ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится в общем к бурению и исследованиям подземных буровых скважин, таких как предназначенные для использования при разведке нефти и природного газа. В частности, данное изобретение относится к устройству и способу проведения магнитных дальнометрических измерений в подземной буровой скважине.
ИЗВЕСТНЫЙ УРОВЕНЬ ТЕХНИКИ
Методы активной магнитной дальнометрии широко используются при проведении работ по сдваиванию скважин, пересечению скважин и определению направления скважин, например, включая бурение с использованием парового самотечного дренажа (SAGD) и для добычи метана угольных пластов (CBM). Пересечение скважин при добыче метана угольных пластов обычно включает работы, при которых вертикальная, или почти вертикальная, буровая скважина пересекается с искривленной буровой скважиной (например, горизонтальной или почти горизонтальной буровой скважиной). В таких случаях обычно используют магнитный излучатель, размещенный в вертикальной (целевой) скважине, и датчик магнитного поля, размещенный в горизонтальной (пробуриваемой) скважине.
Использование электромагнитов (в качестве магнитного излучателя) при проведении работ по скважинной дальнометрии известно на протяжении многих лет. Например, патент США 3406766 на имя Henderson (выдан в 1968 году) раскрывает проведение работ по пересечению скважин, при которых создается магнитное поле с помощью скважинного электромагнита. Направленным бурением затем управляют на основе измерений магнитного поля. Патенты США 3731752 на имя Schad; 4646277 на имя Bridges et al.; и 4812812 на имя Flowerdew et al. раскрывают схожие схемы, при которых магнитное поле, индуцируемое скважинным электромагнитом, используют для управления направлением бурения подземной буровой скважины. Патент США 5485089 на имя Kuckes раскрывает проведение работ по сдваиванию скважин, при которых электромагнит с высокой напряженностью поля опускается вниз через обсаженную целевую скважину при бурении сдвоенной скважины. Датчик магнитного поля, размещенный в бурильной колонне, измеряет величину и направление магнитного поля во время бурения сдвоенной скважины для определения расстояния и направления до цели.
Хотя электромагниты использовались при промышленном применении магнитной дальнометрии, например, при проведении вышеупомянутых работ, связанных с CBM и SAGD, существуют возможности для дальнейшего усовершенствования. Например, остаются сложности расчета точного относительного положения пробуриваемой скважины относительно целевой скважины (т.е. между датчиком магнитного поля в пробуриваемой скважине и электромагнитным излучателем в целевой скважине). Сохраняется потребность в усовершенствованной электромагнитной расстановке для активных операций дальнометрии. Также сохраняется потребность в усовершенствованных способах дальнометрии, и в частности, усовершенствованных способах определения относительного положения пробуриваемой скважины относительно целевой скважины.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Типичные аспекты настоящего изобретения направлены на устранение вышеописанных недостатков способов дальнометрии известного уровня техники. Один из аспектов данного изобретения включает электромагнитную расстановку в конфигурации, предназначенной для использования при проведении работ по подземной дальнометрии. Расстановка включает множество разнесенных по оси электромагнитов, размещенных по существу соосно друг с другом в немагнитном корпусе. Расстановка дополнительно включает электрический модуль, такой как диодный мост, имеющий конфигурацию, обеспечивающую подачу электрического тока постоянной полярности на по меньшей мере первый электромагнит расстановки. Предпочтительные варианты исполнения электромагнитной расстановки имеют конфигурацию, позволяющую генерировать спектр магнитного поля, имеющего (i) один магнитный диполь, когда расстановка возбуждается электрическим током, имеющим первую полярность, и (ii) по меньшей мере, одну пару противоположных магнитных полюсов, когда расстановка возбуждается электрическим током, имеющим противоположную полярность.
Типичные примеры вариантов исполнения настоящего изобретения обеспечивают несколько потенциальных преимуществ. В частности, изобретение направлено на улучшение точности операций подземной магнитной дальнометрии. Такая повышенная точность будет в результате приводить к улучшению размещения скважин при различных работах по пересечению и сдваиванию. Изобретение дополнительно предусматривает многочисленные независимые дальнометрические методики определения относительного положения стволов скважин. Такие многочисленные способы обеспечивают возможности резервирования и повышения эксплуатационной гибкости при проведении разнообразных дальномерных работ. Эти и другие преимущества изобретения описаны более детально ниже.
