Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к моторному транспортному средству, имеющему устройство подвески транспортного средства, поддерживающее кузов транспортного средства, и к способу управления выполнением руления для управляемого колеса.
Уровень техники
[0002] В устройстве подвески транспортного средства намеченная характеристика подвески реализована посредством задания оси поворотного шкворня.
В технологии, раскрытой в патентном документе 1, например, тяги выполнены с возможностью ограничивать перемещение в направлении вперед и назад транспортного средства верхних и нижних точек поворота, формирующих поворотный шкворень, во время руления и, вследствие этого, улучшать стабильность и управляемость.
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP 2010-126014 A
Сущность изобретения
Задача, которая должна быть решена изобретением
[0004] Тем не менее, технология этого патентного документа не уделяет внимания влиянию боковой силы, введенной в точке контакта шины и земли в соответствии со скоростью движения транспортного средства в случае операции выполнения руления во время движения транспортного средства. Соответственно, существует запас для улучшения касательно уменьшения момента вокруг оси поворотного шкворня во время операции выполнения руления. Таким образом, в устройстве подвески традиционного транспортного средства, существует запас для улучшения касательно повышения стабильности и управляемости.
Цель настоящего изобретения заключается в том, чтобы улучшить стабильность и управляемость моторного транспортного средства, включающего в себя устройство подвески.
Средство решения задачи
[0005] Чтобы разрешать вышеуказанную проблему, моторное транспортное средство согласно настоящему изобретению включает в себя устройство подвески, содержащее первый и второй элементы тяг, соединяющие механизм ступицы колеса и кузов транспортного средства на нижней стороне от полуоси в направлении вверх и вниз транспортного средства в пересекающейся компоновке, в которой первый и второй элементы тяг пересекают друг друга при просмотре в виде сверху транспортного средства.
Кроме того, ось поворотного шкворня, проходящая через верхнюю точку поворота устройства подвески и нижнюю точку поворота, расположенную в точке пересечения первого элемента тяги и второго элемента тяги установлена с возможностью проходить через поверхность контакта шины и земли или пятно контакта в нейтральной позиции рулевого колеса.
Кроме того, обеспечено устройство управления выполнением руления для выполнения руления управляемым колесом посредством образования восстанавливающей силы для стабилизации (самовыравнивания) управляемого колеса посредством приведения в действие актуатора.
Результат изобретения
[0006] Согласно настоящему изобретению, возможно задать воображаемую нижнюю точку поворота в позиции ближе к транспортному средству на внутренней стороне в направлении ширины транспортного средства, и, следовательно, уменьшить момент вокруг оси поворотного шкворня. Следовательно, возможно выполнить операцию выполнения руления с меньшей осевой силой зубчатой рейки и управлять направлением колеса с меньшей силой.
Более того, возможно обеспечить способность к прямолинейному движению транспортного средства посредством приложения восстанавливающей силы для стабилизации (самовыравнивания) управляемого колеса посредством приведения в действие актуатора.
Следовательно, возможно улучшить стабильность и управляемость моторного транспортного средства.
Краткое описание чертежей
[0007] Фиг. 1 является схематичным видом, показывающим конструкцию моторного транспортного средства 1 согласно первому варианту осуществления настоящего изобретения.
Фиг. 2 является видом в перспективе, схематично показывающим конструкцию устройства 1B подвески.
Фиг. 3 является видом в плане, схематично показывающим конструкцию устройства 1B подвески.
Фиг. 4 показывает вид спереди в частичном сечении и вид сбоку в частичном сечении, схематично показывающие конструкцию устройства 1B подвески.
Фиг. 5 является видом, показывающим взаимосвязь между ходом зубчатой рейки и осевой силой зубчатой рейки во время операции выполнения руления.
Фиг. 6 является видом, показывающим траекторию или след центра поверхности контакта или пятна контакта шины и земли во время операции выполнения руления.
Фиг. 7 является видом изоплетической схемы, показывающей один пример распределения осевой силы зубчатой рейки в системе координат с использованием, в качестве осей, поперечного наклона поворотного шкворня и радиуса плеча обкатки колеса.
Фиг. 8 является схематичным видом, показывающим пример, в котором устройство 1B подвески формируется с помощью системы подвески работающего на сжатие типа.
Фиг. 9 является видом, показывающим взаимосвязь между углом схождения-расхождения колес и радиусом плеча обкатки колеса в системе подвески работающего на сжатие типа, включающей в себя элементы нижних тяг в непересекающейся компоновке и систему подвески согласно первому варианту осуществления.
Фиг. 10 является графическим видом, показывающим взаимосвязь между точкой пересечения с землей оси поворотного шкворня и боковой силой.
[0008] Фиг. 11 является концептуальным видом для иллюстрации стабилизирующего крутящего момента при задании положительного плеча обкатки колеса.
Фиг. 12 является видом, схематично показывающим взаимосвязь между поперечным наклоном (углом поперечного наклона) поворотного шкворня и радиусом плеча обкатки колеса.
Фиг. 13 является видом, показывающим пример конструкции, в котором первый вариант осуществления применяется к системе подвески, имеющей поворотный кулак.
Фиг. 14 является видом сбоку, показывающим устройство 1B подвески, сформированное посредством системы подвески на двойных поперечных рычагах.
Фиг. 15 является видом спереди системы подвески по фиг. 14.
Фиг. 16 является видом снизу системы подвески по фиг. 14.
Фиг. 17 является блок-схемой, показывающей конкретный пример устройства управления выполнением руления по фиг. 1.
Фиг. 18 является видом, показывающим карту управления сформированным крутящим моментом для оценки стабилизирующего крутящего момента.
Фиг. 19 показывает характеристики устройства подвески. Фиг. 19(a) является видом, показывающим взаимосвязь между углом продольного наклона поворотного шкворня и чувствительностью и стабильностью. Фиг. 19(b) является видом, показывающим взаимосвязь между плечом стабилизации и снижением боковой силы и способностью к прямолинейному движению.
Фиг. 20 показывает характеристику отклика при выполнении руления. Фиг. 20(a) является характеристической схемой, показывающей варьирование характеристики отклика транспортного средства. Фиг. 20(b) является видом, показывающим распределение по времени переключения характеристики управления.
Фиг. 21 является блок-схемой последовательности операций способа, показывающей пример процесса управления углом поворота при выполнении руления.
Фиг. 22 является схематичным видом, показывающим пример, в котором устройство 1B подвески сконструировано с помощью системы подвески работающего на растяжение типа.
Фиг. 23 является блок-схемой, показывающей пример разновидности секции управления выполнением руления в первом варианте осуществления.
Фиг. 24 является блок-схемой, показывающей другой пример разновидности секции управления выполнением руления в первом варианте осуществления.
Фиг. 25 является видом в перспективе, схематично показывающим конструкцию устройства 1B подвески согласно второму варианту осуществления.
Фиг. 26 является видом в плане, схематично показывающим конструкцию устройства 1B подвески по фиг. 25.
Фиг. 27 показывает вид спереди в частичном сечении и вид сбоку в частичном сечении, схематично показывающие конструкцию устройства 1B подвески по фиг. 25.
Фиг. 28(a) является видом в плане в частичном сечении (для левого переднего колеса), схематично показывающим конструкцию устройства 1B подвески по фиг. 25, и фиг. 28(b) является видом, показывающим пятно контакта шины и земли (для правого переднего колеса).
Фиг. 29 является схематичным видом, показывающим пример, в котором устройство 1B подвески сконструирован с помощью системы подвески работающего на сжатие типа.
Фиг. 30(a) и 30(b) являются видами, показывающими боковую силу или подруливание за счет поперечной податливости и поперечную жесткость в устройстве 1B подвески и сравнительном примере.
Фиг. 31 является видом в перспективе, схематично показывающим конструкцию устройства 1B подвески согласно третьему варианту осуществления.
Фиг. 32 является видом в плане, схематично показывающим конструкцию устройства 1B подвески по фиг. 31.
Фиг. 33(a) и фиг. 33(b) являются видом спереди в частичном сечении и видом сбоку в частичном сечении, схематично показывающими конструкцию устройства 1B подвески по фиг. 31.
Фиг. 34(a) является видом в плане в частичном сечении (для левого переднего колеса), схематично показывающим конструкцию устройства 1B подвески по фиг. 31, и фиг. 34(b) является видом, показывающим пятно контакта шины и земли (для правого переднего колеса).
Фиг. 35 является схематичным видом, показывающим пример, в котором устройство 1B подвески формируется с помощью системы подвески работающего на растяжение типа.
Фиг. 36 является видом в перспективе, схематично показывающим конструкцию устройства 1B подвески согласно четвертому варианту осуществления.
Фиг. 37 является видом в плане, схематично показывающим конструкцию устройства 1B подвески по фиг. 36.
Фиг. 38(a) и 38(b) являются видом спереди в частичном сечении и видом сбоку в частичном сечении, схематично показывающими конструкцию устройства 1B подвески по фиг. 36.
Фиг. 39(a) является видом в плане в частичном сечении (для левого переднего колеса), схематично показывающим конструкцию устройства 1B подвески по фиг. 36, и фиг. 39(b) является видом, показывающим пятно контакта шины и земли (для правого переднего колеса).
Фиг. 40 является схематичным видом, показывающим пример, в котором устройство 1B подвески сконструировано с помощью системы подвески работающего на сжатие типа.
Фиг. 41(a) и 41(b) являются видами, показывающими боковую силу или подруливание за счет поперечной податливости и поперечную жесткость в устройстве 1B подвески и сравнительном примере.
Фиг. 42 является видом, показывающим подруливание за счет податливости под действием продольной силы в устройстве подвески и сравнительном примере.
Фиг. 43 является видом в перспективе, схематично показывающим конструкцию устройства 1B подвески согласно пятому варианту осуществления.
Фиг. 44 является видом в плане, схематично показывающим конструкцию устройства 1B подвески по фиг. 43.
Фиг. 45(a) и 45(b) являются видом спереди в частичном сечении и видом сбоку в частичном сечении, схематично показывающими конструкцию устройства 1B подвески по фиг. 43.
Фиг. 46(a) является видом в плане в частичном сечении (для левого переднего колеса), схематично показывающим конструкцию устройства 1B подвески по фиг. 43, и фиг. 46(b) является видом, показывающим пятно контакта шины и земли (для правого переднего колеса).
Фиг. 47 является схематичным видом, показывающим пример, в котором устройство 1B подвески формируется с помощью системы подвески работающего на растяжение типа.
Фиг. 48 является блок-схемой, показывающей один пример устройства управления выполнением руления согласно шестому варианту осуществления настоящего изобретения.
Фиг. 49 является блок-схемой последовательности операций способа, показывающей один пример процесса управления углом поворота при выполнении руления согласно шестому варианту осуществления.
Фиг. 50 является блок-схемой, показывающей один пример устройства управления выполнением руления согласно седьмому варианту осуществления настоящего изобретения.
Фиг. 51 является характерным видом, показывающим карту вычисления первого времени задержки, применимую в седьмом варианте осуществления.
Фиг. 52 является характерным видом, показывающим карту вычисления второго времени задержки, применимую в седьмом варианте осуществления.
Фиг. 53 является графическим видом, показывающим время задержки, заданное в соответствии с взаимосвязью между скоростью транспортного средства и угловой скоростью руления.
Фиг. 54 является блок-схемой последовательности операций способа, показывающей один пример процесса управления углом поворота при выполнении руления согласно седьмому варианту осуществления.
Фиг. 55 является блок-схемой секции управления выполнением руления для показа примера разновидности седьмого варианта осуществления.
Фиг. 56 является блок-схемой секции управления выполнением руления для показа другого примера разновидности седьмого варианта осуществления.
Фиг. 57 является блок-схемой секции управления выполнением руления для показа еще одного другого примера разновидности седьмого варианта осуществления.
Фиг. 58 является блок-схемой последовательности операций способа, показывающей один пример процесса регулирования характеристики отклика при выполнении руления в секции управления выполнением руления, показывающей пример разновидности первого, шестого и седьмого вариантов осуществления.
Оптимальный режим осуществления изобретения
[0009] Далее приводится пояснение в отношении моторных транспортных средств или автомобилей согласно вариантам осуществления настоящего изобретения со ссылкой на чертежи.
Первый вариант осуществления
Фиг. 1 является схематичным видом, показывающим конструкцию моторного транспортного средства 1 согласно первому варианту осуществления настоящего изобретения.
Как показано на фиг. 1, моторное транспортное средство 1 включает в себя кузов 1A транспортного средства, рулевое колесо 2, входной рулевой вал 3, датчик 4 угла поворота при выполнении руления, датчик 5 крутящего момента поворота при выполнении руления, актуатор 6 реакции (или силы реакции) при выполнении руления, датчик 7 угла поворота актуатора реакции при выполнении руления, актуатор 8 рулевого управления, датчик 9 угла поворота актуатора рулевого управления, выходной рулевой вал 10, датчик 11 крутящего момента поворота при выполнении руления, ведущую шестерню 12, датчик 13 угла поворота ведущей шестерни, элемент 14 рулевой зубчатой рейки, поперечные рулевые тяги 15, датчики 16 силы на валу (или осевой силы) поперечных рулевых тяг, колеса 17FR, 17FL, 17RR и 17RL, секцию 21 получения (или обнаружения) параметров состояния транспортного средства, датчики 24FR, 24FL, 24RR и 24RL скорости вращения колес, модуль или устройство 26 схемы управления/приведения в действие и механическое дублирующее средство 27.
[0010] Рулевое колесо 2 сконструировано с возможностью вращаться в качестве единого блока с входным рулевым валом 3 и передавать ввод руления, введенный водителем, на входной рулевой вал 3.
Входной рулевой вал 3 содержит актуатор 6 реакции при выполнении руления, который суммирует реакцию при выполнении руления или силу реакции при выполнении руления с вводом руления, введенным из рулевого колеса 2.
[0011] Датчик 4 угла поворота при выполнении руления предоставляется на входном рулевом валу 3 и выполнен с возможностью считывать угол поворота входного рулевого вала 3 (т.е. входной угол поворота при выполнении руления, введенный в рулевое колесо 2 водителем). Датчик 4 угла поворота при выполнении руления отправляет считываемый угол поворота входного рулевого вала 3 в модуль 26 схемы управления/приведения в действие.
Датчик 5 крутящего момента поворота при выполнении руления предоставляется на входном рулевом валу 3 и выполнен с возможностью считывать крутящий момент вращения входного рулевого вала 3 (т.е. входной крутящий момент поворота при выполнении руления, введенный в рулевое колесо 2). Датчик 5 крутящего момента поворота при выполнении руления отправляет считываемый крутящий момент вращения входного рулевого вала 3 в модуль 26 схемы управления/приведения в действие.
[0012] Актуатор 6 реакции при выполнении руления включает в себя шестерню, которая выполнена с возможностью вращаться в качестве единого блока с валом электромотора и которая зацепляется с шестерней, сформированной в части входного рулевого вала 3. Согласно команде модуля 26 схемы управления/приведения в действие актуатор 6 реакции при выполнении руления передает силу реакции вращению входного рулевого вала 3, вращаемого посредством рулевого колеса 2.
Датчик 7 угла поворота актуатора реакции при выполнении руления считывает угол поворота актуатора 6 реакции при выполнении руления (т.е. угол поворота, сформированный посредством ввода руления, передаваемого в актуатор 6 реакции при выполнении руления) и отправляет считываемый угол поворота в модуль 26 схемы управления/приведения в действие.
[0013] Актуатор 8 рулевого управления включает в себя шестерню, которая выполнена с возможностью вращаться в качестве единого блока с валом электромотора и которая зацепляется с шестерней, сформированной в части выходного рулевого вала 10. Согласно команде модуля 26 схемы управления/приведения в действие актуатор 8 рулевого управления вращает выходной рулевой вал 10.
Датчик 9 угла поворота актуатора рулевого управления считывает угол поворота актуатора 8 рулевого управления (т.е. угол поворота, сформированный посредством актуатора 8 рулевого управления для того, чтобы выполнять руление колесами) и отправляет считываемый угол поворота в модуль 26 схемы управления/приведения в действие.
[0014] Выходной рулевой вал 10 содержит актуатор 8 рулевого управления и выполнен с возможностью передавать вращение, введенное из актуатора 8 рулевого управления, на ведущую шестерню 12.
Датчик 11 крутящего момента поворота при выполнении руления предоставляется на выходном рулевом валу 10 и выполнен с возможностью считывать крутящий момент вращения выходного рулевого вала 10 (т.е. крутящий момент поворота при выполнении руления, чтобы выполнять руление колесами 17FR и 17FL через элемент 14 рулевой зубчатой рейки). Датчик 11 крутящего момента поворота при выполнении руления отправляет считываемый крутящий момент вращения выходного рулевого вала 10 в модуль 26 схемы управления/приведения в действие.
[0015] Ведущая шестерня 12 зацепляется с прямозубой шестерней, сформированной в элементе 14 рулевой зубчатой рейки, сформированном, например, посредством вала зубчатой рейки или зубчатой рейки, и выполнена с возможностью передавать вращение, введенное из выходного рулевого вала 10, в элемент 14 рулевой зубчатой рейки.
Датчик 13 угла поворота ведущей шестерни считывает угол поворота ведущей шестерни 12 (т.е. угол поворота при выполнении руления колес 17FR и 17FL, выведенный через элемент 14 рулевой зубчатой рейки) и отправляет считываемый угол поворота ведущей шестерни 12 в модуль 26 схемы управления/приведения в действие.
[0016] Элемент 14 рулевой зубчатой рейки включает в себя прямозубую шестерню, зацепленную с ведущей шестерней 12, и преобразует вращательное движение ведущей шестерни 12 в линейное (или прямолинейное) движение в направлении ширины транспортного средства. В этом варианте осуществления, элемент 14 рулевой зубчатой рейки находится на передней стороне или стороне спереди транспортного средства относительно осей передних колес, в направлении передней части транспортного средства.
Поперечные рулевые тяги 15 соединяют оба конца элемента 14 рулевой зубчатой рейки, соответственно, с рычагами с поворотными кулаками колес 17FR и 17FL через шаровые шарниры.
[0017] Датчик 16 осевой силы поперечных рулевых тяг предоставляется в каждой из поперечных рулевых тяг 15, расположенных на обоих концах элемента 14 рулевой зубчатой рейки, и выполнен с возможностью считывать осевую силу, действующую на поперечную рулевую тягу 15. Датчики 16 осевой силы поперечных рулевых тяг отправляют считываемые осевые силы соответствующих поперечных рулевых тяг 15 в модуль 26 схемы управления/приведения в действие.
Система SWB рулевого управления по проводам формируется посредством актуатора 6 реакции при выполнении руления, актуатора 8 рулевого управления, ведущей шестерни 12, элемента 14 рулевой зубчатой рейки, поперечных рулевых тяг 15 и модуля 26 схемы управления/приведения в действие.
[0018] Каждое из колес 17FR, 17FL, 17RR и 17RL сконструировано посредством присоединения шины к колесу для шины и соединено с кузовом 1A транспортного средства через систему или устройство 1B подвески. Передние колеса (17FR, 17FL) выполнены с возможностью варьировать направления колес 17FR и 17FL относительно кузова 1A транспортного средства с помощью рычагов с поворотными кулаками, которые качаются посредством поперечных рулевых тяг 15, формирующих систему SWB рулевого управления по проводам.
[0019] Секция 21 получения параметров состояния транспортного средства получает скорость транспортного средства из импульсных сигналов, представляющих скорости вращения колес, отправленные из датчиков 24FR, 24FL, 24RR и 24RL скорости вращения колес. Кроме того, секция 21 получения параметров состояния транспортного средства получает скорость проскальзывания каждого колеса из скорости транспортного средства и скорости вращения каждого колеса. Секция 21 получения параметров состояния транспортного средства отправляет такие полученные параметры в модуль 26 схемы управления/приведения в действие.
[0020] Датчики 24FR, 24FL, 24RR и 24RL скорости вращения колес отправляют соответствующие импульсные сигналы, представляющие скорости вращения колес, в секцию 21 получения параметров состояния транспортного средства и модуль 26 схемы управления/приведения в действие.
Модуль или устройство 26 схемы управления/приведения в действие является модулем для того, чтобы управлять всем моторным транспортным средством 1. На основе сигналов, принимаемых из датчиков, предоставляемых в различных частях, модуль 26 схемы управления/приведения в действие выводит различные управляющие сигналы относительно реакции при выполнении руления входного рулевого вала 3, угла поворота передних колес при выполнении руления или соединения механического дублирующего средства 27, в актуатор 6 реакции при выполнении руления, актуатор 8 рулевого управления или механическое дублирующее средство 27.
[0021] Модуль 26 схемы управления/приведения в действие дополнительно выполнен с возможностью преобразовывать величины или значения, считываемые посредством датчиков, в величины или значения, подходящие для намеченных целей. Например, модуль 26 схемы управления/приведения в действие преобразует угол поворота, считываемый посредством датчика 7 угла поворота актуатора реакции при выполнении руления, во входной угол поворота при выполнении руления, преобразует угол поворота, считываемый посредством датчика 9 угла поворота актуатора рулевого управления, в угол поворота колеса при выполнении руления, и преобразует угол поворота ведущей шестерни 12, считываемый посредством датчика 13 угла поворота ведущей шестерни, в угол поворота колеса при выполнении руления.
[0022] Модуль 26 схемы управления/приведения в действие может отслеживать угол поворота входного рулевого вала 3, считываемый посредством датчика 4 угла поворота при выполнении руления, угол поворота актуатора 6 реакции при выполнении руления, считываемый посредством датчика 7 угла поворота актуатора реакции при выполнении руления, угол поворота актуатора 8 рулевого управления, считываемый посредством датчика 9 угла поворота актуатора рулевого управления, и угол поворота ведущей шестерни 12, считываемый посредством датчика 13 угла поворота ведущей шестерни, и определять неисправности в системе рулевого управления из взаимосвязи между этими углами. После определения неисправности в системе рулевого управления модуль 26 схемы управления/приведения в действие выводит командный сигнал в механическое дублирующее средство 27, чтобы соединять входной рулевой вал 3 и выходной рулевой вал 10.
[0023] Механическое дублирующее средство 27 является механизмом для того, чтобы соединять входной рулевой вал 3 и выходной рулевой вал 10 в ответ на команду модуля 26 схемы управления/приведения в действие и тем самым обеспечивать передачу силы из входного рулевого вала 3 на выходной рулевой вал 10. Обычно, модуль 26 схемы управления/приведения в действие командует активацию состояния отсутствия соединения без соединения входного рулевого вала 3 и выходного рулевого вала 10 с механическим дублирующим средством 27. Команда соединения для того, чтобы соединять входной рулевой вал 3 и выходной рулевой вал 10, вводится из модуля 26 схемы управления/приведения в действие в механическое дублирующее средство 27, если, вследствие возникновения неисправности в системе рулевого управления, возникает необходимость в операции руления без участия датчика 4 угла поворота при выполнении руления, датчика 5 крутящего момента поворота при выполнении руления, актуатора 8 рулевого управления и т.д.
[0024] Механическое дублирующее средство 27 может состоять, например, из механизма рулевого управления кабельного типа.
Фиг. 2 является видом в перспективе, схематично показывающим конструкцию устройства подвески или системы 1B подвески согласно первому варианту осуществления. Фиг. 3 является видом в плане, схематично показывающим конструкцию устройства 1B подвески по фиг. 2. Фиг. 4(a) и фиг. 4(b) являются видом спереди в частичном сечении и видом сбоку в частичном сечении, схематично показывающими конструкцию устройства 1B подвески по фиг. 2.
[0025] Как показано на фиг. 2-4, устройство подвески или система 1B подвески поддерживает колеса 17FR и 17FL, присоединенные к механизмам WH ступиц колес, и включает в себя, на каждой из правой и левой сторон, стакан 33 полуоси, включающий в себя ось 32 или вал колеса (полуось), поддерживающую колесо 17FR или 17FL с возможностью вращения, множество элементов тяг, расположенных в направлении ширины кузова транспортного средства от поддерживающего участка на стороне кузова транспортного средства и соединенных со стаканом 33 полуоси, и пружинный элемент 34, такой как спиральная пружина.
[0026] Элементы тяг включают в себя первую тягу 37 (первый элемент тяги) и вторую тягу 38 (второй элемент тяги), которые являются элементами нижних тяг, поперечную рулевую тягу 15 (элемент поперечной рулевой тяги) и стойку (пружинный элемент 34 и амортизатор 40). В этом варианте осуществления, устройство 1B подвески является системой подвески стоечного типа, и стойка ST, сформированная в качестве единого блока посредством пружинного элемента 34 и амортизатора 40, протягивается к верхнему концу, соединенному с поддерживающим участком на стороне кузова транспортного средства, расположенным выше полуоси 32 (в дальнейшем в этом документе, верхний конец стойки ST упоминается как "верхняя точка поворота" надлежащим образом).
[0027] Первая тяга 37 и вторая тяга 38, формирующие нижние тяги, соединяют поддерживающий участок на стороне кузова транспортного средства, расположенный ниже полуоси 32, с нижним концом стакана 33 полуоси. В этом варианте осуществления, первая тяга 37 и вторая тяга 38 имеют форму I-образного рычага, независимого друг от друга. Первая тяга 37 и вторая тяга 38 соединяются с кузовом транспортного средства в двух соответствующих поддерживающих участках и соединяются со стороной полуоси 32 в двух соответствующих поддерживающих участках (соединительных участках). Кроме того, первая тяга 37 и вторая тяга 38 в этом варианте осуществления выполнены с возможностью соединять кузов 1A транспортного средства и сторону полуоси 32 (стакан 33 полуоси) друг с другом в пересекающемся или перекрещивающемся состоянии, в котором первая и вторая тяги 37 и 38 пересекают друг друга (в дальнейшем в этом документе, точка пересечения между воображаемыми тягами, сформированная посредством первой тяги 37 и второй тяги 38, упоминается как "нижняя точка поворота" надлежащим образом).
[0028] Поперечная рулевая тяга 15 находится на нижней стороне от полуоси 32 и выполнена с возможностью соединять вал 14 зубчатой рейки со стаканом 33 полуоси. Вал 14 зубчатой рейки выполнен с возможностью передавать вращающую силу (силу поворота при выполнении руления), введенную из рулевого колеса 2, и тем самым формировать силу на валу или осевую силу для поворота или руления колесами. Следовательно, стакан 33 полуоси принимает силу на валу в направлении ширины транспортного средства из поперечной рулевой тяги 15 через вал 14 зубчатой рейки в соответствии с вращением рулевого колеса 2 и, вследствие этого, поворачивает либо выполняет руление колесом 17FR или 17FL. Вал 14 зубчатой рейки находится на передней стороне от полуоси 32 в направлении вперед и назад транспортного средства.
Кроме того, стабилизатор 41 предоставляется между трубками левого и правого амортизаторов 40.
[0029] В устройстве 1B подвески согласно этому варианту осуществления ось KS поворотного шкворня задается так, что она проходит через поверхность контакта или пятно контакта шины и земли. Кроме того, ось поворотного шкворня задается таким образом, что плечо стабилизации проходит через поверхность контакта шины и земли. В частности, в устройстве 1B подвески по этому варианту осуществления, угол продольного наклона поворотного шкворня задается равным значению около нуля, и ось поворотного шкворня задается таким образом, что плечо стабилизации приближается к нулю. Это задание позволяет уменьшать крутильный крутящий момент шины или крутящий момент шины на кручение во время операции выполнения руления, чтобы выполнять руление колесом, и уменьшать момент вокруг оси KS поворотного шкворня. Кроме того, радиус плеча обкатки колеса задается как положительное плечо обкатки колеса, при котором радиус плеча обкатки колеса превышает или равен нулю. При таком задании плечо стабилизации формируется с величиной, соответствующей радиусу плеча обкатки колеса относительно угла бокового скольжения на стороне шины во время операции выполнения руления, чтобы выполнять руление колесом, и, следовательно, система подвески может обеспечивать способность к прямолинейному движению или рабочие характеристики движения по прямой.
[0030] В этом варианте осуществления, первая тяга 37 и вторая тяга 38, выступающие в качестве элементов нижних тяг, соединяют кузов 1 транспортного средства и сторону полуоси 32 (нижний конец стакана 33 полуоси) друг с другом в пересекающемся или перекрещивающемся состоянии, в котором первая и вторая тяги 37 и 38 пересекают друг друга. Эта пересекающаяся компоновка позволяет задавать поперечный наклон (угол поперечного наклона) поворотного шкворня меньшим и задавать радиус плеча обкатки колеса большим на стороне положительного плеча обкатки колеса по сравнению с непересекающейся компоновкой, в которой первая и вторая тяги 37 и 38 не пересекают друг друга. Следовательно, система подвески может снижать крутильный крутящий момент шины во время операции выполнения руления и уменьшать осевую силу зубчатой рейки, требуемую для операции выполнения руления. Кроме того, согласно этому варианту осуществления, воображаемая нижняя точка поворота перемещается к расположенной внутри или внутренней стороне кузова транспортного средства за счет действия боковой силы, действующей на колесо во время операции выполнения руления, так что можно улучшать способность к прямолинейному движению вследствие стабилизирующего крутящего момента (SAT).
[0031] В дальнейшем в этом документе подробно анализируется геометрия подвески в устройстве 1B подвески.
Анализ компонента осевой силы зубчатой рейки
Фиг. 5 является видом, показывающим взаимосвязь между ходом зубчатой рейки и осевой силой зубчатой рейки во время операции выполнения руления.
Как показано на фиг. 5, осевая сила зубчатой рейки содержит, главным образом, крутильный крутящий момент шины и крутящий момент при подъеме колеса. Из этих компонентов осевой силы зубчатой рейки, крутильный крутящий момент шины является преобладающим.
[0032] Следовательно, можно уменьшать осевую силу зубчатой рейки посредством снижения крутильного крутящего момента шины.
[0033] Минимизация крутильного крутящего момента шины
Фиг. 6 является видом, показывающим траекторию или след центра поверхности контакта шины и земли во время операции выполнения руления. Фиг. 6 показывает характеристику в случае, если перемещение центра поверхности контакта шины и земли или центра пятна контакта шины и земли является большим при операции выполнения руления, и характеристику в случае, если перемещение центра поверхности контакта шины и земли является небольшим при операции выполнения руления.
Как видно из вышеуказанного результата компонентов осевой силы зубчатой рейки, является эффективным минимизировать крутильный крутящий момент шины во время операции выполнения руления с тем, чтобы уменьшать осевую силу зубчатой рейки. Чтобы минимизировать крутильный крутящий момент шины при операции выполнения руления, уместно уменьшать траекторию центра поверхности контакта шины и земли, как показано на фиг. 6. А именно, можно минимизировать крутильный крутящий момент шины посредством задания центра поверхности контакта шины и земли и точки контакта или точки пересечения поворотного шкворня и земли в согласованной или в идентичной позиции. Конкретно, эффективно задавать плечо стабилизации равным 0 мм и радиус плеча обкатки колеса равным или превышающим 0 мм.
[0034] Влияние поперечного наклона поворотного шкворня
Фиг. 7 является видом изолинейной или изоплетической схемы, показывающей один пример распределения осевой силы зубчатой рейки в системе координат с использованием, в качестве осей, поперечного наклона поворотного шкворня и радиуса плеча обкатки колеса. Фиг. 7 показывает три изоплетических линии или линии равного значения для небольших, средних и больших значений осевой силы зубчатой рейки. Относительно ввода крутильного крутящего момента шины, по мере того, как поперечный наклон поворотного шкворня становится больше, его момент вращения становится больше, и осевая сила зубчатой рейки становится больше. Соответственно, желательно задавать поперечный наклон поворотного шкворня меньшим предварительно определенного значения. Тем не менее, из взаимосвязи с радиусом плеча обкатки колеса, можно снижать осевую силу зубчатой рейки до требуемого уровня посредством задания поперечного наклона поворотного шкворня, например, меньшим или равным 15 градусов.
[0035] Область, окруженная посредством штрихпунктирных линий с одной точкой (граничных линий) на фиг. 7, является областью, в которой поперечный наклон поворотного шкворня меньше угла в 15 градусов, что представляет собой значение, оцененное как значение, при котором боковая сила превышает предел трения, и в то же время радиус плеча обкатки колеса превышает или равен 0 мм с вышеуказанной точки зрения крутильного крутящего момента шины. В этом варианте осуществления, эта область (в направлении снижения поперечного наклона поворотного шкворня от 15 градусов по горизонтальной оси и в направлении повышения радиуса плеча обкатки колеса от нуля по вертикальной оси) трактуется в качестве области, более подходящей для задания. Тем не менее, даже в области, в которой радиус плеча обкатки колеса является отрицательным, можно получать определенное преимущество посредством показа другого состояния в этом варианте осуществления.
[0036] Конкретно, при определении радиуса плеча обкатки колеса и поперечного наклона поворотного шкворня, например, можно аппроксимировать изоплетическую линию или линию равного значения, представляющую распределение осевой силы зубчатой рейки, с помощью кривой под n градусов (n является целым числом, большим или равным 2) и использовать значение, определенное в соответствии с позицией точки изгиба кривой под n градусов (или пикового значения) в области, окруженной посредством штрихпунктирных линий с одной точкой.
[0037] Конкретные примеры конструкции
Далее приводится пояснение в отношении конкретных примеров конструкций, реализующих или осуществляющих устройство 1B подвески.
Фиг. 8 является схематичным видом, показывающим пример конструкции устройства 1B подвески с помощью устройства подвески работающего на сжатие типа (типа, в котором элементы нижних тяг находятся на задней стороне от полуоси при виде сверху транспортного средства). В примере, показанном на фиг. 8, при виде сверху транспортного средства, работающий на растяжение стержень (первая тяга 37) протягивается вдоль полуоси, и работающий на сжатие стержень (вторая тяга 38) протягивается назад от полуоси и соединяется с кузовом транспортного средства в позиции на задней стороне от полуоси.
[0038] Как показано на фиг. 8, в компоновке с двумя поворотными элементами, в которой элементы нижних тяг выполнены с возможностью пересекать друг друга в системе подвески работающего на сжатие типа, элементы нижних тяг обеспечивают такую операцию выполнения руления, чтобы направлять колесо по мере поворота внешнего колеса по внешней стороне по отношению к движению при повороте транспортного средства, посредством вращения вперед к передней части транспортного средства вокруг поддерживающих точек на стороне кузова транспортного средства (состояние, показанное посредством пунктирных линий). В этом случае, воображаемая нижняя точка поворота размещается в точке пересечения между элементами нижних тяг. Эта компоновка подвески позволяет задавать воображаемую нижнюю точку поворота в позиции на расположенной внутри стороне или внутренней стороне кузова транспортного средства по сравнению с непересекающейся компоновкой подвески, в которой элементы нижних тяг не пересекаются. Следовательно, эта компоновка подвески позволяет задавать начальный радиус плеча обкатки колеса большим в направлении положительного плеча обкатки колеса.
[0039] В системе подвески работающего на сжатие типа, показанной на фиг. 8, поскольку угол поворота работающего на сжатие стержня является большим при операции выполнения руления, воображаемая нижняя точка поворота сдвигается к внутренней стороне. В этом случае, при виде сверху транспортного средства расстояние от центровой линии шины в направлении вперед и назад шины до воображаемой нижней точки поворота перемещается в направлении внутрь от центровой линии шины на внутренней стороне центровой линии шины, и, следовательно, радиус плеча обкатки колеса становится больше в направлении к положительному плечу обкатки колеса. Следовательно, в системе подвески работающего на сжатие типа, когда применяется этот вариант осуществления, осевая сила зубчатой рейки снижается при операции выполнения руления по мере поворота внешнего колеса.
[0040] В случае системы подвески работающего на сжатие типа, в которой элементы нижних тяг не пересекаются, поскольку угол поворота работающего на сжатие стержня является большим при операции выполнения руления, воображаемая нижняя точка поворота сдвигается к внешней стороне. В этом случае, при виде сверху транспортного средства расстояние от центровой линии шины в направлении вперед и назад шины до воображаемой нижней точки поворота находится на внешней стороне центровой линии шины, и, следовательно, радиус плеча обкатки колеса становится больше в направлении к отрицательному плечу обкатки колеса. Следовательно, осевая сила зубчатой рейки увеличивается при операции выполнения руления.
[0041] Кроме того, в примере, показанном на фиг. 8, при виде сверху транспортного средства, центр колеса перемещается к внутренней стороне движения при повороте транспортного средства во время операции выполнения руления. Следовательно, система подвески может обеспечивать дополнительное преимущество от уменьшения осевой силы зубчатой рейки за счет компоновки с размещением вала 14 зубчатой рейки на передней стороне или впереди полуоси, аналогично этому варианту осуществления.
Фиг. 9 является видом, показывающим взаимосвязь между углом схождения-расхождения колес и радиусом плеча обкатки колеса в системе подвески работающего на сжатие типа, включающей в себя элементы нижних тяг в непересекающейся компоновке и систему подвески согласно этому варианту осуществления.
[0042] Как показано на фиг. 9, по сравнению с непересекающейся компоновкой элементов нижних тяг, компоновка согласно этому варианту осуществления может дополнительно увеличивать радиус плеча обкатки колеса около нейтральной позиции (в которой угол схождения-расхождения колес является нулевым). Кроме того, в направлении увеличения угла поворота при выполнении руления на поворачивающем внешнем колесе (в направлении "-" на фиг. 9), радиус плеча обкатки колеса увеличивается, и можно снижать осевую силу зубчатой рейки.
[0043] Кроме того, компоновка задания угла продольного наклона поворотного шкворня равным 0 градусов позволяет повышать жесткость подвески. Кроме того, задание плеча стабилизации равным 0 мм означает компоновку задания точки пересечения с землей оси KS поворотного шкворня в центре O контакта шины и земли поверхности контакта шины и земли (точки приложения силы), как показано по ссылке с номером 3 на фиг. 10, показывающем взаимосвязь между точкой пересечения с землей оси KS поворотного шкворня и боковой силой. При таком задании система подвески может обеспечивать существенное дополнительное преимущество от уменьшения боковой силы.
[0044] Можно снижать боковую силу даже в случае, если точка контакта или пересечения с землей оси KS поворотного шкворня находится в позиции, указываемой посредством 2 или 4 в пределах поверхности контакта шины и земли, включающей в себя центр O контакта шины и земли (точку приложения силы), по сравнению со случаем, если точка контакта с землей оси KS поворотного шкворня находится в позиции, указываемой посредством 1 или 5 за пределами поверхности контакта шины и земли, на передней стороне или задней стороне поверхности контакта шины и земли. В частности, система подвески может эффективно уменьшать боковую силу в компоновке, в которой точка контакта с землей оси KS поворотного шкворня находится на стороне спереди транспортного средства в центре контакта шины и земли (точке приложения силы), по сравнению с той, в которой точка контакта с землей оси KS поворотного шкворня находится на задней стороне транспортного средства от центра контакта шины и земли (точки приложения силы).
[0045] Способность к прямолинейному движению при положительном плече обкатки колеса
Фиг. 11 является концептуальным видом для иллюстрации стабилизирующего крутящего момента при задании положительного плеча обкатки колеса. На фиг. 11, центробежная сила действует в центре O контакта шины и земли (точке приложения силы) в направлении к внешней стороне по отношению к повороту транспортного средства во время операции выполнения руления, и боковая сила формируется в направлении к центру поворота против центробежной силы. На фиг. 11, β является углом бокового скольжения.
[0046] Как показано на фиг. 11, восстанавливающая сила (стабилизирующий крутящий момент), действующая на шину, увеличивается пропорционально сумме плеча стабилизации и увода пневматической шины.
В случае положительного плеча обкатки колеса, можно рассматривать, в качестве плеча стабилизации, расстояние εc (см. фиг. 11) от центра колеса, определенное посредством позиции опоры перпендикулярной линии, проведенной от точки контакта с землей оси поворотного шкворня, до прямой линии, протягивающейся через центр контакта шины и земли в направлении угла в бокового скольжения на стороне шины.
Следовательно, восстанавливающая сила, действующая на шину во время операции выполнения руления, становится больше по мере того, как становится больше радиус плеча обкатки колеса для положительного плеча обкатки колеса.
[0047] В этом варианте осуществления, ось поворотного шкворня задается в компоновке положительного плеча обкатки колеса, и можно обеспечивать начальный радиус плеча обкатки колеса на большом уровне по сравнению с компоновкой непересекающихся элементов нижних тяг. Следовательно, система подвески по этому варианту осуществления может уменьшать влияние на способность к прямолинейному движению посредством задания угла продольного наклона поворотного шкворня более близким к нулю. Кроме того, посредством использования режима рулевого управления по проводам, система подвески может в итоге обеспечивать намеченную способность к прямолинейному движению с помощью актуатора 8 рулевого управления.
[0048] Работа устройства подвески
Далее приводится пояснение в отношении работы устройства 1B подвески согласно этому варианту осуществления.
В системе 1B подвески согласно этому варианту осуществления два элемента нижних тяг имеют форму I-образного рычага. Работающий на сжатие стержень выполнен с возможностью идти в направлении ширины транспортного средства от стакана 33 полуоси, и работающий на растяжение стержень выполнен с возможностью идти под углом к задней части транспортного средства от нижнего конца стакана 33 полуоси в пересекающемся состоянии с пересечением работающего на сжатие стержня.
[0049] В этой компоновке, для каждого из элементов нижних тяг, прямая линия воображаемо соединяет поддерживающую точку на стороне кузова 1A транспортного средства с поддерживающей точкой на стороне осей 32. Точка пересечения этих воображаемых прямых линий служит в качестве воображаемой нижней точки поворота. Ось поворотного шкворня является прямой линией, соединяющей эту воображаемую нижнюю точку поворота с верхней точкой поворота, сформированной посредством верхнего конца стойки.
В этом варианте осуществления, ось поворотного шкворня задается так, что она проходит через точку внутри поверхности контакта шины и земли пятна контакта шины в состоянии, в котором рулевое колесо 2 находится в нейтральной позиции, и плечо стабилизации задается так, что оно находится внутри поверхности контакта шины и земли.
[0050] Например, ось поворотного шкворня задается таким образом, что угол продольного наклона поворотного шкворня равен 0 градусов, плечо стабилизации равно 0 мм, и радиус плеча обкатки колеса является значением положительного плеча обкатки колеса, большим или равным 0 мм. Кроме того, поперечный наклон поворотного шкворня задается в таком диапазоне (например, меньшем или равном 15 градусов), что поперечный наклон поворотного шкворня становится небольшим в рамках диапазона, допускающего становление радиуса плеча обкатки колеса положительным.
При такой заданной геометрии подвески система подвески позволяет задавать меньшим след или траекторию центра поверхности контакта шины и земли во время операции выполнения руления и уменьшать крутильный крутящий момент шины.
[0051] Следовательно, система подвески может уменьшать осевую силу зубчатой рейки, как следствие, уменьшать момент вокруг оси поворотного шкворня и уменьшать вывод актуатора 8 рулевого управления. Кроме того, система подвески может управлять направлением колеса за счет меньшей силы и, вследствие этого, улучшать стабильность и управляемость.
[0052] В системе 1B подвески согласно этому варианту осуществления два элемента нижних тяг размещаются в пересекающемся состоянии с пересечением друг друга. В этой конструкции, проще располагать воображаемую нижнюю точку поворота на внутренней стороне центра поверхности контакта шины и земли.
Следовательно, проще задавать поперечный наклон поворотного шкворня равным значению, более близкому к 0 градусов, и увеличивать радиус плеча обкатки колеса на стороне положительного плеча обкатки колеса.
[0053] Кроме того, несмотря на возможность влияния на способность к прямолинейному движению с точки зрения конструкции подвески, посредством задания угла продольного наклона поворотного шкворня равным 0 градусов и плеча стабилизации равным 0 мм, задание положительного плеча обкатки колеса уменьшает это влияние. Кроме того, система подвески обеспечивает способность к прямолинейному движению посредством добавления управления с помощью актуатора 8 рулевого управления. Таким образом, система подвески может улучшать стабильность и управляемость.
[0054] Кроме того, что касается ограничения поперечного наклона поворотного шкворня предварительно определенным диапазоном, за счет операции выполнения руления актуатора 8 рулевого управления можно не допускать возникновения ощущения тяжести у водителя. Что касается отдачи посредством внешней силы от поверхности дороги, система подвески может справляться с внешней силой с помощью актуатора 8 рулевого управления и тем самым не допускать влияния на водителя. Таким образом, система подвески может улучшать стабильность и управляемость.
[0055] Как упомянуто выше, система 1B подвески согласно этому варианту осуществления позволяет задавать воображаемую нижнюю точку поворота к внутренней стороне в направлении ширины транспортного средства вследствие пересекающейся компоновки элементов нижних тяг, пересекающих друг друга при виде сверху транспортного средства. Кроме того, ось поворотного шкворня, заданная посредством этой воображаемой нижней точки поворота, задается таким образом, что поперечный наклон поворотного шкворня является небольшим, ось поворотного шкворня проходит через поверхность или пятно контакта шины и земли в состоянии рулевого колеса SW в нейтральной позиции, и плечо стабилизации формируется внутри поверхности или пятна контакта шины и земли. Следовательно, система подвески может снижать момент вокруг оси поворотного шкворня.
[0056] Следовательно, система рулевого управления может выполнять руление колесами за счет меньшей осевой силы зубчатой рейки и управлять направлениями колес за счет меньшей силы, так что можно улучшать стабильность и управляемость.
В результате снижения момента вокруг оси поворотного шкворня, система подвески может уменьшать нагрузку, прикладываемую на валу 14 зубчатой рейки и поперечной рулевой тяге(ах) 15, так что можно упрощать составные части.
Кроме того, можно использовать актуатор с меньшей производительностью по приведению в действие в качестве актуатора 8 рулевого управления, реализующего систему SBW рулевого управления по проводам, и тем самым уменьшать стоимость и вес транспортного средства.
[0057] Например, по сравнению с традиционной системой подвески на основе рулевого управления по проводам, конструкция согласно настоящему изобретению позволяет уменьшать вес приблизительно на 10% и уменьшать стоимость приблизительно на 50%, главным образом, посредством упрощения элементов нижних тяг и уменьшения размера актуатора 8 рулевого управления.
Кроме того, система подвески использует конструкцию с возможностью увеличивать плечо стабилизации во время операции выполнения руления. Следовательно, система подвески может ограничивать увеличение угла поворота при выполнении руления при операции движения на повороте, формирующей высокое поперечное ускорение или боковое ускорение.
[0058] Кроме того, поскольку воображаемая нижняя точка поворота перемещается к внутренней стороне посредством действия боковой силы, действующей на колесо во время операции выполнения руления, радиус плеча обкатки колеса увеличивается, и способность к прямолинейному движению посредством стабилизирующего крутящего момента (SAT) может быть повышена.
При пересекающейся компоновке элементов нижних тяг точка соединения элемента нижней тяги может быть размещена около центра колеса, так что можно уменьшать вес стакана 33 полуоси.
[0059] Фиг. 12 является видом, схематично показывающим взаимосвязь между поперечным наклоном (углом поперечного наклона) поворотного шкворня и радиусом плеча обкатки колеса в этом варианте осуществления. Фиг. 12 показывает, в дополнение к вышеуказанной компоновке работающего на сжатие типа согласно этому варианту осуществления, компоновку работающего на растяжение типа согласно этому варианту осуществления, и дополнительно показывает, в качестве сравнительных примеров, непересекающиеся компоновки работающего на растяжение типа и работающего на сжатие типа для непересекающихся элементов нижних тяг (см. пример 1 варианта применения), и компоновку с одним поворотным элементом.
[0060] Как показано на фиг. 12, в практических примерах работающего на сжатие типа и работающего на растяжение типа согласно этому варианту осуществления, можно задавать поперечный наклон поворотного шкворня равным углу, более близкому к 0 градусов, и задавать радиус плеча обкатки колеса равным большему значению на стороне положительного плеча обкатки колеса, по сравнению с примером с одним поворотным элементом и сравнительными примерами с двумя поворотными элементами и без пересечения для непересекающихся элементов нижних тяг.
[0061] В частности, в практическом примере для работающего на сжатие типа согласно этому варианту осуществления, можно получать большие преимущества касательно эффекта снижения поперечного наклона поворотного шкворня до нуля градусов и эффекта увеличения радиуса плеча обкатки колеса на стороне положительного плеча обкатки колеса.
Система 1B подвески согласно этому варианту осуществления является применимой к системе подвески других типов, отличных от стоечного типа.
[0062] Фиг. 13 является видом, показывающим пример конструкции, в котором этот вариант осуществления применяется к системе подвески, имеющей поворотный кулак.
В примере, показанном на фиг. 13, верхний конец поворотного кулака KN соединяется с элементом UA верхнего рычага, и вторая тяга 38 (работающий на сжатие стержень) проходит над первой тягой 37 (работающий на растяжение стержень) и тем самым формирует пересекающуюся компоновку первой и второй тяг, пересекающих друг друга при виде сверху транспортного средства. Верхний конец поворотного кулака KN служит в качестве воображаемой верхней точки поворота, а точка пересечения между первой тягой 37 и второй 38 служит в качестве воображаемой нижней точки поворота.
[0063] При этой конструкции, аналогично стоечному типу, воображаемая нижняя точка поворота может задаваться ближе к внутренней стороне по направлению к продольной центровой линии транспортного средства в направлении ширины транспортного средства. При задании оси поворотного шкворня, заданной посредством этой воображаемой нижней точки поворота, так что она проходит через поверхность контакта шины и земли в нейтральной позиции рулевого колеса и плечо стабилизации, расположенное внутри поверхности контакта шины и земли, можно снижать момент вокруг оси поворотного шкворня.
[0064] Фиг. 14-16 являются видами, показывающими пример конструкции, в котором этот вариант осуществления применяется к системе задней подвески на двойных поперечных рычагах. Фиг. 14 является видом сбоку, фиг. 15 является видом спереди, и фиг. 16 является видом снизу.
В примере, показанном на фиг. 14-16, стойка 42 ступицы, поддерживающая колесо 41, поддерживается посредством верхней тяги 43, нижней тяги 44 и поперечной тяги 45, и система подвески имеет конструкцию с пятью тягами.
Верхняя тяга 43 имеет конструкцию в форме A-образного рычага, окружающего стойку ST и включающего в себя участок 43 вершины, соединенный с возможностью вращения с верхним концевым участком стойки 42 ступицы, и два концевых участка 43b и 43c, соединенных с возможностью вращения с элементом кузова транспортного средства (не показан).
[0065] Нижняя тяга 44, как лучше всего показано на фиг. 16, имеет пересекающуюся компоновку тяг из второй тяги 47 (работающего на сжатие стержня), проходящей над первой тягой 46 (работающий на растяжение стержень) в позиции около стойки 42 ступицы, так что первая и вторая тяги пересекают друг друга в виде снизу транспортного средства. В этой конструкции точка соединения верхней тяги 43 на верхнем концевом участке стойки 42 ступицы служит в качестве воображаемой верхней точки поворота, а точка пересечения между первой и второй тягами 46 и 47 служит в качестве воображаемой нижней точки поворота.
Кроме того, стойка ST соединяется с возможностью вращения с выступающим участком 42a, который формируется в верхнем конце стойки 42 ступицы и который выступает к внутренней стороне.
[0066] При этой конструкции, аналогично стоечному типу, воображаемая нижняя точка поворота может задаваться ближе к внутренней стороне по направлению к продольной центровой линии транспортного средства в направлении ширины транспортного средства, как показано на фиг. 15. При задании оси поворотного шкворня, заданной посредством этой воображаемой нижней точки поворота, так что она проходит через поверхность контакта шины и земли в нейтральной позиции рулевого колеса и плечо стабилизации, расположенное внутри поверхности контакта шины и земли, можно снижать момент вокруг оси поворотного шкворня.
[0067] В этом варианте осуществления, колеса 17FR, 17FL, 17RR и/или 17RL соответствуют колесу для шины, шине и механизму ступицы колеса, первая тяга 37 соответствует первому элементу тяги, а вторая тяга 38 соответствует второму элементу тяги. Вал 14 зубчатой рейки соответствует рулевой зубчатой рейке.
[0068] Конкретный пример(ы) конструкции схемы управления/приведения в действие
Фиг. 17-20 являются видами для иллюстрации конкретного примера конструкции устройства 26 управления/приведения в действие.
Как показано на фиг. 17, устройство 26 управления/приведения в действие включает в себя устройство 50 управления выполнением руления, которое включает в себя секцию 51 вычисления целевого угла поворота при выполнении руления, секцию 52 управления углом поворота при выполнении руления, секцию 53 дополнения способности к прямолинейному движению, секцию 54 компенсации возмущений, секцию 56 управления задержкой, секцию 58 вычисления отклонения угла поворота при выполнении руления, секцию 59 управления электромотором рулевого управления, секцию 60 вычисления отклонения тока и секцию 62 управления током электромотора.
Секция 51 вычисления целевого угла поворота при выполнении руления принимает скорость V транспортного средства и угол θs поворота при выполнении руления, считываемый посредством датчика 4 угла поворота при выполнении руления, в качестве вводов и вычисляет целевой угол δ* поворота при выполнении руления на основе этих вводов.
[0069] Секция 52 управления углом поворота при выполнении руления вычисляет варьирования Δfl и Δfr угла поворота при выполнении руления управляемыми колесами 17FL и 17FR вследствие подруливания за счет податливости. Эти варьирования Δfl и Δfr угла поворота при выполнении руления управляемыми колесами 17FL и 17FR вычисляются, посредством вычисления следующих уравнений (1) и (2), из движущей силы TL левых колес и движущей силы TR правых колес, выведенных из устройства 71 управления движущей силой, чтобы управлять распределением движущих сил левого и правого ведущих управляемых колес 17FL и 17FR и коэффициентом af подруливания за счет податливости, соответствующим прогибу втулок нижних тяг 37 и 38. Затем, секция 52 управления углом поворота при выполнении руления вычисляет величину или значение Ac управления подруливанием за счет податливости (=Δfl-Δfr) посредством вычисления разности варьирования между вычисленными варьированиями Δfl и Δfr.
