Устройство для контроля погрешности преобразователя поворота вала в код
Изобретение относится к системам автоматизированного контроля погрешностей преобразователей угла поворота вала в код, используемых в станкостроении и приборостроении.
Известны способы контроля и устройства, их реализующие, для измерения погрешностей цифровых преобразователей углов, описанные в книге Домрачева В.Г., Мейко Б.С. «Цифровые преобразователи угла. Принципы построения, теория точности, методы контроля», М., Энергоатомиздат, 1984, с. 199-200; 221-228. Недостатком известных устройств является то, что они построены на временном принципе измерений и содержат в своем составе привод для равномерного вращения вала преобразователя, что не позволяет добиться высокой точности контроля из-за невозможности создать равномерное движение.
Известно также устройство, реализующее способ поверки угла поворота вала в код (А.с. № 824265, кл. G08C 25/00, 23.04.81), содержащее образцовый преобразователь поворота вала в код, механизм для разворота корпуса образцового преобразователя, блок для соединения валов образцового и поверяемого преобразователей, блок для фиксации корпуса поверяемого преобразователя, привод для вращения валов контролируемого и образцового преобразователей, кинематически связанный с блоком регистрации, измерительный блок, на входы которого подаются электрические кодовые сигналы с поверяемого и образцового преобразователей. Устройство позволяет измерять погрешность поверяемого преобразователя путем регистрации и сравнения сигналов с образцового и поверяемого преобразователей при синхронном вращении их валов. Недостатком этого устройства является его сложность, обусловленная наличием механизма разворота корпуса образцового преобразователя и кинематической связи привода с блоком регистрации, а так же невысокая точность контроля из-за погрешности блока соединения валов контролируемого и образцового преобразователей.
Наиболее близким по технической сущности является устройство для измерения погрешности динамических гониометров, описанное в статье Иващенко Е.М., Павлова П.А. «Исследования динамических гониометров с оптическим датчиком угла». Измерительная техника, № 1, 2014, с. 25-27.
Устройство для контроля гониометра (цифрового преобразователя угла), преобразующего угол поворота его вала (шпинделя) в цифровой код, содержит образцовый преобразователь угла поворота (на основе многогранной призмы и автоколлимационного нуль-индикатора), блок сопряжения (в виде юстировочного столика) контролируемого и образцового преобразователей, персональный компьютер, связанный через электронный блок с выходом контролируемого цифрового преобразователя угла, выходом эталонного преобразователя угла и системой управления двигателем, приводящеи в синхронное движение вал цифрового преобразователя угла и многогранную призму эталонного преобразователя.
Недостаткам известного устройства является то, что использование в качестве образцового преобразователя многогранной призмы и автоколлиматора позволяет контролировать гониометр в ограниченном числе точек контроля, определяемым количеством граней призмы, что приводит к значительной методической погрешности измерений (см. Латыев С.М. «Конструирование точных (оптических) приборов», СПб, Политехника, 2007, с. 121-122). Для увеличения числа точек контроля в качестве образцового преобразователя можно было бы использовать более точный лазерный гониометр или прецизионный преобразователь угла поворота вала в код, которые широко выпускаются отечественной и иностранной промышленностью, например, фирмами СКБ ИС (Россия), Heidenhain (Германия), однако блок сопряжения известного устройства не позволяет соединять валы поверяемого и образцового преобразователей для их синхронного вращения.
Задачей, на решение которой направлено предлагаемое изобретение, является повышение точности контроля за счет уменьшения погрешностей измерения, что обеспечивается достижением технического результата, заключающегося в обеспечении возможности увеличения числа контролируемых положений преобразователя, а также благодаря исключению влияния погрешности блока сопряжения на результат контроля.
Технический результат достигается тем, что в устройстве для контроля цифрового преобразователя угла поворота вала в цифровой код, содержащем образцовый преобразователь угла поворота, блок сопряжения контролируемого и образцового преобразователей, персональный компьютер, связанный через электронный блок с выходом контролируемого цифрового преобразователя угла, выходом эталонного преобразователя угла и системой управления двигателем, приводящим в синхронное движение вал цифрового преобразователя угла и образцовый преобразователь, новым является то, что в качестве образцового преобразователя используется прецизионный преобразователь угла поворота вала в цифровой код, а блок сопряжения контролируемого и образцового преобразователей состоит из узла жесткого соединения валов образцового и контролируемого преобразователей, узла для ограничения поворота корпуса поверяемого или эталонного преобразователей с установленным на нем автоколлимационным зеркалом, угловое положение которого измеряется цифровым автоколлиматором, выход которого через электронный блок связан с персональным компьютером, причем узел ограничения поворота корпуса контролируемого или образцового преобразователей выполнен с обеспечением всех степеней свободы подвижности корпуса за исключением разворота вокруг оси собственного вала.
