ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к транспортным средствам, в частности, к уменьшению скручивания при статическом рулении.
УРОВЕНЬ ТЕХНИКИ
[0001] Моторные транспортные средства, использующие электромоторы, чтобы рулить транспортными средствами, включающие в себя электромоторы, предоставляющие мощность для помощи людям в рулевом управлении транспортными средствами, должны избегать перегрева электромоторов. Перегретые моторы могут демонстрировать сниженную способность предоставлять крутящий момент. Поддержание колес транспортного средства в положении руления относительно создаваемой шинами нагрузки от момента скручивания может требовать значительной мощности от мотора, что, когда поддерживается, может перегревать мотор.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно одному аспекту изобретения предложен электронный блок управления рулевым актуатором транспортного средства, запрограммированный с возможностью:
поворачивать колесо транспортного средства на первый угол поворота ходового колеса относительно начального положения;
поворачивать колесо транспортного средства на второй угол поворота ходового колеса, вычисленный, чтобы уменьшить скручивание шины при определении, что транспортное средство является неподвижным; и
поворачивать колесо транспортного средства на окончательный угол поворота ходового колеса при определении, что движение транспортного средства является одним из начинающегося и инициированного.
Электронный блок управления рулевым актуатором транспортного средства дополнительно может быть запрограммирован с возможностью сохранять транспортное средство неподвижным, в то время как колесо транспортного средства поворачивается.
Электронный блок управления рулевым актуатором транспортного средства дополнительно может быть запрограммирован с возможностью определять, когда движение должно быть инициировано.
Электронный блок управления рулевым актуатором транспортного средства дополнительно может быть запрограммирован с возможностью вычислять второй угол поворота ходового колеса с помощью данных о положении управляемых колес и данных о токе мотора.
Опционально, второй угол поворота ходового колеса меньше первого угла поворота ходового колеса на угол между половиной максимального скручивания и полуторакратным максимальным скручиванием.
Опционально, окончательный угол поворота ходового колеса равен первому углу поворота ходового колеса.
Опционально, окончательный угол поворота ходового колеса равен второму углу поворота ходового колеса, и электронный блок управления рулевым актуатором транспортного средства дополнительно может быть запрограммирован дополнительно программируется с возможностью поворачивать колесо транспортного средства на промежуточный угол поворота ходового колеса, имеющий угол между половиной максимального скручивания и полуторакратным максимальным скручиванием, перед поворотом на второй угол поворота ходового колеса.
Электронный блок управления рулевым актуатором транспортного средства дополнительно может быть запрограммирован с возможностью поворачивать колесо транспортного средства на промежуточный угол поворота ходового колеса, после того как первый угол поворота ходового колеса достигнут, и на второй угол поворота ходового колеса, после того как промежуточный угол поворота ходового колеса достигнут.
Электронный блок управления рулевым актуатором транспортного средства дополнительно может быть запрограммирован с возможностью:
при определении, что первый угол поворота ходового колеса не находится в диапазоне ограничения движения:
устанавливать первый угол поворота ходового колеса, второй угол поворота ходового колеса и окончательный угол поворота ходового колеса, равными друг другу, и
поворачивать колесо транспортного средства за пределы первого угла поворота ходового колеса на промежуточный угол поворота ходового колеса, имеющий угол между половиной максимального скручивания и полуторакратным максимальным скручиванием, перед поворотом на второй угол поворота ходового колеса; и
при определении, что первый угол поворота ходового колеса находится в диапазоне ограничения движения:
устанавливать окончательный угол поворота ходового колеса равным первому углу поворота ходового колеса, и
устанавливать второй угол поворота ходового колеса в меньший угол, чем первый угол поворота ходового колеса на угол между половиной максимального скручивания и полуторакратным максимальным скручиванием.
Электронный блок управления рулевым актуатором транспортного средства дополнительно может быть запрограммирован с возможностью поворачивать колесо транспортного средства на второй угол поворота ходового колеса, после того как первый угол поворота ходового колеса достигнут.
Согласно второму аспекту изобретения предложен способ управления рулевым актуатором транспортного средства, причем способ содержит этапы, на которых:
поворачивают колесо транспортного средства на первый угол поворота ходового колеса относительно начального положения;
поворачивают колесо транспортного средства на второй угол поворота ходового колеса, вычисленный, чтобы уменьшать скручивание шины при определении, что транспортное средство является неподвижным; и
поворачивают колесо транспортного средства на окончательный угол поворота ходового колеса при определении, что движение транспортного средства является одним из начинающегося и инициированного.
Способ дополнительно может содержать этап, на котором сохраняют транспортное средство неподвижным, в то время как колесо транспортного средства поворачивается.
Способ дополнительно может содержать этап, на котором определяют, когда движение должно быть инициировано.
Способ дополнительно может содержать этап, на котором вычисляют второй угол поворота ходового колеса с помощью данных о положении руления и данных о токе мотора.
Опционально, второй угол поворота ходового колеса меньше первого угла поворота ходового колеса на угол между половиной максимального скручивания и полуторакратным максимальным скручиванием.
Опционально, окончательный угол поворота ходового колеса равен первому углу поворота ходового колеса.
Опционально, окончательный угол поворота ходового колеса равен второму углу поворота ходового колеса, и дополнительно содержащий этап, на котором поворачивают колесо транспортного средства на промежуточный угол поворота ходового колеса, имеющий угол между половиной максимального скручивания и полуторакратным максимальным скручиванием, перед поворотом на второй угол поворота ходового колеса.
Способ дополнительно может содержать этапы, на которых:
поворачивают колесо транспортного средства на промежуточный угол поворота ходового колеса, после того как первый угол поворота ходового колеса достигнут; и
поворачивают колесо транспортного средства на второй угол поворота ходового колеса, после того как промежуточный угол поворота ходового колеса достигнут.
Способ дополнительно может содержать этапы, на которых:
при определении, что первый угол поворота ходового колеса не находится в диапазоне ограничения движения:
устанавливают первый угол поворота ходового колеса, второй угол поворота ходового колеса и окончательный угол поворота ходового колеса, равными друг другу, и
поворачивают колесо транспортного средства за пределы первого угла поворота ходового колеса на промежуточный угол поворота ходового колеса, имеющий угол между половиной максимального скручивания и полуторакратным максимальным скручиванием, перед поворотом на второй угол поворота ходового колеса; и
при определении, что первый угол поворота ходового колеса находится в диапазоне ограничения движения:
устанавливают окончательный угол поворота ходового колеса равным первому углу поворота ходового колеса, и
устанавливают второй угол поворота ходового колеса в меньший угол, чем первый угол поворота ходового колеса на угол между половиной максимального скручивания и полуторакратным максимальным скручиванием.
Способ дополнительно может содержать этап, на котором поворачивают колесо транспортного средства на второй угол поворота ходового колеса, после того как первый угол поворота ходового колеса достигнут.
Таким образом, посредством настоящего изобретения достигается результат, заключающийся в уменьшении нагрузки скручивания шины на рулевой актуатор транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
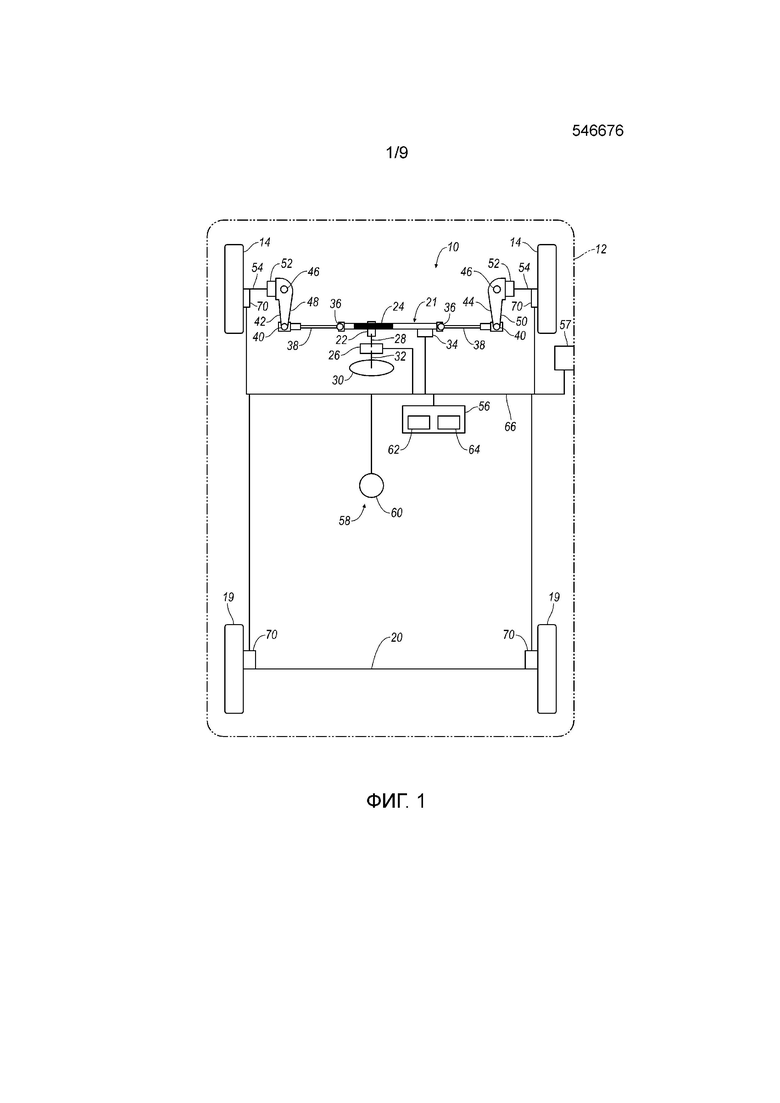
[0002] Фиг. 1 - это схематичный вид транспортного средства, включающего в себя примерную рулевую систему с передними колесами в первой ориентации руления.
[0003] Фиг. 2 - это схематичный вид транспортного средства и рулевой системы на фиг. 1 с передними колесами во второй ориентации руления.
