическими передачами, используемыми в машинах для производства земляных работ, таких как тракторы, бульдозеры и автопогрузчики. Например, гидромеханическая передача типично способна обеспечить непрерывный контроль скорости и более эффективное и действенное управление оборотами двигателя.
Однако из-за сложности таких приводов способ управления ими в корне отличается от технологий управления стандартными механическими передачами. Как будет рассмотрено подробно ниже, гидромеханический передача с разветвленным потоком мощности включает в себя вариатор, чей выход связан с первичным источником энергии, обычно двигателем, посредством комплекта систем планетарной передачи, входящего в передачу. Вариатор включает в себя гидростатический насос, производительность которого регулируется гидроусилителем.
Крутящее усилие на выходе передачи поэтому является функцией мгновенных характеристик как двигателя, так и вариатора. Традиционно такими гидромеханическими приводами управляют с использованием технологий регулирования оборотов. В частности, обороты на выходе привода регулируют путем управления производительностью насоса. Такой подход основан на использовании обратной связи на гидроусилитель насоса для перевода поршня гидроусилителя в конкретное положение, таким образом, обеспечивая конкретную производительность насоса. Несмотря на то что такие системы управления оборотами обеспечивают крутящий момент на выходе, они не позволяют регулировать выходной крутящий момент, но регулируют обороты на выходе или отношение оборотов (оборотов на выходе к оборотам на входе). Такая система эффективна в некоторых отраслях промышленности; однако отсутствие возможности управления крутящим моментом является недостатком для ряда отраслей промышленности и внешних условий, особенно тех, где используются большие машины для производства земляных работ.
Например, когда машина с управляемыми оборотами неожиданно сталкивается с препятствием или подъемом, передача с управляемыми оборотами может вызывать дергание двигателя, т.к. она поддерживает отношение скоростей вращения или оборотов, или может вызывать иные нестабильности или нежелательное поведение механизма привода. Один из видов системы для управления оборотами рассмотрен в патенте США №6684636 изобретателя Смита. Смит предлагает способ управления оборотами с использованием электрического сигнала, подаваемого на соленоид для изменения производительности насоса. На ровных поверхностях этот способ работает успешно, однако, как рассмотрено выше, на неровных поверхностях водитель или машина испытывают нежелательные ускорения, т.к. система управления стремится поддерживать заданные обороты.
Таким образом, несмотря на то, что приводы с управляемой скоростью вращения теоретически могут удовлетворять требованиям землеустроительных работ, такие системы не нашли широкого практического применения из-за сложности определения правильной производительности насоса в условиях быстро меняющейся поверхности. В частности, любая ошибка в производительности во время управления оборотами может приводить к рывкам и крену и в целом к нежелательному поведению машины.
Описываемые в данном документе принципы призваны, по меньшей мере, отчасти устранить один или более недостатков предшествующего уровня техники как отмеченных здесь, так и прочих. Однако понятно, что настоящее изобретение само по себе определяется прилагаемой формулой изобретения без учета того, устраняет ли заявленное изобретение, и если устраняет, то насколько, одну или более отмеченных проблем существующих технологий. Более того, следует понимать, что любое рассмотрение здесь любой ссылки или публикации имеет намерением всего лишь пригласить изучить саму означенную ссылку и не имеет целью подменить или дополнить текущую ссылку. В той части, в какой такое рассмотрение любой ссылки противоречит такой ссылке, следует понимать, что сама ссылка убедительна в отношении ее идеи.
Раскрытие изобретения
В одном из аспектов предложено устройство для управления необходимым крутящим моментом гидромеханического или другого гидравлического привода или передачи. Устройство включает в себя модуль управления, выполненный с возможностью определения необходимого крутящего момента и определения давления гидроусилителя, которое, будучи приложенным, заставляет вариатор (или другой гидромотор) выдавать необходимый крутящий момент.
В другом аспекте предложена примерная передача, обеспечивающая необходимый крутящий момент. Передача включает в себя насос переменного рабочего объема, приводимый в действие подходящим устройством выработки энергии, таким как двигатель внутреннего сгорания, гидромотор постоянного или переменного рабочего объема, приводимый в действие насосом переменного рабочего объема, редукторное устройство, гидроусилитель и модуль управления. Гидроусилитель выполнен с возможностью влияния на рабочий объем насоса переменного объема, а модуль управления выполнен с возможностью определения необходимого крутящего момента и определения давления гидроусилителя, которое, будучи приложенным, побуждает вариатор выдавать необходимый крутящий момент.
В еще одном аспекте предложен способ управления необходимым крутящим моментом передачи или привода. Способ состоит их этапов определения необходимого крутящего момента и выдачи необходимого крутящего момента мотором, например, входящим в состав гидромеханической передачи.
Следует иметь в виду, что как предыдущее общее описание, так и последующее подробное описание являются только примерными и пояснительными и не ограничивают объем настоящего изобретения.
Дальнейшие аспекты и характерные черты раскрываемых принципов будут понятны из следующего подробного описания и прилагаемых чертежей.
