0Область техники, к которой относится изобретение
Настоящее изобретение касается двуногого робота, точнее методики определения размера двуногого робота, а более конкретно, двуногого робота, в котором высота установки плечевых суставов (шарниров) и т.п. от поверхности пола определяется оптимальным образом в соответствии с высотой группы предметов, над которыми должно совершаться действие, и тем самым увеличивается эффективность действий робота в существующем операционном пространстве.
Уровень техники
Заявитель настоящего изобретения является мировым лидером в области исследований и разработок, направленных на создание двуногих роботов, способных ходить, очень сильно напоминая человеческие существа. Среди двуногих роботов, предложенных заявителем на настоящее время, уже действуют такие образцы, которые могут устойчиво ходить по горизонтальной плоскости, вверх и вниз по уклону, стоять на одной ноге, подниматься и спускаться по ступеням лестницы, преодолевать перепады высот, то есть реализованы двуногие роботы, способные адаптироваться к различным условиям передвижения.
Реализована возможность использования рук, присоединенных к туловищу робота, для таких операций, как затягивание винтов и гаек при помощи инструмента для завинчивания (отвертки) или гаечного ключа, и, кроме того, посредством систематического, согласованного движения рук и ног стало возможным выполнение сложных действий, таких как открывание/закрывание дверей и прохождение через двери, толкание ручных тележек. Такие операции являются результатом координации движений рук и ног, координации высокого порядка, и можно сказать, что это является главной особенностью, заметно повышающей сходство таких роботов с человеком.
Таким образом, двуногие роботы - предмет исследований и разработок заявителя - уже заменяют людей при выполнении различных операций в существующих местах, где совершаются такие операции (в домашних условиях, на предприятиях и т.п.), и впервые в истории предлагают свой потенциал, чтобы сосуществование роботов с людьми стало подлинной реальностью.
Однако в своих исследованиях и разработках двуногих роботов заявитель задавал высоту роботов (суммарную длину в вертикальном направлении, когда робот находится в выпрямленной позе) величиной от 1600 до 1800 мм, примерно как средний рост взрослого человека, преследуя при этом цель не только сделать их движения при ходьбе максимально близкими к движениям человека, но и сделать их облик более близким к человеческому.
Кроме того, предлагались различные технологии, касающиеся двуногих роботов, в том числе выдвигались разные предложения в отношении их размера. В таких статьях, как "Design and Development of Research Platform for Perception-Action Integration in Humanoid Robot: H6" (5-й симпозиум по робототехнике) и "Preliminary Motion Experiments of a Humanoid Robot Saika-3" (18-я ежегодная конференция Общества робототехники Японии), например, предлагается придавать роботам высоту от 1200 до 1300 мм с точки зрения возможности выполнения ими действий в имеющемся операционном пространстве и достижения малого размера и небольшого веса.
При попытке ввода в действие в имеющемся операционном пространстве двуногого робота высотой приблизительно от 1600 до 1800 мм (высотой, которую до сих пор принимал заявитель), возникает ряд неудобств. Одно, которое можно упомянуть, это величина энергопотребления от батарей. Кроме того, увеличение высоты сопровождается увеличением веса, но, когда рассматривается вопрос сосуществования роботов с людьми дома, на предприятии и т.п., то оказывается предпочтительным иметь наименьший возможный вес.
Затем существует много предметов, над которыми необходимо производить действия (работать) в операционном пространстве, особенно в условиях дома, которые эргономически расположены на высотах, облегчающих их использование не только взрослыми, но также и детьми, пользователями инвалидных колясок и другими людьми, так что нельзя утверждать, что размер робота, близкий к среднему росту взрослого человека (точнее, высота расположения плечевых суставов робота, определенная на основе среднего роста, а еще точнее, амплитуда хода руки (по высоте), зависящая от высоты плечевых суставов), обязательно соответствует высоте расположения предметов, с которыми роботу необходимо работать. Более того, в интересах лучшей совместимости с людьми желательно, чтобы робот был такого размера, какой делал бы его более приятным для людей, и с этой точки зрения также нельзя утверждать, что размер, близкий к среднему росту взрослого человека, непременно отвечает этим требованиям.
С другой стороны, добиться снижения веса и повысить привлекательность робота можно, если принять его высоту близкой 1200-1300 мм, как указывалось в упомянутых предшествующих работах. Однако дело заключается в том, что в упомянутых прототипах не был рассмотрен вопрос о высоте расположения суставов при фактическом выполнении операций, а также вопросы, связанные с размером робота, такие как длина звена руки и т.п., и когда такой робот был поставлен на фактическое выполнение операций, он был просто уменьшен в масштабе без оптимизации его высоты по отношению к предметам, что сделало эффективность его действий низкой и привело к тому, что остались неразрешенными следующие различные проблемы.
Например, у рук робота, имеющих несколько степеней свободы (в двуногом роботе, у рук и ног; плечевые суставы рук здесь представляют особый интерес), в общем случае имеются такие положения, которые ограничивают движение рук или ног (далее подобные положения суставов будут называться "особыми положениями). Из соображений эффективности функционирования робота, при определении порядка работы этих особых (ограничивающих движение) положений желательно избегать.
Кроме того, при выполнении различных видов операций необходимо точно устанавливать положение предмета посредством оптического датчика; поэтому необходимо всесторонне учитывать относительное пространственное положение оптического датчика и предмета.
Сущность изобретения
Таким образом, задача настоящего изобретения заключается в устранении вышеупомянутых неудобств и касается двуногого робота, в котором высота установки плечевых суставов и т.п. от поверхности пола определяется оптимальным образом в соответствии с высотой группы предметов, с которыми должен работать робот, в силу чего увеличивается эффективность его работы в имеющемся операционном пространстве.
Чтобы разрешить упомянутые проблемы, согласно п.1 формулы изобретения, предлагается двуногий робот, имеющий, по меньшей мере, одно туловище, два ножных звена или механизма, называемых далее «две ноги», каждая из которых шарнирно соединена с туловищем посредством тазобедренного сустава, два ручных звена или механизма, называемых далее «две руки», каждая из которых шарнирно соединена с туловищем посредством плечевого сустава, так что робот, шагая, перемещается по поверхности пола в операционном пространстве за счет поворота ног и совершает действия над предметами в операционном пространстве за счет приведения в движения, по меньшей мере, рук; робот отличается тем, что, если он находится в вертикально выпрямленной позе (положении), то высоту от поверхности пола, которой касаются концы ног робота, до плечевых суставов определяют так, чтобы она попадала в диапазон значений, заданный на основе средней величины, полученной путем усреднения высот расположения предметов над поверхностью пола и стандартного отклонения σ этой средней величины.
