Изобретение относится к контрольно-измерительной технике и может быть использовано для контроля железнодорожного пути, в частности для определения отклонения железнодорожного пути от проектного положения.
Известно измерительное устройство (см. патент РФ №2212486, МПК Е01В 35/00, B61K 9/08, опубл. 20.09.2003, Бюл. №26), содержащее датчики измерения криволинейности пути в плане и/или в продольном профиле относительно базы измерительного устройства и/или измерения возвышения пути по уровню, устройство для автоматического определения положения пути относительно репера, размещаемого на обочине железнодорожного пути, и компьютером, с входами которого соединены все упомянутые датчики измерительного устройства и устройство для автоматического определения положения пути относительно репера.
К недостаткам известного устройства можно отнести то, что требуется проведение трудоемких подготовительных работ в виде дополнительного размещения рабочих реперов на обочине железнодорожного пути с привязкой реперов к проекту, создания и ведения базы данных проектного положения пути относительно рабочих реперов, конструктивную сложность используемой контрольно-измерительной системы и, как следствие этого, недостаточную точность измерений и, соответственно, недостаточная точность постановки пути в проектное положение.
Известно устройство для измерения геометрии рельсового пути (см. патент РФ №2256575, МПК B61K 9/08, Е01В 35/00, G01B 11/00, G01S 5/00, опубл. 20.07.2005, Бюл. №20), содержащее две измерительные тележки, на первой из которых (по ходу движения) установлен источник светового излучения, а на второй - приемник излучения, который представляет собой оптико-электронную приемно-анализирующую систему, визирная ось которой в номинальном положении устройства (на прямолинейном и горизонтальном участке рельсового пути) расположена параллельно базовому рельсу и на ней размещен источник излучения, причем обе тележки кинематически связаны транспортирующим средством и на обеих тележках установлены датчики уровня, а на одной из них расположен датчик пройденного пути, при этом оптическая приемно-анализирующая система подключена к электронному устройству выделения координатной информации, соединенному с программно-аппаратным комплексом алгоритмической обработки совокупной информации, с которым, в свою очередь, соединены датчики уровня и пройденного пути.
Однако известная система имеют существенный недостаток, а именно высокая погрешность определения положения пути и накопление ошибки измерений вследствие применения только относительного метода измерения, который базируется на формировании измерительной базы относительно перемещающихся измерительных тележек, что исключает привязку измерений по габаритам и конструкциям, вынесенных за пределы железнодорожного пути, а, следовательно, отсутствие определения железнодорожного пути в пространстве.
Техническая задача заключается в обеспечении более точного определения положения железнодорожного пути, следовательно, и более точном расчете перемещения железнодорожного пути для постановки в проектное положение.
Поставленная задача решается за счет того, что система для определения пространственного положения железнодорожного пути, включающая кинематически связанные измерительные тележки, на первой из которых (по ходу движения) установлен датчик уровня и датчик пройденного пути, на второй тележке установлен датчик измерения стрелы изгиба, подключенные к приемно-анализирующей системе, соединенной с программно-аппаратным комплексом алгоритмической обработки совокупной информации, снабжена закрепленным на первой по ходу движения измерительной тележке, блоком для измерения пространственного положения пути в плане, относительно измерительной базы, в качестве которой использованы конструкции, вынесенные за пределы рельсового пути и расположенные по ходу ее движения с известными пространственными координатами относительно железнодорожного пути, подсоединенным к аппаратно-программному комплексу, при этом блок для измерения пространственного положения пути в плане состоит из светодиодного маркера наведения, лазерного излучателя, оптического приемника лазерного сигнала, подсоединенных к электронному устройству для вычисления расстояния до объекта, смонтированный с возможностью поворота в вертикальной плоскости посредством сервопривода, подключенного к электронному устройству для вычисления расстояния до объекта.
Технический результат, достигается тем, что в блок памяти аппаратно-программного комплекса записывается информация о проектном положении железнодорожного пути, измеряются величины стрел изгиба железнодорожного пути в плане, положение пути по уровню, расстояние от центральной, продольной оси измеряемого железнодорожного пути до конструкций, вынесенных за пределы железнодорожного пути, расположенных на земной поверхности, прилегающих к измерительной линии железнодорожного пути (например, опоры линий электропередач) и увязывается полученная информация с измеренной величиной участка железнодорожного пути, пройденного измерительными тележками.
