Изобретение относится к системам навигации и контроля перемещения объектов в пространстве и может быть использовано в любой ситуации, где есть потребность в контроле или автоматизации движения транспортного средства, робота, привода, инструмента или другого технического средства. В том числе изобретение может быть использовано в системах:
- автоматической стыковки космических аппаратов;
- автоматической посадки летательных аппаратов различного класса (самолетов, вертолетов, автожиров, беспилотных летательных аппаратов) на подготовленные (аэродромы, авианосцы, буровые платформы) и неподготовленные (поле, луг, поляна, автомобильная дорога) взлетно-посадочные полосы (ВПП), в том числе в экстремальных условиях;
- автоматической навигации судов различного класса по фарватерам;
- автоматического управления наземными транспортными средствами различного класса (легковыми автомобилями, автобусами, грузовыми автомобилями) при их движении по автодорогам, автоматической парковке транспортных средств на автостоянках и в гаражных условиях;
- автоматической циркуляции транспорта по территории предприятия;
- автоматического движения сельскохозяйственной техники (тракторов, сеялок, комбайнов, поливальных машин) по сельскохозяйственным угодьям;
- автоматического управления группами летательных аппаратов или транспортных средств (полеты космических или других летательных аппаратов в группе, движение автомобилей в колонне);
- автоматического движения бытовой техники (поломоечных машин, пылесосов) в жилых и нежилых помещениях;
- автоматического управления приводами и робототехникой;
- автоматизации точных измерений в труднодоступных местах;
- ввода информации с расширенными возможностями (3D-мышь).
Проблема автоматизации навигации и контроля перемещения наиболее актуальна для критических маневров технических средств, связанных с опасностью для людей и возможностью повреждения самого движущегося средства или окружающих сооружений и оборудования. В частности, к таким маневрам относятся стыковка и движение в группе космических аппаратов; посадка и движение в группе летательных аппаратов, в том числе беспилотных; парковка и движение в группе наземных транспортных средств. В связи со значительным расширением в последнее время автоматизации процессов производства и бытового обслуживания проблема становится все более и более значимой и для других областей человеческой деятельности.
Один из способов решения проблемы автоматической навигации и контроля перемещения транспортных средств описан в патенте RU 2483987 С2 от 09.08.2011, МПК B64F 1/18, на способ посадки летательного аппарата. В этом способе посадка летательного аппарата осуществляется с помощью установки в районе ВПП шести датчиков лазерного излучения и оснащения летательного аппарата лазерным излучателем с устройством сканирования лазерного луча. Способ работает следующим образом. При заходе на посадку летательный аппарат по радио инициирует датчики лазерного излучения и начинает сканирование лазерным лучом пространства в районе ВПП. Обнаружив лазерный луч, датчик определяет направление лазерного луча и по радио передает его на летательный аппарат. При снижении (движении по глиссаде) летательный аппарат использует информацию от двух датчиков установленных на оси ВПП в ее концах. При посадке (движении параллельно ВПП, касании земли и торможении) используется информация от двух других датчиков, расположенных справа или слева от ВПП, в зависимости от направления посадки летательного аппарата.
Недостатком такого решения является постоянный радиообмен между летательным аппаратом и датчиками в процессе посадки, поскольку это требует использования многочисленными производителями летательных аппаратов и аэродромного оборудования одного стандартизованного формата радиообмена. Кроме того, радиообмен наполняет окружающее пространство электромагнитным излучением радиодиапазона, что ухудшает экологию, а большое количество (6) и активная конструкция датчиков, требующая стационарного или автономного электропитания, усложняют использование способа и снижают его надежность.
Наиболее близким по технической сущности к изобретению является способ посадки самолета, патент RU 2055785 от 04.04.1994, МПК B64F 1/20, G08G 5/02, выбранный в качестве прототипа. Данное техническое решение основано на определении местоположения самолета относительно ВПП по информации о расположенных в районе ВПП навигационных маяках (маркерах). Маяки изготавливаются двух типов: основные и дополнительные. Основной маяк представляет собой лампу видимого и инфракрасного излучения, на корпусе которой ортогонально закреплены металлические пластины, образующие уголковый отражатель, работающий в радиодиапазоне. В дополнительном маяке используется менее мощная лампа и отсутствуют металлические пластины. Основные маяки устанавливаются вдоль боковых кромок ВПП по обе стороны от ее оси на заданных расстояниях один от другого. На заданном расстоянии от основных маяков и в равном им количестве с каждой стороны от ВПП устанавливаются дополнительные маяки.
Способ работает следующим образом. При подлете самолета к ВПП и его снижении по глиссаде осуществляется поиск основных маяков, расположенных вдоль кромок ВПП: самолет излучает электромагнитные волны с помощью бортового радиолокатора и сканирует пространство в районе ВПП осью бортового приемного устройства видимого и инфракрасного диапазонов. От каждого обнаруженного основного маяка принимаются сигналы в трех диапазонах волн: радиодиапазоне, видимом и инфракрасном диапазонах. В радиодиапазоне принимаемые сигналы формируются отраженным металлическими пластинами маяка излучением радиолокатора, а в видимом и инфракрасном диапазонах - излучением лампы маяка. По сигналам, принятым в каждом диапазоне, строятся изображения совокупности маяков, эти изображения совмещаются и на совмещенном изображении выделяются три отметки - изображения трех маяков, два из которых расположены вдоль одной из боковых кромок ВПП, а третий напротив одного из них на другой боковой кромке ВПП. После этого бортовое приемное устройство переходит в режим слежения за маяками, а для автоматической посадки самолета используется система координат, центр которой совмещается с одним из маяков, ось Y направлена вдоль ВПП от наблюдателя через последующие маяки, ось X параллельна передней кромке ВПП, ось Z вверх. В данной системе координат положение самолета определяют по отношениям модулей векторов от центра изображения до выделенных отметок и углам между этими векторами. На этапах выравнивания, движения параллельно ВПП, касания земли и торможения часть основных маяков не попадает в поле зрения бортового приемного устройства. На этих этапах самолет прекращает излучение электромагнитных волн с помощью бортового радиолокатора и принимает сигналы только видимого и инфракрасного диапазонов от основных и дополнительных маркеров, расположенных с одной стороны от ВПП.
Недостатком прототипа является то, что для работы ламп маяков требуются источники стационарного или автономного электропитания - это ухудшает эксплуатационные качества и снижает надежность способа. Кроме того, способ требует установки большого количества маяков (как минимум трех основных и трех дополнительных) и знания расстояний между ними, что ограничивает универсальность способа и его применимость, особенно в условиях экстренной посадки на неподготовленные ВПП. Наконец, способ является недостаточно экологичным: работа способа основана на распространении в пространстве между самолетом и ВПП электромагнитного излучения радиодиапазона, а лампы маяков излучают электромагнитные волны видимого и инфракрасного диапазона вообще во все окружающее пространство.
Задачей, на решение которой направлено заявляемое изобретение, является совершенствование и универсализация способа управления движением объекта с помощью применения оптической навигационной системы с оптическими маяками особой конструкции.