Благодаря тому, что двуногий робот скомпонован так, что высота от поверхности пола, которой касаются концы ног, до плечевых суставов, когда робот находится в вертикально выпрямленной позе, попадает в диапазон значений, заданный на основе средней величины, полученной путем усреднения высот расположения предметов, на которые должно быть направлено действие робота, над поверхностью пола и стандартного отклонения σ этой средней величины, высота установки плечевых суставов от поверхности пола может быть определена оптимальным образом, в соответствии с высотами положения предметов, в силу чего эффективность работы робота в имеющемся операционном пространстве может быть увеличена.
Более конкретно, предельный размах (высота подъема) рук, соединенных через плечевые суставы, может быть установлен оптимальным образом посредством оптимизации высоты плечевых суставов, соответственно высотам расположения группы предметов, над которыми должны совершаться действия, и тем самым может быть увеличена эффективность работы робота по отношению к этим предметам.
Согласно п.2 формулы изобретения двуногий робот компонуют так, что вышеупомянутый диапазон составляет от 700 до 1000 мм.
Благодаря тому, что двуногий робот компонуют так, что высота расположения плечевых суставов лежит в диапазоне от 700 до 1000 мм, эффективность действий робота по отношению к группе предметов, с которыми роботу надлежит работать в условиях дома, т.е. предметов, расположенных на высотах, удобных для пользования всеми, от взрослого до ребенка, пользователями инвалидных колясок и т.п., может быть значительно увеличена. Далее определение высоты плечевых суставов от поверхности пола, до некоторой степени, косвенно определяет и общий размер робота, включая его высоту. Задание высоты плечевых суставов вышеупомянутым образом в диапазоне от 700 мм до 1000 мм также помогает получить двуногий робот привлекательного внешнего вида, ибо высота робота, если ему надлежит имитировать человеческое существо, должна составлять приблизительно от 1000 до 1300 мм.
Согласно п.3 формулы изобретения конфигурацию двуногого робота делают такой, что каждая рука состоит, по меньшей мере, из плеча, шарнирно соединенного с туловищем через плечевой сустав, и локтя, шарнирно соединенного с плечом через локтевой сустав, при этом длину плеча каждой руки определяют на основе стандартного отклонения σ.
Конфигурацию двуногого робота делают такой, что каждая рука состоит, по меньшей мере, из плеча, шарнирно соединенного с туловищем через плечевой сустав, и локтя, шарнирно соединенного с плечом через локтевой сустав, при этом длину плеча каждой руки определяют на основе стандартного отклонения σ высот группы предметов, и поэтому длина плеча каждой руки может быть определена оптимальным образом в соответствии с высотами расположения предметов, чтобы работу робота с этими предметами сделать еще эффективнее.
Говоря точнее, эффективность работы робота с предметами можно дополнительно увеличить, если установить такую длину плеча каждой руки, какая позволит увеличить степень свободы плеча в том интервале высот, в котором велика плотность распределения высот расположения предметов.
Согласно п.4 формулы изобретения предлагается двуногий робот, имеющий, по меньшей мере, одно туловище, две ноги, каждая из которых шарнирно соединена с туловищем через тазобедренный сустав, и две руки, каждая из которых шарнирно соединена с туловищем через плечевой сустав и на своем наружном конце оснащена кистью, так что робот за счет поворота ног шагает по поверхности пола в операционном пространстве, и совершает в операционном пространстве действия над предметами путем приведения в движение, по меньшей мере, рук. При этом робот по изобретению отличается тем, что, если он находится в вертикально выпрямленной позе (положении), а его плечевые суставы принимают особое положение, которое ограничивает их движение, то высоту от поверхности пола, которой касаются концы ног робота, до кистей его рук, устанавливают так, чтобы она не попадала в диапазон значений, заданный на основе средней величины, полученной путем усреднения высот расположения предметов над поверхностью пола и стандартного отклонения σ этой средней величины (более подробное рассмотрение особых положений суставов будет приведено в разделе "Сведения, подтверждающие возможность осуществления изобретения").
Конфигурацию двуногого робота делают такой, чтобы высота от поверхности пола, которой касаются концы ног робота, до кистей его рук, когда робот находится в вертикально выпрямленной позе, а плечевые суставы принимают особое положение, не попадала в диапазон значений, заданный на основе средней величины, полученной путем усреднения высот расположения предметов над поверхностью пола и стандартного отклонения σ этой средней величины, а точнее, конфигурацию робота делают такой, чтобы ни одно из особых положений плечевых суставов не попадало в область, в которой плотность распределения высот расположения предметов, с которыми должен работать робот, велика, и поэтому в указанной области может быть увеличена степень свободы рук и тем самым может быть дополнительно увеличена эффективность работы робота с предметами.
Согласно п.5 формулы изобретения предлагается двуногий робот, имеющий, по меньшей мере, туловище, две ноги, каждая из которых шарнирно соединена с туловищем через тазобедренный сустав две руки, каждая из которых шарнирно соединена с туловищем через плечевой сустав и на своем наружном конце оборудована кистью, и голову, шарнирно соединенную с туловищем через шейный сустав, и оснащенную оптическим датчиком, состоящим из формирователя видеосигнала, так что робот за счет поворота ног, шагая, передвигается по поверхности пола в операционном пространстве и совершает в этом операционном пространстве действия над предметами путем приведения в движение рук, основываясь, по меньшей мере, на информации об операционном пространстве, полученной из изображения, образованного формирователем видеосигнала; робот отличается тем, что формирователь видеосигнала устанавливается таким образом, что оптические оси, соединяющие кисти рук с формирователем видеосигнала, образуют с горизонтальным направлением углы в диапазоне от 5 до 45 градусов, когда руки расположены горизонтально, параллельно поверхности пола, а робот находится в вертикально выпрямленном положении.
Конфигурацию робота делают такой, что формирователь видеосигнала устанавливается таким образом, что оптические оси, соединяющие кисти рук с формирователем видеосигнала, когда руки робота расположены горизонтально, параллельно поверхности пола, образуют с горизонтальным направлением углы в диапазоне от 5 до 45 градусов, т.е. точно определяя, что углы, под которыми формирователь видеосигнала видит предметы, - это углы, лежащие в диапазоне от 5 до 45 градусов. Когда такой двуногий робот находится в вертикально выпрямленной позе, можно осуществлять постоянное, устойчивое распознавание изображения и, тем самым, дополнительно увеличить эффективность работы робота с предметами.
Согласно п.6 формулы изобретения двуногий робот компонуют таким образом, что высота от поверхности пола, которой касаются нижние концы ног, до плечевых суставов лежит в диапазоне от 700 до 1000 мм, а формирователь видеосигнала устанавливают так, что разность между высотой плечевых суставов и высотой формирователя изображения от поверхности пола лежит в диапазоне от 150 до 250 мм, когда робот находится в вертикально выпрямленной позе.
