(54) ДВУХКОНТУРНЫЙ ГИДРАВЛИЧЕСКИЙ ПРИВОД КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухконтурный гидравлический при-ВОд КОлЕС ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU821238A1 |
| Гидравлический привод колеснойМАшиНы | 1979 |
|
SU806484A1 |
| Транспортное средство | 1986 |
|
SU1337288A1 |
| Транспортное средство | 1987 |
|
SU1414666A2 |
| Гидрообъемная трансмиссия много-ОСНОгО ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU819460A1 |
| Гидрообъемно-механическая трансмиссия тяжеловозного транспортного средства | 2016 |
|
RU2613143C1 |
| Транспортное средство Исина | 1985 |
|
SU1294646A1 |
| ВЫСОКОМОМЕНТНЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ ГИДРОМЕХАНИЧЕСКИЙ ВАРИАТОР | 2007 |
|
RU2347966C1 |
| РУЛЕВОЕ УПРАВЛЕНИЕ САМОХОДНОЙ МАШИНЫ | 2005 |
|
RU2297355C2 |
| Гидравлическая система транспортного средства с гидрообъемной трансмиссией | 1983 |
|
SU1150139A1 |
1
Изобретение относится к транспортному машиностроению и может быть применено в гидрообъемных трансмиссиях колесных тракторов, автомобилей и сельскохозяйственных машин.
Известен двухконтурный гидравлический привод колесных машин, содержаший гидронасос, сообщенный напорной гидролинией с делителем потока объемного типа, гидромашины которого соединены с гидромоторами и с устройством регулирования, которое выполнено в виде гидронасоса переменной производительности с приводом от вала делителя потока, причем регулятор производительности насоса кинематически связан с рулевым управлением машины I.
Недостатком этого привода является то, что при разворотах транспортного средства и поворотах с малым радиусом поворота, моменты на внутреннем к центру поворота и наружном колесах одинаковы и разворачиваюший момент, способствующий раз-вороту транспортного средства, не возникает.
Известен также двухконтурный гидравлический привод колес транспортного средства, содержащий управляемый гидронасос, сообщенный напорной гидролинией с делителем потока объемного типа, имеющим две гидромащины, связанные кинематически между собой и гидролиниями с соответствующими гидромоторами привода колес транспортного средства и с устройством регулирования, которое выполнено в виде гидронасоса переменной производительности с приводом от вала делителя потока, причем регулятор производительности гидронасоса устройства регулирования кинематически связан с рулевым управлением транспортного средства, управляемый фрикционный вариатор, установленный в упомянутой кинематической цепи, механизм управления которым связан с датчиком угла крена транспортного средства 2.
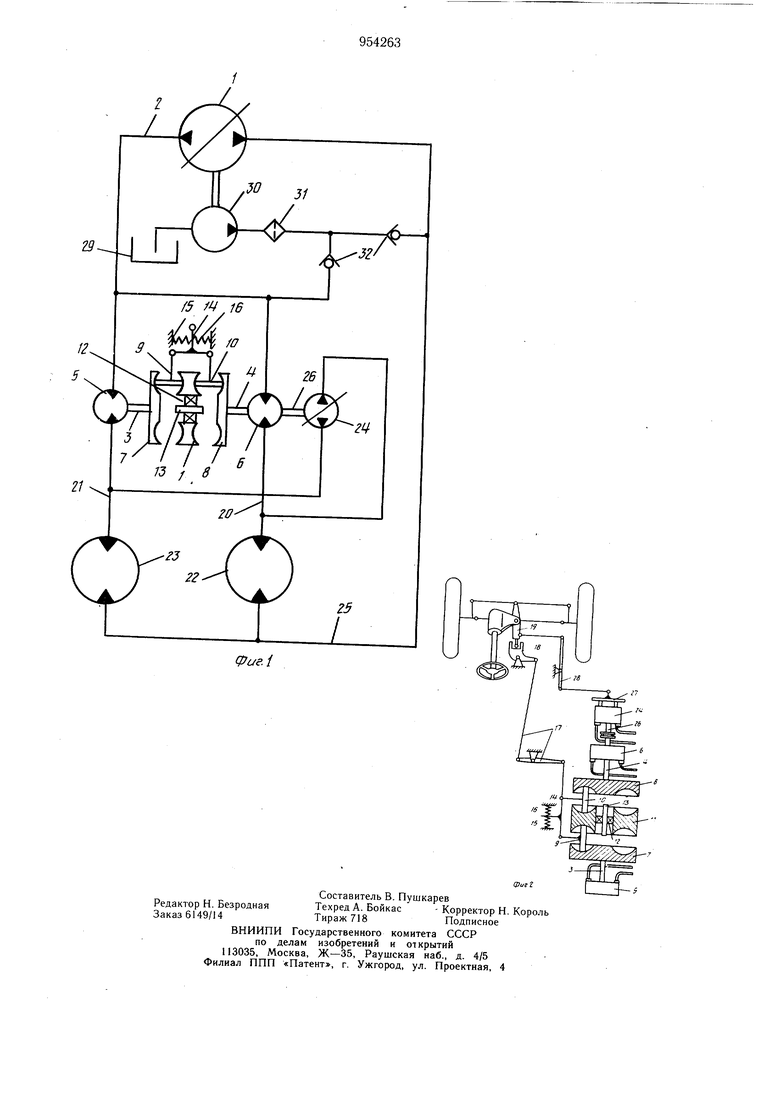
Недостатком транспортных средств с таким приводом является то, что при разворотах они не могут осуществлять разворот 20 на месте, повороте рулевого управления изменяются частоты вращения ведущих колес, а подводимые .моменты остаются одинаковыми. Это приводит к уменьшению поворотности транспортного средства. Цель изобретения - улучшение маневренности транспортного средства при разворотах. Указанная цель -достигается тем, что механизм управления фрикционным вариатором кинематически связан с рулевым управлением транспортного средства. Кроме того, упомянутая кинематическая связь механизма управления фрикционным вариатором с рулевы.