Уровень техники
1. Область техники, к которой относится изобретение
[0001] Изобретение относится к устройству управления амортизацией колебаний транспортного средства, такого как автомобиль. Более конкретно, изобретение связано с устройством управления амортизацией колебаний, которое подавляет колебание кузова транспортного средства, управляя выходной мощностью привода (движущей силой или вращающим моментом) транспортного средства, имеющего двигатель в качестве узла привода.
2. Описание предшествующего уровня техники
[0002] Колебания, такие как колебания раскачки/подпрыгивания, во время движения транспортного средства создаются вследствие тормозной или движущей силы (или силы инерции), которая действует на кузов транспортного средства во время ускорения или замедления транспортного средства, или другой внешней силы, которая действует на кузов транспортного средства. В это время эти силы отражаются посредством "крутящего момента колеса" (крутящего момента, прикладываемого между колесами и поверхностью дороги, с которой колеса контактируют), который прикладывается колесами (ведущими колесами, когда транспортное средство приводится в движение) к поверхности дороги. Таким образом, в области управления амортизацией колебаний транспортных средств было предложено регулировать крутящий момент колеса посредством управления выходной мощностью привода - двигателя или другого узла привода транспортного средства с тем, чтобы подавлять колебание кузова транспортного средства во время движения транспортного средства (см., например, публикацию японской патентной заявки № 2004-168148 (JP 2004-168148 A), публикацию японской патентной заявки № 2006-69472 (JP 2006-69472 A), публикацию японской патентной заявки № 2008-105471 (JP 2008-105471 A), публикацию японской патентной заявки № (2008-105472 (JP 2008-105472 A) и публикацию японской патентной заявки № 2009-40163 (JP 2009-40163 A)). В управлении амортизацией колебаний, использующем управление выходной мощностью привода, как описано выше, колебание раскачки/подпрыгивания, которое возникает в кузове транспортного средства, когда запрос ускорения/замедления транспортного средства выполняется, или когда внешняя сила (возмущение) действует на кузов транспортного средства и вызывает изменения в крутящем моменте колеса, прогнозируется с помощью модели движения, созданной на основе динамической модели так называемого колебания подрессоренной массы или колебания подрессоренной массы и неподрессоренной массы кузова транспортного средства, и выходная мощность привода - узла привода транспортного средства регулируется так, чтобы подавлять прогнозируемое колебание. Управление амортизацией колебаний этого типа имеет преимущество в том, что операция амортизации колебания выполняется относительно быстро и энергоэффективность является хорошей. Это обусловлено тем, что формирование колебательной энергии может сдерживаться или подавляться посредством регулирования источника силы, который формирует колебание, вместо пресечения сформированной колебательной энергии посредством поглощения ее через управление амортизацией колебаний, использующее подвески, например. Также в управлении амортизацией колебаний, как описано выше, предмет управления ограничивается крутящим моментом колеса или тормозной или движущей силой колеса; следовательно, управление может относительно легко регулироваться.
[0003] Между тем, во время поворота транспортного средства сила, возникающая при повороте, сопротивление, возникающее при повороте, и т.д. действуют на шину каждого колеса. Также крутящий момент колеса изменяется вследствие изменения нагрузки прижимания к земле или контакта с дорогой под действием центробежной силы во время поворота. Следовательно, предпочтительно регулировать входной сигнал крутящего момента колеса, который передается по каналу обратной связи в управлении амортизацией колебаний, через управление выходной мощностью привода, как описано выше, способом, отличным от времени, когда транспортное средство движется прямо. Более конкретно, если угол рулевого управления предоставляется шине во время поворота транспортного средства, сопротивление, возникающее при повороте, формируется в направлении, противоположном направлению движения транспортного средства, и сумма компонентов возникающего при повороте сопротивления и возникающей при повороте силы в направлении вращения колеса (сопротивление качению) возникает в направлении, противоположном направлению вращения. Результирующая сила прикладывается в таком направлении, чтобы уменьшать крутящий момент колеса с тем, чтобы уменьшать вращение колеса. Таким образом, в JP 2008-105471 A было предложено увеличивать величину управления для управления амортизацией колебаний, так, чтобы компенсировать уменьшение крутящего момента колеса, во время поворота транспортного средства. С другой стороны, если крутящий момент колеса начинает изменяться в направлении уменьшения в начале поворота транспортного средства, и крутящий момент на валу привода увеличивается с тем, чтобы увеличивать крутящий момент колеса при управлении амортизацией колебаний, в ответ на уменьшение крутящего момента колеса крутящий момент на валу привода быстро увеличивается, если угол рулевого управления быстро изменяется, и транспортное средство поворачивает быстро. В результате водитель может получать ощущение небезопасности. Таким образом, в JP 2008-105472 A было предложено прекращать управление движущей силой на основе крутящего момента колеса, когда скорость изменения угла рулевого управления больше предварительно определенного значения.
[0004] Движение транспортного средства в ситуации, когда транспортное средство поворачивает во время управления амортизацией колебаний для подавления колебания кузова транспортного средства посредством управления выходной мощностью привода, будет описано более подробно. Первоначально, как правило, когда водитель управляет рулевым колесом, и транспортное средство начинает поворачивать, сопротивление качению увеличивается на каждом колесе (сопротивление поворачиванию), как описано выше. В результате происходит опускание носовой части кузова транспортного средства. Затем нагрузка прижимания к земле передних колес увеличивается вследствие опускания носовой части. В результате возникающая при повороте сила увеличивается, и момент рыскания увеличивается, так что угловая скорость рыскания эффективно проявляется или увеличивается. Однако если управление амортизацией колебаний выполняется во время руления в начале поворота транспортного средства, влиянием функций управления является устранение опускания носовой части, в связи с чем, нагрузка прижимания к земле передних колес уменьшается, по сравнению со случаем, когда управление амортизацией колебаний не выполняется. В результате момент рыскания уменьшается, и реакция угловой скорости рыскания (быстрота увеличения) ухудшается. Ухудшение реакции угловой скорости рыскания может вынуждать водителя чувствовать себя странно или некомфортно. Между тем, даже если управление амортизацией колебаний полностью прекращается во время операции рулевого управления, как в JP 2008-105472 A, водитель может чувствовать себя странно или некомфортно. Это обусловлено тем, что влияние управления амортизацией колебаний внезапно устраняется, или реакция угловой скорости рыскания быстро изменяется. В этой связи аналогичное явление может также возникать, когда угол рулевого управления возвращается к 0 во время поворота транспортного средства.
Сущность изобретения
[0005] Это изобретение предоставляет устройство управления колебаниями и систему управления колебаниями, которые выполняют управление амортизацией колебаний для подавления колебания кузова транспортного средства, управляя крутящим моментом колеса посредством управления выходной мощностью привода, в то же время сдерживая ухудшение реакции угловой скорости рыскания вследствие выполнения управления амортизацией колебаний во время поворота транспортного средства, так что водитель менее или наименее вероятно должен чувствовать себя странно или некомфортно.
[0006] Устройство управления амортизацией колебаний, которое управляет выходной мощностью привода транспортного средства с тем, чтобы подавлять колебание раскачки/подпрыгивания, вызванное раскачкой или подпрыгиванием транспортного средства, согласно первому аспекту изобретения, включает в себя: блок управления амортизацией колебаний, который управляет вращающим моментом транспортного средства так, чтобы уменьшать амплитуду колебания раскачки/подпрыгивания, на основе крутящего момента колеса, прикладываемого к колесам транспортного средства и формируемого в местоположении, где колеса соприкасаются с поверхностью дороги, и блок регулирования компонента компенсации, который уменьшает амплитуду компонента компенсации, который корректирует крутящий момент колеса, вычисленный посредством блока управления амортизацией колебаний, так, чтобы подавлять колебание раскачки/подпрыгивания, когда величина скорости изменения угла рулевого управления транспортного средства увеличивается. Здесь "крутящий момент колеса" может быть обнаруженным значением крутящего момента, который фактически формируется на колесах, или может быть расчетным значением крутящего момента колеса, рассчитанным из скоростей колес для колес. "Компонент компенсации" – это величина управления, которая предоставляется блоку управления выходной мощностью привода под управлением амортизацией колебаний для регулирования "крутящего момента колеса" с тем, чтобы уменьшать амплитуду колебания раскачки или подпрыгивания.