Благодаря тому, что двуногий робот компонуют таким образом, что высота от поверхности пола, которой касаются нижние концы ног, до плечевых суставов лежит в диапазоне от 700 до 1000 мм, а формирователь видеосигнала устанавливают так, что разность между высотой плечевых суставов и высотой формирователя изображения от поверхности пола лежит в диапазоне от 150 до 250 мм, когда робот находится в вертикально выпрямленной позе, эффективность работы робота с предметами в условиях дома, т.е. предметами, установленными на высотах, облегчающих их использование всеми, от взрослых до детей, пользователями инвалидных колясок и т.п., может быть значительно увеличена. Кроме того, определение вышеупомянутым образом разности высоты плечевых суставов и высоты формирователя видеосигнала над поверхностью пола позволяет осуществлять постоянное, устойчивое распознавание изображения, тем самым дополнительно увеличивая эффективность работы робота с предметами. Вдобавок, высота робота оказывается равной приблизительно от 1000 до 1300 мм, что помогает создать двуногий робот, имеющий привлекательный внешний вид.
Перечень фигур чертежей
Фиг.1 представляет собой фронтальную проекцию двуногого робота, соответствующего варианту осуществления настоящего изобретения.
Фиг.2 представляет собой вид справа двуногого робота, показанного на фиг.1.
Фиг.3 представляет собой схему, показывающую общее, внутреннее устройство двуногого робота по фиг.1, на которой все внимание сосредоточено на суставах.
Фиг.4 изображает блок-схему, показывающую подробности устройства блока управления, представленного на фиг.3.
Фиг.5 представляет собой фронтальную проекцию, показывающую, в числе прочего, высоту плечевых суставов двуногого робота фиг.1.
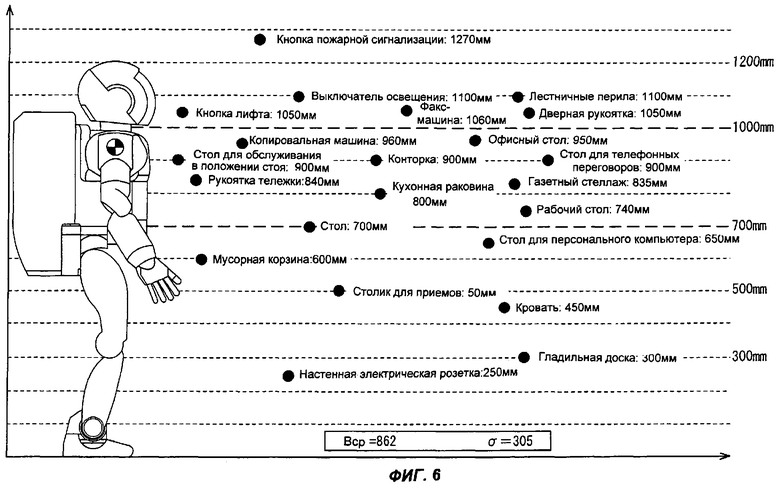
Фиг.6 представляет собой поясняющий вид, показывающий высоты группы предметов, над которыми должны совершаться действия; предметов, с которыми работает робот, изображенный на фиг.1.
Фиг.7 представляет собой фронтальную проекцию, показывающую, в числе прочего, высоту особых положений плечевых суставов двуногого робота, изображенного на фиг.1.
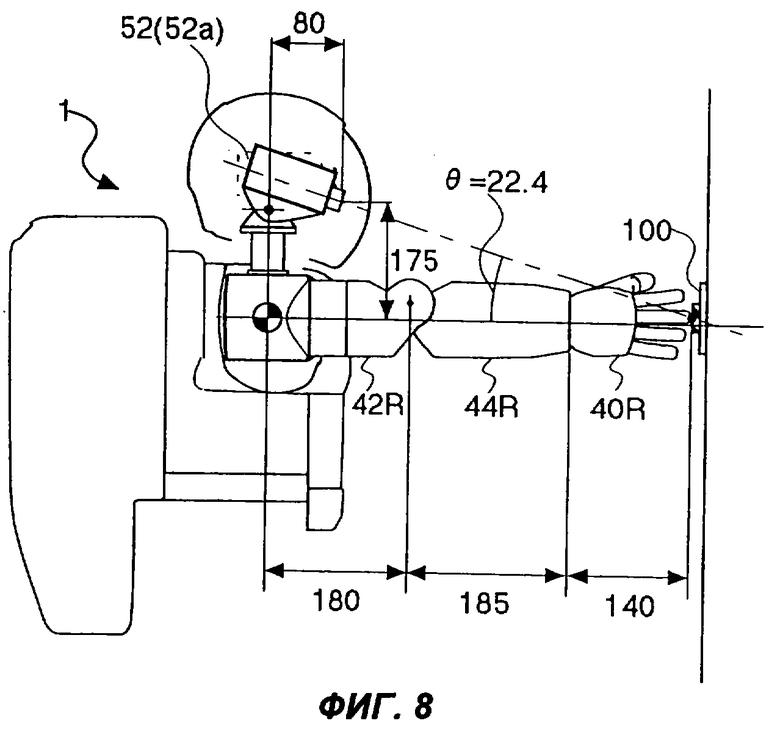
Фиг.8 представляет собой частичную боковую проекцию, показывающую, среди прочего, соотношение между высотой плечевых суставов и оптического датчика двуногого робота, изображенного на фиг.1.
Сведения, подтверждающие возможность осуществления изобретения
Ниже описан шагающий робот, соответствующий варианту осуществления настоящего изобретения, со ссылками на прилагаемые чертежи.
Фиг.1 представляет собой фронтальную проекцию двуногого робота 1 (в дальнейшем, просто «робота»), соответствующего варианту осуществления настоящего изобретения, а фиг.2 - его боковую проекцию.
Как показано на фиг.1, робот 1 оснащен двумя ногами 2 (звеньями ног), над которыми пристроено туловище 3 (верхнее туловище). К верхней части туловища 3 пристроена голова 4, а к противоположным сторонам туловища 3 присоединены звенья двух рук 5 (звенья рук). Далее, как показано на фиг.2, на стороне спины туловища 3 установлен контейнер 6, внутри которого, среди прочего, размещается блок управления (описывается в дальнейшем) и батарейный источник питания (не показан) для электродвигателей привода суставов робота 1, которые являются источниками движения и описываются в дальнейшем. Робот 1 на фиг.1 и 2 показан с установленными кожухами, защищающими его внутреннюю конструкцию.
Теперь, со ссылкой на фиг.3, будет описано внутреннее устройство робота 1, причем внимание будет главным образом сосредоточено на суставах.
Как показано на чертеже, правая и левая ноги 2 робота 1 оснащены шестью суставами каждая.
В число этих двенадцати суставов входят суставы 10R, 10L (индексы R и L означают правую и левую стороны соответственно; в дальнейшем эти индексы употребляются с одним и тем же смыслом), обеспечивающие движение бедра вокруг вертикальной оси (оси Z, или оси действия силы тяжести) для разворота ноги, тазобедренные суставы 12R, 12L (промежностные), обеспечивающие крен туловища робота (поворот вокруг оси X, т.е. наклон влево - вправо), тазобедренные суставы 14R, 14L (промежностные), обеспечивающие наклон туловища робота вперед - назад (вокруг оси Y), коленные суставы 16R, 16L, обеспечивающие качание вокруг оси Y, голеностопные суставы 18R,18L, обеспечивающие качание вокруг оси Y, и голеностопные суставы 20R, 20L, обеспечивающие крен вокруг оси X. Стопы 22R, 22L (элементы стопы) прикрепляются к нижним элементам звеньев 2R(L) ног.