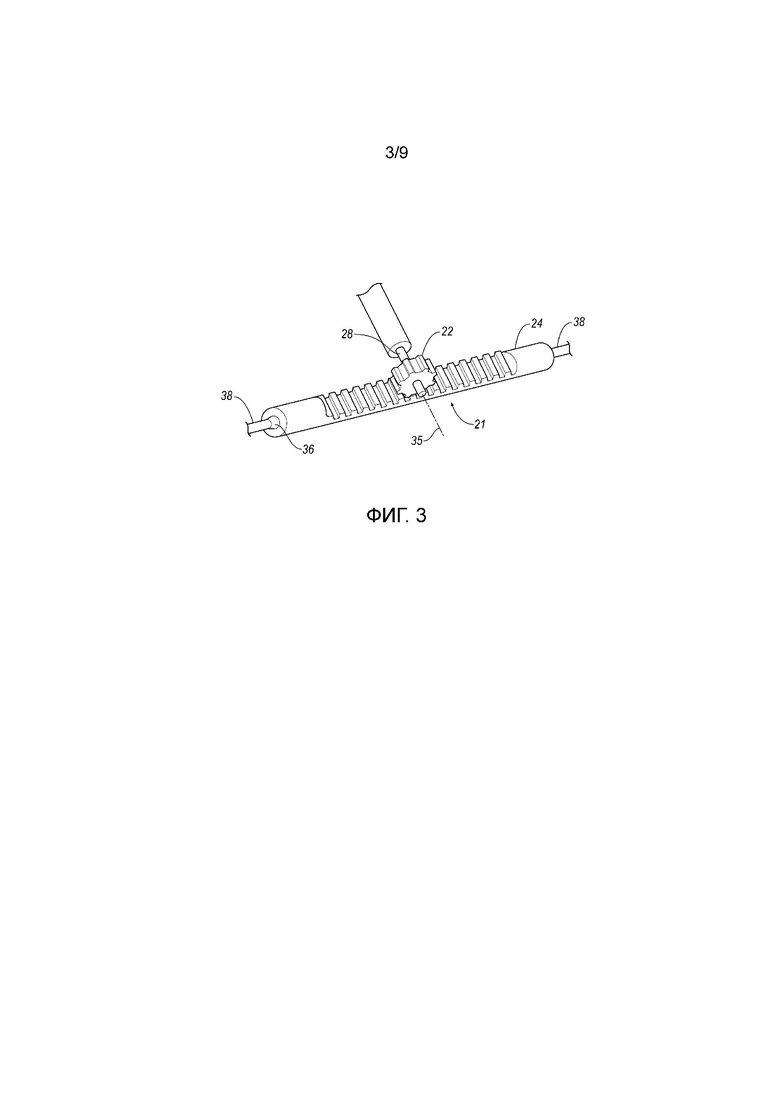
[0004] Фиг. 3 - это вид в перспективе примерной компоновки реечной зубчатой передачи.
[0005] Фиг. 4 - это выделенный вид шины и колеса, установленного в транспортном средстве и ориентированного под углом относительно продольной оси транспортного средства.
[0006] Фиг. 5 - это сечение, взятое в плоскости, проходящей через центр шины и колеса на фиг. 4 в направлении стрелок 5.
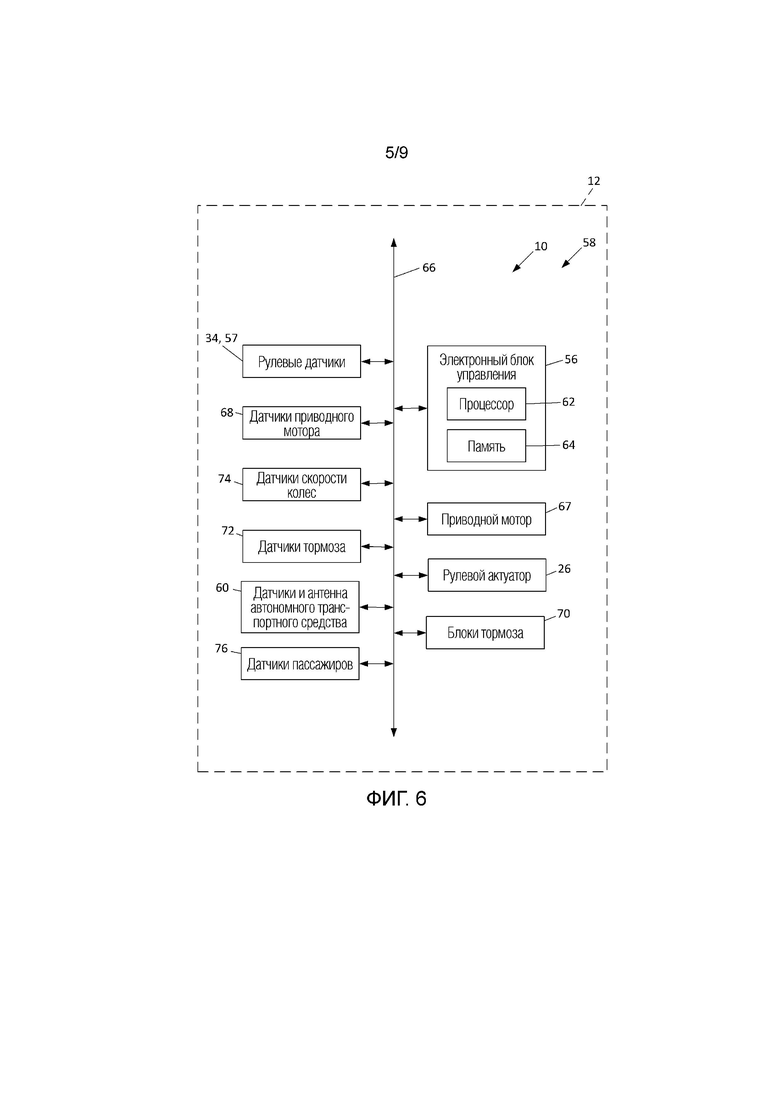
[0007] Фиг. 6 - это иллюстрация в виде блок-схемы примерной системы уменьшения статического скручивания.
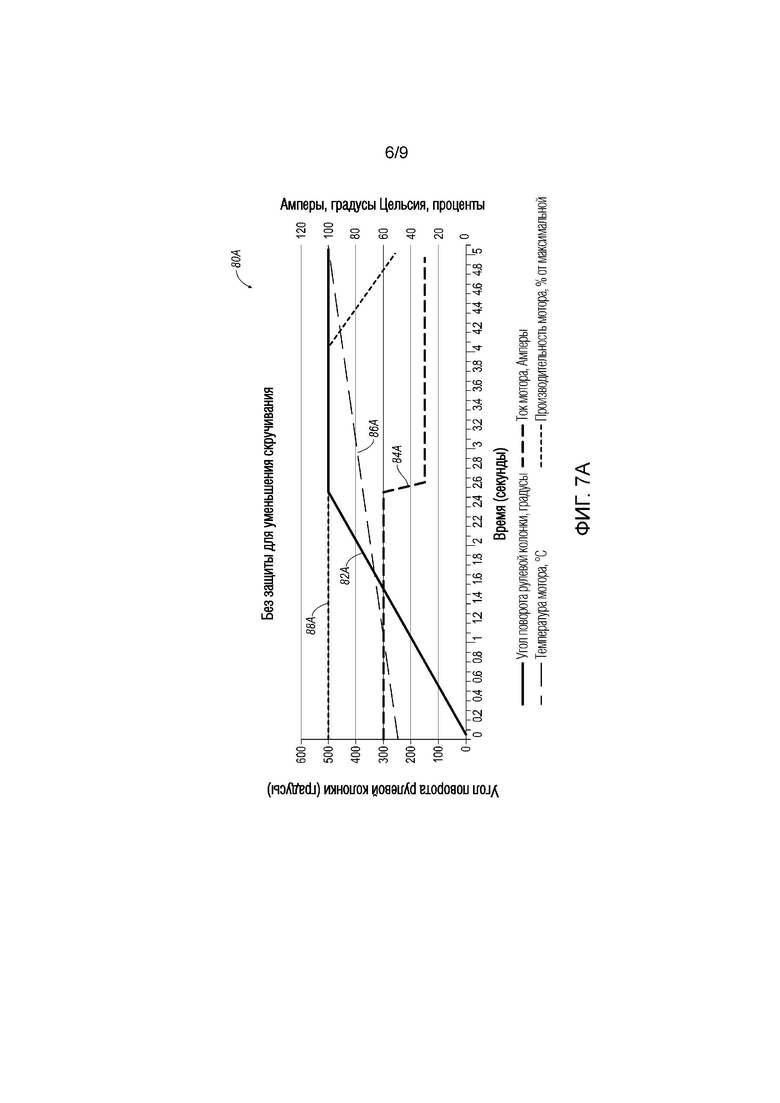
[0008] Фиг. 7A - это примерный график угла поворота управляемых колес, тока мотора, температуры мотора и производительности мотора как функции времени во время события нагрузки при рулении для каждой из систем без примерной системы уменьшения статического скручивания.
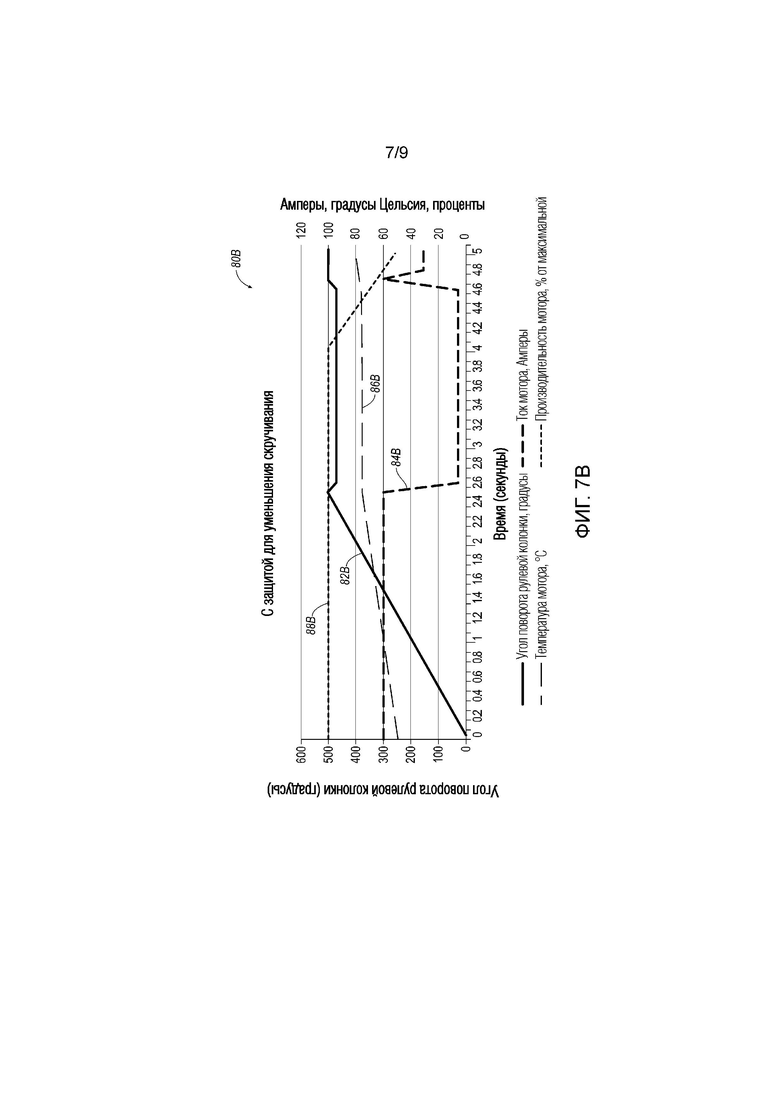
[0009] Фиг. 7B - это примерный график угла поворота управляемых колес, тока мотора, температуры мотора и производительности мотора как функции времени во время события нагрузки при рулении для каждой из систем с примерной системой уменьшения статического скручивания.