Данное решение позволяет измерять погрешность преобразователя фактически непрерывно во всем диапазоне его работы в положениях смены кодов контролируемого преобразователя, при синхронном вращении его вала с валом образцового преобразователя. Синхронность вращения достигается благодаря узлу жесткого соединения валов преобразователей (например, с помощью глухой муфты) и подвижности корпуса контролируемого или образцового преобразователя относительно всех степеней его свободы за исключением разворота вокруг оси вращения вала благодаря узлу ограничения поворота корпуса. Подвижность корпуса контролируемого или образцового преобразователя компенсирует погрешности измерений, возникающие из-за биений подшипников вращения, несоосности и перекосов валов преобразователей. Так как на узел ограничения поворота корпуса преобразователя установлено автоколлимационное зеркало, то с помощью автоколлиматора можно измерять погрешность работы этого узла в каждом контролируемом положении и вводить поправки в результат контроля. Таким образом, предлагаемое изобретение позволяет существенно повысить точность контроля преобразователей за счет исключения методической погрешности, обусловленной дискретностью измерений и компенсации инструментальной погрешности устройства, обусловленной погрешностью блока сопряжения поверяемого и образцового преобразователей.
Сущность заявляемого изобретения поясняется фигурой, на которой устройство для контроля погрешности преобразователя вала в код содержит прецизионный образцовый преобразователь 1, вал которого соединен глухой муфтой 2 с валом контролируемого преобразователя 3, корпус которого ограничен узлом 4 от поворота вокруг оси собственного вала. Узел ограничения поворота корпуса преобразователя 4 может представлять собой параллелограммный механизм со сферическими шарнирами, связывающими его с корпусом контролируемого преобразователя и рычажной планкой, ось поворота которой перпендикулярна плоскости параллелограммного механизма. На узле 4 установлено автоколлимационное зеркало 5, цифрового автоколлиматора 6 (например, выпускаемого фирмой ЛОМО «Оптический журнал», № 10, 2009, с. 42-47), выход которого соединен через электронный блок 7 с персональным компьютером 8. Синхронное вращение валов образцового 1 и контролируемого 3 преобразователей осуществляется двигателем 9, связанным через блок управления 10 и электронный блок 7 с персональным компьютером 8. С персональным компьютером 8 через электронный блок 7 связаны выходы контролируемого преобразователя 3 и прецизионного образцового преобразователя 1. Для того чтобы не нагружать подшипники прецизионного образцового преобразователя весом контролируемого преобразователя, в заявляемом устройстве может быть предусмотрено разгрузочное устройство 11, например, в виде груза со шкивом или пружины.
Устройство для контроля погрешности преобразователя вала в код работает следующим образом. При синхронном вращении валов контролируемого и образцового преобразователей их угловые положения определяются по кодам, вырабатываемым соответствующими преобразователями. В моменты смены кодов контролируемого преобразователя, поступающих через электронный блок в персональный компьютер, они сравниваются с поступающими в компьютер через электронный блок кодами прецизионного образцового преобразователя. Разность кодов определяет угловую погрешность контролируемого преобразователя без учета погрешности узла 4 ограничения поворота корпуса контролируемого преобразователя: Δyi=yki-yoi, где Δyi - погрешность контролируемого преобразователя в i-том контролируемом положении, yki - угловое положение вала по коду контролируемого преобразователя, yoi - угловое положение вала по коду образцового преобразователя. Так как погрешность работы узла 4, измеренная с помощью зеркала 5 и автоколлиматора 6, поступает в компьютер, то она учитывается в виде поправок в результат контроля: Δyi=yki - yoi+Δy4i, где Δy4i - угловая погрешность положения корпуса контролируемого преобразователя в i-том контролируемом положении.
Предлагаемое устройство позволяет контролировать преобразователи поворота вала в код фактически в неограниченном числе точек контроля, компенсировать погрешность блока сопряжения контролируемого и образцового преобразователей, что существенно повышает точность осуществляемого контроля.
