ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Изобретение относится к системе идентификации (ID) транспортного средства и к устройству идентификации транспортного средства.
УРОВЕНЬ ТЕХНИКИ
[0002] К настоящему времени доступна, например, система идентификации транспортного средства, которая идентифицирует другое транспортное средство, которое осуществляет связь, чтобы управлять основным транспортным средством. В качестве такой системы идентификации традиционного транспортного средства, например, патентный документ 1 раскрывает устройство идентификации транспортного средства, включающее в себя бортовое средство обнаружения для обнаружения другого транспортного средства, смонтированное на основном транспортном средстве, средство получения связи для получения информации, относящейся к другому транспортному средству, посредством связи, и средство идентификации для идентификации другого транспортного средства, обнаруженного посредством бортового средства обнаружения, при этом информация по другому транспортному средству получается посредством средства получения связи.
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер 2010-086269
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Устройство идентификации транспортного средства, описанное в вышеупомянутом патентном документе 1, идентифицирует другое транспортное средство на основе степени совпадения между скоростью, которая определяется, и скоростью, которая указывается посредством полученной начальной информации, степени совпадения между размером обнаруженного другого транспортного средства и размером, соответствующим модели транспортного средства, указываемой посредством полученной информации модели транспортного средства, степени совпадения между позицией, в которой обнаруживается другое транспортное средство, и позицией, указываемой посредством полученной информации позиции и т.п. Тем не менее, имеются возможности для дополнительного улучшения, например, в отношении повышении точности во время идентификации поддерживающего связь транспортного средства.
[0005] Изобретение осуществлено с учетом вышеупомянутых обстоятельств и задача изобретения заключается в том, чтобы предоставлять систему идентификации транспортного средства, допускающую повышение точности идентификации поддерживающего связь транспортного средства.
[0006] Чтобы решать вышеупомянутую задачу, система идентификации транспортного средства согласно изобретению включает в себя: устройство связи, которое принимает информацию другого транспортного средства, связанную с другим транспортным средством, около основного транспортного средства; устройство обнаружения, которое обнаруживает другое транспортное средство около основного транспортного средства; и устройство идентификации транспортного средства, которое идентифицирует передающее транспортное средство, передающее информацию другого транспортного средства, на основе информации другого транспортного средства, принимаемой посредством устройства связи, и результата обнаружения посредством устройства обнаружения, при этом устройство идентификации транспортного средства выполнено с возможностью переключения между режимом захвата для захвата передающего транспортного средства на основе информации другого транспортного средства, принимаемой посредством устройства связи, и результата обнаружения посредством устройства обнаружения, и режимом отслеживания для идентификации передающего транспортного средства на основе позиционной взаимосвязи между основным транспортным средством и передающим транспортным средством во время захвата в режиме захвата и информации движения, связанной с передающим транспортным средством на основе информации другого транспортного средства, принимаемой посредством устройства связи, после захвата в режиме захвата.
[0007] В вышеупомянутой системе идентификации транспортного средства, устройство идентификации транспортного средства может захватывать передающее транспортное средство на основе информации абсолютной позиции, которая является информацией позиции, связанной с передающим транспортным средством на основе информации другого транспортного средства в режиме захвата, и идентифицировать, в режиме отслеживания, передающее транспортное средство на основе информации относительной позиции, которая является информацией позиции, связанной с передающим транспортным средством на основе опорной позиции, которая является позицией передающего транспортного средства во время захвата в режиме захвата, и информации движения, связанной с передающим транспортным средством.
[0008] В вышеупомянутой системе идентификации транспортного средства, устройство идентификации транспортного средства может идентифицировать, в режиме отслеживания, передающее транспортное средство на основе информации относительной позиции, на основе информации относительной позиции, связанной с прошлым в режиме отслеживания, и информации движения, связанной с передающим транспортным средством.
[0009] В вышеупомянутой системе идентификации транспортного средства, устройство идентификации транспортного средства может возвращаться, в режиме отслеживания, в режим захвата в соответствии с результатом сравнения между информацией движения, связанной с передающим транспортным средством на основе информации другого транспортного средства, принимаемой посредством устройства связи, и результатом обнаружения посредством устройства обнаружения.
[0010] Вышеупомянутая система идентификации транспортного средства дополнительно может включать в себя устройство управления движением, которое управляет замедлением основного транспортного средства на основе замедления другого транспортного средства, обнаруженного посредством устройства обнаружения, во время возвращения из режима отслеживания в режим захвата в соответствии с результатом сравнения.
[0011] Чтобы решать вышеупомянутую задачу, устройство идентификации транспортного средства согласно изобретению выполнено с возможностью переключения между режимом захвата для захвата передающего транспортного средства с информацией другого транспортного средства, связанной с другим транспортным средством около основного транспортного средства, принимаемой посредством устройства связи, на основе информации другого транспортного средства и результата обнаружения посредством устройства обнаружения, которое обнаруживает другое транспортное средство около основного транспортного средства, и режимом отслеживания для идентификации передающего транспортного средства на основе позиционной взаимосвязи между основным транспортным средством и передающим транспортным средством во время захвата в режиме захвата и информации движения, связанной с передающим транспортным средством на основе информации другого транспортного средства, принимаемой посредством устройства связи, после захвата в режиме захвата.
[0012] Система идентификации транспортного средства и устройство идентификации транспортного средства согласно изобретению обеспечивают такие преимущества, что может повышаться точность идентификации поддерживающего связь транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0013] Фиг. 1 является принципиальной схемой конфигурации, представляющей систему управления транспортного средства согласно варианту 1 осуществления.
Фиг. 2 является принципиальной схемой, иллюстрирующей взаимосвязь между основным транспортным средством и другим транспортным средством в системе управления транспортного средства согласно варианту 1 осуществления.
Фиг. 3 является принципиальной схемой, иллюстрирующей внутреннее состояние электронного модуля управления (ECU) транспортного средства согласно варианту 1 осуществления.
Фиг. 4 является принципиальной схемой конфигурации, представляющей модуль режима отслеживания ECU управления транспортного средства согласно варианту 1 осуществления.
Фиг. 5 является принципиальной схемой, иллюстрирующей определение отслеживания в режиме отслеживания в ECU управления транспортного средства согласно варианту 1 осуществления.
Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей пример процесса определения отслеживания в режиме отслеживания в ECU управления транспортного средства согласно варианту 1 осуществления.
Фиг. 7 является схематическим графиком, иллюстрирующим работу системы управления транспортного средства согласно варианту 1 осуществления.
Фиг. 8 является принципиальной схемой, иллюстрирующей работу системы управления транспортного средства согласно варианту 1 осуществления.
Фиг. 9 является принципиальной схемой конфигурации, представляющей систему управления транспортного средства согласно варианту 2 осуществления.
Фиг. 10 является принципиальной схемой, иллюстрирующей некорректное распознавание поддерживающего связь транспортного средства.
Фиг. 11 является принципиальной схемой, иллюстрирующей внутреннее состояние ECU управления транспортного средства согласно варианту 2 осуществления.
Фиг. 12 является принципиальной схемой конфигурации, представляющей модуль определения некорректного распознавания ECU управления транспортного средства согласно варианту 2 осуществления.
Фиг. 13 является блок-схемой последовательности операций способа, иллюстрирующей пример управления определением некорректного распознавания ECU управления транспортного средства согласно варианту 2 осуществления.
ОПТИМАЛЬНЫЕ РЕЖИМЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0014] В дальнейшем в этом документе подробно описываются варианты осуществления согласно изобретению со ссылкой на чертежи. Следует отметить, что это изобретение не ограничено этими вариантами осуществления. Дополнительно, компоненты в следующих вариантах осуществления включают в себя компоненты, легко заменяемые специалистами в данной области техники, или практически идентичные компоненты.
[0015] ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Фиг. 1 является принципиальной схемой конфигурации, представляющей систему управления транспортного средства согласно варианту 1 осуществления, фиг. 2 является принципиальной схемой, иллюстрирующей взаимосвязь между основным транспортным средством и другим транспортным средством в системе управления транспортного средства согласно варианту 1 осуществления, фиг. 3 является принципиальной схемой, иллюстрирующей внутреннее состояние ECU управления транспортного средства согласно варианту 1 осуществления, фиг. 4 является принципиальной схемой конфигурации, представляющей модуль режима отслеживания ECU управления транспортного средства согласно варианту 1 осуществления, фиг. 5 является принципиальной схемой, иллюстрирующей определение отслеживания в режиме отслеживания в ECU управления транспортного средства согласно варианту 1 осуществления, фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей пример процесса определения отслеживания в режиме отслеживания в ECU управления транспортного средства согласно варианту 1 осуществления, фиг. 7 является схемой, иллюстрирующей работу системы управления транспортного средства согласно варианту 1 осуществления, фиг. 8 является принципиальной схемой, иллюстрирующей работу системы управления транспортного средства согласно варианту 1 осуществления.
[0016] Система 1 управления транспортного средства, служащая в качестве системы идентификации транспортного средства согласно этому варианту осуществления, показанная на фиг. 1, применяется к адаптивной системе оптимального регулирования скорости (ACC) (система круиз-контроля), которая управляет расстоянием между транспортными средствами таким образом, что расстояние между транспортными средствами становится целевым расстоянием между транспортными средствами (или целевым временем между транспортными средствами), заданным посредством использования радиосвязи, к примеру, так называемой связи между транспортными средствами. Компоненты, показанные на фиг. 1, монтируются на транспортном средстве, тем самым реализуя систему 1 управления транспортного средства.
[0017] Как показано на фиг. 2, система 1 управления транспортного средства передает/принимает различную информацию между основным транспортным средством C1 и другим транспортным средством C2 (например, движущимся впереди транспортным средством или движущимся сзади транспортным средством), которое движется около основного транспортного средства C1, посредством использования технологии радиосвязи для транспортного средства. Затем система 1 управления транспортного средства обеспечивает управление движением между основным транспортным средством C1 и другим транспортным средством C2 с использованием информации, связанной с этими транспортными средствами, которая передается/принимается. Система 1 управления транспортного средства задает целевые значения управления, к примеру, целевое расстояние между транспортными средствами и т.п., на основе необходимой информации следящего управления в различной информации, полученной из другого транспортного средства C2, в основном транспортном средстве C1, чтобы выполнять управление транспортным средством согласно целевым значениям управления. Иными словами, система 1 управления транспортного средства выполняет следящее управление на основе обмена информацией на основе информации (передаваемых данных) другого транспортного средства C2, которая принимается по радиосвязи. Система 1 управления транспортного средства сокращает расстояние D между транспортными средствами, конкретно, между основным транспортным средством C1 и другим транспортным средством C2, так что расстояние D между транспортными средствами становится целевым расстоянием между транспортными средствами, в силу этого, например, обеспечивая уменьшение сопротивления воздуха движущегося сзади транспортного средства. Следовательно, можно снижать расход топлива движущегося сзади транспортного средства. Дополнительно, система 1 управления транспортного средства сокращает расстояние между транспортными средствами, в силу этого, например, обеспечивая увеличение числа пропускаемых транспортных средств (так называемой пропускной способности дороги) в единицу времени в определенной точке на дороге. Следовательно, она является полезной для уменьшения дорожных пробок.
[0018] Следящее управление (управление между транспортными средствами) системы 1 управления транспортного средства, проиллюстрированной в данном документе, не ограничивается следящим управлением между двумя транспортными средствами, выполняемым когда транспортное средство движется следом за другим движущимся впереди транспортным средством впереди транспортного средства или когда после транспортного средства движется другое движущееся сзади транспортное средство. Следящее управление системы 1 управления транспортного средства включает в себя следящее управление между транспортными средствами, выполняемое, когда множество транспортных средств образуют группу линии транспортных средств (группу транспортных средств), которые едут в одну линию следом за движущимся впереди транспортным средством или преследуются движущимся сзади транспортным средством.
[0019] В частности, как проиллюстрировано на фиг. 1, система 1 управления транспортного средства включает в себя ECU 10 управления транспортного средства, который используется в качестве устройства идентификации транспортного средства и устройства управления движением, передний датчик 21a расстояния между транспортными средствами и ECU 21 переднего датчика, которые служат в качестве устройства обнаружения, датчик 22a скорости и ECU 22 датчика скорости, датчик 23a ускорения и ECU 23 датчика ускорения, радиоантенну 24a и ECU 24 управления радиоантенны, которые служат в качестве устройства связи, ECU 31 управления двигателем, ECU 32 управления тормозом и ECU 33 управления при рулении. Компоненты системы 1 управления транспортного средства иллюстрируются как смонтированные совместно на основном транспортном средстве и другом транспортном средстве около этого основного транспортного средства.
[0020] ECU 10 управления транспортного средства является модулем управления, который полностью управляет всей системой 1 управления транспортного средства, и, например, конфигурируется, главным образом, в виде компьютера, включающего в себя центральный процессор (CPU), постоянное запоминающее устройство (ROM) и оперативное запоминающее устройство (RAM). ECU 10 управления транспортного средства является устройством управления движением, которое управляет движением основного транспортного средства и выполняет вышеупомянутое следящее управление на основе обмена информацией. Ниже описываются подробные функции ECU 10 управления транспортного средства.
[0021] Передний датчик 21a расстояния между транспортными средствами, датчик 22a скорости, датчик 23a ускорения и т.п. является автономными датчиками (бортовым оборудованием) для обнаружения состояния движения основного транспортного средства, т.е. транспортного средства с установленной системой 1 управления транспортного средства. Передний датчик 21a расстояния между транспортными средствами электрически подключен к ECU 21 переднего датчика. Датчик 22a скорости электрически подключен к ECU 22 датчика скорости. Датчик 23a ускорения электрически подключен к ECU 23 датчика ускорения. ECU 21 переднего датчика, ECU 22 датчика скорости и ECU 23 датчика ускорения обрабатывают сигнал, полученный посредством соответствующего датчика. ECU 21 переднего датчика, ECU 22 датчика скорости и ECU 23 датчика ускорения подключаются к ECU 10 управления транспортного средства через CAN 20 связи/системы датчиков, сконструированную в качестве бортовой сети.
[0022] Передний датчик 21a расстояния между транспортными средствами и ECU 21 переднего датчика являются устройством обнаружения для обнаружения другого транспортного средства около основного транспортного средства и обнаруживают относительную физическую величину, которая указывает относительную взаимосвязь между обнаруженным другим транспортным средством и основным транспортным средством. Типично, передний датчик 21a расстояния между транспортными средствами и ECU 21 переднего датчика обнаруживают другое транспортное средство, которое движется впереди основного транспортного средства (в дальнейшем в этом документе, иногда называемое «движущимся впереди транспортным средством»). Передний датчик 21a расстояния между транспортными средствами и ECU 21 переднего датчика обнаруживают движущееся впереди транспортное средство в пределах предварительно определенной дальности R обнаружения (например, см. фиг. 2) впереди основного транспортного средства, в типичном варианте, движущееся впереди транспортное средство, которое движется непосредственно впереди основного транспортного средства. В данном документе, передний датчик 21a расстояния между транспортными средствами и ECU 21 переднего датчика имеют функцию обнаружения расстояния между транспортными средствами, конкретно, между основным транспортным средством и другим транспортным средством, которое движется непосредственно впереди основного транспортного средства, в качестве вышеупомянутой относительной физической величины. Это расстояние между транспортными средствами, конкретно, между основным транспортным средством и другим транспортным средством, которое движется непосредственно впереди основного транспортного средства, соответствует физической величине, которая указывает относительную позицию другого транспортного средства по отношению к основному транспортному средству (в дальнейшем в этом документе, иногда называемую «относительной позицией»). Помимо этого, информация, которая указывает расстояние между транспортными средствами, конкретно, между основным транспортным средством и другим транспортным средством, соответствует информации позиции, которая указывает позицию другого транспортного средства по отношению к основному транспортному средству.