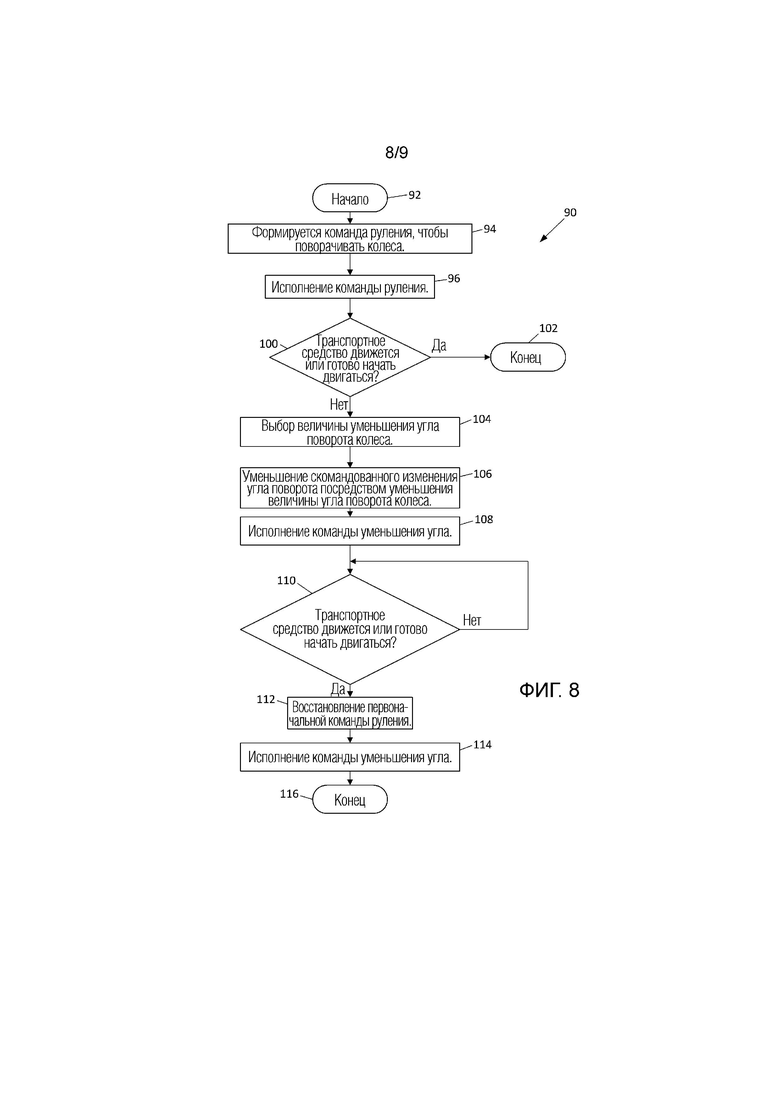
[0010] Фиг. 8 - это примерная блок-схема последовательности операций процесса, выполняемого примерной системой уменьшения статического скручивания.
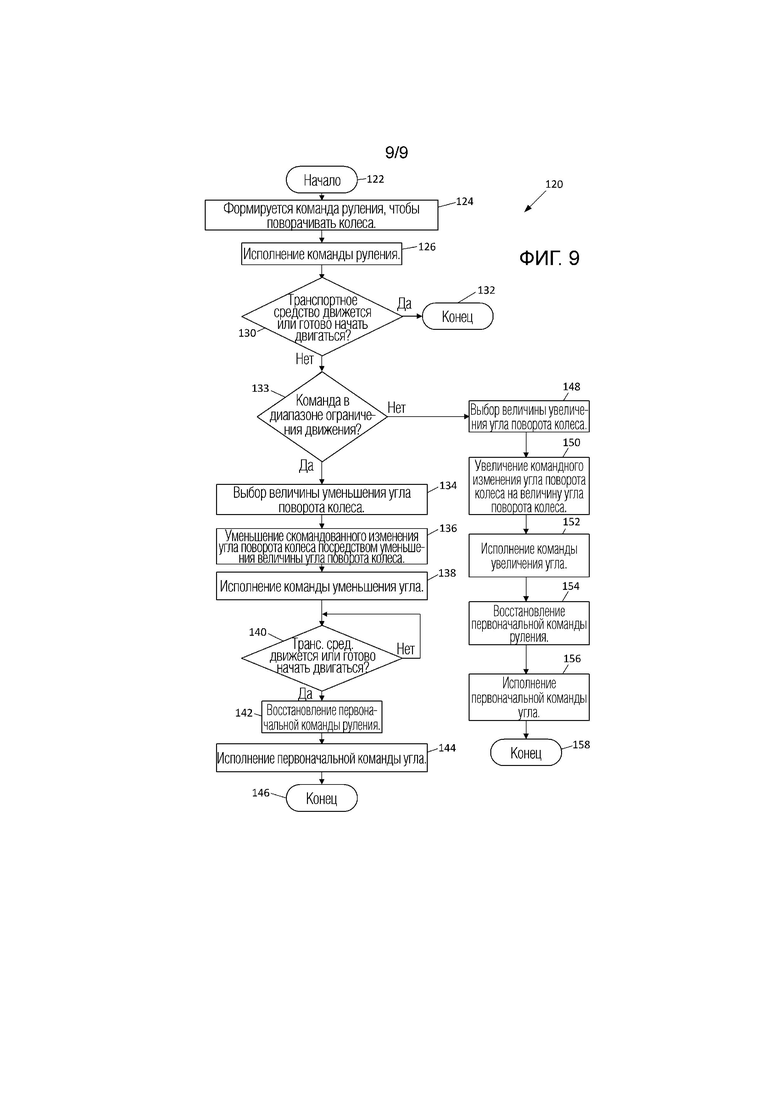
[0011] Фиг. 9 - это примерная блок-схема последовательности операций процесса, альтернативного процессу на фиг. 8, который выполняется посредством примерной системы уменьшения статического скручивания.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Введение
[0012] Транспортное средство включает в себя рулевую систему. Рулевая система поворачивает колесо транспортного средства на первый угол поворота ходового колеса относительно начального положения. Рулевая система поворачивает колесо транспортного средства на второй угол поворота ходового колеса, вычисленный, чтобы уменьшать скручивание шины при определении, что транспортное средство является неподвижным. Рулевая система поворачивает колесо транспортного средства на окончательный угол поворота ходового колеса при определении, что движение транспортного средства либо начинается, либо инициировано.
[0013] Относительные ориентации и направления (в качестве примера, верхнее, нижнее, низ, переднее, заднее, перед, зад, обратное, снаружи, внутри, внутрь, наружу, поперечное, левое, правое) излагаются в этом описании не как ограничения, а для удобства читателя в изображении, по меньшей мере, одного варианта осуществления описываемых структур. Такие примерные ориентации представлены с точки зрения пассажира, сидящего на водительском месте, обращенного к приборной панели. На чертежах аналогичные номера указывают аналогичные части на всем протяжении нескольких видов.
Примерные элементы системы
[0014] Со ссылкой на фиг. 1-6, примерная рулевая система 10, предоставляющая возможность уменьшения статического скручивания при рулении, располагается в примерном транспортном средстве 12. Передние колеса 14, каждое колесо 14 имеет шину 15, как лучше видно на фиг. 4 и 5, установленную на нем, соединяются с рулевой системой 10. Колеса 14 могут быть расположены под углом α поворота ходового колеса посредством рулевой системы 10. Шина 15 определяет пятно 16 шины кругового протектора 17 шины, соответствующее форме земли на пятне 16 шины. Боковые стенки 18 шины 15 соединяют пятно 16 шины с колесом 14. Пятно 16 шины скручивающимся образом сопротивляется изменению угла α поворота ходового колеса, когда шина 15 не катится. Такое сопротивление приводит в результате к скручиванию шины 15, т.е., деформации кручения шины 15 между колесом 14 и пятном 16 шины относительно оси, практически центрированной на пятне 16 и перпендикулярной земле.
[0015] Пятно 16 шины является временным фрагментом протектора 17 шины для катящейся шины 15, т.е., фрагментом протектора 17 в соприкосновении с землей в конкретный момент времени. Пятно 16 шины перемещается по протектору 17, когда шина 15 вращается, т.е., фрагмент протектора 17, содержащий пятно 16, непрерывно изменяется, поскольку часть протектора 17, сцепляющаяся с землей, изменяется.
[0016] Пятно 16 шины, аналогично колесу 14, имеет угловую ориентацию относительно продольной оси транспортного средства, как лучше видно на фиг. 5. Угловая ориентация пятна 16 шины может отличаться от угла α поворота ходового колеса на угол β скручивания. Такое различие может обнаруживаться, когда колеса 14 поворачиваются посредством рулевой передачи 21, в то время как транспортное средство 12 является неподвижным, и пятно 16 шины сопротивляется такому перемещению. Фиг. 5 преувеличивает различие для простоты иллюстрации. Примерная максимальная величина угла β скручивания, т.е., максимальное скручивание, между пятном шины и колесом 14 может быть равно трем градусам.
[0017] Максимальное скручивание и ассоциированный момент противодействия могут быть ограничены скольжением шины на границе между пятном 16 шины и поверхностью земли. Крутящий момент, при котором возникает такое скольжение, т.е., предел крутящего момента, зависит от множества факторов, включающих в себя вес или силу, прикладываемую к шине 15 транспортным средством 12, коэффициент трения между пятном 16 шины и поверхностью земли, размер в единицах площади пятна 16 шины и форму, т.е., длину и ширину пятна шины. Обычно используемый статический коэффициент трения между шинами и сухим бетоном равен 1,0. Когда шины 15 находятся на поверхности с низким коэффициентом трения, таким как влажный лед, сопротивление будет очень низким, например, 0,10.
