Настоящее изобретение относится к области техники электрических устройств, и, более конкретно, оно относится к блокировочному устройству, как определено в ограничительной части первого пункта формулы изобретения.
В области техники электрических устройств является известным применение блокировочных устройств, которые могут быть связаны с автоматическими выключателями электрической цепи, например для предотвращения нежелательного одновременного соединения потребителя электроэнергии с двумя энергосистемами, предназначенными работать взаимоисключающим образом (аналогично, например, основной электросети и резервной электросети).
Являются известными блокировочные устройства, содержащие пару препятствующих рычагов, подходящих для жесткого соединения с соответствующими передними подвижными рычагами автоматических выключателей электрической цепи, подлежащих блокировке. Каждый из таких препятствующих рычагов является независимо перемещаемым между первым и вторым рабочим положением и является подходящим для альтернативной и выборочной фиксации, посредством фиксирующего элемента, который может скользить между первым и вторым положением фиксации, в одном из таких рабочих положений. Таким образом, подвижный рычаг автоматического выключателя, который соединен с зафиксированным препятствующим рычагом, в свою очередь, фиксируется в требуемом рабочем положении подвижного рычага. Следовательно, один из автоматических выключателей, связанных с блокировочным устройством, может поддерживаться, например, в разомкнутом состоянии, тогда как другой автоматический выключатель может свободно переходить между соответствующими разомкнутым и замкнутым состояниями. Блокировочное устройство вышеупомянутого типа описано, например, в документе EP1916682.
Основная цель настоящего изобретения заключается в обеспечении альтернативного решения блокировочного устройства относительно решений предшествующего уровня техники, описанного выше.
Эта и другие цели достигаются с помощью блокировочного устройства, как определено в п.1 прилагаемой формулы изобретения в основном варианте осуществления и в зависимых пунктах формулы изобретения в некоторых конкретных вариантах осуществления.