[0007] Как и в случаях устройств управления амортизацией колебаний, описанных в JP 2004-168148 A, JP 2006-69472 A, JP 2008-105471 A, JP 2008-105472 A и JP 2009-40163 A, устройство управления амортизацией колебаний этого изобретения конфигурируется в основном, чтобы управлять выходной мощностью привода так, чтобы изменять крутящий момент колеса в таком направлении, чтобы компенсировать или подавлять колебание раскачки/подпрыгивания кузова транспортного средства. С устройством, сконфигурированным таким образом, в то время как угол рулевого управления транспортного средства изменяется, а именно в то время как значительная скорость изменения угла рулевого управления формируется, величина компонента компенсации уменьшается, когда величина скорости изменения угла рулевого управления увеличивается. С этой конфигурацией, в то время как угол рулевого управления изменяется (в таком направлении, чтобы увеличивать свою величину), а именно в то время как момент рыскания увеличивается в транспортном средстве, и направление поворота транспортного средства изменяется, влияние управления амортизацией колебаний для подавления колебания раскачки или подпрыгивания уменьшается. В результате некоторая степень опускания носовой части возникает в кузове транспортного средства, и нагрузка прижимания к земле увеличивается, в то время как момент рыскания значительно увеличивается, по сравнению с нагрузкой и моментом во время устойчивого движения; следовательно, ухудшение реакции угловой скорости рыскания вследствие управления амортизацией колебаний может сдерживаться до некоторой степени. Также с конфигурацией, в которой величина компонента компенсации уменьшается, когда величина скорости изменения угла рулевого управления увеличивается, не допускается внезапное устранение воздействия от управления амортизацией колебаний; следовательно, никаких быстрых изменений не возникает в выходной мощности привода и состоянии колебания кузова транспортного средства, и водительское ощущение странности, как ожидается, должно уменьшиться. В этой связи, даже когда угол рулевого управления изменяется, чтобы возвращаться к 0, с тем, чтобы приводить транспортное средство, которое находится в состоянии поворота, обратно в состояние движения по прямой, также величина компонента компенсации может быть уменьшена, как описано выше. Когда угол рулевого управления изменяется, чтобы возвращаться к 0, сопротивление качению каждой шины уменьшается; следовательно (если не существует управления амортизацией колебаний), положение кузова транспортного средства изменяется в направлении задирания носовой части, в связи с чем, нагрузка прижимания к земле передних колес уменьшается, возникающая при повороте сила уменьшается, и угловая скорость рыскания быстро уменьшается. Однако в то время как управление амортизацией колебаний выполняется, управление функционирует, чтобы компенсировать изменение в положении кузова транспортного средства в направлении задирания носовой части, и нагрузка прижимания к земле передних колес увеличивается, по сравнению со случаем, когда управление амортизацией колебаний не выполняется. Соответственно, возникающая при повороте сила уменьшается с уменьшенной скоростью и реакция (быстрота уменьшения) угловой скорости рыскания ухудшается. Соответственно, если компонент компенсации (величина управления) уменьшается на основе скорости изменения угла рулевого управления, как описано выше, положение кузова транспортного средства изменяется в направлении задирания носовой части, и реакция угловой скорости рыскания менее вероятно или маловероятно должна ухудшиться.
[0008] В вышеописанном аспекте изобретения коэффициент усиления системы управления компонента компенсации, а именно коэффициент усиления, который определяет величину компонента компенсации, когда он предоставляется для выходной мощности привода, может зависеть от величины скорости изменения угла рулевого управления, и блок регулирования компонента компенсации может устанавливать коэффициент усиления компонента компенсации так, что коэффициент усиления монотонно уменьшается, когда величина скорости изменения угла рулевого управления транспортного средства увеличивается, когда величина скорости изменения угла рулевого управления транспортного средства меньше предварительно определенной скорости. С этой конфигурацией, когда скорость изменения угла рулевого управления транспортного средства изменяется, коэффициент усиления системы управления компонента компенсации изменяется непрерывно; следовательно, влияние управления амортизацией колебаний постоянно изменяется и водитель менее вероятно или маловероятно должен чувствовать себя странно или некомфортно относительно изменения в управлении.
[0009] Дополнительно, что касается вышеописанного управления амортизацией колебаний, влияние управления амортизацией колебаний уменьшается, когда величина скорости изменения угла рулевого управления транспортного средства увеличивается; однако все-таки предпочтительно поддерживать влияние управления амортизацией колебаний до некоторой степени без полного его устранения. Таким образом, устройство согласно вышеописанному аспекту изобретения может быть сконфигурировано так, чтобы дополнительно не уменьшать амплитуду компонента компенсации, когда величина скорости изменения угла рулевого управления транспортного средства становится больше предварительно определенной скорости. В вышеописанном аспекте изобретения блок регулирования компонента компенсации может делать скорость уменьшения амплитуды компонента компенсации относительно амплитуды колебания раскачки/подпрыгивания постоянной, когда величина скорости изменения угла рулевого управления транспортного средства превышает предварительно определенную скорость. Когда величина компонента компенсации, предоставленного выходной мощности привода, определяется по коэффициенту усиления системы управления, коэффициент усиления системы управления уменьшается с величиной скорости изменения угла рулевого управления. Однако когда величина скорости изменения угла рулевого управления достигает предварительно определенной скорости, или коэффициент усиления системы управления уменьшается вплоть до предварительно определенного значения, коэффициент усиления системы управления может дополнительно не уменьшаться.
[0010] Система управления амортизацией колебаний согласно второму аспекту изобретения включает в себя блок привода, который формирует движущую силу на колесах транспортного средства, датчик скорости колеса, который определяет скорость вращения каждого из колес транспортного средства, датчик угла рулевого управления, который определяет угол поворота рулевого колеса транспортного средства, и электронный блок управления, который получает первую движущую силу согласно величине нажатия педали акселератора и приводит в действие узел привода со второй движущей силой, которая определяется посредством компонента компенсации, с помощью которого первая движущая сила корректируется так, чтобы подавлять колебание раскачки/подпрыгивания транспортного средства, на основе первой движущей силы и скорости вращения. В системе электронный блок управления уменьшает амплитуду компонента компенсации, по мере того как величина скорости изменения угла рулевого управления, полученная из угла рулевого управления, увеличивается.
[0011] Таким образом, согласно изобретению, как описано выше, в то время как водитель управляет рулевым колесом, например, угол поворота колес изменяется, компонент компенсации (величина управления) крутящего момента колеса, предоставленного в управление выходной мощностью привода для управления амортизацией колебания, уменьшается в соответствии с увеличением скорости изменения угла рулевого управления. При функционировании такого управления, когда транспортное средство начинает поворачивать, или направление поворота изменяется в таком направлении, чтобы увеличивать величину угла рулевого управления, функционирование или действие амортизации колебаний, которое ведет к уменьшенному опусканию носовой части, уменьшается, так что момент рыскания может в значительной степени создаваться или увеличиваться, и угловая скорость рыскания может увеличиваться быстрее. Когда транспортное средство прекращает поворачивать, или направление поворота изменяется в таком направлении, чтобы уменьшать величину угла рулевого управления, функционирование или действие амортизации колебаний, которое ведет к уменьшенному задиранию носовой части, уменьшается, так что момент рыскания может более быстро уменьшаться, и угловая скорость рыскания может более оперативно уменьшаться. Затем, поскольку степень уменьшения влияния управления амортизацией колебаний изменяется с изменением в величине скорости изменения угла рулевого управления, влияние управления амортизацией колебаний внезапно не изменяется, и водитель менее вероятно или маловероятно должен чувствовать себя странно или некомфортно. Следует понимать в вышеописанной конфигурации, что влияние управления амортизацией колебаний уменьшается согласно изобретению только в случае, когда скорость изменения угла рулевого управления является существенным значением. А именно, в то время как транспортное средство движется прямо или в то время как транспортное средство находится в процессе равномерного поворота (угол рулевого управления является постоянным, и скорость изменения угла рулевого управления равна 0), влияние управления амортизацией колебаний согласно изобретению не уменьшается. Соответственно, если не существует другого управления для уменьшения влияния управления амортизацией колебаний, влияние управления амортизацией колебаний проявляется или обеспечивается на нормальном уровне, и колебание раскачки/подпрыгивания подавляется во время равномерного поворачивания транспортного средства. Уменьшение влияния управления амортизацией колебаний согласно этому изобретению выполняется, только когда направление поворота транспортного средства изменяется, и угловая скорость рыскания изменяется (а именно, когда угол рулевого управления изменяется, так что сопротивление качению шин изменяется, и крутящий момент колеса изменяется).