Краткое описание чертежей
Фиг.1 - блок-схема системы гидромеханической передачи, в рамках которой могут быть успешно применены описываемые принципы;
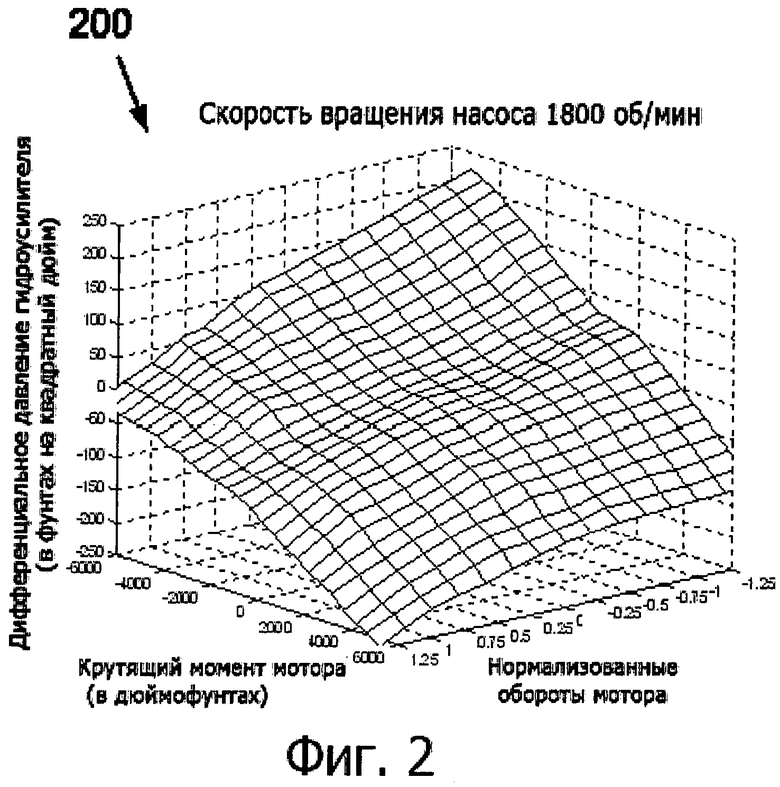
фиг.2 - карта давления гидроусилителя, используемая в одном из вариантов осуществления описываемых принципов для определения давления гидроусилителя, которое, будучи приложенным, побуждает вариатор или иной гидромотор выдавать необходимый крутящий момент;
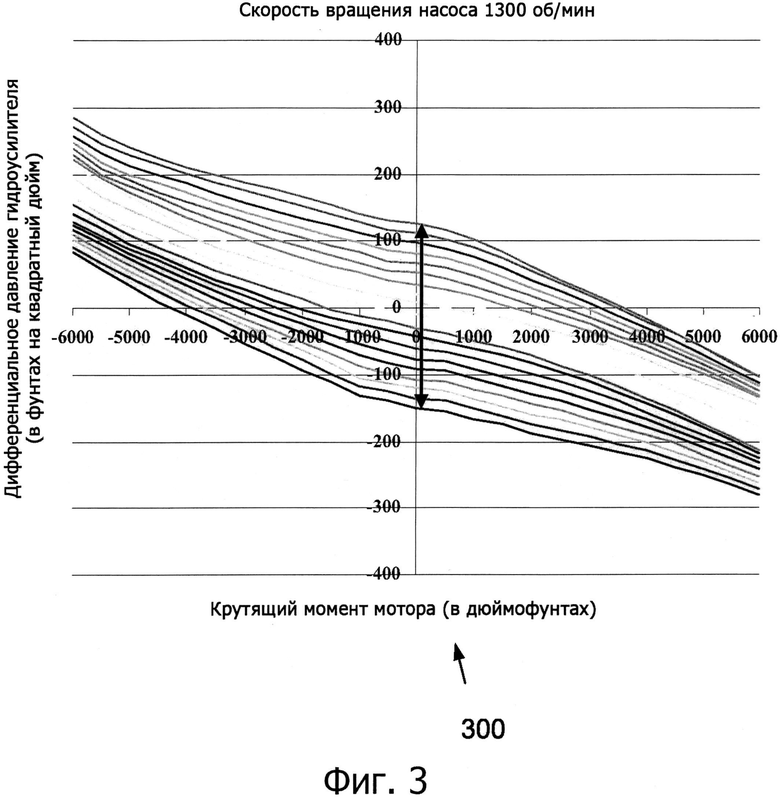
фиг.3 - карта зависимости выходного крутящего момента мотора и отношения оборотов мотора от давления гидроусилителя для конкретных оборотов насоса;
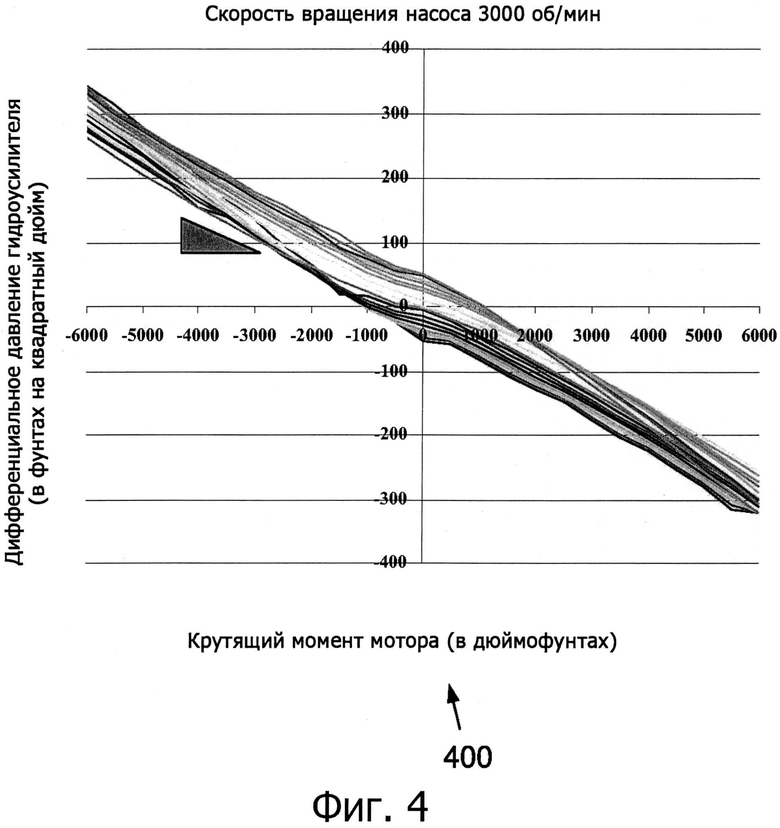
фиг.4. - карта зависимости выходного крутящего момента мотора и отношения оборотов мотора от давления гидроусилителя для других оборотов насоса;
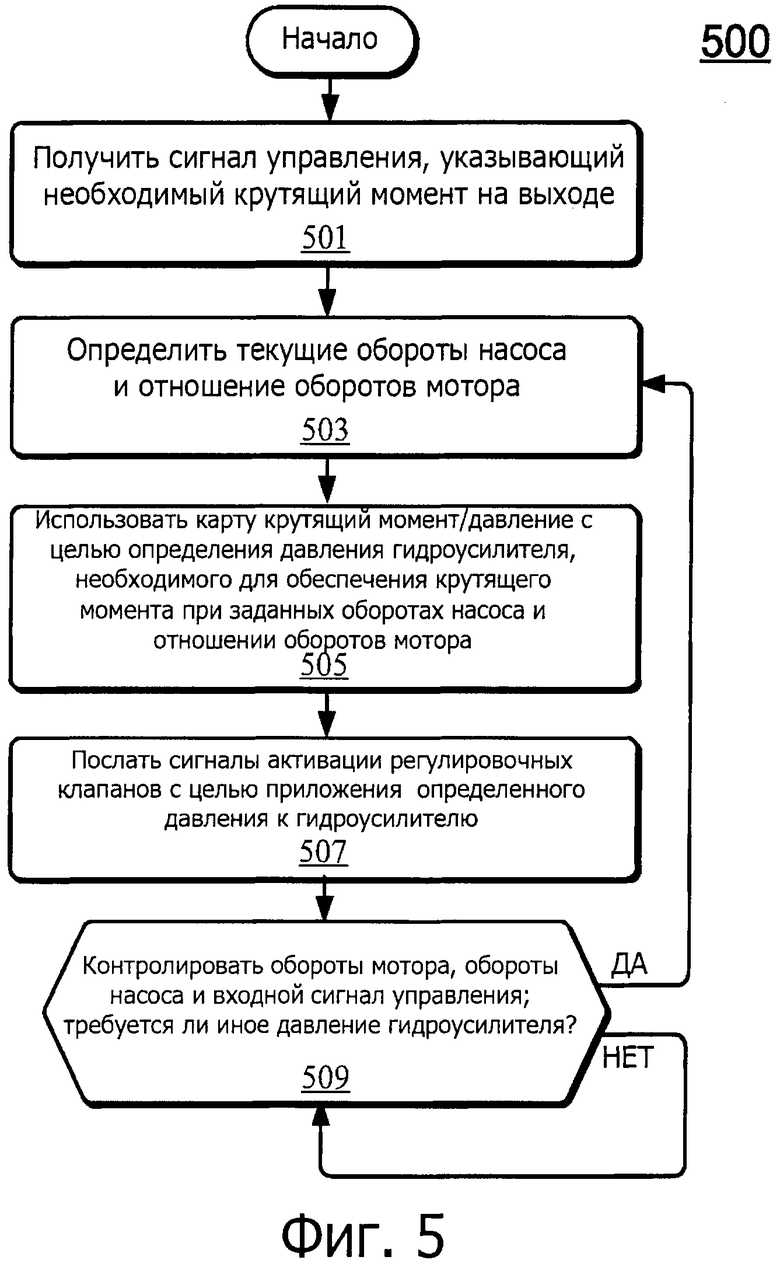
фиг.5 - блок-схема последовательности операций процесса применения карты, подобной изображенной на фиг.2, для получения необходимого крутящего момента.
Осуществление изобретения
Настоящее раскрытие относится к управлению передачей и приводом и, в частности, касается обеспечения необходимого крутящего момента гидромотора, например, входящего в состав гидростата или гидромеханической передачи, путем определения и приложения конкретного давления гидроусилителя. Таким образом, несмотря на то, что настоящее раскрытие в качестве примера сфокусировано на гидромеханической системе, специалисту в данной области техники понятно, что описываемые принципы применимы к любой системе, использующей гидромотор, приводимый в действие гидронасосом переменного рабочего объема, управляемым гидроусилителем.
В общих чертах, на фиг.1 показана блок-схема гидромеханической передачи, содержащая узлы, имеющие важное значение для полного понимания описываемых принципов. Приведенная гидромеханическая передача 10 содержит редукторное устройство 12, гидростатическое устройство 16, входной модуль 18, модуль 20 управления, гидроусилитель 22 и клапанное устройство 24.
Редукторное устройство 12 типично обеспечивает выход мощности на тяговое устройство (не показано) связанной с ним машины. Машиной может являться, например, машина для производства земляных работ, а тяговое устройство может включать в себя гусеницы, колеса, ремни и другие устройства для проведения земляных работ. Редукторное устройство 12 представляет собой гидромеханическое устройство любого подходящего типа, включая, например, конфигурацию, связанную с входом. Другие конфигурации, такие как конфигурации, связанные с выходом, и последовательные конфигурации, также пригодны для применения описываемых принципов.
