Изобретение относится к машиностроению, может быть использовано в мускульных приводах медтехники, транспорта и стационарных потребителях вращательного движения.
В соответствии с эргономикой мускульный привод следует рассматривать как систему «человек - машина», взаимно оказывающих влияние друг на друга на друга. Поэтому эффективность этой системы характеризуется не только КПД машины, но и такими, как ритмичность работы, утомляемость, продолжительность периода работы без утомления. «Механическая работа мышцы, так же как и работа в механизме, измеряется произведением веса поднятого груза на величину укорочения мышцы» [1, с.217]. А это уже биология, физика, антропология, анатомия, физиология мышечной и нервной системы, химия.
Для усовершенствования мускульного привода необходимо выявить, правильно оценить и учесть влияющие факторы этих наук на мышцы человека, чтобы определить постановку и путь решения задачи. При этом обнаружилась «недостаточность наших знаний на то, как на самом деле работают мостики» в мышцах. А… «биология, физика и химия настолько слиты воедино, что между ними нет границ - для специалистов, изучающих различные аспекты преобразования биологическими системами химической энергии в механическую работу» [2, с.6].
Но в литературе даны и полезные выводы, которые целесообразно использовать при создании более эффективного мускульного привода. «Работоспособность зависит прежде всего от величины самой мышечной деятельности. Когда мышцы сокращаются максимально, она утомляется скорее, чем в случае субмаксимальных сокращений. При субмаксимальной деятельности мышцы могут работать продолжительное время без утомления». «Работа мышцы оптимальна, когда подобран соответствующий груз, не слишком большой и не слишком малый.»…» Количество работы мышц в значительной мере зависит от ритма работы» [1, с.223].
Понятие ритма работы в рассматриваемом вопросе - это своевременное изменение по величине, времени и местоположению мускульной силы (P) от незначительной в зоне «отдыха» до субмаксимальной в зоне «рабочей».
Примеров, подтверждающих вышеизложенное, в биологии множество. Это кратковременная атака гепарда и бег стайера, это продолжительный многокилометровый бег волка и марафонца, это волнообразный полет птицы с чередующимися циклами работы крыльев и отдыха (ритм полета). Предоставление мускульному приводу периодически создавать или удлинять интервал отдыха мускульной силе (P) увеличит продолжительность периода работы без утомления.
Аналогом выбран мускульный привод на заднее колесо коляски цепной с ручной кареткой [3]. Сходными признаками аналога и изобретения является устройство в узле (1) на приводном валу (7) через обгонную муфту (8) приводной звездочки (6) с цепной передачей. КПД узла порядка 98%.
Недостатком этого привода является потеря части КПД при вращении каретки из-за уменьшения тягового усилия по кривой зависимости около условных мертвых точек. «Активно изменять свою длину мышцы могут только в сторону укорочения» [2, с.6].
Работа мускульных мышц по кругу каретки малоэффективна, ведет к сбою ритма работы мышц, подключению работе других маломощных мышц, которые будут испытывать интенсивность работы выше средней. «Это ведет к повышенному кислородному запросу мышцами, повышенному запросу мышцами гликогена - основного энергетического субстрата, повышенному накоплению в мышечной ткани лактата с выделением его в кровь. Т.е. приводит к уменьшению работоспособности мышц, к их утомлению. А мышечное утомление - это уменьшение силы сокращения мышц, что обуславливает последующие витки более выраженного утомления работающих мышц» [4, с.73-78].
Из медицинской литературы [5, с.81-88] по физиологии человека известно, что для развития силы сокращения мышцы необходимо определенное время. Нарастание силы сокращения мышцы происходит сначала по крутой, а затем плавной кривой. Достигнув субмаксимальной интенсивности и произведя работу (зона работы), мышце требуется отдых (зона отдыха). Это, по-видимому, обуславливается внутримышечными законами преобразования химического топлива в мускульную силу.
КПД мышцы, работающей на химическом топливе, до 50%. Это выше, чем у паровой машины - 15%, бензинового двигателя - 20%, двигателя Дизеля - 37% [1, с.219].
Сам факт такого высокого энергосодержания в химическом топливе мускульных мышц предопределяет поиск путей их эффективного использования и, в первую очередь, в усовершенствованных для этой цели мускульных приводах.