[0018] В пределах ограничения крутящего момента величина сопротивления может изменяться с комбинацией угла β и сопротивления шины 15 скручиванию. Боковые стенки 18 могут упруго отклоняться относительно каждого из пятна 16 шины и колеса 14, предоставляя возможность перемещения между ними. Жесткость на скручивание шины 15 может зависеть от структуры шины 15, например, высоты и толщины боковых стенок 18 шины 15 и ширины шины 15. Ширина протектора 17 шины влияет на плечо скручивающего момента сопротивляющегося отклонения шины.
[0019] Скручивание ослабляется, когда шинам 15 предоставляется возможность катиться. Качение предоставляет возможность сброса пятна 16 шины, поскольку другая часть протектора 17 определяет и повторно устанавливает пятно 16 шины.
[0020] Рулевая система 10 может быть соединена частично непосредственно со структурой транспортного средства 12, такой как кузов транспортного средства 12 или рама или подрамник транспортного средства 12, все из которых хорошо известны. Рулевая система 10 может также быть соединена частично с передней подвеской транспортного средства 12, которая обычно включает в себя нижний рычаг независимой подвески (не показан).
[0021] Транспортное средство 12 также включает в себя задние колеса 19, каждое также типично включает в себя шину, которые могут быть присоединены к задней оси 20. Задняя ось 20 может быть соединена с задним фрагментом структуры транспортного средства 12, таким как задний фрагмент кузова транспортного средства 12 или рамы или подрамника транспортного средства 12, посредством задней подвески (не показана). В альтернативных конфигурациях, например, с независимой задней подвеской, задняя ось может быть не включена в конструкцию, и задние колеса 19 могут быть установлены на поворотные кулаки задней подвески через подшипники колес. Задняя подвеска и крепление колес не являются критичными для описываемой в настоящий момент системы рулевого управления.
[0022] Реечная зубчатая передача 21 иллюстрируется как часть примерной рулевой системы 10. Примерная рулевая передача 21 включает в себя ведущую шестерню 22 и зубчатую рейку 24, как лучше всего показано на фиг. 3. Альтернативно, соединительная тяга может быть применена в сочетании с механизмом циркулирующего шарика. Кроме того, альтернативно, дискретные и отдельные рулевые актуаторы могут быть размещены на каждом из передних колес, чтобы предоставлять возможность руления без вмешательства рулевой тяги. Будет понятно, что может быть использована любая из вышеупомянутых альтернатив; в целях лучшего понимания идей в этом описании описывается компоновка реечной зубчатой передачи.
[0023] Рулевой актуатор 26 соединяется с возможностью передачи приводного усилия с ведущей шестерней 22 посредством нижней рулевой колонки 28. Пример рулевого актуатора 26 включает в себя электромотор, чтобы предоставлять усилие руления. В контексте данного документа термин "усилие руления" является описанием усилия, используемого, чтобы смещать в осевом направлении часть рулевой тяги. Известен перевод усилия руления в момент руления и момента руления в усилие руления через механизмы, включающие в себя наборы реечной передачи, и через компоновки плеча рычага. Ссылки либо на моменты руления, либо усилия руления не подразумевают исключение других.
[0024] Рулевое колесо 30 может быть соединено с нижней рулевой колонкой 28 через верхнюю рулевую колонку 32 и рулевой актуатор 26. Рулевое колесо 30 и верхняя рулевая колонка 32 могут быть исключены в полностью автономном транспортном средстве. Первичный преобразователь или датчик 34 перемещения рейки может быть соединен частично с рейкой 24 для измерения поперечного перемещения рейки 24. Датчик 34 перемещения рейки может быть в форме датчика поворота, ассоциированного с ведущей шестерней 22, поскольку перемещение рейки 24 будет изменяться линейно с вращением ведущей шестерни 22 вокруг оси 35. Число зубцов на ведущей шестерне 22 вместе с шагом зубцов определяет функциональное соотношение между угловым смещением ведущей шестерни 22, сцепленной с возможностью передачи приводного усилия с рулевой рейкой 24, и смещением рейки 24. Датчик 34 может быть использован, чтобы определять как перемещение рейки 24, так и скорость перемещения рейки 24.
[0025] Внутренние шаровые соединения 36 рулевой тяги на противоположных концах рейки 24 могут соединять с возможностью поворота рулевые поперечные тяги 38 с рейкой 24. Внешние шаровые соединения 40 рулевой тяги могут соединять с возможностью поворота рулевые поперечные тяги 38 с левым поворотным кулаком 42 на левой стороне рулевой системы 10 и с правым поворотным кулаком 44 на правой стороне рулевой системы 10. Поворотные кулаки 42 и 44 могут, каждый, быть соответственно соединены с возможностью поворота посредством шарового соединения 46 подвески с левым нижним рычагом независимой подвески (не показан) и правым нижним рычагом независимой подвески (не показан). Рулевые тяги составляют часть передней подвески и соединяются со структурой транспортного средства. Левый поворотный кулак 42 может иметь левый рычаг 48 рулевого управления, протягивающийся между внешним шаровым соединением 40 рулевой тяги с левой стороны и шаровой опорой 46 подвески. Правый поворотный кулак 44 может иметь правый рычаг 50 рулевого управления, протягивающийся между внешним шаровым соединением 40 рулевой тяги с правой стороны и шаровой опорой 46 подвески. Подшипник 52 колеса устанавливается на каждый из поворотных кулаков 42 и 44. Цапфа 54 поддерживается с возможностью вращения посредством каждого подшипника 52, предоставляющего возможность вращения цапфы 54 относительно поворотных кулаков 42 и 44. Цапфы 54, каждая, прикрепляются с возможностью вращения к одному из передних колес 14.
[0026] Вращение нижней рулевой колонки 28 поворачивает кулаки 42, 44 и колеса 14. Вращение нижней рулевой колонки 28, через зацепление ведущей шестерни 22 и рейки 24, поперечно смещает рейку 24. Поперечное перемещение рейки 24 перемещает поперечные рулевые тяги 38, которые поворачивают рычаги 48 и 50 рулевого управления поворотных кулаков 42 и 44 относительно шаровых соединений 46. Поворотные кулаки 42, 44 могут дополнительно поддерживаться с возможностью вращения посредством верхних шаровых соединений, установленных на верхние рычаги независимой подвески (не показаны) или на амортизационную стойку в сборе (не показана) известным образом. Колеса 14 поворачиваются относительно шаровых соединений 46 в ответ на перемещение рычагов 48, 50 рулевого управления поворотных кулаков.
[0027] Фиг. 1 иллюстрирует колеса 14 и рулевую систему 10 в первой ориентации с колесами 14 в ориентации прямо вперед для движения транспортного средства 12 по прямой линии. Фиг. 2 иллюстрирует колеса 14 и рулевую систему 10 во второй ориентации с колесами 14 в ориентации левого поворота для движения транспортного средства 12 по направленной влево дуге. Внутреннее или левое колесо 14 иллюстрируется как располагающееся под углом α к направленному прямо вперед положению на фиг. 1. Левое или внутреннее колесо 14 на фиг. 1 имеет угол α поворота, равный 0°. Угол правого колеса 14 на фиг. 2 может быть меньше угла левого колеса для левого поворота, поскольку внешняя шина будет следовать слегка большему радиусу, чем внутренняя шина, чтобы избегать трения шины. Такое изменение в угле поворота ходового колеса известно в области техники и может быть обеспечено посредством рычажного механизма Аккермана, который является известным.
[0028] Система 10 также включает в себя вычислительное устройство (электронный блок управления рулевым актуатором транспортного средства), например, электронный блок 56 управления ("ECU"). Транспортное средство 12 может быть автономным транспортным средством (как этот термин определяется ниже), имеющим систему 58 пилота. Система 58 пилота может включать в себя множество датчиков и множество актуаторов, соединенных с ECU 56.
[0029] Датчики системы 18 пилота могут включать в себя множество датчиков отслеживания обстановки транспортного средства или датчиков автономного транспортного средства ("AV-датчиков") 60. AV-датчики 60 могут включать в себя датчики, установленные внутри пассажирского салона транспортного средства, и могут дополнительно быть установлены снаружи транспортного средства на крыше транспортного средства или в приборной панели транспортного средства 12. Предпочтительное местоположение может зависеть от типа датчика. Идентификация нескольких примерных типов датчиков, которые могут быть использованы, предоставляется ниже.
[0030] ECU 56 может состоять из единого вычислительного устройства или компьютера, как показывается посредством фиг. 1, 2 и 4, или может альтернативно сдержать множество компьютеров (например, множество ECU), включающих в себя, например, компьютер силовой цепи, который в свою очередь потенциально содержит компьютер двигателя и компьютер коробки передач, компьютер информационно-развлекательной системы, компьютер системы шасси, компьютер системы устройств пассивной безопасности, компьютер безопасности транспортного средства и т.п. ECU 56 (или каждый компьютер, содержащий ECU 56) включает в себя электронный процессор 62 и ассоциированную память 64.
[0031] Система 58 может дополнительно включать в себя сеть 66 транспортного средства, включающую в себя одну или более проводных и/или беспроводных сред передачи данных, таких как примерная системная шина локальной сети контроллеров ("CAN") или локальная соединительная сеть ("LIN") или другой интерфейс связи. Сеть 66, как иллюстрировано на фиг. 4, предоставляет среду передачи данных, и соединение, между элементами рулевой системы 10 и системы 58 пилота, включающей в себя ECU 56, и компонентами и вспомогательными системами, включающими в себя, в качестве примера, приводной электромотор 67, датчики 68 приводного электромотора, множество тормозных блоков 70, датчики 72 тормоза, датчики 74 скорости колес, ассоциированные с колесами 14, 19, рулевой актуатор 26, рулевые датчики, например, датчик 34 смещения рейки и датчик 57 бокового ускорения, датчики 76 пассажиров, сигналы поворота (не показаны) и/или датчики 60 отслеживания окружающей обстановки транспортного средства.
[0032] Каждое из колес 14, 19 может быть ассоциировано с одним из тормозных блоков 70. Датчики 74 скорости колес могут быть включены в тормозные блоки 70. Рулевой актуатор 26 и ассоциированные рулевые датчики 34, 57 включены в рулевую систему 10. Приводной мотор 67 может, в качестве примера, быть двигателем внутреннего сгорания, предоставляющим всю движущую энергию, или может быть в комбинации с электромотором, т.е., так называемой гибридной силовой цепью, или может быть электромотором, предоставляющим всю движущую энергию, или может быть множеством электромоторов, совокупно предоставляющих всю движущую энергию. Приводной мотор 67 может или не может включать в себя или быть соединен с трансмиссией, предоставляющей крутящий момент и передаточные отношения. Приводной мотор 67 может быть единым блоком рядом с передней частью транспортного средства 12, или приводной мотор 67 может альтернативно быть расположен где-либо еще в транспортном средстве 12.
