ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к общей области турбинных двигателей.
В частности, оно относится к мониторингу авиационных турбинных двигателей, оборудованных одним или более вращающимися валами, например, такими как турбореактивный двигатель или турбовинтовой двигатель.
Известным образом, вращающийся вал турбореактивного двигателя, например, ротор низкого давления, подвергается постоянному скручивающему усилию.
Кроме того, конкретные воздействия могут динамически формировать колебания во вращающемся валу на определенной частоте, известной как частота крутильных колебаний вала. Эта определенная частота характеризует первую крутильную моду вала. В порядке примера, для ротора низкого давления турбореактивного двигателя, эта частота низка по сравнению с частотой вращения ротора.
Таким образом, возможно, что импульсный впрыск топлива в турбореактивный двигатель входит в резонанс с этой первой крутильной модой вала турбореактивного двигателя. В зависимости от амплитуды этого резонанса, может формироваться шум в кабине или может существовать риск разрушения вала в результате усталости при вибрации.
Поэтому требуется мониторинг крутильных колебаний вращающегося вала турбореактивного двигателя во избежание таких недостатков.
ЗАДАЧА И СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель изобретения, таким образом, состоит в том, чтобы предложить надежный способ мониторинга крутильных колебаний вращающегося вала турбинного двигателя посредством использования сигналов, полученных от датчиков, которые уже присутствуют в турбинном двигателе.
Эта цель достигается посредством способа мониторинга крутильных колебаний вращающегося вала турбинного двигателя, причем способ содержит:
- этап получения колебательного сигнала ускорения от датчика, расположенного на неподвижной детали турбинного двигателя, причем этот колебательный сигнал характеризуется несущей частотой;
- этап оценивания частотного спектра колебательного сигнала;
- этап поиска пары спектральных линий с амплитудами, превышающими, по меньшей мере, первый порог, причем линии распределены в спектре с обеих сторон от несущей частоты колебательного сигнала, и отстоят от нее на частоту крутильных колебаний вала; и
- при необходимости, этап выдачи предупреждающего сообщения.
Соответственно, изобретение также предоставляет устройство мониторинга для мониторинга крутильных колебаний вращающегося вала турбинного двигателя, причем устройство содержит:
- средство получения для получения колебательного сигнала ускорения от датчика, расположенного на неподвижной детали турбинного двигателя, причем колебательный сигнал характеризуется несущей частотой;
- средство оценивания для оценивания частотного спектра колебательного сигнала;
- средство поиска для поиска пары спектральных линий с амплитудами, превышающими, по меньшей мере, первый порог, причем линии распределены в спектре с обеих сторон от несущей частоты колебательного сигнала, и отстоят от нее на величину частоты крутильных колебаний вала; и
- средство выдачи для выдачи предупреждающего сообщения, активируемое при необходимости.
Предпочтительно, но без ограничения, изобретение применимо, в частности, для мониторинга низкочастотных крутильных колебаний вращающегося вала турбинного двигателя. Термин "низкочастотный" употребляется здесь для обозначения частоты, которая значительно ниже частоты вращения вращающегося вала, находящегося под мониторингом, например частота крутильных колебаний равна 30% частоты вращения вала.
Преимущественно, изобретение позволяет использовать сигналы, получаемые от датчиков, которые уже присутствуют в турбинном двигателе, т.е. вибродатчиков, таких как, акселерометры, тензодатчики, микрофоны и т.д., для мониторинга крутильных колебаний, которым подвергаются вращающиеся валы турбинного двигателя. Соответствующая обработка этих сигналов позволяет выдавать предупреждающее сообщение в случае избыточной амплитуды колебаний и, при необходимости, предлагать внеплановое техническое обслуживание для ограничения шума в кабине, или даже для предотвращения поломки вращающегося вала.
Авторы изобретения обратили внимание, проницательно, что в присутствие дисбаланса на вращающемся валу, считывание и анализ колебательных сигналов ускорения, полученных от датчиков, расположенных на неподвижной детали турбинного двигателя, позволяет простым и надежным образом выявлять наличие крутильных колебаний с предварительно определенными уровнями амплитуды. На практике, хотя много усилий отдается для устранения дисбаланса, повреждающего вал ротора, дисбаланс никогда не удается полностью устранить. Другими словами, вращающиеся валы никогда не бывают полностью сбалансированы, поэтому всегда можно осуществлять их мониторинг посредством изобретения.
Способ мониторинга согласно изобретению представляет преимущество возможности реализации в реальном времени или после всего лишь короткой задержки, например, в устройстве мониторинга на борту летательного аппарата, снабженного турбинным двигателем. Устройство мониторинга может, в частности, быть включено в состав турбинного двигателя, а более точно, в устройство для мониторинга турбинного двигателя, общеизвестного как блок мониторинга двигателя (EMU).
В варианте воплощения, устройство мониторинга может располагаться на стенде вспомогательного оборудования и под крылом летательного аппарата совместно с оборудованием, специально предназначенным для мониторинга турбинного двигателя.
В еще одном варианте воплощения, способ мониторинга можно реализовать в наземном устройстве, предназначенном для мониторинга турбинного двигателя.
Следует заметить, что способ изобретения можно легко комбинировать с другими способами обнаружения для повышения надежности обнаружения и, таким образом, улучшения диагностики при обслуживании, доставляемой конечному пользователю турбинного двигателя.
В турбинном двигателе основным источником дисбаланса является крыльчатка. Тем не менее, сама турбина двигателя обычно также вносит дисбаланс. В таких обстоятельствах имеет место комбинация дисбалансов, которые осциллируют в противофазе.
В конкретной реализации, изобретение преимущественно опирается на это наблюдение, для установления связи уровня достоверности с предупреждающим сообщением. С этой целью, способ мониторинга также содержит:
- этап оценивания сигнала огибающей колебательного сигнала;
- этап оценивания частотного спектра сигнала огибающей;
- этап поиска, на котором осуществляют поиск, по меньшей мере, одной спектральной линии в спектре сигнала огибающей, амплитуда которого превышает второй порог, и который существует на величине, кратной частоте крутильных колебаний вала; и
- этап оценивания уровня достоверности, связанного с предупреждающим сообщением, как функции результата этапа поиска.
В соответствии с этой реализацией, устройство мониторинга также может содержать:
- средство оценивания для оценивания сигнала огибающей колебательного сигнала;
- средство оценивания для оценивания частотного спектра сигнала огибающей;
- средство поиска для поиска, по меньшей мере, одной спектральной линии в спектре сигнала огибающей, амплитуда которого превышает второй порог, и который существует на величине, кратной частоте крутильных колебаний вала; и
- средство оценивания для оценивания уровня достоверности, связанного с предупреждающим сообщением, как функции результата поиска.
Сигнал огибающей можно получить, например, из сигнала, который является результатом применения преобразования Гильберта к колебательному сигналу.
Таким образом, предпочтительно, в этой конкретной реализации, предупреждающему сообщению присваивается более высокий уровень достоверности, когда линия с амплитудой, превышающей второй порог, выявляется в спектре сигнала огибающей на частоте, кратной частоте крутильных колебаний вала. Таким образом, обнаружение таких линий служит подтверждением выданного предупреждения в отношении крутильных колебаний вращающегося вала.