Группа элементов, как определено в п.12, также образует объект настоящего изобретения.
Дополнительные признаки и преимущества изобретения станут более очевидными из нижеследующего подробного описания, данного исключительно в качестве примера, а не для целей ограничения, со ссылкой на сопровождающие чертежи, на которых:
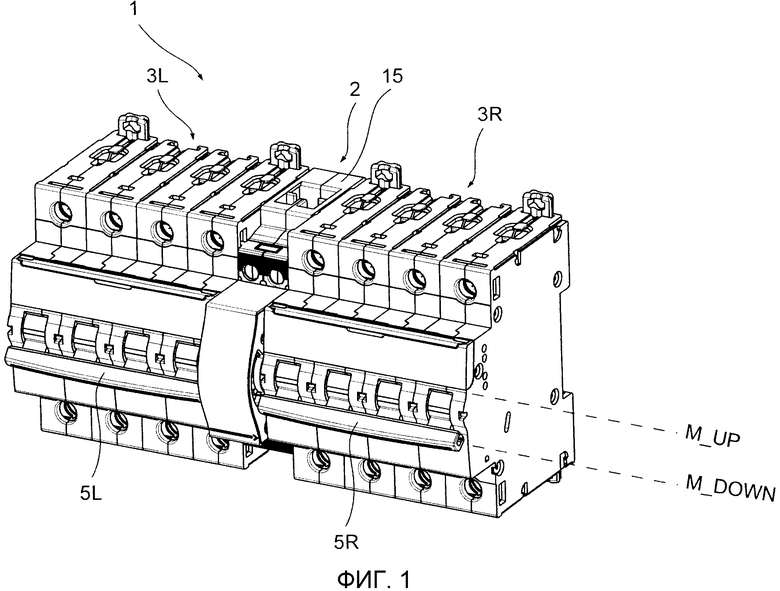
- фиг.1 представляет собой аксонометрическое изображение, на котором видна передняя сторона группы элементов, включая первый и второй автоматический выключатель электрической цепи, между которыми размещено блокировочное устройство в соответствии с предпочтительным в настоящее время вариантом осуществления, при этом группа элементов представлена в первой рабочей конфигурации;
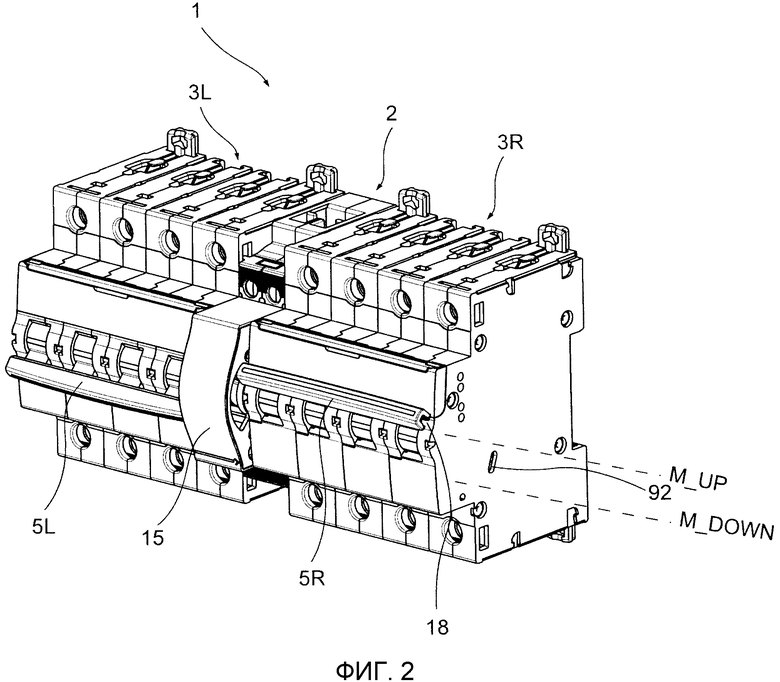
- фиг.2 представляет собой перспективный вид группы элементов фиг.1, представленной во второй рабочей конфигурации;
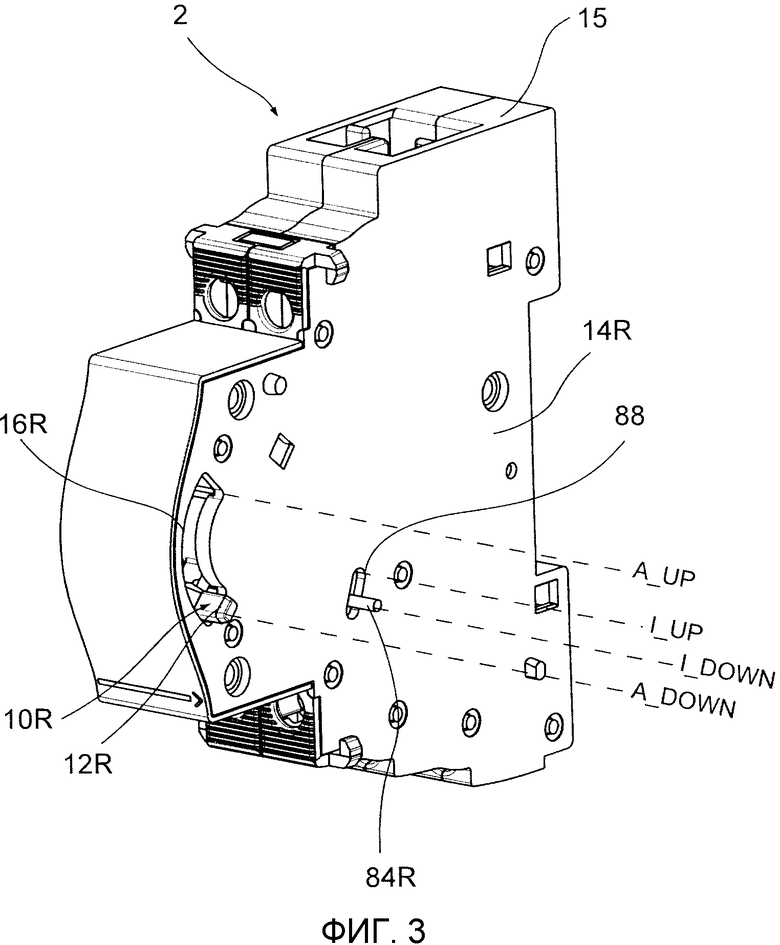
- фиг.3 представляет собой аксонометрическое изображение блокировочного устройства, представленного в первой рабочей конфигурации;
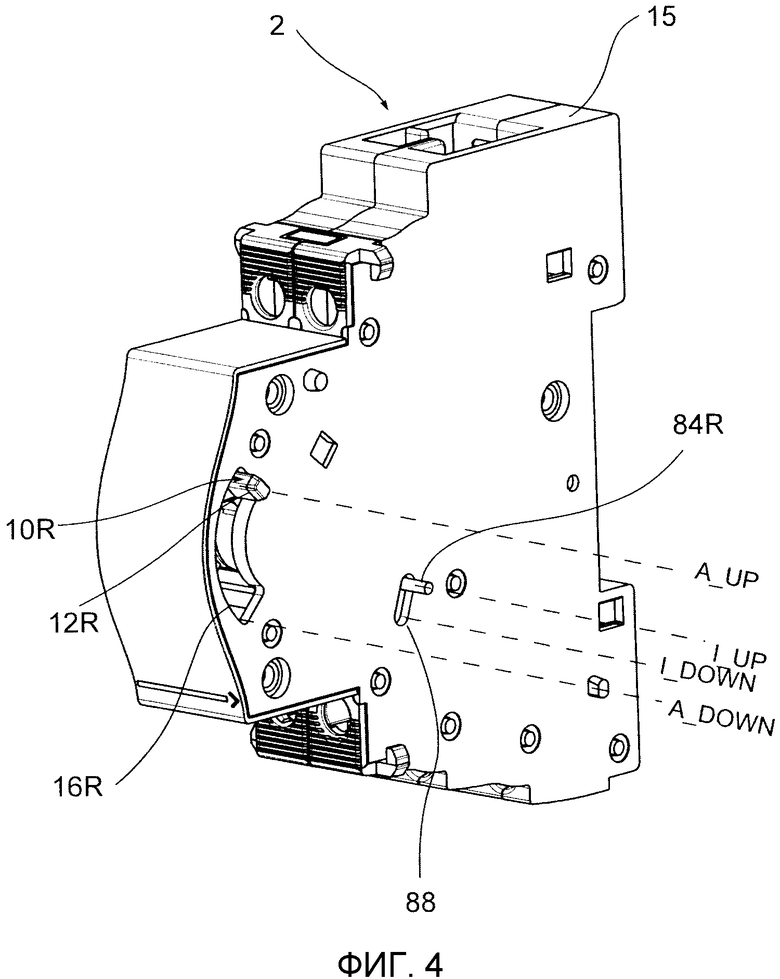
- фиг.4 представляет собой аксонометрическое изображение блокировочного устройства, представленного во второй рабочей конфигурации;
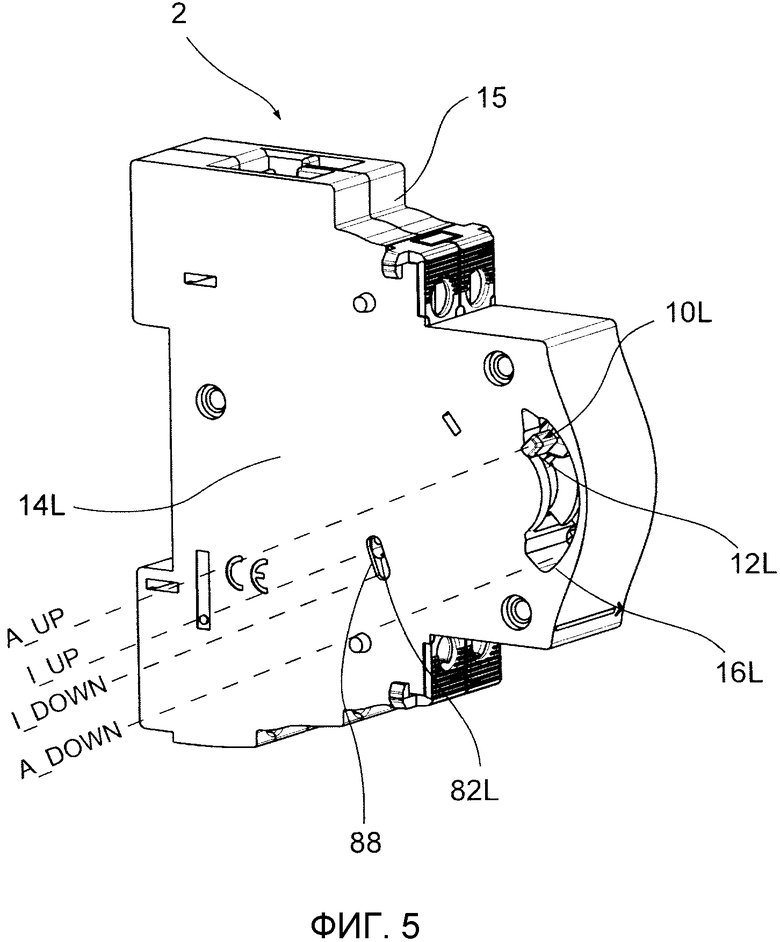
- фиг.5 представляет собой аксонометрическое изображение блокировочного устройства, на котором такое устройство рассматривается со стороны, по существу, противоположной относительно сторон на фиг.3 и 4;
- фиг.6 представляет собой аксонометрическое изображение некоторых составных частей блокировочного устройства;
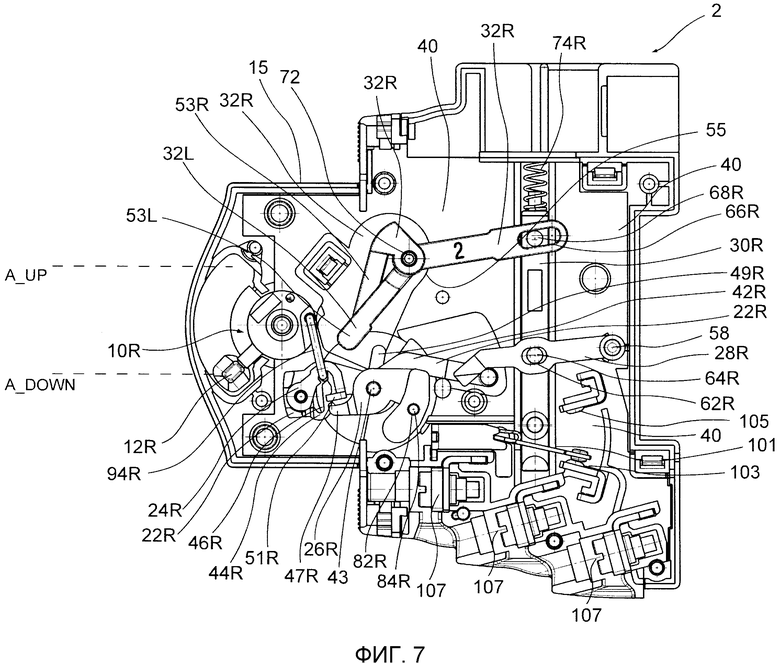
- фиг.7 представляет собой вид в плане с верхней стороны блокировочного устройства, на котором боковая стенка такого устройства, которая, в частности, показана на фиг.3, была удалена с тем, чтобы сделать первый кинематический механизм блокировочного устройства, представленного в первой рабочей конфигурации, более видимым;
- фиг.8 представляет собой вид в плане с верхней стороны блокировочного устройства, на котором первый кинематический механизм представлен во второй рабочей конфигурации;