Таким образом, каждая нога 2 содержит тазобедренные (промежностные) суставы 10R(L), 12R(L) и 14R(L), коленный сустав 16R(L) и голеностопные суставы 18R(L) и 20R(L). Тазобедренные суставы и коленный сустав соединены посредством звена 24R(L) бедра, а коленный сустав и голеностопные суставы - посредством звена 26R(L) голени.
Ноги (звенья ног) 2 через тазобедренные суставы присоединены к туловищу 3, которое на фиг.3 представлено просто звеном 28 туловища. Как говорилось выше, к туловищу 3 присоединяются звенья 5 рук.
Звенья 5 рук содержат плечевые суставы 30R, 30L, обеспечивающие наклон плеч вперед-назад, плечевые суставы 32R, 32L, обеспечивающие поворот плеч в поперечной плоскости, суставы 34R, 34L, обеспечивающие поворот рук вокруг вертикальной оси, локтевые суставы 36R, 36L, обеспечивающие движение локтей вокруг оси качания, и суставы 38R, 38L, обеспечивающие поворот запястий вокруг вертикальной оси. Кисти рук (захватные устройства) 40R, 40L прикрепляются к наружной стороне запястий.
Таким образом, каждая рука 5 содержит плечевые суставы 30R(L), 32R(L), 34R(L), локтевой сустав 36R(L) и лучезапястный сустав 38R(L). Далее плечевые суставы и локтевой сустав соединяются посредством звена 42R(L) плечевой части руки, а локтевой сустав и кисть руки - посредством звена 44R(L) предплечья.
Глова 4 соединяется с туловищем 3 через шейный шарнир 46, обеспечивающий ее вращение вокруг вертикальной оси, и через механизм 48 для поворота головы 4 вокруг горизонтальной оси (кивания).
Благодаря вышеупомянутой конфигурации ноги 2 наделены в общей сложности 12 степенями свободы (правая и левая нога), так что в процессе передвижения ногам в целом можно сообщать желаемые виды движений путем поворота двенадцати суставов на соответствующие углы, что позволяет получать желаемое шагающее движение в трехмерном пространстве. Кроме того, каждой руке 5 дается пять степеней свободы (правой и левой руке), что позволяет, путем поворота суставов руки на соответствующие углы, выполнять требуемые операции. Дополнительно голове 4 даны две степени свободы, и ее можно поворачивать в желаемом направлении, соответственным образом переводя на определенные углы сустав 46 и/или механизм 48 поворота головы.
Под голеностопным суставом к стопе 22R(L) прикреплен обычный шестикоординатный датчик 50 силы, который из всех внешних сил, действующих на робот, измеряет составляющие Fx, Fy и Fz силы реакции пола в трех направлениях, а также составляющие моментов Mx, My и Mz по трем направлениям, воздействующих на робот со стороны поверхности контакта.
Далее в соответствующем месте головы 4 установлен оптический датчик 52 с параллельной оптической осью, состоящий из двух формирователей 52а видеосигнала (ПЗС-камеры; 250 тысяч пикселей) (показан только один формирователь) для получения изображения операционного пространства в направлениях, соответствующих повороту головы 4.
Для измерения наклона относительно вертикальной оси, а отсюда и угловой скорости на туловище 3 установлен датчик наклона 54. Далее электродвигатели соответствующих суставов перемещают друг относительно друга звенья 24, 26 R(L) и др. посредством редукторов, которые понижают скорость вращения и увеличивают на своих выходах крутящий момент, при этом для измерения углов поворота предусмотрены датчики угловых перемещений (не показаны).
Как уже упоминалось, блок 60 управления, содержащий микрокомпьютер, вместе с другими компонентами помещен в контейнер 6, при этом выходные сигналы от шестикоординатного датчика 60 силы и других датчиков (для упрощения изображения показаны только те сигналы, которые поступают только с правой стороны робота) посылаются в блок 60 управления.
На фиг.4 представлена блок-схема, в подробностях показывающая структуру блока 60 управления.
Как видно из фигуры, блок 60 управления содержит микрокомпьютер. Выходные сигналы от датчика 54 наклона и других датчиков преобразуются в цифровые сигналы посредством аналого-цифрового преобразователя 62 (на чертеже обозначен «A/D»), данные с выхода которого через шину 64 пересылаются в оперативную память 66 (RAM). Далее данные с выходов датчиков перемещения, которые связаны с электродвигателями в местах соответствующих суставов, подаются в RAM через счетчик 68.
В блоке 60 управления предусмотрен арифметический блок 70, состоящий из блока центрального процессора (CPU); и на основе данных, которые хранятся в постоянном запоминающем устройстве 72 (ROM), и данных с выходов датчиков арифметический блок 70 вычисляет управляющие величины (значения сигналов управления), необходимые для приведения суставов в движение, и передает их на двигатели привода суставов через цифроаналоговый преобразователь 74 (на чертеже обозначен «D/A») и драйверы 76 (усилители) исполнительных механизмов, которые предусмотрены в индивидуальных суставах. Выходной сигнал оптического датчика 52 подается в непоказанный на фигуре процессор для обработки изображений, и после прохождения соответствующей обработки сигнал подается в блок 60 управления в качестве информации об окружающей обстановке, в особенности информации о положении в операционном пространстве и положении предметов, с которыми должен работать робот, и используется, помимо прочего, для расчета углов поворота (управляющих воздействий) соответствующих суставов.
Далее со ссылками на фиг.5-8 будет дано описание, касающееся определения положения (высоты) и т.п. плечевых суставов робота 1, соответствующего настоящему изобретению.
Фиг.5 представляет собой фронтальную проекцию, показывающую, в числе прочего, высоту плечевых суставов двуногого робота фиг.1, взятую от пола.
Прежде чем продолжать пояснение фиг.5, следует, со ссылками на фиг.6, дать описание, касающееся предметов или изделий, над которыми робот 1, в соответствии с настоящим вариантом осуществления изобретения, должен совершать свои действия (работать). Назначением робота 1, в соответствии с данным вариантом осуществления изобретения, является выполнение легкой работы преимущественно в условиях дома (термин «в условиях дома» приведен здесь в широком смысле и охватывает офисы и т.п.). В качестве предметов для легкой работы в условиях дома можно, например, упомянуть те предметы, которые показаны на фиг.6. Связь между предметами и высотой их положения над уровнем пола, согласно фиг.6, соответствует рекомендациям промышленных стандартов Японии (JIS) для строительства, которые, помимо значений, указанных на фиг.6, также предписывают высоту положения, например, плечиков для вешания одежды и большого числа других предметов домашнего обихода.