Тем не менее, можно видеть, что отсутствие каких-либо линий в спектре сигнала огибающей не отменяет предупреждение, выданное вследствие превышения первого порога спектральными линиями в спектре колебательного сигнала.
В конкретной реализации, способ мониторинга также содержит:
- этап поиска, на котором осуществляют поиск, по меньшей мере, еще одной пары спектральных линий, распределенных в спектре колебательного сигнала с обеих сторон от несущей частоты и отстоящих от нее на величину, кратную частоте крутильных колебаний вала; и
- этап оценивания уровня опасности, связанного с предупреждающим сообщением, причем этот уровень опасности зависит от количества пар линий, найденных на этапе поиска, амплитуды которых превышают, по меньшей мере, третий порог.
В соответствии с этой реализацией, устройство мониторинга также содержит:
- средство поиска для поиска, по меньшей мере, еще одной пары спектральных линий, распределенных в спектре колебательного сигнала с обеих сторон от несущей частоты и отстоящих от нее на величину, кратную частоте крутильных колебаний вала; и
- средство оценивания для оценивания уровня опасности, связанного с предупреждающим сообщением, причем уровень опасности зависит от количества пар, найденных средством поиска, амплитуды которых превышают, по меньшей мере, третий порог.
В другом аспекте изобретения, изобретение также предоставляет турбинный двигатель, включающий в себя:
- устройство мониторинга в соответствии с изобретением; и
- акселерометр, расположенный на неподвижной детали турбинного двигателя и выполненный с возможностью доставки колебательного сигнала ускорения на устройство мониторинга.
В порядке примера, такой турбинный двигатель представляет собой турбореактивный двигатель.
В конкретной реализации, различные этапы способа мониторинга определяются инструкциями компьютерной программы.
Следовательно, изобретение также предоставляет компьютерную программу на носителе данных, причем программа подходит для реализации в устройстве мониторинга или, в более общем случае, на компьютере, причем программа включает в себя инструкции, выполненные с возможностью реализации вышеописанных этапов способа мониторинга.
Программа может быть составлена с использованием любого языка программирования, и может иметь вид исходного кода, объектного кода или кода промежуточного между исходным кодом и объектным кодом, например, в частично компилированной форме или в любой другой требуемой форме.