Гидромеханическую передачу 10 подсоединяют к двигателю 14, коим может быть любое устройство, создающее крутящий момент. Примерными типами двигателей могут быть двигатели внутреннего сгорания, будь то бензиновые или дизельные двигатели, электромоторы, гидродвигатели и т.д. Двигатель 14 передает кинетическую энергию вращения гидростатическому устройству 16, например, сжимая масло или жидкую среду, а также редукторному устройству 12.
Гидростатическое устройство 16 включает в себя, по меньшей мере, два вращающихся узла. Вращающиеся узлы, как показано на чертеже, включают в себя гидронасос 26 переменного рабочего объема и гидромотор 28 постоянного рабочего объема, хотя вращающиеся узлы альтернативно могут оба иметь переменный рабочий объем. Гидронасос 26 переменного рабочего объема приводит в действие по текучей среде гидромотор 28 постоянного рабочего объема с целью выдачи вращательной энергии на редуктор 12. Гидростатическое устройство 16 может быть аксиально-поршневого типа, с изогнутой осью или другой подходящей конфигурации. Аналогично, гидростатическое устройство может иметь U-образную, рядную или другую известную компоновку.
Входной модуль 18 принимает команды или инструкции от источника команд и передает команды на модуль 20 управления, чтобы управлять машиной в соответствии с принятыми командами. Источником команд для входного модуля 18 могут быть наборный диск, клавиатура, интерактивный дисплей, кнопки, выключатели и (или) педали, а входной модуль может работать в соответствии с выполняемыми компьютером командами, считываемыми с машинно-читаемого носителя типа устройства памяти. Принимаемые команды могут быть данными, определяющими необходимый вход, предварительно задаваемыми критериями, частными условия или устанавливаемыми параметрами, вводимыми во входной модуль 18. Команды могут быть предварительно запрограммированы в модуле 20 управления, чтобы исполняться в соответствии с предварительно заданными критериями и (или) параметрами при определенных условиях. Источник команд может быть активирован оператором, например человеком, или может быть активирован выполнением или операцией программного обеспечения или цепью, предназначенной для выполнения конкретной функции.
Модуль 20 управления взаимодействует с входным модулем 18, первым и вторым датчиками 30 и 32 скорости и клапанным устройством 24. Модуль 20 управления принимает ввод команд от входного модуля 18 и определяет, что необходим некий крутящий момент мотора для обеспечения необходимой реакции машины. Приведенная система не отображает другие компоненты, и, например, могут быть использованы дополнительно или альтернативно другие датчики, необходимые для обеспечения дополнительной обратной связи или системной информации.
Следует отметить, что модули, такой как входной модуль 18 и модуль 20 управления, могут быть реализованы в виде цепи аппаратных средств, содержащей большие интегральные схемы или вентильные решетки, серийно выпускаемые полупроводники типа логических интегральных схем, транзисторов или других дискретных компонентов. Модули могут быть также реализованы программируемыми аппаратными средствами, такими как программируемые пользователем вентильные матрицы, программируемые логические матрицы, программируемые логические устройства и т.п. Модули могут быть также реализованы программным обеспечением для исполнения различными типами процессоров. Определенный модуль выполняемой программы может, например, содержать один или более физических или логических блоков компьютерных команд, которые могут, например, быть организованы в виде объекта, процедуры или функции. Тем не менее, исполняемые файлы определенного модуля необязательно должны быть физически расположены вместе, но могут содержать разнородные команды, хранящиеся в различных местах, которые, будучи логически объединенными вместе, составляют модуль и отвечают заявленному предназначению модуля.
Модуль 20 управления управляет гидроусилителем 22, который влияет на рабочий объем насоса 26 переменного рабочего объема. Гидроусилитель 22 включает в себя поршень 34, расположенный по центру цилиндра 36. Разность давлений между первой стороной 38 и второй стороной 40 цилиндра 36 определяет необходимый рабочий объем насоса 26 переменного рабочего объема посредством механизма наклонного диска, как это понятно специалисту в данной области техники. Гидроусилитель 22 содержит одну или более пружин 42 и 44, сконфигурированных для создания центрирующего усилия, пропорционального положению, предпочтительно без разрывов, во всем диапазоне перемещения поршня 34 гидроусилителя. Хотя пружины требуют дополнительного усилия для преодоления их сопротивления, но они обеспечивают стабильность в том смысле, что иначе инерция поршней насоса будет стремиться сдвинуть насос с точки нулевого рабочего объема.
Приведенное клапанное устройство 24 настраивает давление, воздействующее на гидроусилитель 22, в соответствии с сигналами от модуля 20 управления. Клапанное устройство 24 содержит первый и второй клапаны 47 и 48 регулировки давления. Первый клапан 47 регулировки давления соединен с модулем 20 управления и первой стороной 38 гидроусилителя 22, а второй клапан 40 регулировки давления соединен с модулем 20 управления и второй стороной 40 гидроусилителя 22. Первый и второй клапаны 47 и 48 регулировки давления выдают известные давления как функцию входного командного сигнала с модуля 20 управления. Следует иметь в виду, что и другие сочетания клапанов могут быть использованы для удовлетворения требований конкретного варианта реализации.