[0023] Для переднего датчика 21a расстояния между транспортными средствами, например, может использоваться радар диапазона миллиметровых волн и т.п., предоставленный в передней части основного транспортного средства. Например, передний датчик 21a расстояния между транспортными средствами выполняет передачу таким образом, чтобы выполнять сканирование в направлении вправо и влево (в направлении ширины транспортного средства) с помощью электромагнитных волн, таких как миллиметровые волны, и принимает отраженные волны, отраженные от объекта. ECU 21 переднего датчика вычисляет расстояние между транспортными средствами в качестве вышеупомянутой относительной физической величины на основе времени, в течение которого передний датчик 21a расстояния между транспортными средствами передает электромагнитные волны и принимает электромагнитные волны. Дополнительно, ECU 21 переднего датчика может вычислять относительную скорость, относительное ускорение и т.п. основного транспортного средства в сравнении с другим транспортным средством, которое движется непосредственно впереди по ходу движения основного транспортного средства, в качестве вышеупомянутой относительной физической величины на основе времени, в течение которого передний датчик 21a расстояния между транспортными средствами передает электромагнитные волны и принимает электромагнитные волны, или расстояния между транспортными средствами и т.п., вычисленного из времени. ECU 21 переднего датчика выводит относительные физические величины, такие как вычисленное расстояние между транспортными средствами, относительная скорость и относительное ускорение, в ECU 10 управления транспортного средства в качестве информации обнаружения другого транспортного средства. Расстояние между транспортными средствами, относительная скорость, относительное ускорение и т.п., обнаруженные посредством переднего датчика 21a расстояния между транспортными средствами и ECU 21 переднего датчика, включают в себя ошибки шума, точности выполнения операций, точности измерения и т.п.
[0024] В данном документе, для переднего датчика 21a расстояния между транспортными средствами может использоваться радар диапазона миллиметровых волн и т.п. Тем не менее, передний датчик 21a расстояния между транспортными средствами не ограничивается этим. Передний датчик 21a расстояния между транспортными средствами может быть, например, радаром, использующим лазеры, инфракрасные лучи и т.п., радаром для коротких расстояний, к примеру, сверхширокополосным (UWB) радаром, акустическим локатором, использующим звуковые волны в звуковом диапазоне или ультразвуковые волны, либо устройством распознавания изображений, которое вычисляет расстояние между транспортными средствами и т.п. посредством анализа данных изображений, полученных посредством фотографирования пространства перед основным транспортным средством в направлении движения посредством устройства формирования изображений, такого как камера на основе прибора с зарядовой связью (CCD) и т.п. Система 1 управления транспортного средства дополнительно может включать в себя задний датчик расстояния между транспортными средствами и ECU заднего датчика, которые обнаруживают относительную физическую величину, указывающую относительную взаимосвязь между движущимся сзади транспортным средством относительно основного транспортного средства и основным транспортным средством, в качестве устройства обнаружения, которое обнаруживает другое транспортное средство около основного транспортного средства.
[0025] Датчик 22a скорости и ECU 22 датчика скорости имеют функцию обнаружения скорости основного транспортного средства (в дальнейшем в этом документе, иногда называемой «скоростью транспортного средства»). Для датчика 22a скорости может быть использован, например, датчик скорости вращения колес с электромагнитным преобразователем, который обнаруживает вращение колес основного транспортного средства в качестве импульсного сигнала и т.п. Например, датчик 22a скорости выводит импульсный сигнал, сопутствующий вращению колес, в ECU 22 датчика скорости. ECU 22 датчика скорости вычисляет скорость основного транспортного средства (или скорость вращения колес) на основе импульсного сигнала, обнаруженного посредством датчика 22a скорости. ECU 22 датчика скорости выводит скорость основного транспортного средства в ECU 10 управления транспортного средства в качестве информации скорости. Скорость основного транспортного средства, обнаруженная посредством датчика 22a скорости и ECU 22 датчика скорости, включает в себя ошибки шума, точности выполнения операций, точности измерения и т.п.
[0026] Датчик 23a ускорения и ECU 23 датчика ускорения имеют функцию обнаружения ускорения основного транспортного средства. Для датчика 23a ускорения может быть использован, например, датчик скорости газа, гиродатчик и т.п. Например, датчик 23a ускорения выводит сигнал, указывающий смещение, возникающее в результате ускорения, в ECU 23 датчика ускорения. ECU 23 датчика ускорения вычисляет ускорение основного транспортного средства на основе сигнала. ECU 23 датчика ускорения выводит ускорение в ECU 10 управления транспортного средства в качестве информации ускорения. Ускорение, обнаруженное посредством датчика 23a ускорения и ECU 23 датчика ускорения, включает в себя ошибки шума, точности выполнения операций, точности измерения и т.п.
[0027] Как описано выше, система 1 управления транспортного средства выполнена с возможностью получения информации обнаружения другого транспортного средства, информации скорости и информации ускорения относительно основного транспортного средства в качестве результатов обнаружения посредством вышеупомянутых различных автономных датчиков, смонтированных на основном транспортном средстве.
[0028] ECU 31 управления двигателем, ECU 32 управления тормозом и ECU 33 управления при рулении выполняют процесс, связанный с такой операцией, как ускорение/замедление, руление и т.п. основного транспортного средства. ECU 31 управления двигателем, ECU 32 управления тормозом и ECU 33 управления при рулении подключаются к ECU 10 управления транспортного средства через CAN 30 системы управления в качестве бортовой сети.
[0029] ECU 31 управления двигателем имеет функцию ввода информации значения запроса на ускорение, выводимой из ECU 10 управления транспортного средства, и управления приводом дросселя и т.п. с помощью регулируемой переменной, соответствующей значению запроса на ускорение, указывающему информацию значения запроса на ускорение. ECU 32 управления тормозом имеет функцию ввода вышеупомянутой информации значения запроса на ускорение и управления приводом тормоза и т.п. с помощью регулируемой переменной, соответствующей значению запроса на ускорение, указывающему информацию значения запроса на ускорение. ECU 33 управления при рулении имеет функцию ввода информации значений команд управления при рулении, выводимой из ECU 10 управления транспортного средства, и управления приводом рулевого управления и т.п. с помощью регулируемой переменной, соответствующей значению команды управления при рулении, указывающему информацию значения команды управления при рулении. Ниже описываются информация значения запроса на ускорение и информация значения команды управления при рулении, выводимые из ECU 10 управления транспортного средства.
[0030] Радиоантенна 24a и ECU 24 управления радиоантенны представляют собой устройство связи, которое принимает информацию связи другого транспортного средства в качестве информации другого транспортного средства, связанной с другим транспортным средством около основного транспортного средства, и переносит различную информацию между основным транспортным средством и другим транспортным средством около основного транспортного средства. ECU 24 управления радиоантенны подключается к ECU 10 управления транспортного средства через CAN 20 связи/системы датчиков.
[0031] Для радиоантенны 24a и ECU 24 управления радиоантенны может быть использовано, например, устройство связи между транспортными средствами, которое осуществляет радиосвязь для транспортного средства. Система 1 управления транспортного средства для основного транспортного средства взаимно осуществляет связь между транспортными средствами с другим транспортным средством около основного транспортного средства посредством радиоантенны 24a и ECU 24 управления радиоантенны. Следовательно, система 1 управления транспортного средства выполнена с возможностью взаимного переноса различной информации, к примеру, информации указания транспортного средства, связанной с соответствующими транспортными средствами, информации обнаружения другого транспортного средства, информации скорости, информации ускорения, информации идентификации транспортного средства (информации идентификации кузова), информации значения запроса на ускорение, информации значения команды управления при рулении и информации окружающей обстановки при движении в качестве информации связи другого транспортного средства.
[0032] Дополнительно, радиоантенна 24a и ECU 24 управления радиоантенны также имеют функцию в качестве глобальной системы позиционирования (GPS), которая обнаруживает текущую позицию основного транспортного средства. Радиоантенна 24a и ECU 24 управления радиоантенны принимают GPS-сигнал, выводимый посредством GPS-спутника, чтобы позиционировать и рассчитывать GPS-информацию (широту, долготу и направление движения), которая является информацией позиции, связанной с основным транспортным средством, на основе принимаемого GPS-сигнала. Система 1 управления транспортного средства для основного транспортного средства взаимно осуществляет связь между транспортными средствами с другим транспортным средством около основного транспортного средства посредством радиоантенны 24a и ECU 24 управления радиоантенны, и GPS-информация также может взаимно переноситься в качестве информации связи другого транспортного средства. В качестве факторов ошибки GPS-позиции возможно влияние ионосферы, влияние испарения, влияние давления воздуха, влияние местоположения спутника, влияние линии электропередач высокого напряжения, влияние грома, разветвление дорог и т.п. Ошибка позиционирования посредством GPS зачастую становится относительно большей, например, в такой окружающей обстановке, как городской район, в которой часто встречаются разветвления дорог или туннели, которые блокируют радиоволны GPS.
[0033] В данном документе, устройство связи между транспортными средствами и т.п. используется для радиоантенны 24a и ECU 24 управления радиоантенны. Тем не менее, радиоантенна 24a и ECU 24 управления радиоантенны не ограничены этим. Радиоантенна 24a и ECU 24 управления радиоантенны могут представлять собой устройство связи между транспортным средством и дорожной инфраструктурой, которое дает возможность транспортным средствам обмениваться информацией через средство связи (придорожную установку, к примеру, оптический маяк), сконструированное за пределами транспортного средства. Дополнительно, радиоантенна 24a и ECU 24 управления радиоантенны могут представлять собой устройство, которое дает возможность транспортным средствам обмениваться информацией посредством использования инфраструктуры связи, такой как Интернет, через средство связи (базовую станцию, к примеру, информационный центр), сконструированное за пределами транспортного средства. GPS-устройство может быть сконфигурировано независимо от радиоантенны 24a и ECU 24 управления радиоантенны, например, аналогично так называемому навигационному устройству.
[0034] ECU 10 управления транспортного средства имеет функцию автономного управления расстоянием между транспортными средствами, конкретно, между основным транспортным средством и другим транспортным средством на основе информации скорости, связанной с основным транспортным средством, информации ускорения, связанной с основным транспортным средством, и информации обнаружения другого транспортного средства (расстояния между транспортными средствами, конкретно, между основным транспортным средством и другим транспортным средством, относительной скорости, относительного ускорения и т.п.), которые получаются посредством вышеупомянутых различных автономных датчиков основного транспортного средства, и информации связи (передаваемых данных) другого транспортного средства, полученной посредством связи через радиоантенну 24a и ECU 24 управления радиоантенны. Например, ECU 10 управления транспортного средства имеет функцию формирования информации значения запроса на ускорение, информации значения команды управления при рулении и т.п. на основе вышеупомянутой различной информации, связанной с основным транспортным средством и другим транспортным средством, так что расстояние между транспортными средствами (время между транспортными средствами) становится целевым расстоянием между транспортными средствами (целевым временем между транспортными средствами).
[0035] Это целевое расстояние между транспортными средствами задается посредством ECU 10 управления транспортного средства на основе оцененного значения расстояния между транспортными средствами с учетом рабочих характеристик каждого транспортного средства и окружающей обстановки при движении. ECU 10 управления транспортного средства задает целевое расстояние между транспортными средствами на основе текущей относительной скорости, текущего относительного расстояния между транспортными средствами и текущего относительного ускорения транспортного средства между транспортными средствами таким образом, что расстояние между транспортными средствами не становится нулем, например, даже когда движущееся впереди транспортное средство, которое движется непосредственно впереди основного транспортного средства, выполняет внезапное торможение и т.п. Затем, ECU 10 управления транспортного средства, например, задает целевую скорость транспортного средства, целевое ускорение транспортного средства (целевое замедление транспортного средства), целевой рывок и т.п. в качестве фактических целевых значений управления для основного транспортного средства, которые обеспечивают реализацию целевого расстояния между транспортными средствами, на основе целевого расстояния между транспортными средствами, и формирует информацию значения запроса на ускорение и информацию значения команды управления при рулении и т.п. в соответствии с целевой скоростью транспортного средства, целевым ускорением транспортного средства (целевым замедлением транспортного средства), целевым рывком и т.п.
[0036] Затем, ECU 10 управления транспортного средства полностью управляет соответствующими модулями основного транспортного средства на основе информации значения запроса на ускорение, информации значения команды управления при рулении (т.е. целевой скорости транспортного средства, целевого ускорения транспортного средства (целевого замедления транспортного средства), целевого рывка и т.п.) таким образом, что расстояние между транспортными средствами сводится к целевому расстоянию между транспортными средствами. Следовательно, ECU 10 управления транспортного средства выполняет следящее управление на основе обмена информацией с использованием функции связи.
[0037] Как результат, система 1 управления транспортного средства может предписывать основному транспортному средству следить за движущимся впереди транспортным средством, которое движется непосредственно впереди основного транспортного средства, поддерживать расстояние между транспортными средствами, конкретно, между основным транспортным средством и движущимся впереди транспортным средством равным надлежащему расстоянию между транспортными средствами, в силу этого приводя, например, к улучшению расхода топлива или уменьшению дорожных пробок.
[0038] В данном документе, система 1 управления транспортного средства этого варианта осуществления также является системой для непрерывной идентификации поддерживающего связь транспортного средства (передающего транспортного средства для информации связи другого транспортного средства), представляющего собой другое транспортное средство, которое поддерживает связь с основным транспортным средством, на основе информации обнаружения другого транспортного средства и информации связи другого транспортного средства, в ходе следящего управления на основе обмена информацией. Система 1 управления транспортного средства по существу надежно распознает, что движущееся впереди транспортное средство, которое движется непосредственно впереди основного транспортного средства, является целевым транспортным средством для следящего управления, т.е. надежно распознает, что движущееся впереди транспортное средство, которое движется непосредственно впереди основного транспортного средства, является поддерживающим связь транспортным средством, которое поддерживает связь с основным транспортным средством, и после этого выполняет следящее управление таким образом, что основное транспортное средство следит за поддерживающим связь транспортным средством. Когда система 1 управления транспортного средства выполняет следящее управление, сосуществует множество транспортных средств, которые не поддерживают связь с основным транспортным средством, и, следовательно, система 1 управления транспортного средства подтверждает то, является или нет движущееся впереди транспортное средство, обнаруженное посредством переднего датчика 21a расстояния между транспортными средствами и т.п., фактически поддерживающим связь транспортным средством, которое осуществляет радиосвязь с основным транспортным средством, чтобы идентифицировать движущееся впереди транспортное средство.
[0039] ECU 10 управления транспортного средства также выступает в качестве устройства идентификации транспортного средства, которое идентифицирует поддерживающее связь транспортное средство, которое является передающим транспортным средством для информации связи другого транспортного средства, на основе информации связи другого транспортного средства, принимаемой посредством радиоантенны 24a и ECU 24 управления радиоантенны, и информации обнаружения другого транспортного средства, которая является результатом обнаружения посредством переднего датчика 21a расстояния между транспортными средствами и ECU 21 переднего датчика.
[0040] Как показано на фиг. 3, ECU 10 управления транспортного средства этого варианта осуществления имеет режим захвата и режим отслеживания в качестве режимов для идентификации поддерживающего связь транспортного средства и выполнено с возможностью автоматического переключения этих режимов в соответствии с ситуацией, за счет этого повышая точность идентификации поддерживающего связь транспортного средства. Иными словами, ECU 10 управления транспортного средства имеет два внутренних состояния: режим захвата и режим отслеживания, при идентификации поддерживающего связь транспортного средства. Типично, ECU 10 управления транспортного средства идентифицирует поддерживающее связь транспортное средство посредством использования информации движения, связанной с другим транспортным средством, которая получается посредством связи, во время режима отслеживания, за счет этого повышая устойчивость к окружающей обстановке, чтобы обеспечивать так называемую устойчивость. Например, ECU 10 управления транспортного средства находится в режиме захвата в состоянии, в котором движущееся впереди поддерживающее связь транспортное средство, представляющее собой движущееся впереди транспортное средство, которое поддерживает связь с основным транспортным средством, отсутствует, и при захвате движущегося впереди поддерживающего связь транспортного средства в режиме захвата во время начального захвата и т.п. ECU 10 управления транспортного средства переходит в режим отслеживания. Дополнительно, в режиме отслеживания, когда движущееся впереди транспортное средство, которое движется непосредственно впереди основного транспортного средства, изменяется посредством нарушения или отклонения от линии транспортного средства, ECU 10 управления транспортного средства снова переходит в режим захвата. Иными словами, ECU 10 управления транспортного средства переключает процесс идентификации поддерживающего связь транспортного средства между тем, когда ECU 10 управления транспортного средства первоначально находит движущееся впереди поддерживающее связь транспортное средство, и когда ECU 10 управления транспортного средства после этого продолжает следить за захваченным движущимся впереди поддерживающим связь транспортным средством.