[0012] Согласно вышеописанному аспекту изобретения может быть предоставлено устройство управления амортизацией колебаний, которое улучшено так, что влияние управления амортизацией колебаний быстро не изменяется во время действия рулевого управления водителем.
Краткое описание чертежей
[0013] Признаки, преимущества и техническое и промышленное значение примерных вариантов осуществления изобретения будут описаны ниже со ссылкой на сопровождающие чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
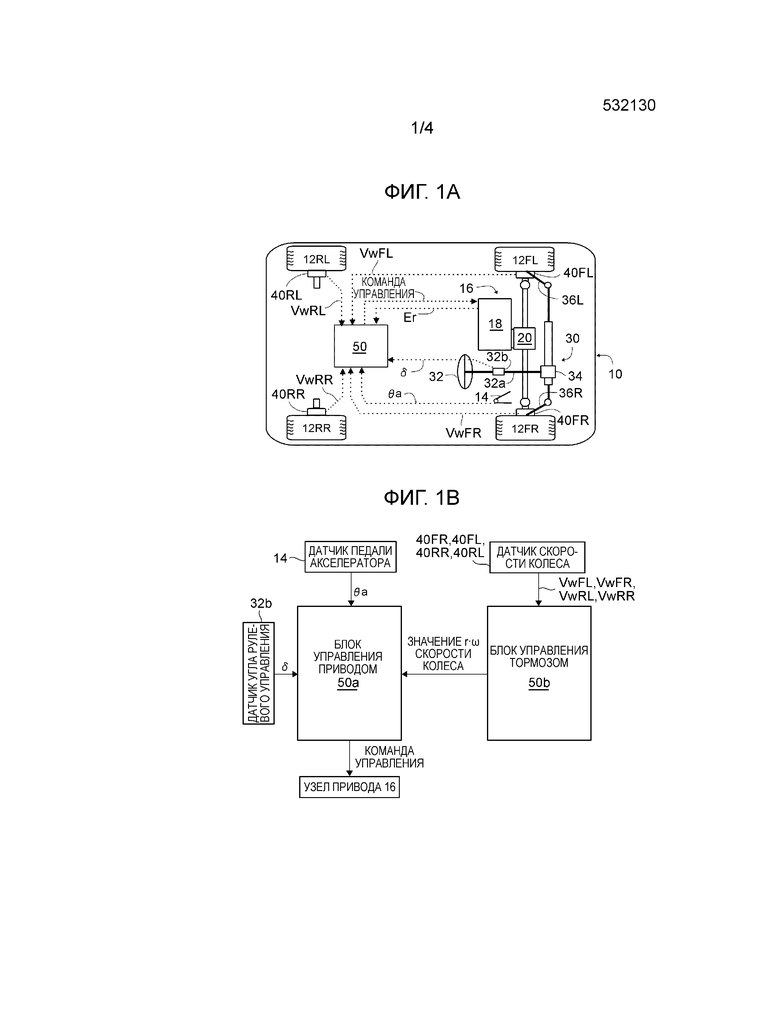
фиг.1A – это схематичный вид автомобиля, в котором устройство управления амортизацией колебаний в качестве предпочтительного варианта осуществления изобретения реализуется;
фиг.1B – это схематичный вид, показывающий внутреннюю конфигурацию электронного блока управления на фиг.1A более подробно;
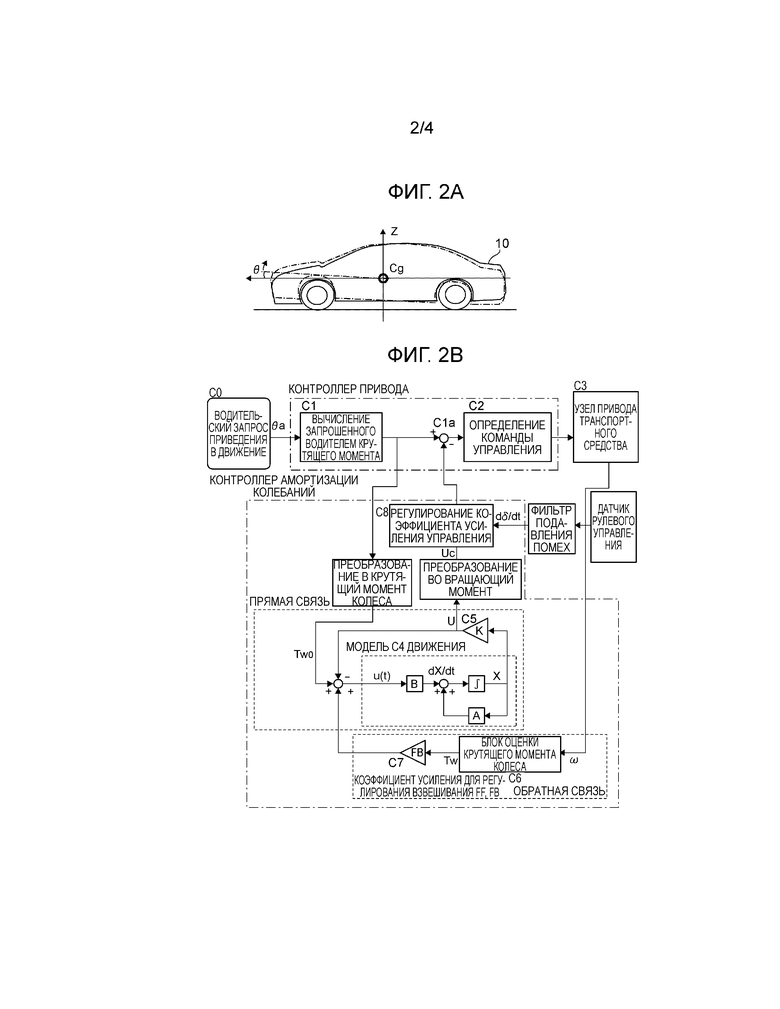
фиг.2A – это вид, полезный для объяснения переменных состояния колебания кузова транспортного средства, подавляемого посредством устройства управления амортизацией колебаний в качестве одного предпочтительного варианта осуществления изобретения;
фиг.2B – это вид в форме блок-схемы управления, показывающей конфигурацию управления амортизацией колебаний согласно предпочтительному варианту осуществления изобретения;
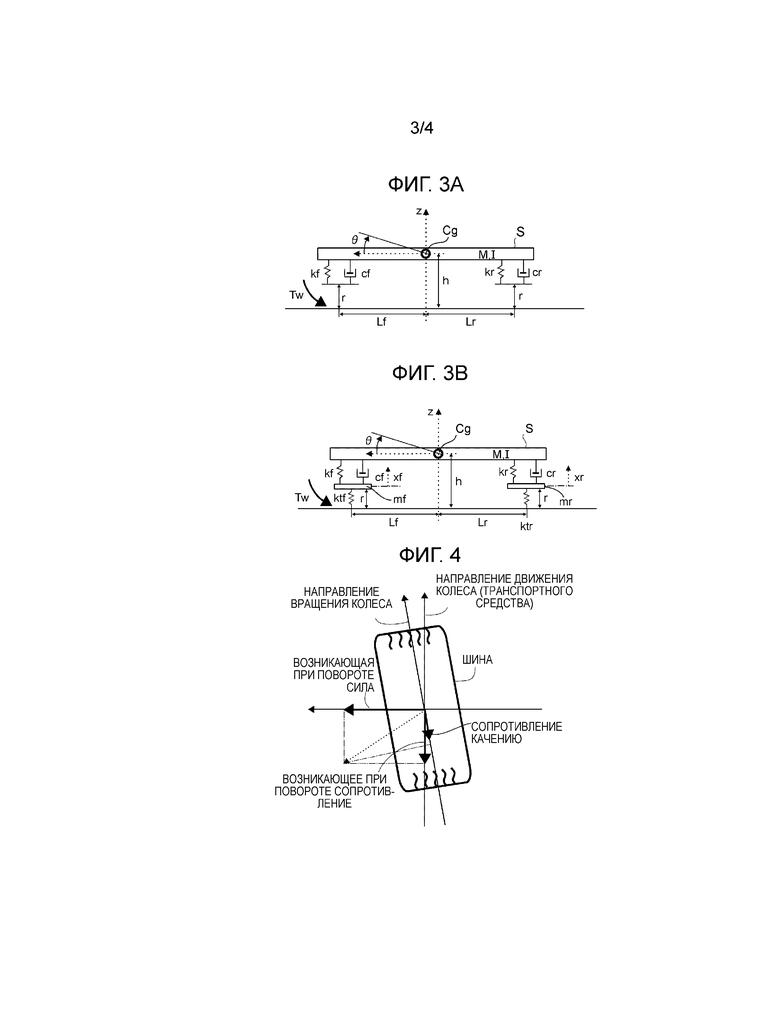
фиг.3A и фиг.3B – это виды, иллюстрирующие динамические модели движения колебания кузова транспортного средства, рассматриваемые в устройстве управления амортизацией колебаний предпочтительного варианта осуществления изобретения, при этом фиг.3A показывает случай, когда используется модель колебаний подрессоренной массы, а фиг.3B показывает случай, когда используется модель колебаний подрессоренной/неподрессоренной массы;
фиг.4 – это вид, полезный для объяснения сопротивления качению, формируемого в колесе, которое поворачивается посредством руления;
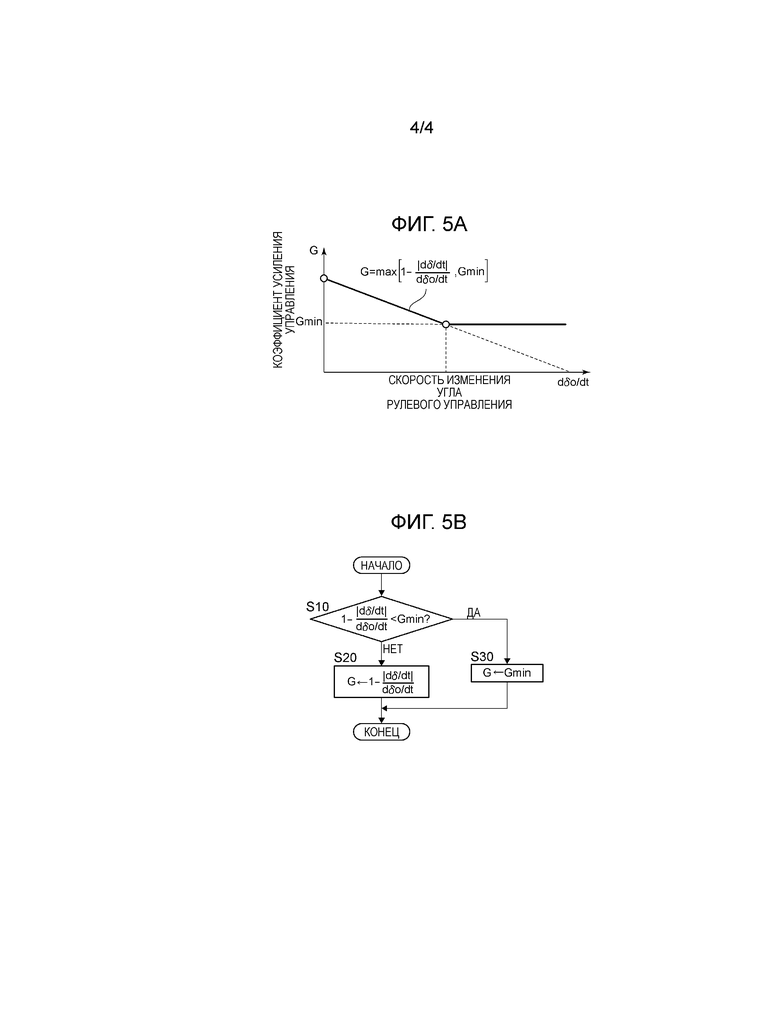
фиг.5A – это вид в форме графика, указывающего изменение коэффициента усиления управления для компонента компенсации, с помощью которого корректируется крутящий момент колеса, относительно скорости изменения угла рулевого управления;
фиг.5B – это вид в форме блок-схемы последовательности операций, иллюстрирующей обработку для определения коэффициента усиления управления.
Подробное описание вариантов осуществления
[0014] Обращаясь к сопровождающим чертежам, некоторые предпочтительные варианты осуществления изобретения будут описаны подробно. На чертежах одинаковые номера ссылок обозначают одинаковые части или компоненты.
[0015] Конфигурация устройства
Фиг.1A схематично показывает автомобиль, на котором установлено устройство управления амортизацией колебаний согласно предпочтительному варианту осуществления изобретения. На фиг.1A транспортное средство, имеющее левое и правое передние колеса 12FL, 12FR и левое и правое задние колеса 12RL, 12RR, оснащается узлом 16 привода, который формирует движущую силу по отношению к передним колесам согласно нажатию педали 14 акселератора водителем, в обычном режиме, и устройство 30 рулевого управления, которое поворачивает левое и правое передние колеса. В иллюстрированном варианте осуществления узел 16 привода конфигурируется, чтобы передавать вращающий момент или вращательную движущую силу от двигателя 18 к передним колесам 12FL, 12FR через коробку 20 передач в блоке с трансмиссией. Узел 16 привода может быть узлом электропривода, использующим электромотор вместо двигателя 18, или может быть узлом