лами гидромашин делителя потока, а механизм управления вариатором кинематически связан с датчиком угла крена транспортного средства,
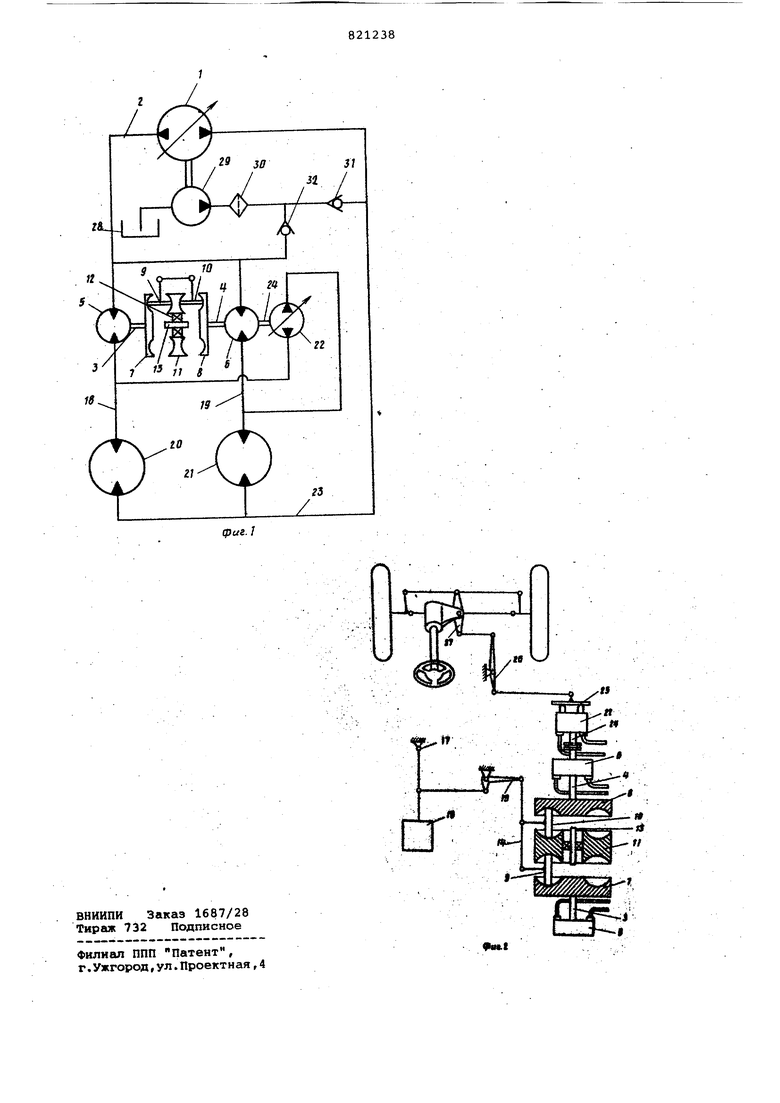
На фиг. 1 представлена гидравличекая схема двухконтурного гидравлического П1 1вояа;на фиг. 2 - гидромеханическая схема.
Двухконтурный гидравлический привод колес транспортного средства содержит управляемый гидронасос 1/ сообщенный напорной гидролинией 2 с делителетл потока объемного типа, . на валах 3 и 4 гидромашин 5 и 6 которого жестко установлены ведущие элементы 7 и 8 управляемого фрикционного вариатора. Ведущие элементы 7 и 8 связаны посредством роликов 9 и 10 с ведомым элементом 11, установленньм посредством подшипника 12 на валу 13. Механизм 14 управления вариатором посредством передаточного механизма 15 кинематически связан с угла крена, например с маятником 16, подвешенным на оси 17. Гидромашины 5 и б соединены гидролиниями 18 и 19 с гидромоторами 20 и 21, которые совместно с гидромашинами 5 и б образуют два контура гидропередачи.
Гидролинии 18 и 19 сообщены между собой посредством гидронасоса 22, а гидромоторы 20 и 21 гицролинией 23 сообщены с управляемым гидронасосом 1. Вал 24 гидронасоса 22 соединен с валом гидрсмашины б. Регулятор производительности насоса 22, например шайба 25, кинематически связан посредством передаточного механизма 26 с рулевым управлением 27 транспортного средства. Привод имеет такж систему подпитки, содержащую гидробак 28, насос подпитки 29, фильтр 30 и клапаны 31 и 32.
Двухконтурный гидравлический привод работает следующим образом.
Жидкость из напорной гидролинии 2 поступает к гидромашинам 5 и б и далее к гидромоторам 20 и 21. -Производительность гидронасоса 22 определяется положением регулятора 25 производительности, кинематически связанного с рулевым управлением 27, и частотой вращения валов 4 и 24. Положение р оликов 9 и 10 определяется положением маятника 16. При движении машины по прямой на горизонтальной прверхности производительность насоса 22 равна нулю,а ролики 9 и 10 находятся в среднем положении, т.е. передаточное отношение фрикционного вариатора равно единице. Расходе жидкости через гид:ромашины 5 и б одинаковы, а частоты вращения гйдромоторов 20 и 21 равны между собой. Если сцепление одного из колес ухудшается, то уменьшается перепад давления на соответствующем гидромо оре, например 20.