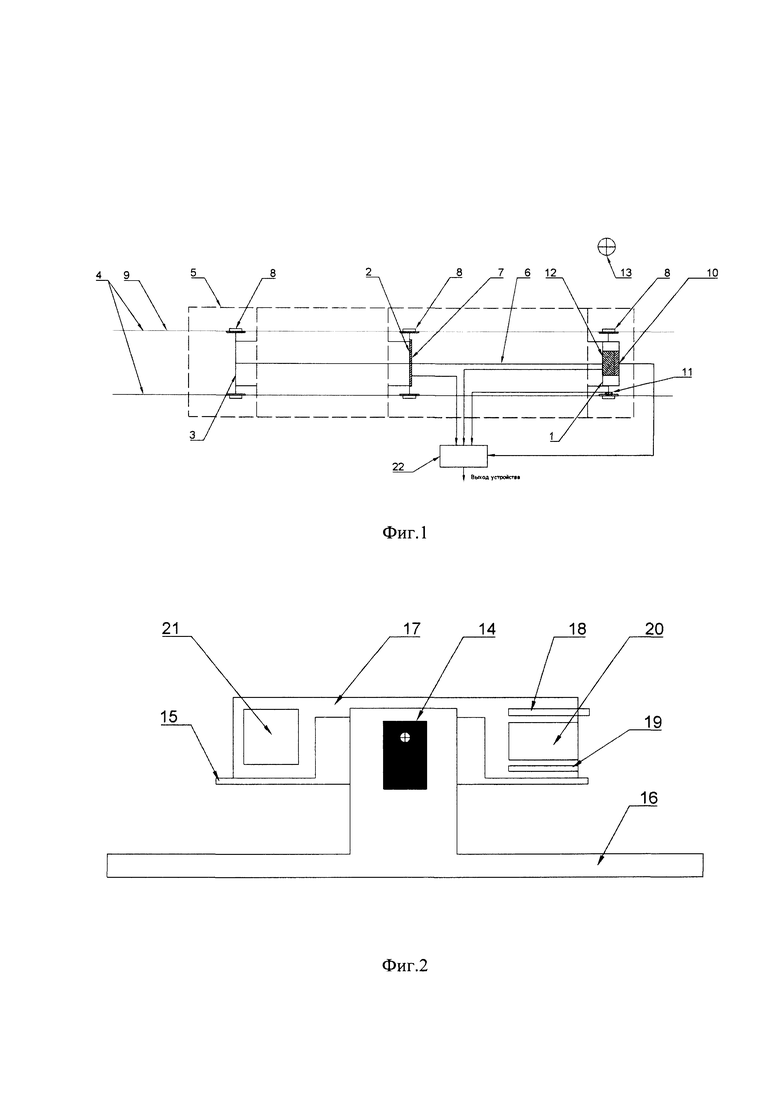
На приведенном чертеже на фиг. 1 изображена геометрическая схема измерений в плане рельсового пути, на фиг. 2 - схема блока для определения расстояний до конструкций, вынесенных за пределы железнодорожного пути.