привода гибридного типа, имеющим как двигатель, так и электромотор. Устройство 30 рулевого управления передает вращение рулевого колеса 32, поворачиваемого водителем, рулевым поперечным тягам 36L, 36R через механизм 34 рулевой передачи, с тем, чтобы поворачивать передние колеса 12FL, 12FR. Транспортное средство может быть транспортным средством с приводом на четыре колеса, в котором движущая сила передается задним колесам, также как и передним колесам. Хотя не иллюстрировано на чертеже ради простоты, транспортное средство 10 снабжается тормозной системой, которая формирует тормозную силу для соответствующих колес, аналогично обычным транспортным средствам.
[0016] Работа узла 16 привода управляется посредством электронного блока 50 управления. Электронный блок 50 управления может включать в себя микрокомпьютер, имеющий CPU, ROM, RAM и устройство порта ввода/вывода, которые соединяются друг с другом через двухстороннюю общую шину обычного типа, и схему возбуждения. Конфигурация и работа каждого блока устройства управления амортизацией колебаний изобретения, как описано позже, может быть реализована посредством работы электронного блока (компьютера) 50 управления согласно программам. Электронный блок 50 управления принимает сигналы, указывающие скорости Vwi (i=FL, FR, RL, RR) колес от датчиков 40i (i=FL, FR, RL, RR) скорости колес, установленных на соответствующих колесах, и сигналы, такие как скорость Er вращения двигателя и величина θa нажатия педали акселератора, от датчиков, предусмотренных в соответствующих частях транспортного средства, и угол δ рулевого управления от датчика 32b угла рулевого управления, предусмотренного на валу 32a рулевого управления. Следует понимать, что электронный блок 50 управления может также принимать различные сигналы обнаружения, отличные от вышеуказанных сигналов, для получения различных параметров, необходимых для того, чтобы различные управления выполнялись в транспортном средстве этого варианта осуществления. Например, электронный блок 50 управления может принимать угловую скорость рыскания, определенную посредством датчика угловой скорости рыскания, поперечное ускорение, обнаруженное посредством G-датчика, и информацию о позиции передачи коробки передач.
[0017] Фиг.1B – это схематичный вид, показывающий внутреннюю конфигурацию электронного блока 50 управления более подробно. Электронный блок 50 управления может состоять из блока 50a управления приведением в движение, который управляет работой узла 16 привода, и блока 50b управления торможением, который управляет работой тормозной системы (не показана). Устройство управления торможением принимает сигнал от датчика 40i скорости колеса каждого колеса и вычисляет скорость ω вращения колеса. Затем значение скорости колеса для каждого колеса вычисляется умножением скорости ω вращения на радиус r колеса, и значение скорости колеса передается в блок 50a управления приведением в движение для использования в вычислении расчетного значения крутящего момента колеса, которое будет описано ниже. Вычисление для преобразования скорости вращения колеса в скорость колеса может быть выполнено посредством блока 50a управления приведением в движение. В этом случае скорость вращения колеса предоставляется из блока 50b управления торможением в блок 50a управления приведением в движение. Также угол δ рулевого управления предоставляется от датчика 32b угла рулевого управления в блок 50a управления приведением в движение с целью, которая будет описана ниже более подробно.