Изобретение предоставляет машиночитаемый носитель данных, включающий в себя, как упомянуто выше, инструкции компьютерной программы.
Носителем данных может быть любой элемент или устройство, способное хранить программы. Например, носитель может содержать средство хранения, такое как, постоянная память (ROM), например, ROM на основе компакт-диска (CD) или ROM на основе микроэлектронной схемы, или даже средство магнитной записи, например, дискета или жесткий диск.
Кроме того, носитель данных может представлять собой распространяющийся носитель, например, электрический или оптический сигнал, пригодный для переноса по электрическому или оптическому кабелю, посредством радиоволн или другими средствами. Программу согласно изобретению, в частности, можно загружать из сети типа Интернет.
Альтернативно, носитель данных может представлять интегральную схему, в которую встроена программа, причем схема выполнена с возможностью выполнения или использования при выполнении данного способа.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие характеристики и преимущества настоящего изобретения явствуют из нижеследующего описания, приведенного со ссылкой на прилагаемые чертежи, демонстрирующие вариант осуществления, не носящий ограничительного характера. В чертежах:
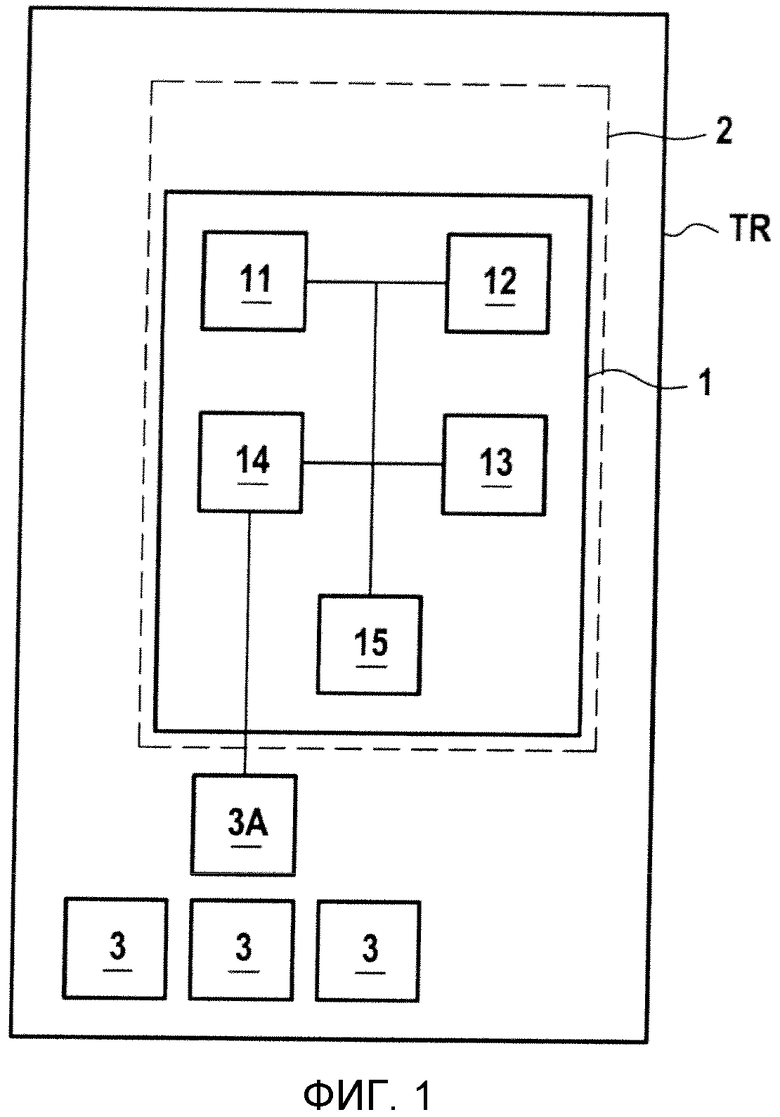
- фиг. 1 - схема устройства мониторинга в соответствии с изобретением, в конкретном варианте осуществления;
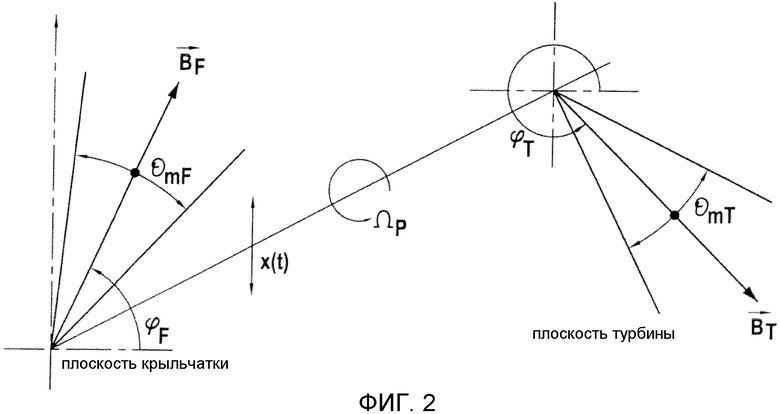
- фиг. 2 - схема предложенной согласно изобретению модели дисбаланса в плоскости крыльчатки, связанного с дисбалансом в плоскости турбины и воздействующего на вращающийся вал турбореактивного двигателя;
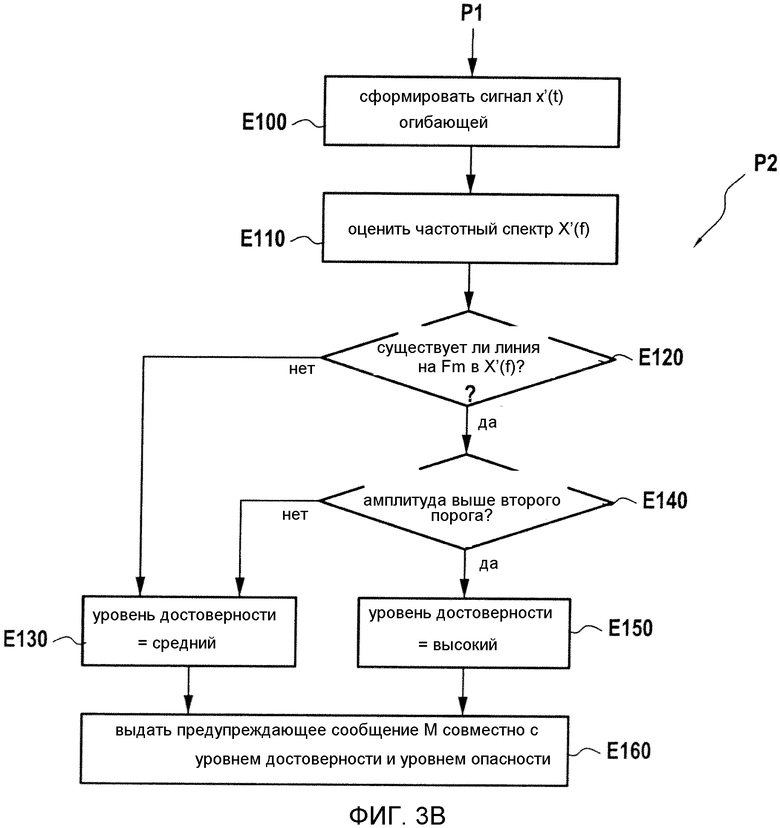
- фиг. 3A и 3B - блок-схемы, показывающие основные этапы способа мониторинга в соответствии с изобретением при реализации устройством мониторинга, показанным на фиг. 1, в конкретной реализации;
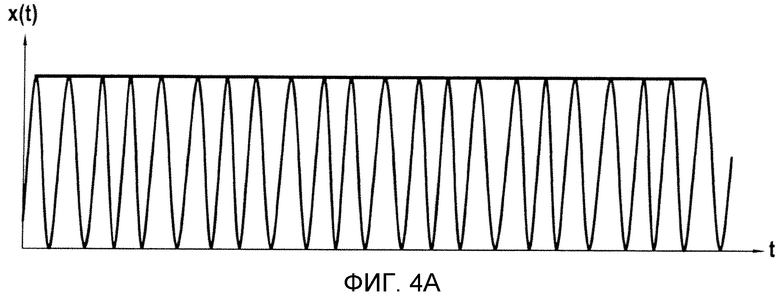
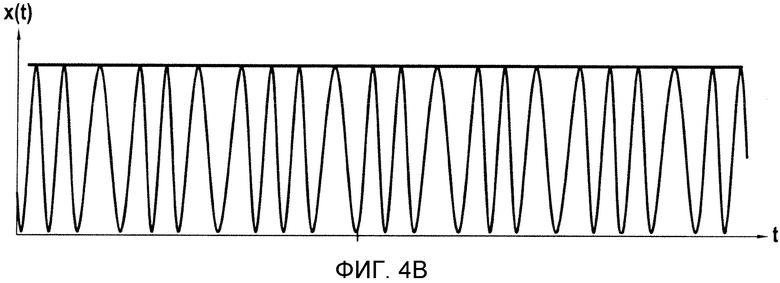
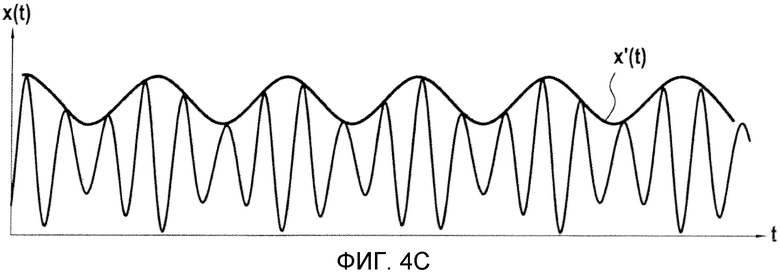
- фиг. 4A-4C показывают примеры колебательных сигналов x(t);
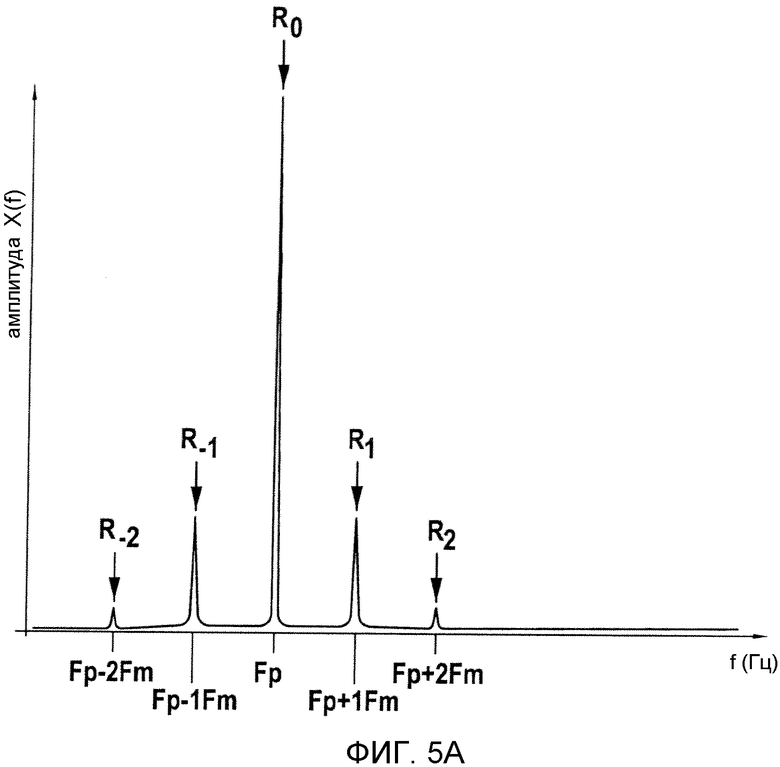
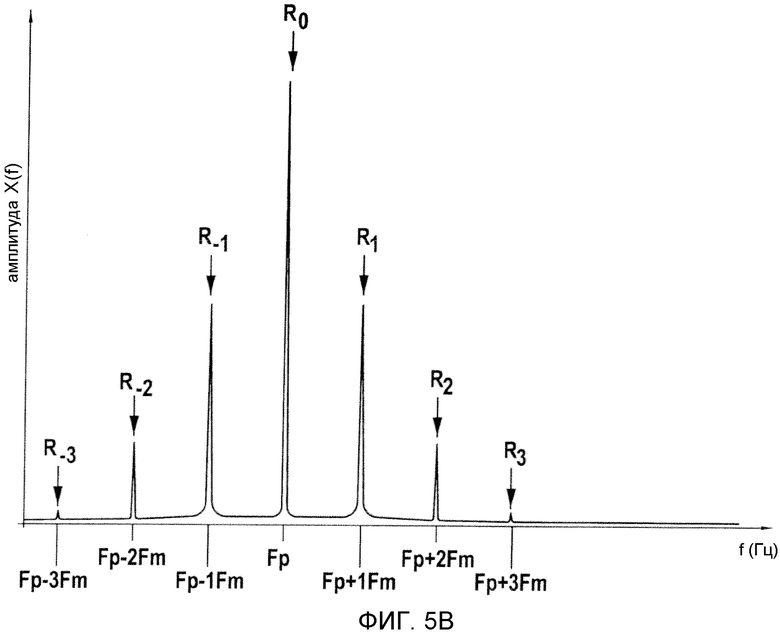
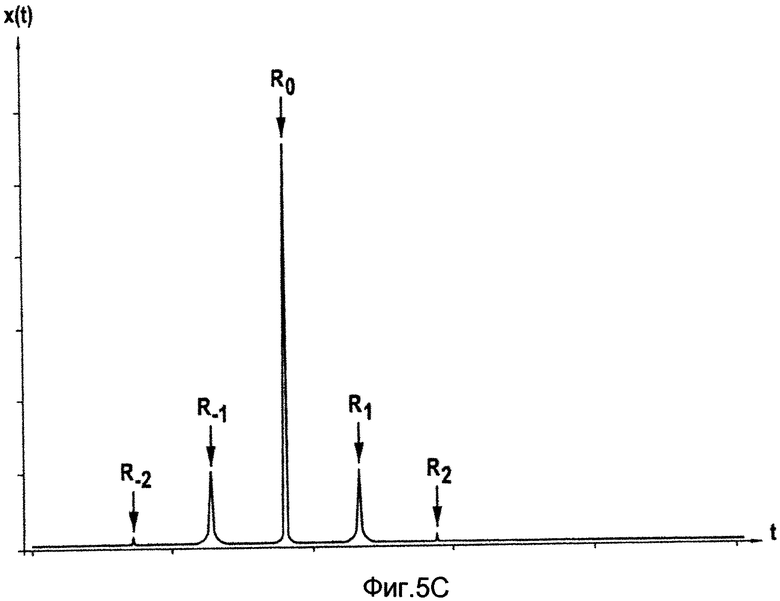
- фиг. 5A-5C показывают частотные спектры колебательных сигналов, показанных на фиг. 4A-4C, соответственно; и
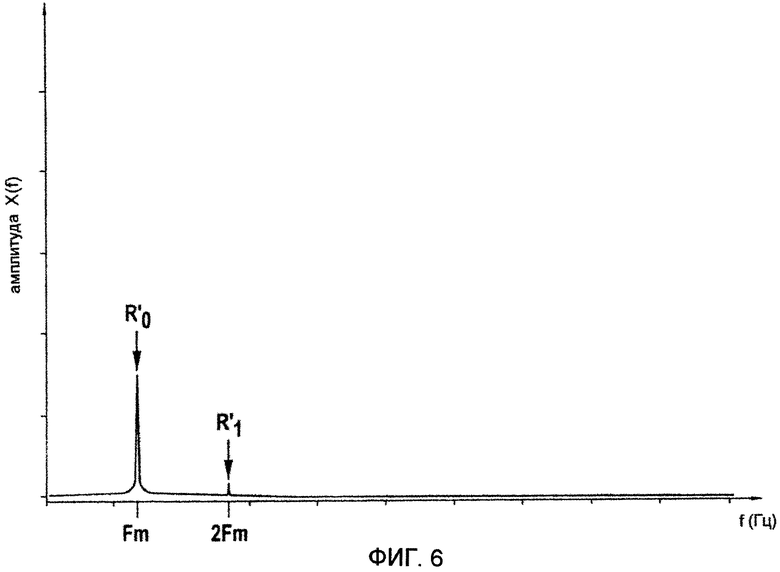
- фиг. 6 показывает спектр огибающей колебательного сигнала, показанного на фиг. 4C.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