[0041] В частности, как проиллюстрировано на фиг. 1, в функционально концептуальном отношении, ECU 10 управления транспортного средства содержит модуль 11 идентификации транспортного средства и модуль 12 управления движением. Модуль 11 идентификации транспортного средства идентифицирует поддерживающее связь транспортное средство (передающее транспортное средство) на основе информации связи другого транспортного средства и информации обнаружения другого транспортного средства и включает в себя модуль 13 режима захвата и модуль 14 режима отслеживания. Модуль 12 управления движением выполняет следящее управление на основе обмена информацией таким образом, чтобы предписывать основному транспортному средству следить за поддерживающим связь транспортным средством, идентифицированным посредством модуля 11 идентификации транспортного средства.
[0042] Модуль 13 режима захвата реализует режим захвата. Модуль 13 режима захвата захватывает передающее транспортное средство на основе информации связи другого транспортного средства, принимаемой посредством радиоантенны 24a и ECU 24 управления радиоантенны, и информации обнаружения другого транспортного средства, которая является результатом обнаружения посредством переднего датчика 21a расстояния между транспортными средствами и ECU 21 переднего датчика, в качестве режима захвата. Модуль 13 режима захвата получает информацию обнаружения другого транспортного средства, информацию связи другого транспортного средства и т.п. из ECU 21 переднего датчика, ECU 24 управления радиоантенны и т.п. через CAN 20 связи/системы датчиков. Модуль 13 режима захвата просто захватывает (движущееся впереди) поддерживающее связь транспортное средство, которое движется впереди основного транспортного средства, на основе информации связи другого транспортного средства и информации обнаружения другого транспортного средства, посредством использования различных способов.
[0043] Модуль 13 режима захвата этого варианта осуществления захватывает поддерживающее связь транспортное средство на основе информации абсолютной позиции, на основе информации связи другого транспортного средства. В данном документе, информация абсолютной позиции является информацией позиции для другого транспортного средства на основе информации связи другого транспортного средства. Типично, информация абсолютной позиции является информацией позиции, указывающей абсолютную позицию другого транспортного средства, которая не основана на предыдущей информации позиции, связанной с другим транспортным средством, причем информация позиции служит в качестве стандарта и т.п., например, информация позиции на основе GPS-информации, связанной с другим транспортным средством. Например, модуль 13 режима захвата выполнен с возможностью захвата движущегося впереди поддерживающего связь транспортного средства на основе расстояния между транспортными средствами, конкретно, между основным транспортным средством и другим транспортным средством, которое основано на информации обнаружения другого транспортного средства, и GPS-информации, связанной с другим транспортным средством, которая основана на информации связи другого транспортного средства.
[0044] Например, когда передний датчик 21a расстояния между транспортными средствами захватывает движущееся впереди транспортное средство, модуль 13 режима захвата получает GPS-информацию основного транспортного средства, которая является информацией абсолютной позиции, связанной с основным транспортным средством, и GPS-информацию другого транспортного средства, которая является информацией абсолютной позиции, связанной с движущимся впереди транспортным средством, посредством связи. Модуль 13 режима захвата получает разность между координатами позиции, указываемыми посредством GPS-информации основного транспортного средства, и координатами позиции, указываемыми посредством GPS-информации другого транспортного средства, чтобы выполнять координатное преобразование в систему координат (см. фиг. 2), имеющую направление, в котором движется основное транспортное средство, в качестве начала координат, тем самым вычисляя относительное расстояние между направлением координаты X (направлением движения) и направлением координаты Y (направлением ширины транспортного средства, горизонтально ортогональным к направлению, в котором движется основное транспортное средство) движущегося впереди транспортного средства относительно основного транспортного средства. Затем, модуль 13 режима захвата сравнивает относительное расстояние между основным транспортным средством и движущимся впереди транспортным средством, которое основано на GPS-информации основного транспортного средства (информации основного транспортного средства) и GPS-информации другого транспортного средства (информации связи другого транспортного средства), с расстоянием между транспортными средствами, конкретно, между основным транспортным средством и движущимся впереди транспортным средством, которое основано на информации обнаружения другого транспортного средства, чтобы подтверждать степень совпадения относительного расстояния и расстояния между транспортными средствами. Расстояние между транспортными средствами, конкретно, между основным транспортным средством и движущимся впереди транспортным средством, которое основано на информации обнаружения другого транспортного средства, соответствует фактическому значению наблюдения движущегося впереди транспортного средства, обнаруженному посредством переднего датчика 21a расстояния между транспортными средствами, который является автономным датчиком. В случае, если отклонение между относительным расстоянием на основе информации связи другого транспортного средства и расстоянием между транспортными средствами на основе информации обнаружения другого транспортного средства является предварительно определенным значением, которое является предварительно установленным, или меньше, модуль 13 режима захвата допускает распознавание, что движущееся впереди транспортное средство, захваченное посредством переднего датчика 21a расстояния между транспортными средствами, является (движущимся впереди) поддерживающим связь транспортным средством, которое фактически поддерживает связь с основным транспортным средством. Следовательно, модуль 13 режима захвата выполнен с возможностью захвата поддерживающего связь транспортного средства. Иными словами, модуль 13 режима захвата подтверждает степень совпадения между позицией движущегося впереди транспортного средства, которая основана на информации связи другого транспортного средства, и позицией движущегося впереди транспортного средства, которая основана на информации обнаружения другого транспортного средства. Затем, когда степень совпадения является высокой, модуль 13 режима захвата распознает, что движущееся впереди транспортное средство, захваченное посредством переднего датчика 21a расстояния между транспортными средствами, является поддерживающим связь транспортным средством. Когда степень совпадения является низкой, модуль 13 режима захвата обнаруживает то, что движущееся впереди транспортное средство не является поддерживающим связь транспортным средством.
[0045] В данном документе, модуль 13 режима захвата захватывает поддерживающее связь транспортное средство на основе информации абсолютной позиции, на основе GPS-информации другого транспортного средства и т.п. Тем не менее, изобретение не ограничено этим. Например, модуль 13 режима захвата вычисляет статистику на основе анализа временных рядов для скорости движущегося впереди транспортного средства (или относительной скорости движущегося впереди транспортного средства в сравнении с основным транспортным средством), которая основана на информации связи другого транспортного средства, и для скорости движущегося впереди транспортного средства (или относительной скорости движущегося впереди транспортного средства в сравнении с основным транспортным средством), которая основана на информации обнаружения другого транспортного средства, посредством использования среднеквадратической ошибки или поправочного коэффициента, интегрально-дифференциального значения и т.п. Затем, модуль 13 режима захвата обнаруживает на основе статистики на основе анализа временных рядов то, является или нет движущееся впереди транспортное средство, захваченное посредством переднего датчика 21a расстояния между транспортными средствами, поддерживающим связь транспортным средством, которое фактически поддерживает связь с основным транспортным средством. В качестве способа вычисления статистики на основе анализа временных рядов, может применяться способ вычисления статистики на основе анализа временных рядов в другом варианте осуществления, описанный ниже, и, следовательно, его подробное описание опускается.
[0046] Модуль 14 режима отслеживания реализует режим отслеживания. Модуль 14 режима отслеживания идентифицирует поддерживающее связь транспортное средство на основе позиционной взаимосвязи между основным транспортным средством и поддерживающим связь транспортным средством во время захвата поддерживающего связь транспортного средства в режиме захвата, и информации движения, связанной с поддерживающим связь транспортным средством, которая основана на информации связи другого транспортного средства, принимаемой посредством радиоантенны 24a и ECU 24 управления радиоантенны, после захвата в режиме захвата, в качестве режима отслеживания. Иными словами, модуль 14 режима отслеживания идентифицирует поддерживающее связь транспортное средство на основе позиционной взаимосвязи между основным транспортным средством и поддерживающим связь транспортным средством, однократно захваченным в режиме захвата посредством модуля 13 режима захвата, в свете информации движения, связанной с поддерживающим связь транспортным средством, которая основана на информации связи другого транспортного средства. Модуль 14 режима отслеживания получает информацию обнаружения другого транспортного средства, информацию связи другого транспортного средства, информацию основного транспортного средства и т.п. из ECU 21 переднего датчика, ECU 22 датчика скорости, ECU 23 датчика ускорения, ECU 24 управления радиоантенны и т.п. через CAN 20 связи/системы датчиков.
[0047] Модуль 14 режима отслеживания этого варианта осуществления идентифицирует передающее транспортное средство на основе информации относительной позиции в режиме отслеживания. В данном документе, информация относительной позиции является информацией позиции, связанной с поддерживающим связь транспортным средством, которая основана на информации связи другого транспортного средства и является информацией позиции на основе опорной позиции, которая является позицией поддерживающего связь транспортного средства во время захвата в режиме захвата, и информации движения, связанной с поддерживающим связь транспортным средством. Более конкретно, информация относительной позиции является информацией относительной позиции, сформированной с учетом расстояния, на котором фактически движется поддерживающее связь транспортное средство, в соответствии с информацией движения, связанной с поддерживающим связь транспортным средством, относительно опорной позиции, которая является позицией поддерживающего связь транспортного средства во время захвата в режиме захвата.
[0048] Вышеупомянутая информация движения, связанная с поддерживающим связь транспортным средством, является информацией, связанной со скоростью и ускорением поддерживающего связь транспортного средства, которая основана на информации связи другого транспортного средства. Информация движения, связанная с поддерживающим связь транспортным средством, является, например, информацией с более высокой надежностью, чем GPS-информация, имеющая большую ошибку позиционирования, как описано выше. Модуль 14 режима отслеживания идентифицирует поддерживающее связь транспортное средство посредством использования информации движения, связанной с поддерживающим связь транспортным средством, в силу этого обеспечивая повышение точности идентификации поддерживающего связь транспортного средства. Иными словами, модуль 14 режима отслеживания выполнен с возможностью точную оценки позиционной взаимосвязи между основным транспортным средством и поддерживающим связь транспортным средством, типично, расстояния между транспортными средствами на основе информации движения, связанной с поддерживающим связь транспортным средством, которая имеет относительно высокую надежность, как описано ниже.
[0049] Модуль 14 режима отслеживания использует опорное расстояние между транспортными средствами для поддерживающего связь транспортного средства в качестве физической величины, указывающей опорную позицию, которая является позицией поддерживающего связь транспортного средства относительно основного транспортного средства во время захвата в режиме захвата. Опорное расстояние между транспортными средствами для поддерживающего связь транспортного средства соответствует физической величине, указывающей относительную позиционную взаимосвязь между основным транспортным средством и поддерживающим связь транспортным средством в опорной позиции поддерживающего связь транспортного средства во время захвата в режиме захвата. Более конкретно, опорное расстояние между транспортными средствами для поддерживающего связь транспортного средства соответствует относительному расстоянию между поддерживающим связь транспортным средством и основным транспортным средством во время захвата в режиме захвата. Иными словами, в данном документе информация относительной позиции является информацией позиции, которая формируется посредством суммирования и вычитания расстояния, на котором фактически движется поддерживающее связь транспортное средство, в соответствии с информацией движения, связанной с поддерживающим связь транспортным средством, относительно опорного расстояния между транспортными средствами согласно опорной позиции поддерживающего связь транспортного средства, и указывает относительное расстояние между поддерживающим связь транспортным средством и основным транспортным средством.
[0050] В режиме отслеживания модуль 14 режима отслеживания этого варианта осуществления идентифицирует поддерживающее связь транспортное средство на основе информации относительной позиции в точке определения ID (текущей точке) на основе информации предыдущей относительной позиции и информации движения, связанной с поддерживающим связь транспортным средством в идентичном текущем режиме отслеживания.
[0051] В данном документе, например, ECU 10 управления транспортного средства многократно выполняет различные управляющие процедуры в период управления в несколько сотен микросекунд или в несколько десятков миллисекунд. Информация относительной позиции в точке определения ID (текущей точке) соответствует информации позиции, указывающей оцененную позицию, в которой находится поддерживающее связь транспортное средство, на основе опорного расстояния между транспортными средствами и информации движения, связанной с поддерживающим связь транспортным средством, в текущей точке, а именно, в текущий период управления. В случае, если точка определения ID является текущим периодом управления, для информации предыдущей относительной позиции, типично может быть использована информация относительной позиции в период управления, по меньшей мере, на один период раньше, в данном документе, в предыдущий период управления. Информация относительной позиции в предыдущий период управления является информацией, указывающей предыдущее значение относительного расстояния между поддерживающим связь транспортным средством и основным транспортным средством, которое основано на опорном расстоянии между транспортными средствами и информации движения, связанной с поддерживающим связь транспортным средством. Каждая информация относительной позиции получается посредством сложения расстояния, на котором фактически движется поддерживающее связь транспортное средство, в соответствии со скоростью и ускорением, указываемыми посредством информации движения, связанной с поддерживающим связь транспортным средством, которая получается в каждый период управления, с опорным расстоянием между транспортными средствами согласно опорной позиции поддерживающего связь транспортного средства. Соответственно, информация предыдущей относительной позиции в идентичном текущем режиме отслеживания становится расстоянием на основе идентичного опорного расстояния между транспортными средствами.
[0052] Модуль 14 режима отслеживания суммирует и вычитает расстояние, на котором фактически движется поддерживающее связь транспортное средство, в соответствии со скоростью и ускорением, указываемыми посредством информации движения, связанной с поддерживающим связь транспортным средством в текущий период управления, относительно предыдущего значения относительного расстояния между поддерживающим связь транспортным средством и основным транспортным средством, которое основано на опорном расстоянии между транспортными средствами, указываемом посредством информации относительной позиции в предыдущий период управления и информации движения, связанной с поддерживающим связь транспортным средством, тем самым вычисляя информацию относительной позиции в точке определения ID (текущей точке). Следовательно, модуль 14 режима отслеживания выполнен с возможностью подавления рабочей величины и подавления ошибки, чтобы повышать точность выполнения операций, по сравнению со случаем, в котором расстояние, на котором фактически движется поддерживающее связь транспортное средство к настоящему моменту в каждый период управления, суммируется и вычитается относительно опорного расстояния между транспортными средствами каждый раз, когда поддерживающее связь транспортное средство перемещается.
[0053] В данном документе, модуль 14 режима отслеживания вычисляет информацию относительной позиции в точке определения ID на основе информации предыдущей относительной позиции и информации движения, связанной с поддерживающим связь транспортным средством. Тем не менее, изобретение не ограничено этим. Модуль 14 режима отслеживания может вычислять информацию относительной позиции в точке определения ID (текущей точке) посредством суммирования и вычитания расстояния, на котором фактически движется поддерживающее связь транспортное средство к настоящему моменту в каждый период управления, относительно опорного расстояния между транспортными средствами каждый раз, когда поддерживающее связь транспортное средство осуществляет движение.
[0054] Более конкретно, как проиллюстрировано на фиг. 4, модуль 14 режима отслеживания вводит информацию связи другого транспортного средства, включающую в себя информацию движения, связанную с другим транспортным средством, которая указывает скорость и ускорение другого транспортного средства, информацию обнаружения другого транспортного средства, указывающую расстояние между транспортными средствами и относительную скорость между основным транспортным средством и движущимся впереди транспортным средством, информацию основного транспортного средства, указывающую скорость и ускорение основного транспортного средства, и предыдущий результат определения. Модуль 14 режима отслеживания выполняет определение отслеживания (определение отклонения/нарушения) на основе этой информации связи другого транспортного средства, информации обнаружения другого транспортного средства, информации основного транспортного средства и предыдущего результата определения, и выводит результат определения отслеживания. В случае определения того, что другое транспортное средство, захваченное посредством переднего датчика 21a расстояния между транспортными средствами, и поддерживающее связь транспортное средство, которое фактически поддерживает связь с основным транспортным средством, совпадают в результате определения отслеживания, и определения того, что отслеживание продолжается, модуль 14 режима отслеживания поддерживает режим отслеживания без изменения. В случае, если модуль 14 режима отслеживания определяет то, что другое транспортное средство, захваченное посредством переднего датчика 21a расстояния между транспортными средствами, и поддерживающее связь транспортное средство, которое фактически поддерживает связь с основным транспортным средством, отличаются в результате определения отслеживания, и определяет то, что отслеживание завершается, модуль 13 режима захвата переходит в режим захвата, т.е. возвращается в режим захвата. Иными словами, в случае, если определяется то, что возникает отклонение/нарушение и т.п., модуль 13 режима захвата переходит в режим захвата, т.е. возвращается в режим захвата.