[0018] В блоке 50a управления приводом запрос приведения в движение от водителя, т.е. целевой выходной крутящий момент (запрашиваемый водителем крутящий момент) узла привода, запрашиваемый водителем, определяется на основе величины θa нажатия педали акселератора (и скорости транспортного средства, информации о позиции передачи и т.д.). Однако блок управления приведением в движение изобретения корректирует запрашиваемый водителем крутящий момент так, чтобы выполнять управление амортизацией колебания раскачки/подпрыгивания на кузове транспортного средства через управление движущей силой, и отправляет управляющую команду, соответствующую скорректированному запрашиваемому крутящему моменту, в узел 16 привода. В управлении амортизацией колебаний (1) раскачки/подпрыгивания вычисление расчетного значения крутящего момента колеса для ведущих колес на основе силы, прикладываемой между ведущими колесами и поверхностью дороги, (2) вычисление величины состояния колебания раскачки/подпрыгивания на основе модели движения колебания кузова транспортного средства и (3) вычисление компонента компенсации (величины корректировки) крутящего момента колеса, который подавляет или уменьшает величины состояния колебания раскачки/подпрыгивания, и компенсация запрошенного крутящего момента на основе компонента компенсации выполняются. Следует понимать, что устройство управления амортизацией колебаний изобретения реализуется посредством обработки операций (1)–(3).
[0019] Конфигурация управления движущей силой для выполнения управления амортизацией колебаний раскачки/подпрыгивания на кузове транспортного средства
В транспортном средстве 10, как иллюстрировано на фиг.2A в качестве примера, если узел привода работает на основе водительского запроса приведения в движение и крутящий момент колеса колеблется, колебание подпрыгивания может возникать в вертикальном направлении (z-направлении) центра тяжести Cg кузова транспортного средства и колебание раскачки может возникать в направлении раскачки (θ-направлении) относительно центра тяжести кузова транспортного средства. Также если внешняя сила или крутящий момент (возмущение) прикладывается от поверхности дороги на колесо(а) во время движения транспортного средства, возмущение может быть передано транспортному средству и колебание может быть сформировано в кузове транспортного средства в направлении подпрыгивания и направлении раскачки. Таким образом, в иллюстрированном варианте осуществления формируется модель движения колебания раскачки/подпрыгивания кузова транспортного средства, и переменные состояния колебания кузова транспортного средства, т.е. смещения z, θ и скорости их изменения dz/dt, d θ/dt, когда модель принимает запрашиваемый водителем крутящий момент (значение крутящего момента колеса, в которое запрашиваемый водителем крутящий момент преобразуется), и текущий крутящий момент колеса (его расчетное значение) вычисляются. Затем вращающий момент узла привода регулируется (запрашиваемый водителем крутящий момент корректируется), так что переменные состояния, полученные из модели, сводятся к нулю, а именно, колебание раскачки/подпрыгивания подавляется.
[0020] Фиг.2B схематично иллюстрирует конфигурацию управления движущей силой согласно этому варианту осуществления изобретения в форме блоков управления. Работа каждого блока управления (кроме C0, C3) выполняется посредством блока 50a управления приведением в движение или блока 50b управления торможением электронного блока 50 управления. Обращаясь к фиг.2B, конфигурация для управления движущей силой этого варианта осуществления изобретения в целом состоит из контроллера привода, который предоставляет водительский запрос приведения в движение транспортному средству, и контроллера амортизации колебаний, который регулирует водительский запрос приведения в движение так, чтобы подавлять колебание раскачки/подпрыгивания кузова транспортного средства. В контроллере привода водительский запрос приведения в движение, а именно, величина (C0) нажатия педали акселератора, преобразуется в запрошенный водителем крутящий момент (C1) обычным образом, и затем запрошенный водителем крутящий момент преобразуется в команду управления для узла привода (C2) и передается узлу привода (C3). Команда управления является целевым открытием дроссельной заслонки, когда узел привода является бензиновым двигателем, и является целевым количеством впрыска топлива, когда он является дизельным двигателем, в то время как команда управления является целевой величиной тока, когда узел привода является электромотором.
[0021] С другой стороны, контроллер амортизации колебаний состоит из секции управления с прямой связью и секции управления с обратной связью. Секция управления с прямой связью имеет конфигурацию так называемого оптимального регулятора, в котором секция (C4) модели движения колебания раскачки/подпрыгивания кузова транспортного средства принимает значение (запрошенный крутящий момент Tw0 колеса), полученное посредством преобразования запрошенного водителем крутящего момента из C1 в крутящий момент колеса. В секции (C4) модели движения вычисляются переменные состояния кузова транспортного средства в ответ на принятый крутящий момент. В секции (C5) управления с прямой связью вычисляется величина корректировки запрашиваемого водителем крутящего момента колеса для минимизации переменных состояния, а именно, компонент компенсации для регулирования крутящего момента колеса. В секции управления с обратной связью, с другой стороны, расчетное значение Tw крутящего момента колеса вычисляется посредством обработки, которая будет описана позже, в блоке (C6) оценки крутящего момента колеса. Затем расчетное значение крутящего момента колеса умножается на FB-коэффициент усиления (коэффициент усиления для регулирования баланса между долями запрашиваемого водителем крутящего момента Tw0 колеса и расчетного значения Tw крутящего момента колеса в модели движения), и затем добавляется в качестве входного возмущения к запрашиваемому водителем крутящему моменту, чтобы быть принятым посредством секции (C4) модели движения. Таким образом, компонент компенсации для запрошенного водителем крутящего момента колеса относительно возмущения также вычисляется. Компонент компенсации запрошенного водителем крутящего момента колеса для C5 преобразуется в единицу запрошенного крутящего момента узла привода и передается в сумматор (C1a). Таким образом, после того как запрошенный водителем крутящий момент, который был отрегулирован так, что колебание раскачки/подпрыгивания не формируется, преобразуется в команду (C2) управления, которая, в свою очередь, передается в узел (C3) привода.
[0022] В вышеописанной конфигурации, для того чтобы сдерживать снижение реакции угловой скорости рыскания вследствие выполнения управления амортизацией колебаний и помогать водителю чувствовать себя менее странно или некомфортно, в то время как угол поворота ведущих колес (передних колес) изменяется во время поворота транспортного средства, амплитуда компонента компенсации крутящего момента колеса, принятого сумматором C1a, уменьшается, когда скорость изменения угла рулевого управления увеличивается, в случае этого изобретения. Для этого в устройстве управления амортизацией колебаний этого варианта осуществления, как описано выше, предусматривается блок (C8) регулирования коэффициента усиления управления, как показано на фиг.2, для регулирования коэффициента усиления управления компонента компенсации крутящего момента колеса согласно скорости изменения угла рулевого управления, со ссылкой на обнаруженное значение угла рулевого управления, полученного от датчика угла рулевого управления. Обнаруженное значение угла рулевого управления проходит через фильтр, который устраняет помехи из обнаруженного значения, и затем передается в блок (C8) регулирования коэффициента усиления управления.
[0023] Принцип управления амортизацией колебаний
В управлении амортизацией колебаний согласно варианту осуществления изобретения рассматривается динамическая модель движения колебания подпрыгивания и колебания раскачки кузова транспортного средства, и формируются уравнения состояния переменных состояния в направлении подпрыгивания и направлении раскачки, когда принимается запрошенный водителем крутящий момент Tw0 колеса и расчетное значение Tw крутящего момента колеса (возмущение) в качестве входных данных. Затем из уравнений состояния входные данные (значение крутящего момента), которые уменьшают переменные состояния в направлении подпрыгивания и направлении раскачки до нуля с помощью теории оптимального регулятора, определяются, и запрошенный водителем крутящий момент корректируется на основе полученного значения крутящего момента.
[0024] В качестве динамической модели направления подпрыгивания и направления раскачки кузова транспортного средства кузов транспортного средства рассматривается как твердое тело S, имеющее массу M и момент инерции I, и твердое тело S, как предполагается, поддерживается посредством подвески передних колес, имеющей модуль упругости kf и коэффициент cf демпфирования, и подвески задних колес, имеющей модуль упругости kr и коэффициент cr демпфирования, как показано на фиг.3A, например. А именно, динамическая модель движения, показанная на фиг.3A, является моделью колебания подрессоренной массы кузова транспортного средства. В этом случае уравнение движения в направлении подпрыгивания и уравнение движения в направлении раскачки центра тяжести кузова транспортного средства выражаются как в уравнении (1a) и уравнении (1b) ниже.
