Изобретение относится к устройствам для приведения в действие колесных транспортных средств мускульной силой человека, в частности к мускульным приводам с возвратно-поступательно движущимися ножными педальными элементами, преимущественно для веломобилей.
Известен мускульный привод транспортного средства (патент Германии DE 10139925, МПК В62М 1/04, 2002), содержащий ведомую и ведущую звездочки, охваченные замкнутой цепной передачей, муфту свободного хода, связанную со звездочками цепной передачи, закрепленными на раме, педальные элементы, выполненные с возможностью вертикального перемещения относительно дорожного полотна за счет силы тяжести человека, при этом педальные элементы соединены с механическим приводом, представляющим собой систему рычагов так, что каждый педальный элемент установлен на коромысле, соединенном через шатун с коленчатым валом, жестко соединенным с ведущей звездочкой цепной передачи.
Недостатком данного привода является сложность вывода рычажных механизмов перемещения педалей из мертвого положения за счет большего холостого хода, чем рабочего хода, что приводит к большим усилиям человека, необходимым при движении транспортного средства.
Технический результат направлен на уменьшение усилия человека и улучшение условий вывода рычажных механизмов с возвратно-поступательным перемещением педалей из мертвого положения.
Технический результат достигается тем, что мускульный привод транспортного средства, содержащий цепные передачи, муфты свободного хода, связанные со звездочками цепных передач, закрепленными на раме, на которой расположены с возможностью возвратно-поступательного перемещения относительно полотна дороги педальных элементов за счет силы тяжести человека, педальные элементы соединены с механическим приводом, представляющим собой систему рычагов так, что каждый педальный элемент установлен на коромысле, подвижно соединенном через шатун с коленчатым валом, жестко соединенным с ведущей звездочкой цепной передачи, при этом педальные элементы выполнены с возможностью вращения относительно коромысла и дополнительно снабжены регулируемыми упорами для вывода рычажных систем из мертвого положения в своем верхнем положении, которые могут быть выполнены в виде передачи «винт-гайка» и контактируют либо с шатунами, либо с коленчатым валом.
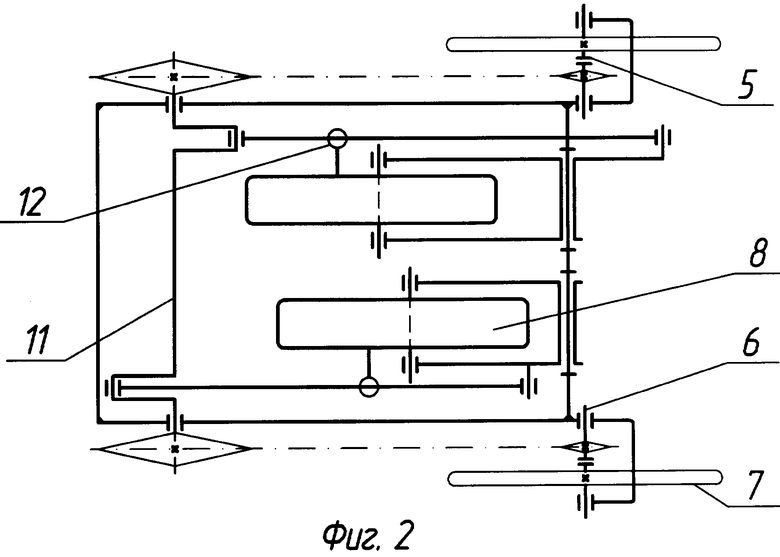
На фиг.1 приведена кинематическая схема мускульного привода транспортного средства в рабочем положении, на фиг.2 - вид сверху.