[0055] Модуль 14 режима отслеживания сначала вычисляет опорное расстояние между транспортными средствами для поддерживающего связь транспортного средства, которое является физической величиной, указывающей опорную позицию, представляющую собой позицию поддерживающего связь транспортного средства относительно основного транспортного средства во время захвата в режиме захвата, в качестве определения отслеживания (определения отклонения/нарушения). Модуль 14 режима отслеживания вычисляет оцененное расстояние между транспортными средствами, конкретно, между основным транспортным средством и поддерживающим связь транспортным средством во время захвата в режиме захвата, в качестве опорного расстояния между транспортными средствами. Модуль 14 режима отслеживания может использовать фактическое значение наблюдения движущегося впереди транспортного средства, обнаруженное посредством переднего датчика 21a расстояния между транспортными средствами, когда движущееся впереди поддерживающее связь транспортное средство захватывается в режиме захвата, а именно, расстояние между транспортными средствами, конкретно, между основным транспортным средством и движущимся впереди транспортным средством, которое основано на информации обнаружения другого транспортного средства, в качестве опорного расстояния между транспортными средствами без изменения. Тем не менее, в данном документе, чтобы повышать точность при вычислении опорного расстояния между транспортными средствами, модуль 14 режима отслеживания вычисляет оцененное расстояние между транспортными средствами, как описано ниже, чтобы использовать его в качестве опорного расстояния между транспортными средствами.
[0056] Иными словами, модуль 14 режима отслеживания вычисляет оцененное расстояние между транспортными средствами на основе (относительной) скорости и ускорения основного транспортного средства и другого транспортного средства и т.п., в дополнение к расстоянию между транспортными средствами, конкретно, между основным транспортным средством и движущимся впереди транспортным средством, которое основано на информации обнаружения другого транспортного средства. В данном документе, модуль 14 режима отслеживания оценивает оцененное расстояние между транспортными средствами посредством использования так называемого фильтра Калмана, в силу этого обеспечивая точную оценку оцененного расстояния между транспортными средствами, конкретно, между основным транспортным средством и поддерживающим связь транспортным средством во время захвата в режиме захвата. Фильтр Калмана имеет функцию комбинирования и слияния значений измерения (значений наблюдения) расстояния между транспортными средствами и т.п., захваченных посредством переднего датчика 21a расстояния между транспортными средствами, представляющего собой автономный датчик, и (системы) движения транспортного средства, таких как скорость, ускорение и т.п. основного транспортного средства и другого транспортного средства, полученных посредством связи, и вычисления значения оценки состояния движения. Этот фильтр Калмана является алгоритмом, балансирующим множество значений измерения, степени точности которых отличаются, и оцененное значение посредством уравнения состояния, описывающего движение транспортного средства, и оценивающим оптимальное состояние системы. Более конкретно, в случае, если оба из значений измерения и оцененного значения включают в себя ошибки, фильтр Калмана является алгоритмом, выполняющим надлежащее взвешивание в соответствии со степенью этих ошибок и оценивающим самое надежное состояние системы. Модуль 14 режима отслеживания вычисляет оцененное расстояние между транспортными средствами в качестве значения оценки состояния движения посредством использования фильтра Калмана на основе скорости и ускорения другого транспортного средства, которые основаны на информации связи другого транспортного средства, и скорости, ускорения и т.п. основного транспортного средства, которые основаны на информации основного транспортного средства, в дополнение к расстоянию между транспортными средствами, конкретно, между основным транспортным средством и движущимся впереди транспортным средством, на основе информации обнаружения другого транспортного средства. Затем, модуль 14 режима отслеживания использует оцененное расстояние между транспортными средствами в качестве вычисленного значения оценки состояния движения в качестве опорного расстояния между транспортными средствами.
[0057] Следовательно, модуль 14 режима отслеживания выполнен с возможностью точного вычисления опорного расстояния между транспортными средствами для поддерживающего связь транспортного средства с учетом не только значений измерения, полученных посредством автономных датчиков, предоставленных в основном транспортном средстве, но также и информации другого транспортного средства, например, его состояния движения, полученной через связь. Как результат, модуль 14 режима отслеживания выполнен с возможностью выполнения последующего процесса определения отслеживания в режиме отслеживания посредством использования точно вычисленного опорного расстояния между транспортными средствами.
[0058] Затем, модуль 14 режима отслеживания вычисляет относительное расстояние между основным транспортным средством и другим транспортным средством на основе опорного расстояния между транспортными средствами, вычисленного так, как описано выше, и информации движения, связанной с поддерживающим связь транспортным средством на основе информации связи другого транспортного средства. Иными словами, модуль 14 режима отслеживания вычисляет относительное расстояние, полученное посредством суммирования и вычитания расстояния, на котором фактически движется поддерживающее связь транспортное средство, в соответствии с информацией движения, связанной с поддерживающим связь транспортным средством, полученной посредством связи, относительно опорного расстояния между транспортными средствами, вычисленного так, как описано выше, чтобы использовать информацию позиции, указываемую посредством вычисленного относительного расстояния, в качестве информации относительной позиции.
[0059] Например, модуль 14 режима отслеживания вычисляет оцененное расстояние L_com между транспортными средствами на основе информации связи другого транспортного средства посредством использования следующей математической формулы (1). Это оцененное расстояние L_com между транспортными средствами на основе информации связи другого транспортного средства соответствует относительному расстоянию между основным транспортным средством и другим транспортным средством, которое получается посредством суммирования и вычитания расстояния, на котором фактически движется поддерживающее связь транспортное средство, в соответствии с информацией движения, связанной с поддерживающим связь транспортным средством, относительно опорного расстояния между транспортными средствами. Информация позиции, указываемая посредством оцененного расстояния L_com между транспортными средствами, соответствует информации относительной позиции, используемой в режиме отслеживания.
[0060] МАТЕМАТИЧЕСКОЕ ВЫРАЖЕНИЕ 1

[0061] В вышеупомянутой математической формуле (1), [L_com] обозначает оцененное расстояние между транспортными средствами на основе информации связи другого транспортного средства (в дальнейшем в этом документе, иногда называемое «оцененным расстоянием между транспортными средствами, определенным посредством связи»). [L_est] обозначает предыдущее значение оцененного расстояния между транспортными средствами, а [vr_com] обозначает (скорость другого транспортного средства на основе информации связи другого транспортного средства - скорость основного транспортного средства) (в дальнейшем в этом документе, иногда называемую «относительной скоростью, определенной посредством связи»). [ar_com] обозначает (ускорение другого транспортного средства на основе информации связи другого транспортного средства - ускорение основного транспортного средства) (в дальнейшем в этом документе, иногда называемое «относительным ускорением, определенным посредством связи»). "Δt" обозначает единицу времени согласно периоду управления. В данном документе, предыдущее значение [L_est] оцененного расстояния между транспортными средствами соответствует оцененному расстоянию [L_com] между транспортными средствами, определенному посредством связи, в предыдущий период управления. В случае, если предыдущее значение [L_est] оцененного расстояния между транспортными средствами является значением в начальный период управления в режиме отслеживания, опорное расстояние между транспортными средствами, конкретно, между основным транспортным средством и движущимся впереди транспортным средством во время захвата в режиме захвата просто используется без изменения.
[0062] Модуль 14 режима отслеживания сравнивает оцененное расстояние L_com между транспортными средствами, определенное посредством связи, с измеренным расстоянием L_fr между транспортными средствами на основе информации обнаружения другого транспортного средства (в дальнейшем в этом документе, «измеренным расстоянием между транспортными средствами, определенным посредством обнаружения»), в качестве определения отслеживания. В данном документе, измеренное расстояние L_fr между транспортными средствами посредством обнаружения соответствует значению измерения расстояния между транспортными средствами, конкретно, между основным транспортным средством и движущимся впереди транспортным средством, которое обнаруживается посредством переднего датчика 21a расстояния между транспортными средствами, представляющего собой автономный датчик, в идентичный период управления.
[0063] Как проиллюстрировано на фиг. 5, например, в случае, если степень совпадения между оцененным расстоянием L_com между транспортными средствами, определенным посредством связи из другого транспортного средства C2, которое едет впереди основного транспортного средства C1, и измеренным расстоянием L_fr между транспортными средствами, определенным посредством обнаружения, является относительно высокой, модуль 14 режима отслеживания выполнен с возможностью идентификации, что другое транспортное средство C2, захваченное посредством переднего датчика 21a расстояния между транспортными средствами, является поддерживающим связь транспортным средством, которое фактически поддерживает связь с основным транспортным средством C1. В этом случае, модуль 14 режима отслеживания определяет то, что отслеживание продолжается. С другой стороны, в случае, если степень совпадения между оцененным расстоянием L_com между транспортными средствами, определенным посредством связи из другого транспортного средства C3, которое едет впереди основного транспортного средства C1, и измеренным расстоянием L_fr между транспортными средствами, определенным посредством обнаружения, является относительно низкой, модуль 14 режима отслеживания выполнен с возможностью определения того, что другое транспортное средство C2, захваченное посредством переднего датчика 21a расстояния между транспортными средствами, отличается от другого транспортного средства C3, которое фактически осуществляет связь. В этом случае, модуль 14 режима отслеживания определяет то, что отслеживание завершается.
[0064] Другими словами, модуль 14 режима отслеживания определяет посредством использования информации движения, связанной с другим транспортным средством (скорости другого транспортного средства, ускорения другого транспортного средства), которая основана на информации связи другого транспортного средства с относительно высокой надежностью, то, «существует или нет идентичное движущееся впереди транспортное средство, идентифицированное в качестве поддерживающего связь транспортного средства в предыдущий период управления, в позиции, оцененной в соответствии с информацией движения, также в текущий период управления». Следовательно, модуль 14 режима отслеживания выполнен с возможностью выполнения определения продолжения отслеживания в отношении того, продолжается или нет идентификация идентичного поддерживающего связь транспортного средства, идентифицированного в предыдущий период управления.
[0065] Затем, в случае, если модуль 14 режима отслеживания определяет то, что отслеживание продолжается, режим отслеживания поддерживается без изменения. С другой стороны, в случае, если модуль 14 режима отслеживания определяет то, что отслеживание завершается, модуль 13 режима захвата переходит в режим захвата, т.е. возвращается в режим захвата.
[0066] Со ссылкой на блок-схему последовательности операций способа по фиг. 6, далее описывается пример процесса определения отслеживания в режиме отслеживания, выполняемого посредством ECU 10 управления транспортного средства. Эти управляющие процедуры многократно выполняются в период управления в несколько сотен микросекунд или в несколько десятков миллисекунд (то же применимо в дальнейшем).
[0067] Во-первых, после того, как модуль 13 режима захвата захватывает поддерживающее связь транспортное средство в режиме захвата, модуль 14 режима отслеживания рассчитывает оцененное расстояние L_com между транспортными средствами, определенное посредством связи, например, посредством использования математической формулы (1) (этап ST1). Модуль 14 режима отслеживания суммирует расстояние, на котором фактически движется поддерживающее связь транспортное средство, на основе передаваемых данных, а именно, информации движения, связанной с информацией связи другого транспортного средства из поддерживающего связь транспортного средства, с предыдущим значением L_est оцененного расстояния между транспортными средствами, чтобы рассчитывать оцененное расстояние L_com между транспортными средствами, определенное посредством связи. В данном документе, оцененное расстояние L_com между транспортными средствами, определенное посредством связи, является оцененным расстоянием между транспортными средствами, когда предполагается, что передаваемые данные (информация связи другого транспортного средства) являются данными движущегося впереди транспортного средства, захваченного посредством датчика 21a расстояния между транспортными средствами. В этом случае, в случае, если предыдущее значение [L_est] оцененного расстояния между транспортными средствами является значением в начальный период управления в режиме отслеживания, опорное расстояние между транспортными средствами, конкретно, между основным транспортным средством и движущимся впереди транспортным средством во время захвата в режиме захвата просто используется без изменения.
[0068] Затем, модуль 14 режима отслеживания определяет на основе информации обнаружения другого транспортного средства то, существует или нет в зоне обзора радара движущееся впереди транспортное средство, а именно, движущееся впереди транспортное средство, захваченное посредством переднего датчика 21a расстояния между транспортными средствами (этап ST2).
[0069] В случае, если модуль 14 режима отслеживания определяет то, что движущееся впереди транспортное средство в зоне обзора радара существует (этап ST2: "Да"), модуль 14 режима отслеживания вычисляет отклонение между оцененным расстоянием L_com между транспортными средствами, определенным посредством связи, вычисленным на этапе ST1, и измеренным расстоянием L_fr между транспортными средствами, определенным посредством обнаружения на основе информации обнаружения другого транспортного средства, в данном документе, абсолютное значение разности. Затем, модуль 14 режима отслеживания определяет то, продолжается или нет состояние, в котором абсолютное значение разности превышает предварительно установленное пороговое значение L_th расстояния между транспортными средствами, в течение предварительно определенного времени в T_th1 секунд, которое является предварительно установленным, или более (этап ST3). Пороговое значение L_th расстояния между транспортными средствами просто задается надлежащим образом в соответствии с фактической оценкой транспортного средства и т.п. Предварительно определенное время T_th1 является пороговым значением времени определения изменения движущегося впереди транспортного средства для определения изменения движущегося впереди транспортного средства и просто задается надлежащим образом в соответствии с фактической оценкой транспортного средства и т.п.
[0070] В случае, если модуль 14 режима отслеживания определяет то, что состояние, в котором абсолютное значение разности превышает пороговое значение L_th расстояния между транспортными средствами, не продолжается в течение предварительно определенного времени в T_th1 секунд или более (этап ST3: "Нет"), модуль 14 режима отслеживания идентифицирует то, что другое транспортное средство, захваченное посредством переднего датчика 21a расстояния между транспортными средствами, является поддерживающим связь транспортным средством, которое фактически поддерживает связь с основным транспортным средством. Затем, модуль 14 режима отслеживания определяет то, что отслеживание продолжается, чтобы поддерживать режим отслеживания без изменения (этап ST4), и завершает текущий период управления, чтобы переходить к следующему периоду управления.
[0071] В случае, если модуль 14 режима отслеживания определяет то, что состояние, в котором абсолютное значение разности превышает пороговое значение L_th расстояния между транспортными средствами, продолжается в течение предварительно определенного времени в T_th1 секунд или более (этап ST3: "Да"), модуль 14 режима отслеживания определяет то, что другое транспортное средство, захваченное посредством переднего датчика 21a расстояния между транспортными средствами, отличается от поддерживающего связь транспортного средства, которое фактически поддерживает связь с основным транспортным средством. Затем, модуль 14 режима отслеживания определяет то, что отслеживание завершается, и модуль 13 режима захвата переходит в режим захвата, т.е. возвращается в режим захвата (этап ST5), и завершает текущий период управления, чтобы переходить к следующему периоду управления.
[0072] В случае, если модуль 14 режима отслеживания определяет то, что движущееся впереди транспортное средство в зоне обзора радара отсутствует (этап ST2: "Нет") на этапе ST2 (этап ST2: "Нет"), модуль 14 режима отслеживания определяет то, длится или нет время продолжения, в течение которого отсутствует движущееся впереди транспортное средство в зоне обзора радара, в течение предварительно определенного времени в T_th2 секунд, которое является предварительно установленным, или более (этап ST6). Предварительно определенное время T_th2 является пороговым значением времени определения потерянного движущегося впереди транспортное средство для определения того, что движущееся впереди транспортное средство потеряно, и просто задается надлежащим образом в соответствии с фактической оценкой транспортного средства и т.п.
[0073] В случае, если модуль 14 режима отслеживания определяет то, что время продолжения, в течение которого отсутствует движущееся впереди транспортное средство в зоне обзора радара, не длится в течение предварительно определенного времени в T_th2 секунд или более (этап ST6: "Нет"), модуль 14 режима отслеживания переходит к этапу ST4. С другой стороны, в случае определения того, длится или нет время продолжения, в течение которого отсутствует движущееся впереди транспортное средство в зоне обзора радара, в течение предварительно определенного времени в T_th2 секунд или более (этап ST6: "Да"), модуль 14 режима отслеживания переходит к этапу ST5.