Данная задача решается за счет того, что в известном способе осуществляют изготовление и установку в зоне движения объекта навигационных маяков, поиск и обнаружение сигналов от навигационных маяков, определение по этим сигналам текущего положения объекта в пространстве, формирование сигналов управления объектом для его следования по заданной траектории, при этом конструкцию маяков выбирают пассивной, пассивность конструкции маяков обеспечивают уголковыми отражателями оптического диапазона, уголковые отражатели для маяков выполняют двух размеров, большего и меньшего, поле видимости маяка формируют, включая в конструкцию маяка от одного до восьми уголковых отражателей большего размера, уголковые отражатели большего размера различают с помощью системы меток маяка, образованной уголковыми отражателями меньшего размера,
Технический результат, обеспечиваемый приведенной совокупностью признаков, заключается в упрощении, приведении к единообразной форме, повышении надежности и экологичности способа управления движением объекта, что в совокупности делает способ универсально применимым для решения самого широкого спектра задач навигационного характера. Сущность изобретения поясняется следующими чертежами:
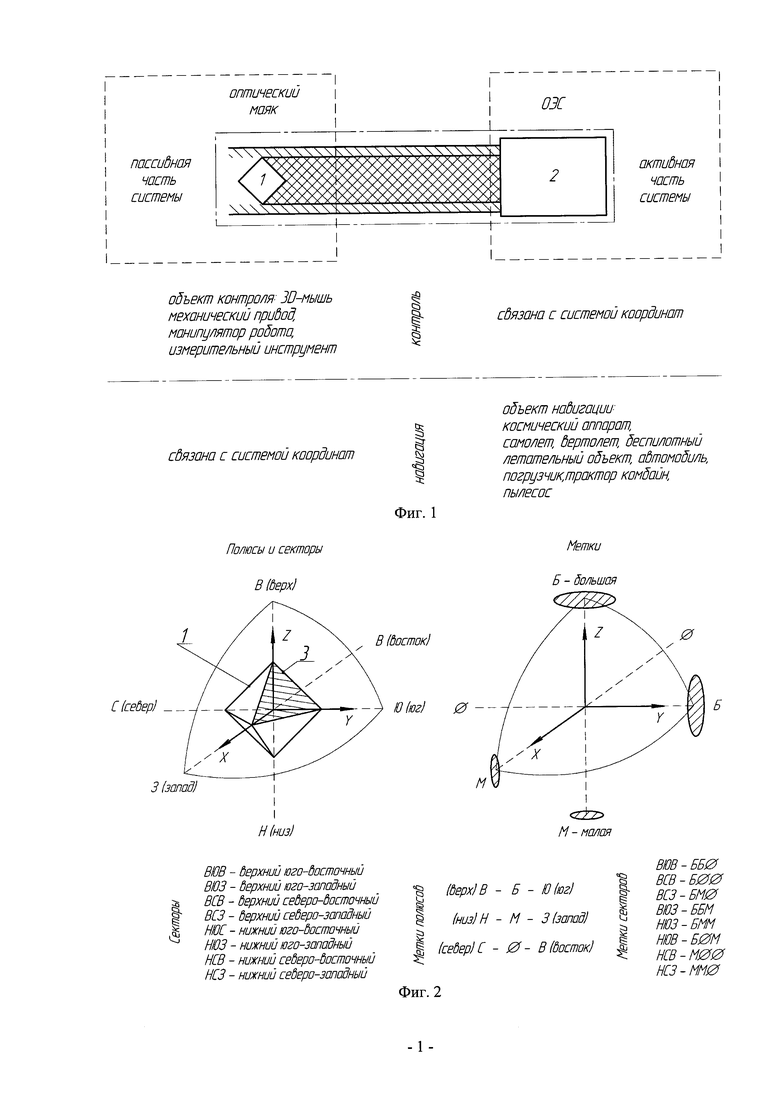
Фиг. 1 - схема оптической навигационной системы и ее деление на активную и пассивную части;
Фиг. 2 - схема конструкции оптического маяка со сферическим полем видимости и схема его разбиения на секции, соответствие между секциями маяка и секторами пространства;
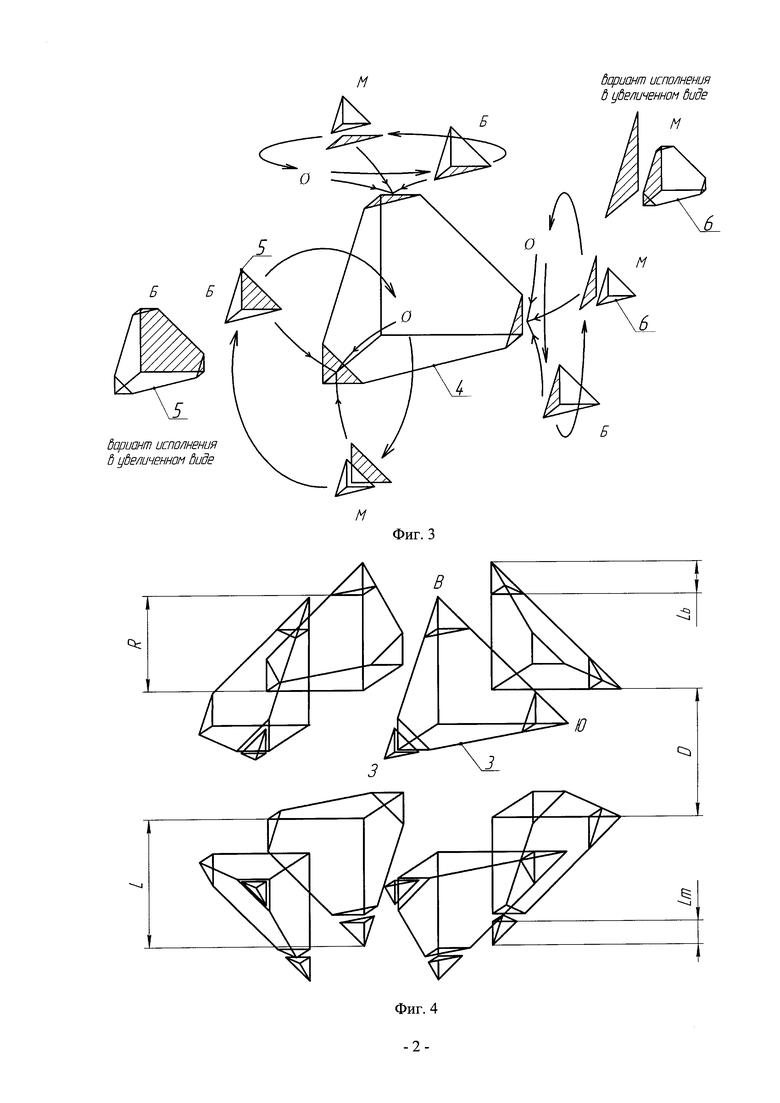
Фиг. 3 - устройство секции маяка;
Фиг. 4 - устройство оптического маяка со сферическим полем видимости;
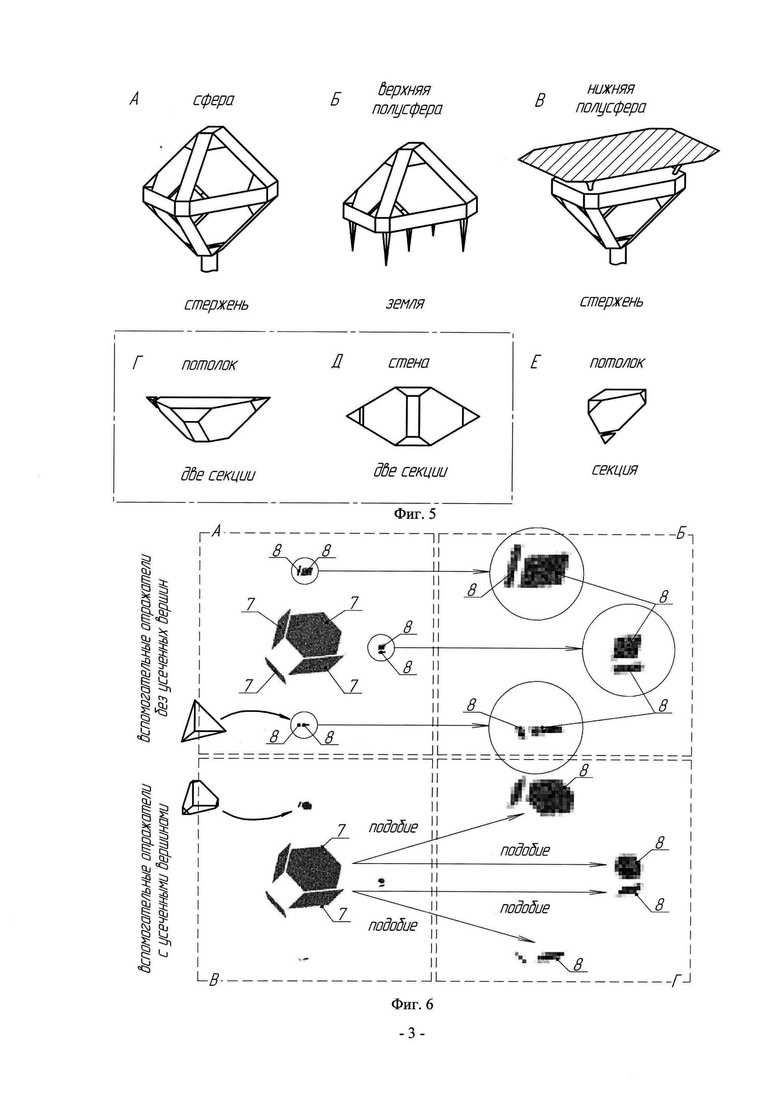
Фиг. 5 - варианты исполнения оптических маяков с различными полями видимости, а именно: фиг. 5, А - со сферическим полем видимости; фиг. 5, Б - с верхним полусферическим полем видимости; фиг. 5, В - с нижним полусферическим полем видимости, фиг. 5, Г, Д - с полем видимости в одну четверть сферы; наконец, фиг. 5, Е - с полем видимости в одну восьмую сферы;