Как можно видеть из фиг.6, многие предметы, с которыми должен работать робот в условиях дома, распределены в пределах вполне определенного диапазона высот, точнее, в диапазоне от 700 до 1100 мм. Теперь, если взять среднее значение высоты Вср группы предметов, над которыми должны совершаться действия, то получится величина, около 862 мм (однако следует отметить, что эта усредненная величина включает в себя рекомендованные высоты различных других изделий, помимо тех предметов (с которыми должен работать робот), что показаны на фиг.6). Кроме того, если по формуле для вычисления стандартного отклонения вычислить стандартное отклонение σ распределения этих предметов, то получится величина около 305 мм (которая, подобно Вср, также не ограничивается только предметами, показанными на фиг.6). Также можно сказать, что предметы сосредоточены в зоне со средним значением Вср±1/2 стандартного отклонения σ (от 709,5 до 1014, 5 мм). Обычно такую тенденцию можно часто наблюдать на предприятиях и в других местах человеческой деятельности.
Далее будет рассмотрена высота плечевых суставов робота 1 над уровнем пола (а именно высота от места касания концами ног робота поверхности пола, т.е. от нижней части стопы 22L(R)), которая совместима с упомянутыми предметами. Когда робот 1 является двуногим роботом, имитирующим человеческое существо, то стоит установить высоту плечевых суставов над поверхностью пола, то сразу же, с точки зрения внешнего вида робота, появляются ограничения для высоты, длины звеньев рук 5 и т.п. Как только будет задана приблизительная длина рук, то также, исходя из предельного хода плечевых и локтевых суставов, будет определен и предельный ход руки в целом, точнее, будет определена операционная область кистей 40L(R) рук.
В свете этих фактов, в результате продолжительных исследований и разработок было установлено, что, если задавать высоту плечевых суставов от поверхности пола, равной приблизительно «среднему значению Вср±1/2 стандартного отклонения σ высот расположения предметов», то возможно использование суставов, имеющих обычный диапазон движения (ход), и при удержании робота в вертикально выпрямленном положении возможно позиционирование кистей 40L(R) рук робота во всем диапазоне высот, в котором сосредоточены предметы, с которыми робот должен работать, и, тем самым, возможно увеличение эффективности работы робота без чрезмерного нагружения суставов.
Далее «среднее значение Вср±1/2 стандартного отклонения σ высот расположения предметов» лежит в пределах вышеупомянутого диапазона от 709,5 до 1014,5 мм, который можно сказать приблизительно составляет от 700 до 1000 мм. Если высота плечевых суставов станет равной от 700 до 1000 мм, то при имитации человеческого существа высота робота обычно станет равной примерно от 1000 до 1300 мм. Такая высота соответствует росту ребенка начальных классов школы, и поэтому, если высоту плечевых суставов задать в диапазоне от 700 до 1000 мм, то можно получить робота, который сможет эффективно действовать в условиях дома, иметь приятный внешний вид (и размер) и быть совестимым с обществом людей.
Как указывалось выше, руки 5 состоят из звеньев плечевой части 42L(R), звеньев локтя 44L(R) и нескольких суставов. Кроме того, при имитации человеческого существа отношение длины звена плеча 42L(R) к длине звена локтя 44L(R) составляет примерно 1 к 1. Поэтому, задавая длину звена плеча 42L(R) больше «1/2 стандартного отклонения σ», можно в результате сделать длину руки 5 больше «стандартного отклонения σ». Благодаря этому, обеспечивая высоту плечевых суставов в пределах вышеупомянутого «среднего значения Вср±1/2 стандартного отклонения σ высот расположения предметов», можно обеспечить кистям 40L(R) рук возможность надежно и плавно дотягиваться до группы предметов, с которыми должен работать робот, тем самым, увеличивая эффективность его работы с предметами.
По вышеуказанным причинам в роботе 1, соответствующем данному варианту осуществления изобретения, высота плечевых суставов от поверхности пола, как показано на фиг.5, установлена равной 910 мм. За счет этого эффективность действий робота в условиях дома оказывается высокой, может быть получен приятный внешний вид робота (высотой 1210 мм), и можно достичь его совместимости с обществом людей.
Далее, со ссылкой на фиг.7, будет приведено объяснение, касающееся конфигурации рук 5, а точнее, особых положений плечевых суставов.
Как уже говорилось выше, плечевые суставы являются суставами с тремя степенями свободы и включают в себя суставы 30R(L), 32R(L), 34R(L). Как отмечалось ранее, в таких суставах с несколькими степенями свободы имеют место особые положения, которые ограничивают движение. Варианты "особых положений" суставов подробно описаны в выложенной патентной заявке Японии 11(1999)-188668 и в эквивалентном ей патенте США №6333372, 25.12.2001, B 25 J 009/06, принадлежащих заявителю настоящего изобретения.
Как поясняется, в частности, в указанном патенте США, применительно к плечевым суставам особыми положениями являются такие положения, в которых ось плечевого сустава 30R(L) (см. фиг.3) при любой возможной ориентации этой оси находится на одной прямой с осью сустава 34R(L), связанного со звеном 42R(L) плечевой части руки и обеспечивающего поворот руки вокруг вертикальной оси. Когда плечевые суставы находятся в одном из таких особых положений, и плечевой сустав 30R(L), и плечевой сустав 34R(L) способны вращаться только вокруг единственной общей оси, т.е. количество степеней свободы плечевых суставов в этом особом положении ограничено. В связи с ограничениями движения, которые возникают, когда плечевые суставы находятся в указанном или ином особом положении, желательно не давать этим особым положениям попадать в диапазон высот группы предметов, с которыми должен работать робот.
По этой причине робот 1, соответствующий данному варианту осуществления изобретения, скомпонован так, что не допускается присутствие особых положений в пределах диапазона высот группы предметов, с которыми должен работать робот, т.е. в пределах «среднего значения Вср±1/2 стандартного отклонения σ высот расположения предметов». Точнее, конфигурация робота делается такой, чтобы особые положения возникали, когда кисти 40L(R) рук робота переводятся в более высокое положение (1035 мм), нежели «среднее значение Вср±1/2 стандартного отклонения σ высот расположения предметов» (1014,5 мм), что является максимальным значением высоты предметов. Если задавать особые положения таким способом, то можно сделать работу робота 1 с предметами еще эффективнее. Ввиду того, что способ выбора структуры особых положений, ранее предложенный заявителем, подробно описан в выложенной патентной заявке Японии 11(1999)-188668, в настоящей заявке такое описание опущено.
Далее, со ссылками на фиг.8, будет приведено описание, касающееся взаимного расположения плечевых шарниров и формирователей 52а видеосигнала, а также касающееся угла между формирователями 52а видеосигнала и кистями 40L(R) рук.
Фиг.8 представляет собой поясняющий чертеж, на котором показано взаимное расположение горизонтально вытянутой руки 5 (показана правая сторона (правая рука)) и оптического датчика 52, точнее, формирователей 52а видеосигнала (показан только один формирователь).