Наглядно закономерности ритма мускульного привода, особенно его недостатки, просматриваются на примере гребли на лодке. Субмаксимальное усилие гребцов достигается в конце гребка веслами, а максимальное КПД гребка - при перпендикулярном положении весла по отношению к лодке. Подобное несоответствие проявляется в мускульном приводе при наличии в его узлах кривошипно-шатунного механизма или каретки. Устранить такое несоответствие в мускульном приводе ставится задачей при разработке узла (4).
Прототипом выбран мускульный привод, выпускаемый промышленностью для кресла колясного [6]. Сходными признаками прототипа и изобретения является узел (2), воспринимающий мускульную силу через рукоятку (13), рычаг (12) и шатун (14). При правильной геометрии построения этого узла КПД его высок. Для достижения максимального КПД в узле необходимо, чтобы перемещение шатуна (14) происходило параллельно действующей силе (P), а приложение силы (P) к рычагу (12) в середине его положения было перпендикулярным.
Неэффективным в прототипе является передача мускульного усилия (P) на приводной вал кривошипно-шатунным механизмом. Этот недостаток подобен недостатку аналога, хотя и в разных узлах - изменение тягового усилия от максимума до нуля около условных мертвых точек по кривой зависимости.
В основу изобретения поставлена задача увеличить КПД и продолжительность периода работы без утомления мускульного привода путем разработки новой конструкции эффективного узла с прямоугольной эпюрой КПД.
Поставленная задача решается мускульным приводом, который содержит (сходные существенные признаки изобретения с прототипом) раму (5) и укрепленные на ней, по крайней мере, одну приводную звездочку (6) или шкив, соединенную с приводным валом (7) через обгонную муфту (8) и другую опорную (16), огибаемых противолежащими ветвями гибкой тяги, например цепи (9, 10), с расположенным между ними совершающем возвратно-поступательные движения шатуном (14), установленным на рычаге (12) с рукояткой (13). На шатуне (14) укреплены (отличительные существенные признаки изобретения, достаточные во всех случаях) консоли (19), а на них установлены охватывающие противолежащие ветви цепи (9, 10) по одному ограничителю (20, 21) и по одной звездочке (22, 23) с трещоткой (24, 25) (она же обгонная муфта), попеременно замыкающимися при изменении направления хода шатуна (14).
Такой вывод основывается на нижеизложенном.
Введем понятие «субмертвая зона» мускульного привода. Зона неопределенной величины, примыкающая к мертвой точке механизма, узла, обладающая специфическими свойствами, качествами, обычно отрицательными.
На практике широко используются кривошипно-шатунные механизмы или ручные каретки. В первом случае в субмертвой зоне КПД падает до нуля. Возросшее сопротивление частично воспринимается человеком возрастанием сопротивления внешней среды, которое он пытается преодолеть увеличением интенсивности работы мускульной силы. Это ведет к неоправданному затратному увеличению прилагаемого усилия.
Во втором случае уменьшается КПД работы основных, самых сильных сократительных мышц из-за их непредназначения выполнять круговые рабочие движения и подключению к работе других групп мышц, более слабых, чем основные, что ведет к утомлению. А «в состоянии утомления человек не способен поддерживать требуемый уровень интенсивности или вынужден отказаться от ее продолжения [1, с.223]. В любом случае попадание в субмертвую зону нежелательно. Наилучший выход - исключить ее из общей схемы мускульного привода.
Теперь обозначился следующий этап нахождения решения задачи - в мускульный привод, содержащий эффективные узлы (1, 2, 3), добавить недостающий узел (4), соединить совершающий движение взад-вперед шатун (14) с противолежащими ветвями цепи (9, 10) от узла (1) так, чтобы:
1) крутящий момент на приводном валу (7) не менял своего направления;
2) не было холостого хода у рукоятки (13) «на себя» или «от себя»;
3) сохранить «прохождение заднего колеса»;
4) создать благоприятное условие для более эффективного использования химической энергии мускульных мышц путем:
а) исключения из амплитуды движения шатуна (14) субмертвых зон;
б) обеспечение постоянства КПД на всем пути движения шатуна (14);
в) возможного размещения зон «отдыха» и «работы» мускульных мышц по всей длине хода шатуна (14) с переменным ритмом чередования их продолжительности.
В разработке изобретения с использованием Интернета и макетирования было множество узлов с использованием разных видов гибкой связи, захватов, переключателей. Большинство узлов было отклонено из-за невозможности конструктивной стыковки между узлами (1) и (2) из-за ненадежности в работе, выявившейся при испытании моделей узлов (заклинивания, утыкание зубьев звездочек и др.).