Фиг. 6 - изображения маяка со сферическим полем видимости и отдельных его элементов при работе оптической навигационной системы;
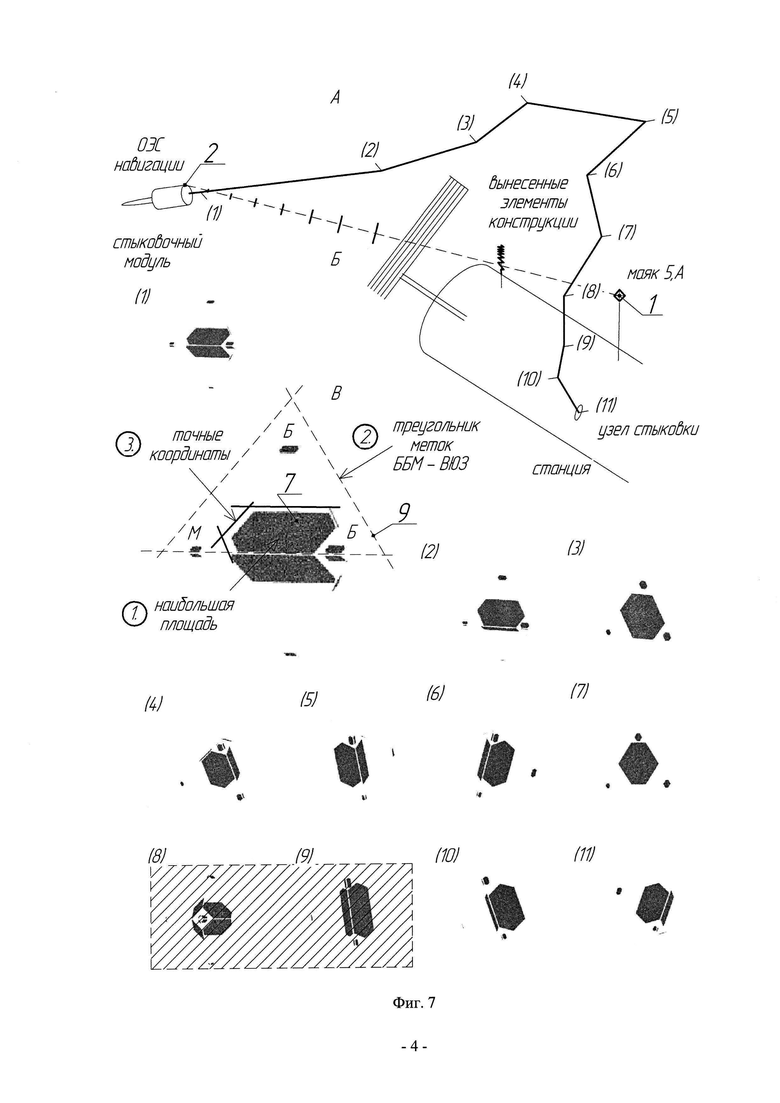
Фиг. 7 - работа маяка со сферическим полем видимости при стыковке транспортного модуля к орбитальной космической станции;
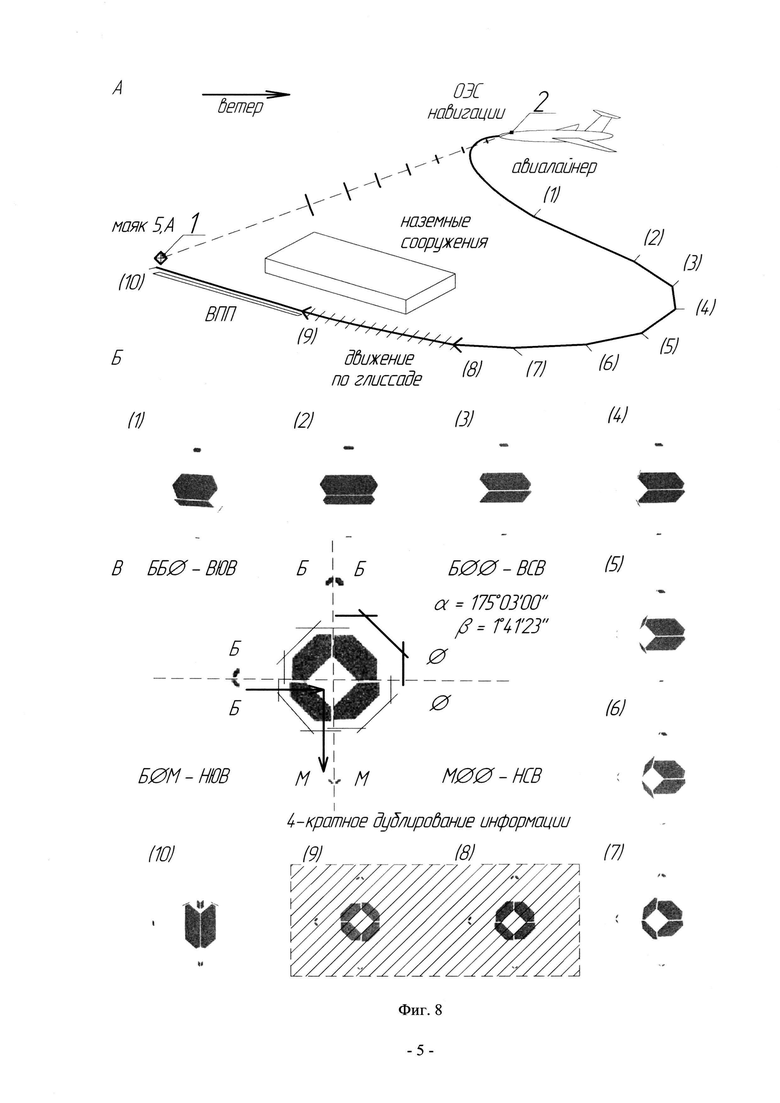
Фиг. 8 - работа маяка со сферическим полем видимости при посадке самолета и иллюстрация 4-кратного дублирования информации при работе универсальной оптической навигационной системы;
Фиг. 9 - работа маяков со сферическим полем видимости и верхним полусферическим полем видимости при посадке вертолета на палубу авианосца, отслеживание оптической навигационной системой раскачивания палубы;
Фиг. 10 - использование маяка с нижним полусферическим полем видимости при движении судна по фарватеру, движении автомобиля по автомагистрали и его парковке;
Фиг. 11 - использование маяка с полем видимости в четверть сферы, в частности, для организации, фиг. 11, А - автоматической циркуляции транспорта по территории предприятия, фиг. 11, Б - автоматической циркуляции сельскохозяйственной техники, фиг. 11, В - системы автопилотирования автомобилей по автомагистралям;
Фиг. 12 - использование маяка с полем видимости в одну восьмую сферы для, в частности, фиг. 12, А - создания автоколонн, фиг. 12, Б - автоматической парковки автомобилей, фиг. 12, В - организации автоматической циркуляции бытовой техники;
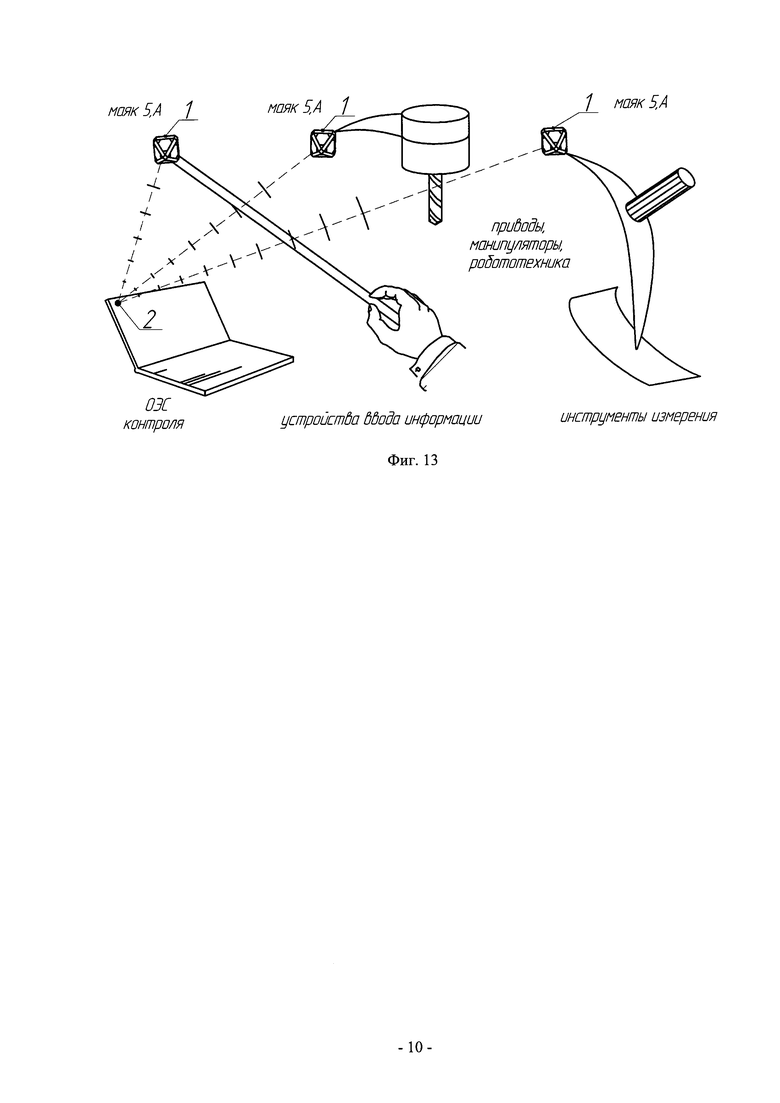
Фиг. 13 - использование маяка со сферическим полем видимости в системах контроля шести степеней свободы объекта, в том числе для ввода информации, измерений в труднодоступных местах и управления манипуляторами, приводами и робототехникой.