Δfl=af·TL (1)
Δfr=af·TR (2)
[0070] Секция 53 дополнения способности к прямолинейному движению принимает движущие силы TL и TR колес для левых и правых колес, выведенные из устройства 71 управления движущей силой, для управления распределением движущей силы колес и крутящим моментом Ts поворота при выполнении руления, считываемым посредством датчика 5 крутящего момента поворота при выполнении руления, в качестве вводов. Из этих вводов секция 53 дополнения способности к прямолинейному движению вычисляет стабилизирующий крутящий момент Tsa и вычисляет величину или значение Asa управления стабилизирующим крутящим моментом (=Ksa·Tsa) в качестве величины или значения обеспечения способности к прямолинейному движению посредством умножения вычисленного стабилизирующего крутящего момента Tsa на предварительно определенное корректирующее усиление Ksa угла поворота при выполнении руления.
[0071] При вычислении стабилизирующего крутящего момента Tsam секция 53 дополнения способности к прямолинейному движению сначала вычисляет разность ΔT движущих сил (=TL-TR) между движущими силами TL и TR левых и правых колес и оценивает сформированный крутящий момент Th, сформированный посредством явления паразитного подруливания за счет крутящего момента во время операции выполнения руления, посредством поиска в карте управления для оценки сформированного крутящего момента, показанной на фиг. 18, из вычисленной разности ΔT движущих сил.
[0072] Карта управления для оценки сформированного крутящего момента задается для транспортного средства с положительным плечом обкатки колеса, имеющего радиус плеча обкатки колеса, заданный положительным. Как показано на фиг. 18, разность ΔT движущих сил представляется вдоль горизонтальной оси, а сформированный крутящий момент Th представляется вдоль вертикальной оси, и характеристика карты задается таким образом, что сформированный крутящий момент Th увеличивается от нуля в таком направлении, чтобы поворачивать транспортное средство вправо (в положительном направлении), пропорционально разности ΔT движущих сил, когда разность движущих сил ΔT увеличивается от нуля к положительной стороне, т.е. когда движущая сила TL левых колес увеличивается больше движущей силы TR правых колес.
[0073] С другой стороны, когда разность ΔT движущих сил увеличивается от нуля к отрицательной стороне, т.е. когда движущая сила TR правых колес увеличивается больше движущей силы TL левых колес, сформированный крутящий момент Th увеличивается от нуля в таком направлении, чтобы поворачивать транспортное средство влево (в отрицательном направлении), пропорционально разности ΔT движущих сил.
Затем, секция 53 дополнения способности к прямолинейному движению вычисляет стабилизирующий крутящий момент Tsa посредством вычитания сформированного крутящего момента Th из крутящего момента Ts поворота при выполнении руления, считываемого посредством датчика 5 крутящего момента поворота при выполнении руления.
[0074] Вычисление стабилизирующего крутящего момента Tsa не ограничивается вышеуказанным вычислением на основе разности ΔT левой и правой движущей силы. Стабилизирующий крутящий момент Tsa идентично может быть вычислен на основе разности левой и правой тормозной силы.
Кроме того, стабилизирующий крутящий момент Tsa может быть вычислен посредством предоставления датчика скорости относительно вертикальной оси для считывания скорости γ относительно вертикальной оси транспортного средства и датчика поперечного ускорения для считывания поперечного ускорения Gy транспортного средства, вычисления боковой силы Fy из производной скорости относительно вертикальной оси и поперечного ускорения Gy согласно уравнению движения транспортного средства и умножения боковой силы Fy посредством увода εn пневматической шины.
[0075] Кроме того, можно вычислять стабилизирующий крутящий момент Tsa из угла θs поворота при выполнении руления, считываемого посредством датчика 4 угла поворота при выполнении руления, и скорости V транспортного средства посредством поиска в карте управления, вычисленной посредством измерения или моделирования, для представления взаимосвязи между углом θs поворота при выполнении руления рулевого колеса 2 и стабилизирующим крутящим моментом Tsa со скоростью V транспортного средства в качестве параметра.
Секция 54 компенсации возмущений принимает крутящий момент Ts поворота при выполнении руления из датчика 5 крутящего момента поворота при выполнении руления, угол θmo поворота из датчика 9 угла поворота актуатора рулевого управления, ток imr электромотора из секции 61 считывания тока электромотора; оценивает возмущения, введенные в транспортное средство для каждой из полос частот; и вычисляет величину или значение Adis компенсации возмущений для ограничения возмущений.
[0076] Секция 54 компенсации возмущений включает в себя множество секций оценки возмущений, каждая из которых использует модель с использованием крутящего момента Ts поворота при выполнении руления, который представляет собой ввод руления, введенный водителем, и ввод руления, введенный посредством актуатора 8 рулевого управления, в качестве вводов управляющего сигнала и величину для фактического состояния руления в качестве величины управления, и оценивает возмущения на основе разности между величиной или значением, полученной посредством принудительного пропускания вводов управляющего сигнала через фильтр или фильтры нижних частот, и величиной или значением, полученным посредством принудительного пропускания величины управления через обратную характеристику и вышеуказанный фильтр нижних частот, как раскрыто в JP 2007-237840A. Каждая из секций оценки возмущений отделяет возмущения в каждой из полос частот посредством использования различных частот отсечки фильтров нижних частот.
[0077] Величина Adis компенсации возмущений, вычисленная посредством секции вычисления возмущений 54, и величина Asa управления стабилизирующим крутящим моментом, вычисленная посредством секции 53 дополнения способности к прямолинейному движению, суммируются в сумматоре 55a. Сумматор 55b вычисляет величину δa управления обеспечением способности к прямолинейному движению посредством суммирования выходного сигнала суммирования этого сумматора 55a и величины Ac управления подруливанием за счет податливости, вычисленной посредством секции 52 управления углом поворота при выполнении руления, и подает величину δa управления обеспечением способности к прямолинейному движению в секцию 56 управления задержкой.
[0078] Как показано на фиг. 17, секция 52 управления углом поворота при выполнении руления, секция 53 дополнения способности к прямолинейному движению, секция 54 компенсации возмущений и сумматоры 55a и 55b формируют секцию SG обеспечения или гарантирования способности к прямолинейному движению. Секция SG обеспечения способности к прямолинейному движению и секция 56 управления задержкой формируют секцию SRS задания отклика при выполнении руления.
Как показано на фиг. 17, секция 56 управления задержкой включает в себя секцию 56a определения начала руления, моностабильную схему 56b, секцию 56c регулировки усиления и умножитель 56d.
[0079] Секция 56a определения начала руления определяет время выполнения операции руления вправо или влево из нейтрального состояния с сохранением нейтральной позиции, посредством использования угла θs поворота при выполнении руления, считываемого посредством датчика 4 угла поворота при выполнении руления, и доставляет сигнал SS начала руления, представляющий начало операции руления из нейтрального состояния, в моностабильную схему 56b.
Моностабильная схема 56b формирует сигнал задержки начала управления, поддерживаемый в активированном состоянии в течение предварительно определенного времени задержки, например, в 0,1 секунды, на основе сигнала начала руления, выведенного из секции 56a определения начала руления, и доставляет сигнал задержки начала управления в секцию 56c регулировки усиления.
[0080] Секция 56c регулировки усиления поддерживает усиление Ga контура управления равным "0", в то время как сигнал задержки начала управления находится в активированном состоянии, задает усиление Ga контура управления равным "1", в то время как сигнал задержки начала управления находится в деактивированном состоянии, и доставляет такое определенное усиление Ga контура управления в умножитель 56d.
Умножитель 56d принимает величину δa управления обеспечением способности к прямолинейному движению, выведенную из секции SG обеспечения способности к прямолинейному движению, умножает величину δa управления обеспечением способности к прямолинейному движению на усиление Ga контура управления и подает результат умножения в сумматор 56e, в который вводится целевой угол δ* поворота при выполнении руления из секции 51 вычисления целевого угла поворота при выполнении руления.
[0081] Следовательно, секция 56 управления задержкой задает усиление Ga контура управления, используемое для умножения на величину δa управления обеспечением способности к прямолинейному движению, равным "0", чтобы прекращать управление обеспечением способности к прямолинейному движению для суммирования величины δa управления обеспечением способности к прямолинейному движению, вычисленной посредством секции SG обеспечения способности к прямолинейному движению, с целевым углом δ* поворота при выполнении руления в течение предварительно определенного времени, например, в 0,1 секунды, после определения начала операции руления вправо или влево из нейтрального состояния в секции 56a определения начала руления. Когда выходной сигнал моностабильной схемы 56b переключается на деактивированное состояние по истечению 0,1 секунды, секция 56c регулировки усиления задает усиление Ga контура управления равным "1", чтобы начинать управление обеспечением способности к прямолинейному движению для суммирования величины δa управления обеспечением способности к прямолинейному движению с целевым углом δ* поворота при выполнении руления.
[0082] Пока операция руления рулевым колесом 2 продолжается, секция 56a определения начала руления не определяет начало руления из нейтрального состояния, как следствие, моностабильная схема 56b поддерживает свой вывод в деактивированном состоянии, и секция 56c регулировки усиления задает усиление Ga контура управления равным "1". Следовательно, величина δa управления обеспечением способности к прямолинейному движению, вычисленная посредством секции SG обеспечения способности к прямолинейному движению, подается напрямую в сумматор 56e. Как результат, произведение Ga∙δa величины δa управления обеспечением способности к прямолинейному движению и усиления Ga контура управления суммируется с целевым углом δ* поворота при выполнении руления, и выполняется управление обеспечением способности к прямолинейному движению.
[0083] Секция 58 вычисления отклонения угла поворота при выполнении руления вычисляет отклонение Δδ угла поворота при выполнении руления посредством вычитания фактического угла δr поворота при выполнении руления, выведенного из датчика 9 угла поворота актуатора для актуатора 8a рулевого управления, формирующего актуатор 8, из целевого угла δ*a поворота при выполнении руления после суммирования, полученного посредством суммирования величины δa управления обеспечением способности к прямолинейному движению с целевым углом δ* поворота при выполнении руления, выведенным из сумматора 56e, и доставляет вычисленное отклонение Δδ угла поворота при выполнении руления в секцию 59 управления электромотором рулевого управления.
Секция 59 управления электромотором рулевого управления вычисляет целевой ток im* возбуждения электромотора 8a рулевого управления, формирующего актуатор 8 с тем, чтобы уменьшать введенное отклонение Δδ углов до нуля, и доставляет вычисленный целевой ток im* возбуждения в секцию 60 вычисления отклонения тока.
[0084] Секция 60 вычисления отклонения тока вычисляет отклонение Δi тока посредством вычитания фактического тока imr возбуждения электромотора, выводимого из секции 61 считывания тока электромотора, считывающей ток электромотора, подаваемый в электромотор 8a рулевого управления, формирующий актуатор 8, из введенного целевого тока im* возбуждения, и доставляет вычисленное отклонение тока δi в секцию 62 управления током электромотора.
Секция 62 управления током электромотора выполняет управление с обратной связью так, что введенное отклонение тока δi уменьшается до нуля, а именно, фактический ток imr возбуждения электромотора принудительно соответствует целевому току im* возбуждения, и подает фактический ток imr возбуждения электромотора в электромотор 8a рулевого управления.
[0085] Секция 58 вычисления отклонения угла поворота при выполнении руления, секция 59 управления электромотором рулевого управления, секция 60 вычисления отклонения тока, секция 61 считывания тока электромотора и секция 62 управления током электромотора формируют секцию 63 управления актуатором. Эта секция или устройство 63 управления актуатором осуществляет управление, чтобы задавать угол δr поворота, считываемый посредством секции 9 считывания угла поворота актуатора рулевого управления, считывающей угол поворота электромотора 8a рулевого управления, формирующего актуатор 8 рулевого управления, равным целевому углу δ* поворота при выполнении руления. Следовательно, секция 63 управления актуатором управляет углом δr поворота, чтобы задавать угол δr поворота равным целевому углу δ* поворота при выполнении руления, когда транспортное средство находится в состоянии прямого движения, и целевой угол δ* поворота при выполнении руления становится равным "0". Следовательно, вышеуказанная секция SG обеспечения способности к прямолинейному движению служит в качестве основной секции обеспечения способности к прямолинейному движению, а секция 63 управления актуатором служит в качестве вторичной секции обеспечения способности к прямолинейному движению.
[0086] Работа устройства управления выполнением руления
Далее приводится пояснение в отношении работы устройства управления выполнением руления согласно первому варианту осуществления со ссылкой на фиг. 19 и 20.
В состоянии движения по прямой, в котором рулевое колесо 2 удерживается в нейтральной позиции, и транспортное средство едет по прямой, целевой угол поворота при выполнении руления, вычисленный в секции 51 вычисления целевого угла δ* поворота при выполнении руления, равен нулю. Поскольку рулевое колесо 2 удерживается в нейтральной позиции, движущие силы или тормозные силы равны между левым и правым управляемыми ведущими колесами 17FL и 17 FR. Следовательно, варьирования Δfl и Δfr угла поворота при выполнении руления вследствие подруливания за счет податливости управляемых колес 17FL и 17FR, вычисленные в секции 52 управления углом поворота при выполнении руления согласно уравнениям (1) и (2), равны друг другу. Как результат, величина Ac коррекции подруливания за счет податливости становится равной нулю, поскольку величина Ac коррекции подруливания за счет податливости является разностью, полученной посредством вычитания варьирования Δfr из варьирования Δfl.
[0087] Аналогично, поскольку движущие силы TL и TR равны друг другу, и, следовательно, разность ΔT движущих сил равна нулю, сформированный крутящий момент Th, вычисленный в секции 53 дополнения способности к прямолинейному движению посредством использования карты управления оценки сформированного крутящего момента, показанной на фиг. 18, становится равным нулю. Кроме того, крутящий момент Ts поворота при выполнении руления равен нулю, стабилизирующий крутящий момент Tsa, равен нулю, и величина Asa управления стабилизирующим крутящим моментом равна нулю, поскольку рулевое колесо 2 не поворачивается в состоянии движения по прямой.
[0088] С другой стороны, секция 54 компенсации возмущений вычисляет величину Adis компенсации возмущений для подавления возмущений. Следовательно, величина δa управления обеспечением способности к прямолинейному движению определяется только посредством величины Adis компенсации возмущений. Такая определенная величина δa управления обеспечением способности к прямолинейному движению подается в умножитель 56d секции 56 управления задержкой.
В этой секции 56 управления задержкой вывод моностабильной схемы 56b остается в деактивированном состоянии, поскольку начало руления не определяется посредством секции 56a определения начала руления. Следовательно, усиление Ga контура управления задается равным "1" посредством секции 56c регулировки усиления, и это усиление Ga контура управления подается в умножитель 56d. Из этого умножителя величина δa управления обеспечением способности к прямолинейному движению подается напрямую без модификации в сумматор 56e и суммируется с целевым углом δ* поворота при выполнении руления, который равен нулю. Следовательно, целевой угол δ*a поворота при выполнении руления после суммирования определяется посредством величины Adis компенсации возмущений, и угол поворота при выполнении руления электромотора 8a рулевого управления управляется таким образом, что угол поворота при выполнении руления задается равным целевому углу δ*a поворота при выполнении руления после суммирования. Следовательно, транспортное средство может ехать по прямой вперед с исключенным влиянием возмущений.
[0089] Когда осуществляется руление передними колесами 17FL и 17FR посредством возмущений, вводимых от поверхности дороги посредством выступа на дороге или разности в коэффициенте трения с поверхностью дороги между передними колесами 17FL и 17FR, актуатор 8 рулевого управления вращается. В соответствии с этим приведением в действие актуатора 8 рулевого управления, варьируется угол θmo поворота, считываемый посредством датчика 9 угла поворота актуатора рулевого управления, и величина Adis компенсации возмущений варьируется в соответствии с варьированием этого угла θmo поворота.
[0090] Система управления управляет актуатором 8 рулевого управления в соответствии с величиной Adis компенсации возмущений и тем самым формирует крутящий момент, действующий против операции выполнения руления системы 1B рулевого управления, вызываемой посредством ввода от дороги. Таким образом, с помощью секции SG обеспечения способности к прямолинейному движению, система управления может обеспечивать способность к прямолинейному движению системы 1B подвески.
Когда возмущения не определяются посредством секции 54 компенсации возмущений в состоянии движения транспортного средства по прямой, величина δa управления обеспечением способности к прямолинейному движению, вычисленная в секции SG обеспечения способности к прямолинейному движению, равна нулю, и целевой угол δ* поворота при выполнении руления, выведенный из секции 51 вычисления целевого угла поворота при выполнении руления, также равен нулю. Следовательно, целевой угол δ*a поворота при выполнении руления после суммирования, выведенный из сумматора 56e, также равен нулю.
[0091] Следовательно, когда смещение угла поворота при выполнении руления формируется в электромоторе 8a рулевого управления, составляющем актуатор 8 рулевого управления, устройство 63 управления актуатором формирует ток imr электромотора с тем, чтобы подавлять это смещение угла поворота при выполнении руления, и тем самым возвращает управляемые колеса 17FL и 17FR к углу поворота при выполнении руления в состоянии движения по прямой. Таким образом, устройство 63 управления актуатором может обеспечивать способность к прямолинейному движению или рабочие характеристики движения по прямой.
[0092] Когда рулевое колесо 2 поворачивается вправо (или влево) из нейтральной позиции в состоянии движения по прямой, секция 56a определения начала руления определяет переход из состояния движения по прямой в состояние поворачивания, вызываемое посредством операции руления.
Следовательно, моностабильная схема 56b выводит сигнал задержки на управление, поддерживаемый в активированном состоянии, в течение предварительно определенного времени, например, в 0,1 секунды, в секцию 56c регулировки усиления. Соответственно, секция 56c регулировки усиления задает усиление Ga контура управления равным "0", в то время как сигнал задержки на управление остается в активированном состоянии. Следовательно, вывод произведения из умножителя 56d задается равным "0", и вывод величины δa управления обеспечением способности к прямолинейному движению в сумматор 56e прекращается.
[0093] Следовательно, в течение начального или первоначального периода T1 отклика в 0,1 секунды от начала операции руления рулевым колесом 2 из нейтральной позиции, усиление Ga контура управления поддерживается равным "0", как следствие, вывод произведения из умножителя 56d поддерживается равным "0", и управление обеспечением способности к прямолинейному движению для целевого угла δ* поворота при выполнении руления прекращается, как показано посредством сплошной линии на фиг. 20(b).
Соответственно, угол θs поворота при выполнении руления, считываемый посредством датчика 4 угла поворота при выполнении руления, подается в секцию 51 вычисления целевого угла поворота при выполнении руления, и целевой угол δ* поворота при выполнении руления, вычисленный в секции 51 вычисления целевого угла поворота при выполнении руления, подается напрямую без модификации в секцию 58 вычисления отклонения угла поворота при выполнении руления. Следовательно, электромотор 8a рулевого управления управляется так, что угол поворота при выполнении руления задается равным целевому углу δ* поворота при выполнении руления. В ходе этого прекращается управление обеспечением способности к прямолинейному движению в секции SG обеспечения способности к прямолинейному движению.
[0094] В начальном периоде T1 отклика, поэтому, операция выполнения руления начинается посредством системы подвески, в которой точка контакта с поверхностью дороги оси KS поворотного шкворня задается в позиции центра поверхности или пятна контакта шины и земли, и одновременно угол продольного наклона поворотного шкворня задается равным нулю.
В этом случае, угол продольного наклона поворотного шкворня системы 1B подвески задается равным нулю. Как показано на фиг. 19(a), показывающем взаимосвязь чувствительности или быстроты реакции при выполнении руления и стабильности руления относительно угла продольного наклона поворотного шкворня, в случае угла продольного наклона поворотного шкворня, равного нулю, чувствительность при выполнении руления является высокой, но стабильность руления является низкой или недостижимой. Иными словами, существует компромисс между чувствительностью при выполнении руления и стабильностью руления относительно угла продольного наклона поворотного шкворня.
[0095] Следовательно, на первоначальной или начальной стадии или в состоянии от начала операции руления из нейтральной позиции, управление обеспечением способности к прямолинейному движению посредством управления выполнением руления по проводам не выполняется, и эта начальная операция выполнения руления выполняется посредством системы 1B подвески.
В течение начального периода T1 отклика угол продольного наклона поворотного шкворня в системе 1B подвески равен нулю, как упомянуто выше, и чувствительность при выполнении руления является высокой. Характеристика отклика при выполнении руления (скорость относительно вертикальной оси) может быть задана более высокой, как показано посредством сплошной характеристической линии L1, показанной на фиг. 20(a), чем характеристика отклика при выполнении руления (скорость относительно вертикальной оси) транспортного средства, имеющего обычную систему подвески на основе рулевого управления по проводам, показанная посредством характеристической линии L2 в виде штрихпунктирной линии с одной точкой. В этом случае, угол поворота при выполнении руления варьируется в соответствии с углом поворота при выполнении руления рулевого колеса 2, варьируемым водителем, так что система подвески не приводит к возникновению неестественного ощущения у водителя.
[0096] Если операция выполнения руления продолжается за пределами начального периода T1 отклика только посредством чувствительности при выполнении руления системы 1B подвески, то чувствительность при выполнении руления транспортного средства становится высокой в среднем периоде T2 отклика и последнем периоде T3 отклика, как показано посредством характеристической линии L3 в виде пунктирной линии на фиг. 20(a). Кроме того, явление закручивания транспортного средства к внутренней стороне нарастает от среднего периода T2 отклика к последнему периоду T3 отклика.
[0097] Следовательно, как показано на фиг. 20(b), в конце начального периода T1 отклика, по истечению, например, 0,1 секунды управление обеспечением способности к прямолинейному движению для целевого угла δ* поворота при выполнении руления начинается способом ступенчатого изменения посредством секции SG обеспечения способности к прямолинейному движению, состоящей из секции 52 управления углом поворота при выполнении руления, секции 53 дополнения способности к прямолинейному движению и секции 54 компенсации возмущений. Следовательно, система управления выполнением руления ограничивает неустойчивость или колебание транспортного средства посредством ограничения чувствительности при выполнении руления транспортного средства посредством устройства 1B подвески; в то же время дополняет способность к прямолинейному движению устройства 1B подвески с помощью управления выполнением руления по проводам, как показано посредством пунктирной линии на фиг. 20(b); и тем самым обеспечивает стабильность руления.
[0098] Затем, в конце среднего периода T2 отклика, например, после истечения 0,3 секунды система управления может сдвигать характеристику руления в направлении тенденции недостаточного руления посредством ограничения характеристики отклика при выполнении руления в большей степени по сравнению с характеристикой отклика при выполнении руления обычного транспортного средства, с помощью управления обеспечением способности к прямолинейному движению посредством секции SG обеспечения способности к прямолинейному движению. За счет этого, система управления может улучшать стабильность руления, как показано посредством характеристической линии L1 в виде сплошной линии, показанной на фиг. 20(a), и реализовывать характеристику идеального отклика при выполнении руления транспортного средства, показанную посредством характеристической линии L1.
[0099] Как пояснено выше, в системе рулевого управления согласно этому варианту осуществления, можно снижать момент вокруг оси KS поворотного шкворня за счет компоновки первой тяги 37 и второй тяги 38, формирующих нижние тяги, выполненные с возможностью пересекать друг друга при виде сверху транспортного средства, если смотреть сверху, и задания оси KS поворотного шкворня так, что она проходит через поверхность или пятно контакта шины и земли в нейтральном состоянии, в котором рулевое колесо находится в нейтральной позиции, и плечо стабилизации, заданное внутри поверхности или пятна контакта шины и земли.
[0100] Следовательно, первый вариант осуществления позволяет выполнять руление колесами за счет меньшей осевой силы зубчатой рейки и управлять направлениями колес за счет меньшей силы. Таким образом, первый вариант осуществления может улучшать маневренность и стабильность.
Таким образом, в первом варианте осуществления, устройство 1B подвески по сути выполнено с возможностью повышать чувствительность при выполнении руления, по меньшей мере, с осью KS поворотного шкворня, заданной так, что она проходит через поверхность контакта шины и земли, и в дополнение к этой компоновке, секция SG обеспечения способности к прямолинейному движению системы SBW рулевого управления по проводам выполнена с возможностью обеспечивать способность к прямолинейному движению устройства 1B подвески посредством выполнения управления углом поворота при выполнении руления с тем, чтобы управлять характеристикой руления, дополнением способности к прямолинейному движению и компенсацией возмущений.
[0101] Следовательно, когда рулевое колесо 2 поворачивается вправо или влево из состояния рулевого колеса 2, удерживаемого в нейтральной позиции, система подвески обеспечивает высокую чувствительность посредством использования высокой чувствительности при выполнении руления устройства 1B подвески по сути в начальном периоде T1 отклика. После истечения начального периода T1 отклика, в среднем периоде T2 отклика, в котором существует потребность в задании веса для стабильности руления, а не чувствительности при выполнении руления, усиление Ga контура управления задается равным "1" посредством секции 56c регулировки усиления секции 56 управления задержкой системы SBW рулевого управления по проводам, и тем самым управление обеспечением способности к прямолинейному движению начинается с величины δa управления обеспечением способности к прямолинейному движению, вычисленной в секции SG обеспечения способности к прямолинейному движению.
[0102] Следовательно, посредством начала управления обеспечением способности к прямолинейному движению, такого как управление углом поворота при выполнении руления, дополнение способности к прямолинейному движению и компенсация возмущений, система управления подвески ограничивает высокую чувствительность при выполнении руления посредством устройства 1B подвески и обеспечивает стабильность руления. Кроме того, в последнем периоде T3 отклика, система рулевого управления может сдвигать характеристику руления в направлении тенденции недостаточного руления посредством дополнительного снижения чувствительности при выполнении руления с тем, чтобы ограничивать явление закручивания транспортного средства к внутренней стороне, и, вследствие этого, ограничивать колебание транспортного средства и предоставлять идеальное управление чувствительностью при выполнении руления.
[0103] Кроме того, секция 52 управления углом поворота при выполнении руления может быть предоставлена и выполнена с возможностью осуществлять управление обеспечением способности к прямолинейному движению с учетом смещения управляемых колес 17FL и 17FR вследствие подруливания за счет податливости. Следовательно, можно задавать жесткость втулки на слабом уровне для втулок, расположенных в боковых поддерживающих участках кузова 1A транспортного средства первой и второй нижних тяг 37 и 38, и улучшать комфорт во время езды посредством снижения степени передачи вибрации от поверхности дороги через первую и вторую тяги 37 и 38 на кузов 1A транспортного средства.
[0104] В первом варианте осуществления, пояснение направлено на пример, в котором устройство 50 управления выполнением руления реализуется посредством аппаратной конфигурации. Тем не менее, этот пример не является ограничивающим примером. Например, секция 51 вычисления целевого угла поворота при выполнении руления и секция SG обеспечения способности к прямолинейному движению могут формироваться посредством устройства обработки, такого как микрокомпьютер, и это устройство обработки, например, может быть выполнено с возможностью осуществлять процесс управления выполнением руления, как показано на фиг. 21.
[0105] В этом процессе управления выполнением руления, как показано на фиг. 21, во-первых, на этапе S1, устройство обработки считывает данные, требуемые для процесса вычисления, такие как скорость V транспортного средства, угол θs поворота при выполнении руления, считываемый посредством датчика 4 угла поворота при выполнении руления, угол θmo поворота, считываемый посредством датчика 9 угла поворота актуатора, движущие силы TL и TR левых и правых колес устройства 71 управления движущей силой и крутящий момент Ts поворота при выполнении руления, считываемый посредством датчика 5 крутящего момента поворота при выполнении руления. Затем, устройство обработки переходит к этапу S2 и анализирует то, поворачивается или нет рулевое колесо 2 из состояния поддержания нейтральной позиции влево или вправо, чтобы определять состояние начала руления, посредством анализа угла θs поворота при выполнении руления, считываемого посредством датчика 4 угла поворота при выполнении руления. От S2 устройство обработки переходит к этапу S3, когда состояние начала руления не определяется.
[0106] На этапе S3, устройство обработки анализирует то, задан или нет флаг F управления, представляющий состояние управления началом руления, равным "1". Когда флаг F управления сбрасывается до "0", устройство обработки переходит к этапу S4, задает усиление Ga контура управления равным "1" и затем переходит к этапу S5.
На этапе S5, устройство обработки вычисляет целевой угол δ* поворота при выполнении руления в соответствии со скоростью V транспортного средства и углом θs поворота при выполнении руления, идентично секции 51 вычисления целевого угла поворота при выполнении руления.
[0107] Затем, на этапе S6, аналогично секции 52 управления углом поворота при выполнении руления, устройство обработки вычисляет варьирования Δfl и Δfr угла поворота при выполнении руления управляемых колес 17FL и 17FR вследствие подруливания за счет податливости посредством умножения движущей силы TL левых колес и движущей силы TR правых колес на коэффициент af подруливания за счет податливости и вычисляет величину или значение Ac управления подруливанием за счет податливости из этих вычисленных варьирований.
[0108] Затем, на этапе S7, аналогично секции 53 дополнения способности к прямолинейному движению, на основе разности ΔT движущих сил (=TL-TR) между движущими силами TL и TR левых и правых колес устройство обработки оценивает сформированный крутящий момент Th, сформированный посредством явления паразитного подруливания за счет крутящего момента во время операции выполнения руления, посредством поиска в карте управления для оценки сформированного крутящего момента, показанной на фиг. 18. Затем, устройство обработки вычисляет стабилизирующий крутящий момент Tsa посредством вычитания сформированного крутящего момента Th из крутящего момента Ts поворота при выполнении руления и вычисляет величину или значение Asa управления стабилизирующим крутящим моментом посредством умножения вычисленного стабилизирующего крутящего момента Tsa на предварительно определенное усиление Ksa.
[0109] Затем, на этапе S8, устройство обработки отделяет и оценивает возмущения в полосах частот, введенные в транспортное средство, соответственно, и вычисляет величину Adis компенсации возмущений, чтобы ограничивать эти возмущения, в соответствии с углом поворота электромотора θmo из датчика 9 угла поворота актуатора рулевого управления, крутящим моментом Ts поворота при выполнении руления и током imr электромотора, считываемым посредством секции 61 считывания тока электромотора.
Затем, на этапе S9, устройство обработки вычисляет целевой угол δ*a поворота при выполнении руления после суммирования из целевого угла δ* поворота при выполнении руления, величины Ac управления подруливанием за счет податливости, величины Asa управления стабилизирующим крутящим моментом и величины Adis компенсации возмущений посредством вычисления следующего уравнения (3).
δ*a=δ*+Ga (Ac+Asa+Adis) (3)
[0110] Затем, на этапе S10, устройство обработки доставляет целевой угол δ*a поворота при выполнении руления после суммирования, вычисленный на этапе S9, в секцию 58 вычисления отклонения угла поворота при выполнении руления, показанную на фиг. 17. После этого, устройство обработки возвращается к этапу S1.
Когда заключение этапа S2 указывает определение состояния начала руления, устройство обработки переходит к этапу S11 и задает флаг F управления равным "1". От S11 устройство обработки переходит к этапу S12. Когда заключение этапа S3 состоит в том, что флаг F управления задается равным "1", то устройство обработки переходит непосредственно к этапу S12.
[0111] На этом этапе S12, устройство обработки анализирует то, истекло или нет предварительно определенное время задержки (например, в 0,1 секунды). Когда предварительно определенное время задержки еще не истекло, устройство обработки переходит к этапу S13 и задает усиление Ga контура управления равным "0". От S13 секция обработки переходит к этапу S5 и вычисляет целевой угол δ* поворота при выполнении руления.
Когда заключение этапа S12 указывает истечение предварительно определенного времени задержки (например, в 0,1 секунды), устройство обработки переходит к этапу S14 и сбрасывает флаг F управления до "0". От S14 устройство обработки переходит к этапу S4 и задает усиление Ga контура управления равным "1".
[0112] Кроме того, с помощью процесса вычисления команд управления углом поворота при выполнении руления, показанного на фиг. 21, система управления выполняет управление обеспечением способности к прямолинейному движению, чтобы суммировать, с целевым углом δ* поворота при выполнении руления, величину δa управления обеспечением способности к прямолинейному движению, полученную посредством суммирования величины Ac управления подруливанием за счет податливости, величины Asa управления стабилизирующим крутящим моментом и величины Adis компенсации возмущений, при отсутствии состояния начала руления в начале поворота рулевого колеса 2 влево или вправо из нейтральной позиции.
[0113] В случае состояния начала руления в начале поворота рулевого колеса 2 влево или вправо из нейтральной позиции, усиление Ga контура управления задается равным "0", и управление обеспечением способности к прямолинейному движению не выполняется до истечения предварительно определенного времени задержки. Следовательно, только целевой угол δ* поворота при выполнении руления выводится в секцию 58 вычисления отклонения угла поворота при выполнении руления, и электромотор 8a рулевого управления актуатора 8 рулевого управления приводится в действие в соответствии с целевым углом δ* поворота при выполнении руления. Следовательно, первоначальная или начальная чувствительность при выполнении руления, по сути, задается на уровне высокой чувствительности при выполнении руления устройства подвески, и система может предоставлять высокую чувствительность при выполнении руления.
[0114] После истечения времени задержки усиление Ga контура управления задается равным "1", и вращение электромотора 8a рулевого управления актуатора 8 рулевого управления управляется в соответствии с суммой, полученной посредством суммирования, с целевым углом δ* поворота при выполнении руления, величины δa управления обеспечением способности к прямолинейному движению, полученной посредством суммирования величины Ac управления подруливанием за счет податливости, величины Asa управления стабилизирующим крутящим моментом и величины Adis компенсации возмущений. Следовательно, высокая чувствительность отклика устройства 1B подвески ограничивается, способность к прямолинейному движению устройства 1B подвески обеспечивается, и характеристика отклика при выполнении руления задается в идеальной форме.
[0115] Кроме того, в случае этого процесса управления выполнением руления, в состоянии движения транспортного средства по прямой, целевой угол δ* поворота при выполнении руления равен нулю, и этот целевой угол δ* поворота при выполнении руления подается в секцию 58 вычисления отклонения угла поворота при выполнении руления по фиг. 16 напрямую в случае отсутствия возмущений. Следовательно, система управления может обеспечивать способность к прямолинейному движению с помощью устройства 63 управления актуатором таким же образом, как упомянуто выше.
В процессе по фиг. 21, этап S5 соответствует секции 51 вычисления целевого угла поворота при выполнении руления, этап S6 соответствует секции 52 управления углом поворота при выполнении руления, этап S7 соответствует секции 53 дополнения способности к прямолинейному движению, этапы S5-S7 соответствуют секции SG обеспечения способности к прямолинейному движению, этапы S2-S4 и S11-S14 соответствуют секции 56 управления задержкой, и этапы S2-S14 соответствуют секции SRS задания чувствительности при выполнении руления.
[0116] В первом варианте осуществления, проиллюстрированный пример использует секцию SG обеспечения способности к прямолинейному движению, сформированную посредством секции 52 управления углом поворота при выполнении руления, секции 53 дополнения способности к прямолинейному движению и секции 54 компенсации возмущений. Тем не менее, первый вариант осуществления не ограничивается этим примером. По своему усмотрению можно опускать любую одну или две из секции 52 управления углом поворота при выполнении руления, секции 53 дополнения способности к прямолинейному движению и секции 54 компенсации возмущений.
[0117] Преимущество первого варианта осуществления
(1) На нижней стороне от полуоси в направлении вверх и вниз транспортного средства или в вертикальном направлении, первый и второй элементы тяг, соединяющие механизм ступицы колеса и кузов транспортного средства, выполнены с возможностью пересекать друг друга при виде сверху транспортного средства.
Эта компоновка позволяет размещать воображаемую нижнюю точку поворота ближе к расположенной внутри стороне кузова транспортного средства в направлении ширины или в поперечном направлении транспортного средства и тем самым снижать момент вокруг оси поворотного шкворня.
Следовательно, эта компоновка предоставляет операцию выполнения руления за счет меньшей осевой силы зубчатой рейки, чтобы управлять направлением колес за счет меньшей силы и, вследствие этого, улучшать управляемость и стабильность транспортного средства.
[0118] (2) Точки соединения на внутренней стороне или стороне кузова транспортного средства первого и второго элементов тяг размещаются на расположенной сзади стороне или задней стороне от полуоси в направлении вперед и назад транспортного средства для продольного направления транспортного средства.
Эта компоновка позволяет реализовывать настоящее изобретение в форме устройства подвески работающего на сжатие типа.
(3) В вышеуказанном устройстве подвески работающего на сжатие типа рулевая зубчатая рейка размещается на расположенной спереди или передней стороне от полуоси в направлении вперед и назад транспортного средства.
Следовательно, колесо перемещается к внутренней стороне по отношению к повороту во время операции выполнения руления, и, как следствие, осевая сила рулевой зубчатой рейки может быть снижена.
[0119] (4) Устройство подвески транспортного средства выполнен с возможностью подвешивать или поддерживать управляемое колесо, руление которым осуществляется посредством системы рулевого управления по проводам.
Следовательно, посредством использования актуатора рулевого управления из системы рулевого управления по проводам, система управления может осуществлять управление в соответствии с заданием плеча стабилизации согласно этому варианту осуществления и, вследствие этого, улучшать управляемость и стабильность.
[0120] (5) Ось поворотного шкворня, имеющая нижнюю точку поворота в точке пересечения между первым и вторым элементами тяг при виде сверху транспортного средства, выполнена с возможностью проходить через поверхность или пятно контакта шины и земли в нейтральной позиции рулевого колеса.
Эта компоновка позволяет снижать момент вокруг оси поворотного шкворня, выполнять руление колесами за счет меньшей осевой силы зубчатой рейки и управлять направлениями колес за счет меньшей силы. Таким образом, эта компоновка может улучшать управляемость и стабильность.
[0121] (6) Элементы нижних тяг для соединения колеса и кузова транспортного средства выполнены с возможностью пересекать друг друга при виде сверху транспортного средства, и воображаемая нижняя точка поворота задается в точке пересечения между элементами тяг.
В этой компоновке, можно задавать воображаемую нижнюю точку поворота в позиции ближе к расположенной внутри стороне кузова транспортного средства в направлении ширины транспортного средства, и, следовательно, можно снижать момент вокруг оси поворотного шкворня.
(7) Устройство подвески транспортного средства согласно этому варианту осуществления применяется к механизму подвески стоечного типа.
Следовательно, можно сокращать число составных частей, составляющих подвеску, и упрощать задание оси поворотного шкворня согласно этому варианту осуществления.
[0122] (8) Способ регулирования геометрии устройства подвески транспортного средства является способом задания точки контакта с поверхностью дороги оси KS поворотного шкворня таким образом, что она находится в пределах поверхности или пятна контакта шины и земли в состоянии рулевого колеса в нейтральной позиции.
Это задание позволяет снижать момент вокруг оси KS поворотного шкворня, выполнять руление колесом за счет меньшей осевой силы зубчатой рейки и управлять направлением колеса за счет меньшей силы.
Следовательно, в этом варианте осуществления, можно снижать вес устройства подвески и одновременно улучшать управляемость и стабильность транспортного средства.
[0123] (9) Устройство подвески транспортного средства выполнен с возможностью подвешивать управляемое колесо, руление которым должно осуществляться посредством системы рулевого управления по проводам.
Следовательно, посредством использования актуатора рулевого управления из системы рулевого управления по проводам, система управления может осуществлять управление с дополнением способности к прямолинейному движению в соответствии с заданием оси поворотного шкворня и плеча стабилизации согласно этому варианту осуществления и, вследствие этого, улучшать стабильность и управляемость.
[0124] (10) Предусмотрены устройство управления выполнением руления для руления управляемым колесом с помощью актуатора в соответствии с состоянием руления рулевого колеса и устройство подвески для поддержки управляемого колеса на кузове транспортного средства. Устройство подвески включает в себя первый и второй элементы тяг, которые выполнены с возможностью соединять механизм ступицы колеса и кузов транспортного средства на нижней стороне от полуоси в направлении вверх и вниз транспортного средства и которые выполнены с возможностью пересекать друг друга при виде сверху или при виде в плане транспортного средства, если смотреть сверху. Кроме того, устройство управления выполнением руления включает в себя секцию обеспечения способности к прямолинейному движению, чтобы обеспечивать способность к прямолинейному движению устройства подвески.
[0125] Следовательно, эта система позволяет снижать момент вокруг оси поворотного шкворня, выполнять руление колесами за счет меньшей осевой силы зубчатой рейки и управлять направлениями колес за счет меньшей силы. Соответственно, система может улучшать характеристику отклика при выполнении руления. При задании угла продольного наклона поворотного шкворня около нуля устройство подвески может быть сконструировано с дополнительно улучшенной характеристикой отклика при выполнении руления. Кроме того, секция обеспечения способности к прямолинейному движению может справляться со снижением способности к прямолинейному движению вследствие достижения характеристики отклика при выполнении руления устройства подвески.
[0126] (11) Секция обеспечения способности к прямолинейному движению формирует систему рулевого управления по проводам, считывающую варьирование угла поворота при выполнении руления при операции поворота рулевого колеса и включающую в себя актуатор рулевого управления для того, чтобы выполнять руление управляемым колесом в соответствии с результатом (θs) считывания, и устройство управления актуатором, чтобы управлять актуатором рулевого управления.
Следовательно, нет необходимости в предоставлении секции обеспечения способности к прямолинейному движению независимо, так что конструкция может быть упрощена.
Кроме того, секция обеспечения способности к прямолинейному движению может быть сконструирована с возможностью включать в себя секцию SG обеспечения способности к прямолинейному движению секции SRS задания характеристики отклика при выполнении руления, в качестве основной секции обеспечения способности к прямолинейному движению, и устройство 63 управления актуатором, в качестве вторичной секции обеспечения способности к прямолинейному движению. При этой конструкции, можно надежно обеспечивать способность к прямолинейному движению устройства подвески.
[0127] (12) Посредством задержки управления обеспечением способности к прямолинейному движению секции обеспечения способности к прямолинейному движению с помощью секции управления задержкой, когда рулевое колесо поворачивается из состояния поддержания нейтральной позиции, система обеспечивает характеристику быстрого отклика при выполнении руления посредством использования чувствительности при выполнении руления устройства подвески по сути для начальной характеристики отклика. После этого, система регулирует чувствительность при выполнении руления устройства подвески посредством управления обеспечением способности к прямолинейному движению.
Следовательно, когда операция руления начинается из нейтральной позиции, система может предоставлять характеристику быстрого отклика при выполнении руления в качестве первоначальной или начальной характеристики отклика. После этого, система может предоставлять характеристику идеального отклика при выполнении руления посредством регулирования чувствительности при выполнении руления устройства подвески посредством управления обеспечением способности к прямолинейному движению секции обеспечения способности к прямолинейному движению.
[0128] (13) Секция обеспечения способности к прямолинейному движению обеспечивает способность к прямолинейному движению посредством вычисления стабилизирующего крутящего момента.
Следовательно, посредством использования стабилизирующего крутящего момента, секция обеспечения способности к прямолинейному движению может обеспечивать способность к прямолинейному движению, сниженную посредством поддержания высокой чувствительности устройства подвески, и улучшать стабильность и управляемость.
(14) Секция обеспечения способности к прямолинейному движению выполнена с возможностью оценивать, по меньшей мере, подруливание за счет податливости и корректировать смещение управляемого колеса.
Следовательно, система позволяет снижать жесткость втулки в поддерживающем участке на стороне кузова транспортного средства нижнего рычага устройства подвески и улучшает комфорт во время езды транспортного средства.
[0129] (15) Когда начинается операция руления с поворотом рулевого колеса из состояния поддержания нейтральной позиции, секция задания чувствительности при выполнении руления системы рулевого управления по проводам задает начальную чувствительность при выполнении руления равной характеристике отклика при выполнении руления устройства подвески, по сути, на начальной или первоначальной стадии операции руления, и секция обеспечения способности к прямолинейному движению системы рулевого управления по проводам по сути начинает обеспечение способности к прямолинейному движению управления устройства подвески, по существу, актуатором рулевого управления после истечения заданного начального периода времени.
Следовательно, система может обеспечивать высокую чувствительность при выполнении руления устройства подвески при начальном рулении и осуществляет управление обеспечением способности к прямолинейному движению устройства подвески актуатором рулевого управления с помощью секции обеспечения способности к прямолинейному движению после истечения заданного начального периода времени, так что можно получать идеальную чувствительность при выполнении руления.
[0130] (16) Когда операция руления с поворотом рулевого колеса начинается из нейтральной позиции, секция задания отклика при выполнении руления задает высокую чувствительность при выполнении руления для чувствительности при выполнении руления устройства подвески в начальном состоянии выполнения руления и задает требуемую чувствительность при выполнении руления посредством управления обеспечением способности к прямолинейному движению секции обеспечения способности к прямолинейному движению в состоянии выполнения руления после состояния начального выполнения руления.
Следовательно, посредством задания устройства подвески так, что он имеет высокую чувствительность при выполнении руления, и обеспечения способности к прямолинейному движению устройства подвески с помощью секции обеспечения способности к прямолинейному движению можно получать характеристику идеального отклика при выполнении руления.
[0131] (17) Секция задания отклика при выполнении руления включает в себя секцию управления задержкой, чтобы задерживать управление обеспечением способности к прямолинейному движению посредством секции обеспечения способности к прямолинейному движению, когда операция руления, чтобы поворачивать рулевое колесо, начинается из нейтральной позиции.
Следовательно, посредством задержки начала управления обеспечением способности к прямолинейному движению посредством секции обеспечения способности к прямолинейному движению с помощью секции управления задержкой, система, по сути, может задавать начальную чувствительность при выполнении руления как высокую чувствительность при выполнении руления устройства подвески.
[0132] (18) Секция управления задержкой включает в себя секцию регулировки усиления, чтобы регулировать начало управления обеспечением способности к прямолинейному движению посредством секции обеспечения способности к прямолинейному движению.
Секция регулировки усиления может задавать усиление для величины управления обеспечением способности к прямолинейному движению при управлении обеспечением способности к прямолинейному движению равным "0", чтобы исключать управление обеспечением способности к прямолинейному движению, и начинать управление обеспечением способности к прямолинейному движению посредством задания усиления равным значению, большему 0, например, "1". Следовательно, с помощью секции регулировки усиления, проще регулировать начало управления обеспечением способности к прямолинейному движению.
[0133] (19) Секция управления задержкой начинает управление обеспечением способности к прямолинейному движению секции обеспечения способности к прямолинейному движению после задержки в 0,1 секунды от времени начала выполнения руления с поворотом рулевого колеса вправо или влево из состояния поддержания нейтрального состояния.
Следовательно, система может эффективно использовать высокую чувствительность при выполнении руления устройства подвески в качестве начальной чувствительности при выполнении руления, начинать управление обеспечением способности к прямолинейному движению секции обеспечения способности к прямолинейному движению после истечения начального периода в 0,1 секунды и тем самым предоставлять удовлетворительную чувствительность при выполнении руления.
[0134] (20) Когда управление обеспечением способности к прямолинейному движению посредством секции обеспечения прямолинейности должно быть начато, секция управления задержкой начинает управление обеспечением способности к прямолинейному движению ступенчатым способом. Следовательно, система управления может регулировать чувствительность при выполнении руления посредством управления углом поворота при выполнении руления и дополнения способности к прямолинейному движению непосредственно во время начала управления.
(21) Когда управление обеспечением способности к прямолинейному движению посредством секции обеспечения прямолинейности должно быть начато, секция управления задержкой начинает управление обеспечением способности к прямолинейному движению постепенно. Следовательно, система управления может варьировать чувствительность при выполнении руления плавно во время начала управления и предотвращать возникновение неестественного ощущения, отличающегося от фактического ощущения при выполнении руления, у водителя.
[0135] (22) Устройство управления выполнением руления содержит: секцию вычисления целевого угла поворота при выполнении руления, чтобы вычислять целевой угол поворота при выполнении руления в соответствии с углом поворота при выполнении руления; сумматор, чтобы суммировать, с целевым углом поворота при выполнении руления, вычисленным посредством секции вычисления целевого угла поворота при выполнении руления, величину управления обеспечением способности к прямолинейному движению секции обеспечения способности к прямолинейному движению; секцию управления электромотором рулевого управления, чтобы формировать командный ток для электромотора, чтобы задавать угол поворота электромотора рулевого управления, формирующего актуатор рулевого управления, равным выходному сигналу суммирования сумматора; и секцию управления током, чтобы формировать ток возбуждения электромотора, который должен подаваться в электромотор рулевого управления, так что ток возбуждения электромотора становится равным командному току для электромотора.
[0136] Следовательно, секция вычисления целевого угла поворота при выполнении руления вычисляет целевой угол поворота при выполнении руления в соответствии с углом поворота при выполнении руления рулевого колеса; сумматор суммирует, с целевым углом поворота при выполнении руления, величину управления обеспечением способности к прямолинейному движению; секция управления электромотором рулевого управления формирует командный ток для электромотора, чтобы задавать угол поворота электромотора рулевого управления, формирующего актуатор, равным выходному сигналу суммирования сумматора; и секция управления током электромотора формирует ток возбуждения электромотора так, что он соответствует командному току для электромотора. Целевой угол поворота при выполнении руления, выведенный из секции вычисления целевого угла поворота при выполнении руления, регулируется посредством секции управления чувствительности при выполнении руления, так что может выполняться оптимальное управление выполнением руления.
[0137] (23) Когда рулевое колесо поворачивается из нейтральной позиции, высокая чувствительность при выполнении руления устройства подвески задается как начальная чувствительность при выполнении руления на начальной или первоначальной стадии руления, и чувствительность при выполнении руления устройства подвески регулируется до требуемой чувствительности при выполнении руления посредством управления обеспечением способности к прямолинейному движению секции обеспечения способности к прямолинейному движению после начальной стадии руления.
Следовательно, когда рулевое колесо поворачивается из нейтральной позиции, можно получать идеальную чувствительность при выполнении руления с помощью высокой чувствительности при выполнении руления устройства подвески и регулирования чувствительности при выполнении руления посредством управления обеспечением способности к прямолинейному движению секции обеспечения способности к прямолинейному движению.
[0138] Пример 1 варианта применения
Дополнительный конкретный пример конструкции устройства 1B подвески
В первом варианте осуществления, конкретная конструкция устройства 1B подвески поясняется посредством использования примера работающего на сжатие типа. Тем не менее, можно использовать следующую конструкцию.
Фиг. 22 является схематичным видом, показывающим пример конструкции устройства 1B подвески с помощью устройства подвески работающего на растяжение типа (типа, в котором точки соединения на стороне кузова транспортного средства элементов нижних тяг находятся на передней стороне от полуоси при виде сверху транспортного средства).
[0139] В примере, показанном на фиг. 22, при виде сверху транспортного средства, работающий на сжатие стержень (вторая тяга 38) протягивается вдоль полуоси на передней стороне от полуоси, а работающий на растяжение стержень (первая тяга 37) протягивается вперед от полуоси и соединяется с кузовом транспортного средства в позиции на передней стороне от полуоси. Следовательно, соединительные или монтажные позиции на внутренней стороне или на стороне кузова транспортного средства работающего на сжатие стержня (первой тяги 38) и работающей на растяжение тяги (первой тяги 37) находятся на передней стороне в продольном направлении транспортного средства или в направлении вперед и назад транспортного средства.
[0140] Как показано на фиг. 22, в компоновке с двумя поворотными элементами, в которой элементы нижних тяг выполнены с возможностью пересекать друг друга в системе подвески работающего на растяжение типа, элементы нижних тяг обеспечивают такую операцию выполнения руления, чтобы направлять колесо по мере поворота внешнего колеса по внешней стороне по отношению к движению при повороте транспортного средства, посредством вращения вперед к передней части транспортного средства вокруг поддерживающих точек на стороне кузова транспортного средства (состояние, показанное посредством пунктирных линий). В этом случае, воображаемая нижняя точка поворота размещается в точке пересечения между элементами нижних тяг. Эта система подвески позволяет задавать воображаемую нижнюю точку поворота в позиции на расположенной внутри стороне или внутренней стороне кузова транспортного средства по сравнению с непересекающейся компоновкой подвески, в которой элементы нижних тяг не пересекаются. Следовательно, эта компоновка подвески позволяет задавать начальный радиус плеча обкатки колеса большим в направлении положительного плеча обкатки колеса.
[0141] В системе подвески работающего на растяжение типа, показанной на фиг. 22, поскольку угол поворота работающего на растяжение стержня является большим при операции выполнения руления, воображаемая нижняя точка поворота сдвигается к внешней стороне. В этом случае, при виде сверху транспортного средства расстояние от центровой линии шины до воображаемой нижней точки поворота в направлении вперед и назад транспортного средства или в продольном направлении перемещается в направлении наружу от центровой линии шины, и, следовательно, радиус плеча обкатки колеса становится меньшим в рамках диапазона положительного плеча обкатки колеса. Следовательно, в системе подвески работающего на растяжение типа, когда применяется этот вариант осуществления, осевая сила зубчатой рейки увеличивается при операции выполнения руления по мере поворота внешнего колеса. Тем не менее, поскольку начальный радиус плеча обкатки колеса в состоянии отсутствия операции выполнения руления задается равным достаточно большому значению, осевая сила зубчатой рейки задается равной небольшому значению по сравнению с непересекающейся компоновкой подвески работающего на растяжение типа, в которой элементы нижних тяг не пересекаются.
