Область техники, к которой относится изобретение
Настоящее изобретение относится к шагающим роботам, а более конкретно к двуногому шагающему роботу, у которого предусмотрена возможность быстрого отделения ног от туловища и быстрого их присоединения к туловищу.
Уровень техники
В отношении шагающих роботов предлагались различные технологии, включая, например, технологию, описанную в выложенной патентной заявке Японии 3-184782.
В выложенной патентной заявке Японии 3-184782 с целью снижения инерционной массы ноги (звена ноги) источник движения (двигатель), приводящий в движение сустав (шарнир), который соединяет туловище с ногой, установлен на тазовой панели, являющейся одной из деталей туловища робота. С целью получения высокого передаточного отношения редуктора и увеличения эффективности использования места в шагающем роботе для снижения скорости движения (вращения) выходного органа привода и передачи движения к суставу обычно используют редуктор, имеющий высокое передаточное отношение шестерен и соосное расположение входа и выхода, например волновой привод Harmonic Drive (торговая марка волнового редуктора).
При вышеупомянутой технологии для того, чтобы снять ногу, требуется разобрать на составляющие элементы редуктор, установленный на тазовой панели (в случае привода Harmonic Drive - снять гибкое колесо и жесткое колесо), а при обратной сборке выполнить процедуру в обратном порядке, что затруднительно.
В частности, не всегда просто выполнять техническое обслуживание робота, так как гибкое колесо вставляется в жесткое колесо со сцеплением зубьев, поэтому разборка относительно проста, в то время как сборку необходимо проводить путем сцепления колес. Кроме того, при регулировке натяжения ремня, который передает движение от источника движения к редуктору, также требуется снимать с туловища робота тазовую панель, что также затруднительно.
Сущность изобретения
Таким образом, задачей настоящего изобретения является устранение вышеуказанных неудобств путем создания шагающего робота, в котором для упрощения его технического обслуживания упрощена система прикрепления/отъединения ног.
Второй задачей настоящего изобретения является создание шагающего робота, в котором обеспечен легкий доступ к механической передаче, осуществляющей передачу движущего усилия от источника движения, который приводит в действие сустав, соединяющий туловище с ногой, что позволяет при необходимости выполнять регулировку.
Третьей задачей настоящего изобретения является создание шагающего робота, в котором исключена возможность того, чтобы ноги мешали друг другу при их относительном перемещении, что дает больше свободы при формировании походки.
Для решения указанных задач согласно п.1 формулы изобретения предлагается шагающий робот, имеющий, по меньшей мере, туловище и несколько ног, каждая из которых шарнирно соединена с туловищем через сустав, отличающийся тем, что источники движения для привода суставов располагаются на каждой ноге.
Так как источник движения для привода сустава, соединяющего туловище с ногой, расположен на стороне ноги, ногу можно легко присоединять к туловищу робота и снимать с него, что упрощает техническое обслуживание ног шагающего робота.
Согласно п.2 формулы изобретения источник движения расположен со смещением относительно оси вращения сустава и соединен с суставом через механическую передачу.
Источник движения для привода сустава, соединяющего туловище с ногой, смещен относительно оси вращения сустава; а точнее, входной вал редуктора (т.е. ось вращения сустава) выполнен как параллельный вал, пространственно отнесенный от выходного вала источника движения (электродвигателя), а источник движения расположен с наружной стороны ноги в задней ее части относительно направления движения робота вперед. Кроме того, источник движения и сустав соединены через механическую передачу, например ремень.
Благодаря такой конструкции достигаются такие же преимущества и полезные эффекты, как и те, что описаны в п.1 формулы изобретения, нога может поворачиваться на желаемый угол, легко реализуется качательное и иное движение ноги, давая больше свободы при формировании походки.
Согласно п.3 формулы изобретения источник движения закрыт кожухом, и в кожухе выполнены отверстия, причем имеется отверстие в том месте кожуха, которое обращено к туловищу.
Источник движения закрыт кожухом, и одно отверстие, а точнее отверстие, в которое можно вставлять отвертку или иной подобный регулировочный инструмент, проделано в том месте кожуха, которое обращено к туловищу, вернее, находится вблизи верхнего конца ноги, в силу чего ремень или иные средства трансмиссии для привода сустава, соединяющего туловище с ногой, могут быть легко доступны оператору, а их техническое обслуживание упрощено.
Согласно п.4 формулы изобретения предлагается двуногий робот, имеющий, по меньшей мере, туловище и две ноги, каждая из которых шарнирно соединена с туловищем через сустав. Робот отличается тем, что источники движения для привода каждого из суставов располагаются с наружной стороны каждой ноги со смещением от оси вращения сустава, что исключает возможность того, чтобы ноги мешали друг другу при их относительном перемещении.
Двуногий робот скомпонован так, чтобы сместить источник движения для привода сустава от оси вращения самого сустава, расположить его с наружной стороны ноги, то есть источники движения, установленные на двух ногах, расположить с правой стороны правой ноги и с левой стороны левой ноги по отношению к направлению движения робота вперед, а точнее, расположить их позади, с левой и правой стороны, тем самым, исключая возможность того, чтобы ноги мешали друг другу при их относительном перемещении, и поэтому ноги можно поворачивать на желаемые углы, легко реализуется качательное и иное их движение, давая больше свободы при формировании походки.
Перечень чертежей
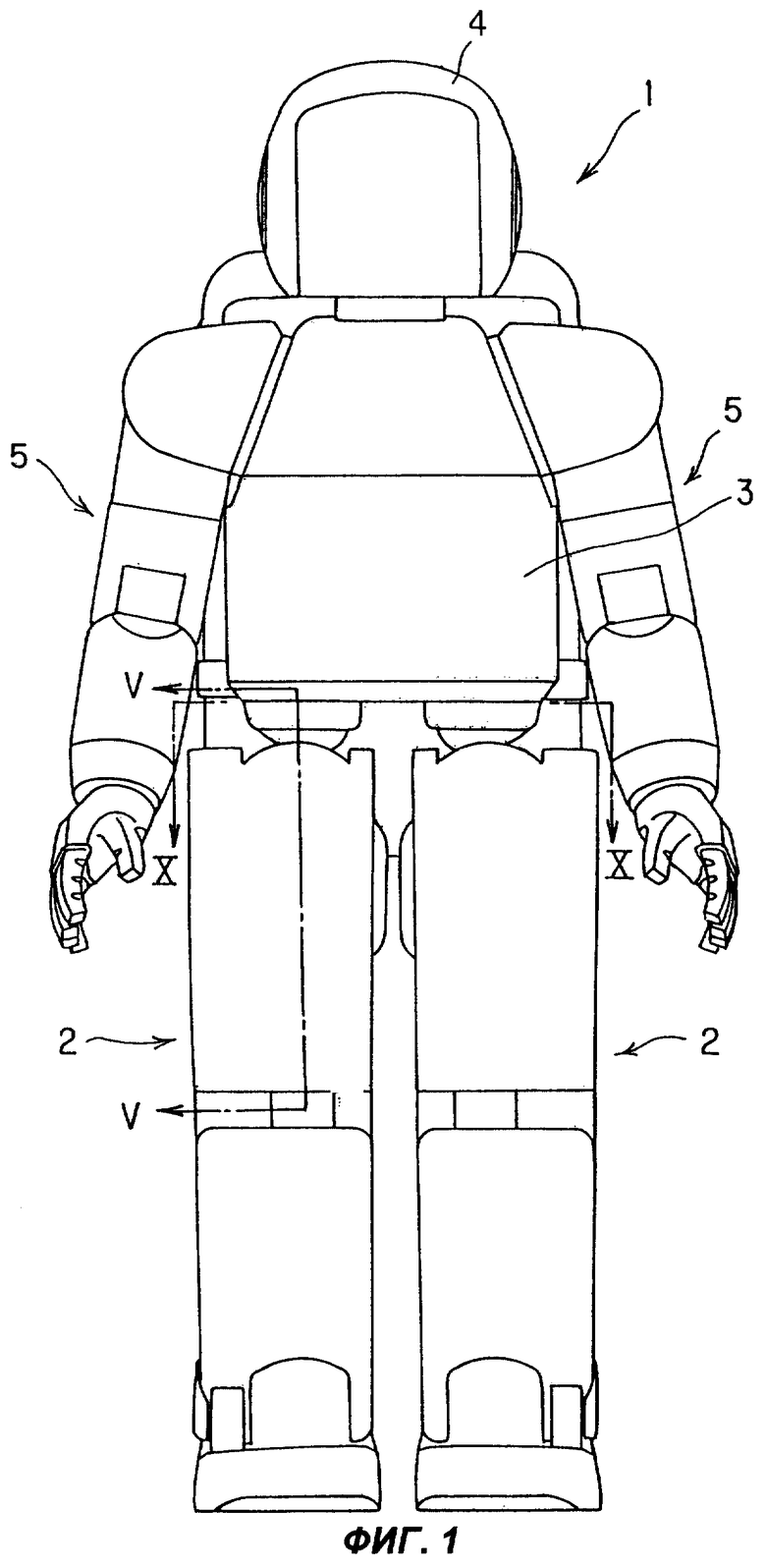
Фиг.1 изображает фронтальную проекцию шагающего робота в соответствии с одним вариантом осуществления настоящего изобретения.