в связи с этим увеличивается перепад давлений на гидромашине 5, которая .начинает работать в режиме гидродвигателя И передает крутящий момент через установленный на валу 3 ведущий элемент 7 на ролик 9, который через ведомый элемент 11 и ролик 10 передает момент на ведущий элемент 8 гидромашины 6. При этом гидромашина б начинает работать в насосном режиме и давление в гидролинии 19 увеличивается. Повышение- давления вызывает соответствующее увеличение крутящего момента гидромотора 21. Следовательно,частоты вращения гидромоторов 20 и 21 останутся одинаковыми, а крутящий момент перераспределяется между гидромоторами. При этом суммарная сила тяги колес остается неизменной, что обеспечивает высокую проходимость машины.
При движении машины при повороте на горизонтальной поверхности регулятор 25 производительности изменяет свое положение в соответствии с положением рулевого управления. При этом гидронасос 22 начинает перекачивать часть жидкости из одного контура гидропередачи в другой. Гидромоторы 20 и 21 начинают вращаться с различными частотами, что необходимо для поворота машины. Соотношение частот вращения определяется производительностью гидронасоса 22. Если при повороте сцепление одного из колес ухудшится, то крутящий момент одного колеса уменьшится, а другого увеличится. Однако расходы гидромашин 5 и б останутся одинаковыми, как и при движении машины по прямой , а производительность гидронасоса 22 при неизменном положении рулевого управления 27 будет зависеть от частоты вращения вала 24. Следовательно, соотношение частот вращения гидромоторов 20 и 21 останется неизменным. Таким образом, и при управлении машиной проходимость ее остается высокой.
При движении машины по прямой на поперечном, например правом склоне, маятник 16, подвешенный на оси 17, поворачивается против «сасовой стрелки под действием силы тяжести на угол, равньЕй углу поперечного склона, и также поворачиваются посредством механизмов 14 и 15 ролики 9 и 10 по часовой стрелке. При этом передаточное отнсяление между ведущи элементом 8 станет больше единицы, т.е. он начнет вращаться быстрее ведущего -элемента 7. В результате этого гидромашииа 5 начинает работать в режиме гидродвигателя, а гидромаьшна б - в насосном режиме. Поэтому давление в гидролинии 18 уменьшается, что вызывает уменьшение крутящего момента гидродвигателя 20, а давление в гидролинии 19 увеличивается, что вызывает увеличение крутящего момента гидромашины 21.Следовательно частоты вращения гидромоторов 20 и 21 остаются одинаковыми,а крутящий момент перераспределяется между ними а именно,на нижний по склонугидромотор 21 подводится больший момент а на верхний по. склону гидромоторов 20 - меньший. .
На левом склоне маятник 16 посредством механизмов 14 и 15 поворачивает ролики 9 и 10 против часовой стрелки. При этом передаточное отношение между ведущими элементами 7 и 8 станет меньше единицы. В результате этого гидромашина.б работает в режиме гидродвигателя, а гидромашина 5 - в насосном режиме. В этом случае крутящий момент уменьшается на гидромоторе 21 и увеличивается на гидромоторе 20. В результате перераспределение моментов на машину действует разворачивающий момент, направленный вверх по склону, что способствует повышению курсовой устойчивости на поперечном склоне. При этом суммарная сила тяги колес остаётся, неизменной, что обеспечивает высокие тягово-сцепные качества машины на поперечном склоне.
При повороте машины, движущейся на поперечном склоне/ регулятор 25 производительности изменяет свое положение в соответствии с положением рулевого управления. При этом гидронасос 22 начинает перекачивать часть рабочей жидкости из одного контура гидропередачи в другой. Гидромоторы 20 и 21 начинают вращаться с различными частотами, что и необ.ходимо для поворота машины. Частота вращения вала 24 гидронасоса 22 однозначно взаимосвязана с частотами вреицения гидромоторов 20 и 21 и со скоростью движения машины. В связи с этим, осуществляя необходимое передаточное отношение кинематической связи между рулевым управлением и регулятором производительности, обеспечивается необходимая взаимосвязь положения рулевого управления и соотношения Частот вращения гидромоторов 20 и 21. Перераспределение ведущего крутящего момента
между гидромоторами 20 и 21 зависит от величины передаточного отношения фрикционного вариатора. Следовательно, осуществив необходимое передаточное отношение кинематической связи между механизмами 9 и 10 управления роликами к датчиком угла склона, добиваются необходимого перераспределения ведущего момента между верхним и нижним по склону колесом в зависимости от крутизны склона.