Перед тем, как описывать фиг.8, вначале следует привести простое пояснение, касающееся связи между углом наклона оптической оси оптического датчика 52 к изображаемому предмету, и быстротой распознавания изображения. Когда угол наклона оптической оси оптического датчика 52 по отношению к изображаемому предмету (угол между оптической осью оптического датчика 52 и горизонтальным направлением на уровне изображаемого предмета) становится большим (т.е. когда угол возвышения или угол понижения становится большим), скорость распознавания изображения снижается. Точнее, имеет место нормальное распределение с центром при угле, равном 0. Путем многочисленных экспериментов было установлено, что для практического применения диапазон допустимых углов составляет ±45 градусов (от угла возвышения 45 градусов до угла понижения 45 градусов). Поэтому обязательным условием является необходимость выдержать угол между оптической осью оптического датчика 52 и изображаемым предметом в пределах ±45 градусов.
Тогда при определении высоты крепления оптического датчика 52 следует проявлять аккуратность, чтобы выдержать угол между оптической осью и изображаемым предметом, т.е. предметом, с которым должен работать робот (на фиг.8 обозначен номером 100) в пределах ±45 градусов, как было установлено выше.
Однако, если в качестве точки отсчета принимается группа предметов, с которыми должен работать робот, то единственным образом определить этот угол нельзя. С другой стороны, кисти 40L(R) рук робота являются именно тем объектом, который фактически касается предметов и оперирует с ними, и поэтому, если принять в качестве «предмета» кисти 40L(R) рук, то высоту установки формирователей 52а видеосигнала можно определить такой, чтобы угол наклона оптических осей формирователей 52а видеосигнала по отношению к «предмету» попадал в диапазон ±45 градусов.
Если вернуться к описанию фиг.8, то видно, что руки 5 состоят из звеньев плеч 42L(R) длиной 180 мм, звеньев локтей 44L(R) длиной 185 мм и кистей 40L(R) длиной 140 мм и имеют общую длину 505 мм. Далее поверхности линз объективов формирователей 52а видеосигнала отнесены от вертикальной оси плечевых суставов в горизонтальном направлении приблизительно на 80 мм.
Следовательно, расстояние по горизонтали от формирователей 52а видеосигнала до предмета 100 составляет 425 мм. Расстояние по вертикали от плечевых суставов до формирователей видеосигнала (разность высот от поверхности пола) определяется на основе указанного расстояния по горизонтали таким образом, чтобы угол наклона оптических осей формирователей 52а видеосигнала по отношению к предмету 100 (кистям 40L(R) рук) находился в диапазоне±45 градусов. В данном варианте осуществления изобретения расстояние по вертикали сделано равным 175 мм, в силу чего угол наклона оптических осей формирователей 52а видеосигнала по отношению к кистям 40L(R) рук, когда кисти 40L(R) и руки расположены горизонтально, а более конкретно угол возвышения составляет 22,4 градуса.
Поскольку угол возвышения равен 22,4 градуса, естественно, что предметы, расположенные выше (до угла возвышения 45 градусов), могут быть точно распознаны, так же как и предметы, находящиеся ниже (до угла понижения 45 градусов). Расстояние по горизонтали от формирователей 52а видеосигнала до кистей 40L(R) рук, как уже говорилось, составляет 425 мм, таким образом, теоретически должна быть возможность точного распознавания предметов, высота расположения которых отличается от высоты плечевых суставов на величину от +600 (=425+175) до -250 (=-(425-175)) мм.
В реальных условиях из-за того, что при движении рук 5 вверх и вниз их кисти 40L(R) соответственно приближаются к туловищу, расстояние по горизонтали от формирователей 52а видеосигнала до кистей 40L(R) сокращается, что затрудняет точное распознавание предметов в пределах упомянутого диапазона, но, во всяком случае, в диапазоне «среднего значения Вср±1/2 стандартного отклонения σ высот расположения предметов» их точное распознавание возможно. Как результат появляется возможность постоянного, устойчивого распознавания изображений и, тем самым, более эффективной работы робота с предметами.
Далее было установлено, что для того, чтобы точно распознать группу предметов в пределах вышеупомянутого «среднего значения Вср±1/2 стандартного отклонения σ высот расположения предметов», достаточно задать угол наклона оптических осей формирователей 52а видеосигнала по отношению к упомянутым кистям 40L(R) рук в диапазоне от +5 до +45 градусов (угол возвышения от 5 до 45 градусов). Следует обратить внимание, что углы, меньшие +5 градусов, не рассматриваются, ибо формирователи 52а видеосигнала установлены в голове 4, т.е. выше плечевых суставов. В роботе 1, соответствующем данному варианту осуществления изобретения, упомянутый угол может быть реализован, если разность высоты плечевых суставов и высоты формирователей 52а видеосигнала над 5 поверхностью пола задать в диапазоне приблизительно от 150 до 250 мм.
Как уже говорилось выше, если в роботе 1, соответствующем данному варианту осуществления изобретения, высоту плечевых суставов задать в соответствии с высотами расположения группы предметов, с которыми он должен работать, а точнее, если задать высоту плечевых суставов в диапазоне от 700 до 1000 мм, то можно получить робот, который сможет эффективно действовать в условиях дома, иметь приятный внешний вид (и размер) и быть совестимым с обществом людей.
Более того, эффективность работы робота с группой предметов может быть дополнительно увеличена благодаря конфигурации робота, которая не допускает присутствия особых положений внутри диапазона высот этой группы предметов, т.е. в пределах «среднего значения Вср±1/2 стандартного отклонения σ высот расположения предметов».
Кроме того, благодаря тому, что угол наклона оптических осей формирователей 52а видеосигнала по отношению к кистям 40L(R) рук устанавливается в диапазоне от +5 до +45 градусов, появляется возможность постоянного, устойчивого распознавания изображений, что дополнительно увеличивает эффективность работы робота с группой предметов.
Как указывалось выше, в данном варианте осуществления изобретения предлагается двуногий робот 1, имеющий, по меньшей мере, туловище 3, две ноги 2, каждая из которых шарнирно соединена с туловищем посредством тазобедренного сустава 10, 12, 14R(L), две руки 5, каждая из которых шарнирно соединена с туловищем посредством плечевого сустава 30, 32, 34R(L), так что робот, шагая, перемещается по поверхности пола в операционном пространстве за счет поворота ног и совершает действия над предметами в операционном пространстве за счет приведения в движения, по меньшей мере, рук; робот отличается тем, что, если он находится в вертикально выпрямленной позе, то высоту от поверхности пола, которой касаются концы ног (нижние части стоп 22R, L) робота, до плечевых суставов устанавливают так, чтобы она попадала в диапазон значений (Вср±1/2σ), заданный на основе средней величины, полученной путем усреднения высот расположения предметов над поверхностью пола и стандартного отклонения σ этой средней величины.
