Изобретение относится к измерительной технике и может быть использовано для ограничения разворота корпуса преобразователя круговых вращений вала в код при его контроле или использовании в станках и приборах.
Для соединения валов фотоэлектрических, индуктивных, потенциометрических и других цифровых преобразователей кругового движения с валами вращающихся элементов приборов и станков обычно используются разнообразные компенсационные муфты, позволяющие компенсировать погрешности их взаимного расположения, такие как несоосность, перекосы, осевые и радиальные биения (см. С.М. Латыев Компенсация погрешностей в оптических приборах. Л.: Машиностроение, 1985, с.215-220).
Недостатком компенсационных муфт является то, что они передают движение с одного вала на другой с погрешностями, зависящими от значений погрешностей взаимного расположения валов, которые вызывают погрешности передачи вращения, часто превосходящих погрешности самих преобразователей, которые невозможно учесть.
Известно также устройство, состоящее из двух последовательно расположенных параллелограммных механизмов, фиксирующее статор (корпус) кругового измерительного преобразователя от разворотов относительно собственного вала с обеспечением других возможных его подвижек (см. Б.Н. Иванов. Фиксирующее устройство круговых измерительных преобразователей. Оптико-механическая промышленность, №6, 1984, с.49-51). Недостатком устройства является сложность конструкции и недостаточно высокая точность ограничения разворотов из-за большого количества кинематических звеньев устройства.
Наиболее близким по технической сущности является авторское свидетельство №1647224 на «Устройство для ограничения поворота статора преобразователя круговых перемещений». Устройство содержит основание с закрепленной на нем направляющей движения в виде направляющей вращения, установленный на направляющей вращения рычаг с закрепленной на нем стойкой, шарнирно связанный со стойкой параллелограммный механизм со сферическими шарнирами между его звеньями, пружины растяжения, попарно стягивающие элементы сферических шарниров, закрепленных соответственно на стойке и звене (шатуне) параллелограммного механизма, закрепленного на статоре преобразователя круговых перемещений, причем рычаг закреплен так, что его ось перпендикулярна плоскости параллелограммного механизма, а ось стойки, проходящая через центры сферических шарниров, параллельна оси направляющей вращения.
Данное устройство является более простым по сравнению с вышеописанным устройством с двумя параллелограммами и работает более точно, однако оно также обладает недостаточной точностью ограничения поворота статора преобразователя из-за погрешностей звеньев и шарниров параллелограммного механизма, входящего в его состав, и сложностью конструкции последнего. Задачей, на решение которой направлено предлагаемое изобретение, является повышение точности работы и упрощение конструкции устройства для ограничения поворота статора цифрового преобразователя круговых перемещений, что обеспечивается достижением технического результата за счет уменьшения числа кинематических звеньев устройства.
Технический результат достигается тем, что в устройстве для ограничения поворота статора цифрового преобразователя круговых перемещений, содержащем основание с направляющей движения, подвижную стойку, звено, закрепленное на статоре преобразователя, пружины, осуществляющие силовое замыкание звена и стойки, а также глухую муфту, соединяющую вал цифрового преобразователя с поворачивающимся валом исполнительного или исследуемого изделия, новым является то, что направляющая движения в основании выполнена в виде направляющей поступательного движения стойки, стойка имеет плоскую рабочую поверхность, замыкающуюся пружинами на два сферических наконечника, установленных на концах звена, закрепленного на статоре преобразователя, причем ось направляющей движения стойки перпендикулярна линии, проходящей через центры сферических наконечников.
Данное решение позволяет повысить точность работы и упростить конструкцию устройства за счет существенного уменьшения числа подвижных звеньев в его конструкции (исключить параллелограммный механизм со сферическими шарнирами) при одновременном обеспечении 5-и степеней подвижности корпусу преобразователя за исключением поворота вокруг оси собственного вала.
Сущность заявляемого изобретения поясняется фигурой. На ней изображено основание 1 с направляющей поступательного движения стойки 1, которая плоской рабочей поверхностью замыкается двумя пружинами растяжения 3 на сферические наконечники, которые могут быть выполнены в виде шаров 4, установленных на расстоянии L друг от друга в конические лунки на концах звена 5, как показано на виде А фигуры. Звено 5 закреплено на статоре 6 цифрового преобразователя, имеющего вращающийся вал 7. Вал 7 преобразователя соединен глухой муфтой 8 с вращающимся валом 9 исполнительного или исследуемого изделия 10. Основание 1 установлено так, что ось направляющей поступательного движения стойки 2 перпендикулярна линии, проходящей через центры сферических наконечников (шаров).
Устройство работает следующим образом. При вращении вала 9 исполнительного или исследуемого изделия 10 его поворот передается глухой муфтой 8 на поворот вала 7 преобразователя вокруг оси Z его статора 6. Возникающий на статоре 6 преобразователя момент вращения вокруг оси Z передается звеном 5 и сферическими наконечниками 4 на стойку 2 и основание 1. Реакция основания 1 на вращающий момент создает уравновешивающий реактивный момент, ограничивающий поворот статора 6 преобразователя вокруг оси Z.
Из-за радиальных и осевых биений подшипников преобразователя и исполнительного или исследуемого изделия, а также погрешностей глухой муфты и других причин статор 6 преобразователя при вращении вала 7 должен иметь 5 степеней свободы относительно неподвижной пространственной системы координат X, Y, Z. Для точного функционирования преобразователя необходимо ограничить разворот его статора 6 только вокруг оси Z (оси собственного вала 7), обеспечив возможность смещения вдоль этой оси, а также смещения и развороты относительно осей X, Y.