[0142] В случае компоновки подвески работающего на растяжение типа, в которой элементы нижних тяг не пересекаются, поскольку угол поворота работающего на растяжение стержня является большим при операции выполнения руления, воображаемая нижняя точка поворота сдвигается к внутренней стороне. В этом случае, при виде сверху транспортного средства расстояние от центровой линии шины в направлении вперед и назад шины до воображаемой нижней точки поворота находится на внутренней стороне центровой линии шины, и, следовательно, радиус плеча обкатки колеса становится больше в направлении к отрицательному плечу обкатки колеса. Следовательно, осевая сила зубчатой рейки снижается при операции выполнения руления. Тем не менее, поскольку воображаемая нижняя точка поворота находится на удлинении каждой тяги, радиус плеча обкатки колеса в начальном состоянии без операции выполнения руления является небольшим, и непросто снижать в значительной степени осевую силу зубчатой рейки.
[0143] Кроме того, в примере, показанном на фиг. 22, при виде сверху транспортного средства, центр колеса перемещается к внешней стороне движения при повороте транспортного средства во время операции выполнения руления. Следовательно, система подвески может обеспечивать дополнительное преимущество от уменьшения осевой силы зубчатой рейки за счет компоновки с размещением вала 14 зубчатой рейки на задней стороне от полуоси, аналогично этому варианту осуществления.
Настоящее изобретение также является применимым к устройству подвески, имеющему конструкции тяг, отличные от вышеуказанных работающего на сжатие типа и работающего на растяжение типа.
[0144] Преимущество
(1) Точки соединения на стороне кузова транспортного средства первого и второго элементов тяг располагаются на передней стороне от полуоси в направлении вперед и назад транспортного средства. Следовательно, можно реализовывать настоящее изобретение в форме устройства подвески работающего на растяжение типа.
(2) В вышеуказанном устройстве подвески работающего на растяжение типа элемент рулевой зубчатой рейки располагается на задней стороне от полуоси в направлении вперед и назад транспортного средства. Следовательно, колесо сдвигается к внешней стороне по отношению к повороту во время операции выполнения руления, и осевая сила рулевой зубчатой рейки может быть снижена.
[0145] Пример 2 варианта применения
Хотя первый вариант осуществления поясняется посредством использования примера, в котором устройство 1B подвески применяется к системе подвески для управляемых передних колес, устройство 1B подвески также является применимым к системе подвески для неуправляемых задних колес.
В этом случае, когда транспортное средство переходит вследствие операции выполнения руления в состояние поворачивания, и боковая или поперечная сила прикладывается к заднему колесу, работающий на растяжение стержень и работающий на сжатие стержень изгибаются за счет действия боковой силы, точка пересечения этих стержней при виде сверху транспортного средства перемещается, и направление колеса изменяется относительно кузова транспортного средства (см. фиг. 8 и 22). А именно, элемент нижней тяги, протягивающийся вдоль полуоси, имеет небольшую величину перемещения в направлении вперед и назад за счет действия боковой силы, и другой элемент нижней тяги, расположенный под углом относительно полуоси так, что возникает угол в направлении вперед и назад, имеет большую величину перемещения в направлении вперед и назад за счет действия боковой силы. Посредством использования этой характеристики, можно реализовывать намеченное подруливание за счет податливости.
[0146] Преимущество
Первый и второй элементы тяг для соединения механизма ступицы колеса и кузова транспортного средства выполнены с возможностью пересекать друг друга при виде сверху транспортного средства на нижней стороне от полуоси в направлении вверх и вниз транспортного средства.
Следовательно, элементы тяг изгибаются за счет действия боковой силы во время поворота, точка пересечения элементов тяг при виде сверху транспортного средства сдвигается, и, как следствие, направление колеса может быть изменено относительно кузова транспортного средства. Следовательно, можно реализовывать намеченное подруливание за счет податливости.
[0147] Пример 3 варианта применения
Хотя первый вариант осуществления поясняется посредством использования примера, в котором устройство 1B подвески применяется к системе подвески для управляемых передних колес, устройство 1B подвески также является применимым к системе подвески для управляемых задних колес.
Кроме того, в этом случае воображаемая нижняя точка поворота может сдвигаться к внутренней стороне транспортного средства в направлении ширины или в поперечном направлении транспортного средства, аналогично первому варианту осуществления. Кроме того, ось поворотного шкворня, заданная посредством этой воображаемой нижней точки поворота, задается так, что она проходит через поверхность или пятно контакта шины и земли в нейтральной позиции рулевого колеса, и плечо стабилизации задается так, что оно находится в пределах поверхности или пятна контакта шины и земли. Следовательно, можно снижать момент вокруг оси поворотного шкворня. Следовательно, можно выполнять руление колесами за счет меньшей осевой силы зубчатой рейки, управлять направлением колес за счет меньшей силы и, вследствие этого, улучшать управляемость и стабильность.
[0148] Пример 4 варианта применения
В первом варианте осуществления, ось поворотного шкворня задается так, что она проходит через поверхность контакта шины и земли в нейтральной позиции рулевого колеса, плечо стабилизации задается в пределах поверхности контакта шины и земли, и в качестве примера, плечо стабилизации задается равным значению около нуля.
В отличие от этого задания, в этом примере варианта применения, позиция, через которую проходит ось поворотного шкворня, или состояние задания плеча стабилизации ограничивается диапазоном от центра пятна контакта шины и земли до переднего края пятна контакта шины и земли.
Преимущество
В случае компоновки задания позиции, через которую проходит ось поворотного шкворня, или плеча стабилизации в диапазоне от центра пятна контакта шины и земли до переднего края пятна контакта шины и земли, можно достигать обеспечения способности к прямолинейному движению и уменьшения тяжести операции руления одновременно и, вследствие этого, улучшать управляемость и безопасность.
[0149] Пример 5 варианта применения
В первом варианте осуществления, область, окруженная посредством штрихпунктирной линии с одной точкой в координатной плоскости, показанной на фиг. 7, выбирается в качестве примера области, достаточной для задания. В отличие от этого, можно задавать, в качестве соответствующей области задания, внутреннюю область (в направлении понижения поперечного наклона поворотного шкворня и направлении увеличения радиуса плеча обкатки колеса) в диапазоне, представленном посредством граничной линии, определенной посредством изоплетической линии, которая используется в качестве граничной линии и которая является линией равного значения осевой силы зубчатой рейки, на которую обращается внимание.
Преимущество
Можно допускать наибольшее значение осевой силы зубчатой рейки и задавать геометрию подвески в рамках диапазона, меньшего или равного наибольшему значению осевой силы зубчатой рейки.
[0150] Пример 6 варианта применения
В примере, поясненном в первом варианте осуществления, секция 54 компенсации возмущений предоставляется в секции SG обеспечения способности к прямолинейному движению. Тем не менее, настоящее изобретение не ограничено этой конфигурацией. Можно использовать конфигурацию, показанную на фиг. 23. В конфигурации, показанной на фиг. 23, секция 54 компенсации возмущений предоставляется независимо от секции SG обеспечения способности к прямолинейному движению и выполнена с возможностью выводить величину Adis компенсации возмущений в сумматор 57, который суммирует величину Adis компенсации возмущений с целевым углом δ*a поворота при выполнении руления после суммирования, выведенным из сумматора 56e.
Преимущество
В этой конфигурации, величина Adis компенсации возмущений всегда суммируется с целевым углом δ* поворота при выполнении руления. Следовательно, система управления может ограничивать влияние возмущений всегда независимо того, определяется или нет состояние начала руления.
[0151] Пример 7 варианта применения
В примере, используемом для того, чтобы пояснять первый вариант осуществления, секция SG обеспечения способности к прямолинейному движению формируется посредством секции 52 управления углом поворота при выполнении руления, секции 53 дополнения способности к прямолинейному движению и секции 54 компенсации возмущений, и система управления выполнена с возможностью вводить целевой угол δ* поворота при выполнении руления напрямую в секцию 58 вычисления отклонения угла поворота при выполнении руления без выполнения управления обеспечением способности к прямолинейному движению для суммирования величины δa управления обеспечением способности к прямолинейному движению с целевым углом δ* поворота при выполнении руления в течение начального периода T1 отклика в состоянии начала руления, чтобы начинать операцию руления влево или вправо из состояния поддержания нейтральной позиции.
[0152] Тем не менее, настоящее изобретение не ограничено вышеуказанной конфигурацией. В состоянии начала руления, чтобы начинать операцию руления влево или вправо из нейтрального состояния, в некотором случае возникает разность углов поворота между углом θs поворота при выполнении руления, считываемым посредством датчика 4 угла поворота при выполнении руления, и углом θmo поворота, считываемым посредством датчика 9 угла поворота актуатора рулевого управления. В этом случае, желательно формировать крутящий момент с помощью актуатора 8 рулевого управления для компенсации разности углов поворота между углом θs поворота при выполнении руления и углом θmo поворота, чтобы обеспечивать способность к прямолинейному движению.
[0153] Следовательно, как показано на фиг. 24, желательно предоставлять секцию 111 компенсации способности к прямолинейному движению независимо от секции SG обеспечения способности к прямолинейному движению. Величина или значение Asc компенсации способности к прямолинейному движению, выведенная из этой секции 111 компенсации способности к прямолинейному движению, суммируется, посредством сумматора 57, с целевым углом δ*a поворота при выполнении руления после суммирования, выведенным из сумматора 56e.
В одной конфигурации секции 111 компенсации способности к прямолинейному движению, секция 111 компенсации способности к прямолинейному движению вычисляет фактический угол поворота при выполнении руления из угла θmo поворота актуатора 8 рулевого управления, считываемого посредством датчика 9 угла поворота актуатора рулевого управления, и вычисляет величину Asc компенсации способности к прямолинейному движению, соответствующую фактическому углу поворота при выполнении руления, посредством поиска в карте управления, представляющей предварительно определенную взаимосвязь между фактическим углом поворота при выполнении руления и величиной Asc компенсации способности к прямолинейному движению.
[0154] В другой конфигурации секции 111 компенсации способности к прямолинейному движению, секция 111 компенсации способности к прямолинейному движению определяет осевую силу зубчатой рейки для вала 14 зубчатой рейки посредством использования датчика осевой силы зубчатой рейки, такого как тензодатчик, или посредством оценки осевой силы зубчатой рейки и вычисляет величину Asc компенсации способности к прямолинейному движению посредством поиска в карте управления, представляющей предварительно определенную взаимосвязь между осевой силой зубчатой рейки и величиной Asc компенсации способности к прямолинейному движению.
В еще одной другой конфигурации секции 111 компенсации способности к прямолинейному движению секция 111 компенсации способности к прямолинейному движению вычисляет фактический угол поворота при выполнении руления из угла θmo поворота актуатора 8 рулевого управления, считываемого посредством датчика 9 угла поворота актуатора рулевого управления, и суммирует величину Asc компенсации способности к прямолинейному движению, которая является предварительно определенным постоянным значением, с целевым углом δ*a поворота при выполнении руления после суммирования в сумматоре 57, когда вычисленный фактический угол поворота при выполнении руления находится в рамках диапазона, равного или меньшего предварительно определенного значения, по обеим сторонам от нейтральной позиции, заданной в центре.
[0155] Преимущество
В этом случае, когда разность углов поворота формируется между углом θs поворота при выполнении руления, считываемым посредством датчика 4 угла поворота при выполнении руления, и углом θmo поворота, считываемым посредством датчика 9 угла поворота актуатора рулевого управления, в состоянии начала руления с началом операции руления влево или вправо из нейтрального состояния, можно формировать крутящий момент, чтобы компенсировать разность углов поворота между углом θs поворота при выполнении руления и углом θmo поворота, с помощью актуатора 8 рулевого управления, чтобы обеспечивать способность к прямолинейному движению.
[0156] Пример 8 варианта применения
В примере, поясненном в первом варианте осуществления, управление обеспечением способности к прямолинейному движению, чтобы суммировать величину δa управления обеспечением способности к прямолинейному движению с целевым углом δ* поворота при выполнении руления, начинается сразу способом, показанным посредством ступенчатой характеристической линии L10 в конце начального периода.
Тем не менее, настоящее изобретение не ограничено этим. Как показано посредством характеристической линии L12, показанной посредством штрихпунктирной линии с одной точкой на фиг. 20(b), можно начинать управление обеспечением способности к прямолинейному движению посредством постепенного увеличения величины δa управления обеспечением способности к прямолинейному движению после истечения начального периода. Кроме того, как показано на фиг. 20(b), можно начинать управление обеспечением способности к прямолинейному движению посредством постепенного увеличения величины δa управления обеспечением способности к прямолинейному движению вдоль линейной характеристической линии L13 с постоянным наклоном.
[0157] Чтобы варьировать наклоны этих характеристических линий, можно регулировать наклон посредством варьирования усиления Ga контура управления с прохождением времени, вместо изменения усиления Ga контура управления между "0" и "1" с помощью секции 56c регулировки усиления.
[0158] Преимущество
В этих случаях, система управления может увеличивать величину управления обеспечением способности к прямолинейному движению для управления обеспечением способности к прямолинейному движению посредством системы SBW рулевого управления по проводам постепенно и за счет этого начинать управление обеспечением способности к прямолинейному движению стабильно и плавно посредством ограничения большого изменения величины обеспечения способности к прямолинейному движению.
[0159] Пример разновидности первого варианта осуществления
В примере, поясненном в первом варианте осуществления, секция 56c регулировки усиления секции 56 управления задержкой задает усиление Ga контура управления равным "0" в течение начального периода T1 в состоянии начала руления с началом операции руления из нейтрального состояния, в котором рулевое колесо 2 удерживается в нейтральной позиции, и задает усиление Ga контура управления равным "1" в другие периоды. Тем не менее, настоящее изобретение не ограничено вышеуказанной конфигурацией. По своему усмотрению можно задавать усиление Ga контура управления равным "1" в течение начального периода T1, задавать усиление Ga контура управления равным, например, "0,8" в течение среднего и последнего периодов T2 и T3 после истечения начального периода T1, задавать усиление Ga контура управления равным "1" в другой период и тем самым варьировать режим управления обеспечением способности к прямолинейному движению устройства 1B подвески в соответствии с состоянием движения транспортного средства.
[0160] Второй вариант осуществления
Далее приводится пояснение в отношении второго варианта осуществления настоящего изобретения.
Моторное транспортное средство 1 согласно второму варианту осуществления по функции и конструкции является идентичным фиг. 1 в первом варианте осуществления. Моторное транспортное средство 1 согласно второму варианту осуществления отличается по конструкции устройства 1B подвески от первого варианта осуществления.
[0161] Следовательно, нижеприведенное пояснение направлено на конструкцию устройства 1B подвески.
Фиг. 25 является видом в перспективе, схематично показывающим конструкцию устройства подвески или системы 1B подвески согласно второму варианту осуществления. Фиг. 26 является видом в плане, схематично показывающим конструкцию устройства 1B подвески по фиг. 25. Фиг. 27(a) и фиг. 27(b) являются видом спереди в частичном сечении и видом сбоку в частичном сечении, схематично показывающими конструкцию устройства 1B подвески по фиг. 25. Фиг. 28(a) является видом в плане в частичном сечении (для левого переднего колеса), схематично показывающим конструкцию устройства 1B подвески по фиг. 25, и фиг. 28(b) является видом, показывающим пятно контакта или поверхность контакта шины и земли (для правого переднего колеса).
[0162] Как показано на фиг. 28-30, устройство подвески или система 1B подвески является устройством подвески работающего на сжатие типа, поддерживающим колеса 17FR и 17FL, присоединенные к механизмам WH ступиц колес, и включает в себя, на каждой из правой и левой сторон, стакан 33 полуоси, включающий в себя ось 32 или вал колеса (полуось), поддерживающую колесо 17FR или 17FL с возможностью вращения, множество элементов тяг, расположенных в направлении ширины кузова транспортного средства от поддерживающего участка на внутренней стороне или стороне кузова транспортного средства и соединенных со стаканом 33 полуоси, и пружинный элемент 34, такой как спиральная пружина.
[0163] Элементы тяг включают в себя поперечную тягу 137 (элемент поперечной тяги) и работающую на сжатие тягу 138 (элемент работающей на сжатие тяги), которые являются элементами нижних тяг, поперечную рулевую тягу 15 (элемент поперечной рулевой тяги) и стойку (пружинный элемент 34 и амортизатор 40). В этом варианте осуществления, устройство 1B подвески является системой подвески стоечного типа, и стойка ST, сформированная в качестве единого блока посредством пружинного элемента 34 и амортизатора 40, протягивается к верхнему концу, соединенному с поддерживающим участком на стороне кузова транспортного средства, расположенным выше полуоси 32 (в дальнейшем в этом документе, верхний конец стойки ST упоминается как "верхняя точка поворота" надлежащим образом).
[0164] Поперечная тяга 137 и работающая на сжатие тяга 138, формирующие нижние тяги, соединяют поддерживающий участок на стороне кузова транспортного средства, расположенный ниже полуоси 32, с нижним концом стакана 33 полуоси. В этом варианте осуществления, поперечная тяга 137 и работающая на сжатие тяга 138 имеют форму I-образного рычага, независимого друг от друга. Поперечная тяга 137 и работающая на сжатие тяга 138 соединяются с кузовом транспортного средства в двух соответствующих поддерживающих участках и соединяются со стороной полуоси 32 в двух соответствующих поддерживающих участках.
[0165] Кроме того, поперечная тяга 137 и работающая на сжатие тяга 138 в этом варианте осуществления выполнены с возможностью соединять кузов 1A транспортного средства и сторону полуоси 32 (стакан 33 полуоси) друг с другом в пересекающемся или перекрещивающемся состоянии, в котором поперечная и работающая на сжатие тяги 137 и 138 пересекают друг друга (в дальнейшем в этом документе, точка пересечения между воображаемыми тягами, сформированная посредством поперечной тяги 137 и работающей на сжатие тяги 138, упоминается как "нижняя точка поворота" надлежащим образом).
[0166] Из этих нижних тяг, поперечная тяга 137 располагается таким образом, что поперечная тяга 137 является приблизительно параллельной полуоси. При виде сверху транспортного средства поддерживающая точка Ta на стороне колеса поперечной тяги 137 находится на задней стороне от центра колеса (полуоси) в направлении вперед и назад транспортного средства. Работающая на сжатие тяга 138 располагается таким образом, что работающая на сжатие тяга 138 наклоняется относительно полуоси больше поперечной тяги 137 (работающая на сжатие тяга 138 располагается таким образом, что поддерживающая точка на стороне колеса находится на передней стороне, а поддерживающая точка на стороне кузова транспортного средства находится на задней стороне). Поддерживающая точка Ca на стороне колеса работающей на сжатие тяги 138 находится на передней стороне от центра колеса в направлении вперед и назад транспортного средства. Поддерживающая точка Tb на стороне кузова транспортного средства поперечной тяги 137 находится на задней стороне от поддерживающей точки Ca на стороне колеса работающей на сжатие тяги 138 в направлении вперед и назад транспортного средства. Поддерживающая точка Cb на стороне кузова транспортного средства работающей на сжатие тяги 138 находится на задней стороне от поддерживающей точки Ta на стороне колеса поперечной тяги 137 в направлении вперед и назад транспортного средства.
[0167] В этой компоновке тяг, когда центробежная сила к внешней стороне по отношению к повороту кузова транспортного средства действует в центре O контакта шины и земли (точке приложения силы), боковая или поперечная сила, действующая к центру поворота, против центробежной силы, может возникать, главным образом, за счет поперечной тяги 137. Кроме того, в этой компоновке тяг поддерживающая точка Tb на стороне кузова транспортного средства поперечной тяги 137 располагается на передней стороне от центра колеса в направлении вперед и назад транспортного средства. Следовательно, когда боковая сила (действующая в направлении внутрь к центру транспортного средства) вводится в колесо, поддерживающая точка Ta на стороне колеса поперечной тяги 137 перемещается в направлении внутрь к центру транспортного средства, и поддерживающая точка Ca на стороне колеса работающей на сжатие тяги 138 перемещается в направлении наружу к внешней стороне транспортного средства. Следовательно, эта компоновка тяг может реализовывать подруливание за счет податливости, чтобы направлять колесо в направлении расхождения колес против введенной боковой силы.
[0168] Поперечная рулевая тяга 15 находится на нижней стороне от полуоси 32 и выполнена с возможностью соединять элемент 14 рулевой зубчатой рейки со стаканом 33 полуоси. Элемент 14 рулевой зубчатой рейки выполнен с возможностью передавать вращающую силу (силу поворота при выполнении руления), введенную из рулевого колеса 2, и тем самым формировать силу на валу или осевую силу для поворота или руления колесами. Следовательно, стакан 33 полуоси принимает осевую силу в направлении ширины транспортного средства из поперечной рулевой тяги 15 в соответствии с вращением рулевого колеса 2 и, вследствие этого, поворачивает либо выполняет руление колесом 17FR или 17FL.
[0169] В устройстве 1B подвески согласно этому варианту осуществления, как показано на фиг. 28(b), ось поворотного шкворня задается таким образом, что ось поворотного шкворня проходит через поверхность контакта или пятно контакта шины и земли в нейтральном состоянии, в котором рулевое колесо находится в нейтральной позиции, и плечо стабилизации находится внутри поверхности контакта шины и земли. В частности, в устройстве 1B подвески по этому варианту осуществления, угол продольного наклона поворотного шкворня задается равным значению около нуля, и ось поворотного шкворня задается таким образом, что плечо стабилизации приближается к нулю. Это задание позволяет уменьшать крутильный крутящий момент шины или крутящий момент шины на кручение во время операции выполнения руления, чтобы выполнять руление колесом, и уменьшать момент вокруг оси поворотного шкворня. Кроме того, радиус плеча обкатки колеса задается как положительное плечо обкатки колеса, при котором радиус плеча обкатки колеса превышает или равен нулю. При таком задании плечо стабилизации формируется с величиной, соответствующей радиусу плеча обкатки колеса относительно угла β бокового скольжения на стороне шины во время операции выполнения руления, чтобы выполнять руление колесом, и, следовательно, система подвески может обеспечивать способность к прямолинейному движению или рабочие характеристики движения по прямой.
[0170] В этом варианте осуществления, поперечная тяга 137 и работающая на сжатие тяга 138, выступающие в качестве элементов нижних тяг, соединяют кузов 1 транспортного средства и сторону полуоси 32 (нижний конец стакана 33 полуоси) друг с другом в пересекающемся или перекрещивающемся состоянии, в котором поперечная тяга 137 и работающая на сжатие тяга 138 пересекают друг друга. Эта пересекающаяся компоновка позволяет задавать поперечный наклон (угол поперечного наклона) поворотного шкворня меньшим и задавать радиус плеча обкатки колеса большим на стороне положительного плеча обкатки колеса по сравнению с непересекающейся компоновкой, в которой поперечная и работающая на сжатие тяги 137 и 138 не пересекают друг друга. Следовательно, система подвески может снижать крутильный крутящий момент шины во время операции выполнения руления и уменьшать осевую силу зубчатой рейки, требуемую для операции выполнения руления. Кроме того, согласно этому варианту осуществления, воображаемая нижняя точка поворота перемещается к расположенной внутри или внутренней стороне кузова транспортного средства за счет действия боковой силы, действующей на колесо во время операции выполнения руления, так что можно улучшать способность к прямолинейному движению вследствие стабилизирующего крутящего момента (SAT).
[0171] В дальнейшем в этом документе подробно анализируется геометрия подвески в устройстве 1B подвески.
Анализ компонента осевой силы зубчатой рейки
Взаимосвязь между ходом зубчатой рейки и осевой силой зубчатой рейки во время операции выполнения руления показывается на фиг. 5.
Как показано на фиг. 5, осевая сила зубчатой рейки содержит, главным образом, крутильный крутящий момент шины и крутящий момент при подъеме колеса. Из этих компонентов осевой силы зубчатой рейки, крутильный крутящий момент шины является преобладающим.
Следовательно, можно уменьшать осевую силу зубчатой рейки посредством снижения крутильного крутящего момента шины.
[0172] Минимизация крутильного крутящего момента шины
Траектория или след центра поверхности контакта шины и земли во время операции выполнения руления являются идентичными траектории или следу, показанным на фиг. 6. Фиг. 6 показывает характеристику в случае, если перемещение центра поверхности контакта шины и земли или центра пятна контакта шины и земли является большим при операции выполнения руления, и характеристику в случае, если перемещение центра поверхности контакта шины и земли является небольшим при операции выполнения руления.
Как видно из вышеуказанного результата компонентов осевой силы зубчатой рейки, эффективно минимизировать крутильный крутящий момент шины во время операции выполнения руления с тем, чтобы уменьшать осевую силу зубчатой рейки. Чтобы минимизировать крутильный крутящий момент шины при операции выполнения руления, уместно уменьшать траекторию центра поверхности контакта шины и земли, как показано на фиг. 6. А именно, можно минимизировать крутильный крутящий момент шины посредством задания центра поверхности контакта шины и земли и точки контакта или пересечения поворотного шкворня и земли в согласованной или в идентичной позиции. Конкретно, эффективно задавать плечо стабилизации равным 0 мм и радиус плеча обкатки колеса равным или превышающим 0 мм.
[0173] Влияние поперечного наклона поворотного шкворня
Изолинейная или изоплетическая схема, показывающая один пример распределения осевой силы зубчатой рейки в системе координат с использованием, в качестве осей, поперечного наклона поворотного шкворня и радиуса плеча обкатки колеса, также является идентичным изолинейной или изоплетической схеме, упомянутой и показанной на фиг. 7. Фиг. 7 показывает три изоплетических линии или линии равного значения для небольших, средних и больших значений осевой силы зубчатой рейки. Относительно ввода крутильного крутящего момента шины, по мере того, как поперечный наклон поворотного шкворня становится больше, его момент вращения становится больше, и осевая сила зубчатой рейки становится больше. Соответственно, желательно задавать поперечный наклон поворотного шкворня меньшим предварительно определенного значения. Тем не менее, из взаимосвязи с радиусом плеча обкатки колеса, можно снижать осевую силу зубчатой рейки до требуемого уровня посредством задания поперечного наклона поворотного шкворня, например, меньшим или равным 15 градусов.
[0174] Область, окруженная посредством штрихпунктирных линий с одной точкой (граничных линий) на фиг. 7, является областью, в которой поперечный наклон поворотного шкворня меньше угла в 15 градусов, что представляет собой значение, оцененное как значение, при котором боковая сила превышает предел трения, и в то же время радиус плеча обкатки колеса превышает или равен 0 мм с вышеуказанной точки зрения крутильного крутящего момента шины. В этом варианте осуществления, эта область (в направлении снижения поперечного наклона поворотного шкворня от 15 градусов по горизонтальной оси и в направлении повышения радиуса плеча обкатки колеса от нуля по вертикальной оси) трактуется в качестве области, более подходящей для задания. Тем не менее, даже в области, в которой радиус плеча обкатки колеса является отрицательным, можно получать определенное преимущество посредством показа другого состояния в этом варианте осуществления.
[0175] Конкретно, при определении радиуса плеча обкатки колеса и поперечного наклона поворотного шкворня, например, можно аппроксимировать изоплетическую линию или линию равного значения, представляющую распределение осевой силы зубчатой рейки, с помощью кривой под n градусов (n является целым числом, большим или равным 2) и использовать значение, определенное в соответствии с позицией точки изгиба кривой под n градусов (или пикового значения) в области, окруженной посредством штрихпунктирных линий с одной точкой.
[0176] Конкретные примеры конструкции
Далее приводится пояснение в отношении конкретных примеров конструкций, реализующих или осуществляющих устройство 1B подвески.
Фиг. 29 является схематичным видом, показывающим пример конструкции устройства 1B подвески с помощью устройства подвески работающего на сжатие типа. В примере, показанном на фиг. 29, при виде сверху транспортного средства, поперечная тяга 137 (работающий на растяжение стержень) протягивается вдоль полуоси, а работающая на сжатие тяга 138 (работающий на сжатие стержень) протягивается назад от полуоси и соединяется с кузовом транспортного средства в позиции на задней стороне от полуоси.
[0177] Как показано на фиг. 29, в компоновке с двумя поворотными элементами, в которой элементы нижних тяг выполнены с возможностью пересекать друг друга в системе подвески работающего на сжатие типа, элементы нижних тяг обеспечивают такую операцию выполнения руления, чтобы направлять колесо по мере поворота внешнего колеса по внешней стороне по отношению к движению при повороте транспортного средства, посредством вращения вперед к передней части транспортного средства вокруг поддерживающих точек на стороне кузова транспортного средства (состояние, показанное посредством пунктирных линий). В этом случае, воображаемая нижняя точка поворота размещается в точке пересечения между элементами нижних тяг. Эта компоновка подвески позволяет задавать воображаемую нижнюю точку поворота в позиции на расположенной внутри стороне или внутренней стороне кузова транспортного средства по сравнению с непересекающейся компоновкой подвески, в которой элементы нижних тяг не пересекаются. Следовательно, эта компоновка подвески позволяет задавать начальный радиус плеча обкатки колеса большим в направлении положительного плеча обкатки колеса.
[0178] В системе подвески работающего на сжатие типа, показанной на фиг. 29, поскольку угол поворота работающего на сжатие стержня является большим при операции выполнения руления, воображаемая нижняя точка поворота сдвигается к внутренней стороне. В этом случае, при виде сверху транспортного средства, с точки зрения, сфокусированной на расстоянии от центровой линии шины в направлении вперед и назад шины до воображаемой нижней точки поворота, воображаемая нижняя точка поворота перемещается в направлении внутрь от центровой линии шины на внутренней стороне центровой линии шины, и, следовательно, радиус плеча обкатки колеса становится больше в направлении к положительному плечу обкатки колеса. Следовательно, в системе подвески работающего на сжатие типа, когда применяется этот вариант осуществления, осевая сила зубчатой рейки снижается при операции выполнения руления по мере поворота внешнего колеса.
[0179] В случае системы подвески работающего на сжатие типа, в которой элементы нижних тяг не пересекаются, поскольку угол поворота работающего на сжатие стержня является большим при операции выполнения руления, воображаемая нижняя точка поворота сдвигается к внешней стороне. В этом случае, при виде сверху транспортного средства расстояние от центровой линии шины в направлении вперед и назад шины до воображаемой нижней точки поворота находится на внешней стороне центровой линии шины, и, следовательно, радиус плеча обкатки колеса становится больше в направлении к отрицательному плечу обкатки колеса. Следовательно, осевая сила зубчатой рейки увеличивается при операции выполнения руления.
[0180] Кроме того, в примере, показанном на фиг. 29, при виде сверху транспортного средства, центр колеса перемещается к внутренней стороне движения при повороте транспортного средства во время операции выполнения руления. Следовательно, система подвески может обеспечивать дополнительное преимущество от уменьшения осевой силы зубчатой рейки за счет компоновки с размещением вала 14 зубчатой рейки на передней стороне или впереди полуоси, аналогично этому варианту осуществления.
Взаимосвязь между углом схождения-расхождения колес и радиусом плеча обкатки колеса в системе подвески работающего на сжатие типа, включающей в себя элементы нижних тяг в непересекающейся компоновке и систему подвески согласно этому варианту осуществления, является идентичной взаимосвязи, показанной на фиг. 9.
Как показано на фиг. 9, по сравнению с непересекающейся компоновкой элементов нижних тяг, компоновка согласно этому варианту осуществления может дополнительно увеличивать радиус плеча обкатки колеса около нейтральной позиции (в которой угол схождения-расхождения колес является нулевым). Кроме того, в направлении увеличения угла поворота при выполнении руления в поворачивающем внешнем колесе (в направлении "-" на фиг. 9), радиус плеча обкатки колеса увеличивается, и можно снижать осевую силу зубчатой рейки.
[0181] Способность к прямолинейному движению при положительном плече обкатки колеса
Концептуальный вид для иллюстрации стабилизирующего крутящего момента при задании положительного плеча обкатки колеса является идентичным фиг. 11.
Как показано на фиг. 11, восстанавливающая сила (стабилизирующий крутящий момент), действующая на шину, увеличивается пропорционально сумме плеча стабилизации и увода пневматической шины.
В случае положительного плеча обкатки колеса, можно рассматривать, в качестве плеча стабилизации, расстояние εc (см. фиг. 11) от центра колеса, определенное посредством позиции опоры перпендикулярной линии, проведенной от точки контакта с землей оси поворотного шкворня, до прямой линии, протягивающейся через центр контакта шины и земли в направлении угла β бокового скольжения на стороне шины.
Следовательно, восстанавливающая сила, действующая на шину во время операции выполнения руления, становится больше по мере того, как становится больше радиус плеча обкатки колеса для положительного плеча обкатки колеса.
[0182] В этом варианте осуществления, ось поворотного шкворня задается в компоновке положительного плеча обкатки колеса, и можно обеспечивать начальный радиус плеча обкатки колеса на большом уровне по сравнению с компоновкой непересекающихся элементов нижних тяг. Следовательно, система подвески по этому варианту осуществления может уменьшать влияние на способность к прямолинейному движению посредством задания угла продольного наклона поворотного шкворня более близким к нулю. Кроме того, посредством использования режима рулевого управления по проводам, система подвески может в итоге обеспечивать намеченную способность к прямолинейному движению с помощью актуатора 8 рулевого управления.
[0183] Работа
Далее приводится пояснение в отношении работы устройства 1B подвески согласно этому варианту осуществления.
В устройстве 1B подвески согласно этому варианту осуществления два элемента нижних тяг имеют форму I-образного рычага. Поперечная тяга 137 выполнена с возможностью идти в направлении ширины транспортного средства от стакана 33 полуоси, а работающая на сжатие тяга 138 выполнена с возможностью идти под углом к задней части транспортного средства от нижнего конца стакана 33 полуоси в пересекающемся состоянии с пересечением поперечной тяги 137. В частности, поддерживающая точка Ta на стороне колеса поперечной тяги 137 находится на задней стороне от центра колеса в направлении вперед и назад транспортного средства. Поддерживающая точка Ca на стороне колеса работающей на сжатие тяги 138 находится на передней стороне от центра колеса в направлении вперед и назад транспортного средства. Поддерживающая точка Tb на стороне кузова транспортного средства поперечной тяги 137 находится на задней стороне от поддерживающей точки Ca на стороне колеса работающей на сжатие тяги 138 в направлении вперед и назад транспортного средства. Поддерживающая точка Cb на стороне кузова транспортного средства работающей на сжатие тяги 138 находится на задней стороне от поддерживающей точки Ta на стороне колеса поперечной тяги 137 в направлении вперед и назад транспортного средства.
[0184] В этой компоновке подвески боковая или поперечная сила, введенная в колесо во время операции выполнения руления и т.п., может возникать, по большей части, за счет поперечной тяги 137. Кроме того, в случае ввода боковой силы в направлении внутрь к центру транспортного средства в колесо на внешней стороне по отношению к повороту, поперечная тяга 137 вращается к внутренней стороне, а работающая на сжатие тяга 138 вращается к внешней стороне. Следовательно, эта компоновка тяг может предоставлять характеристику расхождения колес для колеса.
[0185] В этой конструкции подвески, для каждого из элементов нижних тяг, прямая линия воображаемо соединяет внутреннюю поддерживающую точку на стороне кузова транспортного средства с внешней поддерживающей точкой на стороне колеса. Точка пересечения этих воображаемых прямых линий служит в качестве воображаемой нижней точки поворота нижних тяг. Ось поворотного шкворня является прямой линией, соединяющей эту воображаемую нижнюю точку поворота с верхней точкой поворота, сформированной посредством верхнего конца стойки.
В этом варианте осуществления, ось поворотного шкворня задается таким образом, что плечо стабилизации находится внутри поверхности контакта или пятна контакта шины и земли.
[0186] Например, ось поворотного шкворня задается таким образом, что угол продольного наклона поворотного шкворня равен 0 градусов, плечо стабилизации равно 0 мм, и радиус плеча обкатки колеса является значением положительного плеча обкатки колеса, большим или равным 0 мм. Кроме того, поперечный наклон поворотного шкворня задается в таком диапазоне (например, меньшем или равном 15 градусов), что поперечный наклон поворотного шкворня становится небольшим в рамках диапазона, допускающего становление радиуса плеча обкатки колеса положительным.
При такой заданной геометрии подвески система подвески позволяет задавать меньшим след или траекторию центра поверхности контакта шины и земли во время операции выполнения руления и уменьшать крутильный крутящий момент шины.
[0187] Следовательно, система подвески может уменьшать осевую силу зубчатой рейки, как следствие, уменьшать момент вокруг оси поворотного шкворня и уменьшать вывод актуатора 8 рулевого управления. Кроме того, система подвески может управлять направлением колеса за счет меньшей силы и, вследствие этого, улучшать стабильность и управляемость.
В устройстве 1B подвески согласно этому варианту осуществления два элемента нижних тяг размещаются в пересекающемся состоянии с пересечением друг друга. В этой конструкции, проще располагать воображаемую нижнюю точку поворота на внутренней стороне центра поверхности контакта шины и земли.
[0188] Следовательно, проще задавать поперечный наклон поворотного шкворня равным значению, более близкому к 0 градусов, и увеличивать радиус плеча обкатки колеса на стороне положительного плеча обкатки колеса.
Кроме того, несмотря на возможность влияния на способность к прямолинейному движению конструкции подвески, посредством задания угла продольного наклона поворотного шкворня равным 0 градусов и плеча стабилизации равным 0 мм, задание положительного плеча обкатки колеса уменьшает это влияние. Кроме того, система подвески обеспечивает способность к прямолинейному движению посредством добавления управления с помощью актуатора 8 рулевого управления. Таким образом, система подвески может улучшать стабильность и управляемость.
[0189] Кроме того, что касается ограничения поперечного наклона поворотного шкворня предварительно определенным диапазоном, за счет операции выполнения руления актуатора 8 рулевого управления можно не допускать возникновения ощущения тяжести у водителя. Что касается отдачи посредством внешней силы от поверхности дороги, система подвески может справляться с внешней силой с помощью актуатора 8 рулевого управления и тем самым не допускать влияния на водителя. Таким образом, система подвески может улучшать стабильность и управляемость.
[0190] Как упомянуто выше, устройство 1B подвески согласно этому варианту осуществления позволяет задавать воображаемую нижнюю точку поворота к внутренней стороне в направлении ширины транспортного средства вследствие пересекающейся компоновки поперечной тяги 137, протягивающейся приблизительно параллельно полуоси, и работающей на сжатие тяги 138, пересекающей поперечную тягу 137 при виде сверху транспортного средства. Кроме того, ось поворотного шкворня, заданная посредством этой воображаемой нижней точки поворота, задается таким образом, что поперечный наклон поворотного шкворня является небольшим, и плечо стабилизации формируется внутри поверхности или пятна контакта шины и земли. Следовательно, устройство подвески может снижать момент вокруг оси поворотного шкворня.
[0191] Следовательно, устройство подвески обеспечивает такую операцию выполнения руления, чтобы выполнять руление колесами за счет меньшей осевой силы зубчатой рейки и управлять направлениями колес за счет меньшей силы, так что устройство подвески может улучшать стабильность и управляемость.
В результате снижения момента вокруг оси поворотного шкворня, устройство подвески может уменьшать нагрузку, прикладываемую на валу 14 зубчатой рейки и поперечной рулевой тяге(ах) 15, так что можно упрощать составные части.
Кроме того, можно использовать актуатор с меньшей производительностью по приведению в действие в качестве актуатора 8 рулевого управления, реализующего систему рулевого управления по проводам, и тем самым уменьшать стоимость и вес транспортного средства.
[0192] Например, по сравнению с традиционной системой подвески на основе рулевого управления по проводам, конструкция согласно этому варианту осуществления позволяет уменьшать вес приблизительно на 10% и уменьшать стоимость приблизительно на 50%, главным образом, посредством упрощения элементов нижних тяг и уменьшения размера актуатора 8 рулевого управления.
Кроме того, устройство подвески имеет конструкцию с возможностью увеличивать плечо стабилизации во время операции выполнения руления. Следовательно, устройство подвески может ограничивать увеличение угла поворота при выполнении руления при операции движения на повороте, формирующей высокое поперечное ускорение или боковое ускорение.
[0193] Кроме того, поскольку воображаемая нижняя точка поворота перемещается к внутренней стороне посредством действия боковой силы, действующей на колесо во время операции выполнения руления, радиус плеча обкатки колеса увеличивается, и способность к прямолинейному движению посредством стабилизирующего крутящего момента (SAT) может быть повышена.
При пересекающейся компоновке элементов нижних тяг поддерживающая точка элемента нижней тяги может быть размещена около центра колеса, так что можно уменьшать вес стакана 33 полуоси.
[0194] Взаимосвязь между (углом) поперечного наклона поворотного шкворня и радиусом плеча обкатки колеса в этом варианте осуществления является идентичной взаимосвязи, показанной на фиг. 12. Фиг. 12 показывает, в дополнение к вышеуказанной компоновке работающего на сжатие типа согласно этому варианту осуществления, компоновку работающего на растяжение типа согласно этому варианту осуществления, и дополнительно показывает, в качестве сравнительных примеров, непересекающиеся компоновки работающего на растяжение типа и работающего на сжатие типа для непересекающихся элементов нижних тяг (см. второй вариант осуществления) и компоновку с одним поворотным элементом.
[0195] Как показано на фиг. 12, в практических примерах работающего на сжатие типа и работающего на растяжение типа согласно изобретению, можно задавать поперечный наклон поворотного шкворня равным углу, более близкому к 0 градусов, и задавать радиус плеча обкатки колеса равным большему значению на стороне положительного плеча обкатки колеса, по сравнению с примером с одним поворотным элементом и сравнительными примерами с двумя поворотными элементами и без пересечения для непересекающихся элементов нижних тяг.
В частности, в практическом примере для работающего на сжатие типа согласно этому варианту осуществления, можно получать большие преимущества касательно эффекта снижения поперечного наклона поворотного шкворня до нуля градусов и эффекта увеличения радиуса плеча обкатки колеса на стороне положительного плеча обкатки колеса.
[0196] Кроме того, поперечная тяга 137 размещается приблизительно параллельно полуоси, и поддерживающая точка Ta на стороне колеса поперечной тяги 137 располагается на задней стороне от центра колеса в направлении вперед и назад транспортного средства. Работающая на сжатие тяга 138 наклоняется больше поперечной тяги 137 относительно полуоси (расположена в такой ориентации, что поддерживающая точка на стороне колеса на передней стороне, а поддерживающая точка на стороне кузова транспортного средства находится на задней стороне). Поддерживающая точка Ca на стороне колеса работающей на сжатие тяги 138 находится на передней стороне от центра колеса в направлении вперед и назад транспортного средства. Поддерживающая точка Tb на стороне кузова транспортного средства поперечной тяги 137 находится на задней стороне от поддерживающей точки Ca на стороне колеса работающей на сжатие тяги 138 в направлении вперед и назад транспортного средства. Поддерживающая точка Cb на стороне кузова транспортного средства работающей на сжатие тяги 138 находится на задней стороне от поддерживающей точки Ta на стороне колеса поперечной тяги 137 в направлении вперед и назад транспортного средства.
[0197] В этой компоновке тяг боковая сила, введенная в колесо, может возникать, главным образом, за счет поперечной тяги 137. Кроме того, в этой компоновке тяг поддерживающая точка Tb на стороне кузова транспортного средства поперечной тяги 137 располагается на передней стороне от центра колеса в направлении вперед и назад транспортного средства. Следовательно, когда боковая сила (действующая в направлении внутрь к центру транспортного средства) вводится в колесо, поддерживающая точка Ta на стороне колеса поперечной тяги 137 перемещается в направлении внутрь к центру транспортного средства, и поддерживающая точка Ca на стороне колеса работающей на сжатие тяги 138 перемещается в направлении наружу к внешней стороне транспортного средства. Следовательно, эта компоновка тяг может реализовывать подруливание за счет податливости, чтобы направлять колесо в направлении расхождения колес против введенной боковой силы.
[0198] Фиг. 30(a) и 30(b) являются видами, показывающими подруливание за счет податливости под действием боковой силы и поперечную жесткость в устройстве 1B подвески согласно этому варианту осуществления и сравнительному примеру системы подвески работающего на сжатие типа, в которой элементы нижних тяг не пересекаются.
Как показано на фиг. 30, в случае конструкции устройства 1B подвески согласно этому варианту осуществления (сплошные линии на фиг. 30), подруливание за счет податливости под действием боковой силы повышается на 35%, а поперечная жесткость повышается на 29% по сравнению со сравнительным примером (пунктирные линии на фиг. 30).
[0199] В этом варианте осуществления, колеса 17FR, 17FL, 17RR и 17RL соответствуют колесу для шины, шине и механизму WH ступицы колеса. Поперечная тяга 137 соответствует элементу поперечной тяги в качестве первого элемента тяги, а работающая на сжатие тяга 138 соответствует элементу работающей на сжатие тяги в качестве второго элемента тяги.
[0200] Преимущества второго варианта осуществления
(1) Предусмотрен элемент поперечной тяги, соединяющий механизм WH ступицы колеса и колесо на нижней стороне от полуоси в направлении вверх и вниз транспортного средства и протягивающийся вдоль полуоси. Кроме того, предусмотрен элемент работающей на сжатие тяги. Соединительный участок элемента работающей на сжатие тяги с кузовом транспортного средства находится на задней стороне соединительного участка элемента поперечной тяги с кузовом транспортного средства в направлении вперед и назад транспортного средства, а соединительный участок элемента работающей на сжатие тяги с механизмом ступицы колеса находится на передней стороне соединительного участка элемента поперечной тяги с механизмом ступицы колеса в направлении вперед и назад транспортного средства.
[0201] В этой компоновке, можно сдвигать воображаемую нижнюю точку поворота в направлении внутрь к внутренней части кузова транспортного средства в направлении ширины транспортного средства, и, следовательно, снижать момент вокруг поворотного шкворня. Следовательно, эта компоновка тяг позволяет выполнять руление колесом за счет меньшей осевой силы зубчатой рейки и управлять направлением колеса за счет меньшей силы. Таким образом, в устройстве подвески транспортного средства, можно снижать осевую силу зубчатой рейки во время операции выполнения руления.
[0202] (2) Соединительный участок между элементом поперечной тяги и механизмом WH ступицы колеса находится на задней стороне от полуоси в направлении вперед и назад транспортного средства, а соединительный участок между элементом поперечной тяги и кузовом транспортного средства находится на передней стороне от полуоси в направлении вперед и назад транспортного средства.
Следовательно, в случае боковой силы, введенной в колесо по мере поворота внешнего колеса, соединительный участок между элементом поперечной тяги и механизмом WH ступицы колеса может сдвигаться в направлении внутрь, и, как следствие, характеристика расхождения колес может быть передана поворачивающему внешнему колесу.
[0203] (3) Соединительный участок между элементом поперечной тяги и кузовом транспортного средства находится на задней стороне соединительного участка между элементом работающей на сжатие тяги и механизмом ступицы колеса в направлении вперед и назад транспортного средства.
Следовательно, можно задавать или фиксировать направление вращения элемента поперечной тяги приблизительно параллельным полуоси, в одном направлении.
[0204] (4) Соединительный участок между элементом работающей на сжатие тяги и механизмом ступицы колеса находится на передней стороне от полуоси в направлении вперед и назад транспортного средства, а соединительный участок между элементом работающей на сжатие тяги и кузовом транспортного средства находится на задней стороне соединительного участка между элементом поперечной тяги и механизмом ступицы колеса в направлении вперед и назад транспортного средства.
Эта компоновка тяг позволяет увеличивать угол наклона элемента работающей на сжатие тяги относительно полуоси и сдвигать позицию воображаемой нижней точки поворота в направлении внутрь к внутренней части кузова транспортного средства.
[0205] (5) При виде сверху транспортного средства элементы поперечной и работающей на сжатие тяги, соединяющие кузов транспортного средства и колесо, размещаются посредством расположения элемента поперечной тяги вдоль полуоси и расположения элемента работающей на сжатие тяги таким образом, что элемент работающей на сжатие тяги пересекает элемент поперечной тяги, соединительный участок на стороне колеса элемента работающей на сжатие тяги находится на передней стороне элемента поперечной тяги, и соединительный участок на стороне кузова транспортного средства элемента работающей на сжатие тяги находится на задней стороне элемента поперечной тяги; и принудительного перемещения воображаемой нижней точки поворота, сформированной посредством точки пересечения между элементом поперечной тяги и элементом работающей на сжатие тяги, в направлении внутрь против боковой силы, действующей в направлении внутрь.
[0206] В этой компоновке, можно сдвигать воображаемую нижнюю точку поворота в направлении внутрь к внутренней части кузова транспортного средства в направлении ширины транспортного средства, и, следовательно, снижать момент вокруг поворотного шкворня. Следовательно, эта компоновка тяг позволяет выполнять руление колесом за счет меньшей осевой силы зубчатой рейки и управлять направлением колеса за счет меньшей силы. Таким образом, в устройстве подвески транспортного средства, можно снижать осевую силу зубчатой рейки во время операции выполнения руления.
[0207] (6) Ось поворотного шкворня, имеющая нижнюю точку поворота, заданную в точке пересечения элемента поперечной тяги и элемента работающей на растяжение тяги при виде сверху транспортного средства, проходит через поверхность контакта или пятно контакта шины и земли в состоянии, в котором рулевое колесо находится в нейтральной позиции.
Эта компоновка позволяет снижать момент вокруг оси поворотного шкворня, выполнять руление колесом за счет меньшей осевой силы зубчатой рейки и управлять направлением колеса за счет меньшей силы. Следовательно, можно улучшать стабильность и управляемость.
[0208] (7) Устройство подвески выполнено с возможностью подвешивать управляемое колесо, руление которым осуществляется посредством системы рулевого управления по проводам. Следовательно, посредством использования актуатора рулевого управления из системы рулевого управления по проводам, можно осуществлять управление в соответствии с заданием плеча стабилизации согласно этому варианту осуществления и повышать безопасность и управляемость.
Что касается преимуществ схемы управления/приведения в действие, второй вариант осуществления является идентичным первому варианту осуществления.
[0209] Третий вариант осуществления
Далее приводится пояснение в отношении третьего варианта осуществления настоящего изобретения.
Моторное транспортное средство 1 согласно третьему варианту осуществления по функции и конструкции является идентичным фиг. 1 в первом варианте осуществления. Моторное транспортное средство 1 согласно третьему варианту осуществления отличается по конструкции устройства 1B подвески от первого варианта осуществления.
Следовательно, нижеприведенное пояснение направлено на конструкцию устройства 1B подвески.
Фиг. 31 является видом в перспективе, схематично показывающим конструкцию устройства 1B подвески согласно третьему варианту осуществления. Фиг. 32 является видом в плане, схематично показывающим конструкцию устройства 1B подвески по фиг. 31. Фиг. 33(a) и фиг. 33(b) являются видом спереди в частичном сечении и видом сбоку в частичном сечении, схематично показывающими конструкцию устройства 1B подвески по фиг. 31. Фиг. 34(a) является видом в плане в частичном сечении (для левого переднего колеса), схематично показывающим конструкцию устройства 1B подвески по фиг. 25, и фиг. 34(b) является видом, показывающим пятно контакта шины и земли (для правого переднего колеса).
[0210] Как показано на фиг. 31-34, устройство подвески или система 1B подвески является устройством подвески работающего на растяжение типа, поддерживающим колеса 17FR и 17FL, присоединенные к механизмам WH ступиц колес, и включает в себя, на каждой из правой и левой сторон, стакан 33 полуоси, включающий в себя ось 32 или вал колеса (полуось), поддерживающую колесо 17FR или 17FL с возможностью вращения, множество элементов тяг, расположенных в направлении ширины кузова транспортного средства от поддерживающего участка на внутренней стороне или стороне кузова транспортного средства и соединенных со стаканом 33 полуоси, и пружинный элемент 34, такой как спиральная пружина.
[0211] Элементы тяг включают в себя поперечную тягу 237 (элемент поперечной тяги в качестве первого элемента тяги) и работающую на растяжение тягу 238 (элемент работающей на растяжение тяги в качестве второго элемента тяги), которые являются элементами нижних тяг, поперечную рулевую тягу 15 (элемент поперечной рулевой тяги) и стойку (пружинный элемент 34 и амортизатор 40). В этом варианте осуществления, устройство 1B подвески является системой подвески стоечного типа, и стойка ST, сформированная в качестве единого блока посредством пружинного элемента 34 и амортизатора 40, протягивается к верхнему концу, соединенному с поддерживающим участком на стороне кузова транспортного средства, расположенным выше полуоси 32 (в дальнейшем в этом документе, верхний конец стойки ST упоминается как "верхняя точка поворота" надлежащим образом).
[0212] Поперечная тяга 237 и работающая на растяжение тяга 238, формирующие нижние тяги, соединяют поддерживающий участок на стороне кузова транспортного средства, расположенный ниже полуоси 32, с нижним концом стакана 33 полуоси. В этом варианте осуществления, поперечная тяга 237 и работающая на растяжение тяга 238 имеют форму I-образного рычага, независимого друг от друга. Поперечная тяга 237 и работающая на растяжение тяга 238 соединяются с кузовом транспортного средства в двух соответствующих поддерживающих участках и соединяются со стороной полуоси 32 в двух соответствующих поддерживающих участках. Кроме того, поперечная тяга 237 и работающая на растяжение тяга 238 в этом варианте осуществления выполнены с возможностью соединять кузов 1A транспортного средства и сторону полуоси 32 (стакан 33 полуоси) друг с другом в пересекающемся или перекрещивающемся состоянии, в котором поперечная и работающая на растяжение тяги 237 и 238 пересекают друг друга (в дальнейшем в этом документе, точка пересечения между воображаемыми тягами, сформированная посредством поперечной тяги 237 и работающей на растяжение тяги 238, упоминается как "нижняя точка поворота" надлежащим образом).