В конечном итоге из осколков идей в разных пробных узлах был разработан узел (4), удовлетворяющий все ранее предъявляемые требования.
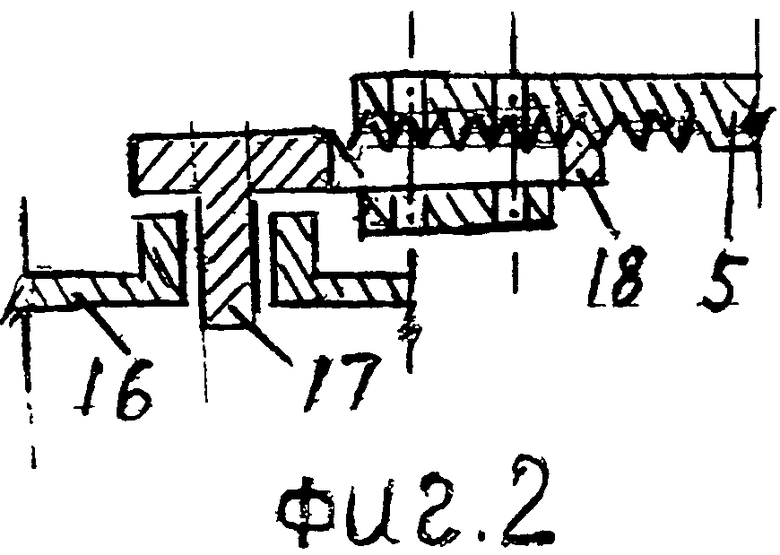
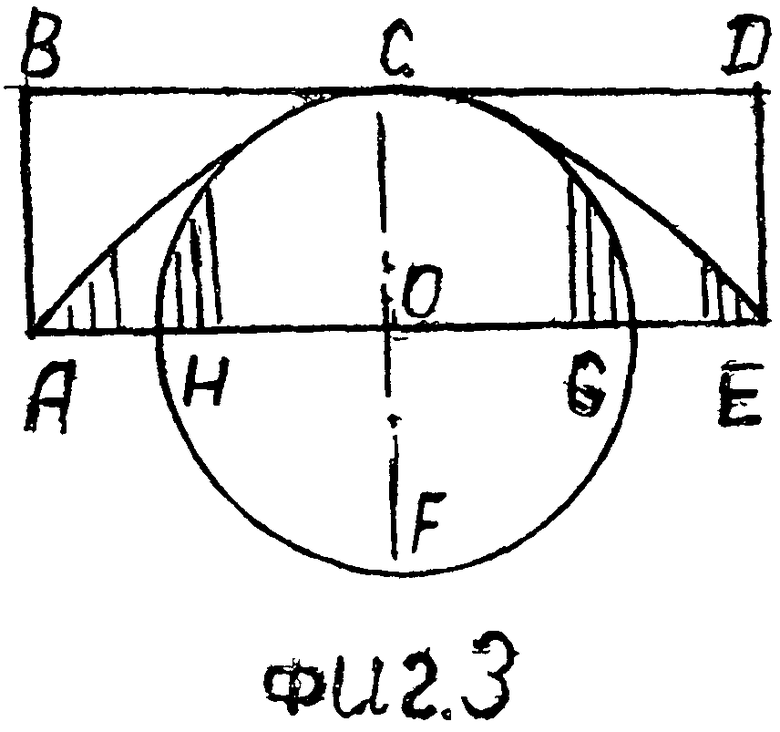
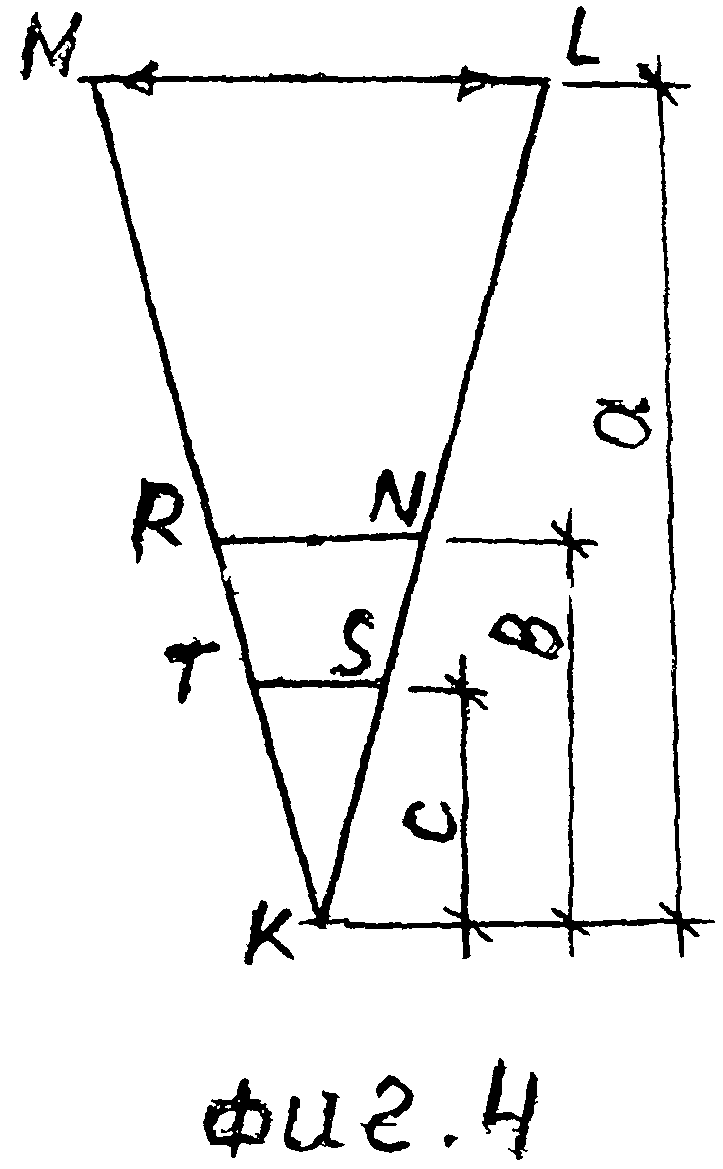
На фиг.1 изображена схема мускульного привода, на фиг.2 - сечение А-А фиг.1, на фиг.3 - эпюры КПД, на фиг.4 - расчетная схема узла (2).
На фиг.1 изображена схема мускульного привода из 4 узлов (1, 2, 3, 4), укрепленных на раме (5). Узел (1) содержит, по крайней мере, одну приводную звездочку (6), соединенную с приводным валом (7), через обгонную муфту (8), огибаемые противолежащими ветвями цепи (9, 10).
Узел (2) содержит укрепленный на оси (11) совершающий обратно-поступательные движения рычаг (12) с рукояткой (13) и ползун (14), соединенный с рычагом (12) осью (15).
Узел (3) содержит опорную звездочку (16) на оси (17), укрепленную на планке (18) для натяжения противолежащих ветвей цепи (9, 10).
Узел (4) содержит прикрепленные к шатуну (14) консоли (19), на которых укреплены, охватывая противолежащие ветви цепи (9, 10), по одному ограничителю (20, 21) и по одной звездочке (22, 23) с трещоткой (24, 25) или обгонной муфтой, попеременно замыкающимися и размыкающимися при изменении направления хода шатуна (14).
Подтягивая (или нажимая) рукоятку (13) рычага (12), мускульное усилие (P) передается на шатун (14), придавая ему, а также консолям (19) с укрепленными на них ограничителями (20, 21) и звездочками (22, 23), возвратно-поступательные движения вдоль противолежащих ветвей цепи (9, 10).
При движении шатуна (14) влево замыкается звездочка (22) с трещоткой (24) и передвигает противолежащую ветвь цепи (9) влево, создавая на приводной звездочке (6) крутящий момент (M) против часовой стрелки.
При движении шатуна (14) вправо звездочка (22) размыкается с трещоткой (24), а замыкается звездочка (23) с трещоткой (25) и передвигает противолежащую ветвь цепи (10) вправо, а через опорную звездочку (16) опять же передвигает ветвь цепи (9) влево, создавая на приводной звездочке (6) крутящий момент (M) также против часовой стрелки.
Так мускульная сила (P) при возвратно-поступательном движении шатуна (14) преобразуется в крутящий момент (M) постоянного направления на звездочке (6) против часовой стрелки и передается через обгонную муфту (8) на приводной вал (7).