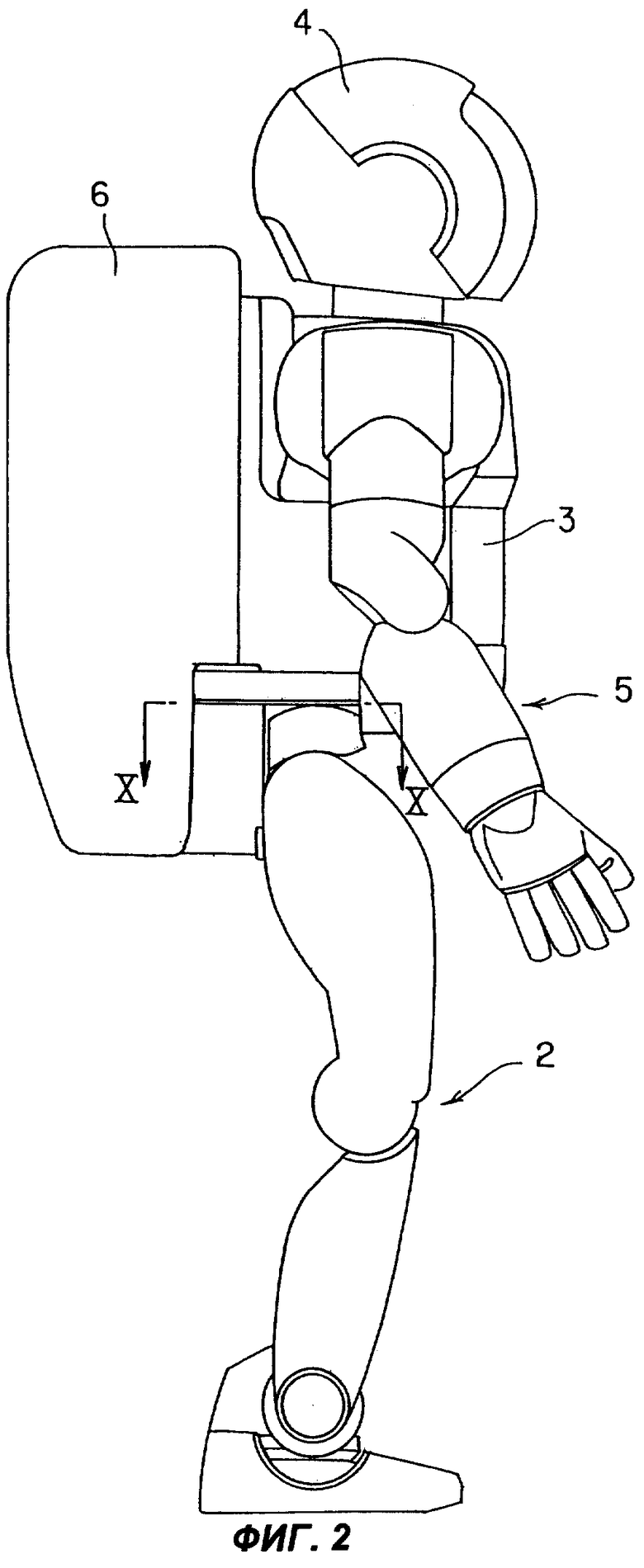
Фиг.2 представляет собой вид слева шагающего робота, показанного на фиг.1.
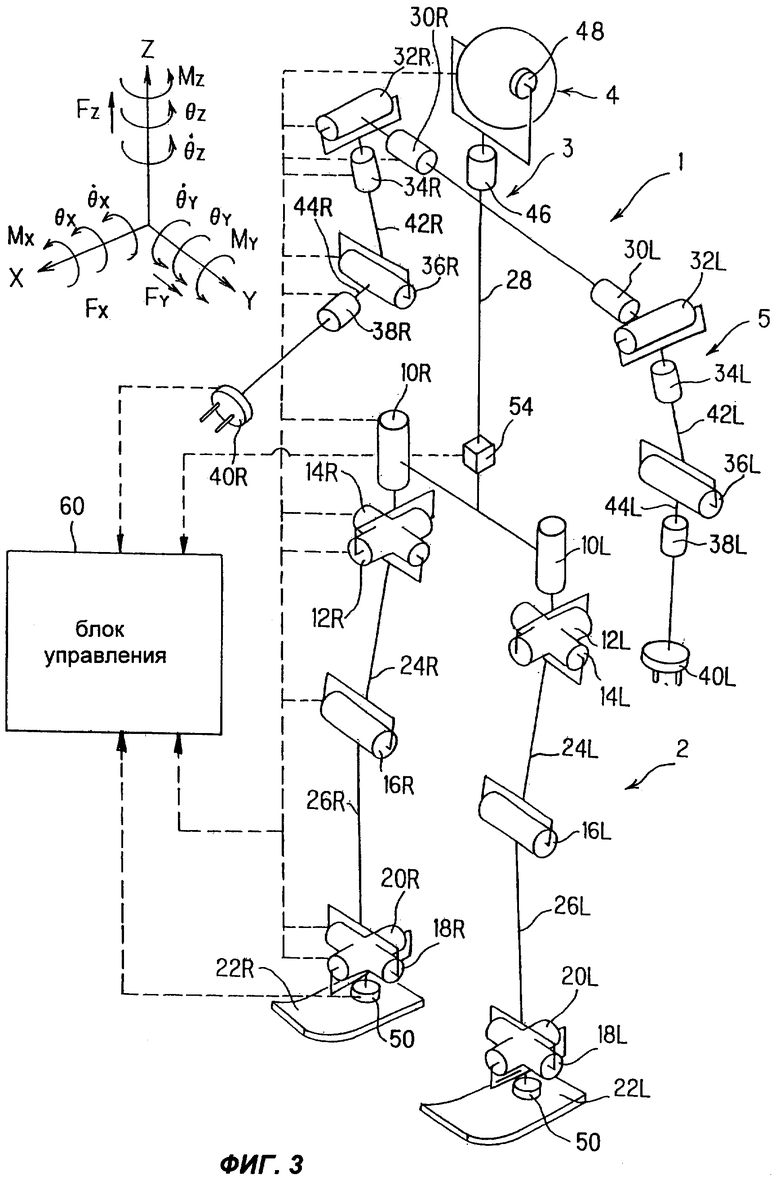
Фиг.3 представляет собой кинематическую схему, показывающую общее внутреннее устройство двуногого робота, соответствующего фиг.1, в которой внимание сосредоточено на суставах.
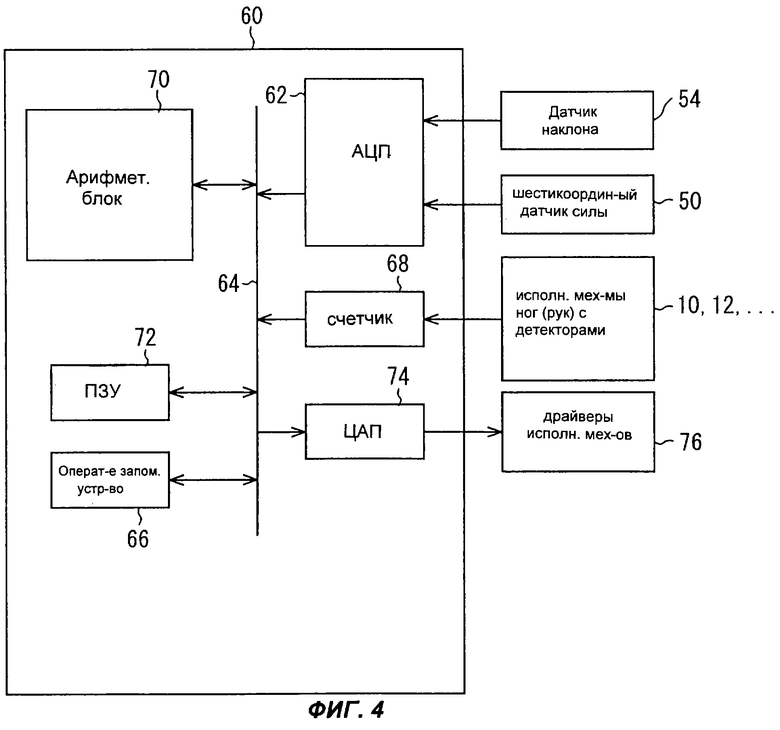
Фиг.4 представляет собой блок-схему, подробно показывающую блок управления, представленный на фиг.3.