[0033] Каждый из приводного мотора 67, тормозных блоков 70 и рулевого актуатора 26 иллюстрируется как соединенный непосредственно с ECU 56 через сеть 66, но может альтернативно или дополнительно быть соединен непосредственно с ECU 56. Каждый из приводного мотора 67, тормозных блоков 70 и рулевого актуатора 26 может включать в себя соответствующий электронный контроллер, который принимает инструкции от ECU 56.
[0034] Память 64 ECU 56 включает в себя одну или более форм компьютерно-читаемых носителей и хранит инструкции, исполняемые процессором 62 для выполнения различных операций, включающих в себя такие операции, которые описываются в данном документе. Процессор 62 может считывать и выполнять такие инструкции. ECU 56 включает в себя программирование, чтобы автономно управлять автономным транспортным средством 12 в полностью автономном режиме.
[0035] В целях этого описания выражение "автономное транспортное средство" используется, чтобы ссылаться на транспортное средство, работающее в полностью автономном режиме. Полностью автономный режим определяется как режим, в котором каждая из системы движения транспортного средства 12 (типично через силовую цепь, включающую в себя приводной мотор 67, как определено в данном документе), тормозной системы и рулевой системы управляются посредством ECU 56 практически при всех обстоятельствах. В полуавтономном режиме одна или две из них управляются посредством ECU 56, а в неавтономном режиме ни одна из них.
[0036] Память 64 ECU 56 также хранит данные. Данные могут включать в себя собранные данные, которые собираются от множества устройств. В целом, собранные данные могут включать в себя любые данные из картографической базы данных и любые данные, которые могут быть собраны посредством какого-либо устройства сбора данных, включающего в себя датчики 68 приводного мотора, датчики 74 скорости колеса, рулевые датчики 34, 57, датчики 76 пассажиров, AV-датчики 60 и/или данные, вычисленные из таких данных. Примерные AV-датчики 60 могут включать в себя датчики контекста и положения транспортного средства и датчики местоположения, такие как радиолокационный датчик, лидар-датчик, датчик изображения (например, камера), датчик системы глобального позиционирования ("GPS"), антенны и т.п. Радиолокационные датчики могут быть использованы как для определения местоположения других объектов, так и, например, посредством использования эффекта Доплера, определения относительной скорости таких других объектов. Вышеупомянутые примеры не предназначены быть ограничивающими. Другие типы устройств сбора данных могут быть использованы, чтобы предоставлять данные в ECU 56. Данные могут также включать в себя вычисленные данные, вычисленные в ECU 56 из собранных данных и из других вычисленных данных.
[0037] Фиг. 7A является примерным графиком 80A, иллюстрирующим потребление тока мотора и действие на потенциальные возможности мотора рулевой системы 10, не включающей в себя процесс, описанный ниже. Фиг. 7B является примерным графиком 80B, иллюстрирующим потребление тока мотора и действие на потенциальные возможности мотора рулевой системы 10, включающей в себя процесс, описанный ниже.
[0038] На графике 80A примерные графики угла 82A поворота рулевой колонки, тока 84A мотора, температуры 86A мотора и производительности 88A мотора иллюстрируются для системы 10, которая не использует защиту для уменьшения скручивания. График 82A представляет угловое положение верхней рулевой колонки 32 и нижней рулевой колонки 28. Каждая из колонок 28 и 32 вращаются друг с другом. Угловое положение увеличивается линейно от нуля до 500 градусов за время 2,5 секунды и удерживается в этом положении в течение других 2,5 секунд. Угол α поворота ходового колеса для колес 14 изменяется практически линейно с углом поворота нижней рулевой колонки 28. Точное соотношение между углом поворота нижней рулевой колонки 28 и углом α поворота ходового колеса для колес определяется посредством рулевой передачи 21. Примерное соотношение может предоставлять изменение в угле α поворота ходового колеса 30 градусов с изменением в угле поворота рулевого колеса 500 градусов.
[0039] Угол пятна 16 шины будет отставать от угла поворота колеса 14 в статичной ситуации руления на угол β, согласно вышеприведенному обсуждению структуры шины 15. Примерная шина 15, расположенная на поверхности с высоким коэффициентом трения, такой как бетон, может иметь примерный максимальный угол β, на основе ограничения скольжения для шины, транспортного средства и поверхности земли, равный трем градусам. Скручивание в шине 15 требует, чтобы актуатор 26 поддерживал нагрузку относительно скручивающей силы шины 15, чтобы поддерживать колесо 14 под целевым углом α поворота относительно момента скручивания, ассоциированного с углом β поворота. Удержание этого положения, как иллюстрировано на фиг. 80A, имеет результаты, нанесенные на графике 80A и описанные ниже. После достижения 500 градусов поворота рулевого колеса 30 или нижней рулевой колонки положение рулевого колеса 30 и рулевой колонки сохраняется в течение других 2,5 секунд. Колесо 14 соответственно удерживается под примерным углом α поворота ходового колеса, равным 30 градусам. Однако, пятно 16 шины находится под примерным углом 27 градусов. Разница в три градуса в угловом положении колеса 14 относительно пятна 16 шины поддерживается относительно упругой скручивающей силы шины 15 посредством электромотора актуатора 26. ECU 56 может оценивать характерное для ситуации значение угла β скручивания и максимальное скручивание с помощью доступных данных, включающих в себя значения тока, потребляемого мотором актуатора, который может быть измерен посредством амперметра (не показан), ассоциированного с электромотором рулевого актуатора 26, перемещения рулевой рейки, которое измеряется посредством датчика 34, и данных о жесткости шины. Данные о жесткости шины могут быть предоставлены производителем шины и сохранены в памяти 64 ECU 56. Альтернативно, одно типовое значение для максимального скручивания может быть применено в лабораторном испытании, сохранено в памяти 64 и использовано посредством ECU 56 для всех обстоятельств.
[0040] Примерный электромотор актуатора 26 может потреблять 60 ампер, когда колеса 14 поворачиваются с нуля градусов до примерных 30 градусов. Когда рулевая колонка 28 достигает своей примерной цели в 500 градусов, и колесо 14 находится под углом 30 градусов, потребность в моторе актуатора 26 уменьшается, поскольку актуатор больше не требуется, чтобы вращательным образом тереть шину о дорожное покрытие, чтобы приводить шину в целевое положение. В то время как потребность в моторе уменьшается, она не устраняется. Все еще существует необходимость поддерживать колесо 14 под углом 30 градусов относительно момента скручивания шины 15, что требует примерно 30 ампер для мотора. В соответствии с этим, график 84A показывает ток, первоначально установившийся на 60 амперах и падающий и удерживающийся на 30 амперах, когда угол поворота рулевой колонки достигает 500 градусов.
[0041] Энергия, потребляемая мотором актуатора 26, когда актуатор 26 остановлен, в сравнении с нагрузкой скручивания, создает тепло, увеличивающее температуру мотора актуатора. График 86A иллюстрирует увеличение в температуре мотора в течение пяти секунд руления, иллюстрированное посредством графика 80A. Даже если ток, потребляемый мотором актуатора, падает наполовину до 30 ампер после 2,5 секунд, температура мотора продолжает увеличиваться практически линейным образом с той же быстротой, что при потреблении мотором 60 ампер. Когда примерный мотор достигает конкретной температуры, например, 90 градусов по Цельсию, производительность мотора начинает ухудшаться, как иллюстрировано посредством графика 88A. В иллюстрированном примере ухудшение в производительности происходит быстро, снижая рабочую характеристику со 100%, когда температура достигает 90 градусов, до 50% при 100 градусах по Цельсию. Иллюстрированное ухудшение производительности происходит приблизительно за одну секунду времени.
[0042] На графике 80B примерные графики угла 82B поворота рулевой колонки, тока 84B мотора, температуры 86B мотора и производительности 88B мотора иллюстрируются для системы 10, которая не использует защиту для уменьшения скручивания. График 82B углового положения колонок 32 и 28 показывает угловое положение, увеличивающееся линейно от нуля до 500 градусов в первые 2,5 секунды графика 80B.
[0043] Угол пятна 16 шины будет отставать от угла поворота колеса в ситуации статичного руления на угол β скручивания, согласно вышеприведенному обсуждению структуры шины. Система графика 80B отличается от системы графика 80A в том, что система графика 80B уменьшает целевой угол поворота рулевого колеса с 500 градусов до 470 градусов, т.е., на шесть процентов в этом примере. Примерное шестипроцентное изменение в угле поворота рулевого колеса приводит в результате к соответствующему изменению в угле поворота колеса (округляя до ближайшего целого числа) с 30 градусов до 28 градусов. С этим изменением пятно 16 шины может оставаться неподвижным, но угол β скручивания уменьшается до одного градуса, практически уменьшая, например, уменьшая на 92%, нагрузку на мотор актуатора, необходимую, чтобы поддерживать колесо 14 на месте относительно нагрузки скручивания шины 15. Удержание этого положения, как иллюстрировано на графике 80B, имеет результаты, нанесенные на графике 80B и описанные ниже. Когда сигнализируется, актуатор 26 восстанавливает угол поворота рулевого колеса до 500 градусов, а угол α поворота ходового колеса до 30 градусов.
[0044] Примерный электромотор актуатора 26 может потреблять 60 ампер, когда колеса 14 поворачиваются с нуля градусов до примерных 30 градусов. Когда целевой угол поворота рулевого колеса задается в 470 градусов, уменьшенная потребность в моторе актуатора 26 предоставляет возможность уменьшения тока до 5 ампер, чтобы поддерживать колесо под углом 28 градусов относительно значительно уменьшенного момента скручивания шины 15. График 84B показывает ток, изначально установившийся на 60 амперах и падающий и удерживающийся на 5 амперах, когда угол поворота рулевой колонки достигает 470 градусов. Падение отражает комбинацию завершения движения актуатора 26 и снятия большей части скручивания шины. В настоящем примере необходимо только 5 ампер тока, чтобы преодолевать остаточное скручивание.
[0045] График 86B иллюстрирует изменение в температуре мотора в течение пяти секунд руления, иллюстрированной посредством графика 80B. С уменьшением угла α поворота ходового колеса до 28 градусов, ток, потребляемый мотором актуатора, падает до 5 ампер после 2,5 секунд, температура мотора практически застывает на 75 градусах по Цельсию и остается здесь до тех пор, пока угол поворота рулевого колеса не будет сброшен в 500 градусов, и мотор начнет потреблять 30 ампер тока. Поскольку вращение шины, как ожидается, должно начаться после завершения пяти секунд, мотор никогда не достигнет метки 90 градусов по Цельсию. Не допуская отметки 90 градусов по Цельсию, производительность мотора никогда не начнет ухудшаться, оставаясь на 100%, как иллюстрировано посредством графика 88B.