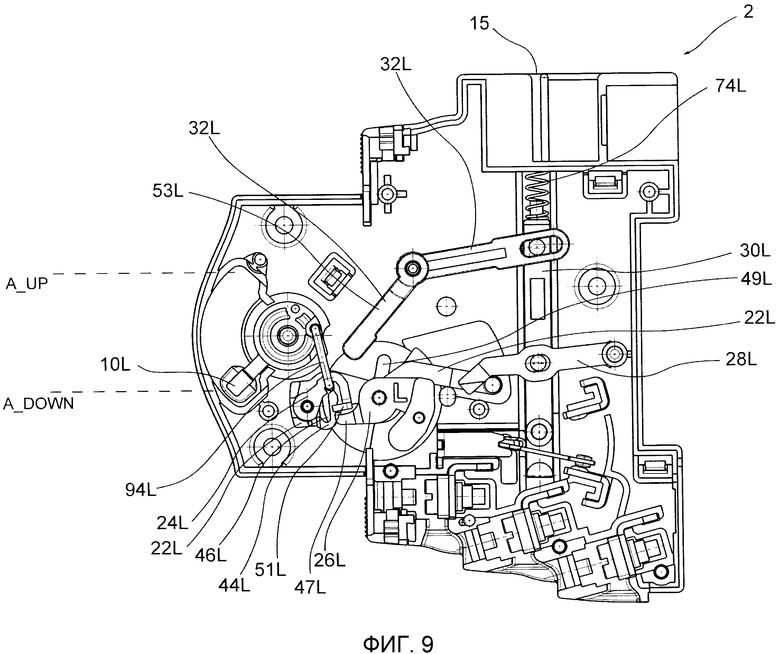
- фиг.9 представляет собой вид в плане с верхней стороны блокировочного устройства, аналогичный виду фиг.7, на котором также были удалены первый кинематический механизм и опорный элемент, представленные, например, на фиг.6, для того, чтобы показать второй кинематический механизм блокировочного устройства, представленного в первой рабочей конфигурации;
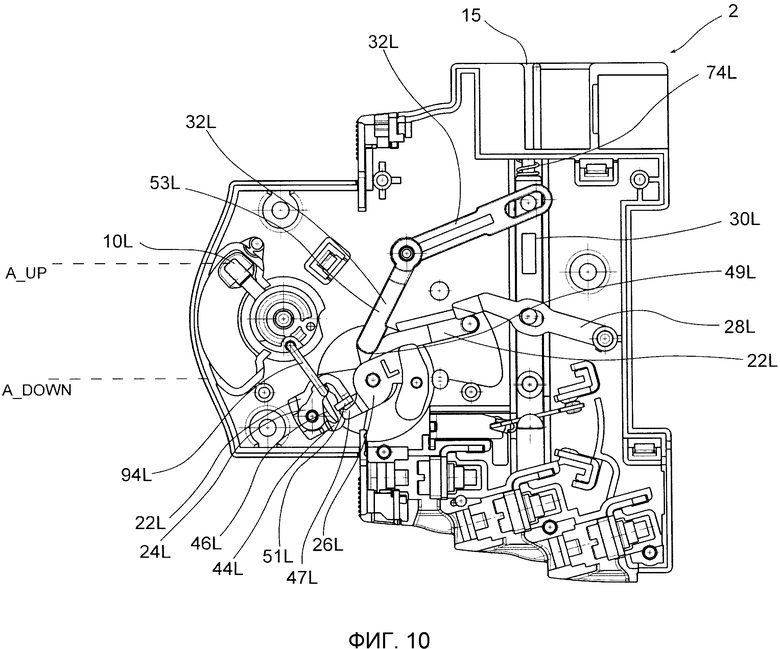
- фиг.10 представляет собой вид в плане с верхней стороны, на котором второй кинематический механизм представлен во второй рабочей конфигурации;
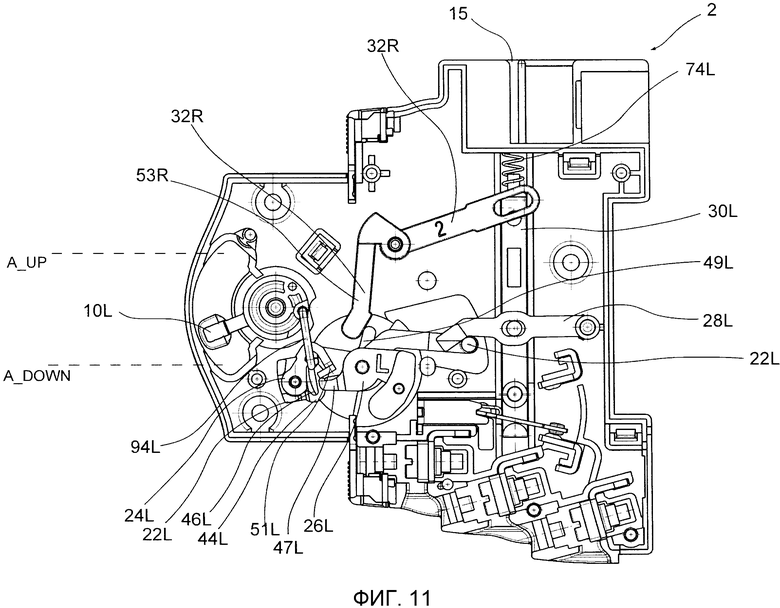
- фиг.11 представляет собой вид в плане с верхней стороны, на котором второй кинематический механизм представлен в третьей конфигурации, и на котором был удален элемент второго кинематического механизма и представлен элемент первого кинематического механизма;
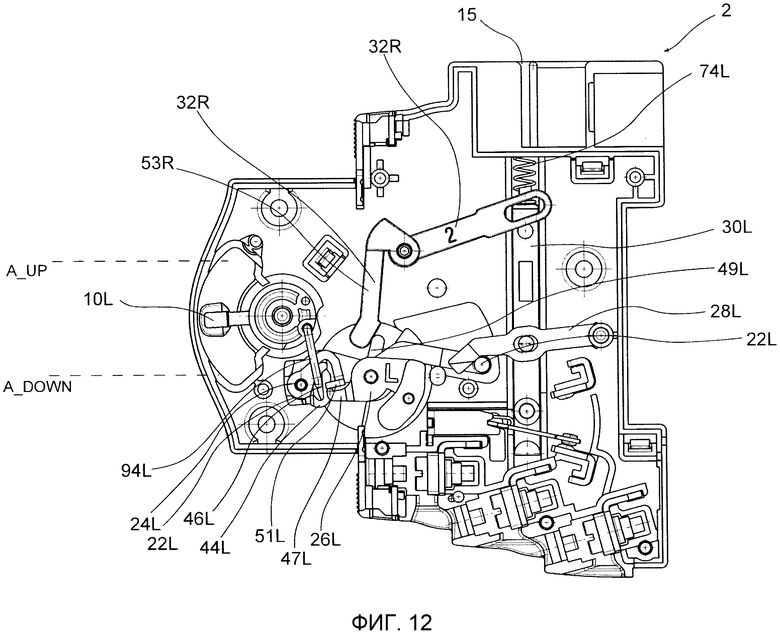
- фиг.12 представляет собой вид в плане с верхней стороны, на котором второй кинематический механизм представлен в четвертой конфигурации, и на котором был удален элемент второго кинематического механизма и представлен элемент первого кинематического механизма;
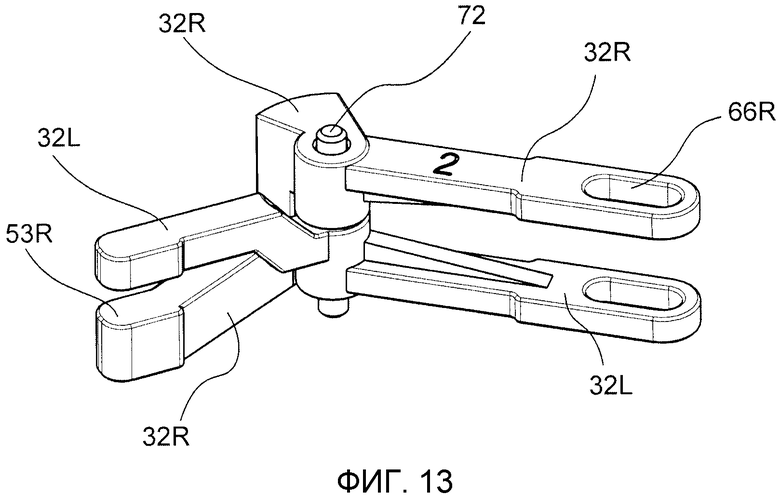
- фиг.13 представляет собой аксонометрическое изображение, на котором можно увидеть два элемента блокировочного устройства;
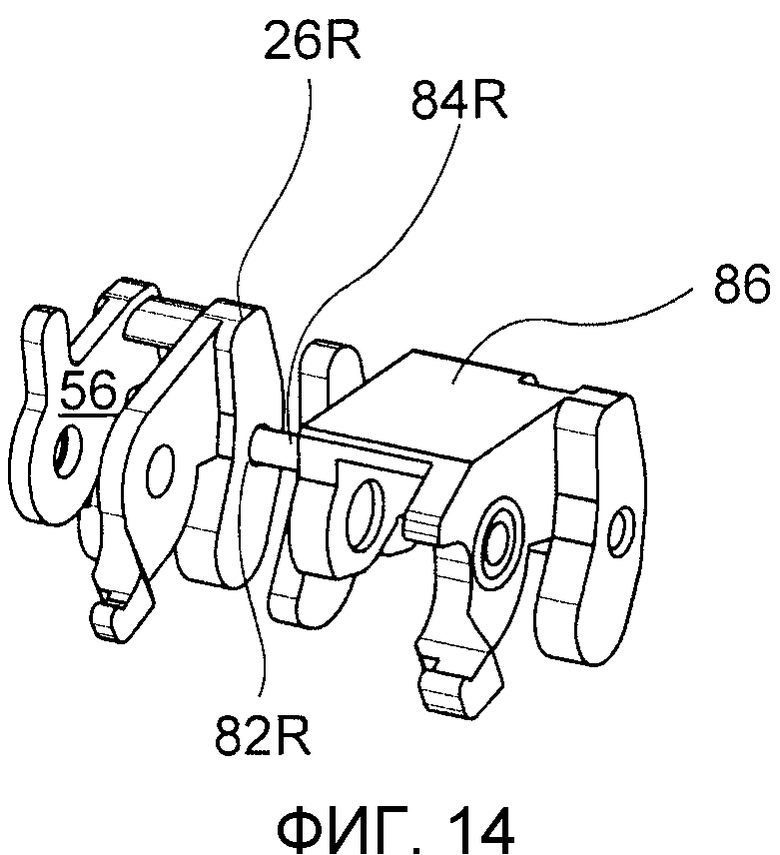
- фиг.14 представляет собой аксонометрическое изображение элемента блокировочного устройства, видимого на фиг.6, который представлен соединенным с элементом одного из автоматических выключателей электрической цепи на фиг.1; и
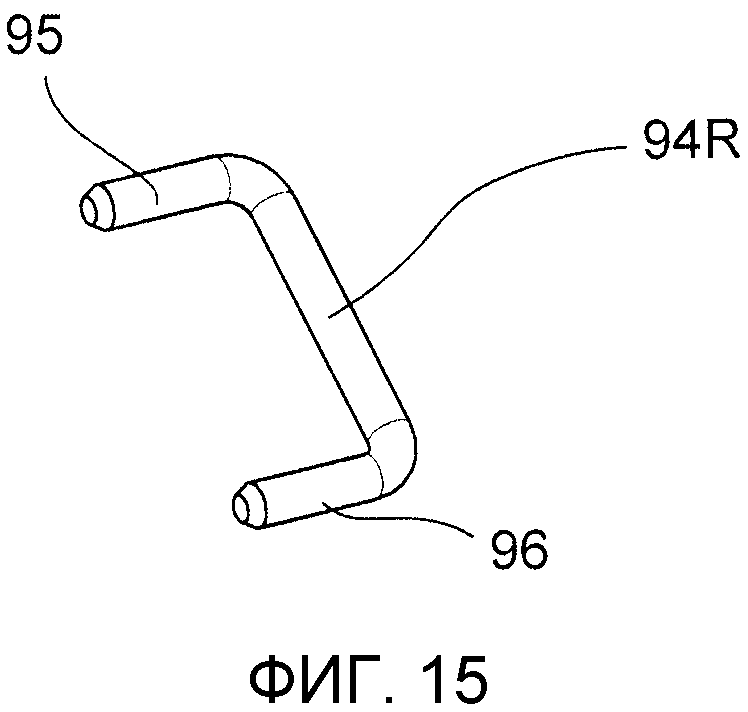
- фиг.15 представляет собой аксонометрическое изображение дополнительного элемента блокировочного устройства.
В настоящем описании и на прилагаемых фигурах, термины "правый", "левый", "нижний" и "верхний" будут использоваться с единственной целью, заключающейся в том, чтобы сделать описание более понятным. Следовательно, такие слова не следует принимать в качестве ограничения изобретения каким-либо образом.