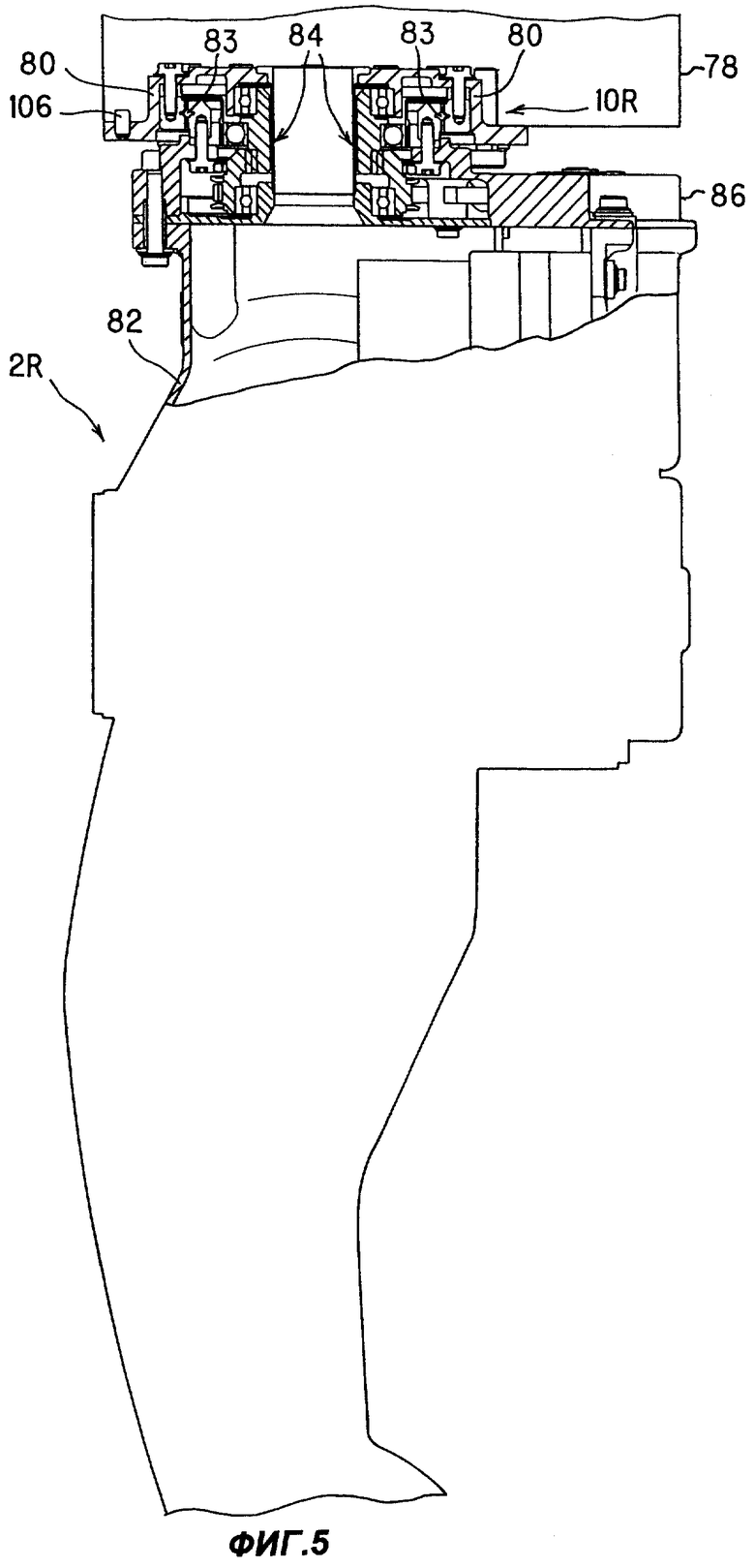
Фиг.5 представляет собой частичный вид в разрезе по линии V-V фиг.1.
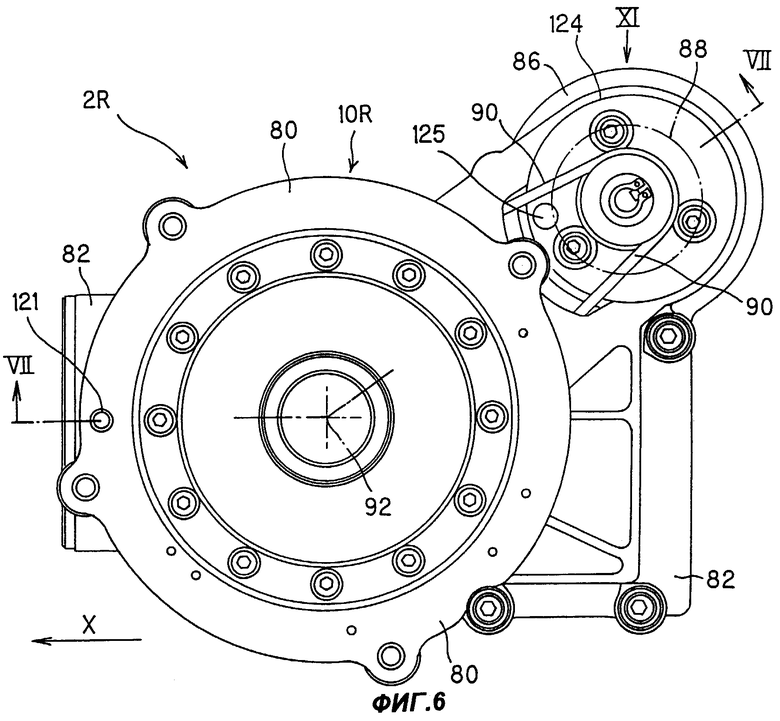
Фиг.6 представляет собой вид сверху правой ноги после того, как было снято туловище.
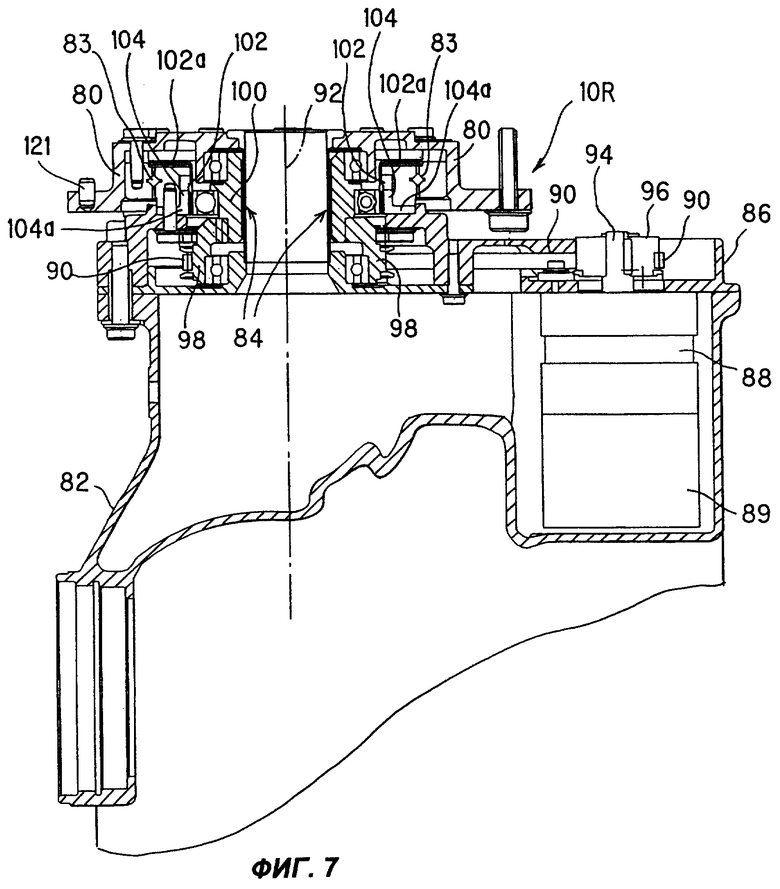
Фиг.7 представляет собой вид в разрезе по линии VII-VII фиг.6.