Система содержит три измерительных тележки 1, 2, 3, которые установлены на рельсовом пути 4 и закреплены на раме 5, связанные кинематически, для чего между первой и третьей измерительными тележками по геометрическому центру колесных пар закреплен трос 6, образуя измерительную базу с помощью стрелографа 7, установленного на тележке 2, поводок которого контролирует положение троса, и измеряет стрелу изгиба в плане. При этом реборды колес 8 измерительных тележек 1, 2, 3 установлены на одной из нитей рельсового пути 4, принятого в качестве базового рельса 9. Указанные реборды колес поджимаются к боковой поверхности головки рельса и таким образом, пространственное положение тележек 1, 2, 3 полностью определяются положением базового рельса 9 и углом возвышения наружного рельса (углом наклона тележки 1). Для измерения угла наклона тележки на ней установлен датчик уровня 10. Для "привязки" результатов измерений к пройденному пути, то есть для обеспечения сопоставимости результатов измерений пикетажу, на тележке 1 расположен инкрементный датчик пройденного пути 11 (одометр). На тележке 1 также установлен блок для измерения пространственного положения пути в плане 12, относительно измерительной базы, в качестве которой используются конструкции 13, вынесенные за пределы рельсового пути (например, опоры линий электропередач), содержащее, смонтированную с возможностью поворота в вертикальной плоскости посредством сервопривода 14, площадку 15, установленную на раме 16, которая жестко закреплена по центру оси тележки 1, размещенную на площадке 15 в корпусе 17 оптическую приемно-анализирующую систему, состоящую из светодиодного маркера наведения 18, лазерного излучателя 19, оптического приемника лазерного сигнала 20, подключенные к электронному устройству для вычисления расстояния до объекта 21. Датчик уровня 10 и сервопривод 14 подключены к электронному устройству для вычисления расстояния до объекта 21. Датчик уровня 10, стрелограф 7, блок для измерения пространственного положения в плане 12, и датчик пройденного пути 11 подключены к аппаратно-программному комплексу (АПК) 22, с предварительно загруженным проектом пути, где осуществляется алгоритмическая обработка совокупной информации и вывод результатов этой обработки, в виде, удобном для дальнейшего использования, в частности, в экранно-графическом представлении. Выход аппаратно-программного комплекса является выходом устройства.
Устройство работает следующим образом. В процессе движения перемещаются измерительные тележки 1, 2 и 3, вдоль рельсового пути 4, прижатые к базовому рельсу 9. При отклонении положения базового рельса от прямой линии происходит смещение измерительных тележек 1, 2 и 3 по отношению друг к другу, стрелограф 7 фиксирует показания в стрелах изгиба и передает их в АПК 22, который вычисляет кривизну пути. Также во время движения, с датчиков пройденного пути 11 и уровня 10 измеренная информация фиксируется в АПК 22. При движении тележки 1 в створе с конструкциями 13, с датчика уровня 10 информация поступает в электронное устройство для вычисления расстояния до объекта 21, которая формирует сигнал и передает его на сервопривод 14 для позиционирования площадки 15 в горизонтальной плоскости, маркер наведения 18 визуально подсвечивает точку, в которую лазерный излучатель 19 посылает сигнал, а, оптический приемник лазерного сигнала 20 получает отраженный сигнал от поверхности конструкции 13 и передает полученную информацию в электронное устройство для вычисления расстояния до объекта 21, где она обрабатывается и поступает в АПК 22. На основании полученной информации, АПК 22 рассчитывает параметры геометрии рельсового пути и положение конструкций в пространстве относительно рельсового пути 4, сопоставленные с пикетажем, а именно: положение пути в плане и по уровню, а также взаимное расположение конструкций, вынесенных за пределы рельсового пути, в пространстве относительно рельсового пути 4. АПК 22 вычисляет необходимые перемещения пути для реализации проекта на основании сравнения проектных данных с рассчитанными параметрами и положением рельсового пути 4 относительно конструкций 13. Результаты записываются в память АПК 22, обрабатываются с предварительно загруженным проектом пути, осуществляющем алгоритмическую обработку информации в виде, удобном для дальнейшего использования, например, в экранно-графическом представлении с указанием параметров геометрии рельсового пути, в стрелах изгиба, в том числе перемещениях пути для реализации проекта.