В одном аспекте, настоящее изобретение включает электромагнитную расстановку, имеющую конфигурацию, предназначенную для использования в подземной буровой скважине. Расстановка включает, по существу, цилиндрический немагнитный корпус, выполненный c возможностью размещения в подземной буровой скважине. По меньшей мере, первый и второй коаксиальные электромагниты разнесены по оси на некотором расстоянии друг от друга и размещены соосно в корпусе. Электрический модуль имеет конфигурацию, позволяющую обеспечивать электрическим током постоянной полярности, по меньшей мере, первый электромагнит. В одном предпочтительном варианте исполнения расстановка имеет конфигурацию, позволяющую генерировать первый спектр магнитного поля при подаче электрического тока, имеющего первую полярность, и отличающийся от нее второй спектр магнитного поля при подаче электрического тока, имеющего вторую противоположную полярность, причем первый спектр магнитного поля содержит один магнитный диполь и второй спектр магнитного поля содержит, по меньшей мере, одну пару противоположных магнитных полюсов.
В другом аспекте, настоящее изобретение включает способ проведения измерений в буровой скважине относительно целевой скважины. Электромагнитная расстановка размещена в целевой скважине. Расстановка включает множество разнесенных на некоторое расстояние по оси электромагнитов и имеет конфигурацию, позволяющую генерировать магнитное поле, имеющее (i) первый рисунок при подаче электрического тока, имеющего первую полярность, и (ii) второй рисунок при подаче электрического тока, имеющего вторую противоположную полярность. На расстановку подаются электрические токи, имеющие первую и вторую полярности, для генерирования магнитных полей, имеющих первый и второй рисунки вокруг целевой скважины. Соответствующие векторы первого и второго магнитных полей измеряют с помощью датчика магнитного поля. Векторы первого и второго магнитных полей затем обрабатывают для определения, по меньшей мере, расстояния между датчиком магнитного поля и электромагнитной расстановкой.
Выше были в общих чертах описаны характерные признаки и технические преимущества настоящего изобретения, позволяющие лучше понять приведенное далее детальное описание изобретения. Дальше будут описаны дополнительные признаки и преимущества изобретения, являющиеся предметом формулы изобретения. Квалифицированным специалистам в данной области техники должно быть понятно, что замысел и раскрытые конкретные варианты исполнения могут быть легко использованы в качестве основы для модификации или конструирования других устройств, предназначенных для реализации целей настоящего изобретения. Квалифицированным специалистам в данной области техники также должно быть понятно, что такие эквивалентные устройства не выходят за пределы сущности и объема изобретения, изложенных в прилагаемой формуле изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для более полного понимания настоящего изобретения и его преимуществ ниже приведено следующее описание в сочетании с сопровождающими чертежами, где:
Фиг.1 иллюстрирует один из примеров электромагнитной расстановки, размещенной в подземной буровой скважине.
Фиг.2A иллюстрирует электромагнитную расстановку, приведенную на Фиг.1.
Фиг.2B иллюстрирует альтернативную электромагнитную расстановку, содержащую первый, второй и третий электромагниты.
Фиг.3A иллюстрирует один из типичных вариантов исполнения электромагнитной расстановки, представленной на Фиг.2B.
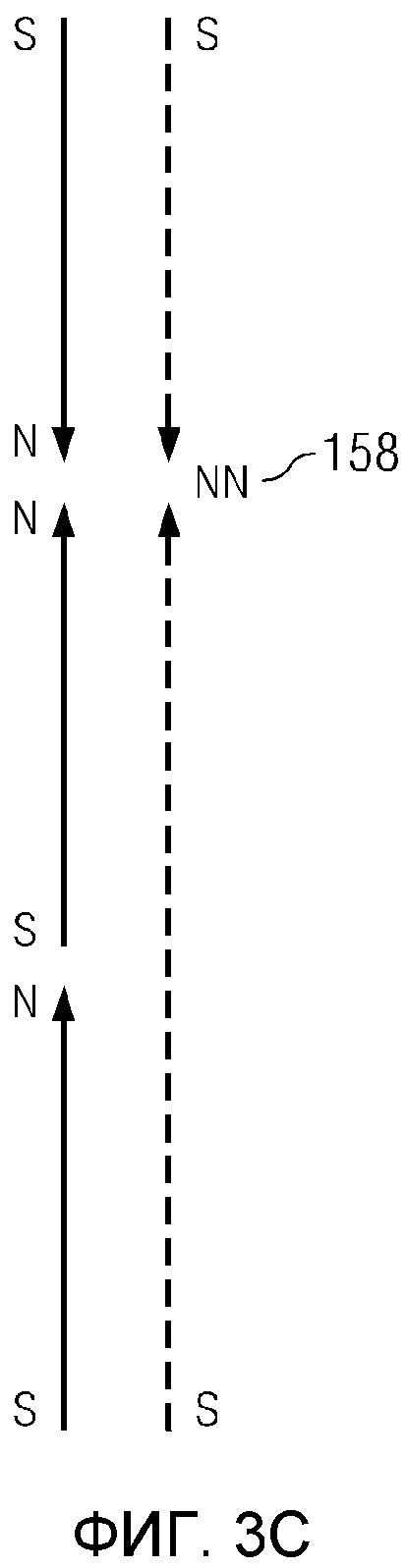
Фиг.3B и 3C иллюстрирует магнитные полярности электромагнитов 310A-C на Фиг.3A при приложенном положительном электрическом токе (Фиг.3B) и приложенном отрицательном электрическом токе (Фиг.3C).