[0046] ECU 56 может быть запрограммирован, чтобы уменьшать возникновение скручивания шины, как описано выше. Два примера способа или процесса 90, 120 для того, чтобы транспортное средство 12 идентифицировало и уменьшало скручивание шины, описываются ниже.
Обработка
[0047] Фиг. 8 иллюстрирует примерный процесс 90 ослабления скручивания шины, который может быть сохранен в ECU 56 транспортного средства 12. ECU 56 выполняет этапы, иллюстрированные на фиг. 8, как описано ниже, т.е., утверждения ниже, что блок, исполняющий некоторые этапы, означают, что ECU 56 хранит программу для исполнения процесса 90, 120, включающего в себя раскрытый этап, и может, фактически, выполнять этап как часть выполнения процесса 90, 120. Компьютерная программа для выполнения процесса 90 может быть реализована на этапе 92 начала, например, когда выдается команда запуска, которая может быть ассоциирована с запуском транспортного средства в ответ на приближение или касание пассажиром транспортного средства.
[0048] Далее, этап 94 процесса распознает команду руления, чтобы поворачивать колеса 14, т.е., изменять угол α поворота ходовых колес для колес 14 из начального положения на первый угол поворота ходовых колес. Следом за таким распознаванием процесс 90 переходит к этапу 96 процесса. Этап 96 процесса подает питание к мотору актуатора 26, вынуждая колеса 14 поворачиваться в соответствии с командой руления. Такая подача питания может включать в себя соединение мотора актуатора 26 с источником электроэнергии, чтобы предоставлять ток мотору. Как часть этапа 96 процесса, ECU 56 может подтверждать выполнение команды руления. Такое подтверждение может быть выполнено с помощью датчика 34, чтобы подтверждать, что колеса 14 находятся в целевой ориентации.
[0049] Процесс 90 переходит от этапа 96 процесса к этапу 100 решения. Этап 100 решения определяет, движется ли транспортное средство 12. Могут быть использованы данные от датчиков 74 скорости колес, чтобы определять, движется ли транспортное средство 12.
[0050] При определении, что транспортное средство 12 движется, процесс 90 переходит к этапу 102 окончания и завершается. При определении, что транспортное средство 12 не движется, т.е., является неподвижным, процесс 90 переходит к этапу 104 процесса, который выбирает величину уменьшения угла поворота колеса. Примерная величина выполнения создается в зависимости от обсужденных выше факторов, таких как предел скольжения.
[0051] Следом за этапом 104 процесса, этап 106 процесса уменьшает скомандованное целевое угловое положение колеса посредством выбранной величины уменьшения угла колеса, чтобы достигать второго угла поворота ходового колеса. Примерная величина уменьшения может составлять два градуса, более половины примерного максимального скручивания, равного трем градусам, когда первоначальная команда является угловым смещением более чем на 30 градусов, и шины располагаются на сухом цементе. Это вызовет сдвиг в команде с 30 градусов до 28 градусов. Этап 108 процесса, после этапа 106 процесса, исполняет команду уменьшенного угла. Уменьшение угла уменьшает скручивание шины и предоставляет возможность снижения тока к мотору актуатора 26, как иллюстрировано посредством графика 84B на фиг. 7B. Эффективное снижение может быть получено посредством выбора в качестве величины уменьшения угла поворота колеса значения в диапазоне между половинным и полуторакратным значением максимального скручивания, особенно когда шина 15 в первом угловом положении находится при максимальном скручивании.
[0052] После этапа 108 процесс 90 переходит к этапу 110 решения, который определяет, начало ли транспортное средство двигаться или готово начать двигаться. Ожидание движения транспортного средства является возможным, когда транспортное средство 12 эксплуатируется в автономном режиме. Например, может быть использована связь между транспортным средством и инфраструктурой, чтобы предоставлять возможность транспортному средству 12 связываться со светофором. Транспортное средство будет, посредством такой связи, возможно ожидать изменения в сигнале с сигнала "стоп" на сигнал "поехали".
[0053] Когда определяется, что транспортное средство 12 не движется и еще не готово начать двигаться, процесс 90 циклически возвращается обратно к этапу 110 решения, чтобы продолжать проверку. Когда определяется посредством этапа 110 решения, что колеса 14 транспортного средства 12 готовы начать катиться или уже катятся, т.е., что движение транспортного средства начинается или уже инициировано, процесс 90 переходит к этапу 112 процесса. Этап 112 процесса восстанавливает первоначальную команду угла руления в качестве окончательного угла поворота ходового колеса. Окончательный угол поворота ходового колеса является углом α поворота ходового колеса, который колесо будет удерживать, когда движение транспортного средства возобновляется. Этап 114 процесса, после этапа 112 процесса, соответствует команде увеличенного угла, в соответствии с графиком 84B на 4,7 секунды. Угол устраняется, при этом колеса 14 возвращаются в первоначальное командное положение. Потребление тока увеличивается, но только на короткое время, когда транспортное средство начинает движение, прежде чем температура мотора значительно повышается. Следом за таким выполнением процесс 90 переходит к этапу 116 окончания и завершается.
[0054] Фиг. 9 иллюстрирует примерный процесс 120 уменьшения скручивания шины, который может, аналогично процессу 90, быть сохранен в ECU 56 транспортного средства 12. Процесс 120 отличается от процесса 90 в том, что, в некоторых случаях, выдается команда сначала увеличивать скомандованный угол поворота управляемых колес за пределы первоначальной цели и затем выдается команда уменьшать угол. Сочетание чрезмерного повышения и уменьшения уменьшает скручивание и оставляет колесо 14 расположенным в желаемом целевом положении. ECU 56 выполняет этапы, иллюстрированные на фиг. 9, как описано ниже. Компьютерная программа для выполнения процесса 120 может быть реализована на этапе 122 начала, например, когда выдается команда запуска, которая может быть ассоциирована с запуском транспортного средства в ответ на приближение или касание пассажиром транспортного средства.
[0055] Далее, этап 124 процесса распознает команду руления, чтобы поворачивать колеса 14, т.е., изменять угол α поворота ходовых колес для колес 14 из начального положения на первый угол поворота ходовых колес. Следом за таким распознаванием процесс 120 переходит к этапу 126 процесса. Этап 126 процесса подает питание к мотору актуатора 26, вынуждая колеса 14 поворачиваться в соответствии с командой руления. Такая подача питания может включать в себя соединение мотора актуатора 26 с источником электроэнергии, чтобы предоставлять ток мотору. Как часть этапа 126 процесса, ECU 56 может подтверждать выполнение команды руления. Такое подтверждение может быть выполнено с помощью датчика 34, чтобы подтверждать, что колеса 14 находятся в целевой ориентации.
[0056] Процесс 120 переходит от этапа 126 процесса к этапу 130 решения. Этап 130 решения определяет, движется ли транспортное средство 12. Данные от датчиков 74 скорости колес могут быть использованы, чтобы определять, движется ли транспортное средство 12.
[0057] При определении, что транспортное средство 12 движется, процесс 120 переходит к этапу 132 окончания и завершается. При определении, что транспортное средство 12 не движется, т.е., является неподвижным, процесс 120 переходит к этапу 133 решения, который определяет, находится ли команда руления для команды этапа 124 процесса в диапазоне ограничения движения. Примерное ограничение движения может быть характеристикой рулевой передачи 21, например, когда ведущая шестерня 22 достигает последнего зубца в рейке 24. Примерный диапазон может равняться ожидаемому изменению в угле α поворота ходовых колес, необходимому, чтобы уменьшать скручивание шины достаточной величины, чтобы предотвращать ухудшение производительности электромотора актуатора 26. Например, если α имеет возможный диапазон между ограничениями движения ±30 градусов, и если изменение в угле, необходимое, чтобы достаточно уменьшать скручивание, равно 2 градусам, команда будет выдаваться в диапазоне ограничения движения, если команда приведет в результате к окончательному положению колес, находящемуся более чем на 28 градусов от продольной оси.
[0058] Когда команда этапа 124 процесса, т.е., целевой угол α ходового колеса находится в диапазоне ограничения движения, процесс 120 переходит к этапу 134 процесса, который выбирает величину уменьшения угла поворота колеса, чтобы достигать второго угла поворота ходового колеса. Примерная величина выполнения создается в зависимости от обсужденных выше факторов, таких как ограничение скольжения.
[0059] Следом за этапом 134 процесса, этап 136 процесса уменьшает скомандованное целевое угловое положение колеса посредством выбранной величины уменьшения угла колеса, чтобы достигать второго угла поворота ходового колеса. Примерная величина уменьшения может составлять два градуса, более половины примерного максимального скручивания, равного трем градусам, когда первоначальная команда является угловым смещением более чем на 30 градусов, и шины располагаются на сухом цементе. Это вызовет сдвиг в команде с 30 градусов до 28 градусов. Этап 138 процесса, после этапа 136 процесса, исполняет команду уменьшения угла. Уменьшение угла уменьшает скручивание шины и предоставляет возможность снижения тока к мотору актуатора 26, как иллюстрировано посредством графика 84B на фиг. 7B. Эффективное снижение может быть получено посредством выбора в качестве величины уменьшения угла поворота колеса значения в диапазоне между половинным и полуторакратным значением максимального скручивания, особенно когда шина 15 в первом угловом положении находится при максимальном скручивании.
[0060] После этапа 138 процесс 120 переходит к этапу 140 решения, который определяет, начало ли транспортное средство двигаться или готово начать двигаться. Как обсуждалось выше, ожидание движения транспортного средства является возможным, когда транспортное средство 12 эксплуатируется в автономном режиме.
[0061] Когда определяется, что транспортное средство 12 не движется и еще не готово начать двигаться, процесс 120 циклически возвращается обратно к этапу 140 решения, чтобы продолжать проверку. Когда определяется посредством этапа 140 решения, что транспортное средство 12 движется или готово начать двигаться, процесс 120 переходит к этапу 142 процесса. Этап 142 процесса восстанавливает первоначальную команду угла руления в качестве окончательного угла поворота ходового колеса. Этап 144 процесса, после этапа 142 процесса, соответствует команде увеличенного угла, в соответствии с графиком 84B на 4,7 секунды. Угол устраняется, при этом колеса 14 возвращаются в первоначальное командное положение. Потребление тока мотором актуатора увеличивается, но только на короткое время, когда транспортное средство начинает движение, прежде чем температура мотора значительно увеличивается. Следом за таким выполнением процесс 120 переходит к этапу 146 окончания и завершается.