Мускульный привод транспортного средства, смонтированный на раме 1, содержит замкнутые цепные передачи 2, ведущие звездочки 3 и ведомые звездочки 4, закрепленные на раме 1, муфты свободного хода 5, связанные с ведомыми звездочками 4 и валами 6, на которых жестко закреплены колеса 7, педальные элементы 8, выполненные в виде платформ, обеспечивающих полное прилегание стоп ног человека и установленных подвижно на осях, жестко закрепленных на коромыслах 9, и системы рычажных механизмов, содержащих два коромысла 9, коленчатый вал 11, два шатуна 10. При этом каждый педальный элемент 8 установлен на коромысле 9 рычажного механизма, которое подвижно соединено с коленчатым валом 11 через шатун 10. Причем коленчатый вал 11 жестко соединен с ведущими звездочками 3 цепных передач. На вращающихся педальных элементах 8 установлены регулируемые упоры 12, выполненные, например, в виде передачи «винт-гайка», и контактируют либо с шатунами, либо с коленчатым валом.
Мускульный привод транспортного средства работает следующим образом.
В исходном положении один из педальных элементов 8 находится в нижнем положении. Человек за счет своей силы тяжести приводит в движение второй педальный элемент, который находится в верхнем положении, в результате чего приходит в движение коромысло 9, которое в свою очередь через шатун 10 приводит во вращение коленчатый вал 11 совместно с ведущими звездочками 3.
При этом с целью уменьшения усилия человека и надежности вывода механизма из мертвого положения с верхним положением педального элемента производится давление стопой человека на педальный элемент 8 и одновременно его вращение по часовой стрелке, который через регулируемый упор 12 приводит во вращение шатун 10 и коленчатый вал 11. Зазор между упором 12 и шатуном 10 регулируется таким образом, чтобы обеспечивались оптимальные условия работы стопы человека в течение полного цикла движения педального элемента 8.
Ведущие звездочки 3 через цепные передачи 2 приводят во вращение ведомые звездочки 4 совместно с валами 6 и колесами 7. После того, как второй педальный элемент 8 переместится вниз, а первый педальный элемент вверх, человек переносит силу тяжести на другую ногу, которая в это время находится на первом педальном элементе 8, в результате чего он из крайнего верхнего положения пойдет вниз, а второй педальный элемент 8 из крайнего нижнего положения - вверх. Далее действия человека повторяются.
В случае, когда человек не приводит в движение педальные элементы 8, то ведущая звездочка 3 становится неподвижной. Неподвижная ведущая звездочка 3 в свою очередь через цепную передачу 2 тормозит ведомую звездочку 4. Однако валы 6 с колесами 7 продолжают вращаться за счет работы муфт свободного хода 5. Наличие двух цепных передач 2 и обгонных муфт 5 позволяет создать независимые скорости вращения колес 7 при повороте транспортного средства. Применение предлагаемого мускульного привода транспортного средства позволяет:
- уменьшить усилие человека за счет использования его силы тяжести и увеличить рабочий ход коленчатого вала по сравнению с холостым ходом при выводе из мертвого положения посредством регулируемых упоров;
- объединить функции мускульного тренажера и транспортного средства;
- улучшить обзор и соответственно увеличить безопасность движения;
- уменьшить габаритные размеры транспортного средства;
- получить профилактический эффект за счет вертикального положения тела человека при езде на веломобиле в отличие от сидячего положения, так как требует не только попеременного напряжения мышц конечностей, но и перемещения центра тяжести тела с ноги на ногу в каждом цикле движения, что меняет давление на межпозвоночные диски и способствует профилактике остеохондроза поясничного отдела позвоночника.