Благодаря тому что закрепленное на статоре преобразователя звено 5 замыкается пружинами растяжения 3 на плоскую рабочую поверхность стойки 2 через сферические шары 4, в двух точках контакта Р (вид А фигуры), являющимися кинематическими парами высшего класса, то эти кинематические пары отнимают у статора преобразователя только две степени свободы: поворот вокруг оси Z и смещение вдоль оси Х (см. Латыев С.М. Конструирование точных (оптических) приборов. СПб.: Политехника, 2007, с.33-35).
Но так как стойка может смещаться в направляющей основания 1 вдоль оси X, то рабочая поверхность стойки не ограничивает подвижность статора преобразователя вдоль этой оси. Таким образом, статор преобразователя обладает 5-ю степенями свободы относительно пространственных осей Z, X, Y, за исключением разворота вокруг оси Z.
Заявляемое устройство по сравнению с прототипом не содержит параллелограмма, вносящего погрешности в его работу, и имеет всего два кинематических сопряжения звеньев: звено 5, сопряженное через две высшие кинематические пары с плоской рабочей поверхностью стойки 2, и сопряжение стойки 2 с основанием 1 через направляющую поступательного движения. Известно (см. Справочник конструктора оптико-механических приборов под ред. В.А. Панова, Л. / Машиностроение 1980, с.456-490), что высшие кинематические пары обладают меньшими погрешностями по сравнению с низшими кинематическими парами в виде четырех сферических шарниров, по которым сопрягались звенья прототипа, поэтому точность заявляемого устройства будет существенно выше точности прототипа.
Изобретение относится к измерительной технике и может быть использовано для ограничения разворота статора цифрового преобразователя круговых перемещений при его контроле или использовании в станках и приборах. Устройство для ограничения разворота статора цифрового преобразователя круговых перемещений содержит основание с направляющей поступательного перемещения стойки, которая своей плоской рабочей поверхностью пружинами растяжения замыкается на два сферических наконечника, установленных на концах звена, закрепленного на статоре преобразователя, вал которого соединен глухой муфтой с валом исполнительного или исследуемого изделия. Устройство обеспечивает корпусу преобразователя пять степеней подвижности, кроме поворота вокруг оси собственного вала. Технический результат - повышение точности работы и упрощение конструкции устройства. 1 ил.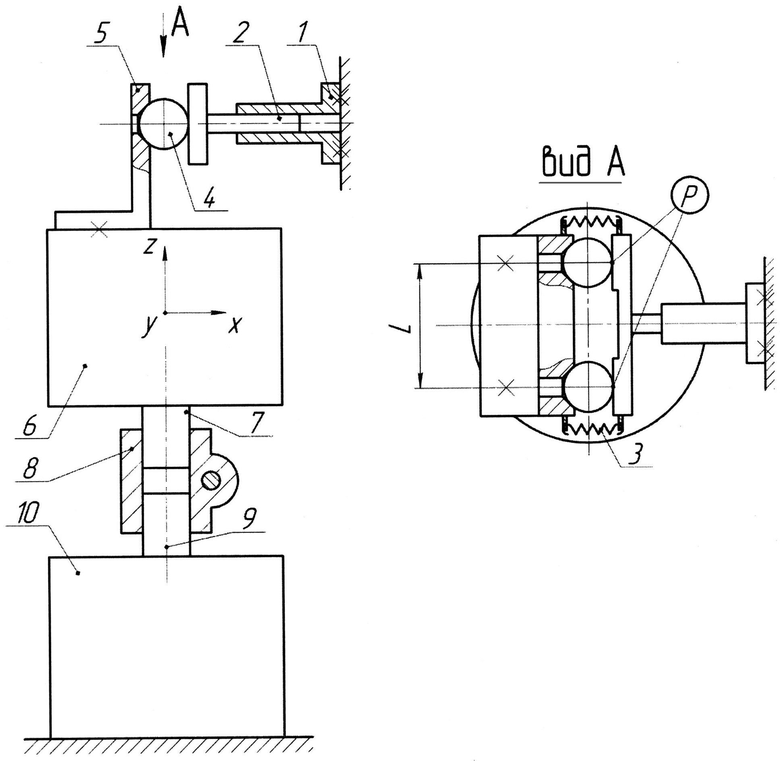
Устройство для ограничения поворота статора цифрового преобразователя круговых перемещений, содержащее основание с направляющей движения, подвижную стойку, звено, закрепленное на статоре преобразователя, пружины, осуществляющие силовое замыкание звена и стойки, а также глухую муфту, соединяющую вал цифрового преобразователя с валом исполнительного или исследуемого изделия, отличающееся тем, что направляющая движения в основании выполнена в виде направляющей поступательного движения стойки, стойка имеет плоскую рабочую поверхность, замыкающуюся пружинами на два сферических наконечника, установленных на концах звена, закрепленного на статоре преобразователя, причем ось направляющей движения стойки перпендикулярна линии, проходящей через центры сферических наконечников.
| Устройство для ограничения поворота статора преобразователя круговых перемещений | 1988 |
|
SU1647224A1 |
| Б.Н | |||
| Иванов "Фиксирующее устройство круговых измерительных преобразователей" | |||
| Оптико-механическая промышленность, N6, 1984, с.49-51 | |||
| С.М | |||
| Латыев "Компенсация погрешностей в оптических приборах" | |||
| Л, Машиностроение, 1985, с.215-220 | |||