Изобретение относится к мониторингу турбинного двигателя, а более конкретно к мониторингу крутильных колебаний, которым подвергается вращающийся вал турбинного двигателя в процессе работы.
Принцип, на котором преимущественно базируется изобретение, состоит в том, что крутильные колебания вращающегося вала турбинного двигателя имеют место вокруг его рабочей скорости, и в присутствие связанного с ним дисбаланса на роторе, формируют частотную и, возможно, также амплитудную модуляцию колебательных сигналов, доставляемых вибродатчиками, расположенными на неподвижных деталях турбинного двигателя. Таким образом, изобретение использует тот факт, что, наблюдая и анализируя эти колебательные сигналы, можно выявлять крутильные колебания избыточной амплитуды.
Как упомянуто выше, на практике, невозможно полностью сбалансировать вращающиеся валы турбинного двигателя, поэтому таким валам всегда присущ некоторый дисбаланс. Поэтому, собственно говоря, не существует никаких препятствий для реализации изобретения.
В турбинном двигателе, основным источником дисбаланса является крыльчатка. Тем не менее, нередко турбина также дает свой вклад в дисбаланс, осциллируя в противофазе с дисбалансом, который существует в плоскости крыльчатки. Изобретение преимущественно применимо в обоих этих обстоятельствах.
Ниже делается ссылка на фиг. 1, которая показывает конкретный вариант осуществления устройства 1 мониторинга в соответствии с изобретением, в его окружении.
В этом конкретном варианте осуществления, вращающийся вал ABP низкого давления (фиг. 2) турбореактивного двигателя TR, установленного на летательном аппарате (не показан) подлежит мониторингу в соответствии с изобретением. Тем не менее, эти предположения не служат ограничением, и изобретение также применяется к другим турбинным двигателям, например, к турбовинтовому двигателю.
В описанном здесь варианте осуществления, устройство 1 мониторинга находится на борту летательного аппарата и встроено в устройство мониторинга или EMU 2 летательного аппарата.
Альтернативно, устройство мониторинга согласно изобретению может располагаться на стенде вспомогательного оборудования и под крылом летательного аппарата совместно с оборудованием, специально предназначенным для мониторинга турбореактивного двигателя TR, или может быть реализовано в наземном устройстве, предназначенном для мониторинга турбореактивного двигателя.