Фиг.1 представляет собой группу элементов, в целом обозначенных с помощью ссылочной позиции 1. Группа 1 содержит блокировочное устройство 2 в соответствии с предпочтительным в настоящее время вариантом осуществления. Такое устройство функционально размещено между первым автоматическим выключателем электрической цепи или правым автоматическим выключателем 3R и вторым автоматическим выключателем электрической цепи или левым автоматическим выключателем 3L для блокировки таких автоматических выключателей. Автоматические выключатели 3R, 3L, соответственно, содержат первый подвижный рычаг или правый подвижный рычаг 5R и второй подвижный рычаг или левый подвижный рычаг 5L. Каждый из таких рычагов является независимо перемещаемым между первым рабочим положением подвижного рычага или нижним положением M_DOWN перемещения и вторым рабочим положением подвижного рычага или верхним положением M_UP перемещения. Нижнее и верхнее положения перемещения надлежащим образом соответствуют разомкнутому состоянию и замкнутому состоянию соответствующего автоматического выключателя. В примере на фиг.1, автоматические выключатели 3R, 3L представляют собой два идентичных модульных автоматических выключателя электрической цепи, каждый из которых, в частности, составлен из четырех однополюсных автоматических выключателей, постоянно соединенных друг с другом.
Следует обратить внимание, что для целей настоящего описания под выражением блокировочное устройство подразумевается, в общем смысле, устройство, которое является подходящим для предотвращения одновременного нахождения, по меньшей мере, первого и второго автоматического выключателя электрической цепи, между которыми функционально размещено такое устройство, в замкнутом состоянии. Типичный пример применения устройств этого типа представляет собой устройство, использующееся во время установки защитных устройств электропроводящих групп. В этих применениях, блокировочное устройство используется для предотвращения одновременного соединения потребителя электроэнергии с двумя электросетями.
Более конкретно, следует подчеркнуть, что для целей настоящего описания под блокировочным устройством мы подразумеваем устройство, в котором функция блокировки необязательно должна быть получена посредством механической фиксации подвижных рычагов автоматических выключателей, подлежащих блокировке.
В примере на фиг.1, блокировочное устройство 2 также является модульным устройством.
Со ссылкой на фиг.3-5, можно заметить, что блокировочное устройство 2 содержит первый приводной рычаг или правый приводной рычаг 10R и второй приводной рычаг или левый приводной рычаг 10L.
Каждый из таких рычагов 10R, 10L является независимо перемещаемым между первым рабочим положением приводного рычага или нижним положением A_DOWN приведения в действие и вторым рабочим положением приводного рычага или верхним положением A_UP приведения в действие. На фиг.3 и 4, правый приводной рычаг 10R представлен в нижнем положении A_DOWN приведения в действие и в верхнем положении A_UP приведения в действие, соответственно. На фиг.5, где блокировочное устройство рассматривается со стороны, которая, по существу, является противоположной относительно видимой на фиг.3 и 4, левый приводной рычаг 10L представлен в верхнем положении A_UP приведения в действие.
Правый и левый приводные рычаги 10R, 10L могут быть функционально соединены с правым автоматическим выключателем 3R и с левым автоматическим выключателем 3L, соответственно.
С такой целью, можно увидеть, что приводные рычаги 10R, 10L предпочтительно содержат соответствующие взаимосвязывающие части 12R, 12L, которые в примере соответствующим образом частично выступают от двух противоположных боковых стенок 14R, 14L корпуса 15 блокировочного устройства. Части 12R, 12L являются перемещаемыми в соответствующих отверстиях 16R, 16L для перемещения, в примере имеющих форму, аналогичную секторам круглой короны, предусмотренных в боковых стенках 14R, 14L.
Части 12R, 12L являются подходящими для вставки в соответствующие взаимосвязывающие отверстия 18 (фиг.2), которые предусмотрены сбоку, по меньшей мере, на одной стороне правого и левого подвижных рычагов 5R, 5L для жесткого соединения каждого приводного рычага 10R, 10L с соответствующим подвижным рычагом 5R, 5L. Так как такие рычаги соединены таким образом, чтобы жестко прикрепляться друг к другу, когда подвижный рычаг одного из автоматических выключателей 3R, 3L, соответственно, принимает нижнее M_DOWN или верхнее M_UP положение перемещения, приводной рычаг, соединенный с таким подвижным рычагом, принимает нижнее A_DOWN или верхнее A_UP положение приведения в действие, соответственно.
В примере на фиг.2, можно увидеть только одно из отверстий 18, предусмотренное на стороне правого подвижного рычага. Однако, аналогичное отверстие также предусмотрено на противоположной стороне такого подвижного рычага для размещения взаимосвязывающей части 12R.
Со ссылкой на фиг.7 и 9, можно увидеть, что блокировочное устройство содержит первый кинематический механизм или правый кинематический механизм 22R, 24R, 26R, 28R, 30R, 32R (фиг.7) и второй кинематический механизм или левый кинематический механизм 22L, 24L, 26L, 28L, 30L, 32L (фиг.9). Правый кинематический механизм и левый кинематический механизм являются независимо приводимыми в движение посредством правого приводного рычага 10R и левого приводного рычага 10L, соответственно. В частности, каждый из таких кинематических механизмов является подходящим для принятия первой рабочей конфигурации и второй рабочей конфигурации. В случае правого кинематического механизма, первая (фиг.7) и вторая (фиг.8) рабочая конфигурация могут быть соответствующим образом связаны с разомкнутым состоянием и с замкнутым состоянием правого автоматического выключателя 3R. Аналогично, в случае левого кинематического механизма, первая (фиг.9) и вторая (фиг.10) рабочая конфигурация могут быть соответствующим образом связаны с разомкнутым состоянием и с замкнутым состоянием левого автоматического выключателя 3L.
Следует обратить внимание, что каждый приводной рычаг 10R, 10L является подходящим для принятия первого рабочего состояния или состояния приведения в действие и второго рабочего состояния или холостого состояния. Более конкретно, как будет пояснено в остальной части описания, в состоянии приведения в действие, каждый приводной рычаг обеспечивает возможность приведения в действие соответствующего кинематического механизма таким образом, что, когда такой рычаг соответственно принимает нижнее положение A_DOWN приведения в действие или верхнее положение A_UP приведения в действие, такой кинематический механизм соответственно принимает первую или вторую рабочую конфигурацию. В холостом состоянии, с другой стороны, каждый приводной рычаг представляет собой, по существу, холостой рычаг, перемещаемый между нижним и верхним положениями приведения в действие. Еще более конкретно, следует обратить внимание, что каждый приводной рычаг 10R, 10L является подходящим для принятия холостого состояния, когда другой из таких приводных рычагов одновременно принимает состояние приведения в действие и верхнее положение A_UP приведения в действие.
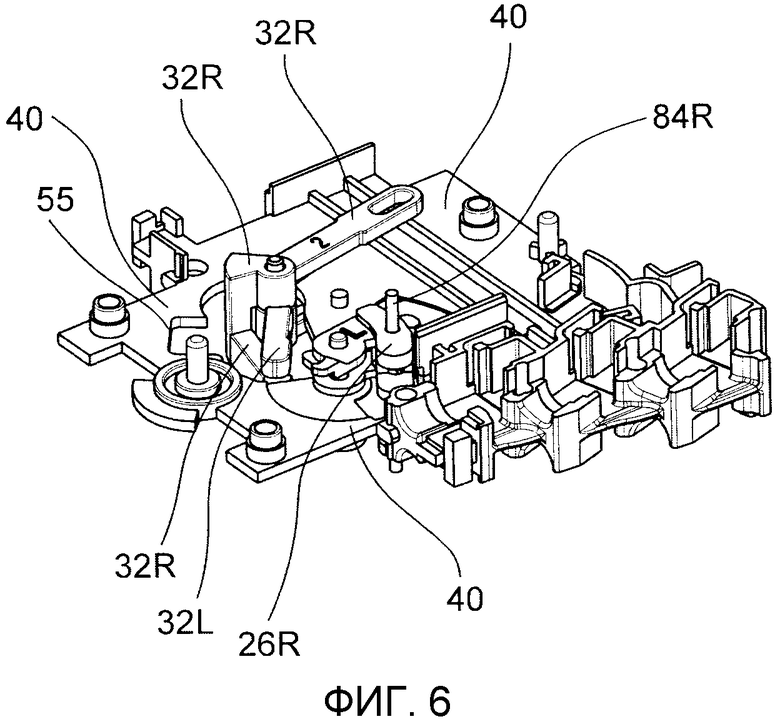
Фиг.7 представляет собой вид в плане, на котором боковая стенка 14R (фиг.3) корпуса 15 устройства была удалена для того, чтобы показать правый кинематический механизм 22R, 24R, 26R, 28R, 30R, 32R. На фиг.9, с другой стороны, вместе со стенкой 14R, также были удалены правый кинематический механизм и опорный элемент 40 для того, чтобы показать левый кинематический механизм 22L, 24L, 26L, 28L, 30L, 32L. Предпочтительно пластинчатый опорный элемент 40 размещен между правым кинематическим механизмом и левым кинематическим механизмом, и он предусмотрен для поддерживания, по меньшей мере, одного из таких кинематических механизмов. В примере, опорный элемент или опорная пластина 40, видимая более подробно на фиг.6, является подходящей для поддерживания правого кинематического механизма.