Датчики 50 давления дополнительно включены в состав устройства привода и работают совместно с первым и вторым клапанами 47 и 48 регулировки давления, обеспечивая контроль текущих значений давлений, прикладываемых к гидроусилителю 22. Датчики 50 давления связаны с модулем 20 управления, обеспечивая выдачу информации, используемой для управления крутящим моментом в соответствии с описанными принципами, как это будет описано более детально ниже, а также для учета потерь потока в клапанах, различий между клапанами и нелинейности работы клапанов. Датчики 52 давления дополнительно включены в состав гидростатического устройства 16 с целью более точного контроля крутящего момента. Дополнительные системы датчиков могут также использоваться для улучшения диагностических функций и выявления неисправностей.
Как указано выше, описываемые принципы позволяют управлять крутящим моментом посредством управления давлением гидроусилителя, что предпочтительно для многих условий окружающей среды по сравнению традиционными схемами управления, например управления скоростью вращения посредством управления рабочим объемом насоса. Параметры, учитываемые при осуществлении устройства управления крутящим моментом в описываемом контексте, включают в себя коэффициент жесткости пружин гидроусилителя, а также предварительное напряжение, под которым устанавливают пружины. Другим фактором, влияющим на работу системы управления крутящим моментом, является угол плоского распределителя насоса в насосе гидравлического устройства 16, как это будет видно при рассмотрении карты управления давлением гидроусилителя.
На фиг.2 показана карта 200 для настройки давления (или разности давлений) гидроусилителя для получения необходимого крутящего момента. Изобретателями учтено, что крутящий момент, создаваемый мотором гидравлического устройства 16, передается обратно через насос гидравлического устройства 16 на сам гидроусилитель. Этот механизм обратной связи может также трактоваться как «поворотная сила». При создании некоторого давления гидроусилителя устройство создает соответствующий крутящий момент мотора. При изменении нагрузки на мотор сила, передаваемая обратно на гидроусилитель, меняется, приводя, в свою очередь, к изменению позиции поршня гидроусилителя. Однако давление гидроусилителя поддерживается постоянным, тем самым сохраняя крутящий момент на соответствующем уровне. Поэтому нет необходимости явно контролировать выходную скорость вращения и управлять обратной связью крутящего момента с целью контроля перегрузки и помпажа мотора, т.к. обратная связь на управляемый давлением гидроусилитель приводит к перемещению поршня гидроусилителя и тем самым поддерживает выходной крутящий момент на необходимом уровне, независимо от скорости вращения.
Приведенная карта 200 показывает прикладываемую к гидроусилителю разность давлений при скорости вращения 1800 об/мин, чтобы насос 26 переменного рабочего объема выдавал необходимый крутящий момент при текущем отношении оборотов мотора (отношении оборотов мотора к оборотам насоса). Как и у всех карт, созданных при следовании описанным принципам, карта 200 по существу лишена разрывов и плоских участков, т.е. по существу монотонна в любом измерении. Модуль 20 управления управляет давлением гидроусилителя посредством клапанного устройства 24. Карта 200 соотносит усилие гидроусилителя и нормализованного отношения оборотов мотора к необходимому выходному крутящему моменту мотора. Такое соотношение может быть также отображено для заданного давления в контуре. Давление в контуре также соотносится с крутящим моментом через посредство постоянного рабочего объема мотора. Давление в контуре может также соотноситься с крутящим моментом мотора с переменным рабочим объемом, когда рабочий объем мотора задан конкретно или известен благодаря измерению. Крутящий момент мотора является функцией выходного крутящего момента через посредство механического понижения в редукторном устройстве 12. Обороты насоса переменного рабочего объема известны благодаря первому датчику 30 оборотов. Угол хода насоса переменного рабочего объема обычно пропорционален нормализованному отношению оборотов мотора, представляющему собой отношение оборотов мотора постоянного рабочего объема к оборотам насоса переменного рабочего объема. Нормализованное отношение оборотов мотора вычисляют в модуле 20 управления на основании входных сигналов от первого и второго датчиков 30 и 32 оборотов.
Модуль 20 управления обращается к карте 200 для определения давления гидроусилителя, которое необходимо приложить к гидроусилителю 22. После определения надлежащего давления гидроусилителя клапанное устройство 24 создает надлежащее давление. Следует отметить, что для различных оборотов насоса используют различные поверхности карты. Следует также заметить, что для систем с несколькими гидронасосами для каждого гидронасоса требуется своя собственная карта. Для достижения необходимого отклика машины и выдачи необходимого крутящего момента модуль 20 управления получает входную информацию от источника команд и от входного модуля 18. Источник команд задает предустановленные критерии, параметры или условия входному модулю 18. Модуль 20 управления обрабатывает входную информацию с целью определения необходимого крутящего момента для данного входного сигнала, определяет обороты насоса, определяет нормализованное отношение оборотов мотора и обращается к карте 200 (или к другой карте), чтобы определить необходимое усилие гидроусилителя для создания необходимого рабочего объема насоса 26 переменного рабочего объема. В ответ на сигнал, означающий требуемое усилие гидроусилителя, первый и второй клапаны 47 и 48 регулировки давления совместно обеспечивают конкретное давление (разность давлений) для гидроусилителя. После этого мотор 28 выдает необходимый крутящий момент.
Отсюда следует, что надлежащее конфигурирование системы и точное построение результирующей карты 200 крутящий момент-давление помогают обеспечить надлежащее функционирование данного устройства. Как отмечено выше, насос гидравлического устройства 16 включает в себя один или несколько плоских распределителей насоса, и надлежащее пошаговое перемещение или регулирование времени работы плоских распределителей задает крутизну изменения давления гидроусилителя в зависимости от системного давления (крутящего момента мотора), как это можно видеть из фиг.3. В частности, на фиг.3 показан график зависимости давления гидроусилителя (разности давлений в фунтах на квадратный дюйм), откладываемого по оси абсцисс от крутящего момента мотора (в дюймофунтах), откладываемого по оси ординат, для заданных оборотов насоса (1300 об/мин в приведенном примере). Ось нормализованного отношения оборотов насоса перпендикулярна показанным осям, а многочисленные кривые представляют различные отношения оборотов мотора в обоих направлениях.