Формула изобретения
Двухконтурный гидравлический при5вод колес транспортного средства, содержащий управляемый гидронасос, сообщенный напорной гидролинией с (делителем потока объемного типа, имеющим две гидромашины, связанные
0 кинематически между собой и гидролиниями с соответствующими гидромоторами привода колес транспортного средства и с устройством регулирования, которое выполнено в виде гидро5насоса переменной производительности с приводом от вала делителя потока, причем регулятор производительности гидронасоса устройства регулирования Кинематически сйязан с рулевым управ0лением транспортного средства, о тличающийся тем, что, с целью повышения тягово-сцепных качеств и курсовой устойчивости транспортного средства при движении на
5 поперечном склоне, он снабжен датчиком угла крена транспортного средства и управляемым фрикционным вариатором, установленным в упомянутой кинематической цепи, причем ведущие элементы вариатора жестко связаны
0 с соответствующими валами гидромашин делителя потока, а механизм управления вариатором кинематически связан с датчиком угла крена транспортного средства.
5
Источники информации, принятые во внимание при экспертизе
1. Патент Франции 2199836,
0 кл. F 16 Н 39/00, 1974.
. 2. Авторское свидетельство СССР 538181, кл. F 16 Н 39/46, 1975.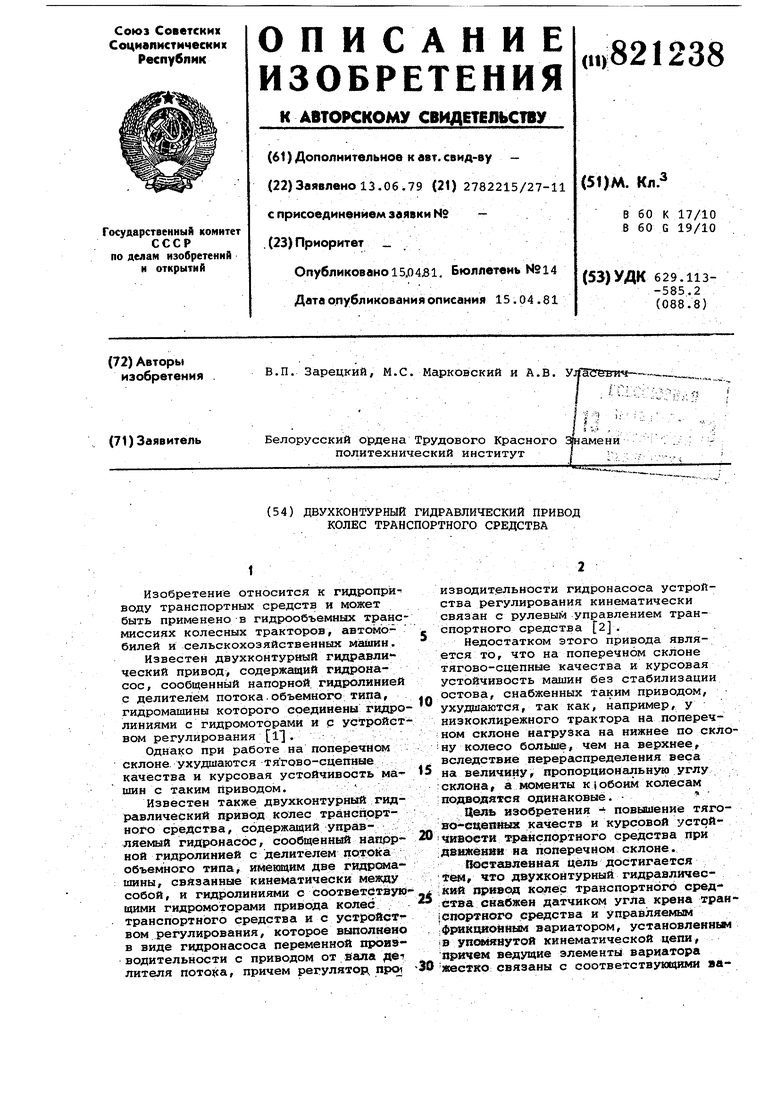
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухконтурный гидравлический привод колес транспортного средства | 1981 |
|
SU954263A1 |
| Гидравлический привод колеснойМАшиНы | 1979 |
|
SU806484A1 |
| Транспортное средство | 1987 |
|
SU1414666A2 |
| Транспортное средство | 1986 |
|
SU1337288A1 |
| Гидрообъемно-механическая трансмиссия тяжеловозного транспортного средства | 2016 |
|
RU2613143C1 |
| ВЫСОКОМОМЕНТНЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ ГИДРОМЕХАНИЧЕСКИЙ ВАРИАТОР | 2007 |
|
RU2347966C1 |
| ГИДРАВЛИЧЕСКАЯ ПЕРЕДАЧА | 2014 |
|
RU2557105C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ГИДРОМЕХАНИЧЕСКИЙ ВАРИАТОР | 2006 |
|
RU2298125C1 |
| РУЛЕВОЕ УПРАВЛЕНИЕ САМОХОДНОЙ МАШИНЫ | 2005 |
|
RU2297355C2 |
| Гидрообъемная трансмиссия много-ОСНОгО ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU819460A1 |