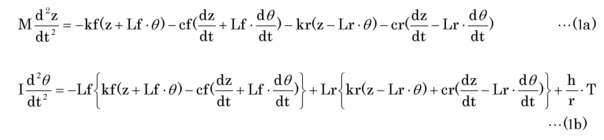
где Lf, Lr – это расстояния от центра тяжести до оси передних колес и оси задних колес, соответственно, r – это радиус колеса, а h – это высота центра тяжести от поверхности дороги. В уравнении (1a) первое и второе выражения представляют компонент усилия, прилагаемого от оси передних колес, а третье и четвертое выражения представляют компонент усилия, прилагаемого от оси задних колес. В уравнении (1b) первое выражение представляет моментальный компонент усилия от оси передних колес, а второе выражение представляет моментальный компонент усилия от оси задних колес. Третье выражение в уравнении (1b) представляет моментальный компонент усилия, предоставляемого посредством крутящего момента T (=Two+Tw) колеса, сформированного на приводных колесах вокруг центра тяжести кузова транспортного средства.
[0025] Вышеуказанные уравнения (1a) и (1b) могут быть написаны в форме уравнения состояния (линейной системы), как указано посредством следующего уравнения (2a), где смещение z кузова транспортного средства, θ, и степени их изменения dz/dt, d θ/dt составляют вектор X(t) переменной состояния.
dX(t)/dt=A⋅(×)X(t)+B⋅(×)u(t) (2a)
где X(t), А и B являются:

Соответствующие элементы a1-a4 и b1-b4 матрицы A задаются посредством собирательных коэффициентов z, θ, dz/dt и dθ/dt в уравнениях (1a) и (1b) и выражаются следующим образом: a1=-(kf+kr)/M, a2=-(cf+cr)/M, a3=-(kf⋅Lf-kr⋅Lr)/M, a4=-(cf⋅Lf-cr⋅Lr)/M, b1=-(Lf⋅kf-Lr⋅kr)/I, b2=-(Lf⋅cf-Lr⋅cr)/I, b3=-(Lf2⋅kf+Lr2⋅kr)/I, b4=-(Lf2⋅cf+Lr2⋅cr)/I. Также u(t) равно T (u(t)=T) и является входными данными системы, представленной посредством уравнения (2a) состояния. Соответственно, элемент p1 матрицы B выражается следующим образом: p1=h/(I·r) из уравнения (1b) выше.
[0026] Когда u(t) равно -K·X(t) u(t)= -K·X(t) (2b)) в уравнении (2a) состояния, уравнение (2a) состояния будет следующим: dX(t)/dt=(A-BK)⋅X(t) (2c). Соответственно, когда первоначальные значения X0(t) для X(t) задаются так, что X0(t)=(0, 0, 0, 0) (предполагается, что не существует колебания, прежде чем крутящий момент принимается), и решается дифференциальное уравнение (2c) вектора X(t) переменной состояния, определяется значение u(t) крутящего момента, которое подавляет колебание раскачки/подпрыгивания, если определяется коэффициент K усиления для сведения величины X(t), т.е. смещения в направлении подпрыгивания и направлении раскачки и их степени изменения, к нулю.
[0027] Коэффициент K усиления может быть определен с помощью теории так называемого оптимального регулятора. Согласно этой теории, известно, что X(t) устойчиво сходится в уравнении (2a) состояния, когда значение функции оценки: J=1/2⋅∫(XTQX+uTRu)dt (3a) в качестве квадратичной функции (диапазон интеграла задается от 0 до ∞) минимизируется, и матрица K, которая минимизирует функцию J оценки, задается посредством K=R-1⋅BT⋅P. Здесь P является решением уравнения Риккати: -dP/dt=ATP+PA+Q-PBR-1BTP. Уравнение Риккати может быть решено любым способом, известным в области линейной системы, и коэффициент K усиления определяется посредством решения этого уравнения.
[0028] Q и R в оценочной функции J и уравнении Риккати являются полуположительно определенной симметричной матрицей и положительно определенной симметричной матрицей, соответственно, которые задаются произвольно, и они являются весовыми матрицами оценочной функции J, определенными разработчиком системы. Например, в случае модели движения, рассматриваемой в данном документе, если Q, R устанавливаются как следующие,
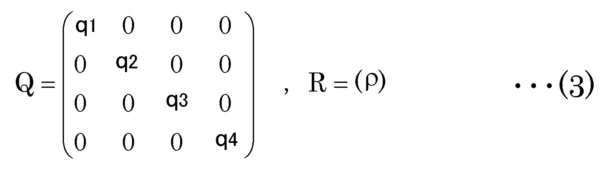
и нормы (величины) конкретных из компонентов вектора состояния, например, нормы для dz/dt, dθ/dt, задаются, чтобы быть больше норм других компонентов, например, z, θ в уравнении (3a), компоненты, нормы которых заданы более значительными, относительно более устойчиво сходятся. Если значения компонентов матрицы Q увеличиваются, переходная характеристика акцентируется, а именно, значения вектора состояния быстро сходятся к устойчивым значениям. Если значение матрицы R увеличивается, потребляемая энергия уменьшается.
[0029] При фактическом управлении амортизацией колебаний, как указано в блок-схеме на фиг.2B, вектор X(t) переменной состояния вычисляется посредством решения дифференциального уравнения для уравнения (2a) с помощью входного значения крутящего момента, в модели C4 движения. Затем, в C5, компонент U(t) компенсации, полученный умножением вектора X(t) состояния в качестве выходных данных модели C4 движения на коэффициент K усиления, определенный так, чтобы сводить вектор X(t) переменной состояния к нулю или минимальному значению, как описано выше, преобразуется в крутящий момент узла привода и вычитается из запрошенного водителем крутящего момента в сумматоре (C1a). Для вычисления модели C4 движения компонент U(t) компенсации также подается обратно во входное значение крутящего момента модели C4 движения (обратная связь по состоянию). Система, представленная уравнением (1a) и уравнением (1b), является резонансной системой, и значения вектора переменной состояния, реагирующие на какие-либо предоставленные входные данные, являются практически только компонентами собственной частоты системы. Соответственно, если система конфигурируется, чтобы вычитать U(t) (его преобразованное значение Uc) из запрошенного водителем крутящего момента, компонент собственной частоты системы в запрошенном водителем крутящем моменте, а именно, компонент, который индуцирует колебание раскачки/подпрыгивания в кузове транспортного средства, корректируется, и колебание раскачки/подпрыгивания кузова транспортного средства подавляется. Если компонент собственной частоты системы устраняется из запрошенного крутящего момента, предоставленного водителем, компонент собственной частоты системы, в команде запрошенного крутящего момента, принятой узлом привода, является только –U(t), и смещение колебания вследствие Tw (возмущения) сводится в одну точку.
[0030] В качестве динамической модели движения в направлении подпрыгивания и направлении раскачки кузова транспортного средства модель (модель колебания подрессоренной массы и неподрессоренной массы кузова транспортного средства), принимающая во внимание пружинящую упругость шин передних колес и задних колес, как показано на фиг.3B, может быть использована, в дополнение к конфигурации на фиг.3A. Если шины передних колес и задних колес имеют модули упругости ktf, ktr, соответственно, уравнение движения в направлении подпрыгивания и уравнение движения в направлении раскачки, центра тяжести кузова транспортного средства, выражаются следующим образом посредством уравнений (4a)-(4d), как понятно из фиг.3B.

где xf, xr – это величины смещения неподрессоренной массы передних колес и задних колес, а mf, mr – это неподрессоренные массы передних колес и задних колес. Уравнения (4a)-(4d) составляют уравнение состояния (в котором матрица A является матрицей 8×8, а матрица B является матрицей 8×1), как указано посредством уравнения (2a), как в случае на фиг.3A, в котором z, θ, xf, xr и дифференциальные значения по времени этих переменных используются для вектора переменной состояния. Затем матрица K коэффициентов усиления, которая может сводить величину вектора переменной состояния к нулю, может быть определена согласно теории оптимального регулятора. Фактическое управление амортизацией колебаний аналогично управлению случая на фиг.3.