Желательно максимизировать управляемость крутящего момента мотора при небольших оборотах насоса для достижения высокой устойчивости системы. С этой целью большая крутизна давления гидроусилителя в любом направлении означает более высокую разрешающую способность и таким образом лучшую управляемость. Однако имеются пределы крутизны, которые могут быть обеспечены. Как можно видеть, на соотношение между давлением гидроусилителя и крутящим моментом мотора влияют как жесткость/предварительное напряжение пружины, так и регулирование времени срабатывания плоского распределителя. Что касается регулирования времени работы плоского распределителя, то увеличение времени работы плоского распределителя приводит к увеличению крутизны зависимости.
Увеличение времени работы плоского распределителя позволяет более тонко регулировать крутящий момент посредством давления гидроусилителя. Однако гидравлические системы подачи имеют конечное давление подачи, и жесткость пружины и время работы плоского распределителя не могут быть настроены таким образом, чтобы максимально возможный крутящий момент стал бы недостижимым из-за ограниченного управляющего усилия гидроусилителя. Более того, чрезмерно большое время работы плоского распределителя приводит к увеличению шумов насоса до некомфортного для оператора машины уровня. В одном из вариантов осуществления пружины гидроусилителя имеют большую жесткость и нулевое предварительное напряжение. В конкретном варианте осуществления комплект пружин содержит собранные в блок коаксиальные пружины для получения необходимой жесткости.
В данных вариантах осуществления, когда не прикладывается никакого давления (разности давлений) к гидроусилителю, гидроусилитель возвращается к состоянию нулевого рабочего объема насоса, но жесткости пружин недостаточно, чтобы снизить максимальный располагаемый крутящий момент. В пределах этих ограничений крутизна кривой давления гидроусилителя в зависимости от отношения оборотов мотора максимизирована для улучшения управляемости мотора на больших оборотах насоса при разомкнутой петле. Не следует выбирать пружины или время работы плоского распределителя, которые приводят к разрывам кривых, что может приводить к неустойчивости управления системой.
Чертеж фиг.4 подобен чертежу фиг.3, но иллюстрирует набор кривых давление/крутящий момент мотора для иных оборотов насоса, например 3000 об/мин. При сравнении фиг.3 и фиг.4 становится понятным, что крутизна давления гидроусилителя в зависимости от отношения оборотов мотора (интервалы между линиями) выше на малых оборотах насоса, таким образом, обеспечивая улучшенное разрешение управления. Далее, как отмечено выше, хотя это и не очевидно из графиков, крутизна давления гидроусилителя в зависимости от отношения оборотов мотора может быть также увеличена путем увеличения жесткости пружин в пределах указанных ограничений. Наконец, как видно из приведенных на фиг.3 и фиг.4 графиков, крутизна давления гидроусилителя в зависимости от крутящего момента мотора меньше при низких оборотах насоса, чем при высоких, которые предпочтительно выбираются таким образом, чтобы жесткость пружин не ограничивала располагаемый крутящий момент.
Резюмируя вышеизложенное, можно видеть, что крутизна управления отношением оборотов мотора может быть максимизирована путем увеличения жесткости пружин, в то время как крутизна управления крутящим моментом мотора может быть максимизирована путем увеличения времени работы плоского распределителя. Подобную оптимизацию проводят при выборе конфигурации гидравлического устройства 16, одновременно обеспечивая, чтобы не было превышено давление подпитки при любом рабочем состоянии вариатора, и чтобы шумы насоса и мгновенное давление на плоском распределителе оставались в заранее заданных пределах с целью снижения шумов насоса и увеличения срока службы насоса.
Несмотря на то что можно использовать теоретически полученные карты давление/крутящий момент, желательно в варианте осуществления создать эмпирическую карту давление/крутящий момент, используя надлежащим образом скомпонованное гидравлическое устройство 16, так что полученная карта учитывает потери при передаче, такие как течь, а также потери в редукторе, потери из-за трения в гидроусилителе, из-за гистерезиса и потери в вариаторе. Несмотря на то что любая такая карта будет зависеть от точного размера системы, типа, конфигурации и т.д., график, приведенный на фиг.2, может являться примером соответствующей эмпирической карты.
Управление крутящим моментом на основе данной карты (и аналогично полученным картам для различных оборотов гидронасоса) обеспечивает плавное перемещение и лучшую общую плавность системы. Данный тип управления обеспечивает более интуитивный опыт торможения по сравнению с традиционными системами управления скоростью вращения.
По мере возрастания сопротивления движению машины, например, если машина сдвигает кучу земли или камня или машина поднимается на холм, обороты мотора меняются. Соответственно меняется нормализованное отношение оборотов мотора. Модуль 20 управления распознает изменение, обращается к соответствующей карте и определяет новое давление гидроусилителя, необходимое для поддержания заданного крутящего момента. Соответственно, модуль управления посылает сигнал на клапаны 47 и 48 регулирования давления для настройки давлений в гидроусилителе в соответствии с определенным дифференциальным давлением гидроусилителя. Клапаны регулирования давления обеспечивают необходимое определенное давление (разность давлений) гидроусилителя 22.