м управлением выполнена в. виде двух двуплечих рычагов, одно плечо каждого из которых связано соответственно с рулевым управлением посредством V-образной вилки и механизмом управления вариатором, а другие плечи связаны между собой тягой. На фиг. f изображена гидравлическая схема предлагаемого привода; на фиг. 2 - гидромеханическая схема. Двухконтурный гидавлический привод содержит гидронасос 1, сообщенный напорной гидролинией 2 с делителем потока объемного типа, на валах 3 и 4 гидромашин 5 и 6 которого жестко установлены ведущие чашки 7 и 8 фрикционного вариатора. Ведущие чашки 7 и 8 передают вращение через ролики 9 и 19 на ведомую чашку И фрикционного вариатора, установленную посредстврм подшипника 12 на оси 13. Механизм l4 управления фрикционным вариатором удерживается в среднем положении пружинами 15 и 16 и связан посредством передаточного механизма 17 и V-образного рычага 18 с рулевым управлением 19 транспортного средства. Гидромашины 5 и 6 соединены гидролиниями 20 и 21 с гидромоторами 22 и 23, которые совместно с гидромащинами 5 и 6 образуют два контура гидропередач. Кроме того, гидролинии 20 и 21 сообщены между собой посредством гидронасоса 24, а гидромоторы 22 и 23 гидролинией 25 сообщены с гидронасосом 1. Вал 26 гидронасоса 24 соединен с валом гидромашины 6. Регулятор производительности насоса 24, например шайба 27, кинематически посредством передаточного механизма 28 с рулевым управлением 19 транспортного средства. Гидравлический привод имеет также систему подпитки, содержащую гидробак 29, насос подпитки 30, фильтр 31 и клапаны 32. Гидравлический привод работает следующим образом. Жидкость из напорной гидролинии 2 поступает к гидромашинам 5 и 6 и далее к гидромоторам 22 и 23. Производительность гидронасоса 24 определяется положением регулятора производительности, кинематически связанного с рулевым управлением 19, и частотой вращения валов 4 и 26. Механизм управления 14 фрикционным вариатором пружины 15 и 16 удерживают в среднем положении и обеспечивают передаточное отношение между гидромашинами 5 и 6 равное единице. При движении транспортного средства по прямой производительность гидронасоса 24 равна нулю, а механизм управления 14 фрикционным вариатором находится в среднем положении и передаточное отнощение фрикционного вариатора равно единице. Расходы жидкости через гидромашины 5 и 6 одинаковые, а следовательно, и частоты вращения гидромоторов 22 и 23 равны между собой. Если сцепление одного из колес ухудшается, то уменьшается перепад давлений на соответствующем гидромоторе, например гидромоторе 22. В связи с этим увеличивается перепад давлений на гидромашине 5, которая начинает работать в режиме гидродвигателя и передает крутящий момент через установленную на валу 3 ведущую чащку 7 на ролик 9, который через ведомую чашку 11 и ролик 10 передает момент на ведущую чашку 8 гидромашины 6. При этом гидромашина 6 начинает работать в насосном режиме и давление в гидролинии 21 увеличивается. Повышение давления вызывает соответствующее увеличение крутяшего .мо.мента гидромотора 23. Следовательно, частоты вращения гидромоторов 22 и 23 останутся одинаковыми, а крутящий момент перераспределяется между гидромоторами. При этом суммарная сила тяги колес остается неизменной, что обеспечивает высокую проходимость транспортного средства. При движении транспортного средства на повороте с больщим радиусом регулятор производительности изменяет свое положение в соответствии с положением рулевого управления, а механизм 14 управления фрикционным вариатором останется по прежнему в среднем положении, так как рулевое управление 19 при повороте по большому радиусу пoвepнeтtя мало и не будет воздействовать на U -образный рычаг 18. При этом гидронасос 24 начинает перекачивать часть жидкости из одного контура гидропередачи в другой. Гидромоторы 22 и 23 начинают вращаться с различными частотами, что необходимо для поворота транспортного средства. Соотношение частот вращения будет определяться производительностью гидронасоса 24. Если при повороте сцепление одного из колес ухудшится, то крутящий .