Заявленный способ управления движением объекта реализован оптической навигационной системой, схема которой приведена на фиг. 1. Эта система делится на две части: активную и пассивную. Пассивная часть состоит из оптического маяка 1, в качестве активной части используется устройство 2, описанное в патенте RU 2556282 С1 от 05.03.2014, МПК G01B 11, G01B 11/142, как оптико-электронная система (ОЭС). Работа ОЭС 2 в точности соответствует способу определения пространственной ориентации объекта с помощью ОЭС и уголкового отражателя, описанному в патенте RU 2556282 С1, в качестве оптического маяка 1 в патенте RU 2556282 С1 используется уголковый отражатель: ОЭС 2 сканирует пространство параллельным лучом света, диаметр которого превышает диаметр оптического маяка 1, и обнаруживает оптический маяк 1 по лучу света, отраженному оптическим маяком в обратном направлении. После этого ОЭС 2 позиционирует луч света таким образом, чтобы он освещал оптический маяк 1 полностью, и переходит в режим слежения, который поддерживает полную освещенность оптического маяка 1. В режиме слежения по лучу, отраженному оптическим маяком 1, ОЭС 2 определяет расстояние до оптического маяка и ориентацию маяка в виде трех углов последовательного разворота маяка вокруг трех взаимно-перпендикулярных осей, проходящих через центр маяка 1.
Заявленный способ управления движением объекта является развитием способа, изложенного в патенте RU 2556282 С1, за счет особой конструкции оптического маяка 1, обеспечивающей маяку более широкое по сравнению с уголковым отражателем поле видимости. В частности, эта конструкция обеспечивает и максимально широкое сферическое поле видимости, то есть видимость маяка и возможность работы по нему из всего окружающего пространства. Расширение поля видимости маяка приводит, прежде всего, к соответствующему расширению функционала отмеченных в патенте RU 2556282 С1 приложений способа в области контроля перемещения объектов. В этих приложениях ОЭС 2 жестко связывается с некоторой системой координат, которая, как правило, неподвижна, а оптический маяк 1 устанавливается на движущийся объект, например 3D-мышь, механический привод станка, манипулятор робота, измерительный инструмент. В таком случае способ патента RU 2556282 С1 используется как способ контроля за 6 степенями свободы объекта с закрепленным на нем маяком 1, движущегося в поле зрения ОЭС 2, в системе координат, связанной с ОЭС 2.
Однако главное достоинство оптического маяка 1 с широким, в том числе максимально широким - сферическим, полем видимости состоит в том, что он делает способ патента RU 2556282 С1 удобным для использования в приложениях, имеющих навигационный характер. В приложениях навигационного характера роль маяка 1 и ОЭС 2 меняется: оптический маяк 1 задает некоторую систему координат и, как правило, закрепляется неподвижно, а ОЭС 2 устанавливается на движущемся объекте. Определяя дальность до маяка 1 и его ориентацию, ОЭС 2 в этом случае определяет свое собственное положение в системе координат, заданной маяком 1. Это позволяет использовать способ патента RU 2556282 С1 для автоматического управления движением объекта, на котором установлена ОЭС 2, в пространстве, окружающем оптический маяк 1.
Спектр навигационных приложений способа патента RU 2556282 С1 с оптическими маяками 1, имеющими сферические и другие расширенные поля видимости, очень разнообразен и охватывает практически все сферы человеческой деятельности. Например, далее будут рассмотрены примеры, где ОЭС 2 используется для управления движением космического аппарата, самолета, вертолета, речного или морского судна, автомобилей, транспортера, поломоечной машины. В связи с этим ОЭС 2, используемая для целей навигации, называется далее ОЭС навигации, а оптическая навигационная система, схема которой приведена на фиг. 1, и заявленный способ управления движением объектов, который реализует эта система, - универсальным.
Схема конструкции оптического маяка 1, имеющего сферическое поле видимости, показана на фиг. 2. Маяк 1 строится на базе октаэдра, имеет форму, напоминающую октаэдр, и состоит из восьми частей 3, называемых далее секциями. Каждая из секций 3 маяка 1 располагается в правильной трехгранной пирамиде с центром октаэдра в качестве вершины и одной из восьми граней октаэдра в качестве основания.
Октаэдр имеет три пары вершин, не принадлежащих одному и тому же ребру и три оси симметрии, проходящие через эти вершины и состоящие из двух полуосей с вершиной в центре октаэдра. Двум полуосям, лежащим на одной из этих осей, поставим в соответствие полюсы В "верх" и Н "низ", двум полуосям, лежащим на другой оси, - полюсы С "север" и Ю "юг", и наконец, двум полуосям, лежащим на третьей оси, - полюсы 3 "запад" и В "восток". Три плоскости, проходящие через каждые две из рассмотренных осей симметрии, разбивают все пространство на 8 секторов. Обозначим эти секторы по содержащимся в них полуосям, а именно, верхний северовосточный (ВСВ), верхний юго-восточный (ВЮВ), верхний северо-западный (ВСЗ), верхний юго-западный (ВЮЗ), нижний северо-восточный (НСВ), нижний юго-восточный (НЮВ), нижний северо-западный (НСЗ), нижний юго-западный (НЮЗ). Свяжем с маяком 1 систему координат XYZ с началом координат в центре октаэдра и осями X, Y, Z, определяемыми любой тройкой полуосей В (верх), Н, С, Ю, З, В (восток), не лежащих в одной плоскости, например, на фиг 2, А, ось X (и ее направление) задается полуосью З, ось Y - полуосью Ю, ось Z - полуосью В (верх).
По построению каждая из секций маяка содержится в одном из секторов пространства. Предположим, что в качестве секций маяка используются уголковые отражатели, входные грани которых совпадают с гранями октаэдра. В этом случае входная грань каждого из уголковых отражателей будет видимой из любой точки сектора, содержащего уголковый отражатель, а также, в зависимости от показателя преломления отражателя, из некоторых точек пространства вне этого сектора. Поэтому оптический маяк 1 с секциями в виде уголковых отражателей может использоваться вместе со способом патента RU 2556282 С1 для автоматической навигации объекта с установленной на нем ОЭС навигации 2 в каждом из секторов пространства отдельно. Однако этого еще недостаточно для автоматической навигации объекта во всем пространстве, окружающем маяк: при идентичных секциях маяка для ОЭС навигации 2, управляющей объектом, невозможно определить, в каком именно секторе пространства этот объект находится.
Для того чтобы ОЭС навигации 2 могла различать секторы пространства, в каждой из секций маяка заявленный способ предлагает использовать от одной до трех меток, расположенных вблизи полуосей, задающих соответствующий секции сектор пространства. Предусмотрены метки двух типов: большая, обозначаемая Б, и малая, обозначаемая М. Отсутствие метки обозначается ∅. Один из вариантов установления взаимнооднозначного соответствия между секторами и наборами меток показан на фиг. 2, Б. При этом варианте сначала устанавливается следующее соответствие между полюсами и метками, каждая метка ставится в соответствие двум полюсам: В (верх) - Б, Ю (юг) - Б, З (запад) - М, Н (низ) - М, В (восток) - ∅, С (север) - ∅. Затем сектору ставится в соответствие упорядоченный набор меток по полюсам, участвующим в названии сектора. Метки в наборе перечисляются в порядке следования полюсов по часовой стрелке, если смотреть на секцию маяка извне. Перечисление меток в наборе начинается таким образом, чтобы сначала следовало по возможности большее количество меток Б или по возможности большее количество меток М, если метки Б в наборе отсутствуют. Например, верхнему юго-западному сектору ВЮЗ ставится в соответствие набор меток ББМ. Аналогично устанавливаются и другие соответствия: ВСВ - Б∅∅, ВЮВ - ББ∅, ВСЗ - БМ∅, НСВ - М∅∅, НЮВ - Б∅М, НСЗ - ММ∅, НЮЗ - БММ. Полученные восемь наборов меток (БММ, Б∅∅, ББ∅, БМ∅, М∅∅, Б∅М, ММ∅, БММ) обладают следующими свойствами:
1) никакие два набора, за исключением наборов БМ∅ и Б∅М, не обладают одинаковым составом меток, например в наборе Б∅∅ одна большая метка, а в наборе БММ одна большая метка и две маленькие метки;
2) наборы меток БМ∅ и Б∅М, обладающие одинаковым составом меток (одна большая метка и одна малая метка), отличаются порядком следования меток;
3) никакой набор не содержит трех одинаковых меток;
4) метки, лежащие на границах соседних секторов, совпадают, например сектор ВЮВ имеет метки ББ∅, а соседний с ним сектор ВЮЗ - метки ББМ, при этом на границе секторов в каждом из секторов лежат одни и те же метки ББ.
Свойства 1) и 2) дают ОЭС навигации 2 возможность определить по набору меток, в каком именно секторе пространства находится объект, на котором она установлена. Свойства 3) и 4) дают ОЭС навигации 2 возможность, находясь в некотором секторе, определить, как расположены по отношению к этому сектору другие секторы. Например, для того чтобы попасть в сектор ВЮВ с метками ББ∅, находясь в секторе ВЮЗ с метками метки ББМ, нужно двигаться в сторону расположения двух меток ББ. Дополнительно свойство 3) позволяет снять ограничение патента RU 2556282 С1 по определению ориентации с точностью до угла скручивания 120°.