| название | год | авторы | номер документа |
|---|---|---|---|
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА И/ИЛИ МУСКУЛЬНОГО ТРЕНАЖЕРА (ВАРИАНТЫ) | 2012 |
|
RU2533870C2 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2521469C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2392166C1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2100240C1 |
| Велосипед | 1990 |
|
SU1703542A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРИВОДИМОЕ В ДЕЙСТВИЕ МУСКУЛЬНОЙ СИЛОЙ ВОДИТЕЛЯ | 1992 |
|
RU2106278C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРИВОДИМОЕ В ДЕЙСТВИЕ МУСКУЛЬНОЙ СИЛОЙ ЧЕЛОВЕКА | 1995 |
|
RU2086453C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРИВОДИМОЕ В ДЕЙСТВИЕ МУСКУЛЬНОЙ СИЛОЙ ЧЕЛОВЕКА | 1995 |
|
RU2086452C1 |
| ПОЛНОПРИВОДНЫЙ ВЕЛОСИПЕД | 2008 |
|
RU2379211C1 |
| Транспортное средство, приводимое в действие мускульной силой человека, преимущественно велосипед | 2017 |
|
RU2651477C1 |
Изобретение относится к приводам с вертикальным возвратно-поступательным перемещением ножных рычагов за счет силы тяжести человека при его вертикальном положении и с устройством, способствующим прохождению мертвых положений. Рычажные системы привода содержат коромысла (9), соединенные через шатуны (10) с коленчатым валом, соединенным с ведущими звездочками (3). На коромыслах (9) с возможностью вращения расположены педальные элементы, которые снабжены регулируемыми упорами (12) для вывода шатунов (10) или коленчатого вала рычажных систем из мертвого положения в верхнем положении педальных элементов. Решение направлено на улучшение условий вывода рычажных систем с вертикальным перемещением педалей из мертвого положения. 3 з.п. ф-лы, 2 ил.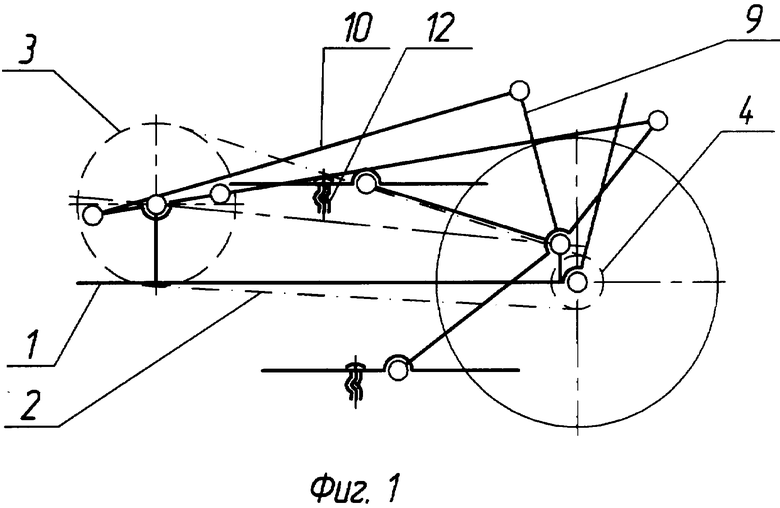
1. Мускульный привод транспортного средства, содержащий цепные передачи, муфты свободного хода, связанные со звездочками цепных передач, закрепленными на раме, рычажные системы, на коромыслах которых расположены педальные элементы с возможностью вертикального возвратно-поступательного перемещения относительно дорожного полотна за счет силы тяжести человека при его вертикальном положении, при этом коромысла подвижно соединены через шатуны с коленчатым валом, жестко соединенным с ведущими звездочками цепных передач, отличающийся тем, что педальные элементы выполнены с возможностью вращения относительно коромысел, при этом педальные элементы дополнительно снабжены регулируемыми упорами для вывода рычажных систем из мертвого положения в своем верхнем положении.
2. Мускульный привод транспортного средства по п.1, отличающийся тем, что регулируемые упоры могут быть выполнены в виде передачи «винт-гайка».
3. Мускульный привод транспортного средства по п.1, отличающийся тем, что регулируемые упоры контактируют с шатунами.
4. Мускульный привод транспортного средства по п.1, отличающийся тем, что регулируемые упоры контактируют с коленчатым валом.
| Устройство для привода створки | 1976 |
|
SU589353A1 |
| СТОЙКИЙ МАГНЕЗИАЛЬНЫЙ ОКСИХЛОРИДНЫЙ ЦЕМЕНТ И СПОСОБ ЕГО ПОЛУЧЕНИЯ | 2009 |
|
RU2506241C2 |
| ГРУЗОВОЙ ВЕЛОСИПЕД ПОВЫШЕННОЙ ГРУЗОПОДЪЕМНОСТИ | 1999 |
|
RU2158212C1 |
| Наглядное пособие для указания времени в различных частях земного шара | 1941 |
|
SU69827A1 |
| DE 10139925 A1, 11.07.2002 | |||
| WO 2006119601 A1, 16.11.2006. | |||