Следует обратить внимание, что левый кинематический механизм имеет, по существу, идентичное функционирование, что и правый кинематический механизм. В примере, левый кинематический механизм также является конструктивно, по существу, таким же или, во всяком случае, конструктивно очень похожим на правый кинематический механизм. Другими словами, в примере, форма одного или более элементов левого кинематического механизма также может отличаться до определенной степени от формы соответствующих элементов правого кинематического механизма (например, можно рассмотреть элементы 32R и 32L, представленные на фиг.13). В таком случае, функционирование таких элементов левого кинематического механизма остается, в любом случае, по существу, идентичным функционированию соответствующих элементов правого кинематического механизма справа. Еще другими словами, если не указано особо, что будет описываться в дальнейшем относительно правого кинематического механизма также относится, с необходимыми поправками, к левому кинематическому механизму. Поэтому, в настоящем описании, подробное описание левого кинематического механизма было опущено.
Еще со ссылкой на фиг.7, в соответствии с предпочтительным в настоящее время вариантом осуществления, правый кинематический механизм содержит первый перемещающий рычаг или правый перемещающий рычаг 22R, первый разъединяющий элемент или правый разъединяющий рычаг 24R, первый передаточный элемент или правый передаточный рычаг 26R, первый соединительный рычаг или правый соединительный рычаг 28R, первый ползун или правый ползун 30R и первый переключающий элемент или правый переключающий рычаг 32R.
Со ссылкой на фиг.9, в соответствии с таким вариантом осуществления, левый кинематический механизм (фиг.9) соответствующим образом содержит второй перемещающий рычаг или левый перемещающий рычаг 22L, второй разъединяющий элемент или левый разъединяющий рычаг 24L, второй передаточный элемент или левый передаточный рычаг 26L, второй соединительный рычаг или левый соединительный рычаг 28L, второй ползун или левый ползун 30L и второй переключающий элемент или левый переключающий рычаг 32L.
Возвращаясь к фиг.7, можно заметить, что правый перемещающий рычаг 22R шарнирно соединен с соответствующим средним участком перемещающего рычага 42R таким образом, чтобы поворачиваться вокруг первого стержня 43 устройства, жестко прикрепленного к корпусу 15 устройства.
Перемещающий рычаг 22R содержит первый конец перемещающего рычага, с которым правый разъединяющий рычаг 24R предпочтительно шарнирно соединен таким образом, чтобы поворачиваться вокруг оси, параллельной первому стержню 43 устройства. Как будет прояснено в остальной части описания, такой разъединяющий рычаг, в частности, является приводимым в движение с тем, чтобы заставить соответствующий приводной рычаг, т.е. правый приводной рычаг 10R, принять вышеупомянутое холостое состояние. Правый перемещающий рычаг 22R также содержит второй конец перемещающего рычага, подходящий для соединения, предпочтительно опирающимся образом, с правым соединительным рычагом 28R. Как можно заметить на фиг.7, первый конец перемещающего рычага содержит участок 44R сцепления, предпочтительно крюкообразный. В частности, правый разъединяющий рычаг 24R соединен с пружиной разъединяющего рычага, которая не представлена на фигурах, которая является подходящей для приведения в движение правого разъединяющего рычага по направлению к участку 44R сцепления правого перемещающего рычага 22R. Предпочтительно, разъединяющий рычаг 24R и перемещающий рычаг 22R являются подходящими для задания пространства для перемещения или щели 46R для перемещения между ними.
Правый передаточный рычаг 26R шарнирно соединен с корпусом 15 устройства предпочтительно таким образом, чтобы быть способным поворачиваться, независимо от перемещения правого рычага 22R, вокруг первого стержня 43 устройства. Следует обратить внимание, что правый передаточный рычаг является подходящим для сцепления с левым переключающим рычагом 32L. Более конкретно, передаточный рычаг 26R содержит разъединяющий участок или разъединяющий зубец 47R и участок механического взаимодействия или взаимодействующий выступ 49R. Разъединяющий зубец 47R является подходящим для сцепления с толкающим участком 51R, предпочтительно плоским, правого разъединяющего рычага 24R. Взаимодействующий выступ 49R, с другой стороны, является подходящим для сцепления с препятствующим участком 53L, в примере, свободным концом, левого переключающего рычага 32L. Со ссылкой на фиг.9, можно увидеть, что левый передаточный рычаг 26L аналогично содержит разъединяющий участок или разъединяющий зубец 47L и участок механического взаимодействия или взаимодействующий выступ 49L, которые являются подходящими, соответственно, для сцепления с толкающим участком 51L левого разъединяющего рычага 24L и препятствующим участком 53R правого переключающего рычага 32R (такой рычаг не показан на фиг.9).
Касательно этого, следует обратить внимание, что опорная пластина 40 содержит, по меньшей мере, сквозное отверстие 55 опорного элемента (фиг.7), которое является подходящим для функционального одновременного прохождения левого переключающего рычага 32L и правого переключающего рычага 32R.
На фиг.14, на которой правый передаточный рычаг 26R представлен более подробно, можно заметить, что такой рычаг предпочтительно содержит посадочное место 56, например образованное между парой стенок такого передаточного рычага, которое является подходящим для размещения среднего участка перемещающего рычага 42R (фиг.7).
Соединительный рычаг 28R содержит первый конец соединительного рычага, подходящий, в примере, для опирания на второй конец перемещающего рычага, и второй конец соединительного рычага, шарнирно соединенный со вторым стержнем 58 устройства, жестко прикрепленным к корпусу 15 устройства. Кроме того, правый соединительный рычаг 28R содержит средний участок соединительного рычага, закрепленный шарнирным образом относительно правого ползуна 30R. Предпочтительно, средний участок соединительного рычага предусмотрен с удлиненной щелью 62R соединительного рычага, которая является подходящей для размещения первого стержня 64R ползуна, который жестко прикреплен к правому ползуну 30R.
Правый переключающий рычаг 32R также закреплен шарнирным образом относительно ползуна 30R. Предпочтительно, правый переключающий рычаг содержит первый конец переключающего рычага, который оснащен удлиненной щелью 66R переключающего рычага. Такая щель, в частности, является подходящей для размещения второго стержня 68R ползуна, жестко прикрепленного к правому ползуну 30R. В примере, правый переключающий рычаг 32R содержит, кроме препятствующего участка 53R, соответствующий средний участок переключающего рычага, шарнирно соединенный таким образом, чтобы поворачиваться вокруг третьего стержня 72 устройства, жестко прикрепленного к корпусу 15 устройства.
Предусмотрена противодействующая пружина 74R или эквивалентный упругий элемент, предпочтительно посаженный на конец ползуна 30R таким образом, чтобы противодействовать такому ползуну в направлении скольжения. Предусмотрена аналогичная противодействующая пружина 74L, предпочтительно посаженная на конец ползуна 30L таким образом, чтобы противодействовать такому ползуну в направлении скольжения.
Следует обратить внимание, что первый стержень 43, второй стержень 58, третий стержень 72, первый стержень 64R ползуна и второй стержень 68R ползуна имеют оси стержней, которые являются параллельными друг другу.
Возвращаясь к правому передаточному рычагу 26R, на фиг.14, можно заметить, что такой рычаг содержит, по меньшей мере, первый соединительный элемент или правое соединительное углубление 82R, предпочтительно соединительное отверстие, которое является подходящим для взаимодействия, по меньшей мере, с одним первым взаимосвязывающим элементом или правым взаимосвязывающим стержнем 84R для соединения такого стержня с правым кинематическим механизмом.
По меньшей мере, второй соединительный элемент или левое соединительное углубление 82L (фиг.5) предусмотрено на левом передаточном рычаге 26L. Углубление 82L в примере представляет собой отверстие со шпоночным пазом. Однако, в соответствии с дополнительным вариантом осуществления, такое углубление может представлять собой отверстие, которое является таким же, что и отверстие 82R. Соединительное углубление 82L является подходящим для взаимодействия со вторым взаимосвязывающим элементом или левым взаимосвязывающим стержнем (не представлен на фигурах) для соединения такого стержня с левым кинематическим механизмом.
Правый стержень 84R является подходящим для функционального размещения между правым кинематическим механизмом и механизмом для разъединения или для размыкания правого автоматического выключателя. На фиг.14, стержень 84R, в частности, имеет первый конец, который соединен с правым передаточным рычагом 26R, и второй конец, который соединен с элементом 86 автоматического выключателя, который является частью разъединяющего механизма правого автоматического выключателя. Аналогично, левый стержень является подходящим для функционального размещения между левым кинематическим механизмом и разъединяющим или размыкающим механизмом левого автоматического выключателя. В отношение этого, следует отметить, что для обеспечения соединения блокировочного устройства 2 с правым и левым автоматическими выключателями с помощью правого и левого взаимосвязывающих стержней, обе боковые стенки 14L, 14R корпуса 15 устройства и, по меньшей мере, стенки автоматических выключателей, предназначенные быть функционально обращенными к таким стенкам 14L, 14R, оснащены подходящими взаимосвязывающими сквозными отверстиями или взаимосвязывающими щелями 88, 92 (фиг.2, 3 и 5).
В примере, разъединяющие механизмы (не представлены) правого и левого автоматических выключателей представляют собой механизмы быстрого разъединения. Такие механизмы являются подходящими для вынуждения подвижного рычага соответствующего автоматического выключателя резко переместиться по направлению к нижнему положению M_DOWN перемещения с тем, чтобы получить быстрое размыкание автоматического выключателя. Это происходит, в частности, при прохождении заданного промежуточного положения подвижного рычага, когда такой рычаг приводится в движение, например вручную, из верхнего положения M_UP перемещения по направлению к нижнему положению M_DOWN перемещения. Этот тип механизма быстрого разъединения является широко известным для специалиста в данной области и, поэтому, не будет описываться более подробно.
В соответствии с вариантом осуществления, правый кинематический механизм соединен с приводным рычагом 10R посредством первого соединительного элемента или правой соединительной планки 94R. Такая планка представлена более подробно на фиг.15.