Устройство секции 3 оптического маяка показано на фиг. 3. Основу секции маяка составляет уголковый отражатель 4, называемый базовым. Используя базовый уголковый отражатель, ОЭС навигации 2 определяет точное положение объекта, на которой она установлена, в секторе пространства, соответствующем секции 3. Части базового уголкового отражателя 4, прилегающие к трем вершинам его входной грани, усекаются - срезаются параллельно отражающим граням, не содержащим данных вершин. В зависимости от сектора пространства, соответствующего секции маяка, в каждую из трех образовавшихся ниш помещается либо уголковый отражатель 5 большего размера, соответствующий большой метке Б, либо уголковый отражатель 6 меньшего размера, соответствующий малой метке М, либо не помещается ничего. Части, прилегающие к вершинам входных граней уголковых отражателей 5 и 6, соответствующих меткам Б и М, могут быть усечены - срезаны параллельно отражающим граням, не содержащим данных вершин, в точности так же, как это сделано у базового уголкового отражателя 4, эти варианты исполнения показаны на фиг. 3 в увеличенном виде. Далее для упрощения уголковые отражатели 5 и 6, соответствующие меткам Б и М, будут изображаться целиком, независимо от того, имеют они в действительности усеченные части или нет.
На фиг. 4 оптический маяк со сферическим полем видимости собирается из восьми секций 3, соответствующих восьми секторам пространства. Каждая из этих секций показана на фиг. 4 с установленными в ней уголковыми отражателями 5 и 6, соответствующих меткам Б и М. Например, секция 3 маяка, соответствующая сектору ВЮЗ, несет два уголковых отражателя 5, соответствующих метке Б, и один уголковый отражатель 6, соответствующий метке М. Размеры базового уголкового отражателя: L - без учета усеченных частей и R, R<L, - с учетом усеченных частей; расстояние D между секциями маяка; размер Lb уголкового отражателя 5, соответствующего метке Б, без учета усеченных частей; размер Lm уголкового отражателя 6, соответствующего метке М, без учета усеченных частей могут настраиваться в зависимости от приложения. Если части уголковых отражателей 5 и 6, прилегающие к вершинам их входных граней, усекаются, то это предпочтительнее делать таким образом, чтобы уголковые отражатели 5 и 6 были подобными базовому уголковому отражателю. В этом случае размеры Rb, Rb<Lb, и Rm, Rm<Lm, уголковых отражателей 5 и 6 с учетом усеченных частей удовлетворяют отношениям Rb/Lb=Rm/Lm=R/L.
В собранном виде оптический маяк со сферическим полем видимости показан на фиг. 5, А. Такой маяк может быть закреплен либо контактным способом (например, на столбе или стержне), как это показано на фиг. 5, А, либо бесконтактным способом (например, в космосе на орбите Земли). Сферичность поля видимости маяка, показанного на фиг. 5, А, означает, что маяк является видимым из всего трехмерного пространства, окружающего маяк внутри некоторой сферы, за пределами которой работа по маяку становится невозможной из-за явлений дифракции и рассеяния света. Перемещения во всех трех измерениях одновременно осуществляются в космосе, воздухе, а также воде. Из-за высокого рассеяния света использование точной оптики в воде маловероятно. Соответственно, маяки со сферическим полем видимости наиболее целесообразны для обеспечения навигации космических аппаратов (стыковка, совместный полет) и посадки летательных аппаратов различного типа (самолетов, вертолетов, беспилотных летательных аппаратов). Применение маяков со сферическим полем видимости иллюстрируется далее на фиг. 7-9.
В ряде случаев сферическое поле видимости от маяка не требуется. Например, при посадке вертолета маяк может быть закреплен прямо на поверхности Земли: при посадке вертолет движется по достаточно крутой траектории, часто близкой к вертикальной, поэтому закрепленный на Земле маяк хорошо виден из любой точки траектории вертолета. Однако в таком случае вертолет все время находится сверху или, иными словами, в верхней полусфере маяка, нижняя половина маяка не используется - она могла бы быть видимой только из-под поверхности Земли. В таком случае вместо маяка со сферическим полем видимости удобнее установить маяк с верхним полусферическим полем видимости, показанный на фиг. 5, Б. Фактически, такой маяк представляет собой верхнюю половину маяка со сферическим полем видимости с доработками, необходимыми для обеспечения его крепления на поверхности земли. Использование маяков с верхним полусферическим полем видимости целесообразно при посадке вертолетов и беспилотных летательных аппаратов, в частности, в полевых условиях при необходимости быстрого обозначения или изменения зоны посадки.
Достаточно интересным для применения оказывается маяк с нижним полусферическим полем видимости, показанный на фиг. 5, В. Фактически, такой маяк представляет собой нижнюю половину маяка со сферическим полем видимости, также крепится на столбе или стержне и может иметь защиту от осадков. Использование маяков с нижним полусферическим полем видимости удобно при автоматизации движения объектов по траекториям, лежащим заведомо ниже точки крепления маяка, например, при автоматизации навигации морских и речных судов по фарватерам, перемещения автомобилей по автодорогам, размещения автомобилей на автостоянках. Использование маяка с нижним полусферическим полем видимости для всех этих трех целей одновременно показано на фиг. 10.
На фиг. 5, Г, Д, показан в различных положениях в пространстве один и тот же маяк, состоящий из двух секций оптического маяка со сферическим полем видимости и имеющий поле видимости, равное четверти сферы. Расположение маяка, показанное на фиг. 5, Г, идеально подходит для крепления на стыке стены и потолка. Такое крепление может быть использовано, скажем, при автоматизации движения транспорта на Т-образных перекрестках в производственных помещениях. При другом расположении в пространстве, показанном на фиг. 5, Д, тот же самый маяк, состоящий из двух секций оптического маяка сферического поля зрения, удобен для закрепления и может использоваться на обочинах автодорог в дополнение или в качестве замены обыкновенных дорожных отражателей. На автодорогах, оборудованных такими оптическими маяками возможна организация автоматической навигации транспортных средств. Применение маяков с полем видимости в четверть сферы как в расположении 5, Г, так и в расположении 5, Д, иллюстрируется на фиг. 11.
Наконец, оптический маяк, изображенный на фиг. 5, Е, состоит всего из одной секции оптического маяка со сферическим полем видимости, имеет поле видимости в одну восьмую сферы и, фактически, является уголковым отражателем, дополненным меткой. Маяк, изображенный на фиг. 5, Е, удобно использовать для закрепления в углах помещений, образованных стыком двух стен и потолка. В гараже закрепленный таким образом маяк может служить как (пассивная) часть системы автоматической парковки транспортного средства, которое водитель подогнал к воротам гаража. Использование оптического маяка с полем видимости в одну восьмую сферы внутри жилых или нежилых помещений позволяет также автоматизировать любые операции, связанные с перемещением внутри этих помещений механических средств, например таким образом может быть полностью автоматизирована уборка помещения. Использование маяков с полем видимости в одну восьмую сферы иллюстрируется на фиг. 12.
При работе универсальной оптической навигационной системы луч, отраженный оптическим маяком 1, используется ОЭС навигации 2 для формирования (на фотоприемной матрице) изображения маяка 1. Далее по этому изображению ОЭС навигации 2 определяет углы разворота маяка относительно оси визирования и тем самым свое собственное положение в системе координат маяка. Фиг. 6 демонстрирует различия в изображениях двух маяков со сферическим полем видимости. В конструкции одного из этих маяков в качестве вспомогательных уголковых отражателей, реализующих метки Б и М, используются обычные уголковые отражатели без усеченных вершин. В конструкции другого маяка вершины вспомогательных уголковых отражателей усечены и вспомогательные уголковые отражатели каждой секции маяка подобны базовому уголковому отражателю той же секции.
На фиг. 6, А, показано полное изображение оптического маяка со сферическим полем видимости, в конструкции которого используются вспомогательные уголковые отражателями без усеченных вершин. Это изображение состоит из четырех изображений 7 базовых уголковых отражателей 4 и шести изображений 8 вспомогательных уголковых отражателей 5 и 6. Для удобства изображения 8, являющиеся довольно мелкими на фиг. 6, А, показаны на фиг. 6, Б, в увеличенном виде. На фиг. 6, В, показано полное изображение оптического маяка со сферическим полем видимости, в конструкции которого роль меток Б и М выполняют вспомогательные уголковые отражатели с усеченными вершинами, причем вспомогательные уголковые отражатели каждой секции подобны базовому уголковому отражателю этой секции. На фиг. 6, Г, изображения 8, являющиеся мелкими на фиг 6, В, показаны в увеличенном виде.
Легко видеть, что для каждой секции оптического маяка, изображенного на фиг. 6, В, Г, форма изображений 8 вспомогательных уголковых отражателей с усеченными вершинами в точности совпадает с формой изображения 7 базового уголкового отражателя той же самой секции - эти изображения подобны и отличаются только размерами. Это облегчает распознавание изображений 8 вспомогательных уголковых отражателей, реализующих метки Б и М, что особенно важно для секций с наборами меток Б∅∅ и М∅∅, а также ББ∅ и ММ∅, где в наборе присутствуют метки только одного типа (Б или М). Подобие изображений позволяет в этом случае привязать размеры изображений 8 меток к размеру изображения 7 базового уголкового отражателя, например можно изготовить вспомогательные уголковые отражатели, реализующие метки, таким образом, чтобы площадь изображения метки Б составляла 1/20, а площадь изображения метки М - 1/40 от площади изображения базового уголкового отражателя.