Известным образом, турбореактивный двигатель TR предоставляется с множеством рабочих датчиков 3, например датчиками для считывания: позиции, скорости, температуры, давления, вибрации и т.д. Эти датчики пригодны для доставки различных измерений на EMU 2, чтобы он мог осуществлять мониторинг работы турбореактивного двигателя TR.
Среди этих датчиков, в частности, есть акселерометр 3A, размещенный на неподвижной детали турбореактивного двигателя TR (например, на одном из подшипников вращающегося вала ABP). Такой датчик обычно используется в турбореактивных двигателях или, в более общем случае, в турбинных двигателях, и он не описан здесь более подробно.
Традиционно, акселерометр 3A выполнен с возможностью предоставлять электрический сигнал или колебательный сигнал ускорения в момент времени t, и этот сигнал обозначается x(t) и представляет величину пропорциональную измеренному ускорению. В этом примере, этот электрический сигнал является результатом ускорений, сообщаемых неподвижной детали, на которой располагается акселерометр 3A, как результат дисбаланса, присутствующего на вращающемся валу низкого давления турбореактивного двигателя TR в процессе работы. Сигнал поступает на EMU 2 и, в частности, на устройство 1 мониторинга.
Альтернативно, следует отметить, что для доставки на EMU 2 колебательного сигнала, пропорционального ускорению, можно использовать другие вибродатчики, такие как, например, микрофон или тензодатчик. В смысле, подразумеваемом в изобретении, считается, что такой сигнал составляет колебательный сигнал ускорения.
В этом примере, устройство 1 мониторинга представляет аппаратную архитектуру компьютера.
Оно содержит, в частности, процессор 11, оперативную память (RAM) 12, ROM 13 и средство 14 для связи с оборудованием на борту летательного аппарата, таким как, например, акселерометр 3A. Известным образом, такое оборудование и устройство 1 мониторинга, отвечающее изобретению осуществляют связь через шины или линии цифровых данных летательного аппарата и известны специалисту в данной области техники.
Устройство 1 мониторинга также включает в себя средство 15 для связи с сервером оператора летательного аппарата (не показан), например, посредством адресно-отчетной системы авиационной связи (ACARS).
ROM 13 включает в себя компьютерную программу в соответствии с изобретением, которая выполнена с возможностью выполнения основных этапов способа мониторинга, отвечающего изобретению, описанного ниже со ссылкой на фиг. 2-6.
Здесь предполагается, что вращающийся вал низкого давления ABP, подвергаемый мониторингу, представляет дисбаланс в плоскости крыльчатки в сочетании с дисбалансом в плоскости турбины турбореактивного двигателя TR. В результате влияния кручения вала, эти два дисбаланса осциллируют в противофазе.
Фиг. 2 показывает модель в векторной форме этих дисбалансов, которые обозначены соответственно  и
и  , в плоскости крыльчатки и в плоскости турбины.
, в плоскости крыльчатки и в плоскости турбины.
При этой модели, колебательный сигнал x(t), доставляемый акселерометром 3A в момент времени t может быть записан в следующей форме:

где:
- Ωp обозначает угловую несущую частоту, несущую колебательный сигнал x(t), и представляет скорость вращения вала. Следует понимать, что:
где Fp обозначает несущую частоту, несущую колебательный сигнал;
- Ωm обозначает угловую частоту кручения вращающегося вала. Следует понимать, что:
где Fm обозначает частоту крутильных колебаний вращающегося вала. Эта частота крутильных колебаний известна и зависит от характеристик вращающегося вала;
- θmF и θmT обозначают амплитуды крутильных колебаний, соответственно, в плоскости крыльчатки и в плоскости турбины;
- F и T представляют пиковые амплитуды колебательного сигнала x(t), доставляемого акселерометром. Амплитуда F является функцией вектора дисбаланса в плоскости крыльчатки и отклика конструкции на дисбаланс. Амплитуда T является функцией вектора дисбаланса в плоскости турбины и отклика конструкции на дисбаланс;
- φF обозначает фазовую позицию, соответствующую угловой позиции вектора дисбаланса в плоскости крыльчатки относительно опорного угла; и
- φT обозначает фазовую позицию, соответствующую угловой позиции вектора дисбаланса в плоскости турбины относительно упомянутого опорного угла.
Со ссылкой на фиг. 3A и 3B, ниже приведено подробное описание основных этапов способа мониторинга согласно изобретению в конкретной реализации.
В описанной реализации, способ мониторинга содержит две стадии:
- первую стадию P1 (показанную на фиг. 3A), в течение которой обнаруживается присутствие крутильных колебаний во вращающемся валу ABP, и, при необходимости, амплитуда упомянутых колебаний подвергается мониторингу и оценивается их опасность; и
- вторую стадию P2 (показанную на фиг. 3B), которая реализуется в этом примере, только если на стадии P1 регистрируются крутильные колебания избыточной амплитуды, и в течение которой уровень достоверности связывается с обнаружением.
Таким образом, на стадии P1, колебательный сигнал ускорения x(t) от датчика 3A непрерывно доставляется через средство 14 связи на устройство 1 мониторинга и сохраняется в RAM 12 (этап E10).
В порядке указания, на фиг. 4A-4C представлен внешний вид сигнала x(t) для следующих примеров:
- фиг. 4A показывает сигнал x(t), полученный, когда дисбаланс в плоскости турбины равен нулю или близок к нулю (т.е. T≈0), и для крутильных колебаний малой амплитуды (в данном случае, порядка нескольких градусов);
- фиг. 4B показывает сигнал x(t), полученный, когда дисбаланс в плоскости турбины равен нулю или близок к нулю (т.е. T≈0), для крутильных колебаний большой амплитуды; и
- фиг. 4C показывает сигнал x(t), полученный в присутствие дисбаланса в плоскости турбины и дисбаланса в плоскости крыльчатки.
Как показано на этих фигурах, сигнал x(t) не является синусоидальным, но представляет асимметрии относительно своей несущей частоты Fp.
Эти асимметрии характеризуются наличием пар спектральных линий боковых полос в частотном спектре сигнала x(t) которые симметрично распределены относительно основной линии R0, которая связана с дисбалансом(ами) большей или меньшей амплитуды.
В соответствии с изобретением, анализ количества и амплитуд этих линий боковых полос, присутствующих в частотном спектре сигнала x(t), позволяет выявлять присутствие крутильных колебаний избыточной амплитуды и определять опасность идентифицированного таким образом явления.
Таким образом, частотный спектр сигнала x(t), хранящийся в памяти 12, оценивается (этап E20). Этот частотный спектр записывается X(f), где f обозначает частоту. В описанном примере, X(f) получается путем оценивания преобразования Фурье сигнала x(t), взятого в пределах временного окна, записанного как W, предварительно определенной длины. Получение частотного спектра сигнала, изменяющегося во времени, само по себе известно и не описано здесь более подробно.
В порядке примера, фиг. 5A, 5B и 5C показывают спектры X(f) сигналов x(t), показанных, соответственно, на фиг. 4A, 4B и 4C.