[0213] Из этих нижних тяг, поперечная тяга 237 располагается таким образом, что поперечная тяга 237 является приблизительно параллельной полуоси. При виде сверху транспортного средства поддерживающая точка Ta на стороне колеса поперечной тяги 237 находится на передней стороне от центра колеса (полуоси) в направлении вперед и назад транспортного средства. Работающая на растяжение тяга 238 располагается таким образом, что работающая на растяжение тяга 238 наклоняется относительно полуоси больше поперечной тяги 237 (работающая на растяжение тяга 238 располагается таким образом, что поддерживающая точка на стороне колеса находится на задней стороне, а поддерживающая точка на стороне кузова транспортного средства находится на передней стороне). Поддерживающая точка Ca на стороне колеса работающей на растяжение тяги 238 находится на задней стороне от центра колеса в направлении вперед и назад транспортного средства. Поддерживающая точка Tb на стороне кузова транспортного средства поперечной тяги 237 находится на передней стороне от поддерживающей точки Ca на стороне колеса работающей на растяжение тяги 238 в направлении вперед и назад транспортного средства. Поддерживающая точка Cb на стороне кузова транспортного средства работающей на растяжение тяги 238 находится на передней стороне от поддерживающей точки Ta на стороне колеса поперечной тяги 237 в направлении вперед и назад транспортного средства.
[0214] В этой компоновке тяг, когда центробежная сила к внешней стороне по отношению к повороту кузова транспортного средства действует в центре O контакта шины и земли (точке приложения силы), как показано на фиг. 34(b), боковая или поперечная сила, действующая к центру поворота, против центробежной силы, может возникать, главным образом, за счет поперечной тяги 237. Кроме того, в этой компоновке тяг поддерживающая точка Tb на стороне кузова транспортного средства поперечной тяги 237 располагается на задней стороне от центра колеса в направлении вперед и назад транспортного средства. Следовательно, когда боковая сила (действующая в направлении внутрь к центру транспортного средства) вводится в колесо, поддерживающая точка Ta на стороне колеса поперечной тяги 237 перемещается в направлении внутрь к центру транспортного средства, и поддерживающая точка Ca на стороне колеса работающей на растяжение тяги 238 перемещается в направлении наружу к внешней стороне транспортного средства. Следовательно, эта компоновка тяг может реализовывать подруливание за счет податливости, чтобы направлять колесо в направлении схождения колес против введенной боковой силы.
[0215] Поперечная рулевая тяга 15 находится на нижней стороне от полуоси 32 и выполнена с возможностью соединять элемент 14 рулевой зубчатой рейки со стаканом 33 полуоси. Элемент 14 рулевой зубчатой рейки выполнен с возможностью передавать вращающую силу (силу поворота при выполнении руления), введенную из рулевого колеса 2, и тем самым формировать силу на валу или осевую силу для поворота или руления колесами. Следовательно, стакан 33 полуоси принимает осевую силу в направлении ширины транспортного средства из поперечной рулевой тяги 15 в соответствии с вращением рулевого колеса 2 и, вследствие этого, поворачивает либо выполняет руление колесом 17FR или 17FL.
[0216] В устройстве 1B подвески согласно этому варианту осуществления, как показано на фиг. 34(b), ось поворотного шкворня задается таким образом, что ось поворотного шкворня проходит через поверхность контакта или пятно контакта шины и земли в нейтральном состоянии, в котором рулевое колесо 2 находится в нейтральной позиции, и плечо стабилизации находится внутри поверхности или пятна контакта шины и земли. В частности, в устройстве 1B подвески по этому варианту осуществления, угол продольного наклона поворотного шкворня задается равным значению около нуля, и ось поворотного шкворня задается таким образом, что плечо стабилизации приближается к нулю. Это задание позволяет уменьшать крутильный крутящий момент шины во время операции выполнения руления, чтобы выполнять руление колесом, и уменьшать момент вокруг оси поворотного шкворня. Кроме того, радиус плеча обкатки колеса задается как положительное плечо обкатки колеса, при котором радиус плеча обкатки колеса превышает или равен нулю. При таком задании плечо стабилизации формируется с величиной, соответствующей радиусу плеча обкатки колеса относительно угла бокового скольжения на стороне шины во время операции выполнения руления, чтобы выполнять руление колесом, и, следовательно, система подвески может обеспечивать способность к прямолинейному движению или рабочие характеристики движения по прямой.
[0217] В этом варианте осуществления, поперечная тяга 237 и работающая на растяжение тяга 238, выступающие в качестве элементов нижних тяг, соединяют кузов 1 транспортного средства и сторону полуоси 32 (нижний конец стакана 33 полуоси) друг с другом в пересекающемся или перекрещивающемся состоянии, в котором поперечная тяга 237 и работающая на растяжение тяга 238 пересекают друг друга. Эта пересекающаяся компоновка позволяет задавать начальный (угол) поперечного наклона поворотного шкворня меньшим и задавать начальный радиус плеча обкатки колеса большим на стороне положительного плеча обкатки колеса по сравнению с непересекающейся компоновкой, в которой поперечная и работающая на растяжение тяги 237 и 238 не пересекают друг друга. Следовательно, система подвески может снижать крутильный крутящий момент шины во время операции выполнения руления и уменьшать осевую силу зубчатой рейки, требуемую для операции выполнения руления. Кроме того, согласно этому варианту осуществления, воображаемая нижняя точка поворота перемещается наружу или за пределы кузова транспортного средства за счет действия боковой силы, действующей на колесо во время операции выполнения руления, так что можно улучшать способность к прямолинейному движению.
[0218] Конкретные примеры конструкции
Фиг. 35 является схематичным видом, показывающим пример конструкции устройства 1B подвески с помощью устройства подвески работающего на растяжение типа.
Как показано на фиг. 35, в компоновке с двумя поворотными элементами, в которой элементы нижних тяг выполнены с возможностью пересекать друг друга в системе подвески работающего на растяжение типа, элементы нижних тяг обеспечивают такую операцию выполнения руления, чтобы направлять колесо по мере поворота внешнего колеса по внешней стороне по отношению к движению при повороте транспортного средства, посредством вращения вперед к передней части транспортного средства вокруг поддерживающих точек на стороне кузова транспортного средства (состояние, показанное посредством пунктирных линий). В этом случае, воображаемая нижняя точка поворота размещается в точке пересечения между элементами нижних тяг. Эта компоновка подвески позволяет задавать воображаемую нижнюю точку поворота в позиции на расположенной внутри стороне или внутренней стороне кузова транспортного средства по сравнению с непересекающейся компоновкой подвески, в которой элементы нижних тяг не пересекаются. Следовательно, эта компоновка подвески позволяет задавать начальный радиус плеча обкатки колеса большим в направлении положительного плеча обкатки колеса.
[0219] В системе подвески работающего на растяжение типа, показанной на фиг. 35, поскольку угол поворота работающего на растяжение стержня является большим при операции выполнения руления, воображаемая нижняя точка поворота сдвигается к внешней стороне. В этом случае, при виде сверху транспортного средства, с точки зрения, сфокусированной на расстоянии от центровой линии шины в направлении вперед и назад шины до воображаемой нижней точки поворота, воображаемая нижняя точка поворота перемещается в направлении наружу от центровой линии шины на внутренней стороне центровой линии шины, и, следовательно, радиус плеча обкатки колеса становится меньшим в рамках диапазона положительного плеча обкатки колеса. Следовательно, в системе подвески работающего на растяжение типа, когда применяется этот вариант осуществления, осевая сила зубчатой рейки увеличивается при операции выполнения руления по мере поворота внешнего колеса. Тем не менее, начальный радиус плеча обкатки колеса в состоянии без выполнения руления задается достаточно большим. Следовательно, осевая сила зубчатой рейки может задаваться меньшей по сравнению с непересекающейся системой подвески работающего на растяжение типа.
[0220] В случае непересекающейся системы подвески работающего на растяжение типа, в которой элементы нижних тяг не пересекаются, поскольку угол поворота работающего на растяжение стержня является большим при операции выполнения руления, воображаемая нижняя точка поворота сдвигается к внутренней стороне. В этом случае, при виде сверху транспортного средства расстояние от центровой линии шины в направлении вперед и назад шины до воображаемой нижней точки поворота находится на внутренней стороне центровой линии шины, и, следовательно, радиус плеча обкатки колеса становится больше в направлении к положительному плечу обкатки колеса. Следовательно, осевая сила зубчатой рейки снижается при операции выполнения руления. Тем не менее, поскольку воображаемая нижняя точка поворота находится на удлинении каждой тяги, радиус плеча обкатки колеса в начальном состоянии без операции выполнения руления является небольшим, и непросто снижать в значительной степени осевую силу зубчатой рейки.
[0221] Кроме того, в примере, показанном на фиг. 35, при виде сверху транспортного средства, центр колеса перемещается к внешней стороне движения при повороте транспортного средства во время операции выполнения руления. Следовательно, система подвески может обеспечивать дополнительное преимущество от уменьшения осевой силы зубчатой рейки за счет компоновки с размещением вала 14 зубчатой рейки на задней стороне от полуоси, аналогично этому варианту осуществления.
В примерах второго и третьего вариантов осуществления настоящее изобретение применяется к устройству подвески, имеющему компоновку тяг работающего на сжатие типа или работающего на растяжение типа. Тем не менее, настоящее изобретение является применимым к устройству подвески другого типа.
[0222] В этом варианте осуществления, колеса 17FR, 17FL, 17RR и 17RL соответствуют колесу для шины, шине и механизму WH ступицы колеса. Поперечная тяга 237 соответствует элементу поперечной тяги в качестве первого элемента тяги, а работающая на растяжение тяга 238 соответствует элементу работающей на растяжение тяги в качестве второго элемента тяги.
[0223] Преимущества третьего варианта осуществления
(1) Предусмотрен элемент поперечной тяги, соединяющий механизм WH ступицы колеса и колесо на нижней стороне от полуоси в направлении вверх и вниз транспортного средства и протягивающийся вдоль полуоси. Кроме того, предусмотрен элемент работающей на растяжение тяги. Соединительный участок элемента работающей на растяжение тяги с кузовом транспортного средства находится на передней стороне соединительного участка элемента поперечной тяги с кузовом транспортного средства в направлении вперед и назад транспортного средства, а соединительный участок элемента работающей на растяжение тяги с механизмом ступицы колеса находится на задней стороне соединительного участка элемента поперечной тяги с механизмом ступицы колеса в направлении вперед и назад транспортного средства.
[0224] В этой компоновке, можно сдвигать начальную позицию воображаемой нижней точки поворота в направлении внутрь к внутренней части кузова транспортного средства в направлении ширины транспортного средства, и, следовательно, снижать момент вокруг поворотного шкворня. Следовательно, эта компоновка тяг позволяет выполнять руление колесом за счет меньшей осевой силы зубчатой рейки и управлять направлением колеса за счет меньшей силы. Таким образом, в устройстве подвески транспортного средства, можно снижать осевую силу зубчатой рейки во время операции выполнения руления.
[0225] (2) Соединительный участок между элементом поперечной тяги и механизмом WH ступицы колеса находится на передней стороне от полуоси в направлении вперед и назад транспортного средства, а соединительный участок между элементом поперечной тяги и кузовом транспортного средства находится на задней стороне от полуоси в направлении вперед и назад транспортного средства.
Следовательно, в случае боковой силы, введенной в колесо по мере поворота внешнего колеса, соединительный участок между элементом поперечной тяги и механизмом WH ступицы колеса может сдвигаться в направлении внутрь, и, как следствие, характеристика схождения колес может быть передана поворачивающему внешнему колесу.
[0226] (3) Соединительный участок между элементом поперечной тяги и кузовом транспортного средства находится на передней стороне соединительного участка между элементом работающей на растяжение тяги и механизмом ступицы колеса в направлении вперед и назад транспортного средства.
Следовательно, можно задавать или фиксировать направление вращения элемента поперечной тяги приблизительно параллельным полуоси, в одном направлении.
(4) Соединительный участок между элементом работающей на растяжение тяги и механизмом ступицы колеса находится на задней стороне от полуоси в направлении вперед и назад транспортного средства, а соединительный участок между элементом работающей на растяжение тяги и кузовом транспортного средства находится на передней стороне соединительного участка между элементом поперечной тяги и механизмом ступицы колеса в направлении вперед и назад транспортного средства.
Эта компоновка тяг позволяет увеличивать угол наклона элемента работающей на растяжение тяги относительно полуоси и сдвигать позицию воображаемой нижней точки поворота в направлении внутрь к внутренней части кузова транспортного средства.
[0227] (5) При виде сверху транспортного средства элементы поперечной и работающей на растяжение тяги, соединяющие кузов транспортного средства и колесо, размещаются посредством расположения элемента поперечной тяги вдоль полуоси и расположения элемента работающей на растяжение тяги таким образом, что элемент работающей на растяжение тяги пересекает элемент поперечной тяги, соединительный участок на стороне колеса элемента работающей на растяжение тяги находится на задней стороне элемента поперечной тяги, и соединительный участок на стороне кузова транспортного средства элемента работающей на растяжение тяги находится на передней стороне элемента поперечной тяги; и принудительного перемещения воображаемой нижней точки поворота, сформированной посредством точки пересечения между элементом поперечной тяги и элементом работающей на растяжение тяги, в направлении наружу против боковой силы, действующей в направлении внутрь.
[0228] В этой компоновке, можно задавать начальную позицию воображаемой нижней точки поворота на внутренней стороне к внутренней части кузова транспортного средства в направлении ширины транспортного средства, и, следовательно, снижать момент вокруг поворотного шкворня. Следовательно, эта компоновка тяг позволяет выполнять руление колесом за счет меньшей осевой силы зубчатой рейки и управлять направлением колеса за счет меньшей силы. Таким образом, в устройстве подвески транспортного средства, можно осевую силу зубчатой рейки во время операции выполнения руления.
[0229] (6) Ось поворотного шкворня, имеющая нижнюю точку поворота, заданную в точке пересечения элемента поперечной тяги и элемента работающей на растяжение тяги при виде сверху транспортного средства, проходит через поверхность контакта или пятно контакта шины и земли в состоянии, в котором рулевое колесо находится в нейтральной позиции.
Эта компоновка позволяет снижать момент вокруг оси поворотного шкворня, выполнять руление колесом за счет меньшей осевой силы зубчатой рейки и управлять направлением колеса за счет меньшей силы. Следовательно, можно улучшать стабильность и управляемость.
[0230] (7) Устройство подвески выполнено с возможностью подвешивать управляемое колесо, руление которым осуществляется посредством системы рулевого управления по проводам. Следовательно, посредством использования актуатора рулевого управления из системы рулевого управления по проводам, можно осуществлять управление в соответствии с заданием плеча стабилизации согласно этому варианту осуществления и повышать безопасность и управляемость.
[0231] Пример 1 варианта применения
Хотя второй и третий варианты осуществления поясняются посредством использования примеров, в которых устройство 1B подвески применяется к системе подвески для управляемых передних колес, устройство 1B подвески также является применимым к системе подвески для неуправляемых задних колес.
[0232] В этом случае, когда транспортное средство переходит вследствие операции выполнения руления в состояние поворачивания, и боковая сила прикладывается к заднему колесу, работающая на растяжение тяга и работающая на сжатие тяга изгибаются за счет действия боковой силы, точка пересечения этих тяг при виде сверху транспортного средства перемещается, и направление колеса изменяется относительно кузова транспортного средства (см. фиг. 29 и фиг. 35). А именно, элемент нижней тяги, протягивающийся вдоль полуоси, имеет небольшую величину перемещения в направлении вперед и назад за счет действия боковой силы, и другой элемент нижней тяги, расположенный под углом относительно полуоси, так что возникает угол в направлении вперед и назад, имеет большую величину перемещения в направлении вперед и назад за счет действия боковой силы.
Посредством использования этой характеристики, можно реализовывать намеченное подруливание за счет податливости.
В частности, устройство подвески работающего на растяжение типа 1B согласно второму варианту осуществления может реализовывать характеристику, направляющую колесо на внешней стороне по отношению к повороту к направлению схождения колес, так что этот устройство подвески является эффективным при использовании для задней подвески.
[0233] Преимущество
Первый и второй элементы тяг для соединения механизма ступицы колеса и кузова транспортного средства выполнены с возможностью пересекать друг друга при виде сверху транспортного средства на нижней стороне от полуоси в направлении вверх и вниз транспортного средства.
Следовательно, элементы тяг изгибаются за счет действия боковой силы во время поворота, точка пересечения элементов тяг при виде сверху транспортного средства сдвигается, и, как следствие, направление колеса может быть изменено относительно кузова транспортного средства. Следовательно, можно реализовывать намеченное подруливание за счет податливости.
[0234] Пример 2 варианта применения
Хотя второй и третий варианты осуществления поясняются посредством использования примеров, в которых устройство 1B подвески применяется к системе подвески для управляемых передних колес, устройство 1B подвески также является применимым к системе подвески для управляемых задних колес.
Кроме того, в этом случае воображаемая нижняя точка поворота может сдвигаться к внутренней стороне транспортного средства в направлении ширины или в поперечном направлении транспортного средства, аналогично первому варианту осуществления. Кроме того, ось поворотного шкворня, заданная посредством этой воображаемой нижней точки поворота, задается таким образом, что плечо стабилизации находится в пределах поверхности или пятна контакта шины и земли. Следовательно, можно снижать момент вокруг оси поворотного шкворня. Следовательно, можно выполнять руление колесами за счет меньшей осевой силы зубчатой рейки, управлять направлением колес за счет меньшей силы и, вследствие этого, улучшать управляемость и стабильность.
[0235] Пример 3 варианта применения
Во втором и третьем вариантах осуществления плечо стабилизации задается в пределах поверхности контакта шины и земли, и в качестве примера, плечо стабилизации задается равным значению около нуля.
В отличие от этого задания, в этом примере варианта применения, состояние задания плеча стабилизации ограничивается диапазоном от центра пятна контакта шины и земли до переднего края пятна контакта шины и земли.
Преимущество
В случае компоновки задания плеча стабилизации в диапазоне от центра пятна контакта шины и земли до переднего края пятна контакта шины и земли, можно достигать обеспечения способности к прямолинейному движению и уменьшения тяжести операции руления одновременно и, вследствие этого, улучшать управляемость и безопасность.
[0236] Пример 4 варианта применения
Во втором и третьем вариантах осуществления, область, окруженная посредством штрихпунктирной линии с одной точкой в координатной плоскости, показанной на фиг. 7, выбирается в качестве примера области, достаточной для задания. В отличие от этого, можно задавать, в качестве соответствующей области задания, внутреннюю область (в направлении понижения поперечного наклона поворотного шкворня и направлении увеличения радиуса плеча обкатки колеса) в диапазоне, представленном посредством граничной линии, определенной посредством изоплетической линии, которая используется в качестве граничной линии и которая является линией равного значения осевой силы зубчатой рейки, на которую обращается внимание.
Преимущество
Можно допускать наибольшее значение осевой силы зубчатой рейки и задавать геометрию подвески в рамках диапазона, меньшего или равного наибольшему значению осевой силы зубчатой рейки.
[0237] Пример 5 варианта применения
В примерах второго и третьего вариантов осуществления и примерах вариантов применения, устройство 1B подвески применяется к транспортному средству, оснащенному устройством рулевого управления на основе рулевого управления по проводам. Тем не менее, можно применять устройство 1B подвески к транспортному средству, оснащенному устройством рулевого управления на основе электроусилителя рулевого колеса либо другим устройством рулевого управления с механическим рулевым управлением или с рулевым приводом.
В этом случае, ось поворотного шкворня определяется в соответствии с состоянием согласно вышеуказанным результатам анализа, плечо стабилизации задается в пределах поверхности контакта шины и земли, и тяги механизма на основе механического рулевого управления размещаются в соответствии с этими настройками.
Преимущество
Даже в механизме на основе механического рулевого управления, можно снижать момент вокруг поворотного шкворня, вследствие этого, снижать требуемую силу поворота при выполнении руления или усилие для поворота при выполнении руления водителя и улучшать стабильность и управляемость.
[0238] Пример 6 варианта применения
В примерах второго и третьего вариантов осуществления и примерах вариантов применения, настоящее изобретение применяется к устройству подвески стоечного типа в качестве примера. Тем не менее, можно применять настоящее изобретение к устройству подвески, имеющему верхний рычаг. В этом случае, верхняя точка поворота является точкой соединения между верхним рычагом и стаканом полуоси.
[0239] Четвертый вариант осуществления
Далее приводится пояснение в отношении четвертого варианта осуществления настоящего изобретения.
Моторное транспортное средство 1 согласно четвертому варианту осуществления по функции и конструкции является идентичным фиг. 1 в первом варианте осуществления. Моторное транспортное средство 1 согласно четвертому варианту осуществления отличается по конструкции устройства 1B подвески от первого варианта осуществления.
Следовательно, нижеприведенное пояснение направлено на конструкцию устройства 1B подвески.
Фиг. 36 является видом в перспективе, схематично показывающим конструкцию устройства 1B подвески согласно четвертому варианту осуществления. Фиг. 37 является видом в плане, схематично показывающим конструкцию устройства 1B подвески по фиг. 36. Фиг. 38(a) и 38(b) являются видом спереди в частичном сечении и видом сбоку в частичном сечении, схематично показывающими конструкцию устройства 1B подвески по фиг. 36. Фиг. 39(a) является видом в плане в частичном сечении (для левого переднего колеса), схематично показывающим конструкцию устройства 1B подвески по фиг. 36 и фиг. 39(b) является видом, показывающим пятно контакта шины и земли (для правого переднего колеса).
[0240] Как показано на фиг. 36-39, устройство подвески или система 1B подвески является устройством подвески работающего на сжатие типа, поддерживающим колеса 17FR и 17FL, присоединенные к механизмам WH ступиц колес, и включает в себя, на каждой из правой и левой сторон, стакан 33 полуоси, включающий в себя ось 32 или вал колеса (полуось), поддерживающую колесо 17FR или 17FL с возможностью вращения, множество элементов тяг, расположенных в направлении ширины кузова транспортного средства от поддерживающего участка на внутренней стороне или стороне кузова транспортного средства и соединенных со стаканом 33 полуоси, и пружинный элемент 34, такой как спиральная пружина.
[0241] Элементы тяг включают в себя поперечную тягу 337 (элемент поперечной тяги в качестве первого элемента тяги) и работающую на сжатие тягу 338 (элемент работающей на сжатие тяги в качестве второго элемента тяги), которые являются элементами нижних тяг, поперечную рулевую тягу 15 (элемент поперечной рулевой тяги) и стойку (пружинный элемент 34 и амортизатор 40). В этом варианте осуществления, устройство 1B подвески является системой подвески стоечного типа, и стойка ST, сформированная в качестве единого блока посредством пружинного элемента 34 и амортизатора 40, протягивается к верхнему концу, соединенному с поддерживающим участком на стороне кузова транспортного средства, расположенным выше полуоси 32 (в дальнейшем в этом документе, верхний конец стойки ST упоминается как "верхняя точка поворота" надлежащим образом).
[0242] Поперечная тяга 337 и работающая на сжатие тяга 338, формирующие нижние тяги, соединяют поддерживающий участок на стороне кузова транспортного средства, расположенный ниже полуоси 32, с нижним концом стакана 33 полуоси. В этом варианте осуществления, поперечная тяга 337 и работающая на сжатие тяга 338 имеют форму I-образного рычага, независимого друг от друга. Поперечная тяга 337 и работающая на сжатие тяга 338 соединяются с кузовом транспортного средства в двух соответствующих поддерживающих участках и соединяются со стороной полуоси 32 в двух соответствующих поддерживающих участках. Кроме того, поперечная тяга 337 и работающая на сжатие тяга 338 в этом варианте осуществления выполнены с возможностью соединять кузов 1A транспортного средства и сторону полуоси 32 (стакан 33 полуоси) друг с другом в пересекающемся или перекрещивающемся состоянии, в котором поперечная и работающая на сжатие тяги 337 и 338 пересекают друг друга (в дальнейшем в этом документе, точка пересечения между воображаемыми тягами, сформированная посредством поперечной тяги 337 и работающей на сжатие тяги 338, упоминается как "нижняя точка поворота" надлежащим образом).
[0243] Из этих нижних тяг, поперечная тяга 337 располагается таким образом, что поперечная тяга 337 является приблизительно параллельной полуоси. При виде сверху транспортного средства поддерживающая точка Ta на стороне колеса поперечной тяги 337 находится на задней стороне от центра колеса (полуоси) в направлении вперед и назад транспортного средства. Работающая на сжатие тяга 338 располагается таким образом, что работающая на сжатие тяга 338 наклоняется относительно полуоси больше поперечной тяги 337 (работающая на сжатие тяга 338 ориентируется таким образом, что поддерживающая точка на стороне колеса находится на передней стороне, а поддерживающая точка на стороне кузова транспортного средства находится на задней стороне). Поддерживающая точка Ca на стороне колеса работающей на сжатие тяги 338 находится на передней стороне от центра колеса в направлении вперед и назад транспортного средства. Поддерживающая точка Tb на стороне кузова транспортного средства поперечной тяги 337 находится на задней стороне от поддерживающей точки Ca на стороне колеса работающей на сжатие тяги 338 в направлении вперед и назад транспортного средства. Поддерживающая точка Cb на стороне кузова транспортного средства работающей на сжатие тяги 338 находится на задней стороне от поддерживающей точки Ta на стороне колеса поперечной тяги 337 в направлении вперед и назад транспортного средства.
[0244] В этой компоновке тяг, когда центробежная сила к внешней стороне по отношению к повороту кузова транспортного средства действует в центре O контакта шины и земли (точке приложения силы), как показано на фиг. 39(b), боковая сила, действующая к центру поворота, против центробежной силы, может возникать, главным образом, за счет поперечной тяги 337. Кроме того, в этой компоновке тяг поддерживающая точка Tb на стороне кузова транспортного средства поперечной тяги 337 располагается на передней стороне от центра колеса в направлении вперед и назад транспортного средства. Следовательно, когда боковая сила (действующая в направлении внутрь к центру транспортного средства) вводится в колесо, поддерживающая точка Ta на стороне колеса поперечной тяги 337 перемещается в направлении внутрь к центру транспортного средства, и поддерживающая точка Ca на стороне колеса работающей на сжатие тяги 338 перемещается в направлении наружу к внешней стороне транспортного средства. Следовательно, эта компоновка тяг может реализовывать подруливание за счет податливости, чтобы направлять колесо в направлении расхождения колес против введенной боковой силы. Таким образом, эта компоновка тяг может обеспечивать подруливание за счет податливости в поперечном направлении транспортного средства.
[0245] Поперечная рулевая тяга 15 находится на нижней стороне от полуоси 32 и выполнена с возможностью соединять вал 14 зубчатой рейки со стаканом 33 полуоси. Вал 14 зубчатой рейки выполнен с возможностью передавать вращающую силу (силу поворота при выполнении руления), введенную из рулевого колеса 2, и тем самым формировать силу на валу или осевую силу для поворота или руления колесами. Следовательно, стакан 33 полуоси принимает осевую силу в направлении ширины транспортного средства из поперечной рулевой тяги 15 в соответствии с вращением рулевого колеса 2 и, вследствие этого, поворачивает либо выполняет руление колесом 17FR или 17FL.
[0246] В устройстве подвески согласно этому варианту осуществления, при виде сверху транспортного средства, показанному на фиг. 39(a), поддерживающая точка Xa на стороне колеса (стороне стакана 33 полуоси) поперечной рулевой тяги 15 находится на внешней стороне, в направлении ширины транспортного средства, поддерживающих точек Ta и Ca на стороне колеса поперечной тяги 337 и работающей на сжатие тяги 338. Кроме того, поддерживающая точка Xb на стороне кузова транспортного средства (позиция шарового шарнира) поперечной рулевой тяги 15 находится на передней стороне от поддерживающей точки Xa на стороне колеса в направлении вперед и назад транспортного средства.
[0247] Как упомянуто выше, поддерживающая точка Ca на стороне колеса работающей на сжатие тяги 338 находится на передней стороне от центра колеса в направлении вперед и назад транспортного средства, и поддерживающая точка Ta на стороне колеса поперечной тяги 337 находится на задней стороне от центра колеса в направлении вперед и назад транспортного средства. Поддерживающая точка Tb на стороне кузова транспортного средства поперечной тяги 337 находится на задней стороне от поддерживающей точки Ca на стороне колеса работающей на сжатие тяги 338 в направлении вперед и назад транспортного средства. Поддерживающая точка Cb на стороне кузова транспортного средства работающей на сжатие тяги 338 находится на задней стороне от поддерживающей точки Ta на стороне колеса поперечной тяги 337 в направлении вперед и назад транспортного средства.
[0248] В этой компоновке тяг, в случае, в котором сила в направлении вперед и назад транспортного средства или в продольном направлении является доминирующей (к примеру, при операции торможения при повороте с относительно резким торможением) против продольной силы в направлении вперед и назад транспортного средства (силы, направленной назад к задней части транспортного средства), введенной в точку контакта шины и земли, поддерживающая точка Xa на стороне колеса поперечной рулевой тяги 15 поворачивается вокруг поддерживающей точки Xb на стороне кузова транспортного средства и перемещается в направлении наружу к внешней стороне транспортного средства. Кроме того, поддерживающая точка Ca на стороне колеса работающей на сжатие тяги 338 перемещается в направлении наружу. Поддерживающая точка Ta на стороне колеса поперечной тяги 337 перемещается в направлении внутрь. Следовательно, эта компоновка тяг может реализовывать подруливание за счет податливости, чтобы направлять колесо в направлении расхождения колес и обеспечивать подруливание за счет продольной податливости в направлении вперед и назад транспортного средства.
[0249] В устройстве 1B подвески согласно этому варианту осуществления, как показано на фиг. 39(b), ось KS поворотного шкворня задается таким образом, что ось поворотного шкворня проходит через поверхность контакта или пятно контакта шины и земли в нейтральном состоянии, в котором рулевое колесо 2 находится в нейтральной позиции, и плечо стабилизации находится внутри поверхности или пятна контакта шины и земли. В частности, в устройстве 1B подвески по этому варианту осуществления, угол продольного наклона поворотного шкворня задается равным значению около нуля, и ось поворотного шкворня задается таким образом, что плечо стабилизации приближается к нулю. Это задание позволяет уменьшать крутильный крутящий момент шины во время операции выполнения руления и уменьшать момент вокруг оси поворотного шкворня. Кроме того, радиус плеча обкатки колеса задается равным значению положительного плеча обкатки колеса, большему или равному нулю. При таком задании плечо стабилизации формируется с величиной, соответствующей радиусу плеча обкатки колеса относительно угла бокового скольжения на стороне шины во время операции выполнения руления, чтобы выполнять руление колесом, и, следовательно, система подвески может обеспечивать способность к прямолинейному движению или рабочие характеристики движения по прямой.
[0250] В этом варианте осуществления, поперечная тяга 337 и работающая на сжатие тяга 338, выступающие в качестве элементов нижних тяг, соединяют кузов 1 транспортного средства и сторону полуоси 32 (нижний конец стакана 33 полуоси) друг с другом в пересекающемся или перекрещивающемся состоянии, в котором поперечная тяга 337 и работающая на сжатие тяга 338 пересекают друг друга. Эта пересекающаяся компоновка позволяет задавать (угол) поперечного наклона поворотного шкворня меньшим и задавать радиус плеча обкатки колеса большим на стороне положительного плеча обкатки колеса по сравнению с непересекающейся компоновкой, в которой поперечная и работающая на сжатие тяги 337 и 338 не пересекают друг друга. Следовательно, система подвески может снижать крутильный крутящий момент шины во время операции выполнения руления и уменьшать осевую силу зубчатой рейки, требуемую для операции выполнения руления. Кроме того, согласно этому варианту осуществления, воображаемая нижняя точка поворота перемещается к внутренней стороне кузова транспортного средства за счет действия боковой силы, действующей на колесо во время операции выполнения руления, так что можно улучшать способность к прямолинейному движению вследствие стабилизирующего крутящего момента (SAT).
[0251] В дальнейшем в этом документе подробно анализируется геометрия подвески в устройстве 1B подвески.
Анализ компонента осевой силы зубчатой рейки
Что касается взаимосвязи между ходом зубчатой рейки и осевой силой зубчатой рейки во время операции выполнения руления, как показано на фиг. 5, осевая сила зубчатой рейки содержит, главным образом, крутильный крутящий момент шины и крутящий момент при подъеме колеса. Из этих компонентов осевой силы зубчатой рейки, крутильный крутящий момент шины является преобладающим.
Следовательно, можно уменьшать осевую силу зубчатой рейки посредством снижения крутильного крутящего момента шины.
[0252] Минимизация крутильного крутящего момента шины
Траектория или след центра поверхности контакта или пятна контакта шины и земли во время операции выполнения руления являются идентичными траектории или следу, показанным на фиг. 6. Фиг. 6 показывает характеристику в случае, если перемещение центра поверхности контакта шины и земли или центра пятна контакта шины и земли является большим при операции выполнения руления, и характеристику в случае, если перемещение центра поверхности контакта шины и земли является небольшим при операции выполнения руления.
Как видно из вышеуказанного результата компонентов осевой силы зубчатой рейки, эффективно минимизировать крутильный крутящий момент шины во время операции выполнения руления с тем, чтобы уменьшать осевую силу зубчатой рейки. Чтобы минимизировать крутильный крутящий момент шины при операции выполнения руления, уместно уменьшать траекторию центра поверхности контакта шины и земли, как показано на фиг. 6. А именно, можно минимизировать крутильный крутящий момент шины посредством задания центра поверхности контакта шины и земли и точки контакта или пересечения поворотного шкворня и земли в согласованной или в идентичной позиции. Конкретно, эффективно задавать плечо стабилизации равным 0 мм и радиус плеча обкатки колеса равным или превышающим 0 мм.
[0253] Влияние поперечного наклона поворотного шкворня
В качестве одного примера распределения осевой силы зубчатой рейки в системе координат с использованием, в качестве осей, поперечного наклона поворотного шкворня и радиуса плеча обкатки колеса, изолинейная или изоплетическая схема по фиг. 7 показывает три изоплетических линии или линии равного значения для небольших, средних и больших значений осевой силы зубчатой рейки. Относительно ввода крутильного крутящего момента шины, по мере того, как поперечный наклон поворотного шкворня становится больше, его момент вращения становится больше, и осевая сила зубчатой рейки становится больше. Соответственно, желательно задавать поперечный наклон поворотного шкворня меньшим предварительно определенного значения. Тем не менее, из взаимосвязи с радиусом плеча обкатки колеса, можно снижать осевую силу зубчатой рейки до требуемого уровня посредством задания поперечного наклона поворотного шкворня, например, меньшим или равным 15 градусов.
[0254] Область, окруженная посредством штрихпунктирных линий с одной точкой (граничных линий) на фиг. 7, является областью, в которой поперечный наклон поворотного шкворня меньше угла в 15 градусов, что представляет собой значение, оцененное как значение, при котором боковая сила превышает предел трения, и в то же время радиус плеча обкатки колеса превышает или равен 0 мм с вышеуказанной точки зрения крутильного крутящего момента шины. В этом варианте осуществления, эта область (в направлении снижения поперечного наклона поворотного шкворня от 15 градусов по горизонтальной оси и в направлении повышения радиуса плеча обкатки колеса от нуля по вертикальной оси) трактуется в качестве области, более подходящей для задания. Тем не менее, даже в области, в которой радиус плеча обкатки колеса является отрицательным, можно получать определенное преимущество посредством показа другого состояния в этом варианте осуществления.
[0255] Конкретно, при определении радиуса плеча обкатки колеса и поперечного наклона поворотного шкворня, например, можно аппроксимировать изоплетическую линию или линию равного значения, представляющую распределение осевой силы зубчатой рейки, с помощью кривой под n градусов (n является целым числом, большим или равным 2) и использовать значение, определенное в соответствии с позицией точки изгиба кривой под n градусов (или пикового значения) в области, окруженной посредством штрихпунктирных линий с одной точкой.
[0256] Конкретные примеры конструкции
Фиг. 40 является схематичным видом, показывающим пример конструкции устройства 1B подвески с помощью устройства подвески работающего на сжатие типа. В примере, показанном на фиг. 40, при виде сверху транспортного средства, поперечная тяга 337 (работающий на растяжение стержень) протягивается вдоль полуоси, а работающая на сжатие тяга 338 (работающий на сжатие стержень) протягивается назад от полуоси и соединяется с кузовом транспортного средства в позиции на задней стороне от полуоси.
[0257] Как показано на фиг. 40, в компоновке с двумя поворотными элементами, в которой элементы нижних тяг выполнены с возможностью пересекать друг друга в системе подвески работающего на сжатие типа, элементы нижних тяг обеспечивают такую операцию выполнения руления, чтобы направлять колесо по мере поворота внешнего колеса по внешней стороне по отношению к движению при повороте транспортного средства, посредством вращения вперед к передней части транспортного средства вокруг поддерживающих точек на стороне кузова транспортного средства (состояние, показанное посредством пунктирных линий). В этом случае, воображаемая нижняя точка поворота размещается в точке пересечения между элементами нижних тяг. Эта компоновка подвески позволяет задавать воображаемую нижнюю точку поворота в позиции на расположенной внутри стороне или внутренней стороне кузова транспортного средства по сравнению с непересекающейся компоновкой подвески, в которой элементы нижних тяг не пересекаются. Следовательно, эта компоновка подвески позволяет задавать начальный радиус плеча обкатки колеса большим в направлении положительного плеча обкатки колеса.
[0258] В системе подвески работающего на сжатие типа, показанной на фиг. 40, поскольку угол поворота работающего на сжатие стержня является большим при операции выполнения руления, воображаемая нижняя точка поворота сдвигается к внутренней стороне. В этом случае, при виде сверху транспортного средства, с точки зрения, сфокусированной на расстоянии от центровой линии шины в направлении вперед и назад шины до воображаемой нижней точки поворота, воображаемая нижняя точка поворота перемещается в направлении внутрь от центровой линии шины на внутренней стороне центровой линии шины, и, следовательно, радиус плеча обкатки колеса становится больше в рамках диапазона положительного плеча обкатки колеса. Следовательно, в системе подвески работающего на сжатие типа, когда применяется этот вариант осуществления, осевая сила зубчатой рейки снижается при операции выполнения руления по мере поворота внешнего колеса.
[0259] В случае непересекающейся системы подвески работающего на сжатие типа, в которой элементы нижних тяг не пересекаются, поскольку угол поворота работающего на сжатие стержня является большим при операции выполнения руления, воображаемая нижняя точка поворота сдвигается к внешней стороне. В этом случае, при виде сверху транспортного средства расстояние от центровой линии шины в направлении вперед и назад шины до воображаемой нижней точки поворота находится на внешней стороне центровой линии шины, и, следовательно, радиус плеча обкатки колеса становится больше в направлении к отрицательному плечу обкатки колеса. Следовательно, осевая сила зубчатой рейки увеличивается при операции выполнения руления.
[0260] Кроме того, в примере, показанном на фиг. 40, при виде сверху транспортного средства, центр колеса перемещается к внутренней стороне движения при повороте транспортного средства во время операции выполнения руления. Следовательно, система подвески может обеспечивать дополнительное преимущество от уменьшения осевой силы зубчатой рейки за счет компоновки с размещением вала 14 зубчатой рейки на передней стороне от полуоси, аналогично этому варианту осуществления.
Взаимосвязь между углом схождения-расхождения колес и радиусом плеча обкатки колеса в системе подвески работающего на сжатие типа, включающей в себя элементы нижних тяг в непересекающейся компоновке и систему подвески согласно этому варианту осуществления, показана на фиг. 9.
[0261] Как показано на фиг. 9, по сравнению с непересекающейся компоновкой элементов нижних тяг, компоновка согласно этому варианту осуществления может дополнительно увеличивать радиус плеча обкатки колеса около нейтральной позиции (в которой угол схождения-расхождения колес является нулевым). Кроме того, в направлении увеличения угла поворота при выполнении руления в поворачивающем внешнем колесе (в направлении "-" на фиг. 9), радиус плеча обкатки колеса увеличивается, и можно снижать осевую силу зубчатой рейки.
[0262] Способность к прямолинейному движению при положительном плече обкатки колеса
Что касается стабилизирующего крутящего момента при задании положительного плеча обкатки колеса, как показано на фиг. 11, восстанавливающая сила (стабилизирующий крутящий момент), действующая на шину, увеличивается пропорционально сумме плеча стабилизации и увода пневматической шины.
В случае положительного плеча обкатки колеса, можно рассматривать, в качестве плеча стабилизации, расстояние εc (см. фиг. 11) от центра колеса, определенное посредством позиции опоры перпендикулярной линии, проведенной от точки контакта с землей оси поворотного шкворня, до прямой линии, протягивающейся через центр контакта шины и земли в направлении угла β бокового скольжения на стороне шины.
Следовательно, восстанавливающая сила, действующая на шину во время операции выполнения руления, становится больше по мере того, как становится больше радиус плеча обкатки колеса для положительного плеча обкатки колеса.
[0263] В этом варианте осуществления, ось поворотного шкворня задается в компоновке положительного плеча обкатки колеса, и можно обеспечивать начальный радиус плеча обкатки колеса на большом уровне по сравнению с компоновкой непересекающихся элементов нижних тяг. Следовательно, система подвески по этому варианту осуществления может уменьшать влияние на способность к прямолинейному движению посредством задания угла продольного наклона поворотного шкворня более близким к нулю. Кроме того, посредством использования режима рулевого управления по проводам, система подвески может в итоге обеспечивать намеченную способность к прямолинейному движению с помощью актуатора 8 рулевого управления.
[0264] Работа
Далее приводится пояснение в отношении работы устройства 1B подвески согласно этому варианту осуществления.
В устройстве 1B подвески согласно этому варианту осуществления два элемента нижних тяг имеют форму I-образного рычага. Поперечная тяга 337 выполнена с возможностью идти в направлении ширины транспортного средства от стакана 33 полуоси, а работающая на сжатие тяга 338 выполнена с возможностью идти под углом к задней части транспортного средства от нижнего конца стакана 33 полуоси в пересекающемся состоянии с пересечением поперечной тяги 337. В частности, поддерживающая точка Ta на стороне колеса поперечной тяги 337 находится на задней стороне от центра колеса в направлении вперед и назад транспортного средства. Поддерживающая точка Ca на стороне колеса работающей на сжатие тяги 338 находится на передней стороне от центра колеса в направлении вперед и назад транспортного средства. Поддерживающая точка Tb на стороне кузова транспортного средства поперечной тяги 337 находится на задней стороне от поддерживающей точки Ca на стороне колеса работающей на сжатие тяги 338 в направлении вперед и назад транспортного средства. Поддерживающая точка Cb на стороне кузова транспортного средства работающей на сжатие тяги 338 находится на задней стороне от поддерживающей точки Ta на стороне колеса поперечной тяги 337 в направлении вперед и назад транспортного средства.
[0265] В этой компоновке подвески боковая или поперечная сила, введенная в колесо во время операции выполнения руления и т.п., может возникать, по большей части, за счет поперечной тяги 337. Кроме того, в случае ввода боковой силы в направлении внутрь к центру транспортного средства в колесо на внешней стороне по отношению к повороту, поперечная тяга 337 вращается к внутренней стороне, а работающая на сжатие тяга 338 вращается к внешней стороне. Следовательно, эта компоновка тяг может предоставлять характеристику расхождения колес для колеса.
[0266] В устройстве 1B подвески, при виде сверху транспортного средства, поддерживающая точка Xa на стороне колеса поперечной рулевой тяги 15 находится на внешней стороне поддерживающих точек Ta и Ca на стороне колеса поперечной тяги 337 и работающей на сжатие тяги 338 в направлении ширины транспортного средства. Кроме того, поддерживающая точка Xb на стороне кузова транспортного средства (позиция шарового шарнира) поперечной рулевой тяги 15 находится на задней стороне от поддерживающей точки Xa на стороне колеса в направлении вперед и назад транспортного средства.
[0267] В случае этой конструкции подвески, против силы в направлении вперед и назад транспортного средства (силы, направленной назад к задней части транспортного средства), введенной в точке контакта шины и земли в случае, в котором сила в направлении вперед и назад транспортного средства является доминирующей, поддерживающая точка Ta на стороне колеса поперечной тяги 337 перемещается в направлении внутрь. Кроме того, поддерживающая точка Xa на стороне колеса поперечной рулевой тяги 15 поворачивается вокруг поддерживающей точки Xb на стороне кузова транспортного средства и перемещается в направлении наружу. Поддерживающая точка Ca на стороне колеса работающей на сжатие тяги 338 перемещается в направлении наружу. Следовательно, эта конструкция подвески может реализовывать подруливание за счет податливости, чтобы направлять колесо в направлении расхождения колес против введенной силы, направленной назад.
[0268] Кроме того, в этой конструкции подвески, для каждого из элементов нижних тяг, прямая линия воображаемо соединяет внутреннюю поддерживающую точку на стороне кузова транспортного средства с внешней поддерживающей точкой на стороне колеса. Точка пересечения этих воображаемых прямых линий служит в качестве воображаемой нижней точки поворота нижних тяг. Ось поворотного шкворня является прямой линией, соединяющей эту воображаемую нижнюю точку поворота с верхней точкой поворота, сформированной посредством верхнего конца стойки.
В этом варианте осуществления, ось поворотного шкворня задается таким образом, что ось поворотного шкворня проходит через точку внутри поверхности контакта или пятна контакта шины и земли в состоянии рулевого колеса 2 в нейтральной позиции, и плечо стабилизации находится внутри поверхности контакта или пятна контакта шины и земли.
[0269] Например, ось поворотного шкворня задается таким образом, что угол продольного наклона поворотного шкворня равен 0 градусов, плечо стабилизации равно 0 мм, и радиус плеча обкатки колеса равен значению положительного плеча обкатки колеса, большему или равному 0 мм. Кроме того, поперечный наклон поворотного шкворня задается в таком диапазоне (например, меньшем или равном 15 градусов), что поперечный наклон поворотного шкворня становится небольшим в рамках диапазона, допускающего становление радиуса плеча обкатки колеса положительным.
При такой заданной геометрии подвески система подвески позволяет задавать меньшим след или траекторию центра поверхности контакта шины и земли во время операции выполнения руления и уменьшать крутильный крутящий момент шины.
[0270] Следовательно, система подвески может уменьшать осевую силу зубчатой рейки, как следствие, уменьшать момент вокруг оси поворотного шкворня и уменьшать вывод актуатора 8 рулевого управления. Кроме того, система подвески может управлять направлением колеса за счет меньшей силы и, вследствие этого, улучшать стабильность и управляемость.
В устройстве 1B подвески согласно этому варианту осуществления два элемента нижних тяг размещаются в пересекающемся состоянии с пересечением друг друга. В этой конструкции, проще располагать воображаемую нижнюю точку поворота на внутренней стороне центра поверхности контакта шины и земли.
[0271] Следовательно, проще задавать поперечный наклон поворотного шкворня равным значению, более близкому к 0 градусов, и увеличивать радиус плеча обкатки колеса на стороне положительного плеча обкатки колеса.
Кроме того, несмотря на возможность влияния на способность к прямолинейному движению конструкции подвески, посредством задания угла продольного наклона поворотного шкворня равным 0 градусов и плеча стабилизации равным 0 мм, задание положительного плеча обкатки колеса уменьшает это влияние. Кроме того, система подвески обеспечивает способность к прямолинейному движению посредством добавления управления с помощью актуатора 8 рулевого управления. Таким образом, система подвески может улучшать стабильность и управляемость.
[0272] Кроме того, что касается ограничения поперечного наклона поворотного шкворня предварительно определенным диапазоном, за счет операции выполнения руления актуатора 8 рулевого управления можно не допускать возникновения ощущения тяжести у водителя. Что касается отдачи посредством внешней силы от поверхности дороги, система подвески может справляться с внешней силой с помощью актуатора 8 рулевого управления и тем самым не допускать влияния на водителя. Таким образом, система подвески может улучшать стабильность и управляемость.
[0273] Как упомянуто выше, устройство 1B подвески согласно этому варианту осуществления позволяет задавать воображаемую нижнюю точку поворота к внутренней стороне в направлении ширины транспортного средства вследствие пересекающейся компоновки поперечной тяги 337, протягивающейся приблизительно параллельно полуоси, и работающей на сжатие тяги 338, пересекающей поперечную тягу 337 при виде сверху транспортного средства. Кроме того, ось поворотного шкворня, заданная посредством этой воображаемой нижней точки поворота, задается таким образом, что поперечный наклон поворотного шкворня является небольшим, и плечо стабилизации формируется внутри поверхности или пятна контакта шины и земли. Следовательно, устройство подвески может снижать момент вокруг оси поворотного шкворня.
[0274] Следовательно, устройство подвески обеспечивает такую операцию выполнения руления, чтобы выполнять руление колесами за счет меньшей осевой силы зубчатой рейки и управлять направлениями колес за счет меньшей силы, так что устройство подвески может улучшать стабильность и управляемость.
В результате снижения момента вокруг оси поворотного шкворня, устройство подвески может уменьшать нагрузку, прикладываемую на валу 14 зубчатой рейки и поперечной рулевой тяге(ах) 15, так что можно упрощать составные части.
Кроме того, можно использовать актуатор с меньшей производительностью по приведению в действие в качестве актуатора 8 рулевого управления, реализующего систему рулевого управления по проводам, и тем самым уменьшать стоимость и вес транспортного средства.
[0275] Например, по сравнению с традиционной системой подвески на основе рулевого управления по проводам, конструкция согласно этому варианту осуществления позволяет уменьшать вес приблизительно на 10% и уменьшать стоимость приблизительно на 50%, главным образом, посредством упрощения элементов нижних тяг и уменьшения размера актуатора 8 рулевого управления.
Кроме того, устройство подвески имеет конструкцию с возможностью увеличивать плечо стабилизации во время операции выполнения руления. Следовательно, устройство подвески может ограничивать увеличение угла поворота при выполнении руления при операции движения на повороте, формирующей высокое поперечное ускорение или боковое ускорение.
[0276] Кроме того, поскольку воображаемая нижняя точка поворота перемещается к внутренней стороне посредством действия боковой силы, действующей на колесо во время операции выполнения руления, радиус плеча обкатки колеса увеличивается, и способность к прямолинейному движению посредством стабилизирующего крутящего момента (SAT) может быть повышена.
При пересекающейся компоновке элементов нижних тяг поддерживающая точка элемента нижней тяги может быть размещена около центра колеса, так что можно уменьшать вес стакана 33 полуоси.
[0277] Взаимосвязь между (углом) поперечного наклона поворотного шкворня и радиусом плеча обкатки колеса согласно этому варианту осуществления показана на фиг. 12. Фиг. 12 показывает, в дополнение к вышеуказанной компоновке работающего на сжатие типа согласно этому варианту осуществления, компоновку работающего на растяжение типа согласно этому варианту осуществления, и дополнительно показывает, в качестве сравнительных примеров, непересекающиеся компоновки работающего на растяжение типа и работающего на сжатие типа для непересекающихся элементов нижних тяг (см. первый вариант осуществления) и компоновку с одним поворотным элементом.
[0278] Как показано на фиг. 12, в практических примерах работающего на сжатие типа и работающего на растяжение типа согласно изобретению, можно задавать поперечный наклон поворотного шкворня равным углу, более близкому к 0 градусов, и задавать радиус плеча обкатки колеса равным большему значению на стороне положительного плеча обкатки колеса, по сравнению с примером с одним поворотным элементом и сравнительными примерами с двумя поворотными элементами и без пересечения для непересекающихся элементов нижних тяг.
В частности, в практическом примере для работающего на сжатие типа согласно настоящему изобретению, можно получать большие преимущества касательно эффекта снижения поперечного наклона поворотного шкворня до нуля градусов и эффекта увеличения радиуса плеча обкатки колеса на стороне положительного плеча обкатки колеса.
[0279] Кроме того, поперечная тяга 337 размещается приблизительно параллельно полуоси, и поддерживающая точка Ta на стороне колеса поперечной тяги 337 располагается на задней стороне от центра колеса в направлении вперед и назад транспортного средства. Работающая на сжатие тяга 338 наклоняется больше поперечной тяги 337 относительно полуоси (расположена в такой ориентации, что поддерживающая точка на стороне колеса на передней стороне, а поддерживающая точка на стороне кузова транспортного средства находится на задней стороне). Поддерживающая точка Ca на стороне колеса работающей на сжатие тяги 338 находится на передней стороне от центра колеса в направлении вперед и назад транспортного средства. Поддерживающая точка Tb на стороне кузова транспортного средства поперечной тяги 337 находится на задней стороне от поддерживающей точки Ca на стороне колеса работающей на сжатие тяги 338 в направлении вперед и назад транспортного средства. Поддерживающая точка Cb на стороне кузова транспортного средства работающей на сжатие тяги 338 находится на задней стороне от поддерживающей точки Ta на стороне колеса поперечной тяги 337 в направлении вперед и назад транспортного средства.
[0280] В этой компоновке тяг боковая сила, введенная в колесо, может возникать, главным образом, за счет поперечной тяги 337. Кроме того, в этой компоновке тяг поддерживающая точка Tb на стороне кузова транспортного средства поперечной тяги 337 располагается на передней стороне от центра колеса в направлении вперед и назад транспортного средства. Следовательно, когда боковая сила (действующая в направлении внутрь к центру транспортного средства) вводится в колесо, поддерживающая точка Ta на стороне колеса поперечной тяги 337 перемещается в направлении внутрь к центру транспортного средства, и поддерживающая точка Ca на стороне колеса работающей на сжатие тяги 338 перемещается в направлении наружу к внешней стороне транспортного средства. Следовательно, эта компоновка тяг может реализовывать подруливание за счет податливости, чтобы направлять колесо в направлении расхождения колес против введенной боковой силы.