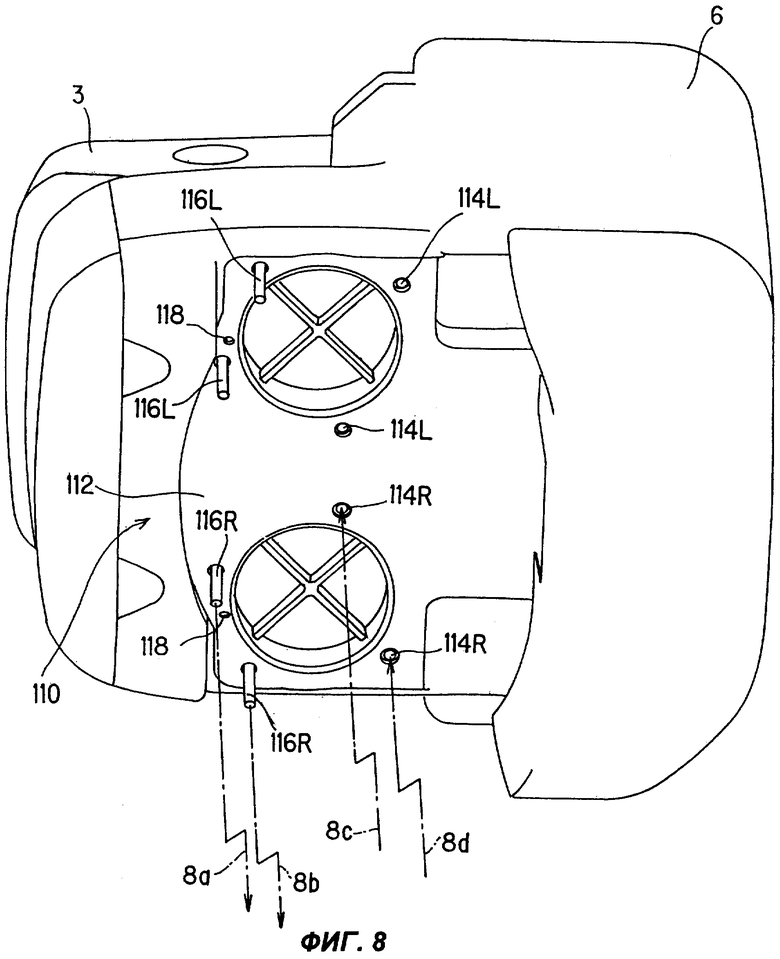
Фиг.8 представляет собой перспективное изображение двуногого робота, показанного на фиг.1 и других фигурах, если смотреть на его туловище по диагонали снизу.
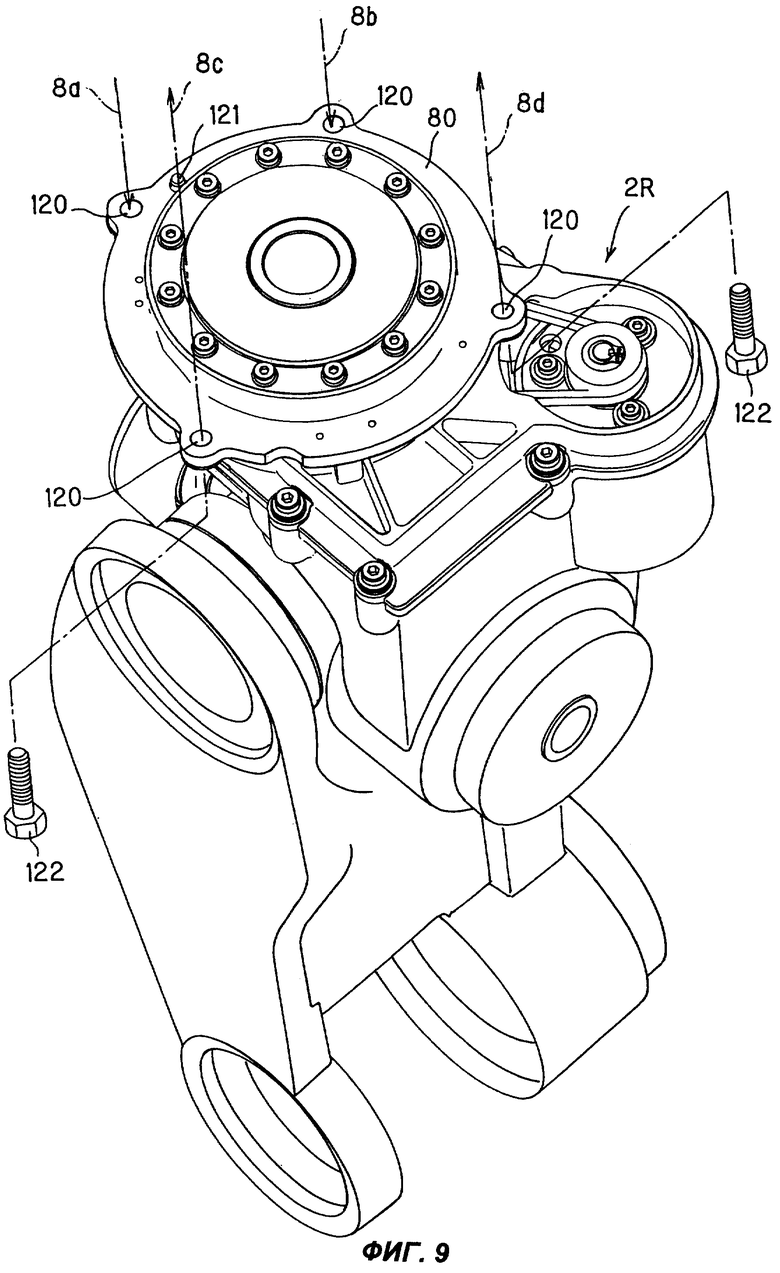
Фиг.9 представляет собой верхнюю, перспективную проекцию, если смотреть по диагонали сверху на правую ногу робота, показанного на фиг.6.
На фиг.10 показана группа видов в разрезе по линиям Х-Х фигур 1 и 2.
Фиг.11 представляет собой частичный увеличенный вид узла, который на фиг.6 обозначен символом XI.
Фиг.12 представляет собой перспективную проекцию для объяснения взаимного расположения туловища робота и ноги при регулировке натяжения ремня (средств механической передачи).
Сведения, подтверждающие возможность осуществления изобретения
Ниже описан шагающий робот, соответствующий варианту осуществления настоящего изобретения, со ссылками на прилагаемые чертежи.
Фиг.1 представляет собой фронтальную проекцию шагающего робота 1 (в дальнейшем, “робота”), соответствующего варианту осуществления настоящего изобретения, а фиг.2 - его боковую проекцию. В качестве примера шагающего робота взят двуногий робот.
Как показано на фиг.1, робот 1 оснащен двумя ногами 2 (звеньями ног), над которыми пристроено туловище 3 (верхнее туловище). К верхней части туловища 3 пристроена голова 4, а к противоположным сторонам туловища присоединены звенья двух рук 5. Далее, как показано на фиг.2, на стороне спины туловища 3 установлен контейнер 6, внутри которого, среди прочего, размещается блок управления (описывается в дальнейшем) и батарейный источник питания (не показан) для электродвигателей (источников движения; описываются в дальнейшем) привода суставов робота 1. Робот 1 на фиг.1 и 2 показан с установленными кожухами, защищающими его внутреннюю конструкцию.
Теперь, со ссылкой на фиг.3, будет объяснено внутреннее устройство робота 1, причем внимание будет главным образом сосредоточено на суставах.
Как показано на фигуре, правая и левая нога 2 робота 1, каждая оснащена шестью суставами.