[0031] (Вычисление расчетного значения крутящего момента колеса)
В секции управления с обратной связью контроллера амортизации колебаний на фиг.2B крутящий момент Tw колеса, принятый как возмущение посредством секции управления с прямой связью, может быть получен посредством оценки крутящего момента колеса, который фактически формируется на колесах, посредством любого предоставленного способа. Например, крутящий момент колеса может быть оценен согласно следующему уравнению (5) с помощью скорости ω вращения колеса, полученной от датчиков скорости вращения колес для ведущих колес, или дифференциала по времени значения r·ω скорости колеса.
Tw=M⋅r2⋅dω/dt …(5)
В уравнении (5) M – это масса транспортного средства, а r – это радиус колеса. Если сумма движущих сил, формируемых в фрагментах, где ведущие колеса касаются поверхности дороги, равна общей движущей силе M·G (где G – это ускорение) транспортного средства, крутящий момент Tw колеса получается по следующему уравнению (5a).
Tw=M⋅G⋅r …(5a)
Поскольку ускорение G транспортного средства получается посредством следующего уравнения (5b), из дифференциального значения скорости r·ω колеса, крутящий момент колеса оценивается согласно уравнению (5).
G=r⋅dω/dt …(5b)
(Корректировка управления амортизацией колебаний во время поворота транспортного средства)
[0032] Когда колесо поворачивается посредством рулевого управления, "сопротивление качению" возникает в колесе в направлении, противоположном направлению вращения колеса, как схематично изображено на фиг.4. Как хорошо известно в области техники, если направление вращения колеса отклоняется относительно направления движения (вверх на фиг.4) транспортного средства, шина колеса деформируется, в связи с чем возникающая при повороте сила возникает в направлении, перпендикулярном направлению движения транспортного средства, и возникающее при повороте сопротивление возникает в направлении, противоположном направлению движения транспортного средства. В это время сумма компонентов возникающего при повороте сопротивления и возникающей при повороте силы в направлении вращения колеса (сопротивление качению) возникает в направлении, противоположном направлению вращения колеса, и эта сила обеспечивает крутящий момент, который уменьшает вращение колеса. Соответственно, если колесо (ведущее колесо) поворачивается посредством рулевого управления во время приведения в движение транспортного средства, и направление вращения колеса сдвигается от направления движения транспортного средства, компонент крутящего момента колеса возникает в направлении, противоположном направлению вращения колеса. Поскольку компонент крутящего момента колеса в направлении, противоположном направлению вращения колеса, прикладывается в качестве тормозной силы к колесу, тормозная сила прикладывается к переднему колесу как управляемому колесу, и поведение с опусканием носовой части имеет место в кузове транспортного средства. В результате нагрузка прижимания к земле переднего колеса увеличивается, и возникающая при повороте сила эффективно формируется, так что момент рыскания формируется или увеличивается в направлении руления, и угловая скорость рыскания увеличивается.
[0033] Однако в случае когда вышеописанное управление амортизацией колебаний выполняется, в то время как руление выполняется, и компонент крутящего момента колеса формируется в направлении, противоположном направлению вращения колеса, компонент компенсации крутящего момента колеса формирует крутящий момент колеса, скорректированный в таком направлении, чтобы устранять компонент в направлении, противоположном направлению вращения колеса. В результате характер опускания носовой части кузова транспортного средства подавляется, нагрузка прижимания к земле не увеличивается. Таким образом, момент рыскания, который возникает в направлении рулевого управления, уменьшается (по сравнению со случаем, когда управление амортизацией колебаний не выполняется) и темп увеличения угловой скорости рыскания уменьшается. А именно, реакция угловой скорости рыскания ухудшается. Эти явления имеют место, только пока угол рулевого управления изменяется. Соответственно, когда угол рулевого управления находится в постоянном состоянии, и транспортное средство выполняет плавный поворот, предпочтительно подавлять колебание кузова транспортного средства вследствие колебаний в крутящем моменте колеса, вызванных возмущением от дороги, или т.п.
[0034] Таким образом, согласно изобретению, скорость изменения угла рулевого управления вычисляется из обнаруженных значений угла рулевого управления от датчика угла рулевого управления, как объяснено выше со ссылкой на фиг.2B. Когда скорость изменения угла рулевого управления является существенным значением, а именно, в то время как угол рулевого управления увеличивается, и сопротивление качению увеличивается, влияние управления амортизацией колебаний уменьшается, на основе скорости изменения угла рулевого управления, для того, чтобы сдерживать ухудшение реакции угловой скорости рыскания.
[0035] Более конкретно, в блоке регулирования коэффициента усиления управления на фиг.2B компонент Uc компенсации умножается на коэффициент G усиления управления в зависимости от скорости изменения угла рулевого управления.
Uc ← GUc …(6)
Более конкретно, G может быть функцией, которая уменьшается, когда величина скорости изменения угла рулевого управления увеличивается, и может быть функцией:

которая изменяется, как иллюстрировано на фиг.5A, например. В уравнении (7a) dδo/dt является контрольным значением, которое может быть задано по желанию. В этом случае, G устанавливается в 1,0 (G=1,0), когда угол рулевого управления равен 0.
[0036] Также даже когда величина скорости изменения угла рулевого управления становится существенно большой, предпочтительно, что влияние управления амортизацией колебаний может поддерживаться до некоторой степени. Таким образом, как показано на фиг.5A, когда коэффициент G усиления, вычисленный согласно уравнению (7a), становится меньше предварительно определенного порогового значения Gmin, фактически используемый коэффициент G усиления управления может сохраняться в Gmin. Соответственно, коэффициент усиления управления может быть получен посредством следующего уравнения.

[0037] Фиг. 5B иллюстрирует обработку вычисления коэффициента усиления управления, выполняемую в блоке регулирования коэффициента усиления управления, в форме блок-схемы последовательности операций. Обращаясь к фиг.5B, когда G, вычисленный согласно уравнению (7a), больше Gmin (этап S10), значение из уравнения (7a) используется как есть (этап S20). Когда G, вычисленный согласно уравнению (7a) меньше Gmin, Gmin используется в качестве коэффициента усиления управления (этап S30). Поскольку скорость dδth/dt изменения угла рулевого управления, когда коэффициент G усиления управления фиксируется в Gmin, задается посредством следующего уравнения (8), может быть определено на вышеупомянутом этапе S10, следовать ли уравнению (8).
dδth/dt=dδo/dt(1-Gmin) …(8)
[0038] В случае когда регулирование коэффициента усиления управления, как описано выше, применяется, если руление начинается во время движения транспортного средства, влияние управления амортизацией колебаний постепенно уменьшается, когда скорость изменения угла рулевого управления увеличивается, так что водитель менее вероятно или маловероятно должен чувствовать себя странно или некомфортно, поскольку не допускается быстрое изменение влияния. В это же время предоставляется возможность возникновения опускания носовой части кузова транспортного средства, и ухудшение реакции угловой скорости рыскания сдерживается. Также поскольку уменьшение коэффициента усиления управления ограничивается в Gmin, влияние управления амортизацией колебаний устраняется не полностью. Например, когда возмущение от поверхности дороги, которое не имеет отношения к операции руления, принимается, колебание, вызванное возмущением, может быть уменьшено.
[0039] Между тем, когда величина угла рулевого управления изменяется в направлении уменьшения, в транспортном средстве, которое уже находится в процессе поворота, эффект управления амортизацией колебаний может быть уменьшен на основе скорости изменения угла рулевого управления, таким образом, как описано выше. Когда величина угла рулевого управления изменяется в направлении уменьшения, сопротивление качению шины уменьшается; следовательно, тормозная сила уменьшается, и положение кузова транспортного средства меняется в направлении задирания носовой части на большую степень, чем прежде. Соответственно, нагрузка прижимания к земле переднего колеса уменьшается, и возникающая при повороте сила уменьшается, приводя в результате к быстрому уменьшению угловой скорости рыскания. В связи с этим управление амортизацией колебаний функционирует, чтобы отменять изменение в положении кузова транспортного средства в направлении задирания носовой части, в связи с чем, нагрузка прижимания к земле переднего колеса не уменьшается, и возникающая при повороте сила уменьшается с уменьшенной скоростью, в то время как реакция (быстрота в уменьшении) угловой скорости рыскания ухудшается. Соответственно, если влияние управления амортизацией колебаний уменьшается на основе скорости изменения угла рулевого управления, как описано выше, положение кузова транспортного средства изменяется соответственно в направлении задирания носовой части, так что ухудшение реакции угловой скорости рыскания может сдерживаться. А именно, обработка вычисления коэффициента G усиления управления в зависимости от величины скорости изменения угла рулевого управления может выполняться, поскольку она не зависит от направления изменения скорости изменения угла рулевого управления.