На фиг.3 изображены эпюры КПД прототипа и изобретения. При равенстве радиусов OC=5 см кривошипно-шатунного механизма прототипа и ведущей звездочки (6) изобретения сравниваемые максимальные ординаты эпюр КПД равны: OC=AB=DE
HCG - эпюра КПД прототипа
ACE - развернутая эпюра HCG
AE=0,5пHG
ABDE - эпюра КПД узла (4) изобретения.
Эпюра ABDE в любом случае перекрывает эпюру прототипа HCG. И чем ближе к субмертвой зоне (к мертвым точкам A и E) будет прилагаться субмаксимальное усилие, тем больше будет проявляться эффект увеличения КПД изобретения по отношению к прототипу. А из наблюдений в природе - на лодке максимальное усилие гребцов, высшая часть траектории полета птицы и др. - можно заключить, что в мускульном приводе максимальное усилие, регулируемое ритмом работы, достигается мышцей и наступает по времени во второй половине хода шатуна (14).
Следовательно, мускульное усилие (P) в изобретении в узле (4) (ордината AB) всегда будет полностью преобразована во вращательный момент на ведомой звездочке (6), тогда как в субмертвой зоне (около точек A и E) прототипа КПД падает до нуля.
К техническому результату изобретения можно отнести эффект функционально-удобной смены движения рук на противоположное в любой точке цикла работы и без в мертвых точек A и E.
На фиг.4 изображена расчетная схема при применении узла (2) прототипа в изобретении. ML=34 см - общепринятое перемещение мускульной силы (P) по антропологическим соображениям.
TC=10 см - перемещение шатуна прототипа.
RN=10×0,5п=15,7 см - перемещение шатуна (14) изобретения.
a=71,4 см - размер прототипа;
b=0,5п×21=33 см = размер изобретения;
c=21 см - размер прототипа.
ML=LM=P
RN=NR=P×a/b - усилие на шатун (14) от силы (P);
P - мускульное усилие на рукоятку (13);
a, b, c - длина рычагов сил;
Q=RN×r/l;
Q - поперечная сила от звездочек (22, 23) на ветви цепи (9, 10) в их плоскости;
r - радиус приводной звездочки (6);
l - длина шатуна.
Поперечная сила Q может восприниматься ветвями цепи (9, 10) или дополнительно установленной направляющей известным способом. Если в изобретении ожидаемое увеличение продолжительности периода работы без утомления подтвердится и увеличится в пределах 120-150%, например, испытанием опытной полезной модели, то востребованность такого мускульного привода значительно возрастет. А дальнейшее более рациональное использование химического топлива мускульными мышцами будет означать увеличение земных энергетических ресурсов без дополнительных затрат.
Изготовление всех элементов узлов изобретения не представляет сложности и может быть серийным. Наиболее сложными в изготовлении можно считать трещотки (24, 25), установленные на консолях (19), но подобное решение уже серийно освоено промышленностью, например ключи накидные трещоточные разных размеров.
К техническому результату можно отнести «расширение ассортимента технических средств определенного назначения». Но они по данной заявке слишком многочисленны, чтобы изложить все. Это применимость в нескольких областях техники на территории всего земного шара. Это экология, напольный транспорт в малых и крупных городах. А также в отдаленных малонаселенных районах, где есть необходимость использования дополнительной электроэнергии, возобновляемой мускульной энергией. Использование изобретения возможно здоровым населением планеты и инвалидами.
Так как изобретение расширяет область применения оборудования медтехники, то в соответствии с Правилами [7] к новым свойствам технического результата можно отнести решение вопросов:
- вспомогательных услуг (7, правило 4);
- занятости (7, правило 7);
- поддержание доходов и социальное обеспечение (7, правило 8);
- отдыха и спорта (7, правило 11) и ряда других.
«Государствам следует поддерживать разработку, производство, распределение и обслуживание вспомогательных устройств и оборудования и распространение о них информации (7, правило 4 п.2)».
Литература
1. Беретов И.С. Общая физиология мышечной и нервной системы. - М.: Медгиз, 1959, с.219-223.
2. Бэгшоу К. Мышечные сокращения. - М:. Мир, 1985, с.6.
3. Патент RU N 2000094, кл. A61G 5, публ. 07.09.93.
4. Виноградова О.Л. и др. Расход мышечного гликогена при кратковременной работе высокой интенсивности в зависимости от его исходного содержания. Физиология человека. 1991, т.17, №3, с.73-78.
5. Коряк Ю.Л. Сократительные свойства передней большеберцовой мышцы у спортсменов разных специализаций и неспортсменов. Физиология человека. 1991, т.17, №2, с.82-88.