В число этих двенадцати суставов входят суставы 10R, 10L (индексы R и L означают правую и левую стороны; в дальнейшем эти индексы употребляются с одним и тем же смыслом), обеспечивающие движение бедра вокруг вертикальной оси (оси Z, или оси действия силы тяжести) для разворота ноги, тазобедренные суставы 12R, 12L (промежностные), обеспечивающие крен относительно оси Х (т.е. наклон влево - вправо), тазобедренные суставы 14R, 14L (промежностные), обеспечивающие дифферент относительно оси Y (т.е. наклон вперед - назад), коленные суставы 16R, 16L, обеспечивающие качание вокруг оси Y, голеностопные суставы 18R, 18L, обеспечивающие качание вокруг оси Y, и голеностопные суставы 20R, 20L, обеспечивающие крен относительно оси X. Стопы 22R, 22L (детали стопы) прикрепляются к нижним элементам звеньев 2R(L) ног.
Таким образом, каждая нога 2 содержит тазобедренные (промежностные) суставы 10 R(L), 12 R(L) и 14 R(L), коленный сустав 16R(L) и голеностопные суставы 18 R(L) и 20 R(L). Тазобедренные суставы и коленный сустав соединены посредством звена 24 R(L) бедра, а коленный сустав и голеностопные суставы - посредством звена 26 R(L) голени.
Ноги (звенья ног) 2 через тазобедренные суставы присоединены к туловищу 3, которое на фиг.3 представлено просто звеном 28 туловища. Как говорилось выше, к туловищу 3 присоединяются звенья 5 рук.
Звенья 5 рук содержат плечевые суставы 30R, 30L, обеспечивающие наклон плеч вперед - назад, плечевые суставы 32R, 32L, обеспечивающие наклон плеч влево - вправо, суставы 34R, 34L, обеспечивающие поворот плеч вокруг вертикальной оси, локтевые суставы 36R, 36L, обеспечивающие движение локтей вокруг оси качания, и суставы 38R, 38L, обеспечивающие поворот запястий вокруг вертикальной оси. Кисти рук (захватные устройства) 40R, 40L прикрепляются к наружной стороне запястий.
Таким образом, каждая рука 5 содержит плечевые суставы 30 R(L), 32 R(L), 34 R(L), локтевой сустав 36 R(L) и лучезапястный сустав 38 R(L). Далее, плечевые суставы и локтевой сустав соединяются посредством звена 42 R(L) плечевой части руки, а локтевой сустав и кисть руки - посредством звена 44 R(L) предплечья.
Голова 4 содержит шейный сустав 46, обеспечивающий ее вращение вокруг вертикальной оси, и механизм 48 для вращения головы 4 вокруг горизонтальной оси (кивания). Оптический датчик (не показан), содержащий ПЗС-камеру или подобное устройство, размещается внутри головы 4 в качестве датчика окружающей обстановки.
Благодаря вышеупомянутой конфигурации ноги 2 наделены в общей сложности 12 степенями свободы (правая и левая нога), так что в процессе передвижения, ногам в целом можно сообщать желаемые виды движений путем поворота двенадцати суставов на соответствующие углы, что позволяет получать желаемое шагающее движение в трехмерном пространстве. Кроме того, каждой руке 5 дается пять степеней свободы (правой и левой руке), что позволяет путем поворота суставов руки на соответствующие углы выполнять требуемые операции.
Под голеностопным суставом к элементу 22R(L) стопы прикреплен стандартный, шестикоординатный датчик 50 силы, который из всех внешних сил, действующих на робот, измеряет составляющие Fx, Fy и Fz силы реакции пола в трех направлениях, а также составляющие моментов Мx, My и Mz по трем направлениям, воздействующих на робот со стороны поверхности контакта.
На туловище 3 установлен датчик наклона 54 для измерения наклона относительно вертикальной оси и его угловой скорости. Далее, электродвигатели соответствующих суставов перемещают друг относительно друга звенья 24, 26 R(L) и др. посредством редукторов (описываются в дальнейшем), которые понижают скорость вращения и увеличивают на своих выходах крутящий момент, при этом для измерения углов поворота предусмотрены датчики угловых перемещений (на фиг.3 опущены).
Как упоминалось ранее, блок 60 управления, содержащий микрокомпьютер, вместе с другими компонентами помещен в контейнер 6, при этом выходные сигналы от шестикоординатного датчика 60 силы и других датчиков (для упрощения изображения показаны только те сигналы, которые поступают только с правой стороны робота) посылаются в блок 60 управления.
На фиг.4 представлена блок-схема, в подробностях показывающая структуру блока 60 управления.
Как видно из фигуры, блок 60 управления содержит микрокомпьютер. Выходные сигналы от датчика 54 наклона и других датчиков преобразуются в цифровые сигналы посредством аналого-цифрового преобразователя 62 (на чертеже обозначен “A/D”), данные с выхода которого через шину 64 пересылаются в оперативную память 66 (RAM). Далее, данные с выходов датчиков перемещения, которые связаны с электродвигателями в местах соответствующих суставов, подаются в RAM через счетчик 68.
В блоке 60 управления предусмотрен арифметический блок 70, состоящий из блока центрального процессора (CPU). На основе данных, которые хранятся в постоянном запоминающем устройстве 72 (ROM), и данных с выходов датчиков арифметический блок 70 вычисляет управляющие величины (значения сигналов управления), необходимые для приведения суставов в движение, и передает их на двигатели привода суставов через цифроаналоговый преобразователь 74 (на чертеже обозначен “D/A”) и драйверы 76 (усилители) исполнительных механизмов, которые предусмотрены в индивидуальных суставах.
Данный вариант осуществления изобретения отличается тем, что в роботе 1, оснащенном несколькими, а точнее двумя, ногами 2R(L), каждая из которых присоединяется к туловищу 3 через соответствующие суставы 10 R(L) и может вращаться вокруг вертикальной оси бедра и поворачиваться в тазобедренных суставах, реализуется компоновка, позволяющая легко прикреплять/отъединять ноги 2 R(L) от туловища 3 за счет того, что источники движения (электродвигатели;описываются в дальнейшем), предназначенные для привода суставов 10 R(L), расположены на боковых сторонах ног 2 R(L).
Далее будет описано устройство сустава 10R(L) со ссылкой на фиг.5, на которой показана правая нога 2R.
Фиг.5 представляет собой вид в разрезе по линии V-V фиг.1, а именно частичный вид в разрезе ноги 2R робота 1; фиг.6 представляет собой вид сверху правой ноги 2R после того, как было снято туловище 3; фиг.7 представляет собой поясняющий вид в разрезе по линии VII-VII фиг.6. С целью упрощения описания на фиг.6 и 7 показана только область, ближняя к суставу 10R.
Как показано на фиг.5 и 6, сустав 10R, осуществляющий поворот ноги вокруг вертикальной оси бедра, установлен вблизи верхнего конца ноги 2R. Сустав 10R оснащен соединительной деталью 80, которая предназначена для крепления к туловищу 3 и на которой выполнены болтовые отверстия (объясняются в дальнейшем), а также каркасным элементом 82, соединяющим сустав 10R с суставом 12R.
Соединительная деталь 80 и элемент 82 соединяются через подшипник 83 качения и имеют возможность вращаться друг относительно друга, при этом приводная сила для их относительного вращения прикладывается со стороны редуктора, а точнее волнового привода 84 (Harmonic Drive). Элемент 86 (корпус), к которому крепится электродвигатель, выполнен как единое целое с элементом 82, при этом источник движения, а точнее электродвигатель 88 (на фиг.6 показан штрихпунктирной линией) помещен внутрь элемента 86. Угол поворота вала электродвигателя 88 определяется датчиком 89 углового перемещения, а приводное усилие передается к волновому приводу 84 (Harmonic Drive) через ремень 90 (механическая передача).
Устройство сустава 10R будет далее объяснено подробнее со ссылкой на фиг.7.
Шкив 96 (элемент механической передачи) закреплен на выходном валу 94 электродвигателя 88, который помещен в определенном месте внутри элемента 86, предназначенного для крепления двигателя, а ремень 90 обернут вокруг шкива 96 и имеет определенное натяжение. Другой конец ремня 90 обернут вокруг шкива 98 (элемента механической передачи), установленного на входе волнового привода 84 (Harmonic Drive). Шкив 98 закреплен на генераторе 100 волн так, что вращается с ним соосно. Следовательно, приводное усилие от электродвигателя 88 передается к волновому приводу 84 (Harmonic Drive) через ремень 90.