Можно видеть, что в этих спектрах присутствуют пары линий боковых полос, которые располагаются с обеих сторон от основной линии, которая находится на несущей частоте Fp, и которые отстоят от нее на величину частоты Fm крутильных колебаний. Эти пары линий имеют изменяющиеся амплитуды. Ri и R-i обозначают пару спектральных линий, присутствующих на частотах Fi и F-i и удовлетворяющих условиям:
 и
и 
где i - целое число.
В соответствии с изобретением, первоначально производится поиск на предмет присутствия первой пары линий боковых полос, находящихся на частотах ±Fm с обеих сторон от основной линии R0 (этап E30).
Этот поиск осуществляется с использованием техник, известных специалисту в данной области техники. Например, величины, принимаемые спектром X(f) в предварительно определенном диапазоне, выбранном около частот ±Fm, сравниваются с порогом, отображающим уровень шума.
Если поиск не позволяет обнаружить линии на частотах ±Fm, тогда делают вывод, что первая крутильная мода вала не возбуждена. В результате, предупреждение не выдается (этап E50). Затем выбирается новое окно W колебательного сигнала x(t), и этапы E20 и E30 повторяются на этом новом окне.
В противном случае, если на этапе поиска обнаруживается первая пара линий боковых полос R1 и R-1 на частотах ±Fm, то после этого определяется амплитуда этих линий. Эта амплитуда задается величинами линий в спектре X(f).
После этого, определенные таким образом относительные амплитуды первой пары линий R1 и R-1 сравниваются с предварительно заданным порогом S11 (этап E40). Термин "относительная амплитуда" употребляется здесь в смысле отношения амплитуды рассматриваемой линии к амплитуде основной линии R0.
Альтернативно, также непосредственно можно сравнивать "абсолютные" амплитуды линий R1 и R-1 с предварительно заданным порогом.
Порог S11 составляет первый порог в смысле, подразумеваемом в изобретении. Он предварительно задан, и в этом примере он представляет относительную амплитуду линий боковых полос, за пределами которой крутильные колебания вызывают опасения и требуют выдачи предупреждения или планирования технического обслуживания. Этот порог определяется экспериментально.
В другом варианте реализации, следует понимать, что этапы E30 и E40 могут быть реализованы одновременно, путем непосредственного поиска первой пары линий с использованием порога S11.
Если, по меньшей мере, одна относительная амплитуда линий R1 и/или R-1 меньше порога S11, то считается, что нет необходимости выдавать предупреждение (этап E50): затем выбирается новое окно W колебательного сигнала x(t), и этапы E20-E40 повторяются на этом новом окне.
Если наоборот обе относительные амплитуды линий R1 и R-1 превышают первый порог S11, то принимается решение выдавать предупреждающее сообщение M (этап E60).
В описанном здесь варианте реализации, это предупреждающее сообщение M связано с двумя дополнительными элементами информации, которые характеризуют предупреждение, а именно, во-первых, уровнем опасности предупреждения и, во-вторых, уровнем достоверности предупреждения.
В другом варианте реализации, предупреждающее сообщение M связано с тем или иным из этих элементов информации.
В еще одном варианте реализации, предупреждающее сообщение M отправляется сразу же после обнаружения, что амплитуды линий R1 и R-1 пересекают первый порог, причем эта информация не связана с предупреждением.
Для оценивания уровня опасности предупреждения, в спектре сигнала x(t) производится поиск, чтобы увидеть, присутствуют ли другие пары линий боковых полос (например, R2/R-2, R3/R-3 и т.д.) с обеих сторон от основной линии R0, на частотах, кратных частоте крутильных колебаний вала ABP, и определяются амплитуды этих пар линий (этап E70).
Учитываются только линии, амплитуды которых превышают предварительно определенный уровень шума.
Затем относительные амплитуды этих линий сравниваются с соответствующими предварительно определенными порогами ("третьими" порогами в смысле, подразумеваемом в изобретении) (этап E80).
Например, со ссылкой на фиг. 5A, относительные амплитуды линий R2 и R-2 сравниваются с порогом S12. Порог S12 выбирается отличным от порога S11.
Альтернативно, пороги S11 и S12 могут быть одинаковыми. Также следует понимать, что соответствующие амплитуды каждой линии в паре линий также можно сравнивать с разными соответствующими порогами.
После этого сравнения, устройство 1 мониторинга оценивает количество N пар линий боковых полос, которые симметрично распределены с обеих сторон от основной линии R0 на частотах, кратных частоте крутильных колебаний вала, и для которых амплитуды превышают третьи пороги (этап E90).
Это количество N составляет оценку уровня опасности предупреждения в смысле, подразумеваемом в изобретении: чем больше значение N, тем более опасным считается явление крутильных колебаний, которым подвергается вал ABP.
В примере на фиг. 4A, предполагается, что это количество равно 2, поскольку оно включает в себя пару линий на частотах ±Fm и пару линий на частотах ±2Fm.
Затем количество N вставляется в предварительно определенное поле сообщения M.
После этой первой стадии P1, реализуется вторая стадия P2 для установления связи уровня достоверности с предупреждающим сообщением M (фиг. 3B).
С этой целью, в описанной здесь реализации, производится поиск в сигнале x(t) на предмет присутствия характеристики, которая подтверждала бы предупреждение, идентифицированное на стадии P1, т.е. присутствие амплитудной модуляции в сигнале x(t).
Фиг. 4C показывает пример сигнала x(t), в котором можно наблюдать не только асимметрии относительно несущей частоты Fp, но также присутствие амплитудной модуляции.
Таким образом, во время стадии P2, устройство 1 мониторинга формирует сигнал x'(t) огибающей из сигнала x(t) временного ряда (этап E100).
Для этого первоначально оценивается преобразование Гильберта  сигнала x(t). Вычисление преобразования Гильберта сигнала временного ряда само по себе известно и не описано здесь более подробно.
сигнала x(t). Вычисление преобразования Гильберта сигнала временного ряда само по себе известно и не описано здесь более подробно.
Затем сигнал x'(t) огибающей в момент времени t сигнала x(t) получается с использованием следующего уравнения:
Следует понимать, что частота сигнала x'(t) огибающей равна частоте Fm крутильных колебаний вала ротора.
Затем спектр x'(t) сигнала огибающей, обозначенный X'(f), где f обозначает частоту, оценивается устройством мониторинга, с использованием преобразования Фурье, как описано выше для спектра X(f) (этап E110).
На фиг. 6 показан спектр x'(t) сигнала огибающей, соответствующего сигналу x(t), показанному на фиг. 4C. В спектре могут наблюдаться основная спектральная линия R'1 на частоте Fm крутильных колебаний, и гармоника R'2 на частоте 2Fm.
В более общем случае, следует отметить, что о присутствии амплитудной модуляции свидетельствует присутствие в спектре сигнала огибающей спектральной линии R'1, которую называют основной линией на частоте Fm крутильных колебаний вала, и, возможно, гармоник R'i на частотах F'i, кратных частоте крутильных колебаний, такой что:
где i обозначает целое число большее 1.
Таким образом, в спектре X'(f) производится поиск, чтобы определить, присутствует ли спектральная линия R'1 в сигнале X'(f) на частоте Fm крутильных колебаний вала (этап E120). Этот поиск осуществляется аналогично этапу E30 поиска.