Описанные принципы применимы к машинам и устройствам, в которых используется гидравлическое устройство с насосом переменного рабочего объема и для которых важны плавность действия и быстрая реакция на изменение окружающих условий. В таком контексте описываемая система способствует управлению крутящим моментом с помощью регулирования давления гидроусилителя.
На фиг.5 показана блок-схема последовательности операций процесса 500 управления передачей в привязке к гидромеханической передаче, имеющей вариатор, как он показан, или подобно тому, что показан на фиг.1. Процесс 500 начинается на этапе 501 с приема сигнала управления, означающего желаемый выходной крутящий момент. Затем, на этапе 503, система определяет обороты насоса и отношение оборотов мотора (или нормализованное отношение оборотов мотора). На этапе 505 процесс использует карту крутящий момент/давление для определения необходимого давления гидроусилителя для обеспечения желаемого крутящего момента при заданных оборотах мотора и оборотах насоса. Данный процесс может использовать стандартную технологию интерполяции или экстраполяции. Наконец, на этапе 507 система посылает сигналы, например сигналы в виде электрического тока для активации одного или более клапанов регулирования давления для создания определенного давления или разности давлений, прикладываемых к гидроусилителю, тем самым заставляя мотор выдавать на выходе необходимый крутящий момент. Отношение оборотов мотора, обороты насоса и вход управляющего сигнала (служащий для сигнализации необходимого крутящего момента) могут контролироваться, как показано на этапе 509, с целью определения, требует ли изменение условий иного давления гидроусилителя. Следует иметь в виду, что предыдущее описание представляет собой примеры раскрываемого устройства и технологии. Однако предполагается, что другие варианты осуществления настоящего изобретения могут отличаться в деталях от приведенных примеров. Все ссылки на раскрытие или примеры к нему имеют целью отсылку к конкретным примерам, рассматриваемым в данном месте, и не имеют целью наложить какие-либо ограничения на общий объем настоящего изобретения. Всякое подчеркивание отличий или принижение значения некоторых свойств призвано показать отсутствие предпочтения для таких свойств, но не исключить такие свойства полностью из объема настоящего раскрытия, если только об этом не сказано прямо.
Перечисление диапазонов значений в данном документе является лишь быстрым способом отсылки конкретно к каждому отдельному значению, падающему в диапазон, если только не указано иное, и каждое отдельное значение включено в настоящую спецификацию, как если бы оно было изложено отдельно в настоящем документе. Все способы, описанные в данном документе, могут быть реализованы в любом подходящем порядке, если только иное не указано в настоящем документе или иначе явно не следует из контекста.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫСОКОМОМЕНТНЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ ГИДРОМЕХАНИЧЕСКИЙ ВАРИАТОР | 2007 |
|
RU2347966C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ГИДРОМЕХАНИЧЕСКИЙ ВАРИАТОР | 2006 |
|
RU2298125C1 |
| Двухконтурный гидравлический при-ВОд КОлЕС ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU821238A1 |
| Транспортное средство Исина | 1985 |
|
SU1294646A1 |
| ГИДРАВЛИЧЕСКИЙ ВАРИАТОР (ВАРИАНТЫ) | 2006 |
|
RU2419011C2 |
| СПОСОБ ПОВОРОТА ДВИЖИТЕЛЯМИ И УСТРОЙСТВО РУЛЕВОЕ ТРАКТОРА | 2010 |
|
RU2430851C1 |
| РЕГУЛЯТОР ПЕРЕДАТОЧНЫХ ОТНОШЕНИЙ ДЛЯ ГИДРОСТАТИЧЕСКОЙ ТРАНСМИССИИ (ВАРИАНТЫ) | 1995 |
|
RU2136992C1 |
| Гидрообъемно-механическая трансмиссия тяжеловозного транспортного средства | 2016 |
|
RU2613143C1 |
| САМОРЕГУЛИРУЮЩАЯСЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2004 |
|
RU2268425C2 |
| Двухконтурный гидравлический привод колес транспортного средства | 1981 |
|
SU954263A1 |
Изобретение относится к способу конфигурирования гидромеханической передачи. Гидромеханическая передача содержит гидронасос, приводимый в действие гидромотором, и управляемый давлением гидроусилитель, использующий частную характеристическую кривую крутящий момент/давление. Результирующая четырехмерная взаимосвязь давления гидроусилителя, оборотов мотора, оборотов первичного источника энергии и крутящего момента мотора позволяет выбирать давление гидроусилителя для обеспечения необходимого крутящего момента. Достигается повышение надежности. 9 з.п. ф-лы, 5 ил.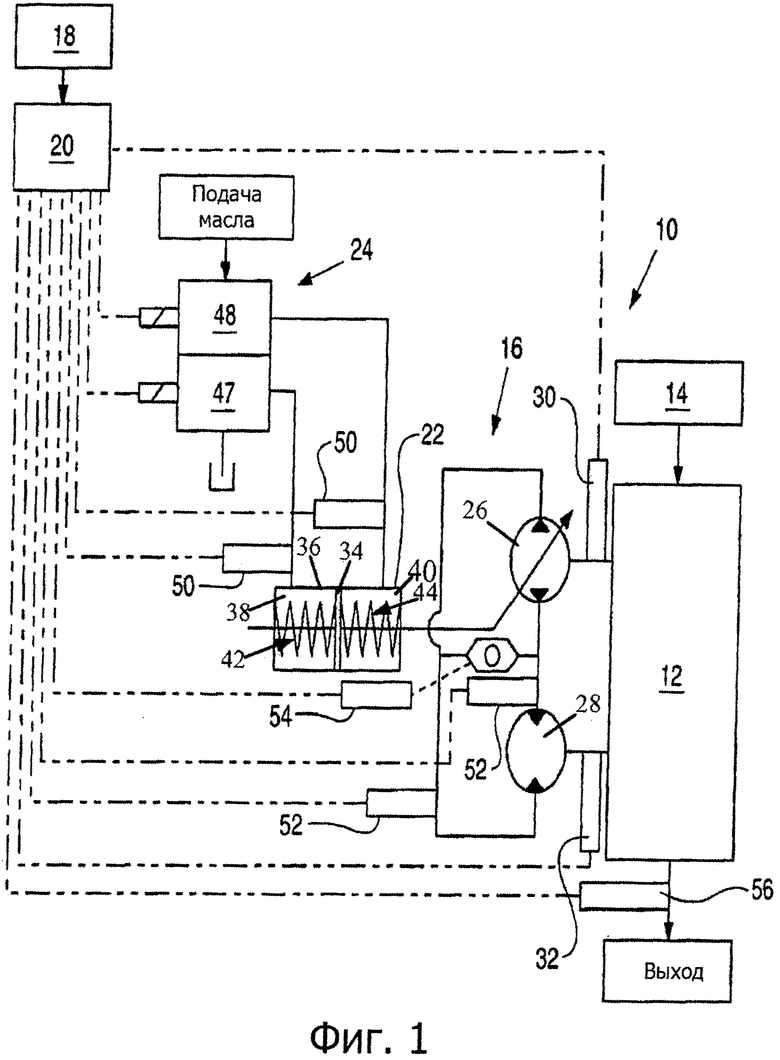