[0062] Когда этап 133 решения определяет, что команда не находится в диапазоне ограничения движения, процесс 120 переходит к этапу 148 процесса. Этап 148 процесса выбирает величину увеличения угла поворота колеса. Величина увеличения угла поворота колеса может быть определена тем же образом, что и величина уменьшения угла поворота колеса, как изложено выше, и, как ожидается, должна быть практически равна величине уменьшения угла поворота колеса.
[0063] Процесс 120 затем переходит к этапу 150 процесса. Этап 150 процесса увеличивает скомандованный угол поворота колеса на величину увеличения угла поворота колеса. В примере, в котором первоначальный целевой угол α поворота рулевого колеса или первый угол поворота ходового колеса равен 20 градусам, угол поворота колеса будет скомандован на промежуточный угол поворота ходового колеса, равный 22 градусам. За этапом 150 процесса следует этап 152 процесса, который требует исполнения команды увеличения угла. Мотор актуатора снабжается электропитанием, чтобы располагать колесо 14 под углом 22 градуса.
[0064] Достигнув угла поворота колеса в 22 градуса, процесс 120 переходит к этапу 154 процесса, который восстанавливает первоначальную команду руления. Продолжая с вышеприведенным примером, команда руления будет сброшена в 20 градусов, второй и окончательный угол поворота ходового колеса. Этап 156 процесса, следующий за этапом 154 процесса, исполняет команду, подающую питание к мотору актуатора, чтобы перемещать колесо на угол 20 градусов. Результатом этого первоначального чрезмерного превышения цели и затем сброса в первоначальную цель является желаемое устранение скручивания шины. Система 10, таким образом, способна поддерживать колеса 14 в целевом значении угла α, равном 20 градусам, без перегрева мотора актуатора.
[0065] С колесами, удерживаемыми в целевом значении α угла, процесс 120 может переходить к этапу 158 окончания и завершаться.
Заключение
[0066] Были раскрыты примерная система и способ для разгрузки рулевого актуатора транспортного средства во время маневра статического руления.
[0067] В контексте данного документа наречие "практически" означает, что форма, структура, показатель, количество, время и т.д. могут отклоняться от точно описанной геометрии, расстояния, показателя, количества, времени и т.д. вследствие несовершенств в материалах, механической обработке, производстве, передаче данных, скорости вычислений и т.д.
[0068] Что касается ссылок на множество ECU в настоящем описании, вычислительные устройства, такие как обсуждаемые в данном документе, как правило, каждое, включают в себя инструкции, исполняемые одним или более вычислительными устройствами, такими как идентифицированные выше, и для выполнения блоков или этапов процессов, описанных выше.
[0069] В целом, описанные вычислительные системы и/или устройства могут применять любую из множества компьютерных операционных систем, включающих в себя, но не считающихся ограниченными, версии и/или разновидности операционной системы Ford Sync®, микропрограммного обеспечения AppLink/Smart Device Link, операционной системы Microsoft Automotive®, операционной системы Microsoft Windows®, операционной системы Unix (например, операционной системы Solaris®, распространяемой корпорацией Oracle Corporation из Редвуд Шорс, Калифорния), операционной системы AIX UNIX, распространяемой компанией International Business Machines из Армонка, Нью-Йорк, операционной системы Linux, операционных систем Mac OS X и iOS, распространяемых компанией Apple Inc. из Купертино, Калифорния, BlackBerry OS, распространяемой компанией Blackberry Ltd из Ватерлоо, Канада, и операционной системы Android, разрабатываемой компанией Google Inc. открытым альянсом мобильных телефонов, или платформы QNX® CAR Platform for Infotainment, предлагаемой компанией QNX Software Systems. Примеры вычислительных устройств включают в себя, без ограничения, бортовой компьютер транспортного средства, компьютерную рабочую станцию, сервер, настольный компьютер, ноутбук, портативный или карманный компьютер или некоторую другую вычислительную систему и/или устройство.
[0070] Компьютеры и вычислительные устройства, как правило, включают в себя компьютерно-исполняемые инструкции, при этом инструкции могут исполняться одним или более вычислительными устройствами, такими как перечисленные выше. Машиноисполняемые инструкции могут быть компилированы или интерпретированы из компьютерных программ, созданных с использованием множества языков и/или технологий программирования, включающих в себя, без ограничения, отдельно или в комбинации, Java™, C, C++, Matlab, Simulink, Stateflow,Visual Basic, Java Script, Perl, HTML и т.д. Некоторые из этих вариантов применения могут быть скомпилированы и выполнены на виртуальной машине, такой как виртуальная машина Java, виртуальная машина Dalvik и т.п. В целом, процессор (например, микропроцессор) принимает инструкции, например, из памяти, компьютерно-читаемого носителя и т.д. и выполняет эти инструкции, таким образом, выполняя один или более процессов, включающих в себя один или более процессов, описанных в данном документе. Такие инструкции и другие данные могут быть сохранены и переданы с помощью множества компьютерно-читаемых носителей. Файл в вычислительном устройстве, в целом, является совокупностью данных, сохраненных на считываемом компьютером носителе, таком как носитель хранения, оперативное запоминающее устройство и т.д.
[0071] Память может включать в себя компьютерно-читаемый носитель (также называемый процессорно-читаемым носителем), который включает в себя любой постоянный (например, материальный) носитель, который участвует в предоставлении данных (например, инструкций), которые могут быть считаны компьютером (например, процессором компьютера). Такой носитель может принимать многие формы, включающие в себя, но не только, энергонезависимые носители и энергозависимые носители. Энергонезависимые носители могут включать в себя, например, оптические или магнитные диски и другое постоянное запоминающее устройство. Энергозависимые носители могут включать в себя, например, динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основную память. Такие инструкции могут быть переданы посредством одной или более сред передачи данных, включающих в себя коаксиальные кабели, медный провод и оптические волокна, включающие в себя провода, которые содержат системную шину, соединенную с процессором ECU. Обычные формы компьютерно-читаемых носителей включают в себя, например, гибкий диск, дискету, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфорационную карту, бумажную ленту, любой другой физический носитель с рисунками отверстий, RAM, PROM, EPROM, FLASH-EEPROM, любую другую микросхему памяти или картридж, или любой другой носитель, с которого компьютер может выполнять считывание.
[0072] Базы данных, репозитории данных или другие хранилища данных, описанные в данном документе, могут включать в себя различные виды механизмов для сохранения, осуществления доступа и извлечения различных видов данных, включающих в себя иерархическую базу данных, набор файлов в файловой системе, базу данных приложений в собственном формате, систему управления реляционными базами данных (RDBMS) и т.д. Каждое такое хранилище данных, в общем, включается в вычислительное устройство с использованием компьютерной операционной системы, к примеру, одной из компьютерных операционных систем, упомянутых выше, и является доступным через сеть любым одним или более из множества способов. Файловая система может быть доступна из операционной системы компьютера и может включать в себя файлы, сохраненные в различных форматах. RDBMS, как правило, применяет язык структурированных запросов (SQL) в дополнение к языку для создания, хранения, редактирования и выполнения сохраненных процедур, такой как язык PL/SQL, упомянутый выше.
[0073] В некоторых примерах элементы системы могут быть реализованы как компьютерно-читаемые инструкции (например, программное обеспечение) на одном или более вычислительных устройствах (например, серверах, персональных компьютерах и т.д.), сохраненные на считываемых компьютером носителях, ассоциированных с ним (например, дисках, запоминающих устройствах и т.д.). Компьютерный программный продукт может содержать такие инструкции, сохраненные на машиночитаемых носителях, для выполнения функций, описанных в данном документе.
[0074] Что касается носителей, процессов, систем, способов, эвристических правил и т.д., описанных в данном документе, должно быть понятно, что, хотя этапы таких процессов и т.д. были описаны как происходящие согласно некой упорядоченной последовательности, такие процессы могут быть применены на практике с помощью описанных этапов, выполняемых в порядке, отличном от порядка, описанного в данном документе. Дополнительно должно быть понятно, что некоторые этапы могут выполняться одновременно, что другие этапы могут быть добавлены, или что некоторые этапы, описанные в данном документе, могут быть опущены. Другими словами, описания процессов в данном документе предоставлены с целью иллюстрации некоторых вариантов осуществления и не должны никоим образом истолковываться как ограничивающие формулу изобретения.
[0075] Соответственно, должно быть понятно, что вышеприведенное описание предназначено быть иллюстративным, а не ограничивающим. Многие варианты осуществления и применения, отличные от предоставленных примеров, будут понятны специалистам в области техники по прочтении вышеприведенного описания. Объем изобретения должен быть определен не со ссылкой на вышеприведенное описание, но должен вместо этого быть определен со ссылкой на прилагаемую формулу изобретения вместе с полным объемом эквивалентов, на которые такие пункты формулы имеют право. Ожидается и предполагается, что будущие разработки произойдут в технологиях, рассмотренных в данном документе, и что раскрытые системы и способы будут включены в такие будущие варианты осуществления. Резюмируя, должно быть понятно, что изобретение можно модифицировать и изменять, и оно ограничено только последующей формулой изобретения.