Генератор 100 волн вставлен в гибкое колесо 102, а выходная часть 102а гибкого колеса 102 закреплена на стороне соединительной делали 80, в то время как выходная часть 104а жесткого колеса 104 закреплена на стороне элемента 82. Гибкое колесо вставлено внутрь жесткого колеса, и их зубья находятся в зацеплении.
В суставе 10R, когда приводное усилие от электродвигателя 88 через ремень 90 подводится к волновому приводу, возникает движение гибкого колеса 102 (т.е. соединительной детали 80) относительно жесткого колеса 104 (т.е. элемента 82) в соответствии с хорошо известным принципом волновой передачи.
Более конкретно все можно объяснить на следующем примере, если посмотреть на привод сверху, как на фиг.6. Когда электродвигатель 88 вращается по часовой стрелке, приводное усилие передается через шкив 96, ремень 90 и шкив 98 и вращает генератор 100 волн по часовой стрелке. Когда гибкое колесо 102 приводится в движение против часовой стрелки, а жесткое колесо - по часовой стрелке, соединительная деталь 80 и элемент 82, к которым прикреплены выходные части 102а и 104а, двигаясь относительно друг друга, вращаются против часовой стрелки и по часовой стрелке, вследствие чего нога 2R относительно туловища 3 вращается по часовой стрелке.
Описание устройства других суставов, кроме сустава 10R ноги 2R, таких как суставы 12, 14 и др., опущено, и эти суставы также не показаны на фиг.5 и других чертежах, так как они приблизительно такие же, как суставы, описанные в выложенной патентной заявке Японии 3-184782. Кроме того, также опущено и описание левой ноги 2L, так как ноги 2R(L) являются симметричными в поперечном направлении.
Прикрепление ног 2R(L) к туловищу 3 и их отделение от туловища оператором описано далее со ссылками на фиг.8 и 9.
Фиг.8 представляет собой перспективное изображение туловища 3, если смотреть на него по диагонали снизу, а на фиг.9 представлена верхняя, перспективная проекция правой ноги 2R робота, если смотреть на нее по диагонали сверху. С целью упрощения описания при показе туловища 3 на фиг.8 опущено изображение головы 4 и звеньев рук 5R(L) и связанных с ними обозначений.
Как показано на фиг.8, на поверхности 112 тазовой панели 110 на нижней стороне туловища 3, которая предназначена для крепления ног, выполнены болтовые отверстия 114R(L) для крепления при помощи болтов ног 2R(L) и установлены шпильки 116 R(L), которые выступают над указанной поверхностью. В соответствующих местах поверхности 112 сделаны установочные отверстия 118.
Как показано на фиг.9, в соединительной детали 80 ноги 2R(L), в местах, соответствующих болтовым отверстиям 114R(L) и шпилькам 116R(L), выполнены болтовые отверстия 120 для крепления ноги 2R к туловищу. Кроме того, на верхней поверхности соединительной детали 80 (поверхности, обращенной к поверхности 112 крепления ног) предусмотрены выступающие элементы 121 в местах, соответствующих установочным отверстиям 118.
Чтобы присоединить ногу 2R к корпусу 3, вначале шпильки 116R на стороне туловища 3 вставляют в болтовые отверстия 120 по штрихпунктирным линиям 8а и 8b, показанным на фиг.8 и 9, а выступающий элемент 121 вводят в установочное отверстие 118, чем окончательно фиксируют местоположение ноги, после чего с нижней стороны соединительной детали 80 на шпильки 116R наворачивают гайки (не показаны) и затягивают их. Затем, с нижней стороны соединительной детали 80 сквозь болтовые отверстия 120 по штрихпунктирным линиям 8с, 8d пропускают болты 122, заворачивают в болтовые отверстия 114R и затягивают. Таким образом, крепление ноги 2 к туловищу 3 заканчивается.
Как указывалось ранее, когда в прототипе шагающего робота осуществлялось присоединение ноги к тазовой панели из-за того, что источник движения располагался на тазовой панели, приходилось производить сборку (сцепление) гибкого и жесткого колес, что делало эту работу затруднительной. Напротив, у робота 1, соответствующего настоящему изобретению, благодаря тому, что электродвигатель 88 располагается сбоку ноги 2R(L), когда производится отъединение ноги 2R(L) от туловища 3, нет необходимости производить разборку составляющих элементов волнового привода 84 (Harmonic Drive); и от того, что для присоединения ноги 2R(L) требуется лишь закрепить ее болтами, техническое обслуживание робота может быть более простым.
Так как при отделении ноги 2R от туловища 3 нет необходимости думать о ее позиционировании и подобных проблемах, достаточно лишь отвернуть гайки со шпилек 116 R, и болты 122.
Возвращаясь к описанию фиг.6, электродвигатель 88 располагается со смещением от оси 92 вращения сустава 10R. Более конкретно, выходной вал (ось) электродвигателя 88 и выходная ось волнового привода 84 (Harmonic Drive) (т.е. ось 92 вращения сустава) образуют пространственно разнесенные параллельные оси, при этом электродвигатель 88 располагается в задней части наружной стороны ноги, если смотреть в направлении движения робота 1 вперед. Кроме того, электродвигатель 88 располагается в задней части правой наружной стороны ноги 2R, если смотреть в направлении движения робота 1 вперед (в направлении оси X), и соединяется с суставом 10R через ремень 90.
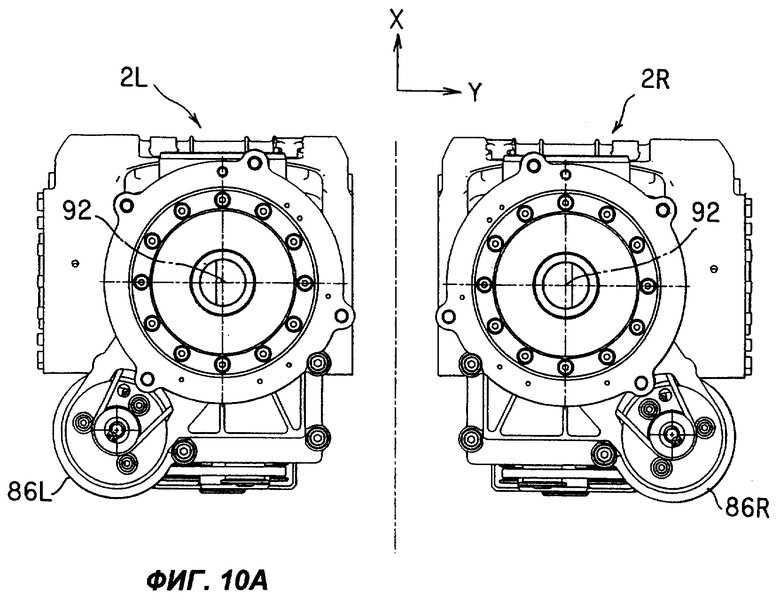
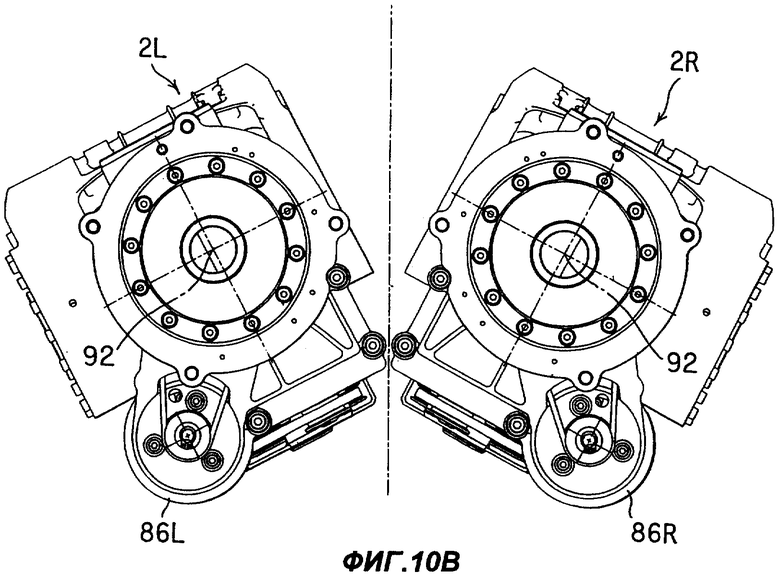
Далее будет описано действие робота 1 при его повороте со ссылками на фиг.6, а также 10(а) и 10(b).