Использование в качестве меток Б и М вспомогательных уголковых отражателей без усеченных вершин технологически проще и по-прежнему допускает распознавание изображений меток Б и М. Однако, как показывают фиг. 6, А, Б, в этом случае формы изображений 8 меток одной секции подобны друг другу, но отличаются от формы изображения 7 базового уголкового отражателя той же секции, поэтому распознавание меток требует более сложного алгоритмического обеспечения. Для упрощения будем предполагать, что везде далее используются оптические маяки, в каждой секции которых вспомогательные уголковые отражатели, реализующие метки Б и М, выполнены с усеченными вершинами и подобны базовому уголковому отражателю этой секции. В качестве изображений оптических маяков везде далее будут использоваться изображения типа приведенного на фиг. 6, В.
На фиг. 7 показано применение оптического маяка 1 со сферическим полем видимости типа 5, А (типа маяка, изображенного на фиг. 5, А), в космическом пространстве. В данном случае маяк используется для осуществления автоматической навигации стыковочного модуля в районе вынесенных элементов конструкции орбитальной станции к узлу стыковки. Фиг. 7, А, где показано взаимное расположение станции, маяка и модуля, демонстрирует одно из основных преимуществ универсальной оптической системы навигации: оптический маяк 1 и узел стыковки пространственно разнесены, узел стыковки находится на корпусе орбитальной станции, а маяк 1 является одним из вынесенных элементов конструкции. Тем не менее, как только маяк 1 попадает в поле зрения ОЭС навигации 2 стыковочного модуля, дальнейшая навигация модуля выполняется автоматически. При этом используется система координат оптического маяка 1. Расположение стыковочного узла и вынесенных элементов конструкции станции не меняется, поэтому данные об их координатах в системе координат маяка 1 ОЭС навигации 2 имеет заранее или получает при подлете к орбитальной станции. Данные о текущих координатах модуля в системе координат маяка 1 ОЭС навигации 2 получает, освещая маяк 1 лучом света и обрабатывая световой луч, возвращаемый маяком 1. Располагая данными как о текущих координаты модуля, так и координатах стыковочного узла и вынесенных элементов конструкции орбитальной станции, ОЭС навигации 2 формирует безопасную траекторию движения модуля к узлу стыковки.
Как уже отмечалось ранее, информация, получаемая ОЭС навигации 2 модуля при обработке светового луча, возвращенного оптическим маяком 1, состоит из дальности до маяка и угловых координат направления на модуль в системе координат маяка 1. Дальность до маяка 1 определяется дальномером, входящим в состав ОЭС навигации 2. Угловые координаты модуля получаются с помощью обработки изображений маяка в ОЭС навигации 2, представленных на фиг. 7, Б, для положений (1)-(7) модуля на траектории его движения, изображение для положения (1) расположено немного обособленно. Алгоритм обработки одного изображения иллюстрируется на фиг. 7, В, для положения (1) стыковочного модуля и состоит из следующих этапов.
1) Выделить изображение 7 базового уголкового отражателя, имеющего наибольшую площадь. Изображение 7 наибольшей площади создается базовым уголковым отражателем, расположенным в секции маяка, соответствующей сектору пространства, в котором модуль находится в данный момент времени, то есть в котором находится положение (1).
2) Выделить изображения вспомогательных уголковых отражателей, реализующих метки для секции базового уголкового отражателя. Эти изображения расположены вокруг изображения 7 базового уголкового отражателя и образуют характерный треугольник 9, который далее называется треугольником меток. Метки треугольника 9 определяют сектор пространства, в котором находится модуль. На фиг. 7, В, в треугольник меток 9 входят метки ББМ. Это означает, что модуль находится в ВЮЗ (верхнем юго-западном секторе) системы координат маяка 1.
3) Определить точные угловые координаты модуля в секторе ВЮЗ, а значит и системе координат маяка с помощью анализа формы выделенного изображения 7 базового уголкового отражателя, имеющего наибольшую площадь. Изображение базового уголкового отражателя наибольшей площади имеет форму шестиугольника, имеющего три пары параллельных сторон. Определение угловых координат модуля в системе координат маяка выполняется так, как это описано в патенте RU 2556282 С1, по наклонам сторон шестиугольника, выделенных на фиг. 7, В, линиями.
Необходимо обратить внимание на изображения маяка, которое ОЭС навигации 2 стыковочного модуля получает в положениях (8) и (9) на траектории движения модуля - на фиг. 7, Б, эти положения обведены пунктиром и выделены штриховкой. Каждое из этих изображений содержит сразу два изображения базовых уголковых отражателей маяка, имеющих форму четко выраженного шестиугольника. В этом случае координаты модуля в системе координат маяка могут быть определены двумя способами - по каждому из этих шестиугольников, что повышает надежность системы. Очевидно, что такие подобные изображения маяка, допускающие дублирование информации, возникают, когда показатель преломления уголковых отражателей маяка превосходит показатель преломления среды, а модуль находится вблизи границы двух или более секторов маяка.
Наибольшее количество секторов (по 4 сектора) пересекаются по направлениям В (верх) - Н (низ), С (север) - Ю (юг) и З (запад) - В (восток). Вблизи этих направлений оптический маяк обеспечивает наибольшее 4-кратное дублирование информации. Эту особенность универсальной оптической системы иллюстрирует фиг. 8 для случая посадки самолета.
На фиг. 8, А, показана траектория захода на посадку и приземления в аэропорту самолета с установленной на нем ОЭС навигации 2. Оптический маяк 1 со сферическим полем видимости типа 5, А, установлен на возвышении, так чтобы он мог обслуживать сразу несколько ВПП аэропорта. Самолет осуществляет посадку на одну из этих ВПП, расположенную таким образом, что направление З (запад) - В (восток) маяка 1 совпадает с направлением ВПП, поэтому при заходе на посадку на эту ВПП (независимо с какой стороны) при снижении самолета по глиссаде он все время находится вблизи направления З (запад) - В(восток) оптического маяка 1. При направлении ветра, показанном на фиг. 8, А, самолет заходит на посадку с востока; на траектории его движения отмечены положения (1)-(10). В положениях (1)-(7) самолет выполняет выход на глиссаду, в положении (8) начинает снижение по глиссаде, в положении (9) касается ВПП, в положении (10) останавливается в конце ВПП.
На фиг. 8, Б, показаны изображения оптического маяка 1, полученные в положениях (1)-(10) ОЭС навигации 2 самолета, используемой для автоматического управления посадкой самолета. Изображения маяка 1 в положениях (8) и (9), соответствующих началу и окончанию наиболее ответственного участка движения самолета по глиссаде, на фиг. 8, Б, обведены пунктиром и выделены штриховкой. Видно, что в положениях (8) и (9) изображения сразу четырех базовых уголковых отражателей оптического маяка 1 имеют форму четко выраженного шестиугольника. Следовательно, в положениях (8) и (9) и везде между ними, то есть на всем участке снижения по глиссаде, универсальная оптическая навигационная система обеспечивает максимальное 4-кратное дублирование информации.
На фиг. 8, В, находящейся в окружении изображений фиг. 8, Б, приведен вариант отображения данных о работе ОЭС навигации 2, которые могут выводиться на экран визуального контроля в кабину пилотов. Этот вариант представляет собой изображение маяка 1 для текущего положения самолета (в данном случае для положения (8)), снабженное дополнительной графической и текстовой информацией. Две пунктирные линии разделяют все изображение маяка на четыре части, соответствующие четырем секциям маяка, видимым из положения (8). Буквы Б, М и символ ∅ используются вне центральной части экрана для обозначения меток секций. В четырех углах экрана приведены сокращения ББ∅ - ВЮВ, Б∅∅ - ВСВ, Б∅М - НЮВ, М∅∅ - НСВ. Эти сокращения обозначают наборы меток, входящие в видимые секции маяка и соответствующие этим меткам секторы пространства. Две стрелки в левой нижней части иллюстрируют правильное определение набора меток Б∅М: начиная с метки Б, по часовой стрелке. При перечислении меток против часовой стрелки этот набор определился бы неправильно как БМ∅, что соответствовало бы сектору пространства ВСЗ. Каждое из четырех изображений базовых уголковых отражателей выделено тремя прямыми линиями. Это означает, что каждое из этих изображений распознано ОЭС навигации 2 как шестигранник, стороны которого параллельны линиям. Три линии рядом с изображением базового уголкового отражателя, расположенного справа сверху, то есть в секторе ВСВ, являются более толстыми и проведены на более значительном расстоянии от граней шестигранника. Это означает, что, определяя точное угловое положение самолета, из четырех возможных вариантов ОЭС навигации 2 в данном случае выбрала для обработки изображение базового уголкового отражателя, соответствующего сектору ВСВ. Результат обработки приведен здесь же - это азимут α=175°03'00ʺ и угол места α=1°41'23ʺ направления на самолет в системе координат маяка 1.