[0281] В устройстве 1B подвески, при виде сверху транспортного средства, поддерживающая точка Xa на стороне колеса поперечной рулевой тяги 15 находится на внешней стороне поддерживающих точек Ta и Ca на стороне колеса поперечной тяги 337 и работающей на сжатие тяги 338 в направлении ширины транспортного средства. Кроме того, поддерживающая точка Xb на стороне кузова транспортного средства поперечной рулевой тяги 15 находится на задней стороне от поддерживающей точки Xa на стороне колеса в направлении вперед и назад транспортного средства.
[0282] В случае этой конструкции подвески, против силы в направлении вперед и назад транспортного средства (силы, направленной назад к задней части транспортного средства), введенной в точке контакта шины и земли в случае, в котором сила в направлении вперед и назад транспортного средства является доминирующей, поддерживающая точка Ta на стороне колеса поперечной тяги 337 перемещается в направлении внутрь. Кроме того, поддерживающая точка Xa на стороне колеса поперечной рулевой тяги 15 поворачивается вокруг поддерживающей точки Xb на стороне кузова транспортного средства и перемещается в направлении наружу. Поддерживающая точка Ca на стороне колеса работающей на сжатие тяги 338 перемещается в направлении наружу. Следовательно, эта конструкция подвески может реализовывать подруливание за счет податливости, чтобы направлять колесо в направлении расхождения колес.
Следовательно, устройство подвески транспортного средства согласно этому варианту осуществления может предоставлять соответствующую характеристику подруливания за счет податливости относительно продольной силы транспортного средства.
[0283] Фиг. 41(a) и 41(b) являются видами, показывающими подруливание за счет податливости под действием боковой силы и поперечную жесткость в устройстве 1B подвески согласно этому варианту осуществления и сравнительному примеру. В сравнительном примере на фиг. 41, система подвески является системой подвески работающего на сжатие типа, в которой элементы нижних тяг не пересекаются.
Как показано на фиг. 41, в случае конструкции устройства 1B подвески согласно этому варианту осуществления (сплошные линии на фиг. 40), подруливание за счет податливости под действием боковой силы повышается на 35%, а поперечная жесткость повышается на 29% по сравнению со сравнительным примером (пунктирные линии на фиг. 41).
[0284] Фиг. 42 является видом, показывающим подруливание за счет податливости под действием продольной силы в устройстве 1B подвески согласно этому варианту осуществления и сравнительному примеру. В сравнительном примере на фиг. 42, система подвески является системой подвески работающего на сжатие типа, в которой элементы нижних тяг не пересекаются.
Как показано на фиг. 42, в случае конструкции устройства 1B подвески согласно этому варианту осуществления (сплошные линии на фиг. 42), подруливание за счет податливости под действием продольной силы повышается на 28% по сравнению со сравнительным примером (пунктирные линии на фиг. 42).
[0285] В этом варианте осуществления, колеса 17FR, 17FL, 17RR и 17RL соответствуют колесу для шины, шине и механизму WH ступицы колеса. Поперечная тяга 337 соответствует элементу поперечной тяги и первому элементу тяги, а работающая на сжатие тяга 338 соответствует элементу работающей на сжатие тяги и второму элементу тяги. Поперечная рулевая тяга 15 соответствует элементу поперечной рулевой тяги.
[0286] Преимущества четвертого варианта осуществления
(1) Предусмотрен элемент поперечной тяги, соединяющий механизм WH ступицы колеса и колесо на нижней стороне от полуоси в направлении вверх и вниз транспортного средства и протягивающийся вдоль полуоси. Кроме того, предусмотрен элемент работающей на сжатие тяги. Соединительный участок элемента работающей на сжатие тяги с кузовом транспортного средства находится на задней стороне соединительного участка элемента поперечной тяги с кузовом транспортного средства в направлении вперед и назад транспортного средства, а соединительный участок элемента работающей на сжатие тяги с механизмом ступицы колеса находится на передней стороне соединительного участка элемента поперечной тяги с механизмом ступицы колеса в направлении вперед и назад транспортного средства. Кроме того, предусмотрен элемент поперечной рулевой тяги, соединенный с механизмом WH ступицы колеса на внешней стороне соединительных участков элемента поперечной тяги и элемента работающей на сжатие тяги с механизмом ступицы колеса, соединенный с кузовом транспортного средства на задней стороне соединительного участка элемента поперечной рулевой тяги с механизмом WH ступицы колеса и выполненный с возможностью выполнять руление колесом.
[0287] Следовательно, против силы, направленной назад в направлении вперед и назад транспортного средства, введенной в точке контакта шины и земли в случае, в котором продольная сила в направлении вперед и назад транспортного средства является доминирующей, соединительный участок на стороне колеса поперечной тяги перемещается в направлении внутрь. Кроме того, соединительный участок на стороне колеса элемента поперечной рулевой тяги поворачивается вокруг соединительного участка на стороне кузова транспортного средства и перемещается в направлении наружу. Соединительный участок на стороне колеса элемента работающей на сжатие тяги перемещается в направлении наружу. Следовательно, эта конструкция подвески может реализовывать подруливание за счет податливости, чтобы направлять колесо в направлении расхождения колес. Соответственно, в устройстве подвески транспортного средства, можно получать соответствующую характеристику подруливания за счет податливости против продольной силы в направлении вперед и назад транспортного средства.
[0288] (2) Соединительный участок между элементом поперечной тяги и механизмом WH ступицы колеса находится на задней стороне от полуоси в направлении вперед и назад транспортного средства, а соединительный участок между элементом поперечной тяги и кузовом транспортного средства находится на передней стороне от полуоси в направлении вперед и назад транспортного средства.
Следовательно, в случае боковой силы, введенной в колесо по мере поворота внешнего колеса, соединительный участок между элементом поперечной тяги и механизмом WH ступицы колеса может сдвигаться в направлении внутрь, и, как следствие, характеристика расхождения колес может быть передана поворачивающему внешнему колесу.
[0289] (3) Соединительный участок между элементом поперечной тяги и кузовом транспортного средства находится на задней стороне соединительного участка между элементом работающей на сжатие тяги и механизмом ступицы колеса в направлении вперед и назад транспортного средства.
Следовательно, можно задавать или фиксировать направление вращения в одном направлении при поддержании элемента поперечной тяги приблизительно параллельным полуоси.
[0290] (4) Соединительный участок между элементом работающей на сжатие тяги и механизмом WH ступицы колеса находится на передней стороне от полуоси в направлении вперед и назад транспортного средства, а соединительный участок между элементом работающей на сжатие тяги и кузовом транспортного средства находится на задней стороне соединительного участка между элементом поперечной тяги и механизмом ступицы колеса в направлении вперед и назад транспортного средства.
Эта компоновка тяг позволяет увеличивать угол наклона элемента работающей на сжатие тяги относительно полуоси и сдвигать позицию воображаемой нижней точки поворота в направлении внутрь к внутренней части кузова транспортного средства.
[0291] (5) Ось поворотного шкворня, имеющая нижнюю точку поворота, заданную в точке пересечения элемента поперечной тяги и элемента работающей на сжатие тяги при виде сверху транспортного средства, проходит через поверхность контакта или пятно контакта шины и земли в состоянии, в котором рулевое колесо находится в нейтральной позиции.
Эта компоновка позволяет снижать момент вокруг оси поворотного шкворня, выполнять руление колесом за счет меньшей осевой силы зубчатой рейки и управлять направлением колеса за счет меньшей силы. Следовательно, можно улучшать стабильность и управляемость.
[0292] (6) Устройство подвески выполнено с возможностью подвешивать управляемое колесо, руление которым осуществляется посредством системы рулевого управления по проводам. Следовательно, посредством использования актуатора рулевого управления из системы рулевого управления по проводам, можно осуществлять управление в соответствии с заданием плеча стабилизации согласно этому варианту осуществления, аналогично второму и третьему вариантам осуществления, и повышать уровень безопасности и управляемость.
[0293] (7) При виде сверху транспортного средства элементы поперечной и работающей на сжатие тяги, соединяющие кузов транспортного средства и колесо, размещаются посредством расположения элемента поперечной тяги вдоль полуоси и расположения элемента работающей на сжатие тяги таким образом, что элемент работающей на сжатие тяги пересекает элемент поперечной тяги с соединительным участком на стороне колеса элемента работающей на сжатие тяги, находящимся на передней стороне элемента поперечной тяги, и соединительным участком на стороне кузова транспортного средства элемента работающей на сжатие тяги, находящимся на задней стороне элемента поперечной тяги. Кроме того, элемент поперечной рулевой тяги для руления колесом соединяется с механизмом WH ступицы колеса на внешней стороне соединительных участков элемента поперечной тяги и элемента работающей на сжатие тяги с механизмом ступицы колеса и соединяется с кузовом транспортного средства на задней стороне соединительного участка элемента поперечной рулевой тяги с механизмом WH ступицы колеса. Следовательно, против продольной силы в направлении назад, соединительный участок на стороне колеса элемента поперечной тяги принудительно перемещается в направлении внутрь, а соединительный участок на стороне колеса элемента поперечной рулевой тяги принудительно перемещается во внешнем направлении.
[0294] Следовательно, против силы, направленной назад в направлении вперед и назад транспортного средства, введенной в точке контакта шины и земли в случае, в котором продольная сила в направлении вперед и назад транспортного средства является доминирующей, соединительный участок на стороне колеса элемента поперечной тяги перемещается в направлении внутрь. Кроме того, соединительный участок на стороне колеса элемента поперечной рулевой тяги поворачивается вокруг соединительного участка на стороне кузова транспортного средства и перемещается в направлении наружу. Поддерживающая точка соединительного участка на стороне колеса элемента работающей на сжатие тяги перемещается в направлении наружу.
[0295] Следовательно, эта конструкция подвески может реализовывать подруливание за счет податливости, чтобы направлять колесо в направлении расхождения колес. Соответственно, в устройстве подвески транспортного средства, можно получать соответствующую характеристику подруливания за счет податливости против продольной силы в направлении вперед и назад транспортного средства.
Четвертый вариант осуществления в отношении преимуществ схемы управления/приведения в действие 6 является идентичным первому варианту осуществления.
[0296] Пятый вариант осуществления
Далее приводится пояснение в отношении пятого варианта осуществления настоящего изобретения.
Моторное транспортное средство 1 согласно пятому варианту осуществления по функции и конструкции является идентичным фиг. 1 в первом варианте осуществления. Моторное транспортное средство 1 согласно пятому варианту осуществления отличается по конструкции устройства 1B подвески от первого варианта осуществления.
Следовательно, нижеприведенное пояснение направлено на конструкцию устройства 1B подвески.
Фиг. 43 является видом в перспективе, схематично показывающим конструкцию устройства 1B подвески согласно пятому варианту осуществления. Фиг. 44 является видом в плане, схематично показывающим конструкцию устройства 1B подвески по фиг. 43. Фиг. 45(a) и 45(b) являются видом спереди в частичном сечении и видом сбоку в частичном сечении, схематично показывающими конструкцию устройства 1B подвески по фиг. 43. Фиг. 46(a) является видом в плане в частичном сечении (для левого переднего колеса), схематично показывающим конструкцию устройства 1B подвески по фиг. 43, и фиг. 46(b) является видом, показывающим пятно контакта шины и земли (для правого переднего колеса).
[0297] Как показано на фиг. 43-46, устройство подвески или система 1B подвески является устройством подвески работающего на растяжение типа, поддерживающим колеса 17FR и 17FL, присоединенные к механизмам WH ступиц колес, и включает в себя, на каждой из правой и левой сторон, стакан 33 полуоси, включающий в себя ось 32 или вал колеса (полуось), поддерживающую колесо 17FR или 17FL с возможностью вращения, множество элементов тяг, расположенных в направлении ширины кузова транспортного средства от поддерживающего участка на внутренней стороне или стороне кузова транспортного средства и соединенных со стаканом 33 полуоси, и пружинный элемент 34, такой как спиральная пружина.
[0298] Элементы тяг включают в себя поперечную тягу 437 (элемент поперечной тяги в качестве первого элемента тяги) и работающую на растяжение тягу 438 (элемент работающей на растяжение тяги в качестве второго элемента тяги), которые являются элементами нижних тяг, поперечную рулевую тягу 15 (элемент поперечной рулевой тяги) и стойку ST (пружинный элемент 34 и амортизатор 40). В этом варианте осуществления, устройство 1B подвески является системой подвески стоечного типа, и стойка ST, сформированная в качестве единого блока посредством пружинного элемента 34 и амортизатора 40, протягивается к верхнему концу, соединенному с поддерживающим участком на стороне кузова транспортного средства, расположенным выше полуоси 32 (в дальнейшем в этом документе, верхний конец стойки ST упоминается как "верхняя точка поворота" надлежащим образом).
[0299] Поперечная тяга 437 и работающая на растяжение тяга 438, формирующие нижние тяги, соединяют поддерживающий участок на стороне кузова транспортного средства, расположенный ниже полуоси 32, с нижним концом стакана 33 полуоси. В этом варианте осуществления, поперечная тяга 437 и работающая на растяжение тяга 438 имеют форму I-образного рычага, независимого друг от друга. Поперечная тяга 437 и работающая на растяжение тяга 438 соединяются с кузовом транспортного средства в двух соответствующих поддерживающих или соединительных участках и соединяются со стороной полуоси 32 в двух соответствующих поддерживающих или соединительных участках. Кроме того, поперечная тяга 437 и работающая на растяжение тяга 438 в этом варианте осуществления выполнены с возможностью соединять кузов 1A транспортного средства и сторону полуоси 32 (стакан 33 полуоси) друг с другом в пересекающемся или перекрещивающемся состоянии, в котором поперечная и работающая на растяжение тяги 437 и 438 пересекают друг друга (в дальнейшем в этом документе, точка пересечения между воображаемыми тягами, сформированная посредством поперечной тяги 437 и работающей на растяжение тяги 438, упоминается как "нижняя точка поворота" надлежащим образом).
[0300] Из этих нижних тяг, поперечная тяга 437 располагается таким образом, что поперечная тяга 437 является приблизительно параллельной полуоси. При виде сверху транспортного средства поддерживающая точка Ta на стороне колеса поперечной тяги 437 находится на передней стороне от центра колеса (полуоси) в направлении вперед и назад транспортного средства. Работающая на растяжение тяга 438 располагается таким образом, что работающая на растяжение тяга 438 наклоняется относительно полуоси больше поперечной тяги 437 (работающая на растяжение тяга 438 ориентируется таким образом, что поддерживающая точка на стороне колеса находится на задней стороне, а поддерживающая точка на стороне кузова транспортного средства находится на передней стороне). Поддерживающая точка Ca на стороне колеса работающей на растяжение тяги 438 находится на задней стороне от центра колеса в направлении вперед и назад транспортного средства. Поддерживающая точка Tb на стороне кузова транспортного средства поперечной тяги 437 находится на передней стороне от поддерживающей точки Ca на стороне колеса работающей на растяжение тяги 438 в направлении вперед и назад транспортного средства. Поддерживающая точка Cb на стороне кузова транспортного средства работающей на растяжение тяги 438 находится на передней стороне от поддерживающей точки Ta на стороне колеса поперечной тяги 437 в направлении вперед и назад транспортного средства.
[0301] В этой компоновке тяг, когда центробежная сила к внешней стороне по отношению к повороту кузова транспортного средства действует в центре O контакта шины и земли (точке приложения силы), как показано на фиг. 46(b), боковая сила, действующая к центру поворота, против центробежной силы, может возникать, главным образом, за счет поперечной тяги 437. Кроме того, в этой компоновке тяг поддерживающая точка Tb на стороне кузова транспортного средства поперечной тяги 437 располагается на задней стороне от центра колеса в направлении вперед и назад транспортного средства. Следовательно, когда боковая сила (действующая в направлении внутрь) вводится в колесо, поддерживающая точка Ta на стороне колеса поперечной тяги 437 перемещается в направлении внутрь к центру транспортного средства, и поддерживающая точка Ca на стороне колеса работающей на растяжение тяги 438 перемещается в направлении наружу к внешней стороне транспортного средства. Следовательно, эта компоновка тяг может реализовывать подруливание за счет податливости, чтобы направлять колесо в направлении схождения колес против введенной боковой силы.
[0302] Поперечная рулевая тяга 15 находится на нижней стороне от полуоси 32 и выполнена с возможностью соединять вал 14 зубчатой рейки со стаканом 33 полуоси. Вал 14 зубчатой рейки выполнен с возможностью передавать вращающую силу (силу поворота при выполнении руления), введенную из рулевого колеса 2, и тем самым формировать силу на валу или осевую силу для поворота или руления колесами. Следовательно, стакан 33 полуоси принимает осевую силу в направлении ширины транспортного средства из поперечной рулевой тяги 15 в соответствии с вращением рулевого колеса 2 и, вследствие этого, поворачивает либо выполняет руление колесом 17FR или 17FL.
[0303] В устройстве подвески согласно этому варианту осуществления, при виде сверху транспортного средства, показанному на фиг. 46(a), поддерживающая точка Xa на стороне колеса (стороне стакана 33 полуоси) поперечной рулевой тяги 15 находится на внешней стороне, в направлении ширины транспортного средства, поддерживающих точек Ta и Ca на стороне колеса поперечной тяги 437 и работающей на растяжение тяги 438. Кроме того, поддерживающая точка Xb на стороне кузова транспортного средства (позиция шарового шарнира) поперечной рулевой тяги 15 находится на задней стороне от поддерживающей точки Xa на стороне колеса в направлении вперед и назад транспортного средства.
Как упомянуто выше, поддерживающая точка Ca на стороне колеса работающей на растяжение тяги 438 находится на задней стороне от центра колеса в направлении вперед и назад транспортного средства, и поддерживающая точка Ta на стороне колеса поперечной тяги 437 находится на передней стороне от центра колеса в направлении вперед и назад транспортного средства. Поддерживающая точка Tb на стороне кузова транспортного средства поперечной тяги 437 находится на передней стороне от поддерживающей точки Ca на стороне колеса работающей на растяжение тяги 438 в направлении вперед и назад транспортного средства. Поддерживающая точка Cb на стороне кузова транспортного средства работающей на растяжение тяги 438 находится на передней стороне от поддерживающей точки Ta на стороне колеса поперечной тяги 437 в направлении вперед и назад транспортного средства.
[0304] В этой компоновке тяг, в случае, в котором сила в направлении вперед и назад транспортного средства или в продольном направлении является доминирующей (к примеру, при операции торможения при повороте с относительно резким торможением) против продольной силы в направлении вперед и назад транспортного средства (силы, направленной назад к задней части транспортного средства), введенной в точку контакта шины и земли, поддерживающая точка Xa на стороне колеса поперечной рулевой тяги 15 поворачивается вокруг поддерживающей точки Xb на стороне кузова транспортного средства и перемещается в направлении наружу к внешней стороне транспортного средства. Кроме того, поддерживающая точка Ca на стороне колеса работающей на сжатие тяги 438 работающей на растяжение тяги 438 перемещается в направлении внутрь. Поддерживающая точка Ta на стороне колеса поперечной тяги 437 перемещается в направлении наружу. Следовательно, эта компоновка тяг может реализовывать подруливание за счет податливости, чтобы направлять колесо в направлении расхождения колес и обеспечивать подруливание за счет продольной податливости в направлении вперед и назад транспортного средства.
[0305] В устройстве 1B подвески согласно этому варианту осуществления, как показано на фиг. 39(b), ось поворотного шкворня задается таким образом, что ось поворотного шкворня проходит через поверхность контакта или пятно контакта шины и земли в нейтральном состоянии, в котором рулевое колесо 2 находится в нейтральной позиции, и плечо стабилизации находится внутри поверхности или пятна контакта шины и земли. В частности, в устройстве 1B подвески по этому варианту осуществления, угол продольного наклона поворотного шкворня задается равным значению около нуля, и ось поворотного шкворня задается таким образом, что плечо стабилизации приближается к нулю. Это задание позволяет уменьшать крутильный крутящий момент шины во время операции выполнения руления и уменьшать момент вокруг оси поворотного шкворня. Кроме того, радиус плеча обкатки колеса задается равным значению положительного плеча обкатки колеса, большему или равному нулю. При таком задании плечо стабилизации формируется с величиной, соответствующей радиусу плеча обкатки колеса относительно угла бокового скольжения на стороне шины во время операции выполнения руления, чтобы выполнять руление колесом, и, следовательно, система подвески может обеспечивать способность к прямолинейному движению или рабочие характеристики движения по прямой.
[0306] В этом варианте осуществления, поперечная тяга 437 и работающая на растяжение тяга 438, выступающие в качестве элементов нижних тяг, соединяют кузов 1 транспортного средства и сторону полуоси 32 (нижний конец стакана 33 полуоси) друг с другом в пересекающемся или перекрещивающемся состоянии, в котором поперечная тяга 437 и работающая на растяжение тяга 438 пересекают друг друга. Эта пересекающаяся компоновка позволяет задавать начальный угол поперечного наклона поворотного шкворня меньшим и задавать начальный радиус плеча обкатки колеса большим на стороне положительного плеча обкатки колеса по сравнению с непересекающейся компоновкой, в которой поперечная и работающая на растяжение тяги 437 и 438 не пересекают друг друга. Следовательно, система подвески может снижать крутильный крутящий момент шины во время операции выполнения руления и уменьшать осевую силу зубчатой рейки, требуемую для операции выполнения руления. Кроме того, согласно этому варианту осуществления, воображаемая нижняя точка поворота перемещается к внешней стороне кузова транспортного средства за счет действия боковой силы, действующей на колесо во время операции выполнения руления, так что можно улучшать отклик при выполнении руления.
[0307] Конкретные примеры конструкции
Фиг. 47 является схематичным видом, показывающим пример конструкции устройства 1B подвески с помощью устройства подвески работающего на растяжение типа. Как показано на фиг. 47, в компоновке с двумя поворотными элементами, в которой элементы нижних тяг выполнены с возможностью пересекать друг друга в системе подвески работающего на сжатие типа, элементы нижних тяг обеспечивают такую операцию выполнения руления, чтобы направлять колесо по мере поворота внешнего колеса по внешней стороне по отношению к движению при повороте транспортного средства, посредством вращения вперед к передней части транспортного средства вокруг поддерживающих точек на стороне кузова транспортного средства (состояние, показанное посредством пунктирных линий). В этом случае, воображаемая нижняя точка поворота размещается в точке пересечения между элементами нижних тяг. Эта компоновка подвески позволяет задавать воображаемую нижнюю точку поворота в позиции на расположенной внутри стороне или внутренней стороне кузова транспортного средства по сравнению с непересекающейся компоновкой подвески, в которой элементы нижних тяг не пересекаются. Следовательно, эта компоновка подвески позволяет задавать начальный радиус плеча обкатки колеса большим в направлении положительного плеча обкатки колеса.
[0308] В системе подвески работающего на растяжение типа, показанной на фиг. 47, поскольку угол поворота работающего на растяжение стержня является большим при операции выполнения руления, воображаемая нижняя точка поворота сдвигается к внешней стороне. В этом случае, при виде сверху транспортного средства, с точки зрения, сфокусированной на расстоянии от центровой линии шины в направлении вперед и назад шины до воображаемой нижней точки поворота, воображаемая нижняя точка поворота перемещается в направлении наружу от центровой линии шины на внутренней стороне центровой линии шины, и, следовательно, радиус плеча обкатки колеса становится меньшим в рамках диапазона положительного плеча обкатки колеса. Следовательно, в системе подвески работающего на растяжение типа, когда применяется этот вариант осуществления, осевая сила зубчатой рейки увеличивается при операции выполнения руления по мере поворота внешнего колеса. Тем не менее, начальный радиус плеча обкатки колеса в состоянии без выполнения руления задается достаточно большим. Следовательно, осевая сила зубчатой рейки может задаваться меньшей по сравнению с непересекающейся системой подвески работающего на растяжение типа.
[0309] В случае непересекающейся системы подвески работающего на растяжение типа, в которой элементы нижних тяг не пересекаются, поскольку угол поворота работающего на растяжение стержня является большим при операции выполнения руления, воображаемая нижняя точка поворота сдвигается к внутренней стороне. В этом случае, при виде сверху транспортного средства расстояние от центровой линии шины в направлении вперед и назад шины до воображаемой нижней точки поворота находится на внутренней стороне центровой линии шины, и, следовательно, радиус плеча обкатки колеса становится больше в направлении к положительному плечу обкатки колеса. Следовательно, осевая сила зубчатой рейки снижается при операции выполнения руления. Тем не менее, поскольку воображаемая нижняя точка поворота находится на удлинении каждой тяги, радиус плеча обкатки колеса в начальном состоянии без операции выполнения руления является небольшим, и непросто снижать в значительной степени осевую силу зубчатой рейки.
[0310] Работа
Далее приводится пояснение в отношении работы устройства 1B подвески согласно этому варианту осуществления.
В устройстве 1B подвески согласно этому варианту осуществления два элемента нижних тяг имеют форму I-образного рычага. Поперечная тяга 437 выполнена с возможностью идти в направлении ширины транспортного средства от стакана 33 полуоси, а работающая на растяжение тяга 438 выполнена с возможностью идти под углом к передней части транспортного средства от нижнего конца стакана 33 полуоси в пересекающемся состоянии с пересечением поперечной тяги 437. В частности, поддерживающая точка Ta на стороне колеса поперечной тяги 437 находится на передней стороне от центра колеса в направлении вперед и назад транспортного средства. Поддерживающая точка Ca на стороне колеса работающей на растяжение тяги 438 находится на задней стороне от центра колеса в направлении вперед и назад транспортного средства. Поддерживающая точка Tb на стороне кузова транспортного средства поперечной тяги 437 находится на передней стороне поддерживающей точки Ca на стороне колеса работающей на растяжение тяги 438 в направлении вперед и назад транспортного средства. Поддерживающая точка Cb на стороне кузова транспортного средства работающей на растяжение тяги 438 находится на передней стороне от поддерживающей точки Ta на стороне колеса поперечной тяги 437 в направлении вперед и назад транспортного средства.
[0311] В этой компоновке подвески боковая сила, введенная в колесо во время операции выполнения руления и т.п., может возникать, по большей части, за счет поперечной тяги 437. Кроме того, в случае ввода боковой силы в направлении внутрь к центру транспортного средства в колесо на внешней стороне по отношению к повороту, поперечная тяга 437 вращается к внутренней стороне, а работающая на растяжение тяга 438 вращается к внешней стороне. Следовательно, эта компоновка тяг может предоставлять характеристику схождения колес для колеса.
[0312] В устройстве 1B подвески, при виде сверху транспортного средства, поддерживающая точка Xa на стороне колеса поперечной рулевой тяги 15 находится на внешней стороне поддерживающих точек Ta и Ca на стороне колеса поперечной тяги 437 и работающей на растяжение тяги 438 в направлении ширины транспортного средства. Кроме того, поддерживающая точка Xb на стороне кузова транспортного средства (позиция шарового шарнира) поперечной рулевой тяги 15 находится на задней стороне от поддерживающей точки Xa на стороне колеса в направлении вперед и назад транспортного средства.
[0313] В случае этой конструкции подвески, против силы в направлении вперед и назад транспортного средства (силы, направленной назад к задней части транспортного средства), введенной в точке контакта шины и земли в случае, в котором сила в направлении вперед и назад транспортного средства является доминирующей, поддерживающая точка Ta на стороне колеса поперечной тяги 437 перемещается в направлении наружу. Кроме того, поддерживающая точка Xa на стороне колеса поперечной рулевой тяги 15 поворачивается вокруг поддерживающей точки Xb на стороне кузова транспортного средства и перемещается в направлении наружу. Поддерживающая точка Ca на стороне колеса работающей на растяжение тяги 438 перемещается в направлении внутрь. Следовательно, эта конструкция подвески может реализовывать подруливание за счет податливости, чтобы направлять колесо в направлении расхождения колес.
[0314] В устройстве 1B подвески согласно этому варианту осуществления поперечная тяга 437 размещается приблизительно параллельно полуоси, и поддерживающая точка Ta на стороне колеса поперечной тяги 437 располагается на передней стороне от центра колеса в направлении вперед и назад транспортного средства. Работающая на растяжение тяга 438 наклоняется относительно поперечной тяги 437 (расположена в такой ориентации, что поддерживающая точка на стороне колеса находится на задней стороне, а поддерживающая точка на стороне кузова транспортного средства на передней стороне). Поддерживающая точка Ca на стороне колеса работающей на растяжение тяги 438 находится на задней стороне от центра колеса в направлении вперед и назад транспортного средства. Поддерживающая точка Tb на стороне кузова транспортного средства поперечной тяги 437 находится на задней стороне от поддерживающей точки Ca на стороне колеса работающей на растяжение тяги 438 в направлении вперед и назад транспортного средства. Поддерживающая точка Cb на стороне кузова транспортного средства работающей на растяжение тяги 438 находится на передней стороне от поддерживающей точки Ta на стороне колеса поперечной тяги 437 в направлении вперед и назад транспортного средства.
[0315] В этой компоновке тяг боковая сила, введенная в колесо, может возникать, главным образом, за счет поперечной тяги 437. Кроме того, в этой компоновке тяг поддерживающая точка Tb на стороне кузова транспортного средства поперечной тяги 437 располагается на задней стороне от центра колеса в направлении вперед и назад транспортного средства. Следовательно, когда боковая сила (действующая в направлении внутрь к центру транспортного средства) вводится в колесо, поддерживающая точка Ta на стороне колеса поперечной тяги 437 перемещается в направлении внутрь к центру транспортного средства, и поддерживающая точка Ca на стороне колеса работающей на растяжение тяги 438 перемещается в направлении наружу к внешней стороне транспортного средства. Следовательно, эта компоновка тяг может реализовывать подруливание за счет податливости, чтобы направлять колесо в направлении схождения колес против введенной боковой силы.
[0316] В устройстве 1B подвески поддерживающая точка Xa на стороне колеса поперечной рулевой тяги 15 находится на внешней стороне поддерживающих точек Ta и Ca на стороне колеса поперечной тяги 437 и работающей на растяжение тяги 438 в направлении ширины транспортного средства. Кроме того, поддерживающая точка Xb на стороне кузова транспортного средства поперечной рулевой тяги 15 находится на задней стороне от поддерживающей точки Xa на стороне колеса в направлении вперед и назад транспортного средства.
[0317] В случае этой конструкции подвески, против силы в направлении вперед и назад транспортного средства (силы, направленной назад), введенной в точке контакта шины и земли в случае, в котором сила в направлении вперед и назад транспортного средства является доминирующей, поддерживающая точка Ta на стороне колеса поперечной тяги 437 перемещается в направлении наружу. Кроме того, поддерживающая точка Xa на стороне колеса поперечной рулевой тяги 15 поворачивается вокруг поддерживающей точки Xb на стороне кузова транспортного средства и перемещается в направлении наружу. Поддерживающая точка Ca на стороне колеса работающей на растяжение тяги 438 перемещается в направлении внутрь. Следовательно, эта конструкция подвески может реализовывать подруливание за счет податливости, чтобы направлять колесо в направлении расхождения колес.
Следовательно, устройство подвески транспортного средства согласно этому варианту осуществления может предоставлять соответствующую характеристику подруливания за счет податливости относительно продольной силы транспортного средства.
[0318] В примерах четвертого и пятого вариантов осуществления настоящее изобретение применяется к устройству подвески, имеющему компоновку тяг работающего на сжатие типа или работающего на растяжение типа. Тем не менее, настоящее изобретение является применимым к устройству подвески другого типа.
В этом варианте осуществления, поперечная тяга 437 соответствует элементу поперечной тяги в качестве первого элемента тяги, а работающая на растяжение тяга 438 соответствует элементу работающей на растяжение тяги в качестве второго элемента тяги. Поперечная рулевая тяга 15 соответствует элементу поперечной рулевой тяги.
[0319] Преимущества пятого варианта осуществления
(1) Предусмотрен элемент поперечной тяги, соединяющий механизм WH ступицы колеса и колесо на нижней стороне от полуоси в направлении вверх и вниз транспортного средства и протягивающийся вдоль полуоси. Кроме того, предусмотрен элемент работающей на растяжение тяги. Соединительный участок элемента работающей на растяжение тяги с кузовом транспортного средства находится на передней стороне соединительного участка элемента поперечной тяги с кузовом транспортного средства в направлении вперед и назад транспортного средства, а соединительный участок элемента работающей на растяжение тяги с механизмом ступицы колеса находится на задней стороне соединительного участка элемента поперечной тяги с механизмом ступицы колеса в направлении вперед и назад транспортного средства. Кроме того, предусмотрен элемент поперечной рулевой тяги, соединенный с механизмом WH ступицы колеса на внешней стороне соединительных участков элемента поперечной тяги и элемента работающей на растяжение тяги с механизмом ступицы колеса, соединенный с элементом рулевой зубчатой рейки на задней стороне соединительного участка элемента поперечной рулевой тяги с механизмом WH ступицы колеса и выполненный с возможностью выполнять руление колесом.
[0320] Следовательно, против силы, направленной назад в направлении вперед и назад транспортного средства, введенной в точке контакта шины и земли в случае, в котором продольная сила в направлении вперед и назад транспортного средства является доминирующей, соединительный участок на стороне колеса поперечной тяги перемещается в направлении наружу. Кроме того, соединительный участок на стороне колеса элемента поперечной рулевой тяги поворачивается вокруг соединительного участка на стороне кузова транспортного средства и перемещается в направлении наружу. Соединительный участок на стороне колеса элемента работающей на растяжение тяги перемещается в направлении внутрь. Следовательно, эта конструкция подвески может реализовывать подруливание за счет податливости, чтобы направлять колесо в направлении расхождения колес. Соответственно, в устройстве подвески транспортного средства, можно получать соответствующую характеристику подруливания за счет податливости против продольной силы в направлении вперед и назад транспортного средства.
[0321] (2) Соединительный участок между элементом поперечной тяги и механизмом WH ступицы колеса находится на передней стороне от полуоси в направлении вперед и назад транспортного средства, а соединительный участок между элементом поперечной тяги и кузовом транспортного средства находится на задней стороне от полуоси в направлении вперед и назад транспортного средства.
Следовательно, в случае боковой силы, введенной в колесо по мере поворота внешнего колеса, соединительный участок между элементом поперечной тяги и механизмом WH ступицы колеса может сдвигаться в направлении внутрь, и, как следствие, характеристика схождения колес может быть передана поворачивающему внешнему колесу.
[0322] (3) Соединительный участок между элементом поперечной тяги и кузовом транспортного средства находится на передней стороне соединительного участка между элементом работающей на растяжение тяги и механизмом WH ступицы колеса в направлении вперед и назад транспортного средства.
Следовательно, можно задавать или фиксировать направление вращения в одном направлении при поддержании элемента поперечной тяги приблизительно параллельным полуоси.
[0323] (4) Соединительный участок между элементом работающей на растяжение тяги и механизмом WH ступицы колеса находится на задней стороне от полуоси в направлении вперед и назад транспортного средства, а соединительный участок между элементом работающей на растяжение тяги и кузовом транспортного средства находится на передней стороне соединительного участка между элементом поперечной тяги и механизмом WH ступицы колеса в направлении вперед и назад транспортного средства.
Эта компоновка тяг позволяет увеличивать угол наклона элемента работающей на растяжение тяги относительно полуоси и сдвигать позицию воображаемой нижней точки поворота в направлении внутрь к внутренней части кузова транспортного средства.
[0324] (5) При виде сверху транспортного средства элементы поперечной и работающей на растяжение тяги, соединяющие кузов транспортного средства и колесо, размещаются посредством расположения элемента поперечной тяги вдоль полуоси и расположения элемента работающей на растяжение тяги таким образом, что элемент работающей на растяжение тяги пересекает элемент поперечной тяги с соединительным участком на стороне колеса элемента работающей на растяжение тяги, находящимся на задней стороне элемента поперечной тяги, и соединительным участком на стороне кузова транспортного средства элемента работающей на растяжение тяги, находящимся на передней стороне элемента поперечной тяги. Кроме того, элемент поперечной рулевой тяги для руления колесом соединяется с механизмом WH ступицы колеса на внешней стороне соединительных участков элемента поперечной тяги и элемента работающей на растяжение тяги с механизмом ступицы колеса и соединяется с элементом рулевой зубчатой рейки на задней стороне соединительного участка элемента поперечной рулевой тяги с механизмом WH ступицы колеса. Следовательно, против продольной силы в направлении назад, соединительный участок на стороне колеса элемента поперечной тяги принудительно перемещается в направлении наружу, а соединительный участок на стороне колеса элемента поперечной рулевой тяги принудительно перемещается во внешнем направлении.
[0325] Следовательно, против силы, направленной назад в направлении вперед и назад транспортного средства, введенной в точке контакта шины и земли в случае, в котором продольная сила в направлении вперед и назад транспортного средства является доминирующей, соединительный участок на стороне колеса элемента поперечной тяги перемещается в направлении наружу. Кроме того, соединительный участок на стороне колеса элемента поперечной рулевой тяги поворачивается вокруг соединительного участка на стороне кузова транспортного средства и перемещается в направлении наружу. Поддерживающая точка соединительного участка на стороне колеса элемента работающей на растяжение тяги перемещается в направлении внутрь.
Следовательно, эта конструкция подвески может реализовывать подруливание за счет податливости, чтобы направлять колесо в направлении расхождения колес. Соответственно, в устройстве подвески транспортного средства, можно получать соответствующую характеристику подруливания за счет податливости против продольной силы в направлении вперед и назад транспортного средства.
[0326] (6) Ось поворотного шкворня, имеющая нижнюю точку поворота, заданную в точке пересечения элемента поперечной тяги и элемента работающей на растяжение тяги при виде сверху транспортного средства, проходит через поверхность контакта или пятно контакта шины и земли в состоянии, в котором рулевое колесо находится в нейтральной позиции.
Эта компоновка позволяет снижать момент вокруг оси поворотного шкворня, выполнять руление колесом за счет меньшей осевой силы зубчатой рейки и управлять направлением колеса за счет меньшей силы. Следовательно, можно улучшать стабильность и управляемость.
[0327] (7) Устройство подвески выполнено с возможностью подвешивать управляемое колесо, руление которым осуществляется посредством системы рулевого управления по проводам.
Следовательно, посредством использования актуатора рулевого управления из системы рулевого управления по проводам, можно осуществлять управление в соответствии с заданием оси поворотного шкворня согласно настоящему изобретению и повышать безопасность и управляемость.
[0328] Пример 1 варианта применения
Хотя третий и четвертый варианты осуществления поясняются посредством использования примеров, в которых устройство 1B подвески применяется к системе подвески для управляемых передних колес, устройство 1B подвески также является применимым к системе подвески для неуправляемых задних колес.
В этом случае, когда транспортное средство переходит вследствие операции выполнения руления в состояние поворачивания, и боковая сила прикладывается к заднему колесу, работающая на растяжение тяга и работающая на сжатие тяга изгибаются за счет действия боковой силы, точка пересечения этих тяг при виде сверху транспортного средства перемещается, и направление колеса изменяется относительно кузова транспортного средства (см. фиг. 40 и 47). А именно, элемент нижней тяги, протягивающийся вдоль полуоси, имеет небольшую величину перемещения в направлении вперед и назад за счет действия боковой силы, и другой элемент нижней тяги, расположенный под углом относительно полуоси, так что возникает угол в направлении вперед и назад, имеет большую величину перемещения в направлении вперед и назад за счет действия боковой силы.
[0329] Посредством использования этой характеристики, можно реализовывать намеченное подруливание за счет податливости.
В частности, устройство подвески работающего на растяжение типа 1B согласно пятому варианту осуществления может реализовывать характеристику, направляющую колесо на внешней стороне по отношению к повороту к направлению схождения колес, так что этот устройство подвески является эффективным при использовании для задней подвески.
[0330] Преимущество
Первый и второй элементы тяг для соединения механизма ступицы колеса и кузова транспортного средства выполнены с возможностью пересекать друг друга при виде сверху транспортного средства на нижней стороне от полуоси в направлении вверх и вниз транспортного средства.
Следовательно, элементы тяг изгибаются за счет действия боковой силы во время поворота, точка пересечения элементов тяг при виде сверху транспортного средства сдвигается, и, как следствие, направление колеса может быть изменено относительно кузова транспортного средства. Следовательно, можно реализовывать намеченное подруливание за счет поперечной податливости.
[0331] Пример 2 варианта применения
Хотя четвертый и пятый варианты осуществления поясняются посредством использования примеров, в которых устройство 1B подвески применяется к системе подвески для управляемых передних колес, устройство 1B подвески также является применимым к системе подвески для управляемых задних колес.
Кроме того, в этом случае воображаемая нижняя точка поворота может сдвигаться к внутренней стороне транспортного средства в направлении ширины или в поперечном направлении транспортного средства, аналогично четвертому варианту осуществления. Кроме того, ось поворотного шкворня, заданная посредством этой воображаемой нижней точки поворота, задается таким образом, что плечо стабилизации находится в пределах поверхности или пятна контакта шины и земли. Следовательно, можно снижать момент вокруг оси поворотного шкворня. Следовательно, можно выполнять руление колесами за счет меньшей осевой силы зубчатой рейки, управлять направлением колес за счет меньшей силы и, вследствие этого, улучшать управляемость и стабильность.
[0332] Пример 3 варианта применения
В четвертом и пятом вариантах осуществления плечо стабилизации задается в пределах поверхности контакта шины и земли, и в качестве примера, плечо стабилизации задается равным значению около нуля.
В отличие от этого задания, в этом примере варианта применения, состояние задания плеча стабилизации ограничивается диапазоном от центра пятна контакта шины и земли до переднего края пятна контакта шины и земли.
Преимущество
В случае компоновки задания плеча стабилизации в диапазоне от центра пятна контакта шины и земли до переднего края пятна контакта шины и земли, можно достигать обеспечения способности к прямолинейному движению и уменьшения тяжести операции руления одновременно и, вследствие этого, улучшать управляемость и безопасность.
[0333] Пример 4 варианта применения
В четвертом и пятом вариантах осуществления, область, окруженная посредством штрихпунктирной линии с одной точкой в координатной плоскости, показанной на фиг. 7, выбирается в качестве примера области, достаточной для задания. В отличие от этого, можно задавать, в качестве соответствующей области задания, внутреннюю область (в направлении понижения поперечного наклона поворотного шкворня и направлении увеличения радиуса плеча обкатки колеса) в диапазоне, представленном посредством граничной линии, определенной посредством изоплетической линии, которая используется в качестве граничной линии и которая является линией равного значения осевой силы зубчатой рейки, на которую обращается внимание.
Преимущество
Можно допускать наибольшее значение осевой силы зубчатой рейки и задавать геометрию подвески в рамках диапазона, меньшего или равного наибольшему значению осевой силы зубчатой рейки.
[0334] Пример 5 варианта применения
В примерах четвертого и пятого вариантов осуществления и примерах вариантов применения, устройство 1B подвески применяется к транспортному средству, оснащенному устройством рулевого управления на основе рулевого управления по проводам. Тем не менее, можно применять устройство 1B подвески к транспортному средству, оснащенному другим устройством рулевого управления с механическим рулевым управлением или с рулевым приводом.
В этом случае, ось поворотного шкворня определяется в соответствии с состоянием согласно вышеуказанным результатам анализа, плечо стабилизации задается в пределах поверхности контакта шины и земли, и тяги механизма на основе механического рулевого управления размещаются в соответствии с этими настройками.
Преимущество
Даже в механизме на основе механического рулевого управления, можно снижать момент вокруг поворотного шкворня, вследствие этого, снижать требуемую силу поворота при выполнении руления или усилие для поворота при выполнении руления водителя и улучшать стабильность и управляемость.
[0335] Пример 6 варианта применения
В примерах четвертого и пятого вариантов осуществления и примерах вариантов применения, настоящее изобретение применяется к устройству подвески стоечного типа в качестве примера. Тем не менее, можно применять настоящее изобретение к устройству подвески, имеющему верхний рычаг. В этом случае, верхняя точка поворота является точкой соединения между верхним рычагом и стаканом полуоси.
[0336] Шестой вариант осуществления
Шестой вариант осуществления настоящего изобретения поясняется далее со ссылкой на фиг. 48. Шестой вариант осуществления отличается по конфигурации секции 56 управления задержкой от первого варианта осуществления. В шестом варианте осуществления секция 56 управления задержкой сконфигурирована так, как показано на фиг. 48.
Как показано на фиг. 48, секция 56 управления задержкой включает в себя секцию 56a определения начала руления, сумматор 56e, секцию 56g выбора и секцию 56h регулировки усиления.
[0337] Секция 56a определения начала руления формирует сигнал начала руления или сигнал Sss датчика начала руления в соответствии с углом θs поворота при выполнении руления, считываемым посредством датчика 4 угла поворота при выполнении руления, и доставляет сигнал начала руления или сигнал Sss датчика начала руления в секцию 56g выбора. Сигнал Sss датчика начала руления является сигналом, который поддерживается в активированном состоянии с момента начала руления или с момента времени, в который операция руления вправо или влево начинается из состояния, в котором рулевое колесо 2 удерживается в нейтральном состоянии в течение предварительно определенной длительности, для предоставления возможности определения состояния движения по прямой, например, до момента, в который нейтральная позиция определяется в следующий раз.
[0338] Секция 56g выбора включает в себя нормально замкнутый неподвижный контактный вывод ta, нормально разомкнутый неподвижный контактный вывод tb и подвижный контактный вывод tc для выбора одного из неподвижных контактных выводов ta и tb. Подвижный контактный вывод tc выполнен с возможностью принимать величину δa управления обеспечением способности к прямолинейному движению, выведенную из секции SG обеспечения способности к прямолинейному движению. Нормально замкнутый неподвижный контактный вывод ta соединяется через вторую секцию 56i регулировки усиления с сумматором 56e. Нормально разомкнутый неподвижный контактный вывод tb соединяется через первую секцию 56h регулировки усиления с сумматором 56e.
[0339] Секция 56g выбора выбирает состояние соединения подвижного контактного вывода tc с нормально замкнутым неподвижным контактным выводом ta, когда сигнал Sss датчика начала руления, выведенный из секции 56a определения начала руления, находится в деактивированном состоянии. Секция 56g выбора выбирает состояние соединения подвижного контактного вывода tc с нормально разомкнутым неподвижным контактным выводом tb, когда сигнал Sss датчика начала руления, выведенный из секции 56a определения начала руления, находится в активированном состоянии.
[0340] Первая секция 56h регулировки усиления прекращает управление обеспечением способности к прямолинейному движению для целевого угла δ* поворота при выполнении руления в течение предварительно определенного периода времени, например, в 0,1 секунды, согласно вышеуказанному начальному или первоначальному периоду T1 отклика, когда величина δa управления обеспечением способности к прямолинейному движению вводится через секцию 56g выбора. Когда величина δa управления обеспечением способности к прямолинейному движению вводится через секцию 56g выбора в первую секцию 56h регулировки усиления, первая секция 56h регулировки усиления прекращает вывод величины δa управления обеспечением способности к прямолинейному движению (эта операция соответствует операции задания усиления Ga контура управления равным "0" во втором варианте осуществления) в течение начального или первоначального периода T1 отклика, который составляет первый период, например, в 0,1 секунду. После истечения начального периода T1 отклика секция 56h регулировки усиления умножает величину δa управления обеспечением способности к прямолинейному движению на усиление контура управления, например, в "0,8" и доставляет произведение в сумматор 56e (эта операция является похожей на операцию задания усиления Ga контура управления равным "1" во втором варианте осуществления).
[0341] Вторая секция 56i регулировки усиления выполнена с возможностью умножать величину δa управления обеспечением способности к прямолинейному движению на усиление контура управления, например, в "1", чтобы обеспечивать достаточную способность к прямолинейному движению при езде по прямой вперед.
Усиление, заданное в первой и второй секциях 56h регулировки усиления и 56i, не ограничено диапазоном 0-1. Можно задавать усиление равным надлежащим значениям согласно характеристике устройства 1B подвески.
[0342] Пока операция руления рулевым колесом 2 продолжается, секция 56a определения начала руления в секции 56 управления задержкой не определяет начало руления из нейтрального состояния, следовательно, секция 56g выбора подает величину δa управления обеспечением способности к прямолинейному движению, вычисленную посредством секции SG обеспечения способности к прямолинейному движению, во вторую секцию 56i регулировки усиления. Следовательно, величина δa управления обеспечением способности к прямолинейному движению умножается на усиление контура управления в "1" и, как следствие, подается напрямую в сумматор 56e. Как результат, величина δa управления обеспечением способности к прямолинейному движению суммируется с целевым углом δ* поворота при выполнении руления, и управление обеспечением способности к прямолинейному движению выполняется надлежащим образом.
[0343] С другой стороны, когда начало руления из нейтрального состояния определяется посредством секции 56a определения начала руления, секция 56g выбора переключается на нормально разомкнутый неподвижный контактный вывод tb, и величина δa управления обеспечением способности к прямолинейному движению, вычисленная посредством секции SG обеспечения способности к прямолинейному движению, подается в секцию 56h регулировки усиления. Следовательно, секция 56h регулировки усиления прекращает вывод величины δa управления обеспечением способности к прямолинейному движению в сумматор 56e в течение начального периода T1 отклика (например, в 0,1 секунды). Следовательно, начало управления обеспечением способности к прямолинейному движению посредством величины δa управления обеспечением способности к прямолинейному движению для целевого угла δ* поворота при выполнении руления задерживается. После этого, секция 56h регулировки усиления задает усиление Ga контура управления равным "0,8" после истечения предварительно определенного периода времени и тем самым задает величину δa управления обеспечением способности к прямолинейному движению равным немного ограниченному значению. Такая заданная величина δa управления обеспечением способности к прямолинейному движению подается в сумматор 56e и суммируется с целевым углом δ* поворота при выполнении руления. Следовательно, система управления начинает управление обеспечением способности к прямолинейному движению для целевого угла δ* поворота при выполнении руления и предоставляет удовлетворительную характеристику отклика при выполнении руления при ограничении колебания или неустойчивости, сформированной в устройстве 1B подвески.
[0344] После этого, когда рулевое колесо 2 возвращается в нейтральную позицию, сигнал Sss датчика начала руления секции 56a определения начала руления переключается на деактивированное состояние. Следовательно, секция 56g выбора возвращает подвижный контактный вывод tc к нормально замкнутому неподвижному контактному выводу ta и подает величину δa управления обеспечением способности к прямолинейному движению из секции SG обеспечения способности к прямолинейному движению во вторую секцию 56i регулировки усиления. Следовательно, величина управления обеспечением способности к прямолинейному движению подается напрямую в сумматор 56e. Соответственно, система управления предпочтительно продолжает управление обеспечением способности к прямолинейному движению для целевого угла δ* поворота при выполнении руления.
[0345] Преимущества шестого варианта осуществления
Таким образом, также в шестом варианте осуществления во время начала руления, чтобы поворачивать рулевое колесо 2 вправо или влево из состояния поддержания нейтральной позиции, секция 56h регулировки усиления прекращает или предотвращает вывод величины δa управления обеспечением способности к прямолинейному движению в сумматор 56e, например, в течение начального или первоначального периода T1 отклика периода времени 0,1 секунд. Затем, после истечения начального периода T1 отклика, вывод величины δa управления обеспечением способности к прямолинейному движению в сумматор 56e начинается. Следовательно, можно получать преимущества и операции, аналогичные преимуществам и операциям первого варианта осуществления.
[0346] Кроме того, когда рулевое колесо 2 возвращается в нейтральную позицию, сигнал Sss датчика начала руления, выведенный из секции 56a определения начала руления, возвращается в деактивированное состояние. В этом состоянии, даже если подвижный контактный вывод tc секции 56g выбора возвращается к нормально замкнутому неподвижному контактному выводу ta, величина δa управления обеспечением способности к прямолинейному движению задается равной меньшему значению. Следовательно, величина управления обеспечением способности к прямолинейному движению не варьируется прерывисто, и управление изменяется плавно.
[0347] Пример разновидности шестого варианта осуществления
В практическом примере шестого варианта осуществления, в течение периода от определения состояния начала руления посредством секции 56a определения начала руления до следующего определения нейтрального состояния рулевого колеса 2, сигнал Sss датчика начала руления поддерживается в активированном состоянии. Тем не менее, настоящее изобретение не ограничено этой конфигурацией. Когда сигнал Sss датчика начала руления в импульсной форме формируется посредством секции 56a определения начала руления, после определения состояния начала руления, аналогично первому варианту осуществления, по своему усмотрению можно размещать, между секцией 56a определения начала руления и секцией 56g выбора, например, моностабильную схему, заданную в активированном состоянии, от момента времени определения начала руления до конца последнего периода T3 отклика. При этой конфигурации, в течение периода от начала руления до конца последнего периода T3 отклика, подвижный контактный вывод tc секции 56g выбора переключается к нормально разомкнутому неподвижному контактному выводу tb.
[0348] В примере шестого варианта осуществления устройство 50 управления выполнением руления реализуется посредством аппаратной конфигурации. Тем не менее, этот пример не является ограничивающим примером. Например, секция 51 вычисления целевого угла поворота при выполнении руления и секция SG обеспечения способности к прямолинейному движению могут формироваться посредством устройства обработки, такого как микрокомпьютер, и это устройство обработки, например, может быть выполнено с возможностью осуществлять процесс управления выполнением руления, как показано на фиг. 49.
[0349] В этом процессе управления выполнением руления, как показано на фиг. 49, во-первых, на этапе S21, устройство обработки считывает данные, требуемые для процесса вычисления, такие как скорость V транспортного средства, угол θs поворота при выполнении руления, считываемый посредством датчика 4 угла поворота при выполнении руления, движущие силы TL и TR левых и правых колес устройства 71 управления движущей силой и крутящий момент Ts поворота при выполнении руления, считываемый посредством датчика 5 крутящего момента поворота при выполнении руления. Затем, устройство обработки переходит к этапу S22 и анализирует то, поворачивается или нет рулевое колесо 2 из состояния поддержания нейтральной позиции влево или вправо, чтобы определять состояние начала руления, посредством анализа угла θs поворота при выполнении руления, считываемого посредством датчика 4 угла поворота при выполнении руления. От S22 устройство обработки переходит к этапу S23, когда состояние начала руления не определяется.