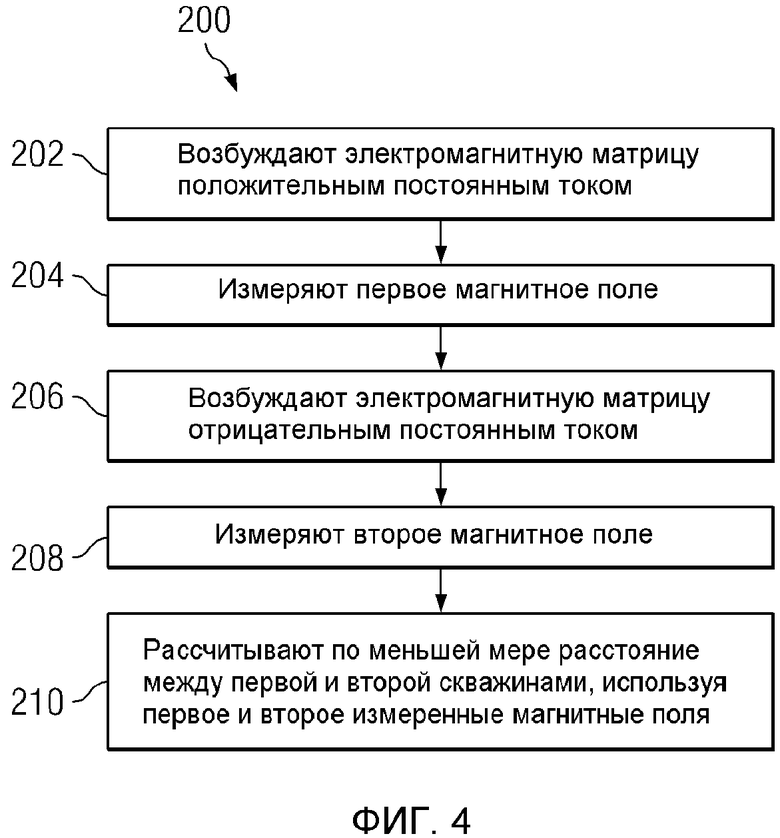
Фиг.4 иллюстрирует блок-схему одного типичного варианта реализации способа в соответствии с настоящим изобретением.