Фигуры 10(а) и (b) представляют собой виды в разрезе ног 2R(L) по линиям Х-Х фиг.1 и 2. Чтобы сосредоточить внимание на суставах 10R(L), на чертежах показаны только области, прилегающие к суставу, а изображение стопы 22R(L) и прочих элементов опущено.
Чтобы облегчить выполнение роботом 1 поворотов и таким образом дать больше свободы при формировании его походки, необходимо скомпоновать суставы 10R(L) так, чтобы ноги 2R(L) и непоказанные стопы 22R(L) могли поворачиваться из положения, показанного на фиг.10(а), на требуемый угол, как показано на фиг.10(b).
Поэтому, как говорилось ранее, в данном варианте осуществления изобретения электрические двигатели 88 располагаются со смещением от осей 92 вращения суставов 10R(L). Точнее, электродвигатели 88 располагаются на наружных сторонах ног 2R(L) с задней стороны по отношению к движению робота вперед (в направлении оси X) и соединены с суставами 10R(L) через ремень 90 механической передачи.
За счет этого, как показано на фиг.10(b), ноги 2R(L) могут поворачиваться на требуемые углы так, что левая и правая ноги 2R(L) не мешают друг другу, в силу чего достигается ранее указанная цель изобретения.
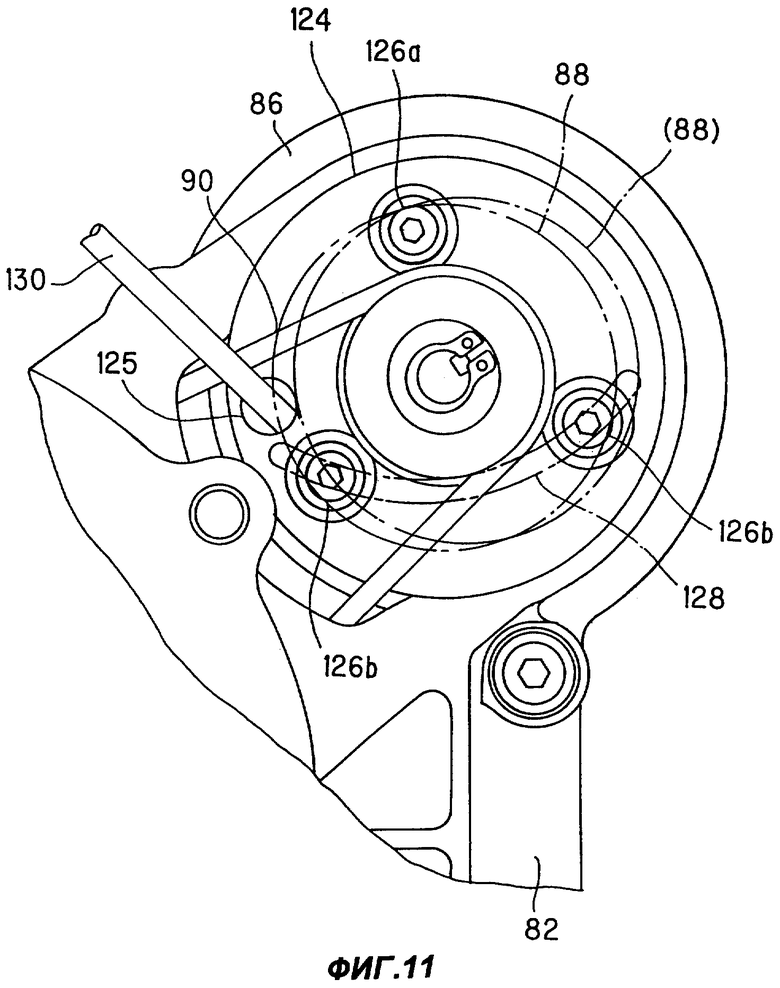
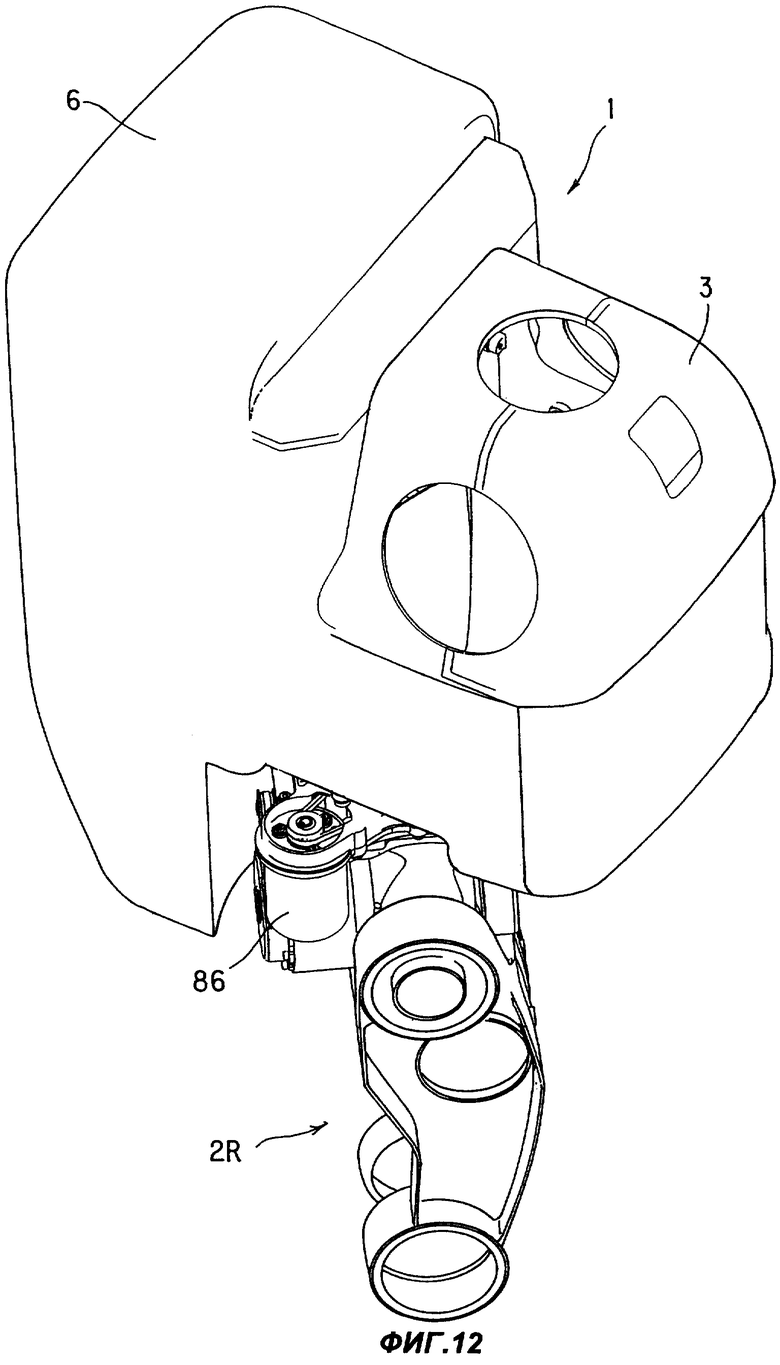
Возвращаясь опять к описанию фиг.6, далее, со ссылками на фиг.11 и 12, будет приведено описание регулировки натяжения ремней 90 для передачи движущего усилия от электродвигателей 88 к волновым приводам 84 (Harmonic Drive).
Натяжение ремней 90 может ослабнуть из-за их старения, и в таком случае между шкивами 96 и генераторами 100 волн возникает проскальзывание. Так как электродвигатель 88 на каждой стороне оснащен одним из датчиков 89 углового перемещения, то в случае такого проскальзывания возможно ухудшение управляемости, ибо происходит не только снижение передаваемой мощности, но также возникает рассогласование (ошибка) между значением команды, которая подана на электродвигатель 88, и числом оборотов, которое фактически подается на генератор 100 волн.
Элемент 86, предназначенный для крепления электродвигателя 88 и охватывающий его, выполнен такой формы, что в нем имеется вырез (окно) 124 в том месте, которое обращено к туловищу 3. Более конкретно, как показано на фиг.11, которая представляет собой частичный, увеличенный вид области, окружающей деталь, которая на фиг.6 обозначена символом XI, элемент 86, предназначенный для крепления двигателя, сформирован в определенном месте так, что обращен к туловищу 3 вырезом 124, и, кроме того, в нем сделано отверстие 125 (окно) для того, чтобы вставлять регулировочный инструмент для выставления положения электродвигателя 88.