Фиг. 9 иллюстрирует использование универсальной оптической навигационной системы для управления посадкой вертолета на палубу раскачивающегося на волнах корабля. Для сравнения на фиг. 9 показана работа сразу двух оптических маяков: маяка со сферическим полем видимости, закрепленным на одной из мачт корабля, и маяка с верхним полусферическим полем видимости, закрепленного непосредственно на палубе. На фиг. 9, А, изображена траектория вертолета при посадке, на которой отмечены положения вертолета (1)-(7). В положениях (5) и (6) вертолет находится в одной и той же точке в пространстве в разные моменты времени, в этой точке вертолет зависает над палубой и оценивает ее раскачивание.
На фиг. 9, Б, приведены изображения маяка 1 со сферическим полем видимости типа 5, А, закрепленного на мачте над палубой корабля, для положений (1)-(7) вертолета на траектории его посадки. Изображения маяка для положений (5) и (6) на фиг 9, Б, обведены пунктиром и выделены штриховкой - эти изображения различаются, несмотря на то, что в положениях (5) и (6) вертолет находится в одной и той же точке пространства. Различие изображений для положений (5) и (6) вызвано раскачиванием палубы корабля - ОЭС навигации 2, установленная на вертолете, использует это для оценки параметров качки.
Вместо маяка 1 со сферическим полем видимости типа 5, А, для посадки вертолета на палубу корабля можно использовать маяк 1 с верхним полусферическим полем видимости типа 5, Б. В этом случае маяк располагается непосредственно на палубе. Для сравнения на фиг. 9, В, приведены изображения маяка 1 с верхним полусферическим полем видимости, полученные ОЭС навигации 2 для положений (1)-(7) вертолета на траектории его посадки. Опять-таки, различие в обведенных пунктиром и заштрихованных изображениях для положений (5) и (6), когда вертолет зависает над палубой, используется ОЭС навигации 2, установленной на вертолете, для оценки параметров раскачивания корабля.
Фиг. 10 демонстрирует применение оптического маяка 1 с нижним полусферическим полем видимости типа 5, В, одновременно для нескольких целей. На фиг. 10, А, показана схема расположения маяка. Маяк 1 закреплен на столбе, установленном на берегу моря; вблизи проходит автодорога; непосредственно за маяком находится автостоянка. Расположенный таким образом маяк может использоваться одновременно и независимо друг от друга, например для автоматической навигации судов по проходящему рядом с берегом морскому фарватеру, для автоматического управления автомобилями на близлежащем участке автодороги и для автоматической парковки автомобилей, прибывающих на находящуюся за маяком автостоянку.
На фиг. 10, Б, показаны изображения маяка 1, полученные ОЭС навигации 2 судна в те моменты времени, когда оно находится в положениях (1)-(8) на своем пути к причалу по фарватеру, расположенному в прибрежной зоне среди отмелей. Для того чтобы подчеркнуть динамику изменений, на каждом из этих изображений штриховыми линиями выделен треугольник, указывающий на расположение секции маяка с метками Б0М, соответствующей сектору пространства НЮВ.
На фигуре 10, В, показаны изображения маяка 1, полученные ОЭС навигации 2, установленной автобусе, для положений автобуса (1)-(8) на траектории его движения. Автобус сначала двигается по автодороге в сторону порта (положения (1)-(3)), затем съезжает на грунтовую дорогу (положения (4), (5)) и, наконец, останавливается на расположенной за маяком автостоянке (положения (6)-(8)). Выделенные сплошными линиями треугольники на изображениях маяка для положений автобуса (1)-(6) указывают на расположение секции маяка с метками М∅∅, соответствующей сектору пространства НСВ. Выделенные штриховыми линиями треугольники на изображениях маяка для положений автобуса (6)-(8) указывают на расположение секции маяка с метками ММ∅, соответствующей сектору пространства НСЗ.
Фиг. 11 иллюстрирует применение оптических маяков с полем видимости в четверть сферы типа 5, Г, Д, состоящих из двух секций маяка со сферическим полем видимости. Такие маяки могут быть полезны при организации автоматического управления движением транспортных средств в производственных помещениях, в районе сельскохозяйственных угодий или вдоль автодорог.
На фиг. 11, А, показано использование маяка 1 с полем видимости в четверть сферы типа 5, Г, для автоматизации движения транспорта на Т-образном перекрестке в производственном помещении. Транспортер с установленной на нем ОЭС навигации 2, используя маяк 1, автоматически определяет свое положение в пространстве, окружающем маяк, и таким образом автоматически движется к цели назначения в районе Т-образного перекрестка. Фиг. 11, А, содержит также изображения маяка 1 для трех различных положений (1), (2), (3) транспортера на траектории движения. Треугольники, выделенные на этих изображениях штриховыми линиями, демонстрируют изменение частей изображений, соответствующих одной из двух секции маяка 1.
Фиг. 11, Б, иллюстрирует использование маяка с полем видимости в четверть сферы типа 5, Г, для организации автоматической циркуляции сельскохозяйственной техники. В данном случае маяк 1 закреплен на столбе возле поля, что позволяет трактору с установленной на нем ОЭС навигации 2 обрабатывать поле в автоматическом режиме. Первый проход трактора по нужной траектории на поле может быть выполнен человеком, во время этого прохода ОЭС навигации 2 запоминает эту траекторию в системе координат маяка 1. Далее ОЭС навигации 2 использует маяк 1 для движения по той же самой траектории, но уже в автоматическом режиме. Фиг. 11, Б, содержит изображения маяка 1 для трех различных положений (1), (2), (3) трактора на траектории его движения. Для наглядности треугольники, выделенные на этих изображениях сплошными и штриховыми линиями, обозначают части изображений, соответствующих разным секциям маяка 1.
На фиг. 11, В, показано использование маяков с полем видимости в четверть сферы типа 5, Д, для организации движения транспорта на участке автодороги в автоматическом режиме. Для этого маяки через определенные промежутки закрепляются на ограждении автодороги, примерно там, где обычно находятся простые светоотражатели. Автомобиль с установленной на нем ОЭС навигации 2 следует по автодороге. Имея данные о схеме расположения маяков, ОЭС навигации 2 определяет расположение автомобиля на автодороге и управляет его движением по маяку 1, который в данный момент времени находится в поле зрения ОЭС навигации 2. На фиг. 11, В, показаны изображения маяка 1 для положения автомобиля (1), когда маяк 1 появляется в поле зрения ОЭС навигации 2, для положения (2), когда автомобиль проезжает напротив маяка 1, и для положения (3), когда маяк 1 выходит из поля зрения ОЭС навигации 2. Треугольниками, выделенными на этих изображениях сплошными и штриховыми линиями, обозначены части изображений, соответствующих разным секциям маяка 1. Когда маяк 1 выходит из поля зрения ОЭС навигации 2, в поле зрения ОЭС навигации 2 появляется следующий установленный по ходу движения автомобиля маяк и автомобиль продолжает движение по автодороге, ориентируясь далее по этому следующему маяку.
Фиг. 12 иллюстрирует возможные способы использования оптических маяков типа 5, Е, состоящих из одной секции маяка со сферическим полем видимости и имеющих поле видимости в одну восьмую сферы. Маяки такого типа имеют форму тетраэдра, поэтому само собой напрашивается их закрепление во внутренних углах зданий, образованных двумя стенами и потолком. В гаражных боксах закрепленные таким образом маяки могут быть использованы для автоматической парковки автомобилей, а в других жилых или нежилых помещениях - для организации автоматического перемещения внутри помещения бытовой техники, например пылесосов или поломоечных машин.
Кроме того, компактная (плоская) форма светопроводящей грани маяка типа 5, Е, делает удобным их применение на плоских поверхностях во всех случая, когда нет необходимости в большом поле видимости. Одно из применений такого рода показано на фиг. 12, А. Здесь маяки 1 типа 5, Е, закреплены на задней поверхности автомобилей примерно там, где обычно расположены пассивные светоотражатели, кроме того, автомобили оснащены ОЭС навигации 2. Оборудованные таким образом автомобили могут образовывать транспортные колонны неограниченной длины, в которых только первый автомобиль управляется водителем, а все остальные следуют за ним в автоматическом режиме.
Две такие колонны показаны на фиг. 12, А, одна из них состоит из трех автомобилей, вторая из двух. Следующие друг за другом в колонне автомобили образуют пары, в которых автомобиль, идущий первым, является ведущим, а автомобиль, идущий вторым, - ведомым. В первой колонне таких пар две (1) и (2), во второй - одна (3). В каждой из этих пар ОЭС навигации 2 ведомого автомобиля периодически определяет положение и ориентацию в пространстве маяка 1, установленного на ведущем автомобиле. При стандартном расположении маяка 1, например, посередине задней поверхности автомобиля, этой информации достаточно, чтобы ОЭС навигации 2 провела ведомый автомобиль в точности по траектории и со скоростью движения ведущего автомобиля.