С перекрестной ссылкой на фиг.7 и 15, планка содержит, в частности, первый участок планки или первое плечо 95, которое является подходящим для шарнирного соединения с правым приводным рычагом 10R, и второй участок планки или второе плечо 96, которое является подходящим для функционального размещения между правым разъединяющим рычагом 24R и участком 44R сцепления. Когда правый приводной рычаг принимает состояние приведения в действие, второе плечо 96 планки, в частности, зажимается между правым разъединяющим рычагом и участком 44R сцепления. Выступ разъединяющего рычага 24R, в частности, предотвращает то, что планка 94R сваливается в щель 46R для перемещения, когда правый приводной рычаг принимает состояние приведения в действие.
Второй соединительный элемент или левая соединительная планка 94L, имеющая такое же функционирование и предпочтительно такую же форму, что и правая планка 94R, предусмотрена между левым приводным рычагом 10L и левым разъединяющим рычагом 24L для соединения приводного рычага 10L с левым кинематическим механизмом.
Следует подчеркнуть, что, когда правый кинематический механизм соответственно принимает первую (фиг.7) и вторую (фиг.8) рабочую конфигурацию, правый передаточный рычаг 26R является подходящим, соответствующим образом, для принятия первого (фиг.7) и второго (фиг.8) рабочего положения передаточного элемента, тогда как правый переключающий рычаг является подходящим для принятия, соответствующим образом, рабочего положения состояния готовности (фиг.7) и рабочего положения препятствия (фиг.8, 11, 12). Аналогично, когда левый кинематический механизм соответственно принимает первую и вторую рабочую конфигурацию, левый передаточный рычаг является подходящим для принятия, соответствующим образом, первого (фиг.9) и второго (фиг.10) рабочего положения передаточного элемента, тогда как левый переключающий рычаг является подходящим для принятия, соответствующим образом, рабочего положения состояния готовности (фиг.9) и рабочего положения препятствия (фиг.10).
Следует также обратить внимание, что каждый из правого 84R и левого стержней, при соединении с соответствующим передаточным рычагом 26R, 26L, является подходящим для принятия первого взаимосвязывающего положения или нижнего взаимосвязывающего положения I_DOWN и второго взаимосвязывающего положения или верхнего взаимосвязывающего положения I_UP (фиг.3-5). В частности, каждый взаимосвязывающий стержень является подходящим для принятия, соответствующим образом, нижнего или верхнего взаимосвязывающего положения, когда передаточный рычаг, с которым соединен такой стержень, соответствующим образом, принимает первое рабочее положение передаточного элемента (фиг.7 и 9) или второе рабочее положение передаточного элемента (фиг.8 и 10). Такие нижнее и верхнее взаимосвязывающие положения могут быть функционально связаны, соответствующим образом, с разомкнутым состоянием и с замкнутым состоянием автоматического выключателя 3L, 3R, с которым соединен каждый взаимосвязывающий стержень.
Со ссылкой на фиг.11, можно заметить, что правый переключающий рычаг 32R, когда он принимает положение препятствия, является подходящим для сцепления с левым передаточным рычагом 26L для предотвращения принятия таким передаточным рычагом второго рабочего положения передаточного элемента. Следует обратить внимание, что на фиг.11, хотя показан левый кинематический механизм, с целью представления конструктивного сцепления между правым переключающим рычагом 32R и левым передаточным рычагом 26L, ни левый переключающий рычаг 32L, ни опорная пластина 40 не были представлены. На такой фигуре, с другой стороны, правый переключающий рычаг 32R был представлен в положении препятствия.
Аналогично, левый переключающий рычаг 32L, когда он принимает положение препятствия, является подходящим для сцепления с правым передаточным рычагом 26R для предотвращения принятия таким передаточным рычагом второго рабочего положения передаточного элемента.
Более конкретно, взаимодействующий выступ 49R, 49L каждого из передаточных рычагов 26R, 26L является подходящим для сцепления с переключающим рычагом другого кинематического механизма, когда такой переключающий рычаг принимает положение препятствия. Следует также обратить внимание, что, как будет прояснено из остальной части описания, разъединяющий зубец 47R, 47L каждого из передаточных рычагов 26R, 26L является подходящим для сцепления с разъединяющим рычагом 24R, 24L соответствующего кинематического механизма для приведения в движение такого разъединяющего рычага и вынуждения соответствующего приводного рычага 10R, 10L принять холостое состояние.
Еще более конкретно, вслед за приведением в движение правого приводного рычага 10R из нижнего положения A_DOWN приведения в действие по направлению к верхнему положению A_UP приведения в действие и при этом левый кинематический механизм принимает вторую рабочую конфигурацию, разъединяющий зубец 47R и взаимодействующий выступ 49R являются подходящими для одновременного сцепления, соответственно, с разъединяющим рычагом 24R и левым переключающим рычагом 32L. Аналогично, со ссылкой, например, на фиг.11, вслед за приведением в движение левого приводного рычага 10L из нижнего положения A_DOWN приведения в действие по направлению к верхнему положению A_UP приведения в действие и при этом правый кинематический механизм принимает вторую рабочую конфигурацию, разъединяющий зубец 47L и взаимодействующий выступ 49L левого передаточного рычага 26L являются подходящими для одновременного сцепления, соответственно, с левым разъединяющим рычагом 24L и правым переключающим рычагом 32R.
Следует обратить внимание, что каждый из переключающих рычагов, правого и левого, является разъемно фиксируемым в положении препятствия, когда соответствующий приводной рычаг, т.е. приводной рычаг, связанный с тем же самым кинематическим механизмом переключающего рычага, одновременно принимает верхнее положение A_UP приведения в действие и состояние приведения в действие. Кроме того, следует обратить внимание, что каждый переключающий рычаг может быть разблокирован для переключения из положения препятствия в положение состояния готовности, когда соответствующий приводной рычаг принимает состояние приведения в действие и приводится в движение для переключения из верхнего положения A_UP приведения в действие в нижнее положение A_DOWN приведения в действие.
Следует обратить внимание, что блокировочное устройство 2 может содержать элементы для сообщения/определения электрического состояния группы 1 и, более конкретно, автоматических выключателей 3R, 3L. В примере, такие элементы, для каждого из кинематических механизмов, правого и левого, содержат пластину 101 электрического контакта, которая является перемещаемой между двумя электрическими контактами 103, 105, которые могут быть соответствующим образом связаны с разомкнутым и замкнутым состоянием соответствующего автоматического выключателя 3L, 3R электрической цепи. С такой целью, один или более электрических зажимов 107, в примере, три зажима для каждого кинематического механизма, предусмотрены в блокировочном устройстве. Управление пластинами 101 электрического контакта связано с перемещением ползунов 30R, 30L. Таким образом, электрическое состояние группы 1 может быть определено посредством коммутации пластин между соответствующими парами электрических контактов 103, 105.
Теперь, когда описана конструкция блокировочного устройства 2, сейчас мы будем описывать его функционирование.
Предположим, что группа элементов 1 в начале находится в конфигурации, показанной на фиг.1. На фиг.1 оба подвижных рычага 5L, 5R представлены в нижнем положении M_DOWN перемещения. Следовательно, оба автоматических выключателя 3R, 3L находятся в разомкнутом состоянии. В такой конфигурации, правый и левый приводные рычаги 10R и 10L принимают нижнее положение A_DOWN приведения в действие (фиг.3). Кроме того, в такой конфигурации, оба приводных рычага принимают состояние приведения в действие. Более конкретно, как правый кинематический механизм, так и левый кинематический механизм принимают первую рабочую конфигурацию (фиг.7 и 9).
Из конфигурации фиг.1, предполагая, например, что правый подвижный рычаг 5R приводится в движение из нижнего положения M_DOWN перемещения в верхнее положение M_UP перемещения, правый автоматический выключатель примет замкнутое состояние, тогда как левый автоматический выключатель останется в соответствующем разомкнутом состоянии (фиг.2). Проходя от положения M_DOWN в положение M_UP, правый подвижный рычаг вместе с тем перемещает правый приводной рычаг 10R, жестко соединенный с ним. Следовательно, правый приводной рычаг переключается из положения A_DOWN в положение A_UP (фиг.3 и 4). Так как, во время такого переключения, правый приводной рычаг по-прежнему находится в состоянии приведения в действие, в конфигурации фиг.2, правый кинематический механизм принимает вторую рабочую конфигурацию (фиг.8). Более конкретно, вслед за таким приведением в движение приводного рычага 10R, правый передаточный рычаг 26R переключается из первого положения передаточного элемента (фиг.7) во второе положение передаточного элемента (фиг.8), и правый взаимосвязывающий стержень 84R, следовательно, переключается из нижнего взаимосвязывающего положения I_DOWN (фиг.3) в верхнее взаимосвязывающее положение I_UP (фиг.4).
Другими словами, как только правым приводным рычагом достигнуто положение A_UP, блокировочное устройство 2 принимает, в общем смысле, конфигурацию, показанную на фиг.4. Следует обратить внимание, что, в такой конфигурации, правый приводной рычаг опять принимает состояние приведения в действие.
Левый кинематический механизм, с другой стороны, остается в первой рабочей конфигурации (фиг.9).
Следует обратить внимание, что во время переключения приводного рычага 10R из положения A_DOWN в положение A_UP, при этом такой рычаг принимает состояние приведения в действие, правая планка 94R оказывает толкающее действие на участок 44R сцепления правого перемещающего рычага 22R. Такой перемещающий рычаг, следовательно, взаимодействует с правым соединительным рычагом с тем, чтобы задать скольжение правого ползуна 30R в противодействие пружине 74R для нагружения такой пружины. Такое скольжение ползуна 30R позволяет правому переключающему рычагу принять положение препятствия (фиг.8, 11, 12), как только правый кинематический механизм переместился во вторую рабочую конфигурацию.