1. Способ конфигурирования передачи (10), имеющей вход от двигателя для получения мощности от первичного источника (14) энергии и вход от мотора, связанный с гидравлическим вариатором, содержащим гидронасос (26) и гидромотор (28), приводимый в действие гидронасосом, вариатор, в свою очередь, включающий в себя управляемый давлением гидроусилитель (22) для управления рабочим объемом гидронасоса, способ, включающий в себя:
создание характеристической кривой (300, 400) крутящий момент/давление для передачи (10), где характеристическая кривая (300, 400) крутящий момент/давление соотносит выходной крутящий момент мотора к оборотам мотора, давлению гидроусилителя и оборотам насоса с целью максимизации разрешения выходного крутящего момента вариатора относительно изменений давления гидроусилителя (22), при этом сохраняя характеристическую кривую (300, 400) по существу монотонной в любом измерении при любых возможных оборотах мотора, не выходя за предустановленные пределы оборотов мотора и располагаемые пределы давления гидроусилителя; и
конфигурирование передачи (10) для выдачи крутящего момента путем определения прикладываемого давления гидроусилителя исходя из созданной характеристической кривой (300, 400) крутящий момент/давление, текущих оборотов мотора и текущих оборотов насоса.
2. Способ конфигурирования передачи (10) по п.1, в котором обороты мотора являются нормализованными оборотами мотора.
3. Способ конфигурирования передачи (10) по п.1 или 2, в котором передача (10) является гидростатической передачей (10).
4. Способ конфигурирования передачи (10) по п.1 или 2, в котором передача (10) является гидромеханической передачей (10).
5. Способ конфигурирования передачи (10) по п.1 или 2, в котором передача (10), в свою очередь, включает в себя один или более регулировочных клапанов (47, 48) для приложения давления с целью управления гидроусилителем (22), способ, включающий в себя:
выработку и передачу на один или более регулировочных клапанов (47, 48) одного или более сигналов активации одного или более регулировочных клапанов (47, 48), чтобы приложить определенное давление к гидроусилителю (22).
6. Способ конфигурирования передачи (10) по п.1 или 2, в котором определенное давление гидроусилителя является дифференциальным давлением.
7. Способ конфигурирования передачи (10) по п.5, далее включающий в себя осуществление контроля оборотов насоса и оборотов мотора после выполнения этапа выработки сигналов активации с целью определения необходимости изменения давления гидроусилителя.
8. Способ конфигурирования передачи (10) по п.1 или 2, в котором гидронасос включает в себя плоский распределитель насоса, имеющий угол плоского распределителя, способ, включающий в себя выбор угла плоского распределителя для плоского распределителя.
9. Способ конфигурирования передачи (10) по п.1 или 2, в котором гидроусилитель (22) содержит одну или более пружин, смещенных к центру гидроусилителя (22), способ, включающий в себя выбор жесткости одной или более соответствующих пружин для одной или более пружин гидроусилителя.
10. Способ конфигурирования передачи (10) по п.1 или 2, в котором создание характеристической кривой (300, 400) крутящий момент/давление для передачи (10) включает в себя приложение множества давлений гидроусилителя при множестве оборотов мотора и оборотов насоса для выработки соответствующего множества крутящих моментов мотора и регистрации соответствующего множества крутящих моментов мотора в привязке к прилагаемым давлениям гидроусилителя, оборотам мотора и оборотам насоса с целью создания характеристической кривой (300, 400) крутящий момент/давление для передачи (10).
| US 3590577 A, 06.07.1971 | |||
| 0 |
|
SU191091A1 | |
| US 5784883 A, 28.07.1998 | |||
| Устройство для аварийного ремонта повреждений трубопроводов | 1950 |
|
SU92917A1 |
| Гидромеханическая трансмиссия транспортного средства | 1985 |
|
SU1255468A1 |