Фиг. 12, А, включает примеры изображений маяков 1, полученных ОЭС навигации 2 ведомого автомобиля для пар (1), (2), (3). Обведенные пунктиром и выделенные штриховкой изображения для пар (1) и (2) практически идентичны, и до тех пор, пока автомобили движутся по прямому участку дороги, почти не меняются во времени. Небольшое различие изображений маяков для пар (1) и (2) обусловлено тем, что у идущего ведомым в паре (1) грузовика ОЭС навигации 2 располагается выше, чем у идущего ведомым в паре (2) легкового автомобиля. Значительное отличие изображения маяка для пары (3) от изображений для пар (1) и (2) обусловлено тем, что изображение для пары (3) получено в момент прохождения парой (3) поворота, когда ее ведущий автомобиль развернут относительно ведомого.
Фиг. 12, Б, иллюстрирует способ использования оптического маяка типа 5, Е, для автоматической парковки автомобиля. Маяк 1 закрепляется в дальнем верхнем углу гаражного бокса, образованном его задней и боковой стенками и крышей. Водитель подгоняет автомобиль с установленной на нем ОЭС навигации 2 к гаражному боксу таким образом, чтобы маяк 1 попал в поле зрения ОЭС навигации 2. Все остальное делает ОЭС навигации 2. Имея информацию о расположении маяка 1 в гаражном боксе и определяя свое собственное положение в системе координат, связанной с маяком 1, ОЭС навигации 2 рассчитывает траекторию заезда автомобиля в гаражный бокс и загоняет автомобиль в бокс по этой траектории в автоматическом режиме. Фиг. 12, Б, содержит изображения маяка 1, сформированные ОЭС навигации 2, для трех положений (1), (2), (3) на траектории заезда автомобиля в гаражный бокс.
На фиг. 12, В, показано использование оптического маяка типа 5, Е, внутри помещений. Маяк 1 закрепляется в одном из внутренних углов помещения, образованных стенами и потолком. Установленный таким образом маяк создает минимум помех. При этом он хорошо виден практически из любой точки помещения и может быть использован для автоматизации движения внутри помещения бытовой техники, например поломоечной машины, оснащенной ОЭС навигации 2. ОЭС навигации 2 определяет положение машины в системе координат маяка 1 и, имея информацию о параметрах помещения и месте закрепления маяка 1, перемещает поломоечную машину по заданной траектории внутри помещения. Фиг. 12, В, содержит изображения маяка 1, сформированные ОЭС навигации 2 для трех положений (1), (2), (3) машины на траектории ее перемещения по залу ожидания аэропорта или вокзала.
Наконец, фиг. 13 иллюстрирует применение маяка со сферическим полем видимости типа 5, А, вместо уголкового отражателя в системах контроля шести степеней свободы объекта, основанных на патенте RU 2556282 С1. В таких системах ОЭС 2 называется ОЭС контроля и закрепляется, как правило, неподвижно, например, на фиг. 13 ОЭС 2 встроена в персональный компьютер, а маяк 1 установлен на объекте, который перемещается в пространстве. Таким объектом может быть устройство ввода информации, например, в виде дирижерской палочки, привод станка или манипулятор робота, а также инструмент измерения поверхностей изделий в труднодоступных местах. В любом случае использование маяка со сферическим полем видимости вместо уголкового отражателя значительно расширяет диапазон различных положений объекта, в которых маяк 1 виден для ОЭС контроля 2 - фактически, маяк 1 становится видимым при любом положении объекта, в котором сам объект не перекрывает маяк 1.
Таким образом, конструкция оптического маяка с широким, в том числе, максимально широким - сферическим, полем видимости и использование такого оптического маяка вместо уголкового отражателя в способе определения пространственной ориентации объекта патента RU 2556282 С1 приводят к значительному расширению функциональных возможностей способа. В приложениях контроля положения объекта в пространстве, где маяк крепится на перемещающем объекте, это приводит к увеличению числа контролируемых ориентаций объекта в пространстве. Помимо приложений контроля появляется также значительное количество приложений навигационного характера, где маяк закрепляется неподвижно и задает систему координат, в которой перемещается объект. Сфера навигационных приложений охватывает любые перемещения объектов, простирается от автоматического пилотирования космических аппаратов до автоматического управления движением бытовой техники. При этом оптический маяк является пассивным, электромагнитное излучение радиодиапазона не используется вообще, а электромагнитное излучение оптического диапазона, за исключением очень непродолжительного периода поиска маяка, распространяется только вдоль прямой, соединяющей в данный момент времени маяк и объект. Это позволяет рассматривать использование оптического маяка, имеющего широкое поле видимости, со способом патента RU 2556282 С1 как универсальный, простой, надежный и, в дополнение к тому, экологичный способ управления движением объекта, имеющий широкий спектр применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТА С ПОМОЩЬЮ ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМЫ И УГОЛКОВОГО ОТРАЖАТЕЛЯ | 2014 |
|
RU2556282C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОСАДКОЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2518434C2 |
| КОМПЛЕКС СРЕДСТВ АВТОНОМНОЙ ПОСАДКИ БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА | 2023 |
|
RU2813215C1 |
| СПОСОБ ПОДГОТОВКИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ ЛЕТНОГО БАССЕЙНА ГИДРОАЭРОДРОМА ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПРИВОДНЕНИЯ ГИДРОСАМОЛЕТА | 2013 |
|
RU2539039C1 |
| Способ определения положения осевой линии взлетно-посадочной полосы | 1991 |
|
SU1804629A3 |
| СПОСОБ ЛОКАЛЬНОЙ НАВИГАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2018 |
|
RU2706444C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ РАЗЛИЧНЫХ КЛАССОВ (ВАРИАНТЫ) | 1999 |
|
RU2182313C2 |




Изобретение относится к способу управления движением объекта с помощью оптической навигационной системы. Для управления движением объекта устанавливают в зоне движения объекта навигационные маяки на основе пассивной конструкции уголковых отражателей двух размеров, большего и меньшего, производят поиск сигналов от навигационных маяков, определяют положение объекта в пространстве, формируют сигналы управления для следования объекта по заданной траектории. Обеспечивается повышение надежности, экологичности и унифицированности управления движением объекта. 13 ил.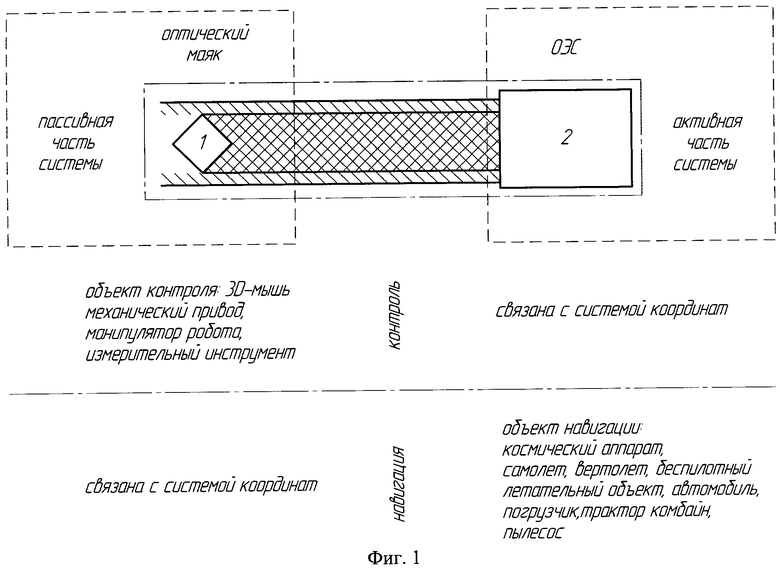
Универсальный способ управления движением объекта с помощью оптической навигационной системы, включающий
- изготовление и установку в зоне движения объекта навигационных маяков;
- поиск и обнаружение сигналов от навигационных маяков;
- определение по этим сигналам положения объекта в пространстве;
- формирование сигналов управления объектом для его следования по заданной траектории, отличающийся тем, что
- конструкцию маяков выбирают пассивной;
- пассивность конструкции маяка обеспечивают уголковыми отражателями оптического диапазона;
- уголковые отражатели выполняют двух размеров, большего и меньшего;
- поле видимости маяка формируют, включая в конструкцию маяка от одного до восьми уголковых отражателей большего размера;
- а уголковые отражатели большего размера различают с помощью системы меток маяка, образованной уголковыми отражателями меньшего размера.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА ПОСРЕДСТВОМ ИСПОЛЬЗОВАНИЯ СВЯЗИ С ПОМОЩЬЮ СВЕТА В ВИДИМОЙ ОБЛАСТИ СПЕКТРА | 2008 |
|
RU2406232C2 |
| ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ | 2000 |
|
RU2208556C2 |
| WO 2005098476 A1, 20.10.2005 | |||
| Уголковый отражатель | 1990 |
|
SU1748108A1 |
| СПОСОБ ПРОИЗВОДСТВА ИНСТАНТ-ПОРОШКА ДЛЯ ЦИКОРНОГО НАПИТКА | 2008 |
|
RU2369248C1 |