[0074] Иными словами, в случае, если движущееся впереди транспортное средство на мгновение отклоняется от дальности R обнаружения переднего датчика 21a расстояния между транспортными средствами, модуль 14 режима отслеживания не позволяет сразу возвращаться в режим захвата, а продолжает режим отслеживания без изменения в случае, если движущееся впереди транспортное средство снова возвращается в диапазоны R обнаружения в течение предварительно определенного времени, и передний датчик 21a расстояния между транспортными средствами снова обнаруживает движущееся впереди транспортное средство. В течение этого времени модуль 14 режима отслеживания продолжает рассчитывать оцененное расстояние L_com между транспортными средствами, определенное посредством связи, в каждый период управления. С другой стороны, в случае, если движущееся впереди транспортное средство не возвращается в диапазон R обнаружения снова, когда истекает предварительно определенное время или более, модуль 14 режима отслеживания завершает режим отслеживания, чтобы позволять режиму возвращаться в режим захвата. Следовательно, ECU 10 управления транспортного средства выполнен с возможностью подавления слишком частого переключения между режимом отслеживания и режимом захвата и подавления возникновения флуктуации в управлении.
[0075] Система 1 управления транспортного средства, сконфигурированная так, как описано выше, выполнена с возможностью переключения между режимом захвата и режимом отслеживания в качестве режима для идентификации поддерживающего связь транспортного средства и идентифицирует поддерживающее связь транспортное средство посредством использования позиционной взаимосвязи между другим транспортным средством, захваченным в режиме захвата, и основным транспортным средством и информации движения другого транспортного средства, полученной посредством связи, во время режима отслеживания. Следовательно, система 1 управления транспортного средства выполнена с возможностью последовательного получения информации движения поддерживающего связь транспортного средства с относительно высокой надежностью на основе информации связи другого транспортного средства посредством режима отслеживания после однократного захвата поддерживающего связь транспортного средства в режиме захвата и идентификации поддерживающего связь транспортного средства на основе этой информации движения поддерживающего связь транспортного средства. Следовательно, можно повышать точность идентификации поддерживающего связь транспортного средства.
[0076] Фиг. 7 является схематическим графиком, представляющим пример работы системы 1 управления транспортного средства. На фиг. 7, горизонтальная ось обозначает проезжаемое расстояние, а вертикальные оси обозначают относительную поперечную позицию другого транспортного средства относительно основного транспортного средства, расстояние между транспортными средствами и ID движущегося впереди поддерживающего связь транспортного средства. В данном документе, например, описывается случай, в котором два других транспортных средства C2 и C3 параллельно движутся на смежных полосах движения впереди основного транспортного средства C1, как проиллюстрировано на фиг. 8.
[0077] Например, система 1 управления транспортного средства захватывает другое транспортное средство C2 в качестве поддерживающего связь транспортного средства в режиме захвата в точке P1 перед точкой P2, в которой начинается участок туннеля, в направлении, в котором движется основное транспортное средство C1, и после этого переходит в режим отслеживания, чтобы продолжать идентификацию транспортного средства посредством режима отслеживания. Затем, даже когда основное транспортное средство C1 проходит точку P2 и въезжает в участок туннеля, система 1 управления транспортного средства продолжает режим отслеживания и продолжает идентификацию поддерживающего связь транспортного средства посредством использования позиционной взаимосвязи между другим транспортным средством, захваченным в режиме захвата, и основным транспортным средством и информации движения другого транспортного средства, полученной посредством связи.
[0078] В данном документе предполагается, что система управления транспортного средства согласно сравнительному примеру продолжает идентифицировать поддерживающее связь транспортное средство посредством GPS-информации в участке туннеля. В этом случае, например, когда другие транспортные средства C2 и C3 появляются на повороте в участке туннеля, сплошные линии L11 и L12, представляющие фактическую относительную поперечную позицию, и пунктирные линии L11a и L12a, представляющие относительную поперечную позицию, указываемую посредством GPS-информации, отделяются друг от друга. Как результат, система управления транспортного средства согласно сравнительному примеру может некорректно распознавать другое транспортное средство C2 и другое транспортное средство C3 около обведенной линии A и некорректно обнаруживает поддерживающее связь транспортное средство.
[0079] Напротив, система 1 управления транспортного средства этого варианта осуществления выполнена с возможностью идентификации поддерживающего связь транспортного средства на основе информации движения поддерживающего связь транспортного средства с относительно высокой надежностью посредством режима отслеживания после однократного захвата поддерживающего связь транспортного средства в режиме захвата. Следовательно, даже когда основное транспортное средство C1 въезжает в участок туннеля в системе 1 управления транспортного средства, сплошная линия L21, представляющая оцененное расстояние между транспортными средствами, конкретно, между основным транспортным средством и другим транспортным средством, определенное посредством связи, и пунктирная линия L22, представляющая измеренное расстояние между транспортными средствами, конкретно, между основным транспортным средством и другим транспортным средством посредством обнаружения, почти совпадают друг с другом. В таком случае, сплошная линия L31, указывающая ID фактического движущегося впереди поддерживающего связь транспортного средства, и пунктирная линия L32, указывающая ID движущегося впереди поддерживающего связь транспортного средства, идентифицированного посредством режима отслеживания, совпадают друг с другом, и система 1 управления транспортного средства выполнена с возможностью точной идентификации поддерживающего связь транспортного средства даже в участке туннеля.
[0080] Соответственно, система 1 управления транспортного средства выполнена с возможностью реализации широкомасштабной идентификации поддерживающего связь транспортного средства с высокой точностью даже в окружающей обстановке, в которой ошибка позиционирования посредством GPS зачастую становится относительно большой, например, в городском районе, в котором часто встречаются туннели или разветвления дорог и т.п.
[0081] Дополнительно, например, система 1 управления транспортного средства выполнена с возможностью реализации идентификации поддерживающего связь транспортного средства с относительно высокой точностью, по сравнению со случаем, в котором идентификация поддерживающего связь транспортного средства продолжается на основе статистики на основе анализа временных рядов для скорости движущегося впереди транспортного средства на основе информации связи другого транспортного средства и для скорости движущегося впереди транспортного средства на основе информации обнаружения другого транспортного средства.
[0082] Например, предполагается, что система управления транспортного средства согласно сравнительному примеру продолжает идентифицировать поддерживающее связь транспортное средство на основе вышеупомянутой статистики на основе анализа временных рядов. В этом случае, например, в случае, если имеется относительно большое число транспортных средств, которые движутся с идентичной скоростью в фактическом окружающем трафике, к примеру, на шоссе, когда система управления транспортного средства согласно сравнительному примеру продолжает идентифицировать поддерживающее связь транспортное средство на основе вышеупомянутой статистики на основе анализа временных рядов, и появляется другое транспортное средство, которое движется с идентичной скоростью, транспортное средство, для которого выполняется идентификация поддерживающего связь транспортного средства, может переключаться на вышеупомянутое другое транспортное средство. Напротив, система управления транспортного средства согласно сравнительному примеру должна строго задавать различные пороговые значения определения, с тем чтобы не вызывать вышеупомянутое переключение результата идентификации, или должна увеличивать целевой период статистики на основе анализа временных рядов. Следовательно, период определения поддерживающего связь транспортного средства может относительно увеличиваться, и необнаруженное состояние поддерживающего связь транспортного средства может увеличиваться.
[0083] Тем не менее, система 1 управления транспортного средства этого варианта осуществления выполнена с возможностью идентификации поддерживающего связь транспортного средства на основе информации движения поддерживающего связь транспортного средства с относительно высокой надежностью посредством режима отслеживания после однократного захвата поддерживающего связь транспортного средства в режиме захвата, и, следовательно, выполнена с возможностью точной идентификации поддерживающего связь транспортного средства в сравнительно короткий период определения.
[0084] Система 1 управления транспортного средства согласно варианту осуществления, описанному выше, включает в себя радиоантенну 24a и ECU 24 управления радиоантенны, которые принимают информацию связи другого транспортного средства (информацию другого транспортного средства) для другого транспортного средства около основного транспортного средства, передний датчик 21a расстояния между транспортными средствами и ECU 21 переднего датчика, которые обнаруживают другое транспортное средство около основного транспортного средства, и ECU 10 управления транспортного средства, который идентифицирует поддерживающее связь транспортное средство (передающее транспортное средство) с информацией связи другого транспортного средства на основе информации связи другого транспортного средства, принимаемой посредством радиоантенны 24a и ECU 24 управления радиоантенны, и результата обнаружения посредством переднего датчика 21a расстояния между транспортными средствами и ECU 21 переднего датчика. ECU 10 управления транспортного средства выполнено с возможностью переключения между режимом захвата для захвата поддерживающего связь транспортного средства на основе информации связи другого транспортного средства, принимаемой посредством радиоантенны 24a и ECU 24 управления радиоантенны, и результата обнаружения посредством переднего датчика 21a расстояния между транспортными средствами и ECU 21 переднего датчика, и режимом отслеживания для идентификации поддерживающего связь транспортного средства на основе позиционной взаимосвязи между основным транспортным средством и поддерживающим связь транспортным средством во время захвата в режиме захвата и информации движения, связанной с поддерживающим связь транспортным средством, которая основана на информации связи другого транспортного средства, принимаемой посредством радиоантенны 24a и ECU 24 управления радиоантенны, после захвата в режиме захвата.
[0085] Следовательно, система 1 управления транспортного средства и ECU 10 управления транспортного средства допускают идентификацию поддерживающего связь транспортного средства на основе информации движения поддерживающего связь транспортного средства с относительно высокой надежностью посредством режима отслеживания после однократного захвата поддерживающего связь транспортного средства в режиме захвата. Следовательно, можно повышать стойкость к окружающей обстановке, чтобы обеспечивать так называемую устойчивость, и можно повышать точность идентификации поддерживающего связь транспортного средства.
[0086] ВТОРОЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Фиг. 9 является принципиальной схемой конфигурации, представляющей систему управления транспортного средства согласно варианту 2 осуществления, фиг. 10 является принципиальной схемой, иллюстрирующей некорректное распознавание поддерживающего связь транспортного средства, фиг. 11 является принципиальной схемой, иллюстрирующей внутреннее состояние ECU управления транспортного средства согласно варианту 2 осуществления, фиг. 12 является принципиальной схемой конфигурации, представляющей модуль определения некорректного распознавания ECU управления транспортного средства согласно варианту 2 осуществления, и фиг. 13 является блок-схемой последовательности операций способа, иллюстрирующей пример управления определением некорректного распознавания в ECU управления транспортного средства согласно варианту 2 осуществления. Система идентификации транспортного средства и устройство идентификации транспортного средства согласно варианту 2 осуществления отличаются от системы и устройства идентификации транспортного средства по варианту 1 осуществления тем, что выполняется определение некорректного распознавания. Помимо этого, избыточное описание для конфигураций, этапов и преимуществ, которые являются идентичными конфигурациям, этапам и преимуществам вышеупомянутого варианта осуществления, при возможности опускается.
[0087] Система 201 управления транспортного средства, служащая в качестве системы идентификации транспортного средства этого варианта осуществления, показанная на фиг. 9, включает в себя ECU 210 управления транспортного средства, который используется в качестве устройства идентификации транспортного средства и устройства управления движением. В функционально концептуальном отношении ECU 210 управления транспортного средства содержит модуль 211 идентификации транспортного средства и модуль 212 управления движением. Модуль 211 идентификации транспортного средства этого варианта осуществления включает в себя модуль 13 режима захвата, модуль 14 режима отслеживания и модуль 215 определения некорректного распознавания.
[0088] Модуль 215 определения некорректного распознавания определяет некорректное распознавание поддерживающего связь транспортного средства в соответствии с результатом сравнения между информацией движения, связанной с поддерживающим связь транспортным средством, которая основана на информации связи другого транспортного средства, принимаемой посредством радиоантенны 24a и ECU 24 управления радиоантенны, и информацией обнаружения другого транспортного средства, которая является результатом обнаружения посредством переднего датчика 21a расстояния между транспортными средствами и ECU 21 переднего датчика в режиме отслеживания.
[0089] В ECU 210 управления транспортного средства, после того, как модуль 13 режима захвата однократно захватывает поддерживающее связь транспортное средство в режиме захвата, модуль 14 режима отслеживания продолжает идентифицировать поддерживающее связь транспортное средство на основе информации движения поддерживающего связь транспортного средства с относительно высокой надежностью посредством режима отслеживания.
[0090] В данном документе, например, в ECU 210 управления транспортного средства, как проиллюстрировано на фиг. 10, предполагается случай, в котором модуль 13 режима захвата некорректно распознает другое транспортное средство C3, которое отличается от другого транспортного средства C2, захваченного посредством переднего датчика 21a расстояния между транспортными средствами, в качестве поддерживающего связь транспортного средства в режиме захвата, и захватывает другое транспортное средство C3. В этом случае, в ECU 210 управления транспортного средства, последующее определение отслеживания и идентификация поддерживающего связь транспортного средства в режиме отслеживания посредством модуля 14 режима отслеживания могут продолжать выполняться для некорректного транспортного средства, тем самым влияя на последующее следящее управление.
[0091] Напротив, в режиме отслеживания, модуль 215 определения некорректного распознавания одновременно отслеживает состояние посредством сравнения информации обнаружения другого транспортного средства, обнаруженной посредством переднего датчика 21a расстояния между транспортными средствами, который является автономным датчиком, с информацией движения, связанной с информацией связи другого транспортного средства, полученной через радиоантенну 24a, за счет этого подавляя продолжение некорректной идентификации поддерживающего связь транспортного средства.
[0092] Как показано на фиг. 11, например, ECU 210 управления транспортного средства добавляет определение некорректного распознавания для поддерживающего связь транспортного средства согласно результату сравнения между информацией движения поддерживающего связь транспортного средства на основе информации связи другого транспортного средства и информацией обнаружения другого транспортного средства посредством модуля 215 определения некорректного распознавания, в качестве условия возврата из режима отслеживания в режим захвата. В случае, если модуль 215 определения некорректного распознавания определяет некорректное распознавание для поддерживающего связь транспортного средства в режиме отслеживания, модуль 14 режима отслеживания определяет то, что отслеживание завершается, и модуль 13 режима захвата переходит в режим захвата, т.е. возвращается в режим захвата.
[0093] Более конкретно, как проиллюстрировано на фиг. 12, информация связи другого транспортного средства, включающая в себя информацию движения другого транспортного средства, указывающую скорость другого транспортного средства, и информация обнаружения другого транспортного средства, указывающая относительную скорость между основным транспортным средством и движущимся впереди транспортным средством, и информация основного транспортного средства, указывающая скорость основного транспортного средства, вводятся в модуль 215 определения некорректного распознавания. Модуль 215 определения некорректного распознавания определяет некорректное распознавание, в данном документе, сравнение на основе анализа временных рядов для скорости, на основе этой информации связи другого транспортного средства, информации обнаружения другого транспортного средства и информации основного транспортного средства, и выводит результат определения.
[0094] Модуль 215 определения некорректного распознавания вычисляет статистику на основе анализа временных рядов для скорости движущегося впереди транспортного средства (или относительной скорости движущегося впереди транспортного средства в сравнении с основным транспортным средством) на основе информации связи другого транспортного средства и для скорости движущегося впереди транспортного средства (или относительной скорости движущегося впереди транспортного средства в сравнении с основным транспортным средством) на основе информации обнаружения другого транспортного средства, например, посредством использования среднеквадратической ошибки или поправочного коэффициента, интегрально-дифференциального значения и т.п. Статистика на основе анализа временных рядов для скорости соответствует результату сравнения между информацией движения поддерживающего связь транспортного средства на основе информации связи другого транспортного средства и информацией обнаружения другого транспортного средства. В качестве примера, модуль 215 определения некорректного распознавания вычисляет среднеквадратическую ошибку между скоростью движущегося впереди транспортного средства на основе информации связи другого транспортного средства и скоростью движущегося впереди транспортного средства на основе информации обнаружения другого транспортного средства в качестве статистики на основе анализа временных рядов, например, посредством использования следующей математической формулы (2). В этом случае, модуль 215 определения некорректного распознавания выполнен с возможностью вычисления скорости движущегося впереди транспортного средства на основе информации обнаружения другого транспортного средства, например, посредством суммирования скорости основного транспортного средства с относительной скоростью движущегося впереди транспортного средства, которая основана на информации обнаружения другого транспортного средства.
[0095] МАТЕМАТИЧЕСКОЕ ВЫРАЖЕНИЕ 2
[0096] В вышеупомянутой математической формуле (2), [Xrms] обозначает среднеквадратическую ошибку между скоростью движущегося впереди транспортного средства на основе информации связи другого транспортного средства и скоростью движущегося впереди транспортного средства на основе информации обнаружения другого транспортного средства, а [xi] обозначает разность между скоростью движущегося впереди транспортного средства на основе информации обнаружения другого транспортного средства и скоростью движущегося впереди транспортного средства на основе информации связи другого транспортного средства.