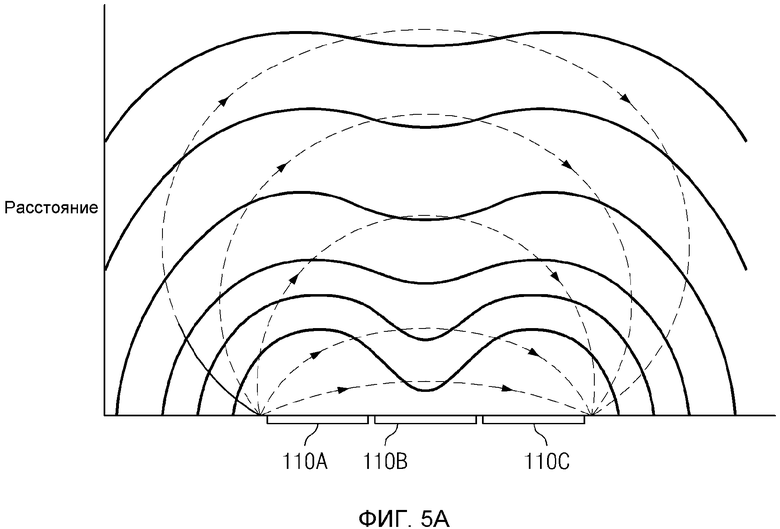
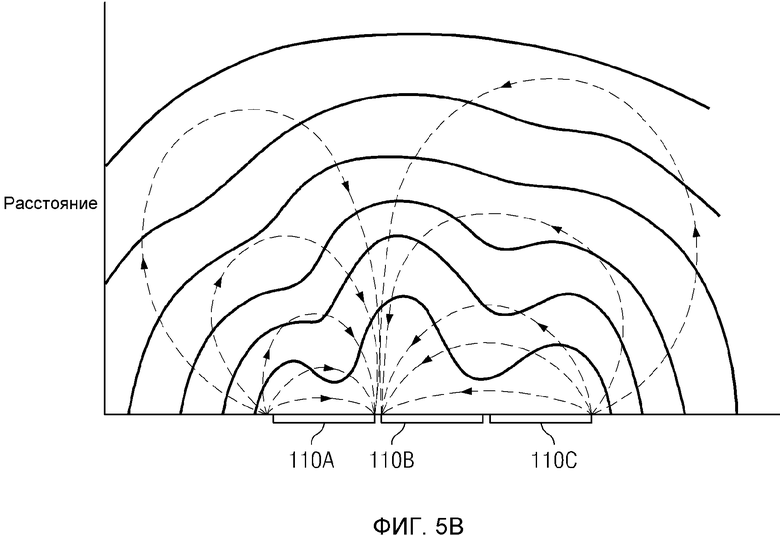
Фиг.5A и 5B иллюстрирует контурные диаграммы теоретической плотности магнитного потока вокруг буровой скважины, когда электромагнитная расстановка на Фиг.3 поляризована с первой полярностью (Фиг.5A) и со второй полярностью (Фиг.5B).
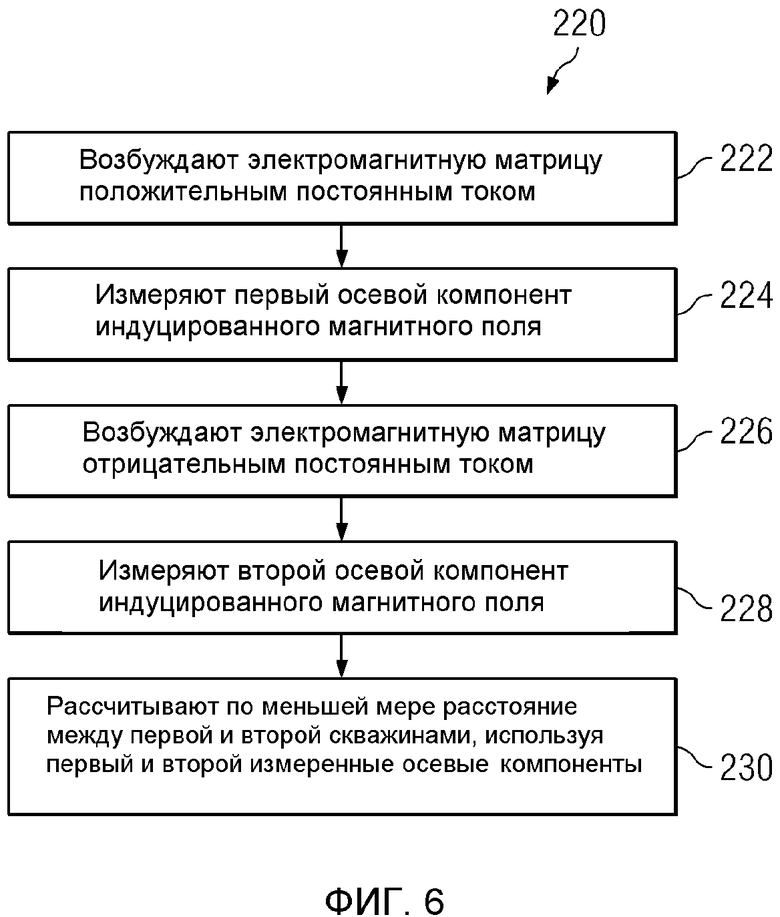
Фиг.6 иллюстрирует блок-схему другого типичного примера варианта реализации способа в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ
На Фиг.1-6 представлены варианты примеров осуществления настоящего изобретения. Касательно Фиг.1-6 следует понимать, что признаки или аспекты представленных вариантов осуществления могут быть изображены на различных видах. В тех случаях, когда такие признаки или аспекты являются общими для конкретных видов, они обозначаются одинаковыми номерами позиций. Таким образом, признак или аспект, обозначенный определенным номером позиции на одном из видов на Фиг.1-6, может быть описан здесь со ссылкой на этот же номер позиции, указанный на других видах.