Если ни одной линии не обнаружено (другими словами, если в колебательном сигнале x(t) не обнаружено никакой амплитудной модуляции), то предупреждающему сообщению M по умолчанию присваивается средний уровень достоверности (этап E130). В описанном здесь примере, этот средний уровень достоверности выражается флагом, установленным со значением "средний" и включенным в предварительно определенное поле сообщения M.
Если линия R'1 обнаружена, то определяется ее амплитуда: эта амплитуда задается величиной линии в спектре X'(f).
После этого, определенная таким образом амплитуда сравнивается с предварительно заданным порогом S2 (этап E140), полученным экспериментальным путем. Порог S2 является "вторым" порогом в смысле, подразумеваемом в изобретении.
Как описано выше со ссылкой на этапы E30 и E40, в другой реализации, этапы E120 и E140 можно осуществлять одновременно, путем поиска линии в сигнале X'(f) на частоте Fm крутильных колебаний непосредственно с порогом S2. Если амплитуда линии R'1 больше порога S2, то предупреждающему сообщению M присваивается высокий уровень достоверности (этап E150). В описанном здесь примере, этот высокий уровень достоверности выражается флагом, установленным со значением "высокий" и включенным в предварительно определенное поле сообщения M.
В противном случае, предупреждающему сообщению M присваивается средний уровень достоверности (т.е. флаг устанавливается со значением "средний") и оно включается в соответствующее поле сообщения (этап E130).
Другими словами, высокий уровень достоверности в смысле, подразумеваемом в изобретении, подтверждает, что обнаружены крутильные колебания избыточной амплитуды на стадии P1. Тем не менее, средний уровень достоверности не означает, что обнаружение ошибочно.
Естественно, для оценивания уровня достоверности можно принять в рассмотрение некоторое другое количество спектральных линий. Например, можно наблюдать линии, находящиеся на частоте крутильных колебаний совместно с одной или более гармониками, и соответственно адаптировать уровень достоверности.
Следует отметить, что две стадии P1 (этапы E10-E90) и P2 (этапы E100-E150) можно осуществлять с одним и тем же результатом либо одновременно, либо, напротив, последовательно (в любом порядке).
В конце этапов E130 и E150, устройство 1 мониторинга выдает предупреждающее сообщение M (этап E160). В этом примере, предупреждающее сообщение содержит уровень достоверности и уровень опасности, оцененные, соответственно, на этапах E130/E150 и E90.
В порядке примера, это сообщение M выдается средством 14 пилоту летательного аппарата, чтобы пилот мог изменить рабочую скорость турбореактивного двигателя TR.
Альтернативно, сообщение M может передаваться средством 15 на сервер оператора летательного аппарата, и оно может содержать предложение произвести техническое обслуживание турбореактивного двигателя TR.
В еще одном варианте осуществления изобретения, уровень достоверности, связанный с предупреждающим сообщением M, можно объединить, до выдачи сообщения M, с обнаруженными неисправностями, полученными из других алгоритмов мониторинга, реализованных на турбореактивном двигателе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ вибродиагностики технического состояния газоперекачивающего агрегата | 2023 |
|
RU2809309C1 |
| СПОСОБ И СИСТЕМА КОНТРОЛЯ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2009 |
|
RU2507403C2 |
| СПОСОБ МОНИТОРИНГА ДВИГАТЕЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА ВО ВРЕМЯ РАБОТЫ В ПОЛЕТЕ | 2016 |
|
RU2708905C2 |
| СПОСОБ ДЕМОДУЛЯЦИИ КРАТКОВРЕМЕННЫХ СИГНАЛОВ С МНОГОУРОВНЕВОЙ АБСОЛЮТНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ В УСЛОВИЯХ ЗАМИРАНИЙ | 2018 |
|
RU2684605C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2009 |
|
RU2496018C2 |
| АДАПТИВНОЕ МНОГОФУНКЦИОНАЛЬНОЕ КОРРЕЛЯЦИОННО-ФИЛЬТРОВОЕ УСТРОЙСТВО | 2007 |
|
RU2353050C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДЕТАЛЕЙ, УЗЛОВ И ПРИВОДНЫХ АГРЕГАТОВ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2379645C2 |
| СПОСОБ ДИНАМИЧЕСКОГО МОНИТОРИНГА ВЫСОКОМОБИЛЬНЫХ НЕЛИНЕЙНЫХ ТЕХНИЧЕСКИХ СИСТЕМ | 2020 |
|
RU2745382C1 |
| СПОСОБ ВИБРОДИАГНОСТИРОВАНИЯ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ В ЭКСПЛУАТАЦИИ ПО ИНФОРМАЦИИ БОРТОВЫХ УСТРОЙСТВ РЕГИСТРАЦИИ | 2014 |
|
RU2556477C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЧАСТОТНО-МАНИПУЛИРОВАННЫХ РАДИОСИГНАЛОВ | 2011 |
|
RU2484496C1 |
Группа изобретений относится к измерительной технике, в частности к средствам измерений крутильных колебаний. Способ содержит этапы, на которых получают колебательный сигнал ускорения от акселерометра, расположенного на неподвижной детали турбинного двигателя, оценивают частотный спектр колебательного сигнала, ищут пару спектральных линий с амплитудами, превышающими, по меньшей мере, первый порог. Причем линии распределены в спектре с обеих сторон от несущей частоты колебательного сигнала и отстоят от нее на частоту крутильных колебаний вала. Затем выполняется этап, на котором оценивают сигнал огибающей колебательного сигнала, этап на котором оценивают частотный спектр сигнала огибающей, этап поиска, на котором осуществляют поиск, по меньшей мере, одной спектральной линии в спектре сигнала огибающей, амплитуда которого превышает второй порог, и который существует на величине, кратной частоте крутильных колебаний вала; и этап, на котором оценивают уровень достоверности, связанный с предупреждающим сообщением, как функцию результата этапа поиска. В случае необходимости выдают предупреждающее сообщение. Устройство содержит акселерометр, средство приема колебательного сигнала от акселерометра, средство оценивания частотного спектра, средство поиска спектральных линий, средство оценивания сигнала огибающей, средство оценивания частотного спектра, средство оценивания уровня достоверности, средство выдачи предупреждения. Технический результат - устранение риска разрушения вала. 4 н. и 3 з.п. ф-лы, 11 ил.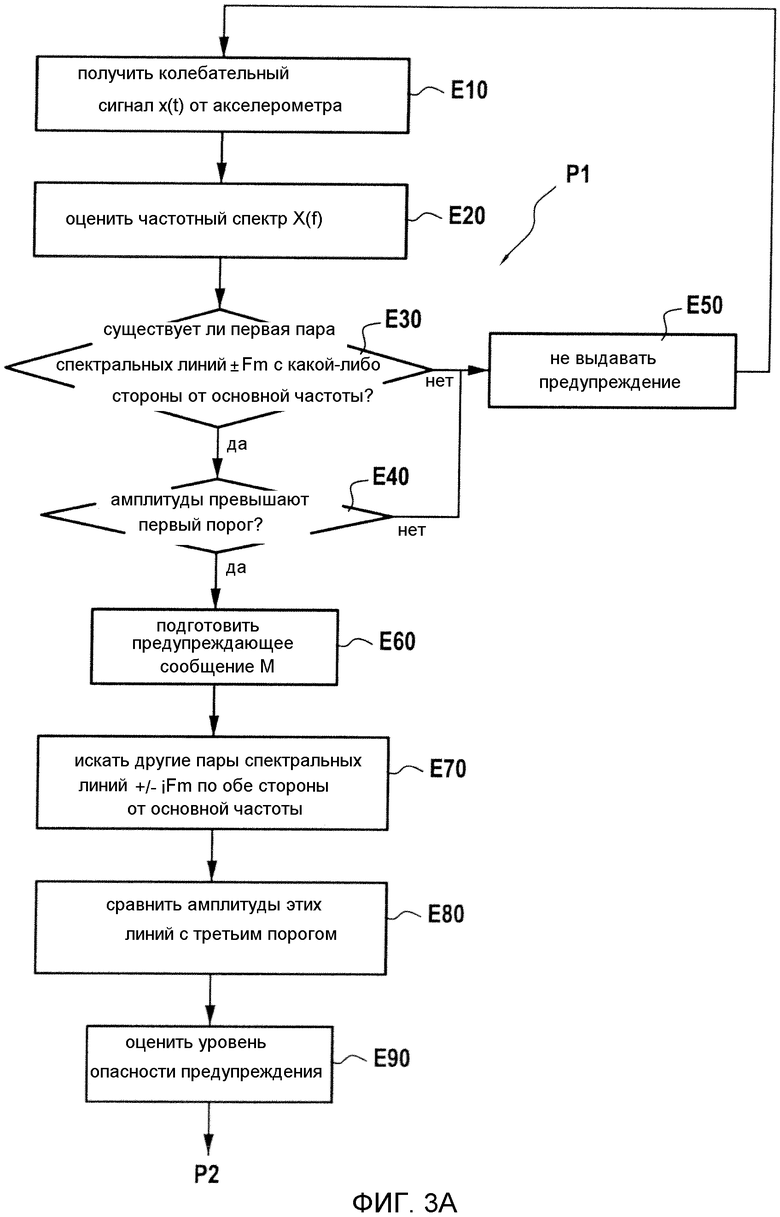