[0350] На этапе S23, устройство обработки анализирует то, задан или нет флаг F управления, представляющий состояние управления началом руления, равным "1". Когда флаг F управления сбрасывается до "0", устройство обработки переходит к этапу S24, задает усиление Ga контура управления равным "1" и затем переходит к этапу S25.
На этапе S25, устройство обработки вычисляет целевой угол δ* поворота при выполнении руления в соответствии со скоростью V транспортного средства и углом θs поворота при выполнении руления, идентично секции 51 вычисления целевого угла поворота при выполнении руления.
[0351] Затем, на этапе S26, аналогично секции 52 управления углом поворота при выполнении руления, устройство обработки вычисляет варьирования Δfl и Δfr угла поворота при выполнении руления управляемых колес 17FL и 17FR вследствие подруливания за счет податливости посредством умножения движущей силы TL левых колес и движущей силы TR правых колес на коэффициент af подруливания за счет податливости и вычисляет величину или значение Ac управления подруливанием за счет податливости из этих вычисленных варьирований.
[0352] Затем, на этапе S27, аналогично секции 53 дополнения способности к прямолинейному движению, на основе разности ΔT движущих сил (=TL-TR) между движущими силами TL и TR левых и правых колес устройство обработки оценивает сформированный крутящий момент Th, сформированный посредством явления паразитного подруливания за счет крутящего момента во время операции выполнения руления, посредством поиска в карте управления для оценки сформированного крутящего момента, показанной на фиг. 18. Затем, устройство обработки вычисляет стабилизирующий крутящий момент Tsa посредством вычитания сформированного крутящего момента Th из крутящего момента Ts поворота при выполнении руления и вычисляет величину или значение Asa управления стабилизирующим крутящим моментом посредством умножения вычисленного стабилизирующего крутящего момента Tsa на предварительно определенное усиление Ksa.
[0353] Затем, на этапе S28, устройство обработки вычисляет величину Adis компенсации возмущений в соответствии с углом поворота электромотора θmo актуатора 8 рулевого управления, током imr электромотора, считываемым посредством секции 61 считывания тока электромотора, и крутящим моментом Ts поворота при выполнении руления, идентично секции 54 компенсации возмущений.
Затем, на этапе S29, устройство обработки вычисляет целевой угол δ*a поворота при выполнении руления после суммирования посредством суммирования согласно следующему уравнению (4) целевого угла δ* поворота при выполнении руления и произведения между усилением Ga контура управления и суммой величины Ac управления подруливанием за счет податливости, величины Asa управления стабилизирующим крутящим моментом и величины Adis компенсации возмущений.
δ*a=δ*+Ga (Ac+Asa+Adis) (4)
[0354] Затем, на этапе S30, устройство обработки доставляет целевой угол δ*a поворота при выполнении руления после суммирования в секцию 58 вычисления отклонения угла поворота при выполнении руления, показанную на фиг. 48. После этого, устройство обработки возвращается к этапу S21.
Когда заключение этапа S22 указывает определение состояния начала руления, устройство обработки переходит к этапу S31 и задает флаг F управления равным "1". От S31 устройство обработки переходит к этапу S32. Когда заключение этапа S23 состоит в том, что флаг F управления задается равным "1", то устройство обработки переходит непосредственно к этапу S32.
[0355] На этом этапе S32, устройство обработки анализирует, истекло ли или нет предварительно определенное время задержки (например, в 0,1 секунды). Когда предварительно определенное время задержки еще не истекло, устройство обработки переходит к этапу S33 и задает усиление Ga контура управления равным "0". От S33 секция обработки переходит к этапу S25.
Когда заключение этапа S32 указывает истечение предварительно определенного времени задержки, устройство обработки переходит к этапу S34 и регулирует усиление Ga до "0,8". От S34 устройство обработки переходит к этапу S35.
[0356] На этапе S35, устройство обработки анализирует то, находится или нет угол θs поворота при выполнении руления, считываемый посредством датчика 4 угла поворота при выполнении руления, в состоянии, представляющем нейтральную позицию рулевого колеса 2. Заключение этапа S35 является нейтральной позицией, устройство обработки переходит к этапу S36 и сбрасывает флаг управления до "0". После S36 устройство обработки переходит к этапу S25.
Кроме того, с помощью процесса управления выполнением руления, показанного на фиг. 49, при отсутствии состояния начала руления в начале поворота рулевого колеса 2 влево или вправо из нейтральной позиции, система управления задает усиление контура управления равным "1", следовательно, выполняет управление обеспечением способности к прямолинейному движению, чтобы суммировать, с целевым углом δ* поворота при выполнении руления, величину δa управления обеспечением способности к прямолинейному движению, полученную посредством суммирования величины Ac управления подруливанием за счет податливости, величины Asa управления стабилизирующим крутящим моментом и величины Adis компенсации возмущений, и тем самым обеспечивает способность к прямолинейному движению устройства 1B подвески.
[0357] В случае состояния начала руления в начале поворота рулевого колеса 2 влево или вправо из нейтральной позиции, усиление Ga контура управления задается равным "0" до истечения предварительно определенного времени задержки. Следовательно, только целевой угол δ* поворота при выполнении руления выводится в секцию 58 вычисления отклонения угла поворота при выполнении руления, и электромотор 8a рулевого управления актуатора 8 рулевого управления приводится в действие в соответствии с целевым углом δ* поворота при выполнении руления. Следовательно, первоначальная или начальная чувствительность при выполнении руления, по сути, задается на уровне высокой чувствительности при выполнении руления устройства подвески, и система может предоставлять высокую чувствительность при выполнении руления.
[0358] После истечения времени задержки усиление Ga контура управления задается равным "0,8", и вращение электромотора 8a рулевого управления актуатора 8 рулевого управления управляется в соответствии с целевым углом δ*a поворота при выполнении руления после суммирования посредством суммирования, с целевым углом δ* поворота при выполнении руления, произведения между усилением Ga контура управления и величиной δa управления обеспечением способности к прямолинейному движению, включающей в себя величину Ac управления подруливанием за счет податливости, величину Asa управления стабилизирующим крутящим моментом и величину Adis компенсации возмущений. Следовательно, высокая чувствительность отклика устройства подвески ограничивается посредством управления обеспечением способности к прямолинейному движению системы SBW рулевого управления по проводам, и характеристика отклика при выполнении руления задается в идеальной форме, как показано посредством характеристической линии L1 на фиг. 20(a).
[0359] В процессе по фиг. 49, этап S25 соответствует секции 51 вычисления целевого угла поворота при выполнении руления, этап S26 соответствует секции 52 управления углом поворота при выполнении руления, этап S27 соответствует секции 53 дополнения способности к прямолинейному движению, этап S28 соответствует секции 54 компенсации возмущений, этапы S24-S28 и S25-S29 соответствуют секции SG обеспечения способности к прямолинейному движению, этапы S22, S23, S31-S33 и S29 соответствуют секции 56 управления задержкой, и этапы S21-S37 соответствуют секции SRS задания чувствительности при выполнении руления.
[0360] Седьмой вариант осуществления
Седьмой вариант осуществления настоящего изобретения поясняется далее со ссылкой на фиг. 50-53.
В седьмом варианте осуществления время τ задержки для того, чтобы начинать управление обеспечением способности к прямолинейному движению, является переменным.
Как показано на фиг. 50, в седьмом варианте осуществления, схема 56m задания времени задержки предоставляется в секции 56 управления задержкой. Время τ задержки, заданное в схеме 56m задания времени задержки, подается в моностабильную схему 56b, которая задает ширину импульса, соответствующую времени τ задержки.
[0361] Схема 56m задания времени задержки включает в себя секцию 56n вычисления угловой скорости руления, секцию 56o вычисления первого времени задержки, секцию 56p вычисления второго времени задержки и сумматор 56q, как показано на фиг. 50.
Секция 56n вычисления угловой скорости руления принимает угол θs поворота при выполнении руления рулевого колеса 2, считываемый посредством датчика 4 угла поворота при выполнении руления, и вычисляет угловую скорость или угловую быстроту θsv руления посредством различения угла θs поворота при выполнении руления.
[0362] Секция 56o вычисления первого времени задержки вычисляет первое время τ1 задержки из угловой скорости θsv руления, введенной из секции 56n вычисления угловой скорости руления, посредством использования карты вычисления первого времени задержки, показанной на фиг. 51. Как показано на фиг. 51, карта вычисления первого времени задержки включает в себя характеристическую кривую L31 в форме гиперболической кривой, чтобы задавать первое время τ1 задержки, равное минимальному времени τmin1 задержки (например, в 0,04 секунды), в диапазоне угловых скоростей руления для угловой скорости θsv руления от 0 до предварительно определенного значения θsv1 угловой скорости и увеличивать первое время τ1 задержки до максимального времени τmax1 задержки (например, в 0,06 секунды) с увеличением угловой скорости θsv руления, когда угловая скорость θsv руления увеличивается за пределы предварительно определенного значения θsv1.
[0363] Секция 56p вычисления второго времени задержки принимает скорость V транспортного средства, определенную посредством секции 21 получения параметров транспортного средства, и вычисляет второе время τ2 задержки из скорости V транспортного средства посредством использования карты вычисления второго времени задержки, показанной на фиг. 52. Как показано на фиг. 52, карта вычисления второго времени задержки включает в себя характеристическую кривую L32. Характеристическая кривая L32 включает в себя: сегмент L32a линии, чтобы поддерживать второе время τ2 задержки равным максимальному времени τx2 задержки (например, в 0,07 секунды) в диапазоне низких скоростей транспортного средства, в котором скорость V транспортного средства составляет от 0 до предварительно установленного значения V1 скорости транспортного средства; сегмент L32b прямой линии, чтобы увеличивать второе время τ2 задержки пропорционально величине увеличения скорости транспортного средства в диапазоне скоростей транспортного средства, в котором скорость V транспортного средства увеличивается за пределы предварительно установленного значения V1 скорости транспортного средства; и сегмент L32c линии, чтобы поддерживать второе время τ2 задержки равным минимальному времени τmin2 задержки (например, в 0,03 секунды) в диапазоне скоростей транспортного средства, в котором скорость V транспортного средства выше или равна предварительно установленному значению V2 скорости транспортного средства, большему предварительно установленного значения V1 скорости транспортного средства.
[0364] Сумматор 56q вычисляет время τ (τ1+τ2) задержки посредством суммирования первого времени τ1 задержки, вычисленного в секции 56o вычисления первого времени задержки, и второго времени τ2 задержки, вычисленного в секции 56p вычисления второго времени задержки, и подает время τ задержки в моностабильную схему 56b.
Моностабильная схема 56b формирует импульсный сигнал, который переключается на активированное состояние посредством инициирования посредством сигнала определения начала руления, введенного из секции 56a определения начала руления, и который поддерживается в активированном состоянии в течение периода, соответствующего времени τ задержки, введенному из сумматора 56q, подает этот импульсный сигнал в секцию 56c регулировки усиления.
[0365] В седьмом варианте осуществления первое время 1 задержки в зависимости от угловой скорости θsv руления задается небольшим в состоянии медленного руления, в котором угловая скорость θsv руления является небольшой, и задается большим в состоянии быстрого руления, как показано на фиг. 51. Второе время 2 задержки в зависимости от скорости V транспортного средства задается большим, когда скорость V транспортного средства является низкой, и задается небольшим, когда скорость V транспортного средства является высокой, как показано на фиг. 52.
[0366] Время τ задержки определяется посредством суммирования первого и второго времен τ1 и τ2 задержки в сумматоре 56q.
Следовательно, как показано на фиг. 53, в области низких скоростей транспортного средства, в которой скорость V транспортного средства является низкой, время τ задержки равно минимальному значению 0,11 секунды, когда скорость θsv руления является небольшой, и время τ задержки увеличивается до максимального времени задержки в 0,13 секунды с увеличением угловой скорости θsv руления.
[0367] В области средних скоростей транспортного средства для скорости V транспортного средства время τ задержки равно минимальному значению 0,09 секунды, когда скорость θsv руления является небольшой, и время τ задержки увеличивается до максимального времени задержки в 0,11 секунды с увеличением угловой скорости θsv руления.
В области высоких скоростей транспортного средства для скорости V транспортного средства время τ задержки равно минимальному значению 0,07 секунды, когда скорость θsv руления является небольшой, и время τ задержки увеличивается до максимального времени задержки в 0,09 секунды с увеличением угловой скорости θsv руления.
[0368] Следовательно, в области низких скоростей транспортного средства, в которой скорость V транспортного средства является низкой, время τ задержки, в общем, является большим и находится в диапазоне ±0,01 секунды по обеим сторонам от центра времени задержки τ=0,12. В области средних скоростей транспортного средства время τ задержки находится в диапазоне ±0,01 секунды по обеим сторонам от центра времени задержки τ=0,10, как задано в первом и шестом вариантах осуществления. В области высоких скоростей транспортного средства время τ задержки находится в диапазоне ±0,01 секунды по обеим сторонам от центра времени задержки τ=0,08.
[0369] Следовательно, начало управления обеспечением способности к прямолинейному движению задерживается в области низких скоростей транспортного средства, и, как следствие, можно получать состояние активного руления с характеристикой очень быстрого отклика при выполнении руления устройства 1B подвески. В области средних скоростей транспортного средства управление обеспечением способности к прямолинейному движению начинается в среднем диапазоне времени, и, как следствие, можно получать состояние руления для соответствующего отклика при выполнении руления. В области высоких скоростей транспортного средства управление обеспечением способности к прямолинейному движению начинается раньше, и, как следствие, можно получать состояние стабильного руления с характеристикой очень быстрого отклика при выполнении руления устройства 1B подвески, ограниченной раньше.
[0370] В примере седьмого варианта осуществления устройство 50 управления выполнением руления реализуется посредством аппаратной конфигурации. Тем не менее, этот пример не является ограничивающим примером. Например, секция 51 вычисления целевого угла поворота при выполнении руления и секция SRS задания чувствительности при выполнении руления могут формироваться посредством устройства обработки, такого как микрокомпьютер, и это устройство обработки, например, может быть выполнено с возможностью осуществлять процесс управления выполнением руления, как показано на фиг. 54.
Этот процесс управления углом поворота при выполнении руления является идентичным процессу управления углом поворота при выполнении руления по фиг. 21 за исключением введения, между этапом S2 и этапом S11, этапа S16 вычисления угловой скорости θsv руления, этапа S17 вычисления первого времени τ1 задержки, этапа S18 вычисления второго времени τ2 задержки и этапа S19 вычисления времени τ задержки.
[0371] На этапе S16, устройство обработки вычисляет угловую скорость или угловую быстроту θsv руления посредством различения угла θs поворота при выполнении руления, считанного на этапе S1. На этапе S17, устройство обработки вычисляет первое время τ1 задержки из угловой скорости θsv руления, вычисленной на этапе S16, посредством поиска в карте вычисления первого времени задержки, показанной по фиг. 51, сохраненной в запоминающем устройстве, таком как ROM. На этапе S18, устройство обработки вычисляет второе время τ2 задержки из скорости V транспортного средства, считанной на этапе S1, посредством поиска в карте вычисления второго времени задержки по фиг. 52, сохраненной в запоминающем устройстве, таком как ROM. На этапе S19, устройство обработки вычисляет время τ задержки (=τ1+τ2) посредством суммирования первого времени τ1 задержки, вычисленного на этапе S17, и второго времени τ2 задержки, вычисленного на этапе S18.
[0372] После этапа S11, устройство обработки переходит к этапу S12. На этом этапе S12, устройство обработки анализирует то, истекло или нет предварительно определенное время τ задержки, вычисленное на этапе S18. Когда предварительно определенное время задержки еще не истекло, устройство обработки задает усиление Ga контура управления равным "0". Когда предварительно определенное время задержки истекло, устройство обработки задает усиление Ga контура управления равным "1". Таким образом, система управления может задерживать процесс управления углом поворота при выполнении руления на время τ задержки.
[0373] В процессе управления углом поворота при выполнении руления по фиг. 54, аналогично фиг. 50 седьмого варианта осуществления, после определения состояния начала руления устройство обработки вычисляет первое время τ1 задержки из угловой скорости θsv руления, вычисляет второе время τ2 задержки из скорости V транспортного средства и вычисляет время τ задержки посредством суммирования первого и второго времен задержки.
Затем, система управления определяет усиление Ga контура управления в соответствии с вычисленным временем τ задержки. Следовательно, система управления может определять оптимальное время τ задержки, подходящее для состояния руления, в соответствии со скоростью V транспортного средства и угловой скоростью θsv руления, аналогично седьмому варианту осуществления.