[0076] Все термины, используемые в формуле изобретения, предполагают присвоение их очевидных и обычных значений, которые понятны специалистам в области техники, пока явное указание на противоположное не будет выполнено в данном документе. В частности, использование формы единственного числа должно читаться, чтобы перечислять один или более указанных элементов, пока формула изобретения не перечислит явное ограничение до противоположного.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2533854C1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2749924C1 |
| УПРАВЛЯЮЩЕЕ УСТРОЙСТВО РУЛЕНИЯ | 2021 |
|
RU2754282C1 |
| МОТОРНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ВЫПОЛНЕНИЕМ РУЛЕНИЯ ДЛЯ УПРАВЛЯЕМОГО КОЛЕСА | 2012 |
|
RU2555902C2 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ | 2019 |
|
RU2715963C1 |
| МЕХАНИЗМ ОБРАТНОЙ СВЯЗИ РУЛЕВОГО КОЛЕСА | 2018 |
|
RU2716525C2 |
| СИСТЕМА И СПОСОБ ДЛЯ УПРАВЛЕНИЯ РУЛЕНИЕМ И ТОРМОЖЕНИЕМ | 2018 |
|
RU2692415C1 |
| КОМПЬЮТЕР (ВАРИАНТЫ) И СПОСОБ УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2703389C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2587317C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ | 2019 |
|
RU2742314C1 |


Изобретение относится к транспортным средствам. Электронный блок управления рулевым актуатором транспортного средства запрограммирован с возможностью поворачивать колесо транспортного средства на первый угол поворота относительно начального положения и поворачивать колесо на второй угол поворота, вычисленный, чтобы уменьшить скручивание шины при определении, что транспортное средство является неподвижным. Также блок управления поворачивает колесо на окончательный угол поворота при определении, что движение транспортного средства является одним из начинающегося и инициированного. Уменьшается нагрузка скручивания шины на рулевой актуатор транспортного средства. 2 н. и 18 з.п. ф-лы, 9 ил.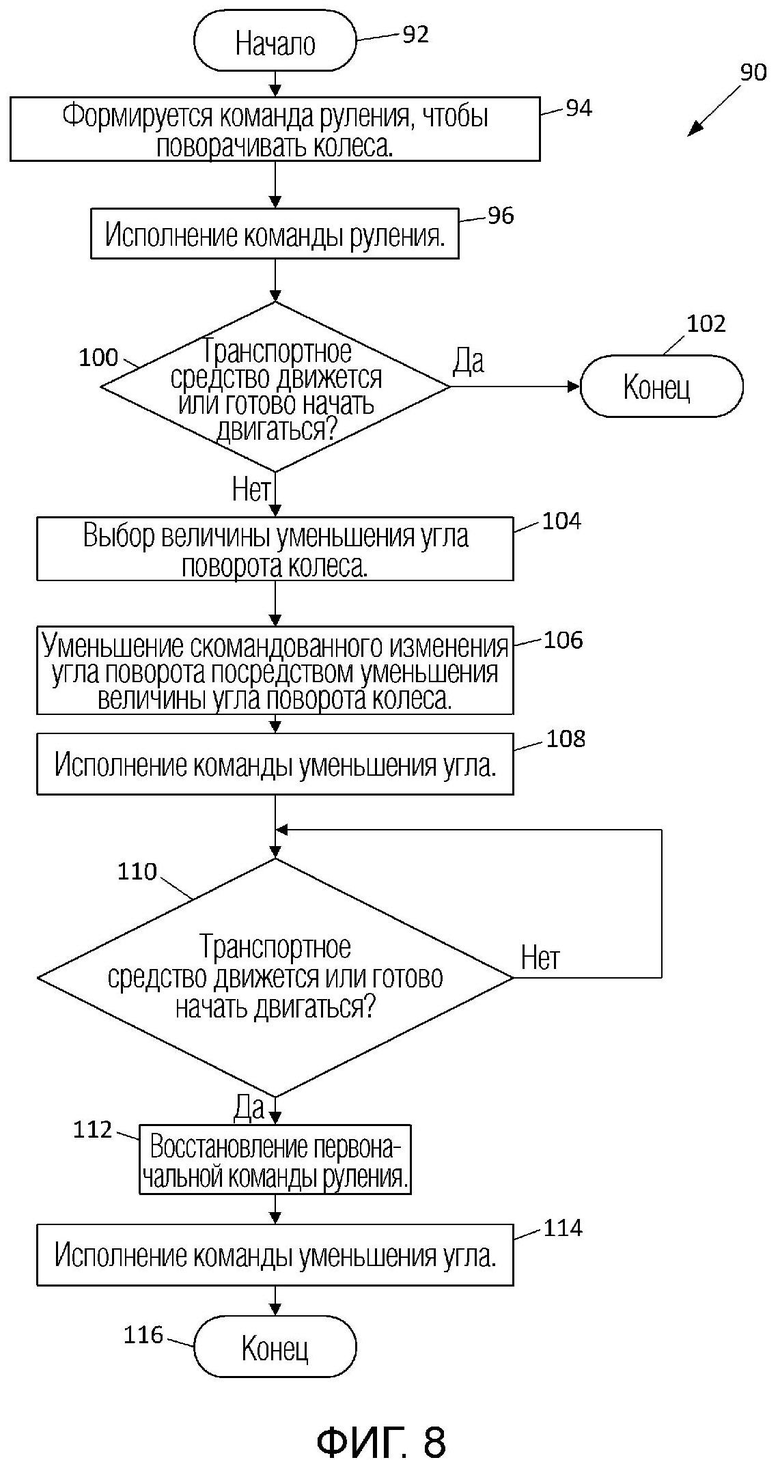
1. Электронный блок управления рулевым актуатором транспортного средства, запрограммированный с возможностью:
поворачивать колесо транспортного средства на первый угол поворота ходового колеса относительно начального положения;
поворачивать колесо транспортного средства на второй угол поворота ходового колеса, вычисленный, чтобы уменьшить скручивание шины при определении, что транспортное средство является неподвижным; и
поворачивать колесо транспортного средства на окончательный угол поворота ходового колеса при определении, что движение транспортного средства является одним из начинающегося и инициированного.
2. Электронный блок управления по п. 1, дополнительно запрограммированный с возможностью сохранять транспортное средство неподвижным, в то время как колесо транспортного средства поворачивается.
3. Электронный блок управления по п. 1, дополнительно запрограммированный с возможностью определять, когда движение должно быть инициировано.
4. Электронный блок управления по п. 1, дополнительно запрограммированный с возможностью вычислять второй угол поворота ходового колеса с помощью данных о положении управляемых колес и данных о токе мотора.
5. Электронный блок управления по п. 1, в котором второй угол поворота ходового колеса меньше первого угла поворота ходового колеса на угол между половиной максимального скручивания и полуторакратным максимальным скручиванием.
6. Электронный блок управления по п. 1, в котором окончательный угол поворота ходового колеса равен первому углу поворота ходового колеса.
7. Электронный блок управления по п. 1, в котором окончательный угол поворота ходового колеса равен второму углу поворота ходового колеса, и электронный блок управления дополнительно программируется с возможностью поворачивать колесо транспортного средства на промежуточный угол поворота ходового колеса, имеющий угол между половиной максимального скручивания и полуторакратным максимальным скручиванием, перед поворотом на второй угол поворота ходового колеса.
8. Электронный блок управления по п. 7, дополнительно запрограммированный с возможностью поворачивать колесо транспортного средства на промежуточный угол поворота ходового колеса, после того как первый угол поворота ходового колеса достигнут, и на второй угол поворота ходового колеса, после того как промежуточный угол поворота ходового колеса достигнут.
9. Электронный блок управления по п. 1, дополнительно запрограммированный с возможностью:
при определении, что первый угол поворота ходового колеса не находится в диапазоне ограничения движения:
устанавливать первый угол поворота ходового колеса, второй угол поворота ходового колеса и окончательный угол поворота ходового колеса равными друг другу, и
поворачивать колесо транспортного средства за пределы первого угла поворота ходового колеса на промежуточный угол поворота ходового колеса, имеющий угол между половиной максимального скручивания и полуторакратным максимальным скручиванием, перед поворотом на второй угол поворота ходового колеса; и
при определении, что первый угол поворота ходового колеса находится в диапазоне ограничения движения:
устанавливать окончательный угол поворота ходового колеса равным первому углу поворота ходового колеса, и
устанавливать второй угол поворота ходового колеса в меньший угол, чем первый угол поворота ходового колеса на угол между половиной максимального скручивания и полуторакратным максимальным скручиванием.
10. Электронный блок управления по п. 1, дополнительно запрограммированный с возможностью поворачивать колесо транспортного средства на второй угол поворота ходового колеса, после того как первый угол поворота ходового колеса достигнут.
11. Способ управления рулевым актуатором транспортного средства, причем способ содержит этапы, на которых:
поворачивают колесо транспортного средства на первый угол поворота ходового колеса относительно начального положения;
поворачивают колесо транспортного средства на второй угол поворота ходового колеса, вычисленный, чтобы уменьшать скручивание шины при определении, что транспортное средство является неподвижным; и
поворачивают колесо транспортного средства на окончательный угол поворота ходового колеса при определении, что движение транспортного средства является одним из начинающегося и инициированного.
12. Способ по п. 11, дополнительно содержащий этап, на котором сохраняют транспортное средство неподвижным, в то время как колесо транспортного средства поворачивается.
13. Способ по п. 11, дополнительно содержащий этап, на котором определяют, когда движение должно быть инициировано.
14. Способ по п. 11, дополнительно содержащий этап, на котором вычисляют второй угол поворота ходового колеса с помощью данных о положении руления и данных о токе мотора.
15. Способ по п. 11, в котором второй угол поворота ходового колеса меньше первого угла поворота ходового колеса на угол между половиной максимального скручивания и полуторакратным максимальным скручиванием.
16. Способ по п. 11, в котором окончательный угол поворота ходового колеса равен первому углу поворота ходового колеса.
17. Способ по п. 11, в котором окончательный угол поворота ходового колеса равен второму углу поворота ходового колеса и дополнительно содержащий этап, на котором поворачивают колесо транспортного средства на промежуточный угол поворота ходового колеса, имеющий угол между половиной максимального скручивания и полуторакратным максимальным скручиванием, перед поворотом на второй угол поворота ходового колеса.
18. Способ по п. 17, дополнительно содержащий этапы, на которых:
поворачивают колесо транспортного средства на промежуточный угол поворота ходового колеса, после того как первый угол поворота ходового колеса достигнут; и
поворачивают колесо транспортного средства на второй угол поворота ходового колеса, после того как промежуточный угол поворота ходового колеса достигнут.
19. Способ по п. 11, дополнительно содержащий этапы, на которых:
при определении, что первый угол поворота ходового колеса не находится в диапазоне ограничения движения:
устанавливают первый угол поворота ходового колеса, второй угол поворота ходового колеса и окончательный угол поворота ходового колеса равными друг другу, и
поворачивают колесо транспортного средства за пределы первого угла поворота ходового колеса на промежуточный угол поворота ходового колеса, имеющий угол между половиной максимального скручивания и полуторакратным максимальным скручиванием, перед поворотом на второй угол поворота ходового колеса; и
при определении, что первый угол поворота ходового колеса находится в диапазоне ограничения движения:
устанавливают окончательный угол поворота ходового колеса равным первому углу поворота ходового колеса, и
устанавливают второй угол поворота ходового колеса в меньший угол, чем первый угол поворота ходового колеса на угол между половиной максимального скручивания и полуторакратным максимальным скручиванием.
20. Способ по п. 11, дополнительно содержащий этап, на котором поворачивают колесо транспортного средства на второй угол поворота ходового колеса, после того как первый угол поворота ходового колеса достигнут.
| US 6380706 B1, 30.04.2002 | |||
| US 2003193305 A1, 16.10.2003 | |||
| US 2012101683 A1, 26.04.2012 | |||
| JP 2005329751 A, 02.12.2005 | |||
| JP 2007269070 A, 18.10.2007 | |||
| JP 2010228485 A, 14.10.2010 | |||
| KR 101612364 B1, 15.04.2016 | |||
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ЭЛЕКТРОМЕХАНИЧЕСКОГО УСИЛИТЕЛЯ РУЛЕВОГО УПРАВЛЕНИЯ | 2006 |
|
RU2304062C1 |