Электродвигатель 88 крепится на верхней стороне элемента 86 посредством болтов 126а, 126b. На самом деле, окно 124 закрывается крышкой (не показана), которую можно открывать/закрывать в процессе регулировки ремня 90.
Болт 126а завертывается в непоказанное крепежное отверстие, а болты 126b можно передвигать вдоль прорези 128, которая показана на чертеже линией воображаемого контура. Таким образом, когда требуется отрегулировать натяжение ремня 90, вначале ослабляют болты 126а, 126b, после чего в отверстие 125 для регулировочного инструмента вставляют какой-либо инструмент, например отвертку 130, и сдвигают положение электродвигателя 88. Электродвигатель разворачивают, используя в качестве оси вращения крепежный болт 126а, сдвигая двигатель, например, в положение, обозначенное, как (88), и осуществляя посредством этого регулировку натяжения ремня 90.
Благодаря тому что вырезы 124 сделаны в таких местах, что оказываются обращенными в сторону туловища 3, доступ к ремням 90 и их регулировка осуществляются путем разворота ног 2 (показана только правая нога, R) в положение, показанное на фиг.12, без отделения ног 2R(L) от туловища 3 и последующего их присоединения к туловищу.
Как указывалось ранее, в роботе 1, соответствующем данному варианту осуществления изобретения, благодаря тому что электродвигатель 88 располагается на боковой стороне ноги 2R(L), ногу 2R(L) можно легко присоединять к туловищу 3 и легко отделять от него. Таким образом, в случае регулировки ноги техническое обслуживание ноги 2R(L) шагающего робота 1 оказывается более простым.
Кроме того, благодаря тому что электрический двигатель 88 располагается со смещением от оси 92 вращения сустава 10R(L), а точнее располагается на наружной боковой стороне сзади, если смотреть в направлении движения робота вперед (в направлении оси X), и соединяется с суставом 10R(L) через ремень 90, ногу 2R(L) может поворачивать на желаемый угол, легко совершать поворот робота и подобные движения, что дает больше свободы при формировании походки.
Далее, так как в элементе 86, предназначенном для крепления электродвигателя и охватывающем электродвигатель 88, сделан вырез 124 в том месте, которое обращено к туловищу робота, регулировку натяжения ремня 90 можно осуществлять, не снимая тазовую панель 110 с туловища 3, т.е. когда робот 1 находится в вертикальном положении или когда зафиксирован на стенде (не показан).
Как указывалось ранее, в данном варианте осуществления изобретения в шагающем роботе 1, содержащем, по меньшей мере, туловище 3 и несколько ног 2R(L), каждая из которых соединена с туловищем через сустав 10R(L), источники движения (электродвигатели 88) для привода сустава располагаются на каждой ноге.
Далее, компоновка робота 1 выполнена так, что источник движения располагается со смещением от оси 92 сустава и связан с суставом через механическую передачу (ремень 90).
Кроме того, компоновка шагающего робота выполнена так, что источник движения закрыт кожухом (элементы 86 крепления двигателя), и этот кожух содержит вырезы (окна 124, отверстия 125 для регулировочного инструмента) в том месте, где кожух обращен к туловищу.
Затем, двуногий робот, содержащий, по меньшей мере, туловище 3 и две ноги 2, каждая из которых соединена с туловищем через сустав 10R(L), отличается тем, что источник движения (электродвигатели 88) для привода сустава располагается на наружной стороне каждой ноги со смещением от оси 92 вращения сустава, в силу чего исключается ситуация, когда две ноги могли бы мешать друг другу при их относительном движении (фиг.10(b)).
Несмотря на то что тазобедренные суставы для поворота ног были определены, как суставы для вращения вокруг вертикальной оси (оси Z или оси действия силы тяжести), это не следует считать ограничением, ибо существенным является то, что поскольку компоновка суставов, соединяющих ноги с туловищем, предусматривает расположение источников движения с боковой стороны каждой ноги, эти суставы могут, например, являться такими суставами, оси вращения которых наклонены относительно вертикальной оси.
Хотя в качестве механической передачи в настоящем изобретении использованы ремни и шкивы, вместо них могут быть использованы и другие средства механической передачи, такие как шестеренчатые механизмы и аналогичные.
Несмотря на то что описание настоящего изобретения сделано в отношении двуногого робота, оно также распространяется и на роботы с числом ног, большим, чем две.
Промышленная применимость
Согласно настоящему изобретению упрощена процедура прикрепления ног робота к туловищу и процедура отделения ног от туловища с целью упрощения технического обслуживания ног шагающего робота. Кроме того, ноги можно поворачивать на желаемый угол, что облегчает процедуру поворота робота, давая больше свободы при формировании его походки. Далее, к ремню и другим элементам механической передачи привода суставов, соединяющих туловище с ногами, обеспечен легкий доступ, что также упрощает техническое обслуживание. Также, ноги можно поворачивать на желаемый угол, что облегчает выполнение операции поворота робота и других сходных операций и дает больше свободы при формировании его походки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУНОГИЙ РОБОТ | 2001 |
|
RU2257995C2 |
| СПОСОБ ОЦЕНКИ РЕАКЦИЙ ОПОРЫ И СПОСОБ ОЦЕНКИ МОМЕНТОВ СУСТАВОВ ДВУНОГОГО ШАГАЮЩЕГО ТЕЛА | 2002 |
|
RU2296668C2 |
| СПОСОБ ОЦЕНКИ РЕАКЦИЙ ОПОРЫ И СПОСОБ ОЦЕНКИ МОМЕНТОВ СУСТАВОВ ДВУНОГОГО ШАГАЮЩЕГО ТЕЛА | 2002 |
|
RU2272705C2 |
| СУСТАВ РУКИ РОБОТА | 2013 |
|
RU2564799C2 |
| ВЗРЫВОЗАЩИЩЕННЫЙ ШАГАЮЩИЙ РОБОТ | 2023 |
|
RU2832153C1 |
| КОНСТРУКЦИЯ НОГИ РОБОТА, ПЕРЕДВИГАЮЩЕГОСЯ НА НОГАХ | 2001 |
|
RU2241595C1 |
| УСТРОЙСТВО, ОБЛЕГЧАЮЩЕЕ ХОДЬБУ | 2007 |
|
RU2413490C2 |
| СИСТЕМА ЗАЩИТЫ ОТ ЗАЩЕМЛЕНИЯ В РОБОТЕ-ГУМАНОИДЕ | 2015 |
|
RU2684026C2 |
| ТАЗОБЕДРЕННЫЙ СУСТАВ ЭКЗОСКЕЛЕТА | 2013 |
|
RU2549015C2 |
| УСТРОЙСТВО ПРЕДВАРИТЕЛЬНОГО ПОЗИЦИОНИРОВАНИЯ И РАЗЪЕМНОГО КРЕПЛЕНИЯ ШАРНИРНЫХ ЭЛЕМЕНТОВ РОБОТА-ГУМАНОИДА | 2015 |
|
RU2669132C2 |
Изобретение относится к шагающим роботам и более конкретно к двуногому шагающему роботу. Шагающий робот содержит, по меньшей мере, туловище и несколько ног, каждая из которых шарнирно соединяется с туловищем через сустав. Источники движения для привода суставов расположены на каждой ноге со смещением от оси вращения сустава и соединены с суставом через механическую передачу. Источники движения закрыты кожухом, и в этом кожухе сделан вырез в том месте, где кожух обращен к туловищу. Изобретение позволит упростить систему присоединения и отсоединения ног, обеспечить легкий доступ к механической передаче, осуществляющей передачу движущего усилия от источника движения, который приводит в действие сустав, соединяющий туловище с ногой, что позволяет при необходимости выполнять регулировку. А также изобретение позволит поворачивать ноги на желаемый угол, даст большую свободу при формировании походки робота и исключит возможность того, чтобы ноги мешали друг другу в процессе их относительного перемещения. 2 н. и 2 з.п. ф-лы, 12 ил.
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US 6064167 A, 16.05.2000 | |||
| МОБИЛЬНЫЙ ШАГАЮЩИЙ РОБОТ | 1992 |
|
RU2057046C1 |