[0374] Следовательно, начало управления обеспечением способности к прямолинейному движению задерживается в области низких скоростей транспортного средства, и, как следствие, можно получать состояние активного руления с характеристикой очень быстрого отклика при выполнении руления устройства 1B подвески. В области средних скоростей транспортного средства управление обеспечением способности к прямолинейному движению начинается в среднем диапазоне времени, и, как следствие, можно получать состояние руления для соответствующего отклика при выполнении руления. В области высоких скоростей транспортного средства управление обеспечением способности к прямолинейному движению начинается раньше, и, как следствие, можно получать состояние стабильного руления с характеристикой очень быстрого отклика при выполнении руления устройства 1B подвески, ограниченной раньше.
[0375] Преимущества седьмого варианта осуществления
(1) Предусмотрены секция вычисления первого времени задержки для того, чтобы вычислять первое время τ1 задержки из угловой скорости θsv руления, секция вычисления второго времени задержки для того, чтобы вычислять второе время τ2 задержки из скорости V транспортного средства, и сумматор, чтобы вычислять время τ задержки для того, чтобы начинать управление обеспечением способности к прямолинейному движению посредством суммирования первого и второго времен задержки.
Следовательно, система управления может определять первое время τ1 задержки в зависимости от угловой скорости θsv руления и второе время τ2 задержки в зависимости от скорости V транспортного средства отдельно и, как следствие, определять оптимальное время задержки, подходящее для различных состояний руления.
[0376] (2) Секция вычисления первого времени задержки вычисляет первое время задержки, например, из угловой скорости руления посредством использования карты вычисления первого времени задержки, имеющей характеристику снижения первого времени задержки с увеличением угловой скорости θsv руления.
Следовательно, система управления может предоставлять характеристику стабильного руления посредством сокращения первого времени задержки и, вследствие этого, начала управления обеспечением способности к прямолинейному движению раньше в состоянии медленного руления, в котором скорость θsv руления является небольшой, и предоставлять характеристику активного руления посредством продления первого времени задержки и, вследствие этого, задержки начала управления обеспечением способности к прямолинейному движению в состоянии быстрого руления, в котором скорость θsv руления является большой.
[0377] (3) Секция вычисления второго времени задержки вычисляет второе время задержки из скорости транспортного средства посредством использования карты вычисления второго времени задержки, имеющей характеристику, увеличивающую второе время задержки с увеличением скорости V транспортного средства.
Следовательно, система управления может предоставлять характеристику активного руления в области низких скоростей транспортного средства, в которой скорость V транспортного средства является низкой, и предоставлять характеристику стабильного руления в области высоких скоростей транспортного средства, в которой скорость V транспортного средства является высокой.
[0378] Пример 1 варианта применения седьмого варианта осуществления
В примере седьмого варианта осуществления секция 56m вычисления времени задержки вычисляет время τ задержки для начала управления обеспечением способности к прямолинейному движению как из скорости θsv руления, так и из скорости V транспортного средства. Тем не менее, настоящее изобретение не ограничено этой конфигурацией. Как показано на фиг. 55, по своему усмотрению можно опускать секцию 56p вычисления второго времени задержки и сумматор 56q и задавать время τ задержки только посредством секции 56o вычисления первого времени задержки, задающей первое время τ1 задержки из скорости θsv руления.
Преимущество
В этом случае, система управления может задавать оптимальную характеристику отклика при выполнении руления в соответствии со скоростью θsv руления безотносительно скорости V транспортного средства.
[0379] Пример 2 варианта применения седьмого варианта осуществления
Кроме того, как показано на фиг. 56, по своему усмотрению можно конфигурировать секцию 56m вычисления времени задержки посредством опускания секции 56o вычисления первого времени задержки и сумматора 56q и задавать время τ задержки только посредством секции 56p вычисления второго времени задержки, задающей второе время τ2 задержки из скорости V транспортного средства.
Преимущество
В этом случае, система управления может задавать оптимальную характеристику отклика при выполнении руления в соответствии со скоростью V транспортного средства безотносительно скорости θsv руления.
[0380] Пример 3 варианта применения седьмого варианта осуществления
Кроме того, как показано на фиг. 57, по своему усмотрению можно конфигурировать секцию 56m вычисления времени задержки посредством предоставления секции 56r выбора времени задержки, выбирающей одно из времен задержки секции 56o вычисления первого времени задержки, секции 56p вычисления второго времени задержки и сумматора 56q.
Преимущество
В этом случае, система управления может выбирать время задержки в соответствии с предпочтениями водителя с помощью секции 56r выбора времени задержки.
[0381] Пример разновидности седьмого варианта осуществления
В примере седьмого варианта осуществления сумматор 56q вычисляет время τ задержки посредством суммирования первого и второго времен τ1 и τ2 задержки. Тем не менее, изобретение не ограничено этой конфигурацией. По своему усмотрению можно вычислять время τ задержки посредством умножения первого и второго времен τ1 и τ2 задержки. В этом случае, можно задавать второе время задержки, вычисленное в зависимости от скорости V транспортного средства, в качестве усиления задержки и задавать усиление задержки в рамках диапазона 0,7-1,0 в соответствии со скоростью V транспортного средства.
[0382] Пример разновидности первого, шестого и седьмого вариантов осуществления
В примерах, поясненных в первом, шестом и седьмом вариантах осуществления, управление обеспечением способности к прямолинейному движению для суммирования величины δa управления обеспечением способности к прямолинейному движению с целевым углом δ* поворота при выполнении руления прекращается во время начала операции руления влево или вправо из состояния поддержания нейтральной позиции рулевого колеса 2. Тем не менее, настоящее изобретение не ограничено этой конфигурацией. Как показано на фиг. 58, по своему усмотрению можно выполнять процесс регулирования чувствительности при выполнении руления для регулирования чувствительности при выполнении руления посредством использования частоты руления для определения того, следует или нет выполнять управление обеспечением способности к прямолинейному движению, чтобы суммировать величину управления с целевым углом δ* поворота при выполнении руления.
[0383] Фиг. 58 показывает этот процесс регулирования чувствительности при выполнении руления. На этапе S41, устройство обработки считывает данные, требуемые для процесса вычисления, такие как скорость V транспортного средства, угол θs поворота при выполнении руления, угол θmo поворота и движущие силы TL и TR левых и правых колес. Затем, устройство обработки переходит к этапу S42 и считывает частоту F руления посредством использования угла θs поворота при выполнении руления, выведенного из датчика 4 угла поворота при выполнении руления. Затем, на этапе S43, устройство обработки определяет то, выше или нет считываемая частота F руления предварительно определенного порогового значения Fth частоты (например, 2 Гц).
[0384] Когда заключение этапа S43 состоит в том, что F≥Fth, устройство обработки определяет то, что требуется высокая чувствительность при выполнении руления, и переходит к этапу S44. На этапе S44 устройство обработки вычисляет целевой угол δ* поворота при выполнении руления и затем переходит к этапу S45. На этапе S45 устройство обработки выводит вычисленный целевой угол δ* поворота при выполнении руления в вышеуказанную секцию 58 вычисления отклонения угла поворота при выполнении руления, показанную на фиг. 17, и затем возвращается к этапу S41.
Когда заключение этапа S43 состоит в том, что F<Fth, устройство обработки определяет то, что высокая чувствительность при выполнении руления не требуется, а стабильность руления требуется, и переходит к этапу S46. На этапе S46 устройство обработки вычисляет целевой угол δ* поворота при выполнении руления и затем переходит к этапу S47. Устройство обработки вычисляет величину Ac управления подруливанием за счет податливости на этапе S47 и затем вычисляет величину Asc управления стабилизирующим крутящим моментом на следующем этапе S48.
[0385] Затем, на этапе S49, устройство обработки вычисляет величину Adis компенсации возмущений. Затем, устройство обработки вычисляет целевой угол δ*a поворота при выполнении руления после суммирования на этапе S50, посредством суммирования вычисленного целевого угла δ* поворота при выполнении руления, величины Ac управления подруливанием за счет податливости, величины Asa управления стабилизирующим крутящим моментом и величины Adis компенсации возмущений. Затем, на этапе S51, устройство обработки выводит целевой угол δa* поворота при выполнении руления после суммирования в секцию 58 вычисления отклонения угла поворота при выполнении руления, показанную на фиг. 17, и затем возвращается к этапу S41.
[0386] Преимущества
В этом процессе регулирования чувствительности при выполнении руления, когда частота F руления рулевого колеса 2 ниже порогового значения Fth частоты, система управления может определять, что стабильность руления требуется вместо высокой чувствительности, выполнять управление выполнением руления посредством использования целевого угла δ*a поворота при выполнении руления после суммирования, получаемого в результате суммирования величины δa управления обеспечением способности к прямолинейному движению с целевым углом δ* поворота при выполнении руления, и тем самым управлять углом поворота при выполнении руления удовлетворительно. Когда частота F руления выше порогового значения Fth частоты руления, система управления может определять, что требуется высокая чувствительность, и, по сути, выполнять управление выполнением руления с помощью чувствительности при выполнении руления устройства 1B подвески.
[0387] В этом примере, система управления анализирует частоту руления и тем самым определяет то, следует или нет модифицировать целевой угол δ* поворота при выполнении руления. Следовательно, система управления может задавать отклик при выполнении руления равным оптимальной характеристике, подходящей для состояния руления. В этом случае, когда F<Fth, посредством умножения усиления, заданного в диапазоне между 0-1 в соответствии с частотой F руления, на величину δa управления обеспечением способности к прямолинейному движению, система управления может варьировать степень коррекции способности к прямолинейному движению и точно управлять чувствительностью.
Настоящее изобретение является применимым не только к моторным транспортным средствам, но также и к другим транспортным средствам, имеющим устройство рулевого управления.
Перечень ссылочных позиций
[0388] 1 - моторное транспортное средство, 1A - кузов транспортного средства, 1B - устройство подвески, 2 - рулевое колесо, 3 - входной рулевой вал, 4 - датчик угла поворота при выполнении руления, 5 - датчик крутящего момента поворота при выполнении руления, 6 - актуатор реакции при выполнении руления, 7 - датчик угла поворота актуатора реакции при выполнении руления, 8 - актуатор рулевого управления, 9 - датчик угла поворота актуатора рулевого управления, 10 - выходной рулевой вал, 11 - датчик крутящего момента поворота при выполнении руления, 12 - ведущая шестерня, 13 - датчик угла поворота ведущей шестерни, 14 - вал зубчатой рейки (рулевая зубчатая рейка), 15 - поперечная рулевая тяга(и), 17FR, 17FL, 17RR, 17RL - колеса, 21 - секция получения параметров транспортного средства, 24FR, 24FL, 24RR, 24RL - датчики скорости вращения колес, 26 - схема приведения в действие, 27 - механическое дублирующее средство, 32 - полуось, 33 - стакан полуоси, 34 - пружинный элемент, 37 - первая тяга (первый элемент тяги), 38 - вторая тяга (второй элемент тяги), 40 - амортизатор, 137 - поперечная тяга (первый элемент тяги, элемент поперечной тяги), 138 - работающая на сжатие тяга (второй элемент тяги, элемент работающей на сжатие тяги), 237 - поперечная тяга (первый элемент тяги, элемент поперечной тяги), 238 - работающая на растяжение тяга (второй элемент тяги, элемент работающей на растяжение тяги), 337 - поперечная тяга (первый элемент тяги, элемент поперечной тяги), 338 - работающая на сжатие тяга (второй элемент тяги, элемент работающей на сжатие тяги), 437 - поперечная тяга (первый элемент тяги, элемент поперечной тяги), 438 - работающая на растяжение тяга (второй элемент тяги, элемент работающей на растяжение тяги), 50 - секция управления выполнением руления, 51 - секция вычисления целевого угла поворота при выполнении руления, 52 - секция управления углом поворота при выполнении руления, 53 - секция дополнения способности к прямолинейному движению, 54 - секция компенсации возмущений, 55 - сумматор, 56 - секция управления задержкой, 56a - секция определения начала руления, 56b - моностабильная схема, 56c - секция регулировки усиления, 56d - умножитель, 56e - сумматор, 56g - секция выбора, 56h - секция регулировки усиления, 56m - секция вычисления времени задержки, 56n - секция вычисления угловой скорости руления, 56o - секция вычисления первого времени задержки, 56p - секция вычисления второго времени задержки, 56q - сумматор, 56r - секция выбора времени задержки, 57 - сумматор, 58 - секция вычисления отклонения угла поворота при выполнении руления, 59 - секция управления электромотором рулевого управления, 60 - секция вычисления отклонения тока, 61 - секция считывания тока электромотора, 62 - секция управления током электромотора, 63 - секция управления актуатором, 111 - секция обеспечения способности к прямолинейному движению.
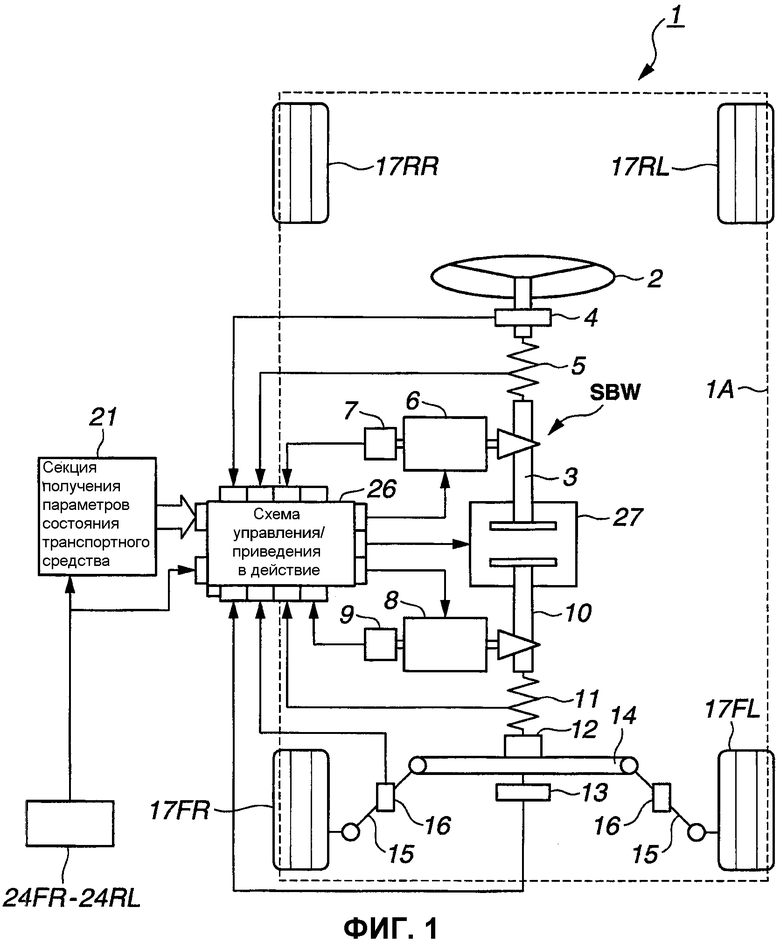
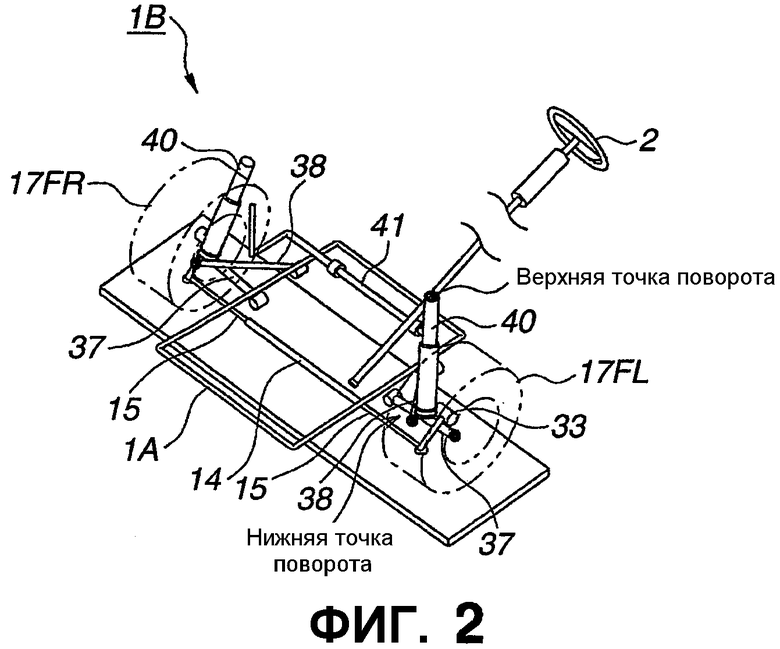
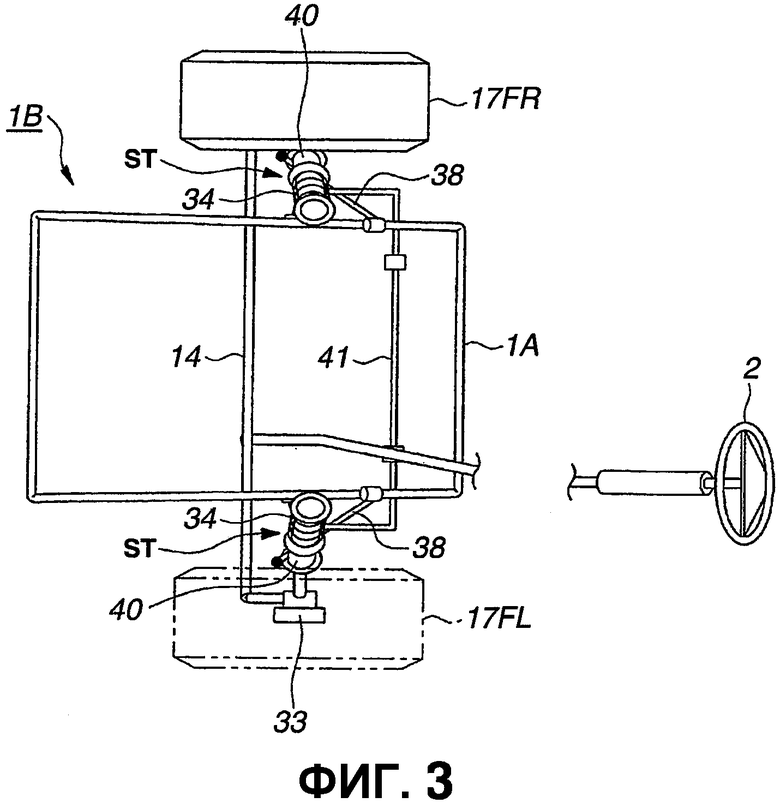
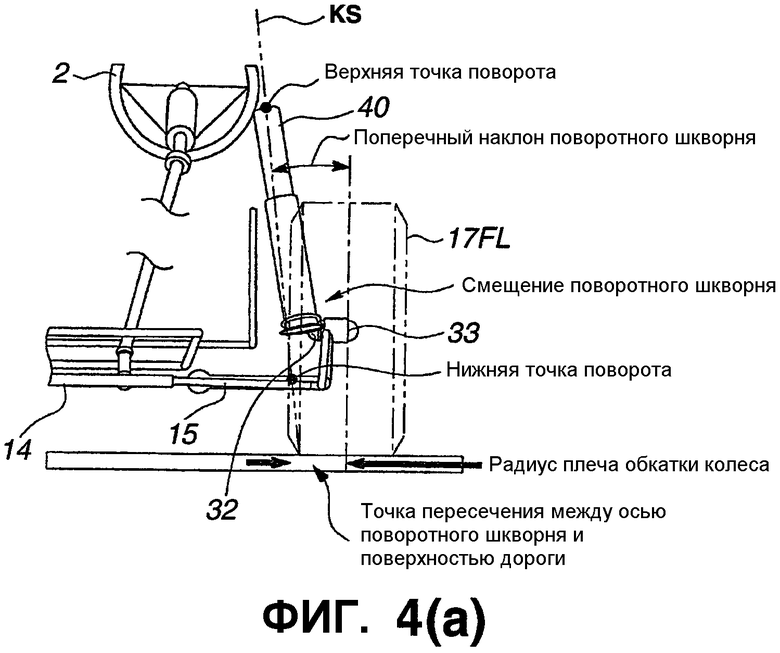

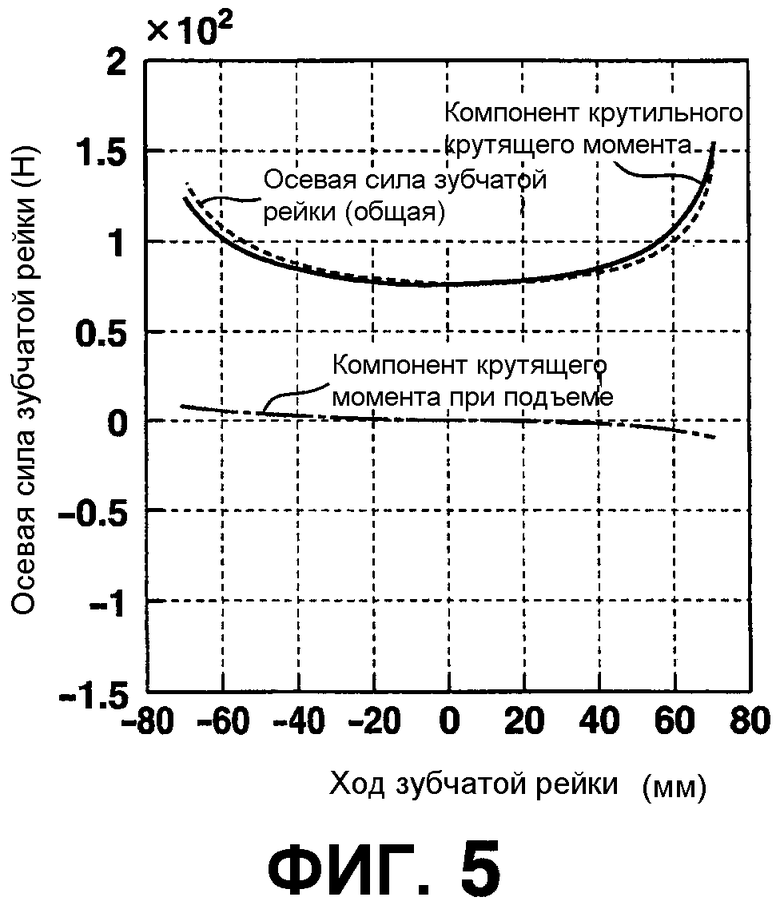
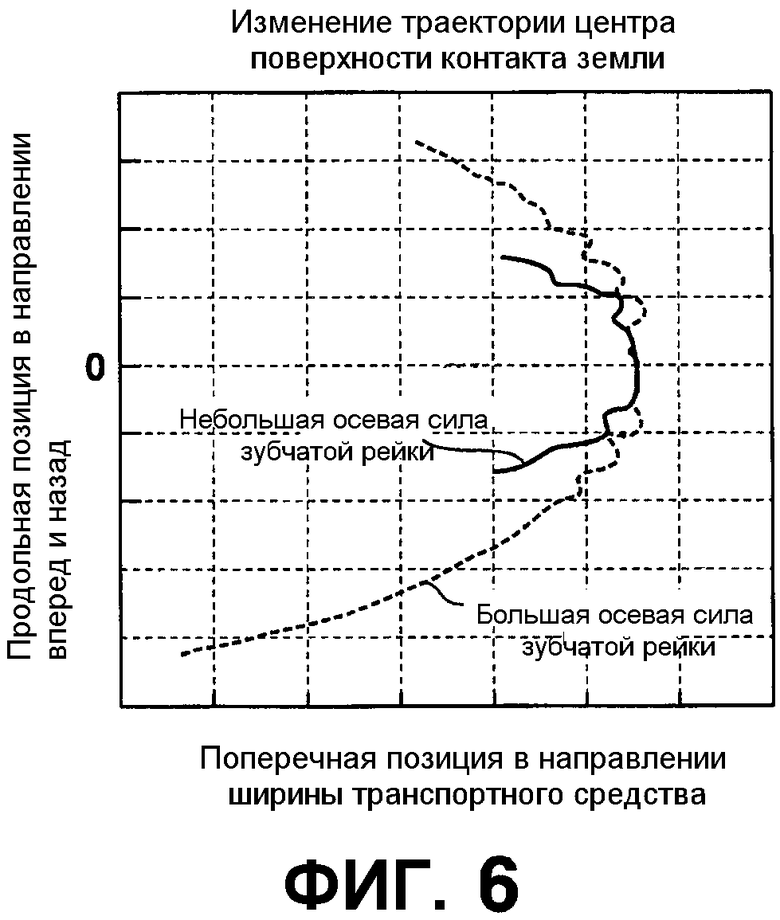

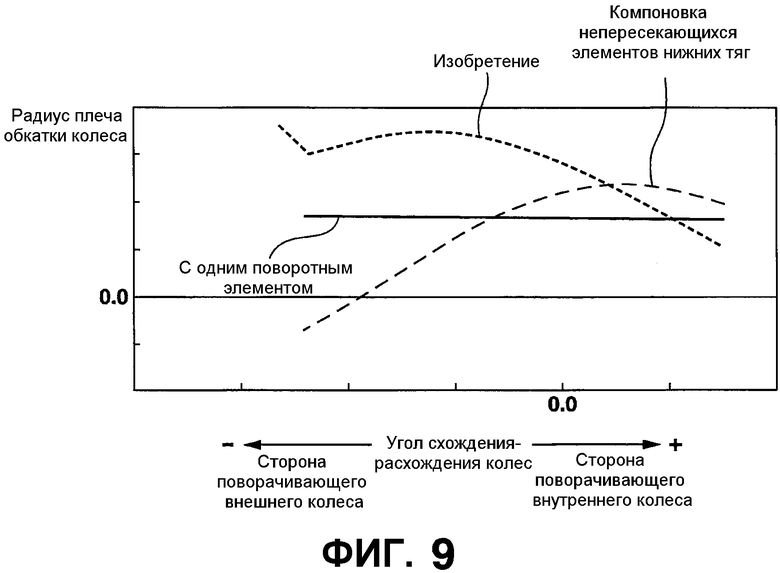
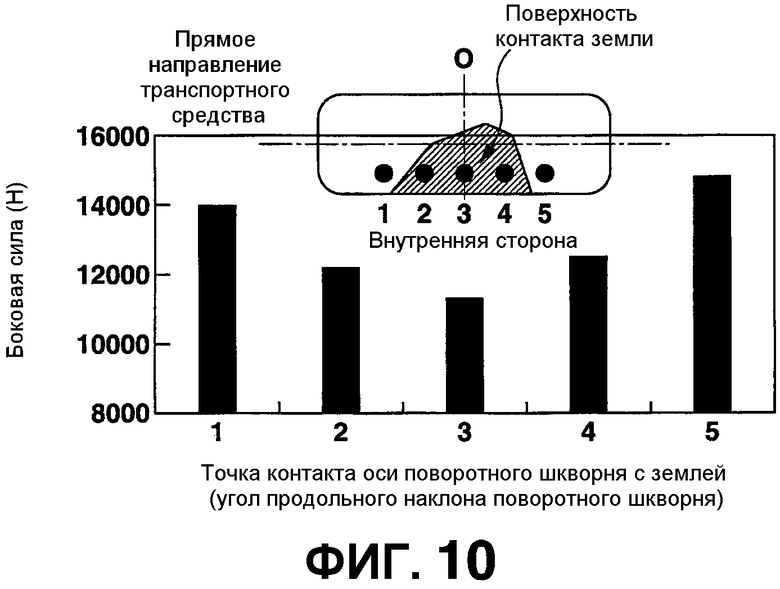
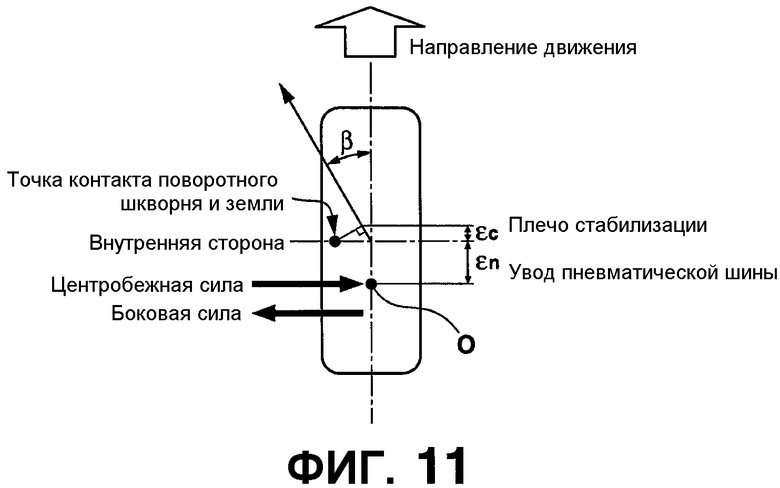
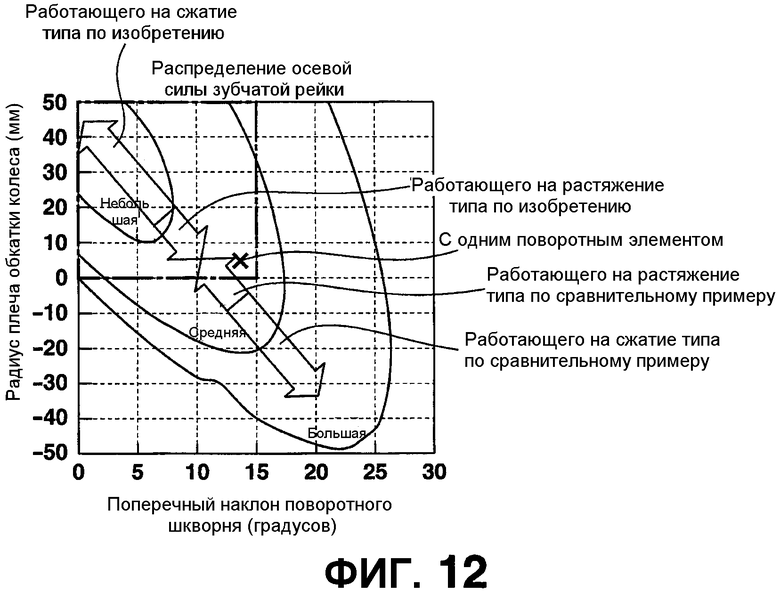
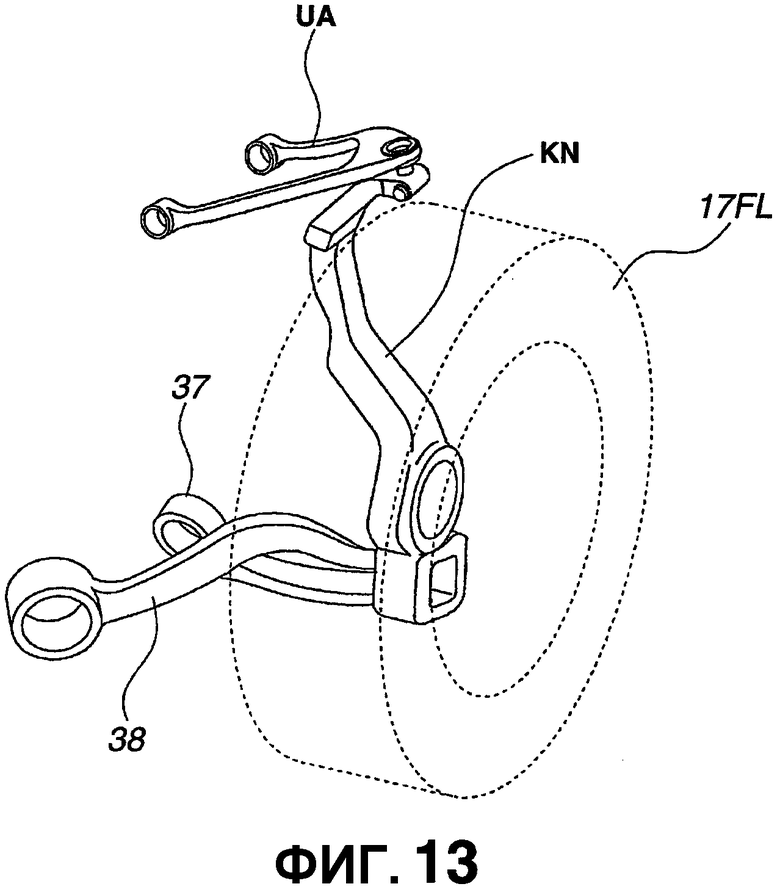
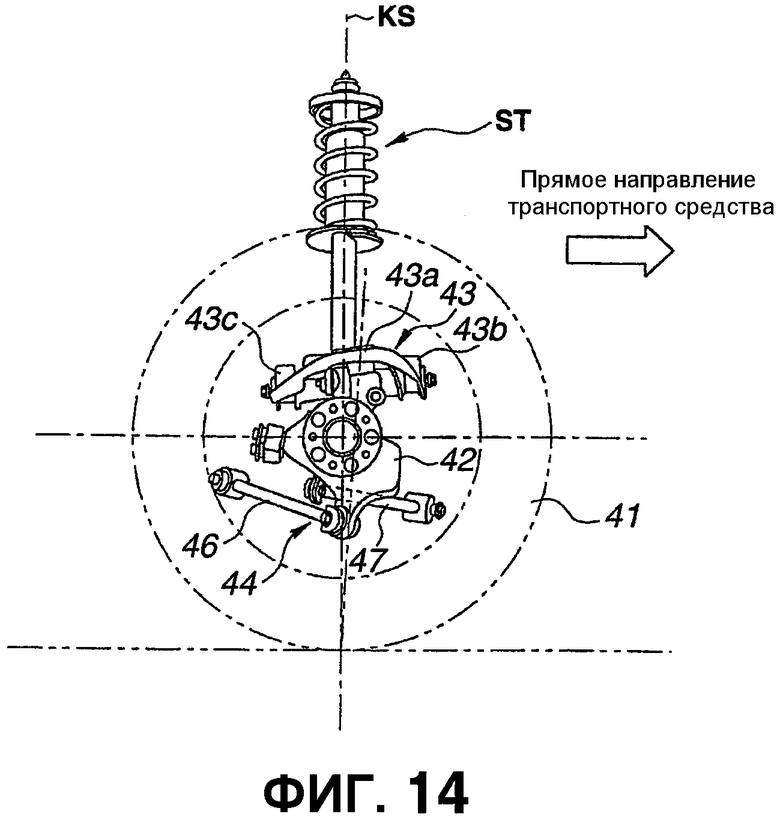
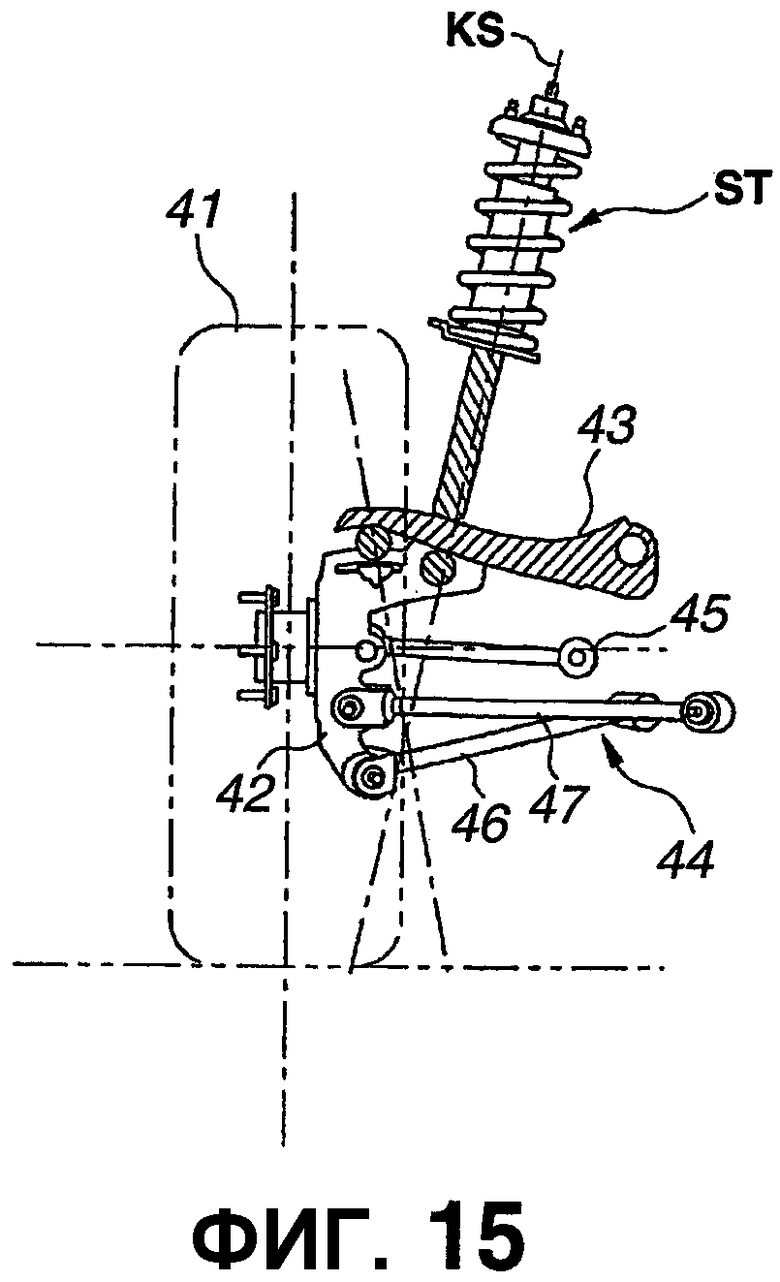
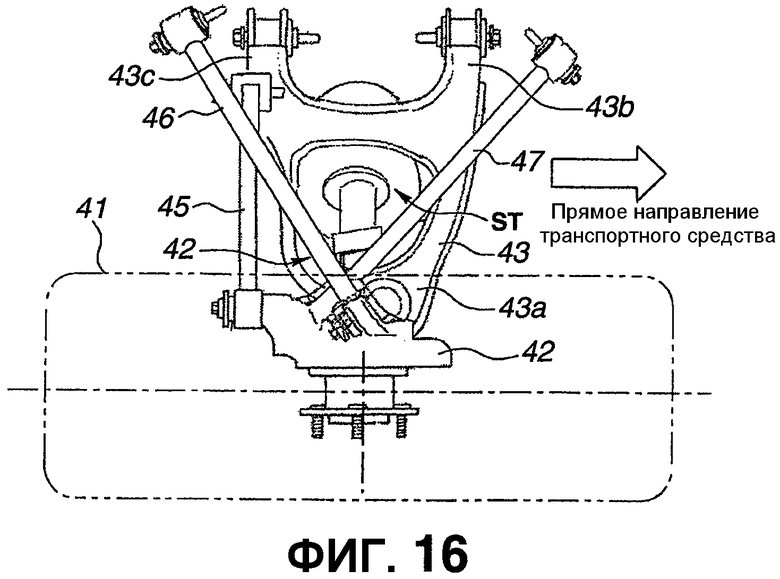
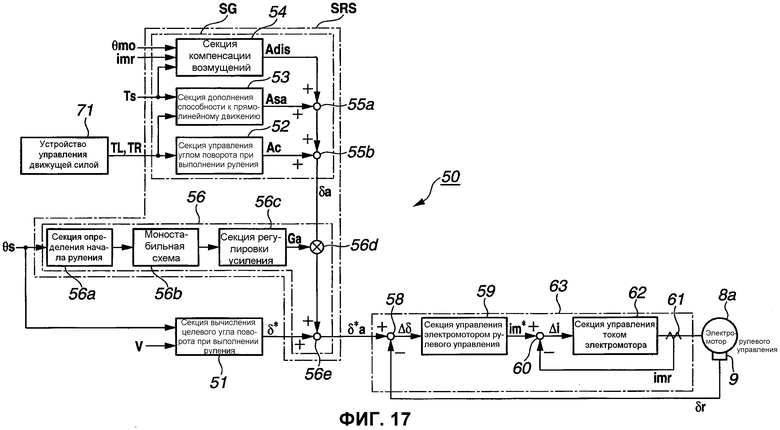
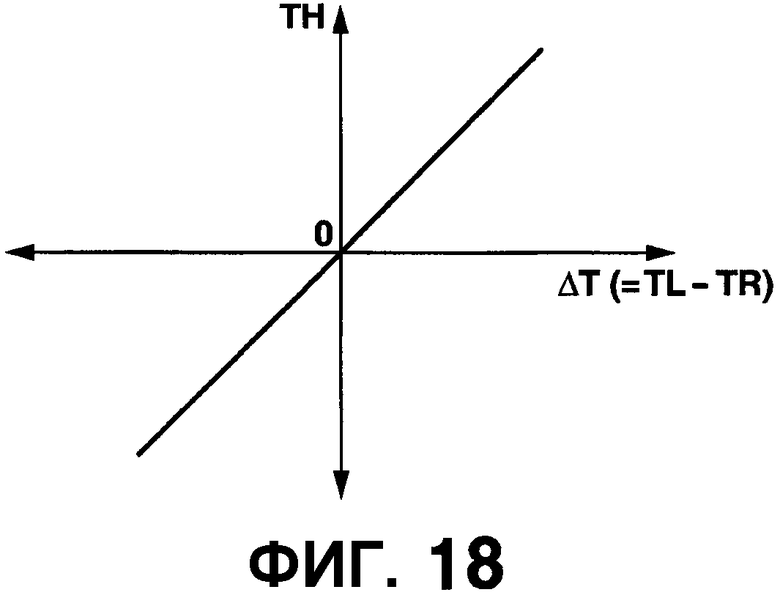
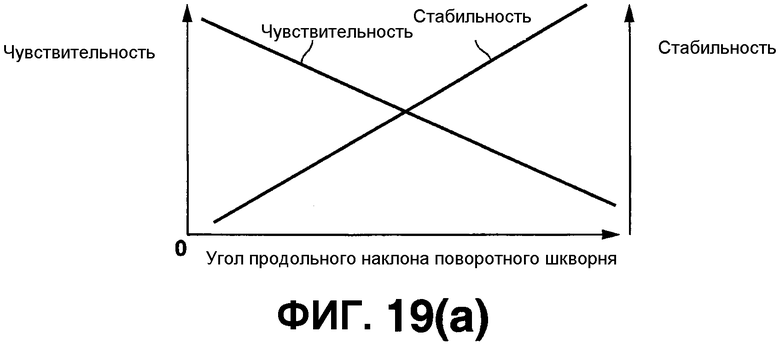
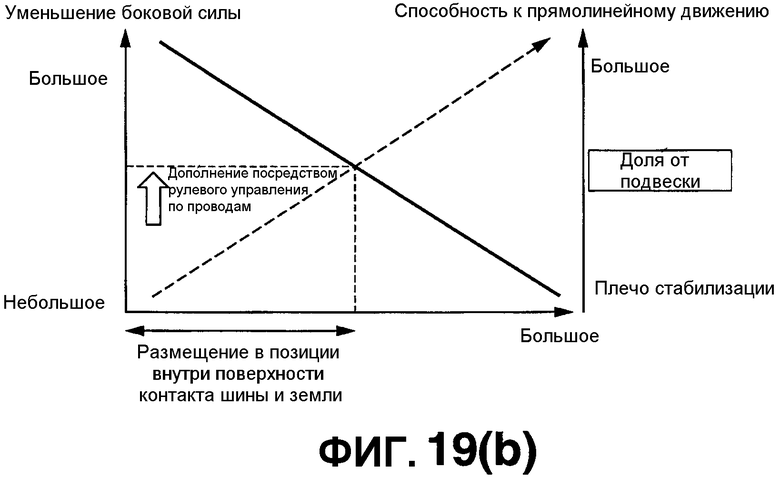

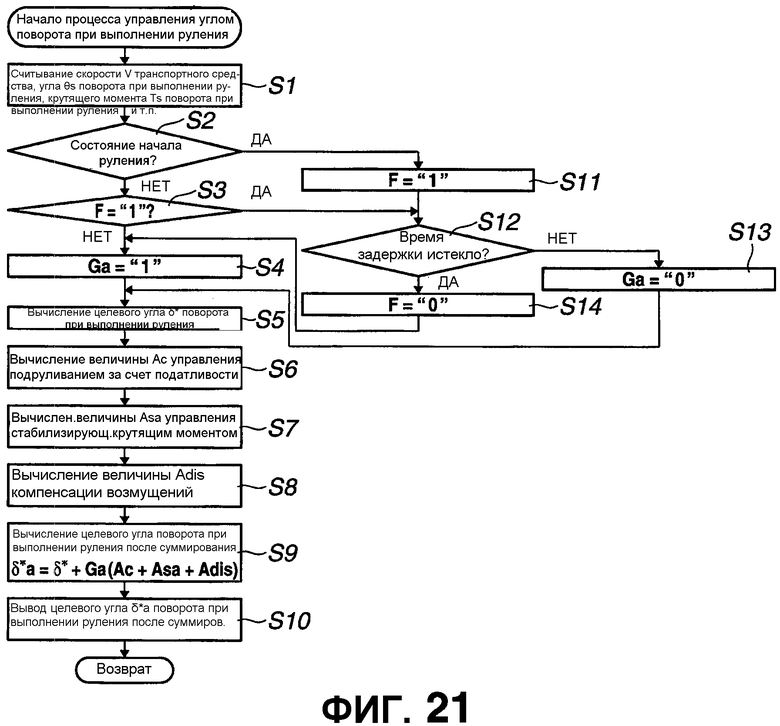
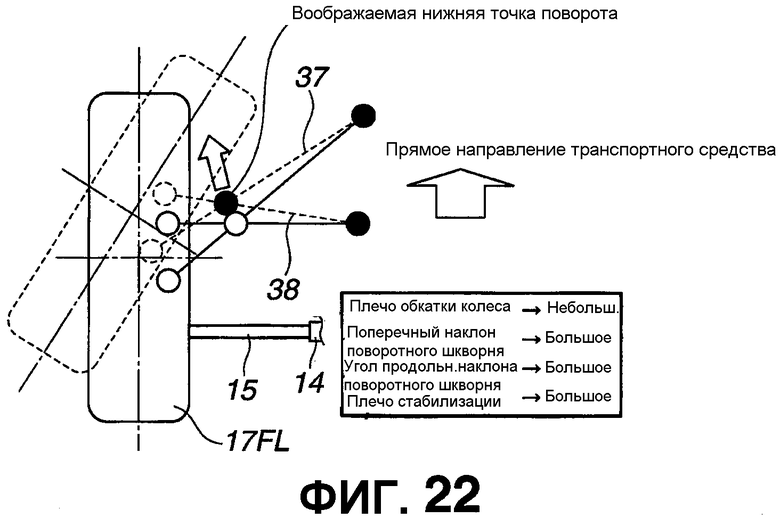
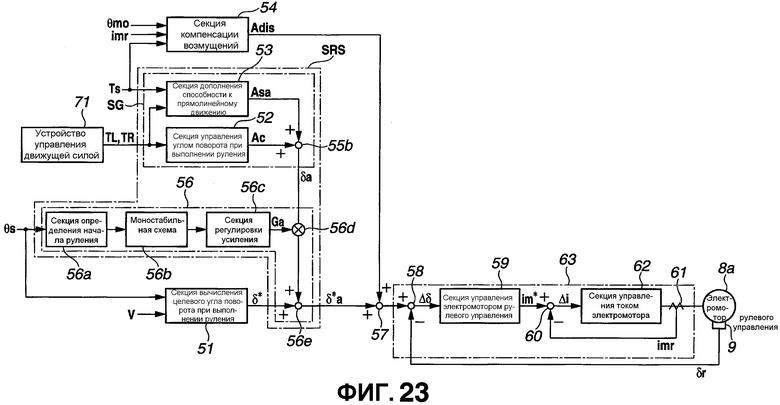
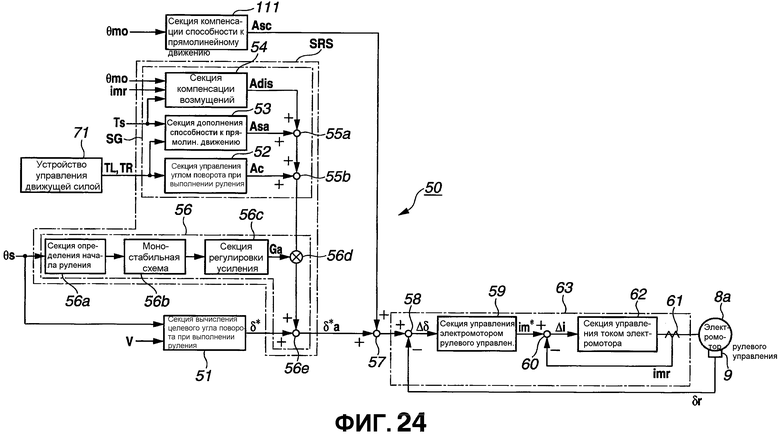
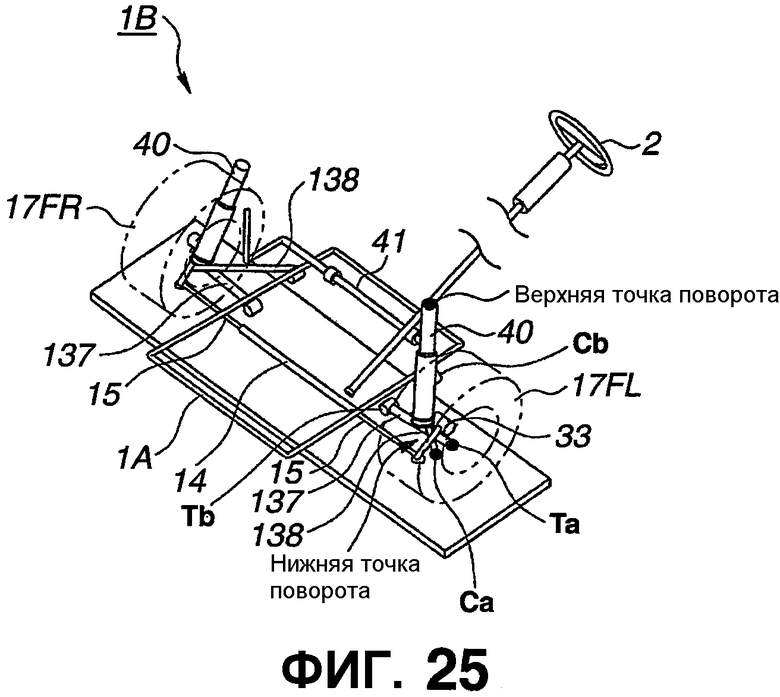
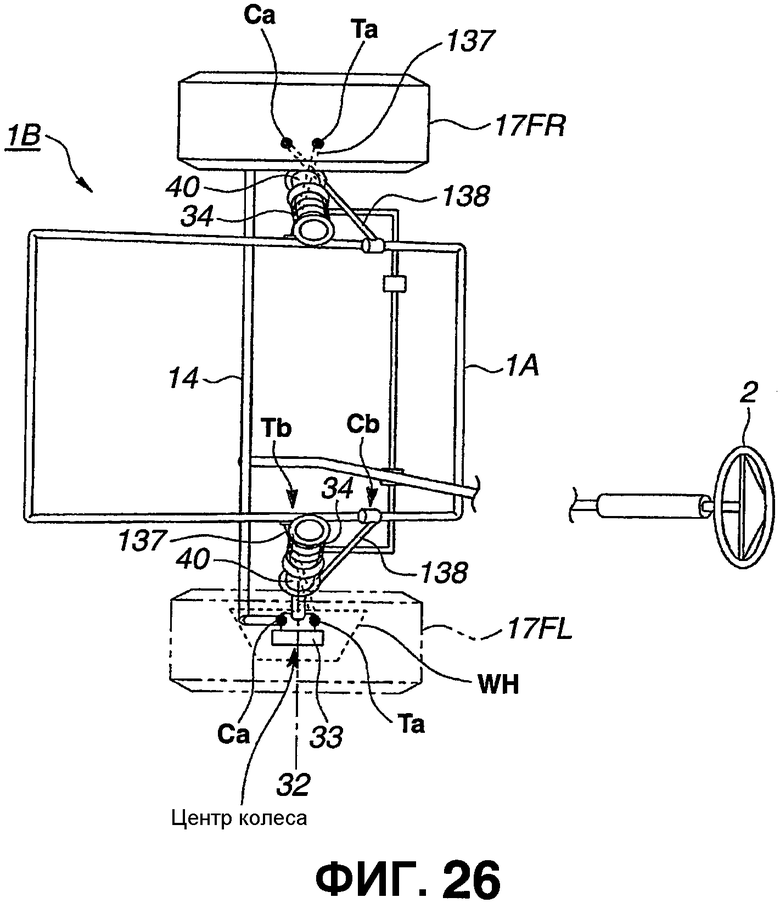
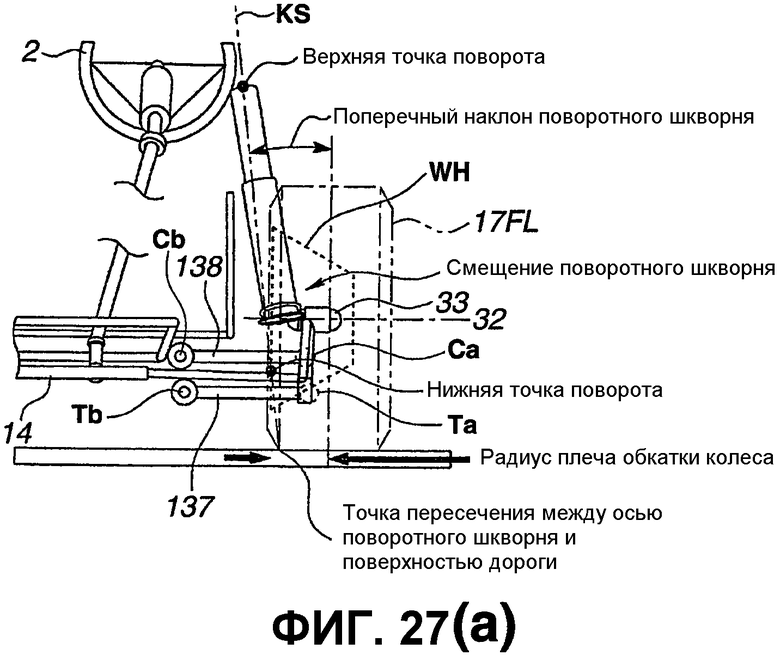
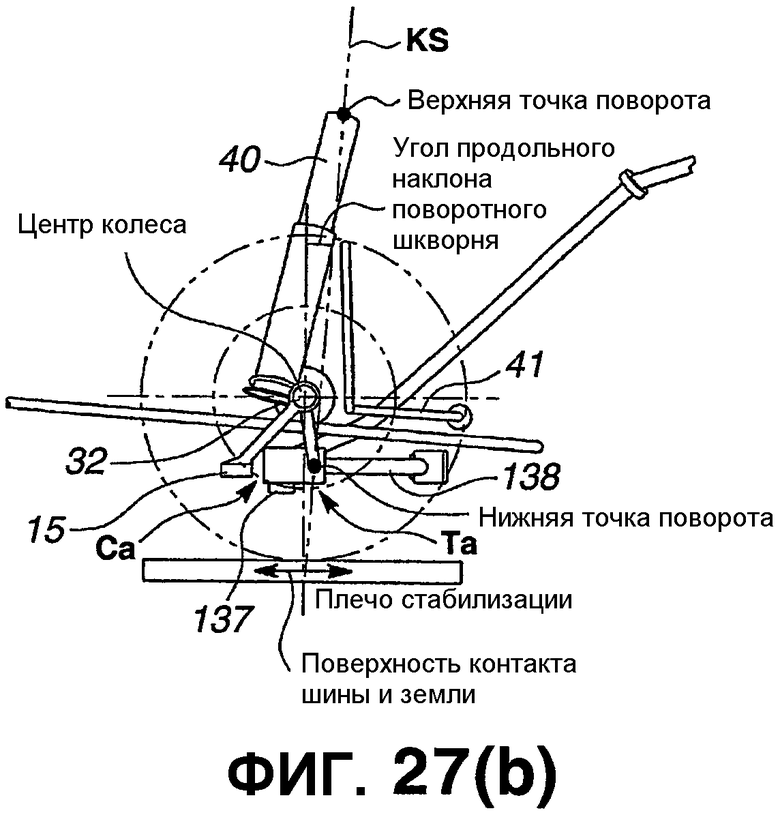
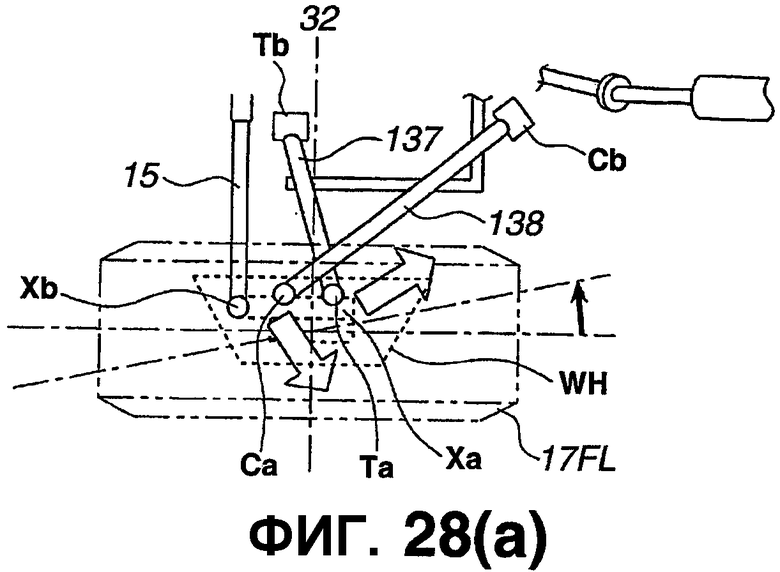
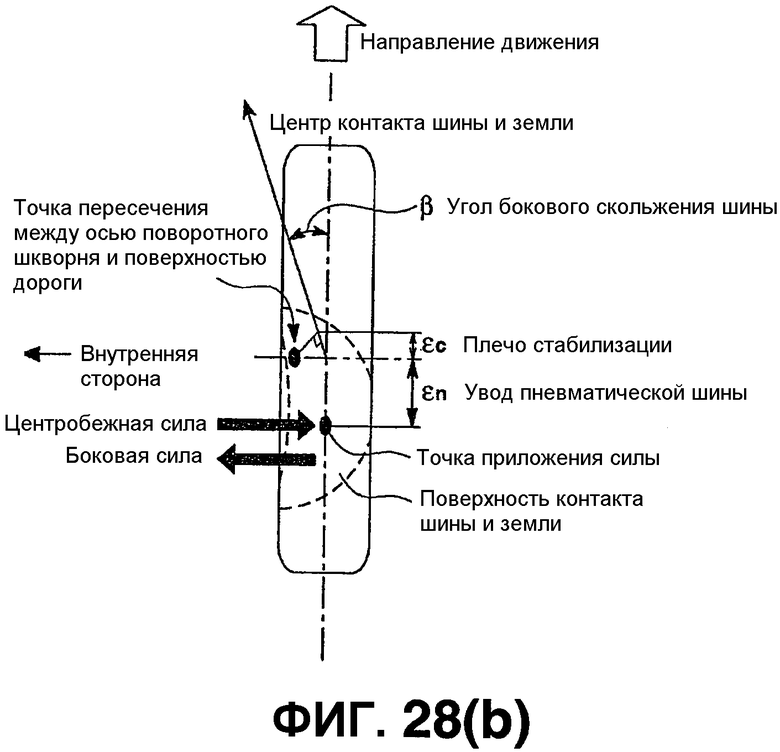
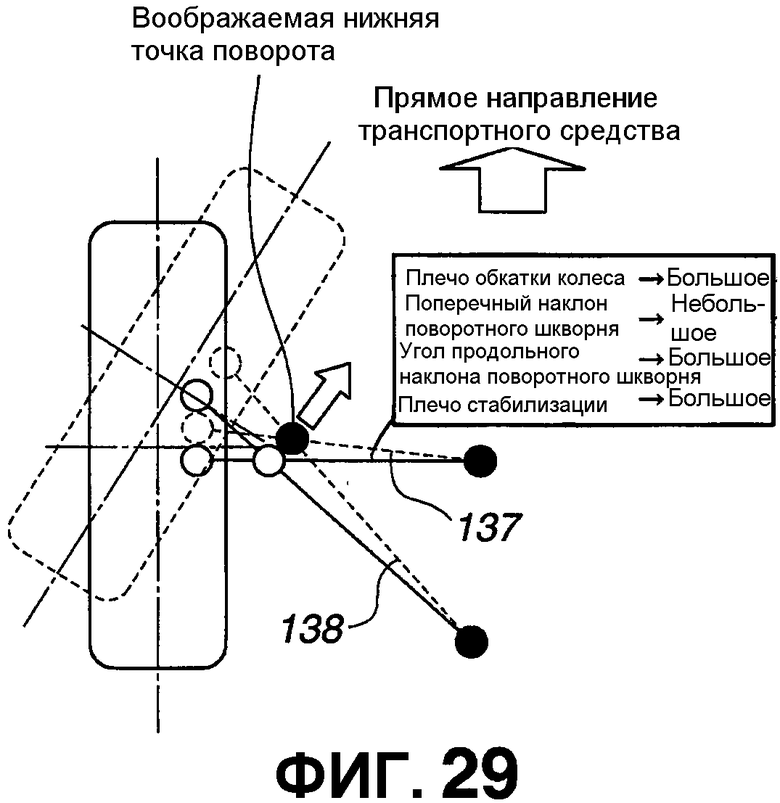

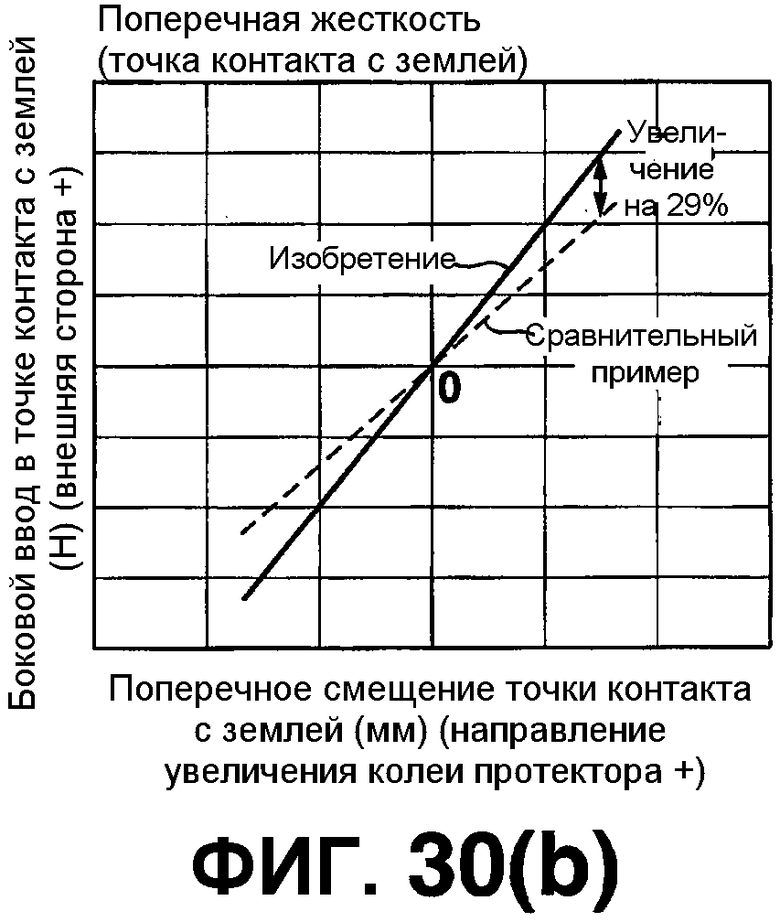
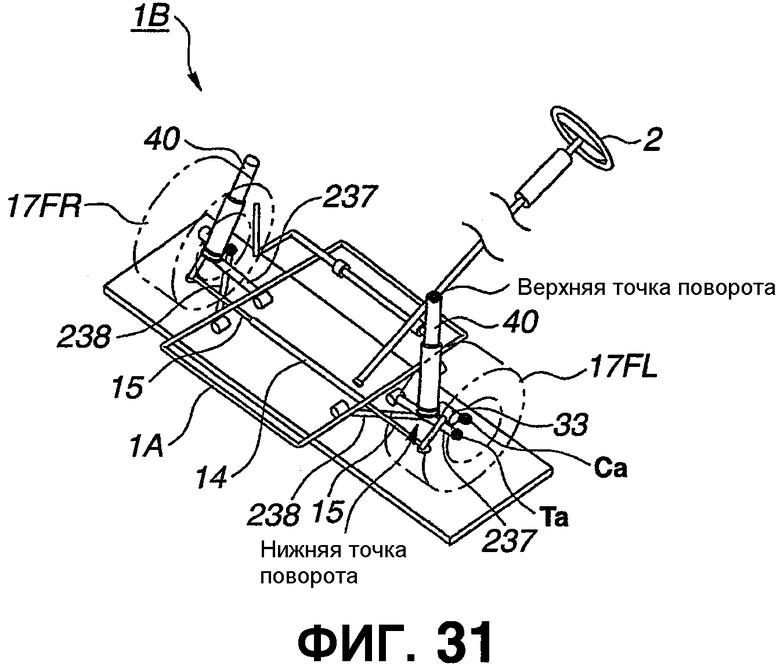
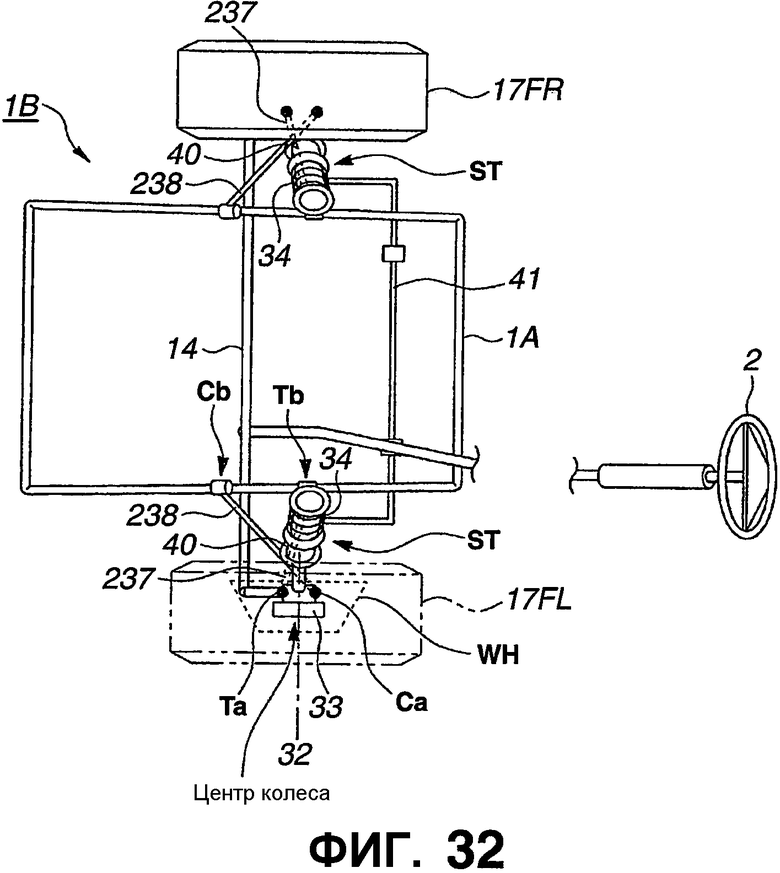
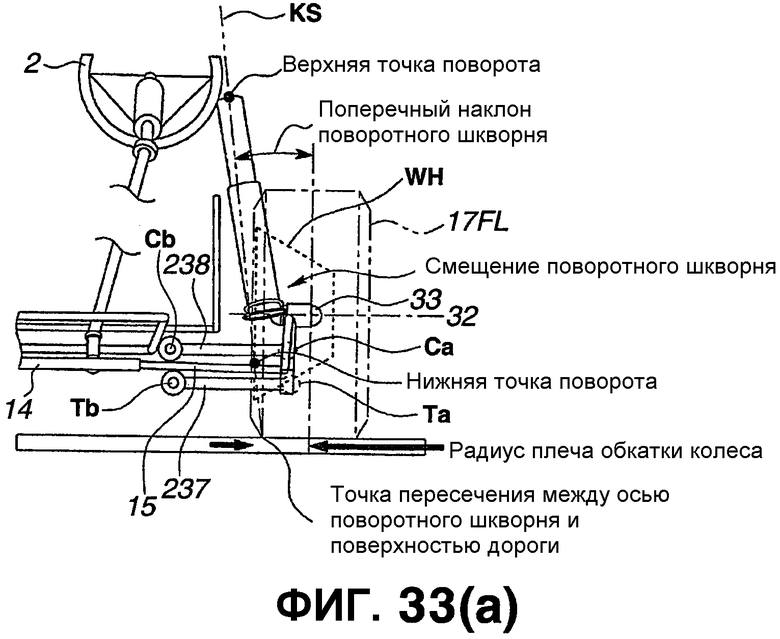
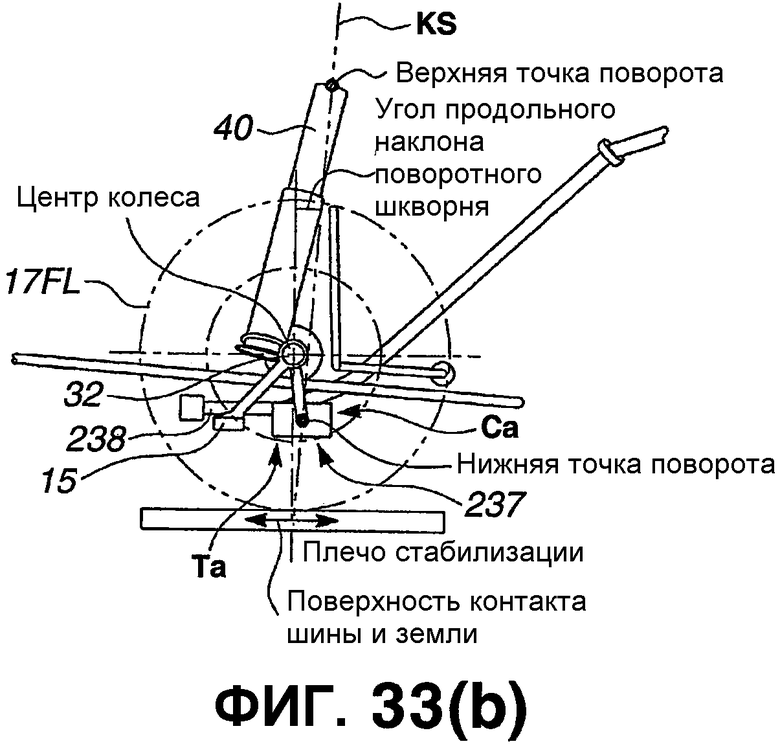
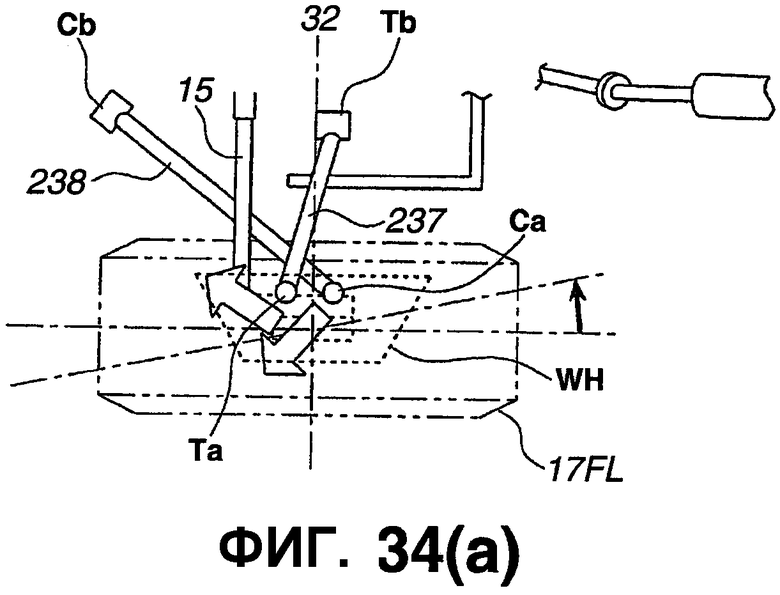
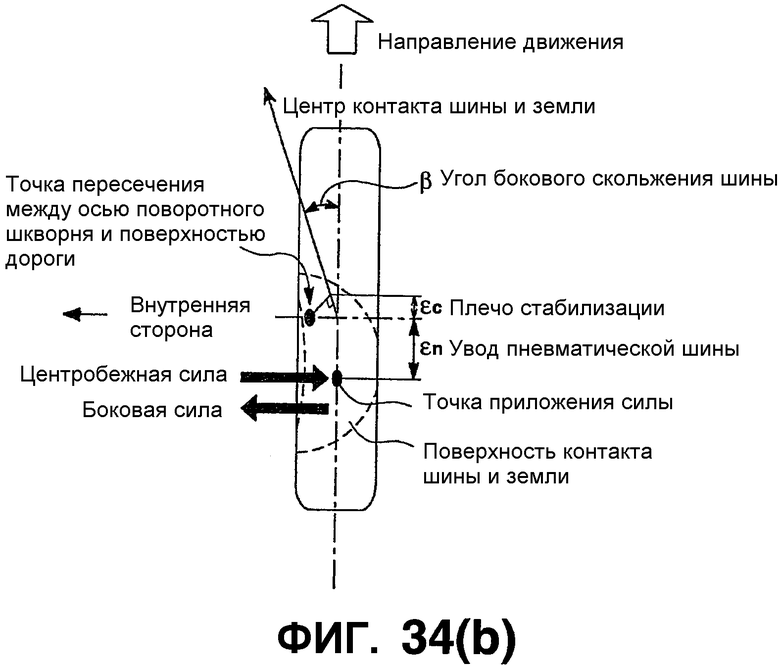
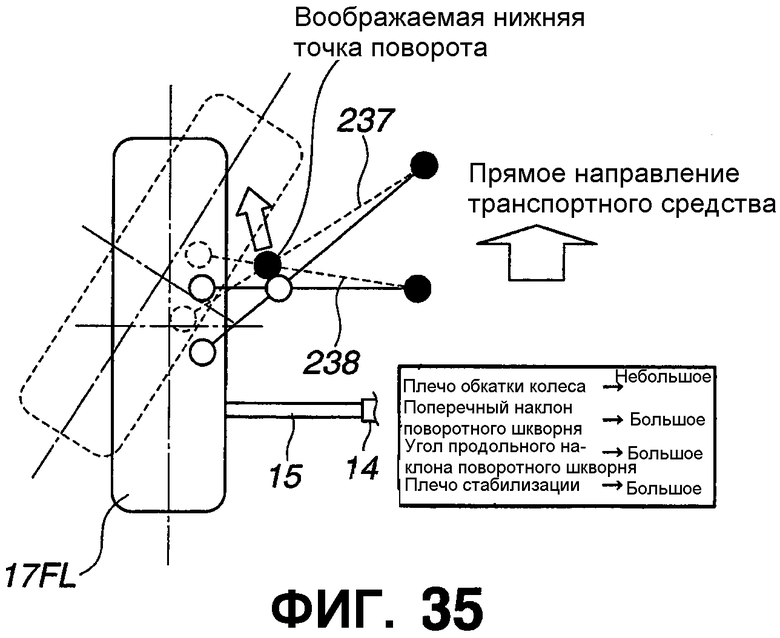
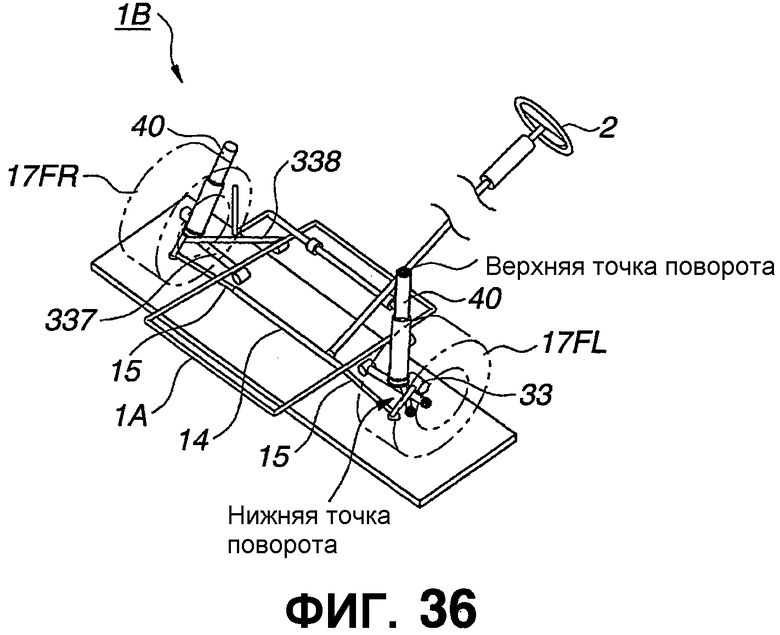
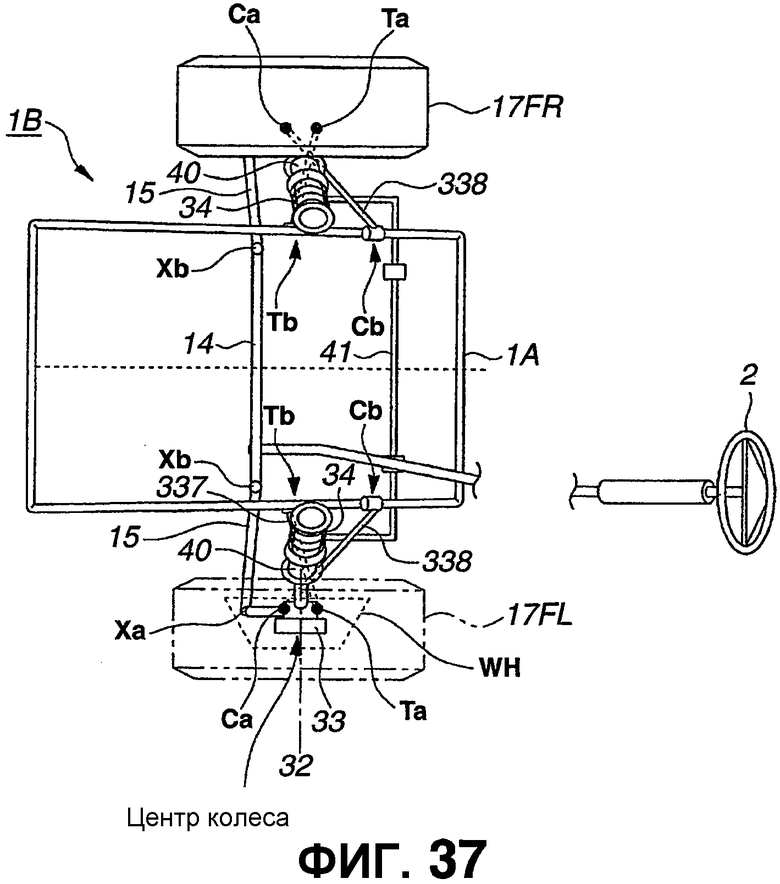
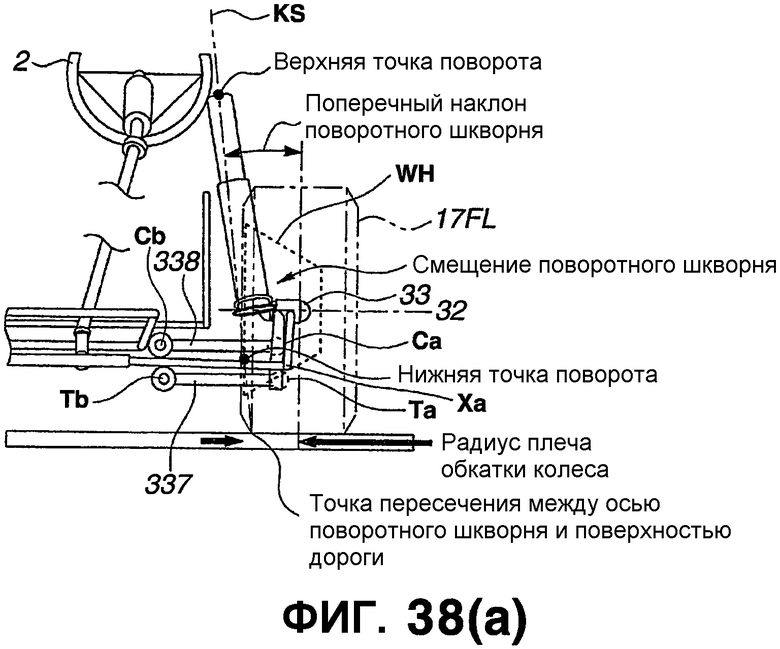
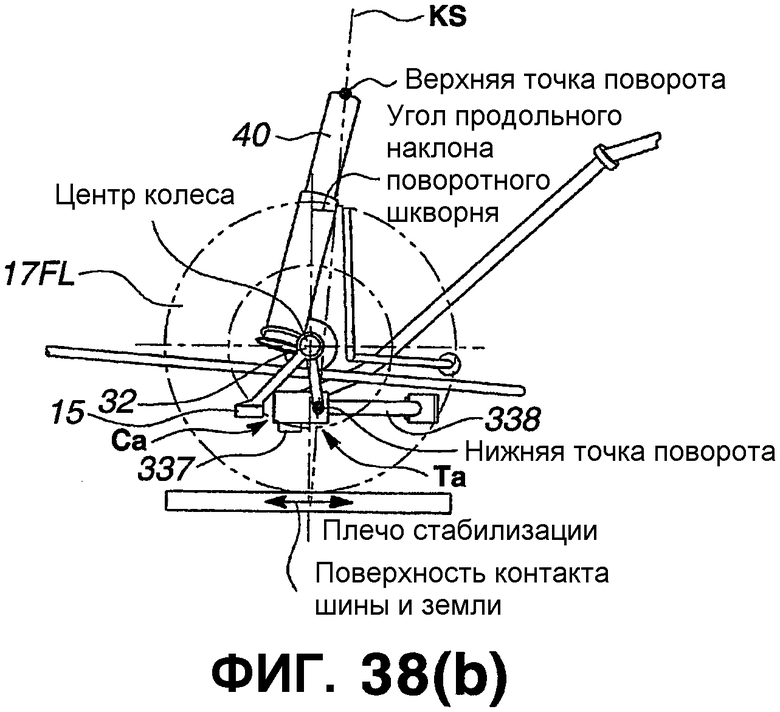
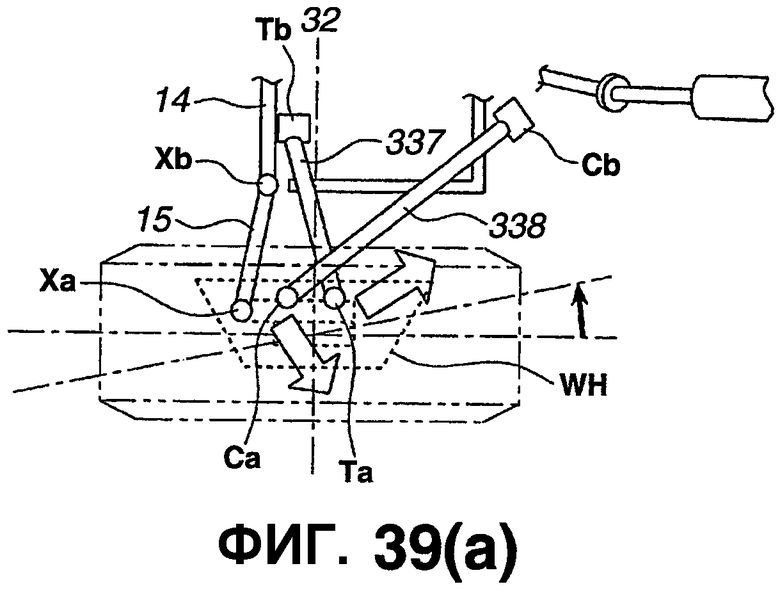
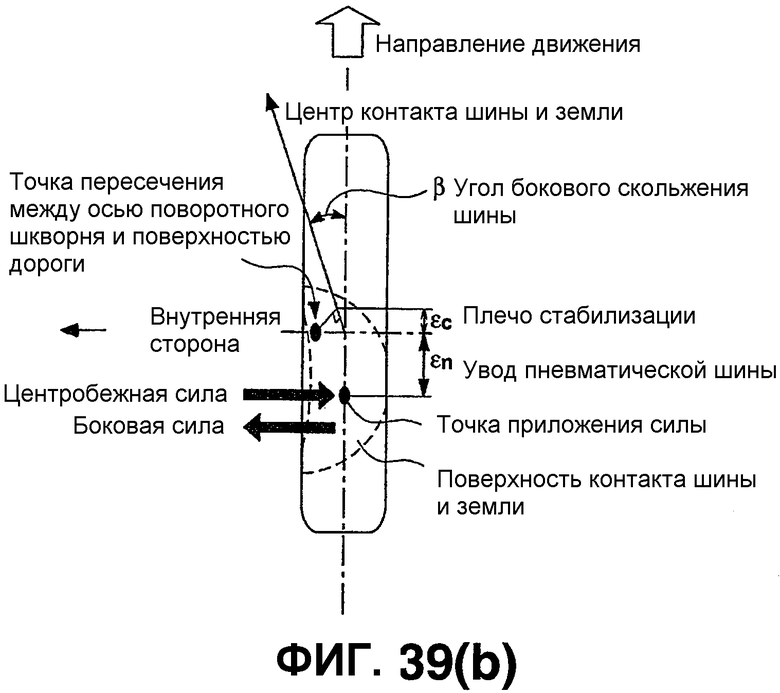
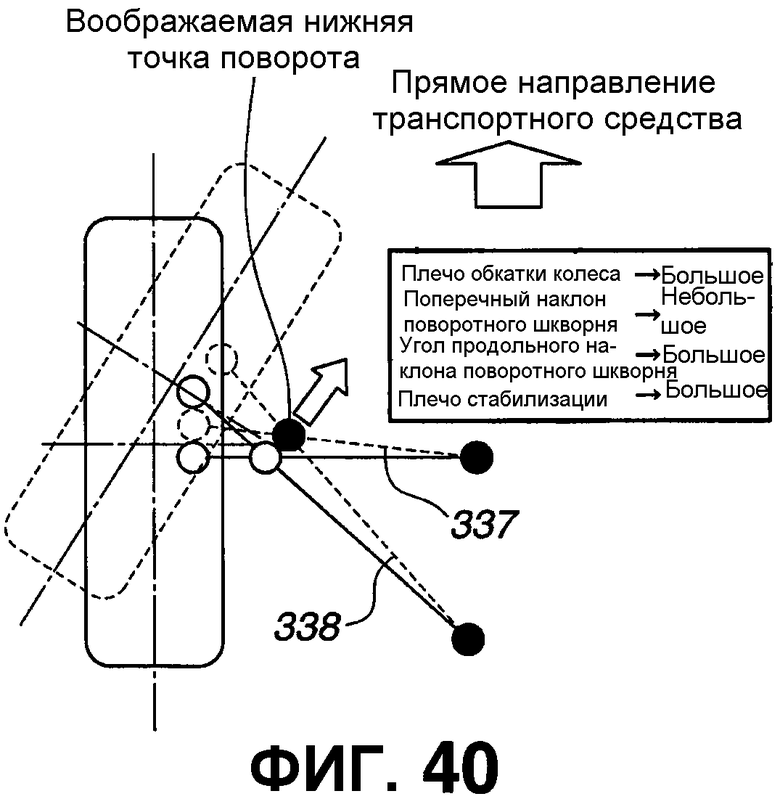
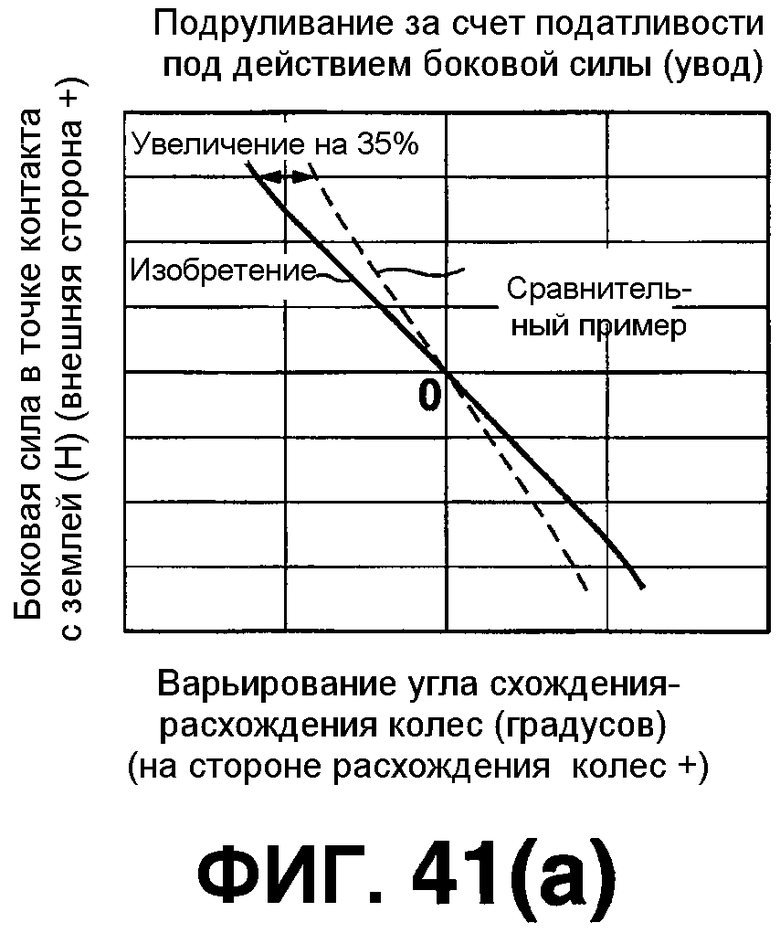
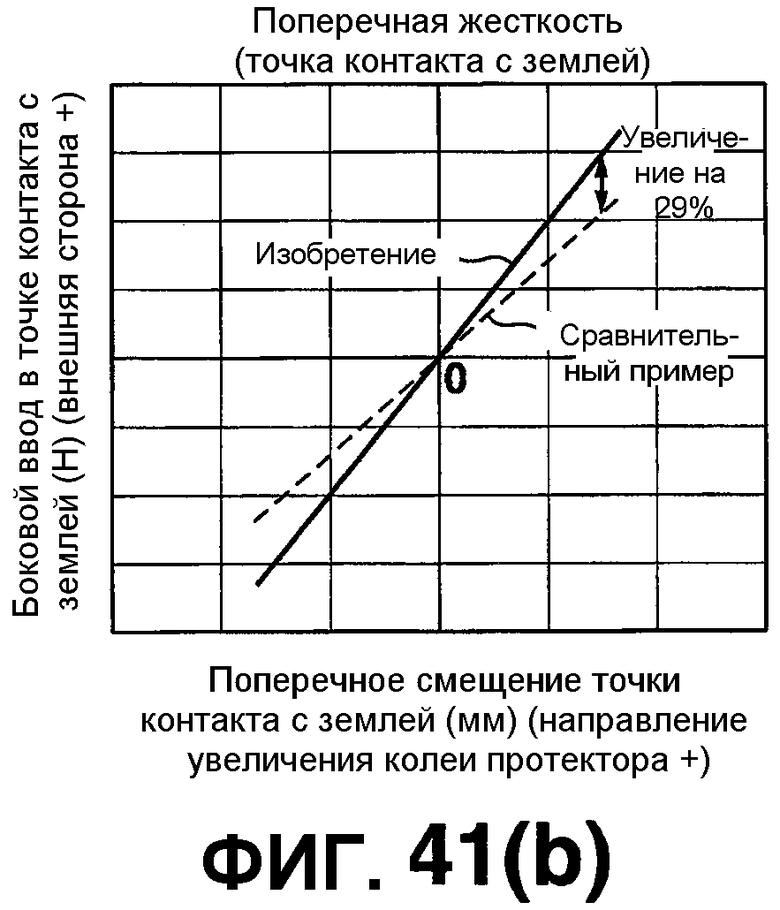
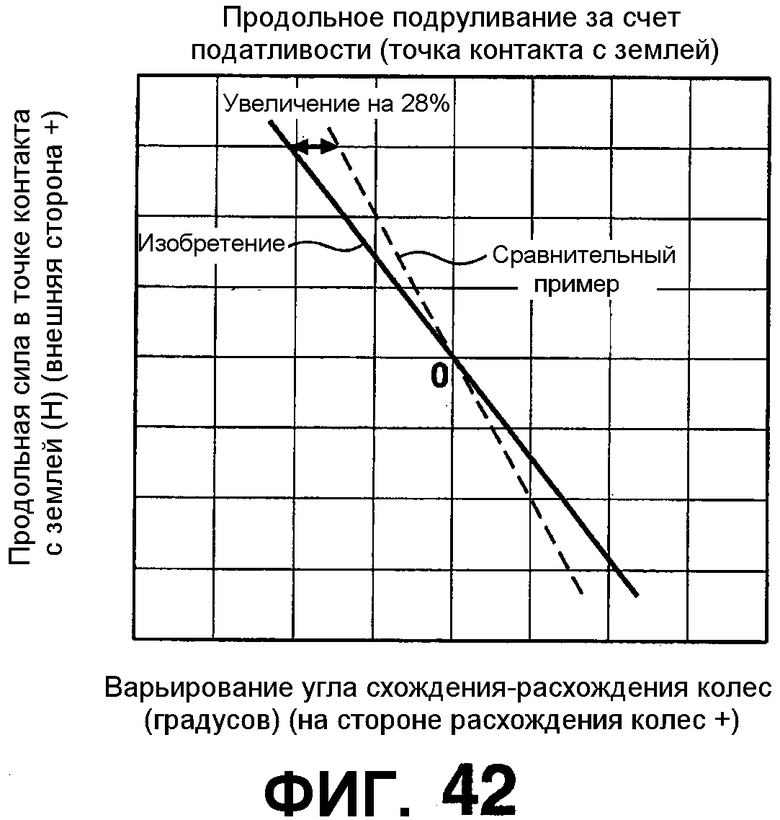
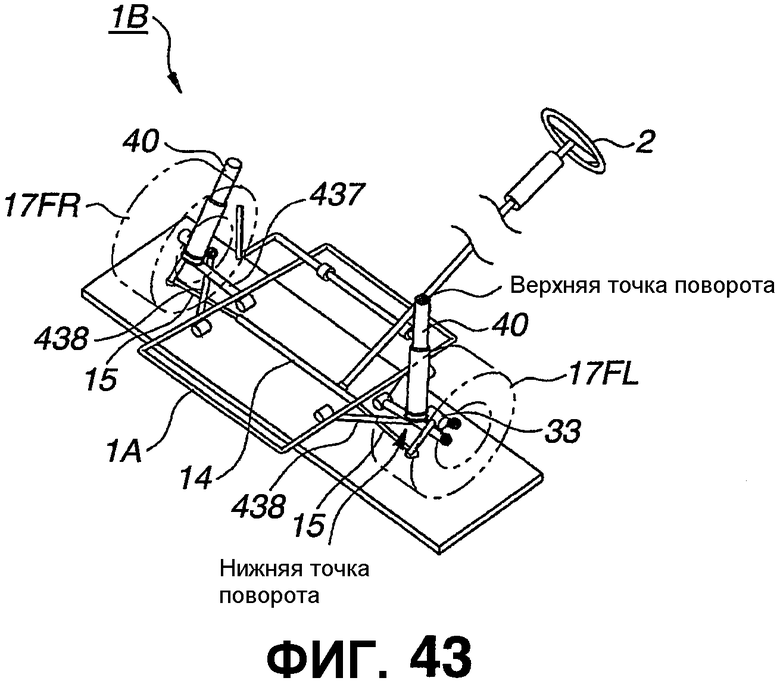
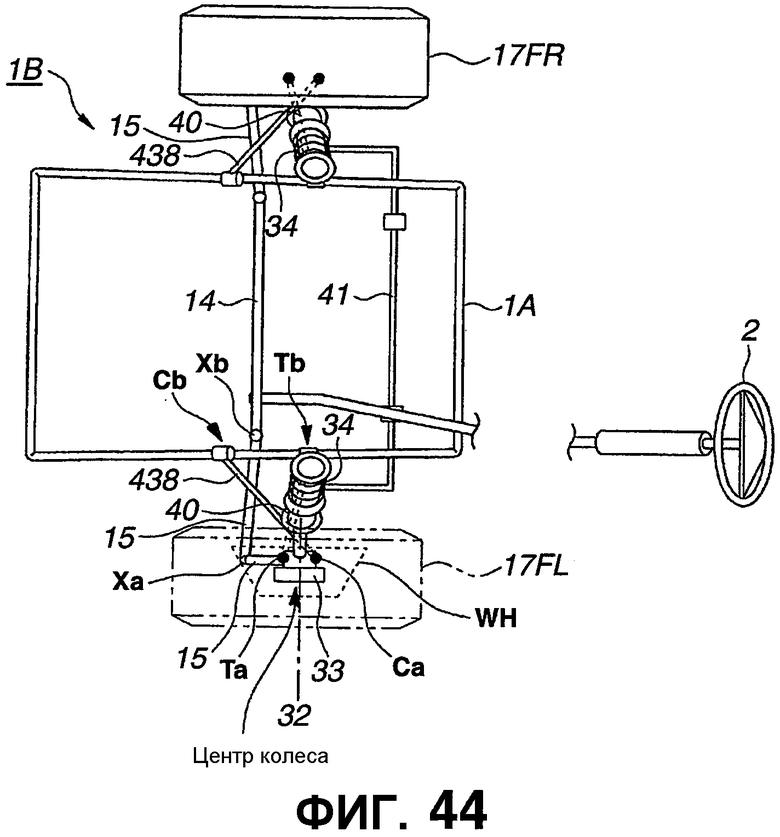

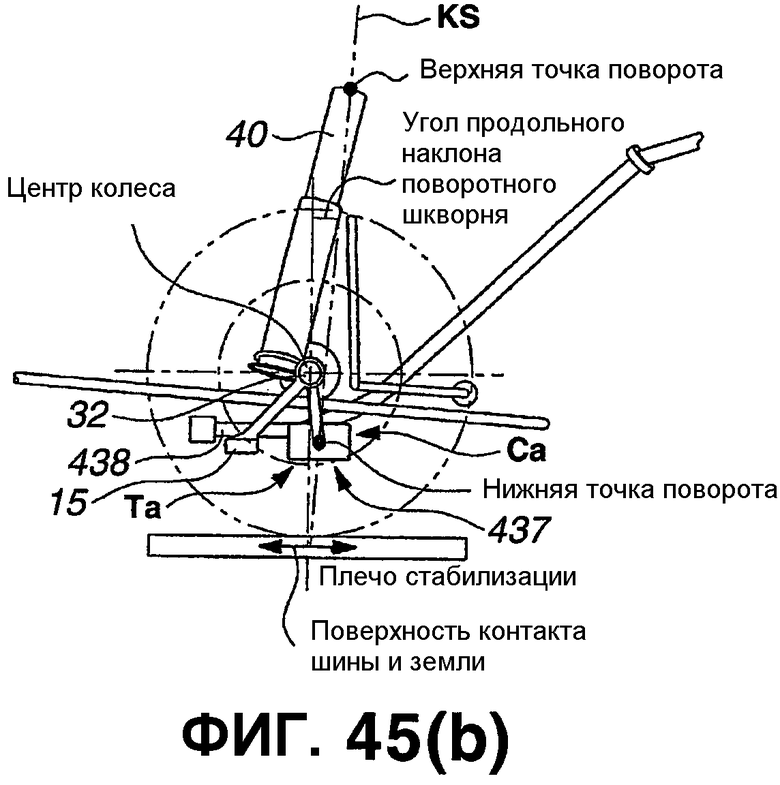
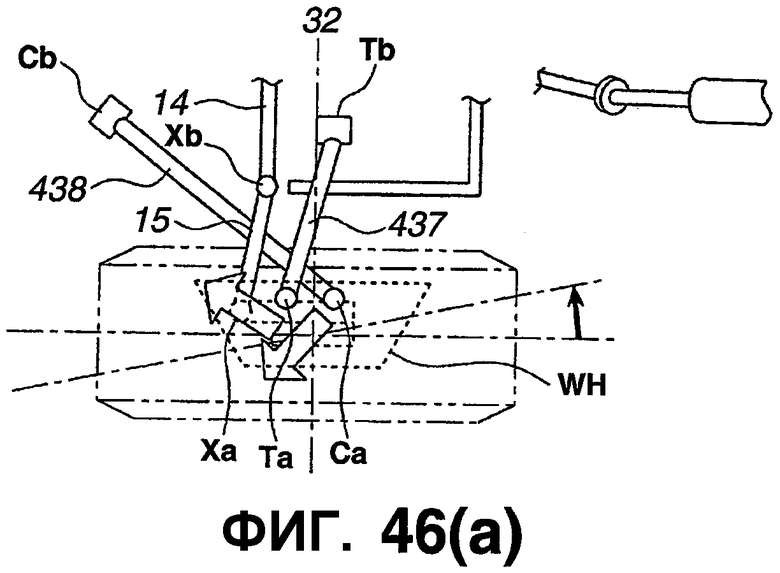
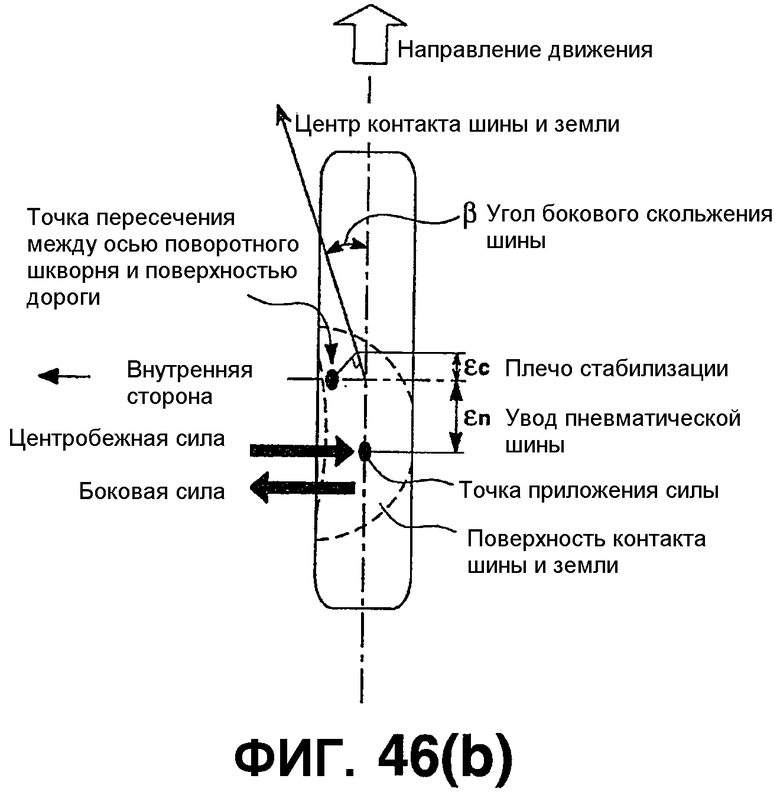
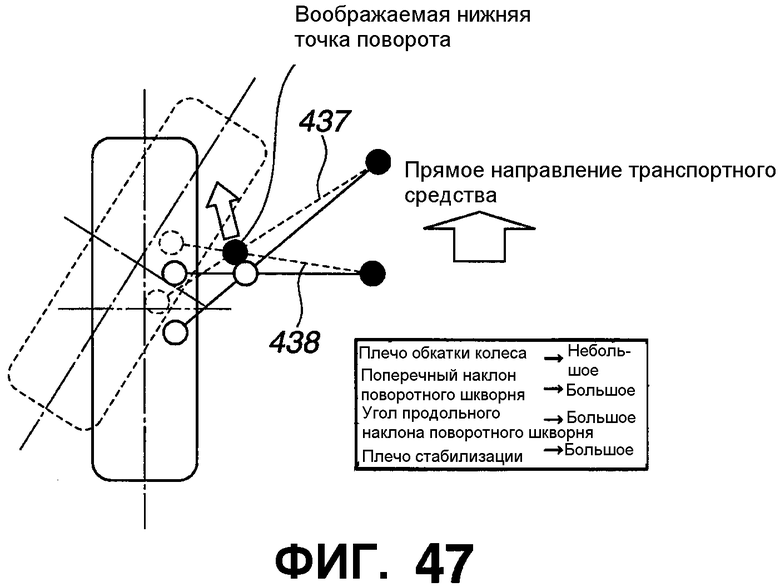
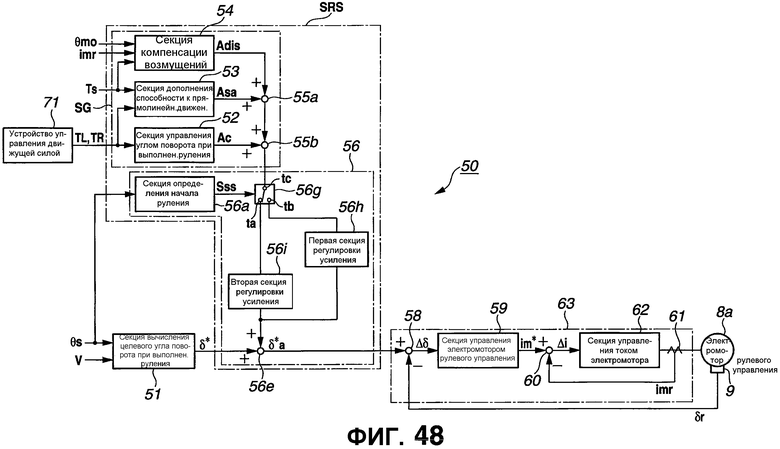
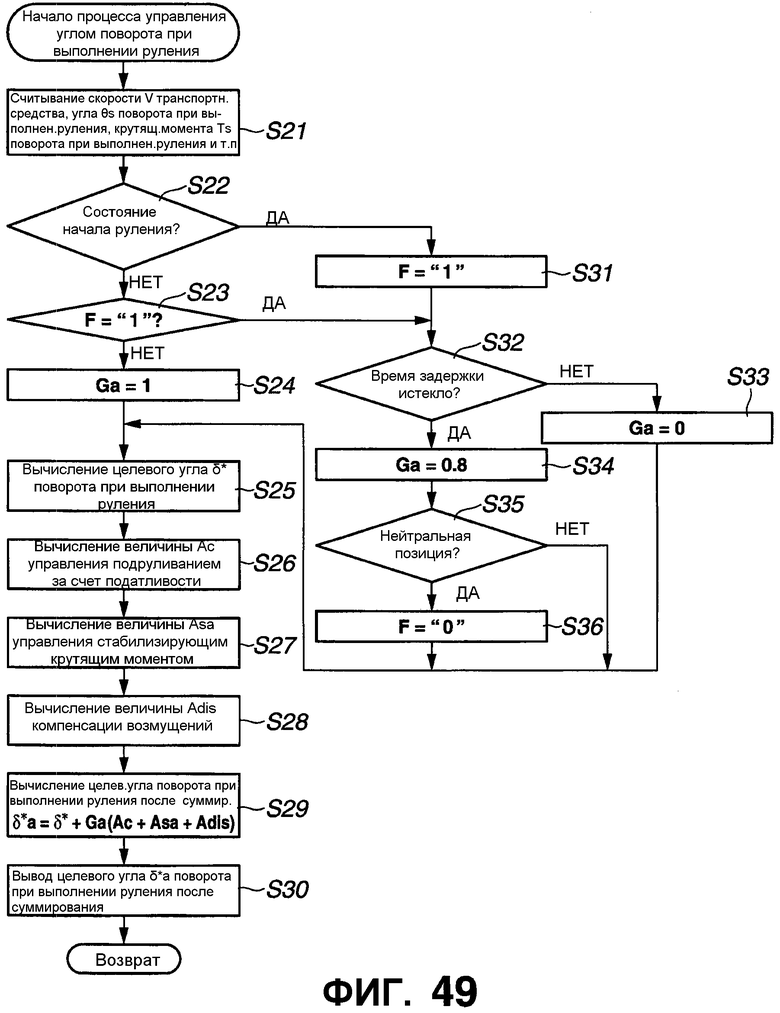
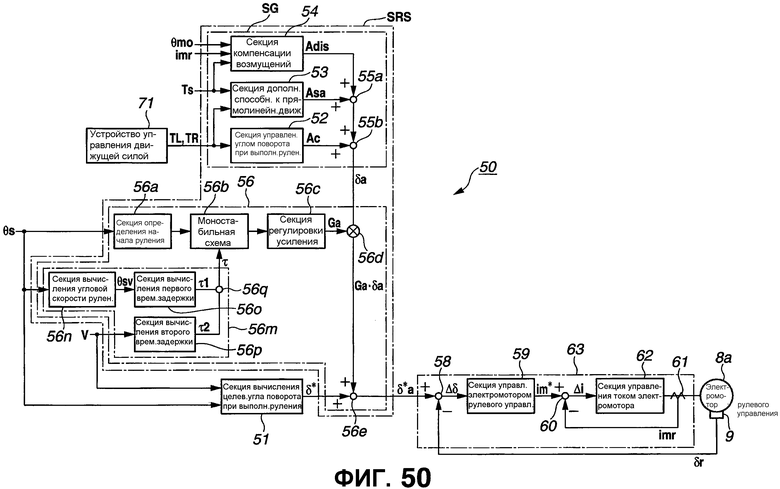
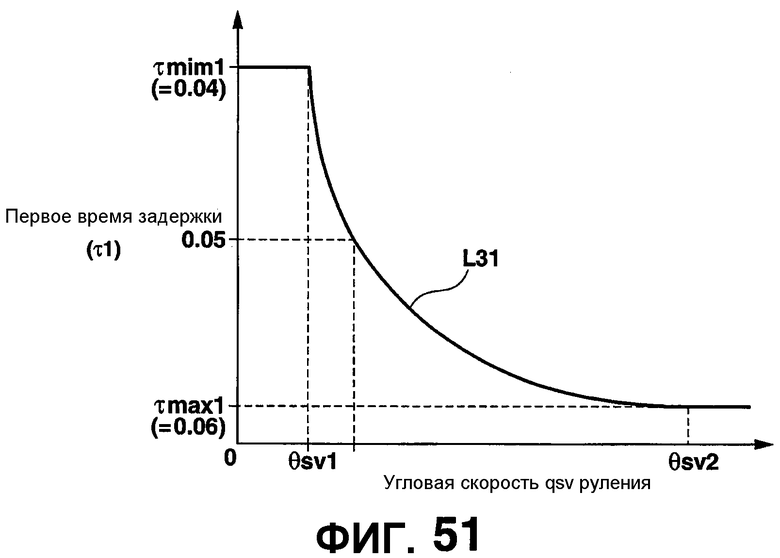
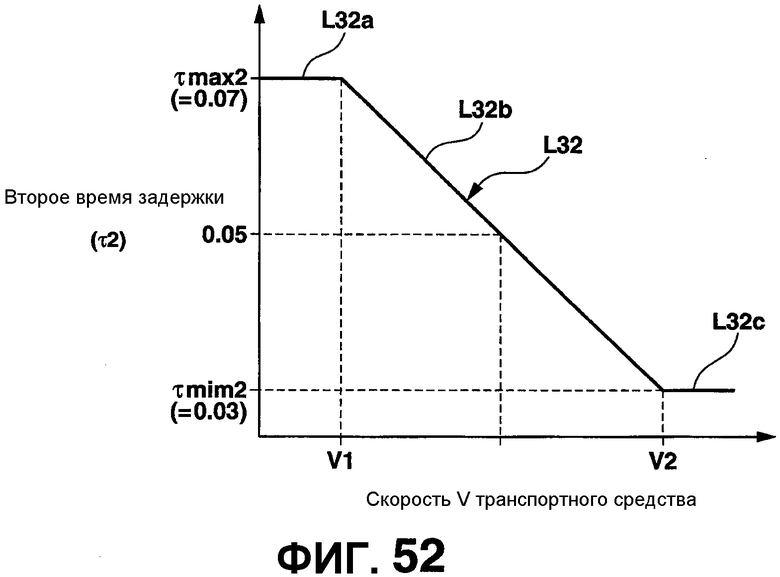
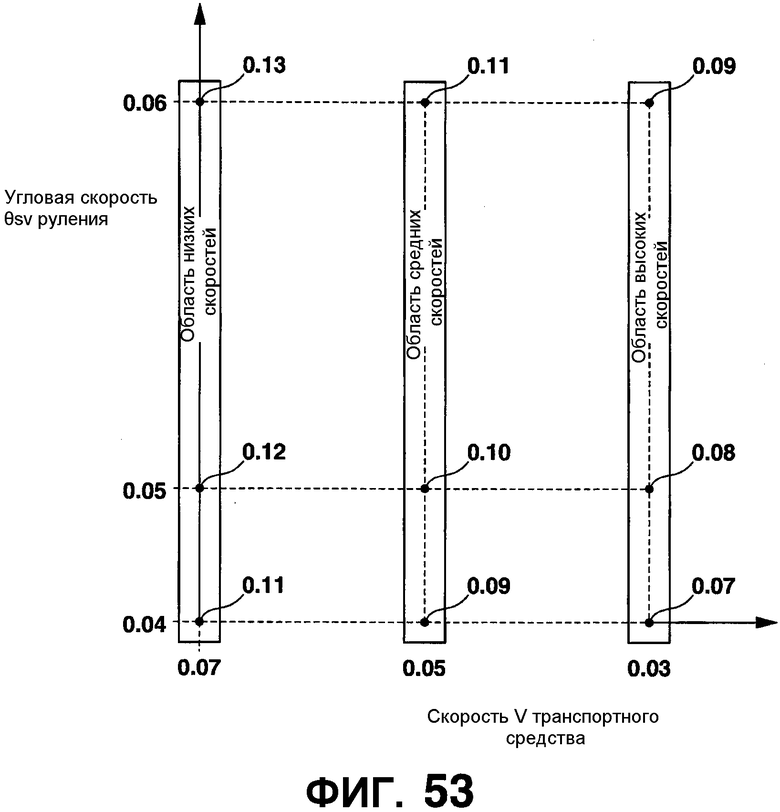
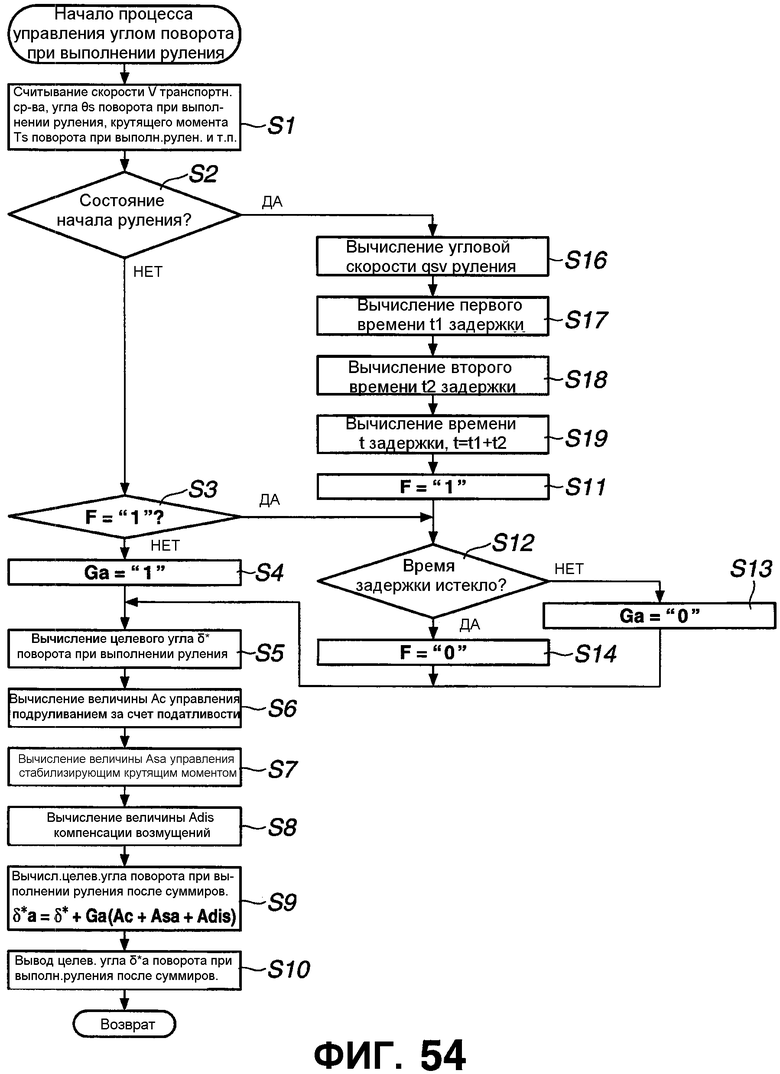
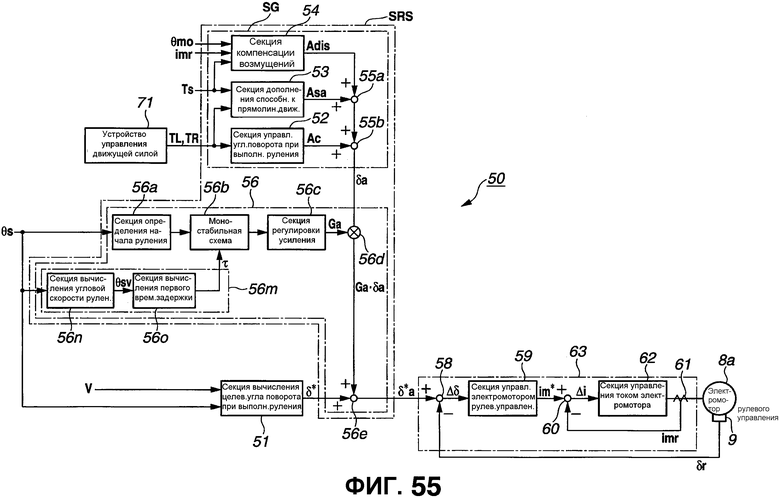
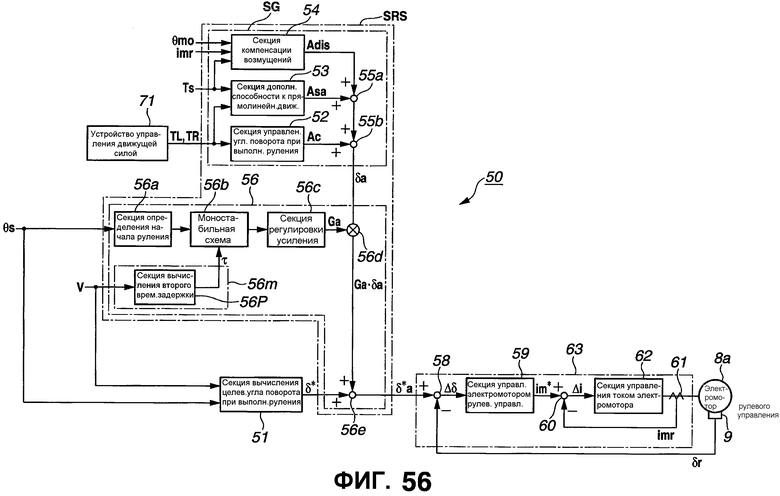
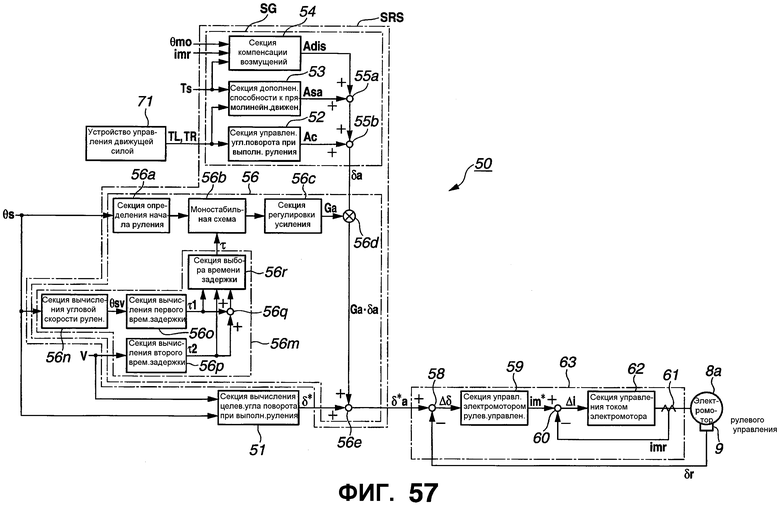
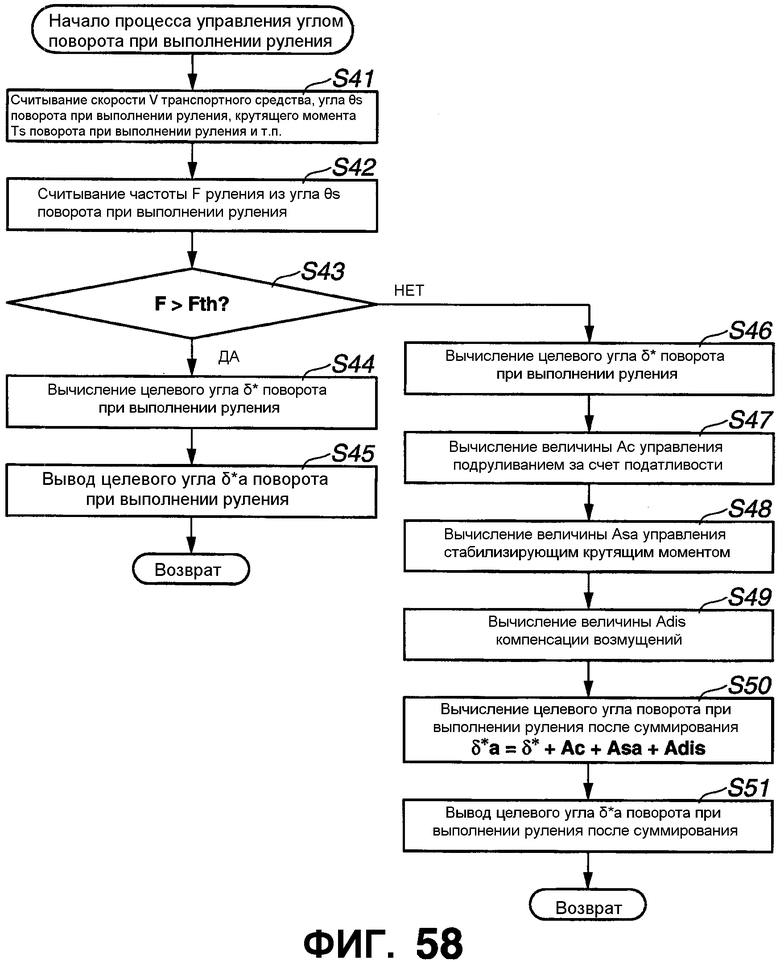
Группа изобретений относится к вариантам выполнения моторного транспортного средства, имеющего устройство подвески для поддержки управляемого колеса, и вариантам способа управления выполнением руления для управляемого колеса, поддерживаемого устройством подвески. Устройство подвески включает в себя: колесо для шины, которое должно быть оснащено шиной; механизм ступицы колеса, чтобы поддерживать колесо для шины; первый элемент тяги, соединяющий механизм ступицы колеса и кузов транспортного средства на нижней стороне от полуоси в направлении вверх и вниз транспортного средства; второй элемент тяги, соединяющий механизм ступицы колеса и кузов транспортного средства на нижней стороне от полуоси в направлении вверх и вниз транспортного средства и пересекающий первый элемент тяги при виде сверху транспортного средства; и рулевую зубчатую рейку, перемещающуюся в направлении ширины транспортного средства и выполняющую руление механизмом ступицы колеса. Обеспечивается улучшение устойчивости и управляемости за счет конструкции подвески транспортного средства. 4 н. и 34 з.п. ф-лы, 58 ил.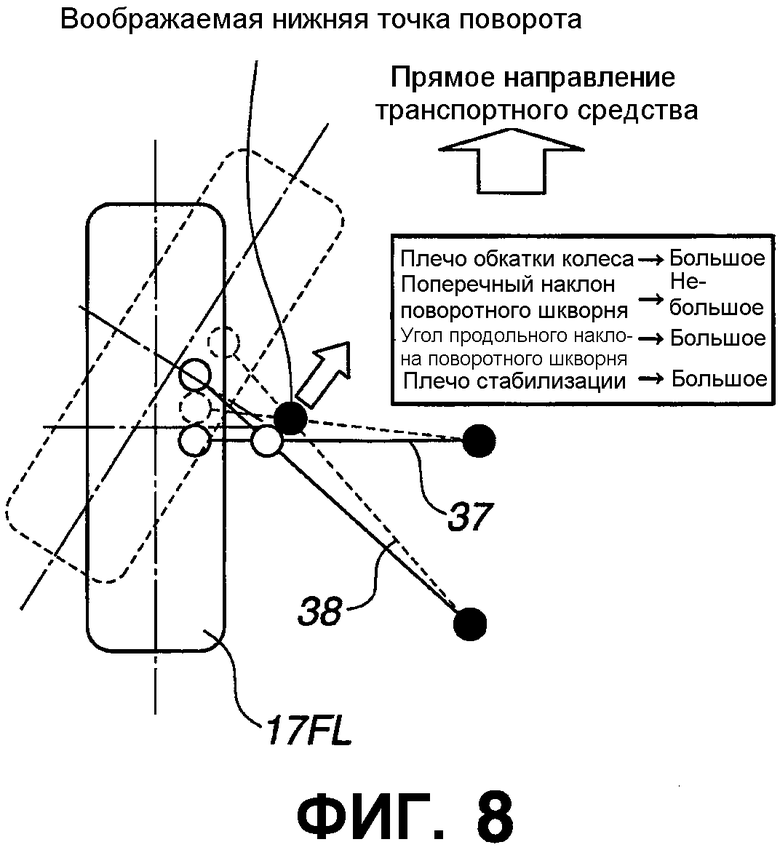
1. Моторное транспортное средство, содержащее:
- устройство управления выполнением руления, чтобы выполнять руление управляемым колесом посредством приведения в действие актуатора в соответствии с состоянием руления рулевого колеса; и
- устройство подвески, чтобы поддерживать управляемое колесо на кузове транспортного средства;
при этом устройство подвески содержит:
- механизм ступицы колеса, чтобы поддерживать колесо для шины, которое должно быть снабжено шиной;
- первый элемент тяги, соединяющий механизм ступицы колеса и кузов транспортного средства на нижней стороне от полуоси в направлении вверх и вниз транспортного средства; и
- второй элемент тяги, соединяющий механизм ступицы колеса и кузов транспортного средства на нижней стороне от полуоси в направлении вверх и вниз транспортного средства и пересекающий первый элемент тяги при виде сверху транспортного средства;
при этом устройство управления выполнением руления содержит секцию обеспечения способности к прямолинейному движению, чтобы обеспечивать способность к прямолинейному движению устройства подвески, и секцию задания отклика при выполнении руления, чтобы задать начальную характеристику отклика при выполнении руления для характеристики отклика при выполнении руления устройства подвески посредством регулирования управления обеспечением способности к прямолинейному движению секции обеспечения способности к прямолинейному движению, когда операция руления с поворотом рулевого колеса начинается из нейтральной позиции рулевого колеса.