Благодаря тому, что двуногий робот скомпонован так, что высота от поверхности пола, которой касаются концы ног, до плечевых суставов, когда робот находится в вертикально выпрямленной позе, попадает в диапазон значений, заданный на основе средней величины, полученной путем усреднения высот расположения предметов (с которыми работает робот) над поверхностью пола и стандартного отклонения σ этой средней величины, высота установки плечевых суставов от поверхности пола может быть определена оптимальным образом, в соответствии с высотами положения предметов, в силу чего эффективность работы робота в имеющемся операционном пространстве может быть увеличена.
Говоря точнее, предельный размах (высота подъема) рук, соединенных через плечевые суставы, может быть установлен оптимальным образом посредством оптимизации высоты плечевых суставов, соответственно высотам расположения группы предметов, над которыми должны совершаться действия, и тем самым может быть увеличена эффективность работы робота с этими предметами.
Затем двуногий робот компонуют так, что вышеупомянутый диапазон составляет от 700 до 1000 мм.
Благодаря тому, что двуногий робот скомпонован так, что высота плечевых суставов лежит в диапазоне от 700 до 1000 мм, эффективность действий робота по отношению к группе предметов, с которыми роботу надлежит работать в условиях дома, т.е. предметов, расположенных на высотах, удобных для пользования всеми, от взрослого до ребенка, пользователями инвалидных колясок и т.п., такая эффективность может быть значительно увеличена. Далее определение высоты плечевых суставов от поверхности пола до некоторой степени косвенно определяет и общий размер робота, включая его высоту. Задание высоты плечевых суставов вышеупомянутым образом в диапазоне от 700 мм до 1000 мм также помогает получить двуногий робот привлекательного внешнего вида, ибо высота робота, если ему надлежит имитировать человеческое существо, должна составлять приблизительно от 1000 до 1300 мм.
Кроме того, конфигурацию двуногого робота делают такой, что каждая рука 5 состоит, по меньшей мере, из плеча 42R(L), шарнирно соединенного с туловищем 3 через плечевой сустав, и локтя 44R(L), шарнирно соединенного с плечом через локтевой сустав 36R(L), при этом длину плеча каждой руки определяют на основе стандартного отклонения σ.
Таким образом, конфигурацию двуногого робота делают такой, что каждая рука состоит, по меньшей мере, из плеча, шарнирно соединенного с туловищем через плечевой сустав, и локтя, шарнирно соединенного с плечом через локтевой сустав, при этом длину плеча каждой руки определяют на основе стандартного отклонения σ высот группы предметов, и поэтому длина плеча каждой руки может быть определена оптимальным образом в соответствии с высотами расположения предметов, чтобы работу робота с этими предметами сделать еще эффективнее.
Говоря точнее, эффективность работы робота с предметами можно дополнительно увеличить, если установить такую длину плеча каждой руки, какая позволит увеличить степень свободы плеча в том интервале высот, в котором велика плотность распределения высот расположения предметов.
Кроме того, предлагается двуногий робот 1, имеющий, по меньшей мере, одно туловище 3, две ноги 2, каждая из которых шарнирно соединена с туловищем через тазобедренный сустав 10, 12, 14R(L), и две руки 5, каждая из которых шарнирно соединена с туловищем через плечевой сустав 30, 32, 34R(L) и на своем наружном конце оснащена кистью 40R(L), так что робот за счет поворота ног шагает по поверхности пола в операционном пространстве и совершает в операционном пространстве действия над предметами путем приведения в движение, по меньшей мере, рук; робот, отличающийся тем, что, если он находится в вертикально выпрямленной позе, а его плечевые суставы принимают особое положение, то высоту от поверхности пола, которой касаются концы ног (нижние части стоп 22R, L) робота, до кистей его рук устанавливают так, чтобы она не попадала в диапазон значений (Вср±1/2σ), заданный на основе средней величины Вср, полученной путем усреднения высот расположения предметов над поверхностью пола и стандартного отклонения σ этой средней величины.
Таким образом, конфигурацию двуногого робота делают такой, чтобы высота от поверхности пола, которой касаются концы ног робота, до кистей его рук, когда робот находится в вертикально выпрямленной позе, а плечевые суставы принимают особое положение, не попадала в диапазон значений, заданный на основе средней величины, полученной путем усреднения высот расположения предметов над поверхностью пола и стандартного отклонения σ этой средней величины, а точнее, конфигурацию робота делают такой, чтобы ни одно из особых положений плечевых суставов не попадало в область, в которой плотность распределения высот расположения предметов, с которыми должен работать робот, велика, и поэтому в указанной области может быть увеличена степень свободы рук, и тем самым может быть дополнительно увеличена эффективность работы робота с предметами.
Кроме того, предлагается двуногий робот 1, имеющий, по меньшей мере, туловище 3, две ноги 2, каждая из которых шарнирно соединена с туловищем через тазобедренный сустав 10, 12, 14R(L), две руки 5, каждая из которых шарнирно соединена с туловищем через плечевой сустав 30, 32, 34R(L), и на своем наружном конце оборудована кистью 40R(L), и голову 4, шарнирно соединенную с туловищем через шейный сустав 46, и оснащенную оптическим датчиком 52, состоящим из формирователя видеосигнала 52а, так что робот за счет поворота ног, шагая, передвигается по поверхности пола в операционном пространстве, и совершает в этом операционном пространстве действия над предметами путем приведения в движение рук, основываясь, по меньшей мере, на информации об операционном пространстве, полученной из изображения, снятого формирователем видеосигнала; робот, отличающийся тем, что формирователь видеосигнала устанавливается таким образом, что оптические оси, соединяющие кисти рук с формирователем видеосигнала, образуют с горизонтальным направлением углы в диапазоне от 5 до 45 градусов, если руки расположены горизонтально, параллельно поверхности пола, а робот находится в вертикально выпрямленном положении.
Таким образом, конфигурацию робота делают такой, что формирователи видеосигнала устанавливаются таким образом, что, когда двуногий робот находится в вертикально выпрямленной позе, оптические оси, соединяющие кисти рук с формирователями видеосигнала, когда руки робота расположены горизонтально, параллельно поверхности пола, образуют с горизонтальным направлением углы в диапазоне от 5 до 45 градусов, т.е. точно определяя, что углы, под которыми формирователь видеосигнала видит предметы, это углы, лежащие в диапазоне от 5 до 45 градусов, можно осуществлять постоянное, устойчивое распознавание изображения и, тем самым, дополнительно увеличить эффективность работы робота с предметами.
Кроме того, двуногий робот компонуют таким образом, что высота от поверхности пола, которой касаются нижние концы ног 2, до плечевых суставов лежит в диапазоне от 700 мм до 1000 мм, а формирователь 52а видеосигнала устанавливают так, что разность между высотой плечевых суставов и высотой формирователей изображения от поверхности пола лежит в диапазоне от 150 до 250 мм, когда двуногий робот 1 находится в вертикально выпрямленной позе.