Таким образом, заявленный способ обеспечивает более точное определение положения железнодорожного пути в плане за счет дополнительной измерительной базы, следовательно, и более точный расчет перемещений железнодорожного пути для постановки в проектное положение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИИ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2256575C1 |
| СПОСОБ ПРОВЕДЕНИЯ РЕМОНТОВ И РЕКОНСТРУКЦИИ ЖЕЛЕЗНОДОРОЖНОЙ ИНФРАСТРУКТУРЫ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОЙ МОДЕЛИ ПУТИ | 2011 |
|
RU2465385C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2009 |
|
RU2387561C1 |
| УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2013 |
|
RU2551637C2 |
| Система и способ для определения пространственного положения и выправки железнодорожного пути, устройство лазерного измерения системы сбора данных о фактическом положении пути | 2023 |
|
RU2808852C1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА ДЛЯ ВЫПРАВКИ И КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2443826C2 |
| Способ выправки железнодорожного пути и устройство для его осуществления | 2023 |
|
RU2824765C1 |
| СПОСОБ ТЕКУЩЕГО СОДЕРЖАНИЯ ИНФРАСТРУКТУРЫ ЖЕЛЕЗНЫХ ДОРОГ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОЙ МОДЕЛИ ПУТИ | 2011 |
|
RU2466235C2 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2014 |
|
RU2565429C1 |
| Способ определения пространственных координат и геометрических параметров рельсового пути и устройство для его осуществления | 2016 |
|
RU2628541C1 |
Изобретение относится к контрольно-измерительной технике и может быть использовано для контроля железнодорожного пути, в частности для определения отклонения железнодорожного пути от проектного положения. Система для определения пространственного положения железнодорожного пути включает кинематически связанные измерительные тележки (1, 2, 3), на первой из которых (по ходу движения) установлены датчик уровня (10) и датчик пройденного пути (11), на второй тележке установлен датчик измерения стрелы изгиба (7), подсоединенные к программно-аппаратному комплексу алгоритмической обработки совокупной информации (22). Система также снабжена устройством измерения пространственного положения пути в плане (12), подсоединенным к программно-аппаратному комплексу и состоящим из светодиодного маркера наведения (18), лазерного излучателя (19), оптического приемника лазерного сигнала (20), которые подключены к электронному устройству для вычисления расстояния до объекта (21). В результате повышается точность определения пространственного положения железнодорожного пути. 2 з.п. ф-лы, 2 ил.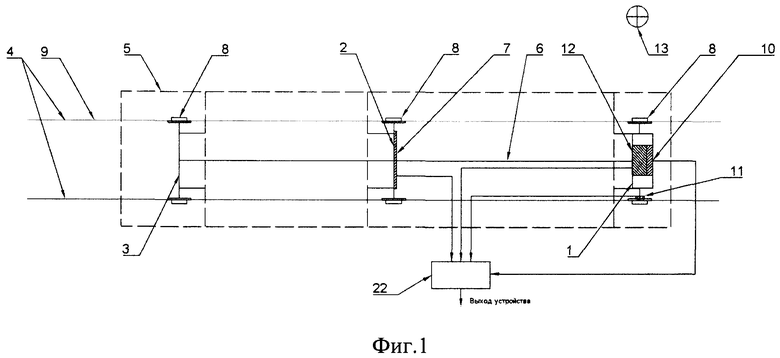
1. Система для определения пространственного положения железнодорожного пути, включающая кинематически связанные измерительные тележки, на первой из которых (по ходу движения) установлен датчик уровня и датчик пройденного пути, на второй тележке установлен датчик измерения стрелы изгиба, подключенные к приемно-анализирующей системе, соединенной с программно-аппаратным комплексом алгоритмической обработки совокупной информации, отличающаяся тем, что она снабжена закрепленным на первой по ходу движения измерительной тележке блоком для измерения пространственного положения пути в плане относительно измерительной базы, в качестве которой использованы конструкции, вынесенные за пределы рельсового пути и расположенные по ходу ее движения с известными пространственными координатами относительно железнодорожного пути, подсоединенным к программно-аппаратному комплексу.
2. Система для определения пространственного положения железнодорожного пути по п. 1, отличающаяся тем, что устройство для измерения пространственного положения пути в плане выполнено в виде размещенных в корпусе светодиодного маркера наведения, лазерного излучателя, оптического приемника лазерного сигнала, подключенных к электронному устройству для вычисления расстояния до объекта.
3. Система для определения пространственного положения железнодорожного пути по п. 1 или 2, отличающаяся тем, что устройство для измерения пространственного положения пути в плане установлено с возможностью поворота в вертикальной плоскости посредством сервопривода, подключенного к электронному устройству для вычисления расстояния до объекта.
| US 5331745 A, 26.07.1994 | |||
| СПОСОБ КОНТРОЛЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2014 |
|
RU2556740C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИИ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2256575C1 |
| CN 202345716 U, 25.07.2012. | |||