2. Моторное транспортное средство по п.1,
в котором ось поворотного шкворня, проходящая через верхнюю точку поворота устройства подвески и нижнюю точку поворота, расположенную в точке пересечения первого элемента тяги и второго элемента тяги, установлена с возможностью проходить через поверхность контакта шины и земли в нейтральной позиции рулевого колеса;
в котором устройство управления выполнением руления выполнено с возможностью выполнения руления управляемым колесом посредством образования восстанавливающей силы для стабилизации (самовыравнивания) управляемого колеса посредством приведения в действие актуатора и, тем самым, обеспечения способности к прямолинейному движению транспортного средства.
3. Моторное транспортное средство по п.1, в котором секция задания отклика при выполнении руления выполнена с возможностью задавать высокую чувствительность при выполнении руления для чувствительности при выполнении руления устройства подвески в начальном состоянии выполнения руления, когда операция руления с поворотом рулевого колеса начинается из нейтральной позиции рулевого колеса, и задавать требуемую чувствительность при выполнении руления посредством управления обеспечением способности к прямолинейному движению секции обеспечения способности к прямолинейному движению в состоянии выполнения руления после начального состояния выполнения руления.
4. Моторное транспортное средство по любому из пп.1-3, в котором устройство управления выполнением руления выполнено с возможностью обеспечивать способность к прямолинейному движению транспортного средства посредством вычисления стабилизирующего крутящего момента.
5. Моторное транспортное средство по любому из пп.1-3, в котором устройство управления выполнением руления является системой рулевого управления по проводам, считывающей варьирование угла поворота при выполнении руления при операции поворота рулевого колеса и включающей в себя актуатор рулевого управления для того, чтобы выполнять руление управляемым колесом в соответствии с результатом считывания, и устройство управления актуатором, чтобы управлять актуатором рулевого управления.
6. Моторное транспортное средство по любому из пп.1-3, в котором позиции соединения на стороне кузова транспортного средства первого и второго элементов тяг размещены на задней стороне от полуоси в направлении вперед и назад транспортного средства при виде сверху транспортного средства.
7. Моторное транспортное средство по любому из пп.1-3, в котором позиции соединения на стороне кузова транспортного средства первого и второго элементов тяг размещены на передней стороне от полуоси в направлении вперед и назад транспортного средства при виде сверху транспортного средства.
8. Моторное транспортное средство по любому из пп.1-3, в котором рулевая зубчатая рейка, чтобы выполнять руление механизмом ступицы колеса посредством перемещения в направлении ширины транспортного средства, расположена на передней стороне от полуоси в направлении вперед и назад транспортного средства.
9. Моторное транспортное средство по любому из пп.1-3, в котором рулевая зубчатая рейка, чтобы выполнять руление механизмом ступицы колеса посредством перемещения в направлении ширины транспортного средства, расположена на задней стороне от полуоси в направлении вперед и назад транспортного средства.
10. Моторное транспортное средство по любому из пп.1-3, в котором геометрия подвески, определенная поворотным шкворнем, задана так, чтобы иметь положительное плечо обкатки колеса.
11. Моторное транспортное средство по любому из пп.1-3, в котором первый элемент тяги является элементом поперечной тяги, а второй элемент тяги является элементом работающей на сжатие тяги.
12. Моторное транспортное средство по п.11, в котором соединительный участок элемента работающей на сжатие тяги с кузовом транспортного средства находится на задней стороне соединительного участка элемента поперечной тяги с кузовом транспортного средства в направлении вперед и назад транспортного средства, а соединительный участок элемента работающей на сжатие тяги с механизмом ступицы колеса находится на передней стороне соединительного участка элемента поперечной тяги с механизмом ступицы колеса в направлении вперед и назад транспортного средства.
13. Моторное транспортное средство по п.12, в котором соединительный участок между элементом поперечной тяги и механизмом ступицы колеса находится на задней стороне от полуоси в направлении вперед и назад транспортного средства, а соединительный участок между элементом поперечной тяги и кузовом транспортного средства находится на передней стороне от полуоси в направлении вперед и назад транспортного средства.
14. Моторное транспортное средство по п.12, в котором соединительный участок между элементом поперечной тяги и кузовом транспортного средства находится на задней стороне соединительного участка между элементом работающей на сжатие тяги и механизмом ступицы колеса в направлении вперед и назад транспортного средства.
15. Моторное транспортное средство по п.12, в котором соединительный участок между элементом работающей на сжатие тяги и механизмом ступицы колеса находится на передней стороне от полуоси в направлении вперед и назад транспортного средства, а соединительный участок между элементом работающей на сжатие тяги и кузовом транспортного средства находится на задней стороне соединительного участка между элементом поперечной тяги и механизмом ступицы колеса в направлении вперед и назад транспортного средства.
16. Моторное транспортное средство по п.11, в котором устройство подвески транспортного средства дополнительно содержит элемент поперечной рулевой тяги, который соединен с механизмом ступицы колеса в позиции соединения на внешней стороне соединительных участков элемента поперечной тяги и элемента работающей на сжатие тяги в направлении ширины транспортного средства, и который соединен с кузовом транспортного средства в позиции соединения на задней стороне позиции соединения с механизмом ступицы колеса, и который выполнен с возможностью выполнять руление колесом.
17. Моторное транспортное средство по любому из пп.1-3, в котором первый элемент тяги является элементом поперечной тяги, а второй элемент тяги является элементом работающей на растяжение тяги.
18. Моторное транспортное средство по п.17, в котором соединительный участок элемента работающей на растяжение тяги с кузовом транспортного средства находится на передней стороне соединительного участка элемента поперечной тяги с кузовом транспортного средства в направлении вперед и назад транспортного средства, а соединительный участок элемента работающей на растяжение тяги с механизмом ступицы колеса находится на задней стороне соединительного участка элемента поперечной тяги с механизмом ступицы колеса в направлении вперед и назад транспортного средства.
19. Моторное транспортное средство по п.18, в котором соединительный участок между элементом поперечной тяги и механизмом ступицы колеса находится на передней стороне от полуоси в направлении вперед и назад транспортного средства, а соединительный участок между элементом поперечной тяги и кузовом транспортного средства находится на задней стороне от полуоси в направлении вперед и назад транспортного средства.
20. Моторное транспортное средство по п.17, в котором соединительный участок между элементом поперечной тяги и кузовом транспортного средства находится на передней стороне соединительного участка между элементом работающей на растяжение тяги и механизмом ступицы колеса в направлении вперед и назад транспортного средства.
21. Моторное транспортное средство по п.17, в котором соединительный участок между элементом работающей на растяжение тяги и механизмом ступицы колеса находится на задней стороне от полуоси в направлении вперед и назад транспортного средства, а соединительный участок между элементом работающей на растяжение тяги и кузовом транспортного средства находится на передней стороне соединительного участка между элементом поперечной тяги и механизмом ступицы колеса в направлении вперед и назад транспортного средства.
22. Моторное транспортное средство по п.17, в котором устройство подвески транспортного средства дополнительно содержит элемент поперечной рулевой тяги, который соединен с механизмом ступицы колеса в позиции соединения на внешней стороне соединительных участков элемента поперечной тяги и элемента работающей на растяжение тяги в направлении ширины транспортного средства, и который соединен с кузовом транспортного средства в позиции соединения на задней стороне позиции соединения с механизмом ступицы колеса, и который выполнен с возможностью выполнять руление колесом.
23. Моторное транспортное средство по любому из пп.1-3, в котором устройство управления выполнением руления содержит секцию управления углом поворота при выполнении руления, чтобы оценивать подруливание за счет податливости и корректировать смещение управляемого колеса.
24. Моторное транспортное средство по любому из пп.1-3, в котором секция задания отклика при выполнении руления содержит секцию управления задержкой, чтобы задерживать управление обеспечением способности к прямолинейному движению секции обеспечения способности к прямолинейному движению, когда рулевое колесо поворачивается из нейтральной позиции.
25. Моторное транспортное средство по п.24, в котором секция управления задержкой содержит секцию регулировки усиления, чтобы регулировать начало управления обеспечением способности к прямолинейному движению посредством секции обеспечения способности к прямолинейному движению.
26. Моторное транспортное средство по п.24, в котором секция управления задержкой выполнена с возможностью задерживать управление обеспечением способности к прямолинейному движению секции обеспечения способности к прямолинейному движению и начинать управление обеспечением способности к прямолинейному движению после задержки в 0,1 секунды от времени начала операции руления с поворотом рулевого колеса вправо или влево из состояния поддержания нейтрального состояния.
27. Моторное транспортное средство по п.24, в котором секция управления задержкой начинает управление обеспечением способности к прямолинейному движению секции обеспечения способности к прямолинейному движению ступенчатым способом.
28. Моторное транспортное средство по п.24, в котором секция управления задержкой начинает управление обеспечением способности к прямолинейному движению секции обеспечения способности к прямолинейному движению постепенно.
29. Моторное транспортное средство по п.24, в котором секция управления задержкой содержит, по меньшей мере, одну из секции вычисления первого времени задержки для того, чтобы вычислять первое время задержки в соответствии с угловой скоростью руления, полученной посредством различения угла поворота при выполнении руления, считанного датчиком угла поворота при выполнении руления, и секции вычисления второго времени задержки для того, чтобы вычислять второе время задержки в соответствии со скоростью транспортного средства.
30. Моторное транспортное средство по п.24, в котором секция управления задержкой содержит секцию вычисления первого времени задержки, чтобы вычислять первое время задержки в соответствии с угловой скоростью руления, полученной посредством различения угла поворота при выполнении руления, секцию вычисления второго времени задержки, чтобы вычислять второе время задержки в соответствии со скоростью транспортного средства, и секцию суммирования, чтобы вычислять время задержки посредством суммирования первого и второго времен задержки.
31. Моторное транспортное средство по п.29, в котором секция вычисления первого времени задержки имеет карту вычисления первого времени задержки, представляющую взаимосвязь между угловой скоростью руления и первым временем задержки, и вычисляет первое время задержки из угловой скорости руления посредством обращения к карте вычисления первого времени задержки.
32. Моторное транспортное средство по п.29, в котором секция вычисления второго времени задержки имеет карту вычисления второго времени задержки, представляющую взаимосвязь между скоростью транспортного средства и вторым временем задержки, и вычисляет второе время задержки из скорости транспортного средства посредством обращения к карте вычисления второго времени задержки.
33. Моторное транспортное средство по любому из пп.1-3, в котором устройство управления выполнением руления содержит:
- секцию вычисления целевого угла поворота при выполнении руления, чтобы вычислять целевой угол поворота при выполнении руления в соответствии с углом поворота при выполнении руления;
- сумматор, чтобы суммировать, с целевым углом поворота при выполнении руления, вычисленным посредством секции вычисления целевого угла поворота при выполнении руления, величину управления обеспечением способности к прямолинейному движению секции обеспечения способности к прямолинейному движению;
- секцию управления электромотором рулевого управления, чтобы формировать командный ток для электромотора, чтобы задавать угол поворота электромотора рулевого управления, образующего актуатор рулевого управления, равным выходному сигналу суммирования сумматора; и
- секцию управления током, чтобы формировать ток возбуждения электромотора, который должен подаваться в электромотор рулевого управления так, что ток возбуждения электромотора становится равным командному току для электромотора.
34. Моторное транспортное средство, содержащее:
- устройство управления выполнением руления, чтобы выполнять руление управляемым колесом посредством приведения в действие актуатора в соответствии с состоянием руления рулевого колеса; и
- устройство подвески, чтобы поддерживать управляемое колесо на кузове транспортного средства;
при этом устройство подвески содержит:
- механизм ступицы колеса, чтобы поддерживать колесо для шины, которое должно быть снабжено шиной;
- первый элемент тяги, соединяющий механизм ступицы колеса и кузов транспортного средства на нижней стороне от полуоси в направлении вверх и вниз транспортного средства; и
- второй элемент тяги, соединяющий механизм ступицы колеса и кузов транспортного средства на нижней стороне от полуоси в направлении вверх и вниз транспортного средства и пересекающий первый элемент тяги при виде сверху транспортного средства;
при этом устройство управления выполнением руления содержит секцию обеспечения способности к прямолинейному движению, чтобы обеспечивать способность к прямолинейному движению устройства подвески, и секцию задания отклика при выполнении руления, чтобы задать высокую чувствительность при выполнении руления для чувствительности при выполнении руления устройства подвески в начальном состоянии выполнения руления, когда операция руления с поворотом рулевого колеса начинается из нейтральной позиции рулевого колеса, и задать требуемую чувствительность при выполнении руления посредством управления обеспечением способности к прямолинейному движению секции обеспечения способности к прямолинейному движению в состоянии выполнения руления после начального состояния выполнения руления.
35. Способ управления выполнением руления для управляемого колеса, поддерживаемого устройством подвески, содержащим: механизм ступицы колеса, чтобы поддерживать колесо для шины, которое должно быть обеспечено управляемым колесом; первый элемент тяги, соединяющий механизм ступицы колеса и кузов транспортного средства на нижней стороне от полуоси в направлении вверх и вниз транспортного средства; и второй элемент тяги, соединяющий механизм ступицы колеса и кузов транспортного средства на нижней стороне от полуоси в направлении вверх и вниз транспортного средства и пересекающий первый элемент тяги при виде сверху транспортного средства; при этом ось поворотного шкворня устройства подвески установлена с возможностью проходить через поверхность контакта шины и земли в нейтральной позиции рулевого колеса; при этом упомянутый способ управления выполнением руления содержит этапы, на которых:
- выполняют руление управляемым колесом посредством приведения в действие актуатора в соответствии с состоянием руления рулевого колеса; и
- выполняют управление, чтобы обеспечить способность к прямолинейному движению транспортного средства посредством приложения восстанавливающей силы для стабилизации (самовыравнивания) управляемого колеса посредством приведения в действие актуатора.
36. Способ управления выполнением руления по п. 35, в котором управление, чтобы обеспечить способность к прямолинейному движению транспортного средства, выполняют посредством вычисления стабилизирующего крутящего момента и приложения к управляемому колесу вычисленного стабилизирующего крутящего момента.
37. Способ управления выполнением руления для управляемого колеса, поддерживаемого устройством подвески, содержащим: механизм ступицы колеса, чтобы поддерживать колесо для шины, которое должно быть обеспечено управляемым колесом; первый элемент тяги, соединяющий механизм ступицы колеса и кузов транспортного средства на нижней стороне от полуоси в направлении вверх и вниз транспортного средства; и второй элемент тяги, соединяющий механизм ступицы колеса и кузов транспортного средства на нижней стороне от полуоси в направлении вверх и вниз транспортного средства и пересекающий первый элемент тяги при виде сверху транспортного средства; при этом ось поворотного шкворня, проходящая через верхнюю точку поворота и нижнюю точку поворота элементов тяг, установлена с возможностью проходить через поверхность контакта шины и земли в нейтральной позиции рулевого колеса; при этом упомянутый способ управления выполнением руления содержит этапы, на которых:
- считывают варьирование угла поворота при выполнении руления при операции поворота рулевого колеса и управляют актуатором рулевого управления для выполнения руления управляемым колесом в соответствии с результатом считывания;
- выполняют управление, чтобы обеспечить способность к прямолинейному движению транспортного средства посредством приложения восстанавливающей силы для стабилизации (самовыравнивания) управляемого колеса посредством приведения в действие актуатора; и
- задают чувствительность при выполнении руления устройства подвески в качестве начальной чувствительности при выполнении руления на начальной стадии руления, когда операция руления с поворотом рулевого колеса начинается из нейтральной позиции рулевого колеса, и начинают управление, чтобы обеспечить способность к прямолинейному движению транспортного средства с помощью актуатора рулевого управления после истечения периода времени начальной установки.
38. Способ управления выполнением руления по п.37, в котором период времени начальной установки задают равным 0,1 секунды.
| JP H11129926 A, 18.05.1999; | |||
| JP 2008018924 A, 31.01.2008; | |||
| JP 2009090762 A, 30.04.2009 | |||
| JP S63166610 A, 09.07.1988 | |||
| JP 2009248649 A, 29.10.2009 | |||
| JP 2007118672 A, 17.05.2007 | |||
| СПОСОБ ШИРОТНО-ИМПУЛЬСНОЙ ЗАПИСИ ЦИФРОВОЙ ИНФОРМАЦИИ НА МАГНИТНЫЙ ИЛИ ОПТИЧЕСКИЙ НОСИТЕЛЬ | 2000 |
|
RU2204173C2 |
| ТРАКТОР | 2001 |
|
RU2255869C2 |