Также следует отметить, что, во время переключения правого кинематического механизма из первой во вторую рабочую конфигурацию, переключение правого передаточного рычага из первого (фиг.7) во второе (фиг.8) положение передаточного элемента задается толкающим действием толкающего участка 51R относительно разъединяющего зубца 47R.
Как только принята вторая рабочая конфигурация, правый кинематический механизм разъемно фиксируется в такой конфигурации благодаря действию пружины 74R и правой планки 94R. Из этого состояния, посредством приведения в движение приводного рычага 10R по направлению к нижнему положению приведения в действие, такой приводной рычаг и правый кинематический механизм являются подходящими для резкого перемещения, благодаря действию пружины 74R, соответственно, в нижнее положение A_DOWN приведения в действие и в первую рабочую конфигурацию. Другими словами, как правый приводной рычаг 10R, так и правый кинематический механизм снова принимают конфигурацию, показанную на фиг.7.
Теперь допустим, из первой конфигурации фиг.2, приведение в движение левого подвижного рычага 5L таким образом, чтобы вынудить такой рычаг переключиться из положения M_DOWN в положение M_UP. Это может произойти вследствие непреднамеренного приведения в движение левого подвижного рычага, например ручного приведения в движение или приведения в движение с помощью механизированного устройства, объединяемого с левым автоматическим выключателем.
Переключаясь из нижнего положения перемещения в верхнее положение перемещения, левый подвижный рычаг 5L приводит левый приводной рычаг 10L во вращение. В этом случае, однако, правый переключающий рычаг 32R находится в положении препятствия и, следовательно, предотвращает принятие левым передаточным рычагом 26L второго положения передаточного элемента (фиг.10). Следует обратить внимание, что в конфигурации фиг.2, между переключающим рычагом 32R и взаимодействующим выступом 49L предпочтительно имеется небольшое пространство для компенсации допусков (не представлено). До того как левый передаточный рычаг сможет принять второе положение передаточного элемента, взаимодействующий выступ 49L является подходящим для упора в препятствующий участок 53R правого переключающего рычага 32R (фиг.12) с тем, чтобы заблокировать поворачивание левого передаточного рычага. Как только достигнуто это состояние упора, продолжая приводить в движение левый приводной рычаг по направлению к верхнему положению приведения в действие, разъединяющий зубец 47L, взаимодействующий с толкающим участком 51L, вызывает смещение или направленное назад перемещение разъединяющего рычага 24L против действия вышеупомянутой пружины разъединяющего рычага (не представлена). Это задает сваливание левой планки 94L в щель 46L для перемещения. С этого момента, приводной рычаг 10L принимает холостое состояние. Следует обратить внимание, что на фиг.11 мы попытались показать состояние, которое имеет место непосредственно перед сваливанием планки 94L в щель 46L для перемещения, в частности, подчеркивая смещение разъединяющего рычага 24L благодаря разъединяющему зубцу 47L. На фиг.12, с другой стороны, показано состояние, при котором планка 94L свалилась в щель 46L для перемещения. Другими словами, как только принято такое холостое состояние, левый приводной рычаг является перемещаемым между нижним положением A_DOWN приведения в действие и верхним положением A_UP приведения в действие, по существу, не приводя в движение левый кинематический механизм и, по существу, задавая только одно движение левой планки 94L в щели 46L для перемещения. Еще другими словами, левый приводной рычаг, по существу, отсоединяется или разъединяется левым кинематическим механизмом. В отношение этого, следует подчеркнуть, что в примере, когда левый приводной рычаг принимает холостое состояние, он является подходящим для принятия верхнего положения A_UP приведения в действие и множества промежуточных положений между таким положением приведения в действие и нижним положением A_DOWN приведения в действие. В частности, следует обратить внимание, что, когда левый приводной рычаг 10L принимает верхнее положение приведения в действие в холостом состоянии, левый кинематический механизм не принимает второй рабочей конфигурации. С другой стороны, когда левый приводной рычаг возвращается в первое положение приведения в действие из холостого состояния, левая планка, взаимодействующая с разъединяющим рычагом 24L, автоматически фиксируется между таким разъединяющим рычагом и участком 44L сцепления, таким образом, приводной рычаг 10L снова принимает состояние приведения в действие.
Следует подчеркнуть, что, когда взаимодействующий выступ 49L упирается в препятствующий участок 53R, также левый взаимосвязывающий стержень, следовательно, предохранен от принятия верхнего взаимосвязывающего положения I_UP. Это обеспечивает, что такой стержень механически препятствует разъединяющему механизму левого автоматического выключателя, предотвращая принятие таким автоматическим выключателем замкнутого состояния. Более конкретно, левый взаимосвязывающий стержень, механически препятствующий разъединяющему механизму левого автоматического выключателя, по существу, задает отсоединение левого подвижного рычага 5L посредством разъединяющего механизма левого автоматического выключателя. Другими словами, левый подвижный рычаг способен принимать верхнее положение перемещения, но левый автоматический выключатель не принимает вытекающее замкнутое состояние.
Подводя итог вышесказанному, когда из конфигурации фиг.2 левый подвижный рычаг приводится в движение по направлению к верхнему положению перемещения, левый приводной рычаг принимает состояние приведения в действие до тех пор, пока не имеет место механическое препятствие между левым передаточным рычагом и правым переключающим рычагом. Затем, продолжая приведение в движение левого подвижного рычага по направлению к верхнему положению перемещения, такой подвижный рычаг, по существу, отсоединяется или разъединяется разъединяющим механизмом левого автоматического выключателя, предотвращая принятие последним замкнутого состояния, при этом левый приводной рычаг принимает холостое состояние. Таким образом, блокировочное устройство 2 делает возможным блокировать правый и левый автоматические выключатели.
В частности, следует обратить внимание, что блокировочное устройство 2 делает возможным блокировать автоматические выключатели 3R, 3L без механической фиксации подвижных рычагов 5R, 5L, а посредством достижения определенного кинематического состояния работы самого блокировочного устройства.
Также следует обратить внимание, что, так как приводные рычаги 10R, 10L не испытывают существенной нагрузки, даже когда подвижный рычаг автоматического выключателя, подлежащего блокировке, приводится в движение по направлению к верхнему положению перемещения, такие рычаги предпочтительно могут быть выполнены из материалов, имеющих модуль упругости и/или предел текучести, который ниже относительно модуля упругости и/или предела текучести материалов, из которых обычно выполняются препятствующие рычаги блокировочных устройств по предшествующему уровню техники.
Основываясь на том, что было рассмотрено выше, является очевидным, что, если в начале конфигурация группы элементов 1 была бы обратной относительно конфигурации фиг.2, т.е. если правый и левый подвижные рычаги в начале принимали бы нижнее положение перемещения и верхнее положение перемещения, соответственно, функционирование группы 1 также было бы обратным относительно того, что описано выше. Более конкретно, в таком случае, вслед за приведением в движение правого подвижного рычага из нижнего положения перемещения в верхнее положение перемещения, правый приводной рычаг принял бы холостое состояние, при этом правый подвижный рычаг отсоединился бы от разъединяющего механизма правого автоматического выключателя.
Поскольку рассматриваются элементы для определения/сообщения электрического состояния группы 1, также можно заметить, что, для целей надлежащего функционирования блокировочного устройства, является необходимым, чтобы разъединение правой и левой планок происходило до возможной коммутации соответствующих пластин 101 электрического контакта с тем, чтобы не вызвать изменения электрического состояния на зажимах 107 блокировочного устройства.
Основываясь на том, что было описано выше, таким образом, является возможным понять, как блокировочное устройство в соответствии с настоящим описанием является таким, чтобы быть способным достичь вышеупомянутых целей.
Не нарушая идеи изобретения, варианты осуществления и особенности изготовления могут быть широко изменены относительно того, что было описано и показано исключительно в качестве неограничивающего примера, по этой причине не выходя за пределы объема изобретения, как определено в прилагаемой формуле изобретения.
Изобретение относится к электрическим устройствам. Блокировочное устройство (2) для блокировки, по меньшей мере, первого и второго автоматических выключателей электрической цепи, т.е. для предотвращения одновременного принятия такими автоматическими выключателями замкнутого состояния, содержит два приводных рычага (10R, 10L), независимо перемещаемые между первым и вторым рабочим положением, которые являются функционально соединяемыми, соответственно, с первым и со вторым автоматическим выключателем электрической цепи, устройство содержит также два кинематических механизма, приводимых в движение посредством приводных рычагов (10R, 10L). Техническим результатом является предотвращение одновременного соединения потребителя электроэнергии с двумя энергосистемами. 2 н. и 10 з.п. ф-лы, 15 ил.