6. Кресло колясное ДККС-2-07. Паспорт ДАУ 2.945.062 ПС Кировоград.
7. Стандартные правила обеспечения равных возможностей для инвалидов. Резолюция 48/96 Генеральной Ассамблеи ООН. 20 декабря 1993 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2392166C1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2100240C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1998 |
|
RU2131820C1 |
| Канатная дорога | 1991 |
|
SU1796512A1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА И/ИЛИ МУСКУЛЬНОГО ТРЕНАЖЕРА (ВАРИАНТЫ) | 2012 |
|
RU2533870C2 |
| ПРИВОД ВЕДУЩЕГО КОЛЕСА ДОРОЖНО-ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2739643C1 |
| "Устройство "Дворянидова" для приведения в действие колесных транспортных средств" | 1990 |
|
SU1796530A1 |
| ВОДНЫЙ ВЕЛОСИПЕД | 2013 |
|
RU2520849C1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2373100C1 |
| ВОДНЫЙ ВЕЛОСИПЕД | 2013 |
|
RU2532991C2 |
Изобретение относится к мускульному приводу. Мускульный привод содержит раму и укрепленные на ней, по крайней мере, одну приводную звездочку или шкив, соединенную с приводным валом через обгонную муфту, и другую опорную звездочку, огибаемые противолежащими ветвями гибкой тяги, например, цепи с расположенным между ними совершающим возвратно-поступательные движения шатуном, установленным на рычаге с рукояткой для приложения мускульной силы. Привод содержит узел, в котором на шатуне укреплены консоли, на них установлены охватывающие противолежащие ветви цепи по одному ограничителю и по одной звездочке с трещеткой как обгонной муфтой, попеременно замыкающимися при изменении направления хода шатуна. Обеспечивается более равномерное распределение мускульных усилий по ходу рукоятки и увеличение КПД привода. 4 ил.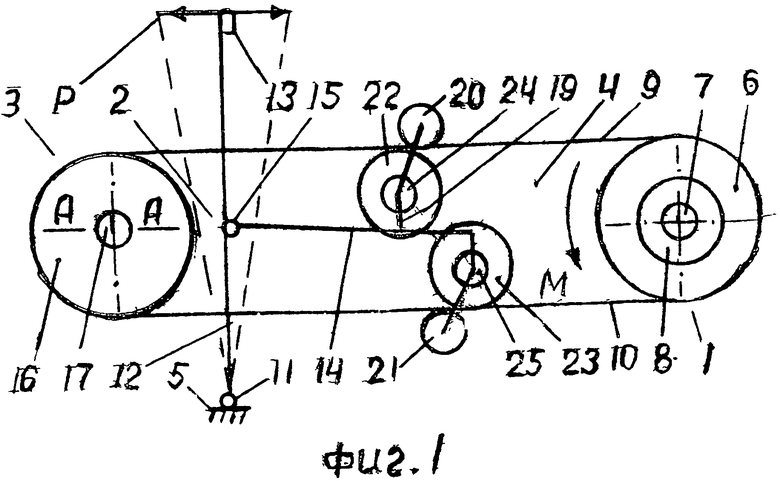
Мускульный привод, содержащий раму (5) и укрепленные на ней, по крайней мере, одну приводную звездочку (6) или шкив, соединенную с приводным валом (7) через обгонную муфту (8), и другую опорную звездочку (16), огибаемые противолежащими ветвями гибкой тяги, например цепи (9, 10), с расположенным между ними совершающем возвратно-поступательные движения шатуном (14), установленным на рычаге (12) с рукояткой (13) для приложения мускульной силы (Р), отличающийся тем, что содержит узел (4), в котором на шатуне (14) укреплены консоли (19), на них установлены охватывающие противолежащие ветви (9, 10) цепи по одному ограничителю (20, 21) и по одной звездочке (22, 23) с трещеткой (24, 25) как обгонной муфтой, попеременно замыкающимися при изменении направления хода шатуна (14).
| US 4925200 A, 15.05.1990 | |||
| Способ получения триметилентетрамочевины | 1975 |
|
SU569563A1 |
| US 5322312 A, 21.06.1994 | |||
| US 5683321 A, 04.11.1997 | |||
| ТРАНСПОРТНОЕ СРЕДСТВО | 1992 |
|
RU2049013C1 |