1. Способ мониторинга крутильных колебаний вращающегося вала (АВР) турбинного двигателя (TR), причем способ содержит:
- этап (Е10), на котором получают колебательный сигнал ускорения от акселерометра (3А), расположенного на неподвижной детали турбинного двигателя, причем этот колебательный сигнал характеризуется несущей частотой;
- этап (Е20), на котором оценивают частотный спектр колебательного сигнала;
- этап (Е30, Е40), на котором ищут пару спектральных линий с амплитудами, превышающими, по меньшей мере, первый порог, причем линии распределены в спектре с обеих сторон от несущей частоты колебательного сигнала и отстоят от нее на частоту крутильных колебаний вала;
- этап (Е100), на котором оценивают сигнал огибающей колебательного сигнала;
- этап (Е110), на котором оценивают частотный спектр сигнала огибающей;
- этап (Е120) поиска, на котором осуществляют поиск, по меньшей мере, одной спектральной линии в спектре сигнала огибающей, амплитуда которого превышает второй порог, и который существует на величине, кратной частоте крутильных колебаний вала; и
- этап (Е130, Е150), на котором оценивают уровень достоверности, связанный с предупреждающим сообщением, как функцию результата этапа (Е120) поиска; и
- при необходимости, этап (Е160), на котором выдают предупреждающее сообщение.
2. Способ мониторинга по п. 1, отличающийся тем, что на этапе оценивания сигнала огибающей, сигнал огибающей получают из преобразования Гильберта колебательного сигнала.
3. Способ мониторинга по п. 1, дополнительно содержащий
- этап (Е70) поиска, на котором осуществляют поиск, по меньшей мере, одной другой пары спектральных линий, распределенных в спектре колебательного сигнала с обеих сторон от несущей частоты и отстоящих от нее на величину, кратную частоте крутильных колебаний вала; и
- этап (Е90), на котором оценивают уровень опасности, связанный с предупреждающим сообщением, причем этот уровень опасности зависит от количества пар линий, найденных на этапе (Е70) поиска, амплитуды которых превышают, по меньшей мере, третий порог.
4. Читаемый компьютером носитель записи, на котором записана компьютерная программа, включающая в себя инструкции для выполнения этапов способа мониторинга по п. 1.
5. Устройство (1) мониторинга для мониторинга крутильных колебаний вращающегося вала (АВР) турбинного двигателя (TR), причем устройство содержит:
- средство (11) получения для получения колебательного сигнала ускорения от акселерометра (3А), расположенного на неподвижной детали турбинного двигателя, причем колебательный сигнал характеризуется несущей частотой;
- средство (11) оценивания для оценивания частотного спектра колебательного сигнала;
- средство (11) поиска для поиска пары спектральных линий с амплитудами, превышающими, по меньшей мере, первый порог, причем линии распределены в спектре с обеих сторон от несущей частоты колебательного сигнала и отстоят от нее на частоту крутильных колебаний вала;
- средство (11) оценивания для оценивания сигнала огибающей колебательного сигнала;
- средство (11) оценивания для оценивания частотного спектра сигнала огибающей;
- средство (11) поиска для осуществления поиска, по меньшей мере, одной спектральной линии в спектре сигнала огибающей, амплитуда которого превышает второй порог и который существует на величине, кратной частоте крутильных колебаний вала; и
- средство (11) оценивания для оценивания уровня достоверности, связанного с предупреждающим сообщением, как функции результата поиска; и
- средство (14, 15) выдачи для выдачи предупреждающего сообщения, активируемое при необходимости.
6. Устройство (1) мониторинга по п. 5, дополнительно содержащее:
- средство поиска для поиска, по меньшей мере, одной другой пары спектральных линий, распределенных в спектре колебательного сигнала с обеих сторон от несущей частоты и отстоящих от нее на величину, кратную частоте крутильных колебаний вала; и
- средство (11) оценивания для оценивания уровня опасности, связанного с предупреждающим сообщением, причем уровень опасности зависит от количества пар, найденных средством поиска, амплитуды которых превышают, по меньшей мере, третий порог.
7. Турбинный двигатель (TR), включающий в себя
- устройство (1) мониторинга по п. 5; и
- акселерометр (3А), расположенный на неподвижной детали турбинного двигателя и выполненный с возможностью доставки колебательного сигнала ускорения на устройство мониторинга.
| WO 2009129617 A1, 29.10.2009 | |||
| EP 776464 B1, 24.04.2002 | |||
| WO 1992005438 A1, 02.04.1992; | |||
| Сублимационный клей для временного закрепления деталей | 1977 |
|
SU744017A1 |
| СПОСОБ ДИАГНОСТИКИ АВТОКОЛЕБАНИЙ РАБОЧЕГО КОЛЕСА ТУРБОМАШИНЫ (ВАРИАНТЫ) | 2005 |
|
RU2296970C2 |
| JP 62151725 A, 06.07.1987 | |||