[0040] В то время как вышеприведенное описание относится к варианту осуществления изобретения, будет очевидно специалистам в области техники, что вариант осуществления может быть легко модифицирован или изменен во многих моментах, изобретение не ограничивается только вариантом осуществления, иллюстрированным выше, и что изобретение может быть применено к различным типам устройств или систем без отступления от концепции изобретения.
[0041] Например, следует понимать, что практически тот же результат может быть получен, даже если блок C8 регулирования коэффициента усиления управления на фиг.2B, как описано выше, вставляется в любом предоставленном местоположении между выходом блока (C6) оценки крутящего момента колеса в секции обратной связи и входом секции C4 модели движения. В этом случае регулирование амплитуды компонента компенсации применяется к фрагменту ввода управления с обратной связью, но не применяется к компоненту компенсации, соответствующему крутящему моменту (запрошенному крутящему моменту Tw0 колеса), соответствующему запросу приведения в движение водителя. Однако поскольку компонент компенсации для запрошенного крутящего момента Tw0 колеса практически предполагает существенное значение, только когда водитель задействует педаль, он, как правило, практически не имеет влияния на возникновения характера опускания носовой части, который возникает во время операции рулевого управления. Однако блок C8 регулирования коэффициента усиления управления преимущественно располагается в позиции, указанной на фиг.2B, так, чтобы надежно уменьшать влияние управления амортизацией колебаний во время операции рулевого управления.
Изобретение относится к системам повышения безопасности движения. Устройство управления амортизацией колебаний управляет выходной мощностью привода транспортного средства для подавления колебаний раскачки/подпрыгивания, вызванных раскачкой или подпрыгиванием транспортного средства. Устройство содержит блок управления амортизацией колебаний и блок регулирования компонента компенсации. Блок управления амортизацией колебаний управляет вращающим моментом транспортного средства так, чтобы уменьшать амплитуду колебания раскачки/подпрыгивания на основе крутящего момента колеса, прикладываемого к колесам транспортного средства, крутящий момент колеса формируется в местоположении, где колеса соприкасаются с поверхностью дороги. Блок регулирования компонента компенсации уменьшает амплитуду компонента компенсации, который корректирует крутящий момент колеса, вычисленный посредством блока управления амортизацией колебаний, так, чтобы подавлять колебание раскачки/подпрыгивания, когда величина скорости изменения угла рулевого управления транспортного средства увеличивается. Достигается повышение безопасности управления транспортным средством. 2 н. и 2 з.п. ф-лы, 9 ил.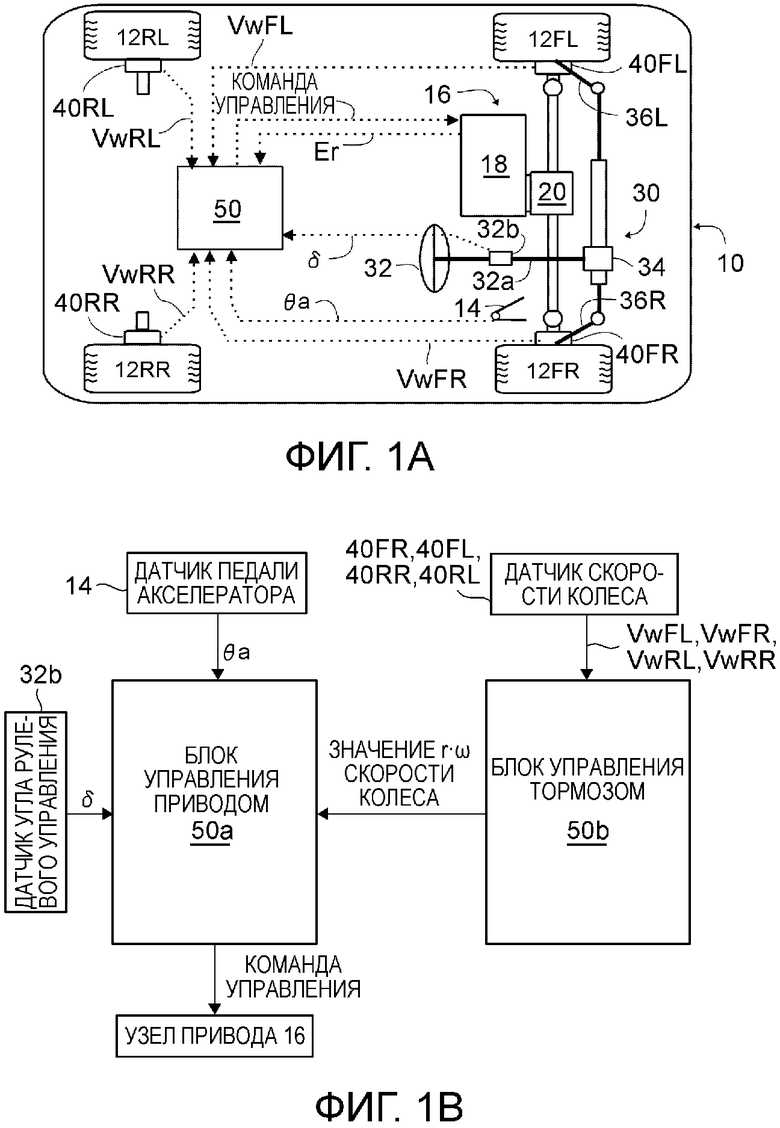
1. Устройство управления амортизацией колебаний, которое управляет выходной мощностью привода транспортного средства с тем, чтобы подавлять колебание раскачки/подпрыгивания, вызванное раскачкой или подпрыгиванием транспортного средства, содержащее:
блок управления амортизацией колебаний, который управляет вращающим моментом транспортного средства так, чтобы уменьшать амплитуду колебания раскачки/подпрыгивания на основе крутящего момента колеса, прикладываемого к колесам транспортного средства, причем крутящий момент колеса формируется в местоположении, где колеса соприкасаются с поверхностью дороги; и
блок регулирования компонента компенсации, который уменьшает амплитуду компонента компенсации, который корректирует крутящий момент колеса, вычисленный посредством блока управления амортизацией колебаний, так, чтобы подавлять колебание раскачки/подпрыгивания, когда величина скорости изменения угла рулевого управления транспортного средства увеличивается.
2. Устройство управления амортизацией колебаний по п.1, при этом блок регулирования компонента компенсации делает степень уменьшения амплитуды компонента компенсации относительно амплитуды колебания раскачки/подпрыгивания постоянной, когда величина скорости изменения угла рулевого управления транспортного средства превышает предварительно определенную скорость.
3. Устройство управления амортизацией колебаний по п.1 или 2, при этом:
коэффициент усиления управления компонента компенсации зависит от величины скорости изменения угла рулевого управления; и
блок регулирования компонента компенсации устанавливает коэффициент усиления управления компонента компенсации так, что коэффициент усиления управления монотонно уменьшается, когда величина скорости изменения угла рулевого управления транспортного средства увеличивается, когда величина скорости изменения угла рулевого управления транспортного средства меньше предварительно определенной скорости.
4. Система управления амортизацией колебаний, содержащая:
узел привода, который формирует движущую силу на колесах транспортного средства;
датчик скорости колеса, который определяет скорость вращения каждого из колес транспортного средства;
датчик угла рулевого управления, который определяет угол поворота рулевого колеса транспортного средства; и
электронный блок управления, который получает первую движущую силу согласно величине нажатия педали акселератора и приводит в действие узел привода со второй движущей силой, которая определяется посредством компонента компенсации, с помощью которого первая движущая сила корректируется так, чтобы подавлять колебание раскачки/подпрыгивания транспортного средства, на основе первой движущей силы и скорости вращения, при этом
электронный блок управления уменьшает амплитуду компонента компенсации, по мере того как величина скорости изменения угла рулевого управления, полученная из угла рулевого управления, увеличивается.
| JP 2014013006 A, 23.01.2014 | |||
| RU 2009108952 A, 27.11.2010 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