[0097] Модуль 215 определения некорректного распознавания определяет на основе среднеквадратической ошибки Xrms в качестве статистики на основе анализа временных рядов то, является или нет движущееся впереди транспортное средство, захваченное посредством переднего датчика 21a расстояния между транспортными средствами, поддерживающим связь транспортным средством, которое фактически поддерживает связь с основным транспортным средством, в режиме отслеживания, а именно, определяет некорректное распознавание для поддерживающего связь транспортного средства, и выводит результат определения. В случае, если среднеквадратическая ошибка Xrms составляет предварительно установленное пороговое значение квадратической ошибки или больше, модуль 215 определения некорректного распознавания определяет то, что поддерживающее связь транспортное средство является некорректно распознанным. Пороговое значение квадратической ошибки надлежащим образом задается в соответствии с фактической оценкой транспортного средства.
[0098] Затем, в случае, если результат определения некорректного распознавания посредством модуля 215 определения некорректного распознавания раскрывает, что некорректное распознавание не выявлено, модуль 14 режима отслеживания поддерживает режим отслеживания без изменения. В случае, если результат определения некорректного распознавания посредством модуля 215 определения некорректного распознавания раскрывает, что выявлено некорректное распознавание, модуль 14 режима отслеживания завершает отслеживание, и модуль 13 режима захвата переходит в режим захвата, т.е. возвращается в режим захвата.
[0099] Следовательно, даже в случае, если модуль 13 режима захвата распознает и захватывает некорректное поддерживающее связь транспортное средство в режиме захвата, когда скорость поддерживающего связь транспортного средства, которое является некорректно распознанным, и скорость движущегося впереди транспортного средства, которое движется непосредственно впереди основного транспортного средства, становятся различными, система 201 управления транспортного средства выполнена с возможностью быстрого определения расхождения движения обоих транспортных средств. Следовательно, система 201 управления транспортного средства выполнена с возможностью быстрого определения некорректного распознавания для поддерживающего связь транспортного средства. Как результат, в случае, если обнаруживается некорректное распознавание для поддерживающего связь транспортного средства, система 201 управления транспортного средства выполнена с возможностью быстрого возвращения в режим захвата. Соответственно, система 201 управления транспортного средства выполнена с возможностью подавления продолжения последующей идентификации поддерживающего связь транспортного средства для некорректного транспортного средства в режиме отслеживания посредством модуля 14 режима отслеживания. Следовательно, система 201 управления транспортного средства может не допускать влияния некорректного распознавания для поддерживающего связь транспортного средства на последующее следящее управление.
[0100] Затем, модуль 212 управления движением этого варианта осуществления управляет основным транспортным средством на основе результата определения некорректного распознавания посредством модуля 215 определения некорректного распознавания. В частности, во время возвращения из режима отслеживания в режим захвата в соответствии с результатом сравнения между информацией движения поддерживающего связь транспортного средства на основе информации связи другого транспортного средства и информацией обнаружения другого транспортного средства, другими словами, со среднеквадратической ошибкой Xrms в качестве статистики на основе анализа временных рядов, модуль 212 управления движением управляет замедлением основного транспортного средства на основе замедления другого транспортного средства, указываемого посредством информации обнаружения другого транспортного средства. Иными словами, когда модуль 215 определения некорректного распознавания определяет некорректное распознавание для поддерживающего связь транспортного средства, модуль 212 управления движением управляет замедлением основного транспортного средства на основе замедления другого транспортного средства, указываемого посредством информации обнаружения другого транспортного средства. В этом случае, модуль 212 управления движением формирует информацию значения запроса на ускорение таким образом, что замедление основного транспортного средства равно замедлению другого транспортного средства, которое основано на информации обнаружения другого транспортного средства, чтобы выводить информацию значения запроса на ускорение в ECU 31 управления двигателем и т.п. В этом случае, например, модуль 212 управления движением различает скорость другого транспортного средства на основе информации обнаружения другого транспортного средства, которая вычисляется посредством модуля 215 определения некорректного распознавания, в силу этого обеспечивая вычисление ускорения/замедления другого транспортного средства на основе информации обнаружения другого транспортного средства.
[0101] В этом случае, например, как проиллюстрировано на фиг. 10, в случае, если модуль 13 режима захвата некорректно распознает другое транспортное средство C3, которое отличается от другого транспортного средства C2, захваченного посредством переднего датчика 21a расстояния между транспортными средствами, в качестве поддерживающего связь транспортного средства в режиме захвата, и захватывает другое транспортное средство C3, система 201 управления транспортного средства выполнена с возможностью управления таким образом, что замедление основного транспортного средства C1 равно фактическому замедлению другого транспортного средства C2. Следовательно, даже в случае, если поддерживающее связь транспортное средство является некорректно распознанным, когда скорость другого транспортного средства C3, которое является некорректно распознанным, и скорость другого транспортного средства C2, которое движется непосредственно впереди основного транспортного средства, становятся различными, система 201 управления транспортного средства реализует управление таким образом, что основное транспортное средство C1 замедляется в сочетании с замедлением другого транспортного средства C2, без необходимости следить за ускорением другого транспортного средства C3. Следовательно, система 201 управления транспортного средства выполнена с возможностью надлежащего обеспечения расстояния между транспортными средствами, конкретно, между основным транспортным средством C1 и другим транспортным средством C2, которое движется непосредственно впереди основного транспортного средства C1. После этого, система 201 управления транспортного средства выполнена с возможностью надлежащего переключения, например, на следящее управление на основе информации обнаружения, которое не использует информацию другого транспортного средства, принимаемую по радиосвязи, после того, как обеспечивается достаточное расстояние между транспортными средствами, конкретно, между основным транспортным средством C1 и другим транспортным средством C2.
[0102] Со ссылкой на блок-схему последовательности операций способа по фиг. 13, описывается пример управления определением некорректного распознавания, выполняемого посредством ECU 210 управления транспортного средства.
[0103] Когда режим для идентификации поддерживающего связь транспортного средства переходит из режима захвата в режим отслеживания, модуль 215 определения некорректного распознавания вычисляет скорость по показаниям радара, а именно, скорость движущегося впереди транспортного средства, захваченного посредством переднего датчика 21a расстояния между транспортными средствами (этап ST21). Например, модуль 215 определения некорректного распознавания вычисляет скорость по показаниям радара движущегося впереди транспортного средства, которая основана на информации обнаружения другого транспортного средства, посредством суммирования скорости основного транспортного средства, а именно, скорости основного транспортного средства на основе информации основного транспортного средства, с относительной скоростью по показаниям радара, а именно, относительной скоростью движущегося впереди транспортного средства, которая основана на информации обнаружения другого транспортного средства.
[0104] Модуль 215 определения некорректного распознавания получает скорость поддерживающего связь транспортного средства, а именно, скорость, принимаемую из движущегося впереди транспортного средства, в данный момент идентифицированного в качестве поддерживающего связь транспортного средства, на основе информации связи другого транспортного средства (этап ST22).
[0105] Модуль 215 определения некорректного распознавания вычисляет абсолютное значение разности между скоростью по показаниям радара, вычисленной на этапе ST21, и скоростью поддерживающего связь транспортного средства, вычисленной на этапе ST22, тем самым вычисляя разность скоростей (этап ST23).
[0106] Модуль 215 определения некорректного распознавания определяет то, составляет или нет разность скоростей, вычисленная на этапе ST23, предварительно установленное верхнее предельное значение разности скоростей или больше (этап ST24). Верхнее предельное значение разности скоростей просто задается надлежащим образом в соответствии с фактической оценкой транспортного средства и т.п.
[0107] В случае, если модуль 215 определения некорректного распознавания определяет то, что разность скоростей составляет верхнее предельное значение разности скоростей или меньше (этап ST24: "Да"), модуль 215 определения некорректного распознавания рассчитывает статистику на основе анализа временных рядов для скорости по показаниям радара, вычисленной на этапе ST21, и для скорости поддерживающего связь транспортного средства, вычисленной на этапе ST22 (этап ST25). В данном документе, модуль 215 определения некорректного распознавания вычисляет, например, среднеквадратическую ошибку между скоростью по показаниям радара и скоростью поддерживающего связь транспортного средства посредством использования вышеупомянутой математической формулы (2) в качестве статистики на основе анализа временных рядов.
[0108] Затем, модуль 215 определения некорректного распознавания определяет то, меньше или нет статистика на основе анализа временных рядов, вычисленная на этапе ST25, предварительно установленного порогового значения, в данном документе, меньше или нет среднеквадратическая ошибка предварительно установленного порогового значения квадратической ошибки (этап ST26).
[0109] В случае, если модуль 215 определения некорректного распознавания определяет то, что среднеквадратическая ошибка меньше порогового значения квадратической ошибки (этап ST26: "Да"), модуль 215 определения некорректного распознавания определяет то, что состояние распознавания поддерживающего связь транспортного средства является нормальным, и модуль 14 режима отслеживания продолжает режим отслеживания (этап ST27), завершает текущий период управления и переходит к следующему периоду управления.
[0110] В случае, если модуль 215 определения некорректного распознавания определяет то, что разность скоростей превышает верхнее предельное значение разности скоростей на этапе ST24 (этап ST24: "Нет"), в случае, если модуль 215 определения некорректного распознавания определяет то, что среднеквадратическая ошибка составляет пороговое значение квадратической ошибки или больше, на этапе ST26 (этап ST26: "Нет"), модуль 215 определения некорректного распознавания определяет то, что состояние распознавания поддерживающего связь транспортного средства является анормальным, а именно, поддерживающее связь транспортное средство является некорректно распознанным. Затем, модуль 14 режима отслеживания завершает режим отслеживания, и модуль 13 режима захвата переходит в режим захвата, т.е. возвращается в режим захвата (этап ST28).
[0111] Модуль 212 управления движением определяет то, меньше или нет ускорение/замедление движущегося впереди транспортного средства согласно оценке по радару ACC-запрошенного ускорения/замедления, меньше или нет это ускорение/замедление движущегося впереди транспортного средства согласно оценке по радару 0, и находится или нет истекшее время от обнаружения некорректного распознавания для поддерживающего связь транспортного средства в пределах предварительно установленных N секунд (этап ST29). Модуль 212 управления движением различает скорость по показаниям радара, вычисленную на этапе ST21, в силу этого обеспечивая вычисление ускорения/замедления движущегося впереди транспортного средства согласно оценке по радару. ACC-запрошенное ускорение/замедление является ускорением/замедлением, требуемым в соответствии с целевым ускорением транспортного средства (целевым замедлением транспортного средства) при следящем управлении на основе информации обнаружения, которое не использует информацию другого транспортного средства по радиосвязи. Текущие N секунд просто задаются надлежащим образом в качестве времени, в течение которого может обеспечиваться достаточное расстояние между транспортными средствами, когда основное транспортное средство замедляется, совпадая с движущимся впереди транспортным средством в соответствии с фактической оценкой транспортного средства и т.п.
[0112] В случае, если модуль 212 управления движением определяет то, что ускорение/замедление движущегося впереди транспортного средства согласно оценке по радару меньше ACC-запрошенного ускорения/замедления, это ускорение/замедление движущегося впереди транспортного средства согласно оценке по радару меньше 0, и истекшее время от обнаружения некорректного распознавания для поддерживающего связь транспортного средства находится в пределах предварительно установленных N секунд (этап ST29: "Да"), модуль 212 управления движением задает запрошенное ускорение/замедление, запрашиваемое для основного транспортного средства, в качестве ускорения/замедления движущегося впереди транспортного средства согласно оценке по радару. Затем, модуль 212 управления движением управляет ускорением/замедлением основного транспортного средства на основе заданного запрошенного ускорения/замедления (этап ST30) и после этого возвращается на этапе ST29, чтобы многократно выполнять последующие процессы.
[0113] В случае, если модуль 212 управления движением определяет то, что ускорение/замедление движущегося впереди транспортного средства согласно оценке по радару является ACC-запрошенным ускорением/замедлением или больше, в случае, если модуль 212 управления движением определяет то, что ускорение/замедление движущегося впереди транспортного средства согласно оценке по радару 0 или больше, или в случае, если модуль 212 управления движением определяет то, что истекшее время от обнаружения некорректного распознавания для поддерживающего связь транспортного средства превышает N секунд (этап ST29: "Нет"), модуль 212 управления движением переходит к следящему управлению на основе информации обнаружения (этап ST31), завершает текущий период управления и переходит к следующему периоду управления. Модуль 212 управления движением находится в состоянии, в котором расстояние между транспортными средствами может надлежащим образом обеспечиваться даже при выполнении следящего управления на основе информации обнаружения, и в силу этого отсутствуют проблемы, даже когда модуль 212 управления движением переходит от следящего управления на основе обмена информацией к следящему управлению на основе информации обнаружения.
[0114] Процессы на этапе ST29-ST31, описанные выше, соответствуют управлению при определении некорректного распознавания, выполняемом посредством модуля 212 управления движением, когда модуль 215 определения некорректного распознавания определяет некорректное распознавание для поддерживающего связь транспортного средства. В случае, если поправочный коэффициент между скоростью по показаниям радара и скоростью поддерживающего связь транспортного средства рассчитывается в качестве статистики на основе анализа временных рядов на этапе ST25, модуль 215 определения некорректного распознавания определяет то, превышает или нет поправочный коэффициент предварительно установленное пороговое значение поправочного коэффициента, на этапе ST26. В этом случае, в случае, если модуль 215 определения некорректного распознавания определяет то, что поправочный коэффициент превышает пороговое значение поправочного коэффициента (этап ST26: "Да"), процесс переходит к этапу ST27. Когда определяется то, что поправочный коэффициент составляет пороговое значение поправочного коэффициента или меньше (этап ST26: "Нет"), процесс переходит к этапу ST28.
[0115] Система 201 управления транспортного средства и ECU 210 управления транспортного средства согласно варианту осуществления, описанному выше, выполнены с возможностью идентификации поддерживающего связь транспортного средства на основе информации движения поддерживающего связь транспортного средства с относительно высокой надежностью посредством режима отслеживания после однократного захвата поддерживающего связь транспортного средства в режиме захвата. Следовательно, можно повышать стойкость к окружающей обстановке, чтобы обеспечивать так называемую устойчивость, и можно повышать точность идентификации поддерживающего связь транспортного средства.
[0116] Кроме того, согласно системе 201 управления транспортного средства согласно варианту осуществления, описанному выше, ECU 210 управления транспортного средства возвращается в режим захвата в соответствии с результатом сравнения между информацией движения поддерживающего связь транспортного средства на основе информации связи другого транспортного средства, принимаемой посредством радиоантенны 24a и ECU 24 управления радиоантенны, и результатом обнаружения посредством переднего датчика 21a расстояния между транспортными средствами и ECU 21 переднего датчика в режиме отслеживания.
[0117] Следовательно, даже в случае, если система 201 управления транспортного средства и ECU 210 управления транспортного средства распознают и захватывают некорректное поддерживающее связь транспортное средство в режиме захвата, система 201 управления транспортного средства и ECU 210 управления транспортного средства выполнены с возможностью быстрого обнаружения расхождения движения поддерживающего связь транспортного средства, некорректно распознанного, и другого транспортного средства, которое движется непосредственно впереди основного транспортного средства, и быстрого возврата в режим захвата. Следовательно, система 201 управления транспортного средства и ECU 210 управления транспортного средства выполнены с возможностью подавления продолжения последующей идентификации поддерживающего связь транспортного средства для некорректного транспортного средства в режиме отслеживания и недопущения влияния некорректного распознавания для поддерживающего связь транспортного средства на последующее следящее управление.
[0118] Кроме того, система 201 управления транспортного средства согласно варианту осуществления, описанному выше, включает в себя ECU 210 управления транспортного средства, который служит в качестве устройства управления движением для управления замедлением основного транспортного средства на основе замедления другого транспортного средства, обнаруженного посредством переднего датчика 21a расстояния между транспортными средствами и ECU 21 переднего датчика, при возвращении из режима отслеживания в режим захвата в соответствии с результатом сравнения между информацией движения поддерживающего связь транспортного средства на основе информации связи другого транспортного средства, принимаемой посредством радиоантенны 24a и ECU 24 управления радиоантенны, и результатом обнаружения посредством переднего датчика 21a расстояния между транспортными средствами и ECU 21 переднего датчика.