| название | год | авторы | номер документа |
|---|---|---|---|
| АБСОЛЮТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА (ВАРИАНТЫ) | 2009 |
|
RU2419067C2 |
| Устройство для контроля двугранных отражателей | 1990 |
|
SU1778518A1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2650425C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПОВОРОТА ОБЪЕКТА И ДВУХКООРДИНАТНЫЙ АВТОКОЛЛИМАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2828450C1 |
| ЦИФРОВОЙ ДВУХКООРДИНАТНЫЙ ДИНАМИЧЕСКИЙ АВТОКОЛЛИМАТОР | 2008 |
|
RU2437058C2 |
| Устройство для контроля преобразователейуглА пОВОРОТА ВАлА B КОд | 1979 |
|
SU842916A1 |
| СПОСОБ КАЛИБРОВКИ ОПТИКО-ЭЛЕКТРОННОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2635336C2 |
| ДАТЧИК УГЛА ПОВОРОТА | 2017 |
|
RU2644994C1 |
| Способ поверки преобразователей угла поворота вала в код | 1978 |
|
SU781875A1 |
| УНИВЕРСАЛЬНЫЙ МЕТРОЛОГИЧЕСКИЙ ГЕОДЕЗИЧЕСКИЙ СТЕНД | 2006 |
|
RU2362978C2 |
Изобретение относится к устройству для контроля погрешности преобразования угла поворота вала в код. Устройство содержит образцовый преобразователь поворота вала в код, блок сопряжения контролируемого и образцового преобразователей, состоящий из узла жесткого соединения валов образцового и контролируемого преобразователей, узла для ограничения поворота корпуса контролируемого или образцового преобразователей с установленным на нем автоколлимационным зеркалом, угловое положение которого измеряется цифровым автоколлиматором. Выход автоколлиматора и выходы контролируемого и образцового преобразователей через электронный блок связаны с персональным компьютером. Узел ограничения поворота корпуса контролируемого или образцового преобразователей обеспечивает корпусу все степени свободы подвижности за исключением разворота вокруг оси собственного вала и может быть выполнен в виде параллелограммного механизма со сферическими шарнирами. Технический результат - обеспечение возможности увеличения числа контролируемых положений преобразователя.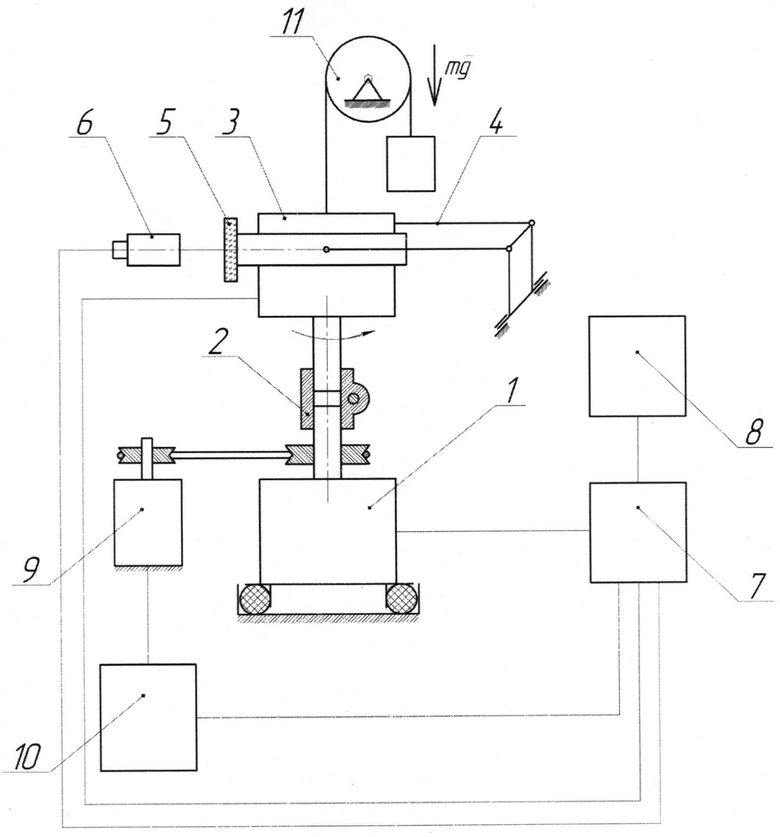
Устройство для контроля погрешности преобразователя угла поворота вала в код, содержащее образцовый преобразователь угла поворота, блок сопряжения контролируемого и образцового преобразователей, персональный компьютер, связанный через электронный блок с выходом контролируемого цифрового преобразователя угла, выходом эталонного преобразователя угла и системой управления двигателем, приводящим в синхронное движение вал цифрового преобразователя угла и образцовый преобразователь, отличающийся тем, что в качестве образцового преобразователя используется прецизионный преобразователь угла поворота вала в цифровой код, а блок сопряжения контролируемого и образцового преобразователей состоит из узла жесткого соединения валов образцового и контролируемого преобразователей, узла для ограничения поворота корпуса поверяемого или эталонного преобразователей с установленным на нем автоколлимационным зеркалом, угловое положение которого измеряется цифровым автоколлиматором, выход которого через электронный блок связан с персональным компьютером, причем узел ограничения поворота корпуса контролируемого или образцового преобразователей выполнен с обеспечением всех степеней свободы подвижности корпусу за исключением разворота вокруг оси собственного вала.
| ДАТЧИК КРУТЯЩЕГО МОМЕНТА | 2007 |
|
RU2334962C1 |
| CN102128645 A 20.07.2011 | |||
| Устройство для аттестации преобразователей угла поворота в код | 1978 |
|
SU694884A1 |
| CN102798409 A 28.11.2012 | |||
| KR 100820677 B1 11.04.2008 | |||