момент на одном ко уменьшится, а другой увеличится. Однако расходы гидромашин 5 и 6 останутся прежними, а производительность гидронасоса 24 при неизменном положении рулевого управления 19 будет зависеть от частоты вращения вала 26. Следовательно, соотношение частот вращения гидромоторов 22 и 23 останется неизменны.м. Таким образом, и при управлении машиной проходимость ее останется высокой.
При движении транспортного средства на повороте с малым радиусом поворота или развороте на места, например влево, управляемые колеса поворачиваются на большой угол и рулевое управление 19, выбрав зазор между V-образным рычагом 18, поворачивает в соответствующее положение регулятор производительности и механизм 14 управления фрикционным вариатором, деформируя пружины 15 и 16, при этом гидронасос 24 начинает перекачивать часть жидкости из одного контура гидропередачи в другой: Гидромоторы 22 и 23 начинают вращаться, с различными частотами. В данном случае гидромотор 23 начнет вращаться быстрее. Одновременно механизм 14 управления повернет ролики 9 и 10 фрикционного вариатора по часовой стрелке. При этом передаточное отнощение между чашкой 7 и чашкой 8 станет больше единицы, т. е. чашка 8 начинает вращаться быстрее чашки 7. В результате этого гидромащина 5 начинает работать в режиме гидродвигателя, а гидромашина 6 - в насосном режиме. Поэтому давление в гидролинии 20 уменьшится, что вызовет уменьшение крутящего момента гидромотора 22, а давление в гидролинии 21 увеличится, что вызовет увеличение крутя1цего момента гидромотора 23. В результате на транспортное средство будет действовать разворачивающий момент, способствующий его повороту. После окончания поворота или разворота и при переходе на движение по прямой пружин 15 и 16 возвращают механизм 14 управления фрикционным вариатором в среднее положение, крутящие моменты на гидромоторах 22 и 23 выравниваются, если соответствующие им ведущие колеса находятся в одинаковых сцепных условиях. При этом регулятор производительности также возвращается в среднее положение и частота вращения гидромоторов 22 и 23 становятся одинаковыми.
При повороте транспортного средства вправо увеличение крутящего момента уже будет на гидромоторе 22, а на гидромоторе 23 уменьщение. Это будет способствовать повороту или развороту транспортного средства вправо.
Осуществив необходимое передаточное отношение кинематических связей между рулевым упразлением, регулятором производительности насоса и механизмам управления фрикционного вариатора, а также подобрав величину зазора между рулевым управлением и L/-образным рычагом, можно обеспечить необходимую взаимосвязь положения рулевого управления и соотношения
5 частот вращения и крутящих моментов гидромоторов 22 и 23.
Использование предлагаемого двухконтурного гидравлического привода улучшает маневренность транспортного средства, а значит, повышает его производительность.
0 При этом расширяется область его использования.
Формула изобретения
Источники инфор.мации, принятые во внимание при экспертизе 451. Авторское свидетельство СССР
№ 538181, кл. F 16 Н 39/46, 1975.