[0119] Следовательно, даже в случае, если другое транспортное средство, которое отличается от другого транспортного средства, захваченного посредством переднего датчика 21a расстояния между транспортными средствами в режиме захвата, некорректно захватывается в качестве поддерживающего связь транспортного средства, система 201 управления транспортного средства и ECU 210 управления транспортного средства выполнены с возможностью надлежащего обеспечения расстояния между транспортными средствами, конкретно, между основным транспортным средством и другим транспортным средством, которое движется непосредственно впереди основного транспортного средства.
[0120] Система идентификации транспортного средства и устройство идентификации транспортного средства согласно каждому вышеупомянутому варианту осуществления изобретения не ограничены вышеупомянутыми вариантами осуществления и могут изменяться различными способами в пределах объема, описанного в формуле изобретения. Система идентификации транспортного средства и устройство идентификации транспортного средства согласно этому варианту осуществления могут быть сконфигурированы посредством надлежащего комбинирования компонентов каждого из вариантов осуществления, описанных выше.
[0121] Система идентификации транспортного средства, описанная выше, применяется к системе управления транспортного средства, которая является системой следящего управления, но изобретение не ограничено этим. В вышеприведенном описании, устройство идентификации транспортного средства и устройство управления движением используются посредством ECU 10 или 210 управления транспортного средства. Тем не менее, изобретение не ограничено этим. Например, устройство идентификации транспортного средства и устройство управления движением могут быть сконфигурированы независимо от ECU 10 или 210 управления транспортного средства и могут взаимно переносить сигнал обнаружения или сигнал приведения в действие либо такую информацию, как команда управления.
[0122] 1, 201 - система управления транспортного средства
10, 210 - ECU управления транспортного средства (устройство идентификации транспортного средства)
11, 211 - модуль идентификации транспортного средства
12, 212 - модуль управления движением
13 - модуль режима захвата
14 - модуль режима отслеживания
20 - CAN связи/системы датчиков
21 - ECU переднего датчика (устройство обнаружения)
21a - передний датчик расстояния между транспортными средствами (устройство обнаружения)
24 - ECU управления радиоантенны (устройство связи)
24a - радиоантенна (устройство связи)
30 - CAN системы управления
31 - ECU управления двигателем
32 - ECU управления тормозом
33 - ECU управления при рулении
215 - модуль определения некорректного распознавания
c1 - основное транспортное средство
c2, c3 - другое транспортное средство
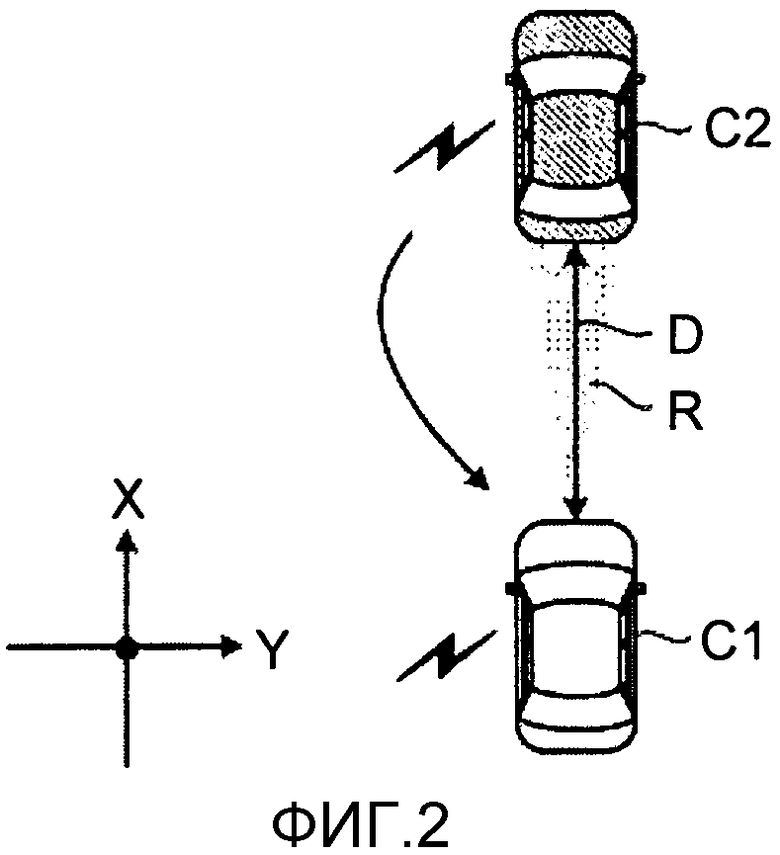
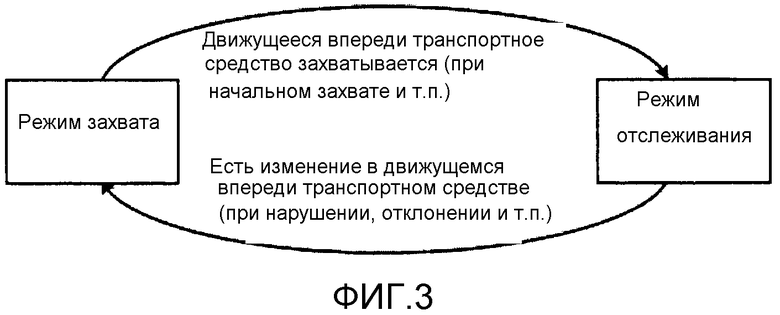
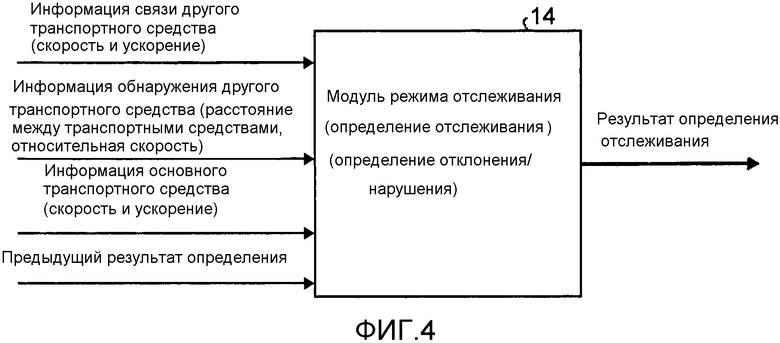
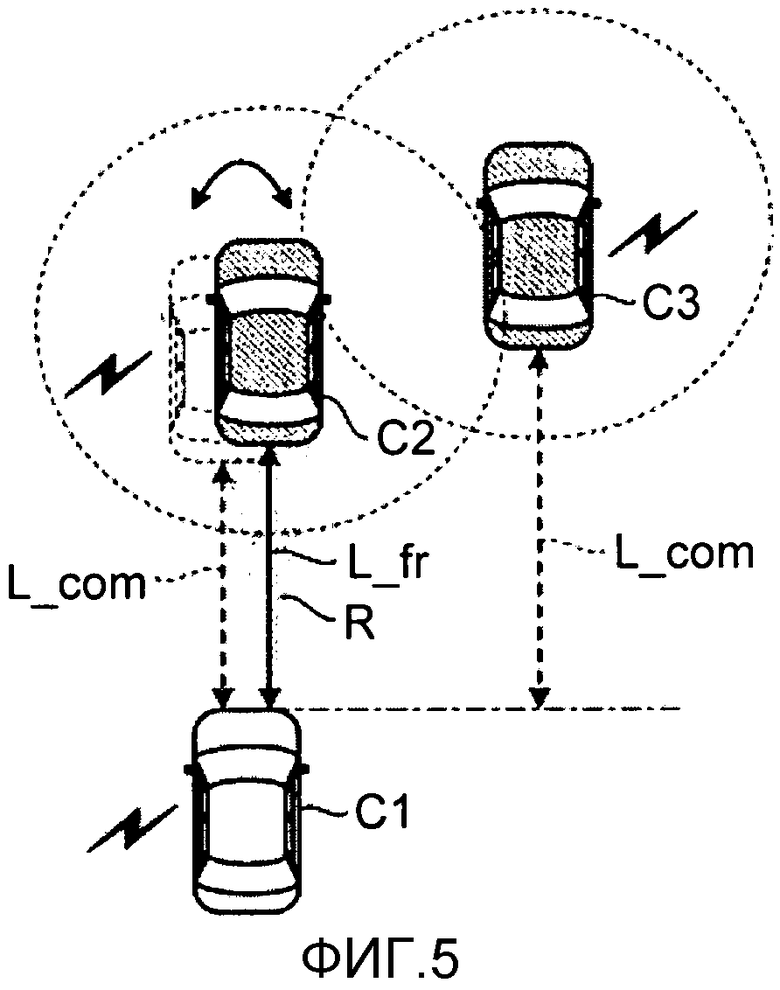
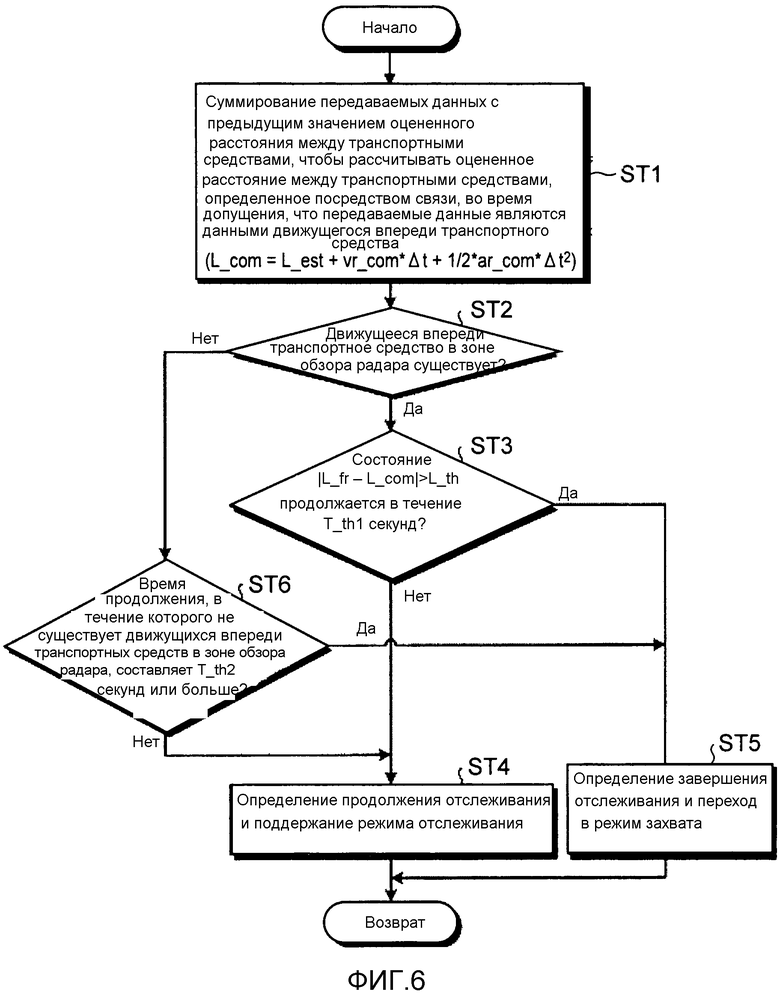
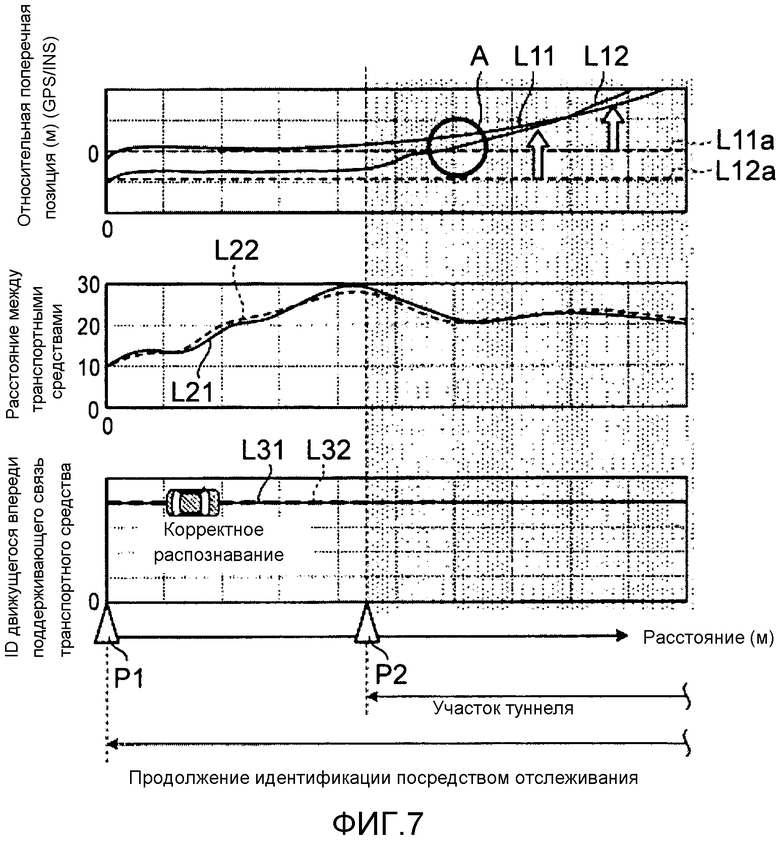
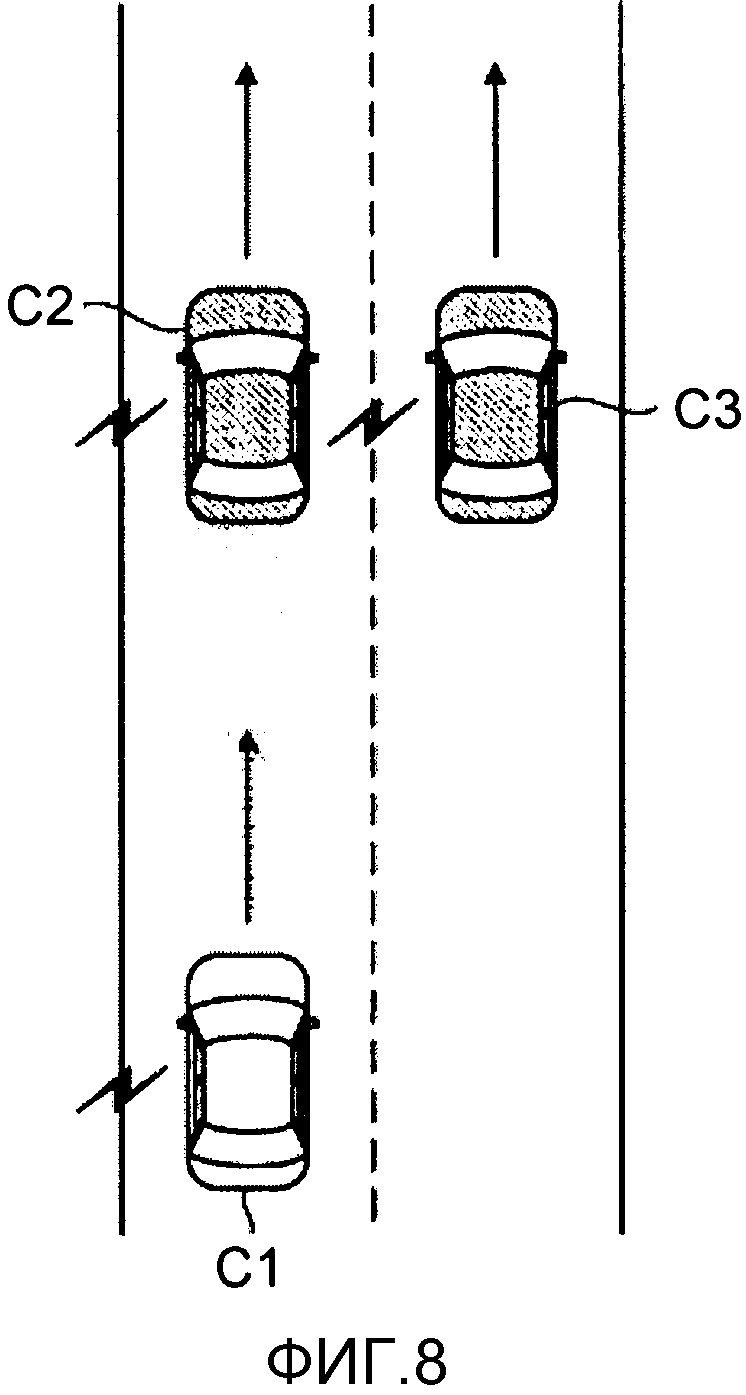
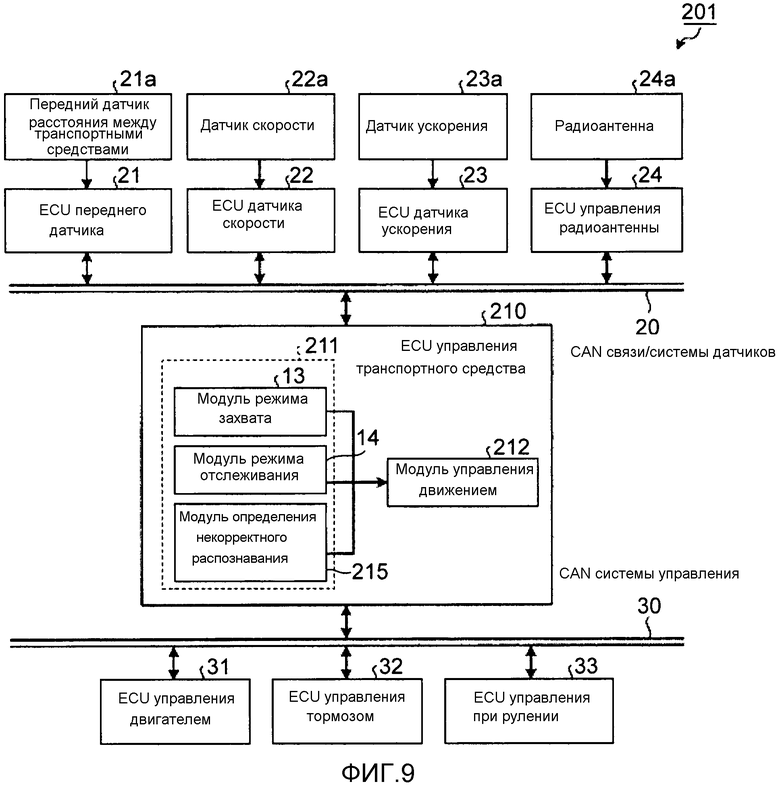
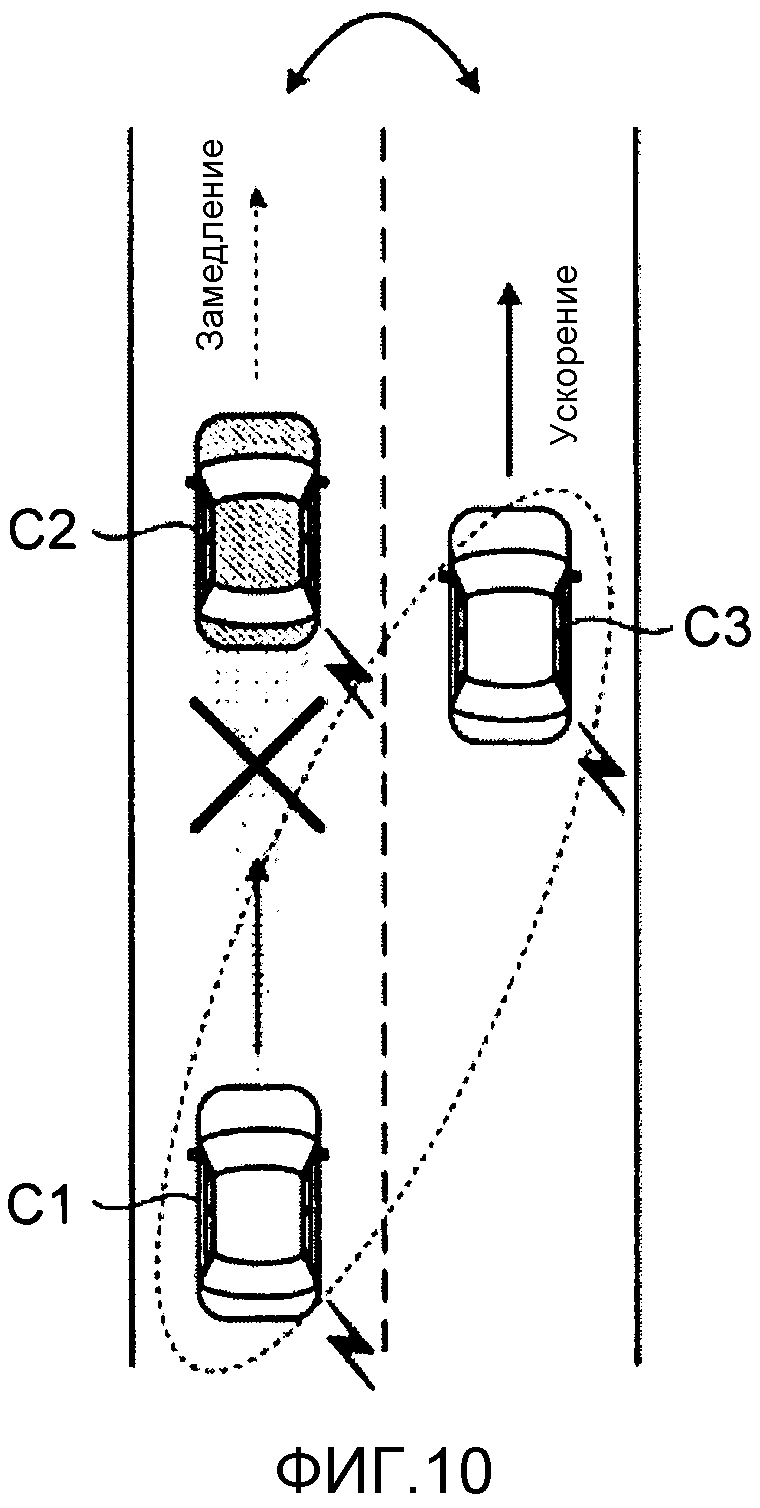
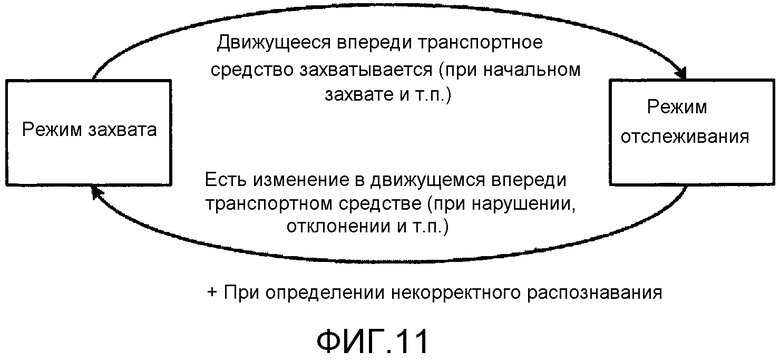
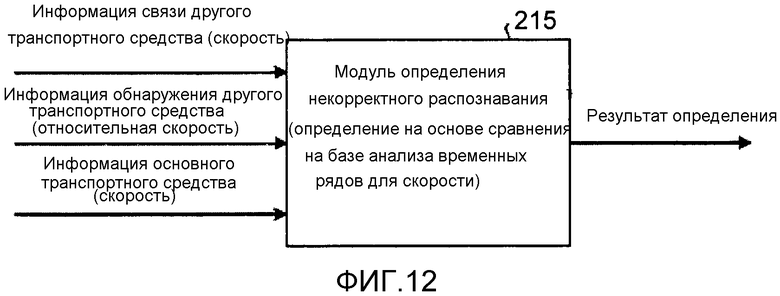
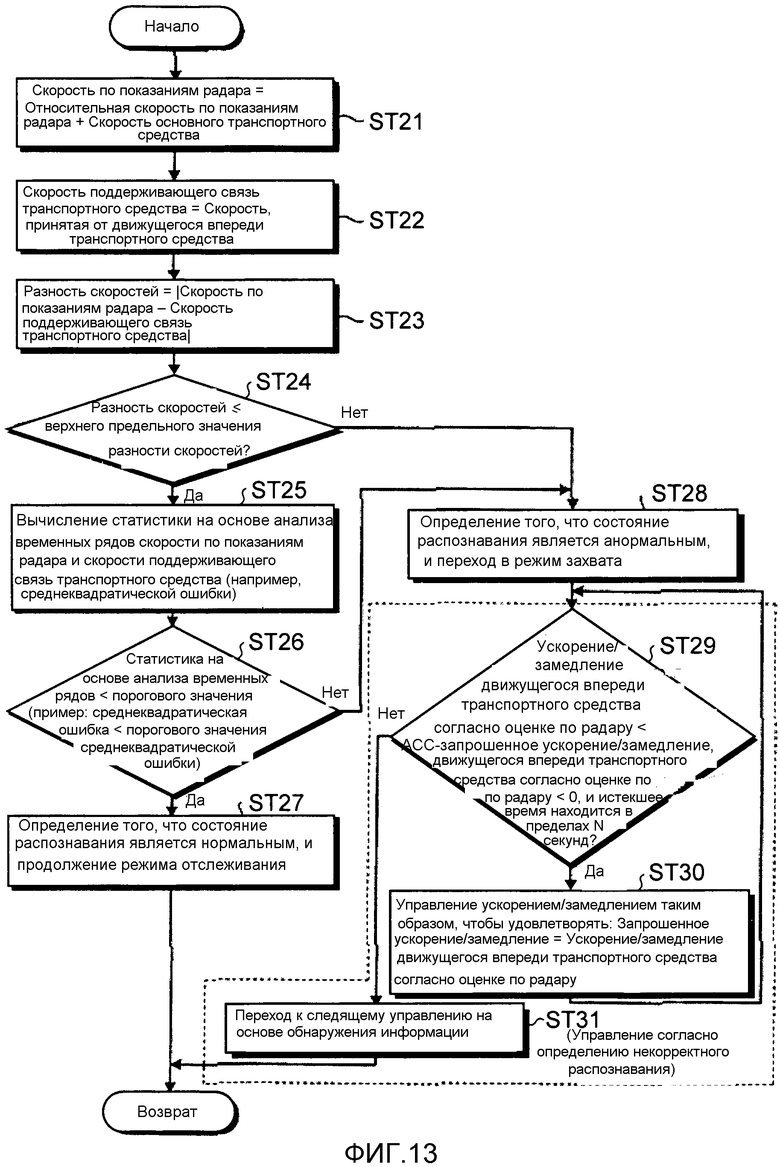
Изобретение относится к системе идентификации транспортного средства. Система идентификации транспортного средства содержит устройство связи, устройство обнаружения и устройство идентификации транспортного средства. Устройство связи принимает информацию другого транспортного средства, связанную с другим транспортным средством около основного транспортного средства. Устройство обнаружения обнаруживает другое транспортное средство около основного транспортного средства. Устройство идентификации транспортного средства идентифицирует передающее транспортное средство, передающее информацию другого транспортного средства, на основе информации другого транспортного средства, принимаемой посредством устройства связи, и результата обнаружения посредством устройства обнаружения. Устройство идентификации транспортного средства сконфигурировано с возможностью переключения между режимом захвата для захвата передающего транспортного средства и режимом отслеживания для идентификации передающего транспортного средства. Достигается повышение точности идентификации поддерживающего связь транспортного средства. 2 н. и 4 з.п. ф-лы, 13 ил.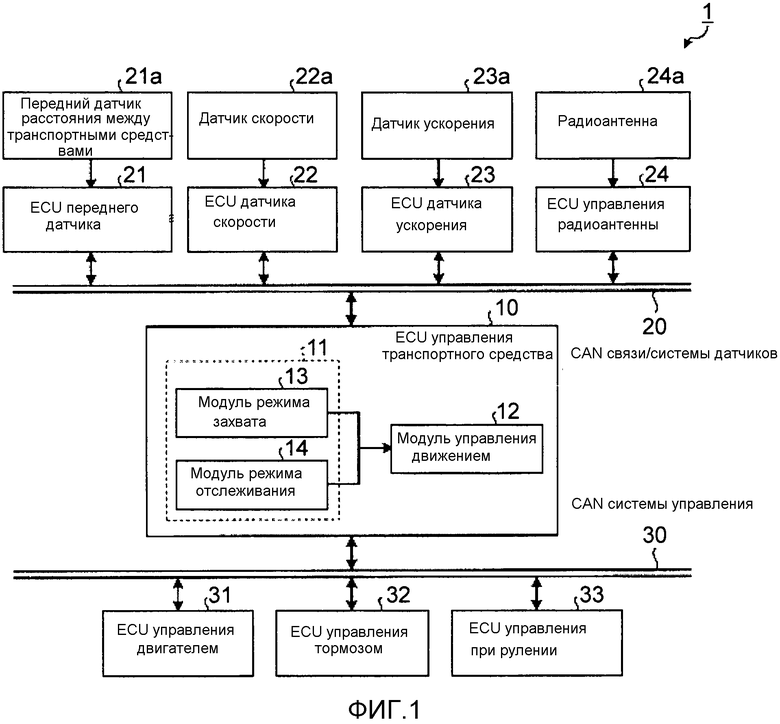