1. Блокировочное устройство (2) для блокировки, по меньшей мере, первого и второго автоматического выключателя (3R, 3L) электрической цепи для предотвращения одновременного принятия такими автоматическими выключателями (3R, 3L) замкнутого состояния, содержащее:
первый и второй приводной рычаг (10R, 10L), независимо перемещаемые между первым и вторым рабочим положением (A_DOWN, A_UP) приводного рычага, при этом первый и второй приводной рычаг (10R, 10L) являются соединяемыми соответственно с первым и со вторым автоматическим выключателем (3R, 3L) электрической цепи,
отличающееся тем, что
указанное устройство содержит первый и второй кинематический механизмы (22R, 24R, 26R, 28R, 30R, 32R; 22L, 24L, 26L, 28L, 30L, 32L) соответственно приводимые в движение посредством первого и второго приводного рычага (10R, 10L), каждый из которых выполнен с возможностью принятия первой рабочей конфигурации, в которой соответствующий автоматический выключатель находится в разомкнутом состоянии, и второй рабочей конфигурации, в которой соответствующий автоматический выключатель находится в замкнутом состоянии;
причем каждый приводной рычаг (10R, 10L) выполнен с возможностью принятия:
- первого рабочего состояния, в котором приводной рычаг (10R) обеспечивает возможность приведения в действие соответствующего кинематического механизма (22R, 24R, 26R, 28R, 30R, 32R) таким образом, что, когда такой рычаг принимает первое или второе рабочее положение (A_DOWN, A_UP) приводного рычага, соответствующий кинематический механизм принимает первую или вторую рабочую конфигурацию; и
- второго рабочего состояния, в котором приводной рычаг (10R) вхолостую перемещается между первым и вторым рабочим положением (A_DOWN, A_UP) приводного рычага так, что соответствующий кинематический механизм не может быть приведен во вторую рабочую конфигурацию.
2. Блокировочное устройство (2) по п.1, в котором каждый приводной рычаг (10L) выполнен с возможностью принятия второго рабочего состояния, когда другой приводной рычаг (10R) одновременно принимает первое рабочее состояние и второе рабочее положение (A_UP) приводного рычага.
3. Блокировочное устройство (2) по п.1 или 2, в котором первый кинематический механизм (22R, 24R, 26R, 28R, 30R, 32R) содержит первый передаточный элемент (26R) и первый переключающий элемент (32R), и в котором второй кинематический механизм (22L, 24L, 26L, 28L, 30L, 32L) содержит второй передаточный элемент (26L) и второй переключающий элемент (32L), при этом первый передаточный элемент (26R) выполнен с возможностью сцепления со вторым переключающим элементом (32L), а второй передаточный элемент (26L) выполнен с возможностью сцепления с первым переключающим элементом (32R).
4. Блокировочное устройство (2) по п.3, в котором:
- когда первый кинематический механизм (22R, 24R, 26R, 28R, 30R, 32R) соответственно принимает первую и вторую рабочую конфигурацию, первый передаточный элемент (26R) выполнен с возможностью, соответствующим образом, для принятия первого и второго рабочего положения передаточного элемента, и первый переключающий элемент (32R) выполнен с возможностью, соответствующим образом, принятия рабочего положения состояния готовности и рабочего положения препятствия; и
- когда второй кинематический механизм (22L, 24L, 26L, 28L, 30L, 32L) принимает указанные первую и вторую рабочую конфигурацию, второй передаточный элемент (26L) выполнен с возможностью, соответствующим образом, для принятия первого и второго рабочего положения передаточного элемента, и второй переключающий элемент (32L) выполнен с возможностью, соответствующим образом, принятия рабочего положения состояния готовности и рабочего положения препятствия;
причем первый переключающий элемент (32R), когда он принимает указанное положение препятствия, сцепляется со вторым передаточным элементом (26L) для предотвращения принятия таким передаточным элементом (26L) указанного второго рабочего положения передаточного элемента, и второй переключающий элемент (32L), когда он принимает указанное положение препятствия, сцепляется с первым передаточным элементом (26R) для предотвращения принятия таким передаточным элементом (26R) указанного второго рабочего положения передаточного элемента.
5. Блокировочное устройство (2) по п.4, в котором каждый из переключающих элементов (32R) является разъемно фиксируемым в положении препятствия, когда соответствующий приводной рычаг (10R) одновременно принимает второе рабочее положение (A_UP) приводного рычага и первое рабочее состояние, и является разблокируемым для переключения из положения препятствия в положение состояния готовности, когда соответствующий приводной рычаг (10R) принимает первое рабочее состояние и приводится в движение для переключения из второго рабочего положения приводного рычага в первое рабочее положение приводного рычага.
6. Блокировочное устройство (2) по п.4, в котором:
- каждый из кинематических механизмов (22R, 24R, 26R, 28R, 30R, 32R) содержит разъединяющий элемент (24R), приводимый в движение с тем, чтобы заставить соответствующий приводной рычаг (10R) принять второе рабочее состояние; и
- каждый из передаточных элементов (26R, 26L) содержит участок (49R, 49L) механического взаимодействия и разъединяющий участок (47R, 47L), при этом участок (49L) механического взаимодействия каждого из передаточных элементов (26L) выполнен с возможностью сцепления с переключающим элементом (32R) другого из кинематических механизмов (22R, 24R, 26R, 28R, 30R, 32R), когда такой элемент (32R) принимает положение препятствия, и разъединяющий участок (47L) каждого из передаточных элементов (26L) выполнен с возможностью сцепления с разъединяющим элементом (24L) соответствующего кинематического механизма (22L, 24L, 26L, 28L, 30L, 32L) для приведения в движение такого разъединяющего элемента (24L) и вынуждения соответствующего приводного рычага (10L) принять второе рабочее состояние.
7. Блокировочное устройство (2) по п.6, в котором:
- вслед за приведением в движение первого приводного рычага (10R) из первого рабочего положения приводного рычага по направлению ко второму рабочему положению приводного рычага, второй кинематический механизм (22L, 24L, 26L, 28L, 30L, 32L) принимает вторую рабочую конфигурацию, разъединяющий участок (47R) и участок (49R) механического взаимодействия первого передаточного элемента (26R) входят в одновременное сцепление, соответственно, с разъединяющим элементом (24R) первого кинематического механизма (22R, 24R, 26R, 28R, 30R, 32R) и переключающим элементом (32L) второго кинематического механизма (22L, 24L, 26L, 28L, 30L, 32L); и
- вслед за приведением в движение второго приводного рычага (10L) из первого рабочего положения приводного рычага по направлению ко второму рабочему положению приводного рычага, первый кинематический механизм (22R, 24R, 26R, 28R, 30R, 32R) принимает вторую рабочую конфигурацию, разъединяющий участок (47L) и участок (49L) механического взаимодействия второго передаточного элемента (26L) входят в одновременное сцепление, соответственно, с разъединяющим элементом (24L) второго кинематического механизма (22L, 24L, 26L, 28L, 30L, 32L) и переключающим элементом (32R) первого кинематического механизма (22R, 24R, 26R, 28R, 30R, 32R).
8. Блокировочное устройство (2) по п.3, в котором первый и второй передаточные элементы (26R, 26L) соответственно содержат, по меньшей мере, первый и, по меньшей мере, второй соединительный элементы (82R, 82L), выполненные, соответственно, с возможностью взаимодействия, по меньшей мере, с первым и, по меньшей мере, вторым взаимосвязывающим элементом (84R) для соединения указанных взаимосвязывающих элементов (84R) с кинематическими механизмами (22R, 24R, 26R, 28R, 30R, 32R; 22L, 24L, 26L, 28L, 30L, 32L), при этом первый взаимосвязывающий элемент (84R) выполнен с возможностью функционального размещения между первым кинематическим механизмом (22R, 24R, 26R, 28R, 30R, 32R) и механизмом для разъединения или размыкания первого автоматического выключателя (3R) и второй взаимосвязывающий элемент является подходящим для функционального размещения между указанным вторым кинематическим механизмом (22L, 24L, 26L, 28L, 30L, 32L) и механизмом для разъединения или размыкания второго автоматического выключателя (3L).
9. Блокировочное устройство (2) по п.3, содержащее по меньшей мере один опорный элемент (40) для по меньшей мере одного из кинематических механизмов (22R, 24R, 26R, 28R, 30R, 32R; 22L, 24L, 26L, 28L, 30L, 32L), при этом опорный элемент (40) размещен между первым (22R, 24R, 26R, 28R, 30R, 32R) и вторым кинематическим механизмом (22L, 24L, 26L, 28L, 30L, 32L) и включает в себя по меньшей мере одно сквозное отверстие (55) опорного элемента, подходящее для функционального одновременного прохождения первого и второго переключающего элемента (32R, 32L).
10. Блокировочное устройство (2) по п.1, в котором первый и второй кинематический механизм (22R, 24R, 26R, 28R, 30R, 32R; 22L, 24L, 26L, 28L, 30L, 32L) имеют, по существу, идентичное функционирование.
11. Блокировочное устройство (2) по п.1, содержащее средство для определения разомкнутого и замкнутого состояния указанных автоматических выключателей.
12. Узел автоматических выключателей и блокировочного устройства, содержащий первый автоматический выключатель (3R) электрической цепи, второй автоматический выключатель (3L) электрической цепи и блокировочное устройство (2) по любому из пп.1-11 для блокировки таких автоматических выключателей (3R, 3L).
| EP 1916682 B1, 19.08.2009 | |||
| Устройство для блокировки поворотных выключателей | 1982 |
|
SU1089647A1 |
| РАБОЧИЙ МЕХАНИЗМ АВТОМАТИЧЕСКОГО ВЫКЛЮЧАТЕЛЯ С БЛОКИРОВОЧНОЙ СИСТЕМОЙ | 1997 |
|
RU2154322C2 |
| БЛОКИРОВКА С ГЕОМЕТРИЧЕСКИМ ЗАМЫКАНИЕМ ДЛЯ ПРЕДОТВРАЩЕНИЯ ВКЛЮЧЕНИЯ ВЫКЛЮЧАТЕЛЯ | 2006 |
|
RU2368972C1 |
| Способ получения бисфенолов | 1987 |
|
SU1643519A1 |
| WO 2002050853 A1, 27.06.2002 | |||
| US 3767872 A1, 23.10.1973 | |||
| US 5790369 A1, 04.08.1998 | |||