Таким образом, благодаря тому, что двуногий робот скомпонован так, что высота от поверхности пола, которой касаются нижние концы ног, до плечевых суставов лежит в диапазоне от 700 до 1000 мм, а формирователи видеосигнала установлены так, что разность между высотой плечевых суставов и высотой формирователей изображения от поверхности пола лежит в диапазоне от 150 до 250 мм, когда робот находится в вертикально выпрямленной позе, эффективность работы робота с предметами в условиях дома, т.е. предметами, установленными на высотах, облегчающих их использование всеми, от взрослых до детей, пользователями инвалидных колясок и т.п., может быть значительно увеличена. Кроме того, определение вышеупомянутым образом разности высоты плечевых суставов и высоты формирователей видеосигнала над поверхностью пола позволяет осуществлять постоянное, устойчивое распознавание изображения, тем самым дополнительно увеличивая эффективность работы робота с предметами. Вдобавок, высота робота оказывается равной приблизительно от 1000 до 1300 мм, что помогает создать двуногий робот, имеющий привлекательный внешний вид.
Промышленная применимость
Согласно настоящему изобретению путем определения надлежащей высоты плечевых суставов двуногого робота в соответствии с высотой расположения группы предметов (с которыми должен работать робот) над уровнем пола, а точнее, задавая высоту плечевых суставов от 700 до 1000 мм, можно получить робота, который обеспечивает высокую эффективность действий в домашних условиях, имеет привлекательный внешний вид (размер) и совместим с обществом людей. Кроме того, благодаря такой конфигурации робота, которая не допускает, чтобы его особые положения попадали в область расположения предметов по высоте, т.е. в область «среднего значения Вср±1/2 стандартного отклонения σ высот расположения предметов», можно дополнительно увеличить эффективность работы робота с предметами. И еще благодаря тому, что угол наклона оптической оси формирователя видеосигнала по отношению к кистям рук робота задается в диапазоне от +5 до +45 градусов, возможно осуществление постоянно устойчивого распознавания изображений, в силу чего работа робота с предметами может быть сделана еще эффективнее.





Изобретение относится к двуногому роботу, определению размера двуногого робота, а именно высоты установки плечевых суставов от поверхности пола в соответствии с высотой группы предметов, над которыми совершают действия. Двуногий робот имеет туловище, две ноги, две руки с кистями и голову. Робот перемещается по поверхности пола в операционном пространстве и совершает в операционном пространстве действия над предметами за счет приведения в движение, по меньшей мере, рук. Высоту от поверхности пола, которой касаются концы ног робота, до плечевых суставов, когда робот находится в вертикально выпрямленной позе, устанавливают такой величины, чтобы она попадала в диапазон значений приблизительно от 700 до 1000 мм, заданный на основе средней величины, полученной путем усреднения высот расположения предметов над поверхностью пола и стандартного отклонения σ этой средней величины. Изобретение позволит повысить эффективность работы робота в имеющемся операционном пространстве. 3 н. и 3 з.п. ф-лы, 8 ил.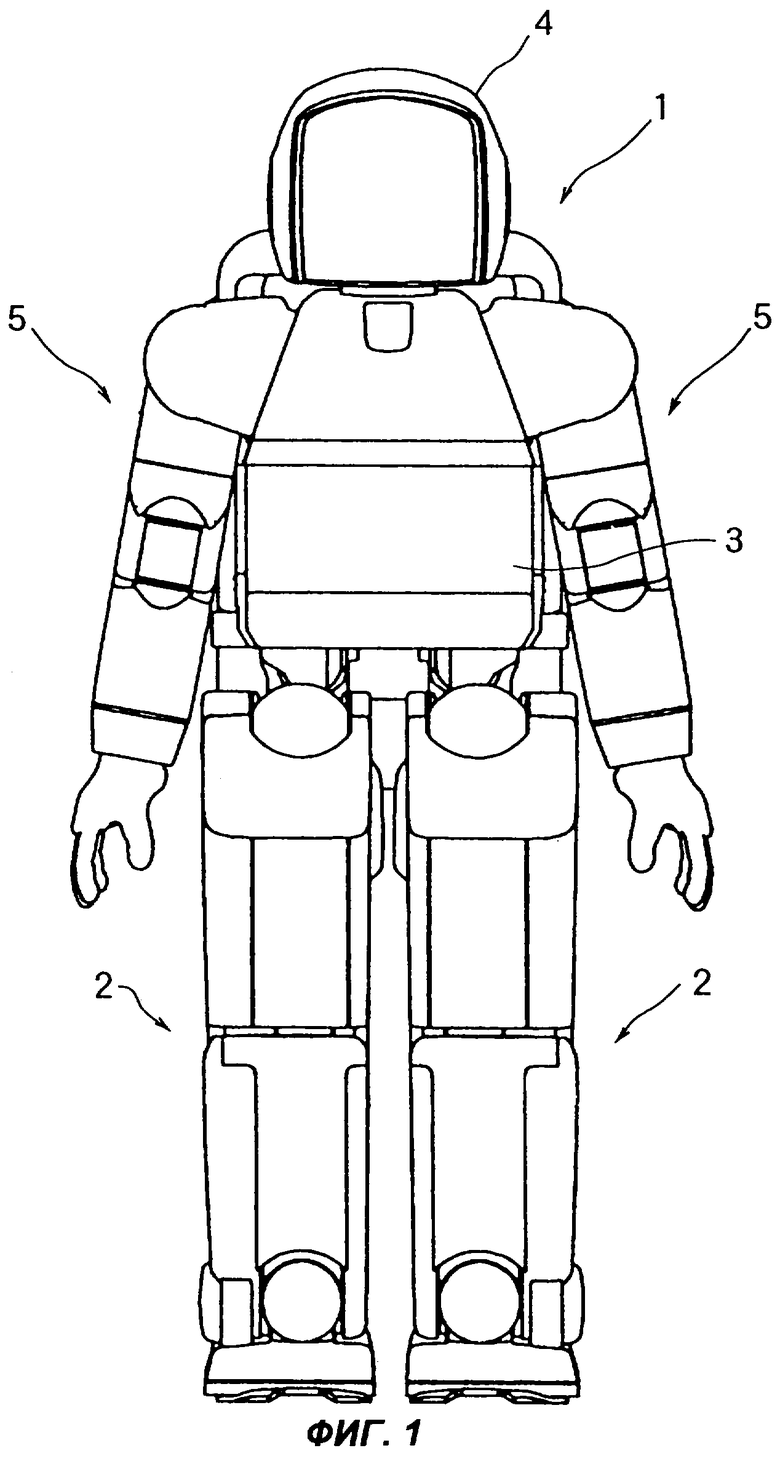
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| US 6064167 А, 16.05.2000 | |||
| МОБИЛЬНЫЙ ШАГАЮЩИЙ РОБОТ | 1992 |
|
RU2057046C1 |