1. Система идентификации транспортного средства, отличающаяся тем, что она содержит:
- устройство связи, которое принимает информацию другого транспортного средства, связанную с другим транспортным средством около основного транспортного средства;
- устройство обнаружения, которое обнаруживает другое транспортное средство около основного транспортного средства; и
- устройство идентификации транспортного средства, которое идентифицирует передающее транспортное средство, передающее информацию другого транспортного средства, на основе информации другого транспортного средства, принимаемой посредством устройства связи, и результата обнаружения посредством устройства обнаружения, при этом:
- устройство идентификации транспортного средства сконфигурировано с возможностью переключения между режимом захвата для захвата передающего транспортного средства на основе информации другого транспортного средства, принимаемой посредством устройства связи, и результата обнаружения посредством устройства обнаружения, и режимом отслеживания для идентификации передающего транспортного средства на основе позиционной взаимосвязи между основным транспортным средством и передающим транспортным средством во время захвата в режиме захвата и информации движения, связанной с передающим транспортным средством на основе информации другого транспортного средства, принимаемой посредством устройства связи, после захвата в режиме захвата.
2. Система идентификации транспортного средства по п. 1, в которой:
- устройство идентификации транспортного средства захватывает передающее транспортное средство на основе информации абсолютной позиции, которая является информацией позиции, связанной с передающим транспортным средством на основе информации другого транспортного средства в режиме захвата, и идентифицирует, в режиме отслеживания, передающее транспортное средство на основе информации относительной позиции, которая является информацией позиции, связанной с передающим транспортным средством на основе опорной позиции, которая является позицией передающего транспортного средства во время захвата в режиме захвата, и информации движения, связанной с передающим транспортным средством.
3. Система идентификации транспортного средства по п. 2, в которой:
- устройство идентификации транспортного средства идентифицирует, в режиме отслеживания, передающее транспортное средство на основе информации относительной позиции, основанной на информации относительной позиции в прошлом в режиме отслеживания, и информации движения, связанной с передающим транспортным средством.
4. Система идентификации транспортного средства по любому из пп. 1-3, в которой:
- устройство идентификации транспортного средства возвращается, в режиме отслеживания, в режим захвата в соответствии с результатом сравнения между информацией движения, связанной с передающим транспортным средством на основе информации другого транспортного средства, принимаемой посредством устройства связи, и результатом обнаружения посредством устройства обнаружения.
5. Система идентификации транспортного средства по п. 4, дополнительно содержащая:
- устройство управления движением, которое управляет замедлением основного транспортного средства на основе замедления другого транспортного средства, обнаруженного посредством устройства обнаружения, во время возвращения из режима отслеживания в режим захвата в соответствии с результатом сравнения.
6. Устройство идентификации транспортного средства, отличающееся тем, что:
- устройство идентификации транспортного средства сконфигурировано с возможностью переключения между режимом захвата для захвата передающего транспортного средства, передающего информацию другого транспортного средства, связанную с другим транспортным средством около основного транспортного средства, принимаемую посредством устройства связи, на основе информации другого транспортного средства и результата обнаружения посредством устройства обнаружения, которое обнаруживает другое транспортное средство около основного транспортного средства, и режимом отслеживания для идентификации передающего транспортного средства на основе позиционной взаимосвязи между основным транспортным средством и передающим транспортным средством во время захвата в режиме захвата и информации движения, связанной с передающим транспортным средством на основе информации другого транспортного средства, принимаемой посредством устройства связи, после захвата в режиме захвата.
| JP 2008046873 A, 28.02.2008 | |||
| JP 2010086269 A, 15.04.2010 | |||
| JP 2001001791 A, 09.01.2001 |