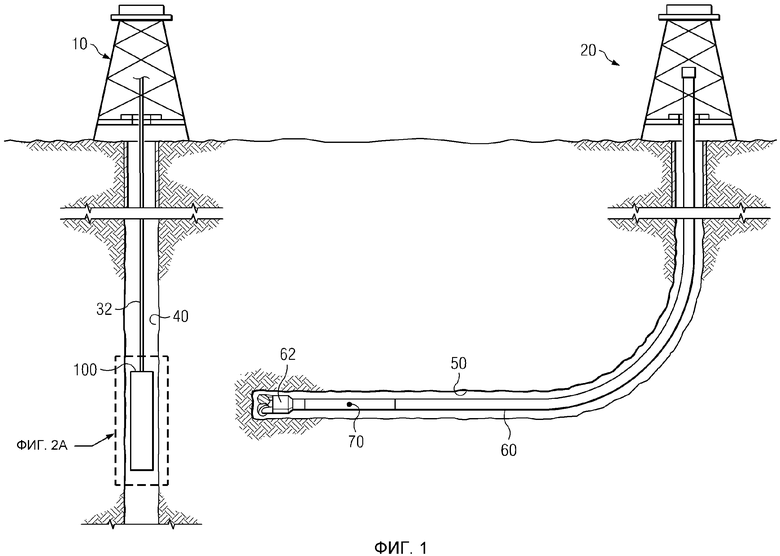
Фиг.1 иллюстрирует один из вариантов примера осуществления операции пересечения горизонтальной и вертикальной скважин в соответствии с настоящим изобретением. На Фиг.1, первая и вторая буровые установки 10 и 20 расположены над подземным нефте- или газоносным пластом (например, угольным пластом - не показано). Буровые установки могут включать, например, обычные буровые вышки и спускоподъемные механизмы для опускания разных компонентов в соответствующие стволы скважин 40 и 50 и подъема из них. На проиллюстрированном варианте осуществления изобретения показан, по существу, горизонтальный ствол скважины 50, которую пробуривают в направлении к, по существу, вертикальному стволу скважины 40, таким образом, что он пересекает (или почти пересекает) вертикальный ствол скважины 40. Следует понимать, что изобретение не ограничено геометрией стволов скважин, изображенной на Фиг.1. Изобретение также не ограничено операциями пересечения скважин.
Как изображено на Фиг.1, электромагнитная расстановка 100 в соответствии с настоящим изобретением размещена в стволе скважины 40. Расстановка 100 изображена как физически и электрически соединенная с поверхностью с помощью обычной проводной линии 32 и может быть опущена в ствол скважины 40, например, с помощью способов с использованием обычной проводной линии и/или троса для работы в скважине, известных рядовым специалистам в данной области техники. Однако, изобретение не ограничено в этом отношении. Обычная бурильная колонна 60, содержащая буровую коронку 62, размещена в стволе скважины 50. Бурильная колонна 60 дополнительно содержит магнитный измерительный инструмент (например, обычный инструмент для проведения измерений во время бурения), имеющий размещенный на нем, по меньшей мере, один датчик магнитного поля 70 (и работающий в диапазоне значений магнитного потока, генерируемом расстановкой 100). Как понятно рядовым специалистам в данной области техники, датчик магнитного поля имеет конфигурацию, позволяющую (и предназначенную для) измерения магнитного потока, создаваемого электромагнитной расстановкой 100. Такие измерения могут быть затем использованы для расчета относительного положения (например, расстояния и направления) двух скважин 40 и 50 и для управления бурением ствола скважины 40 в направлении к стволу скважины 50. Трехосный датчик магнитного поля является предпочтительным, как описано более подробно ниже, поскольку такой датчик дает возможность проводить измерения вектора трехмерного магнитного поля.
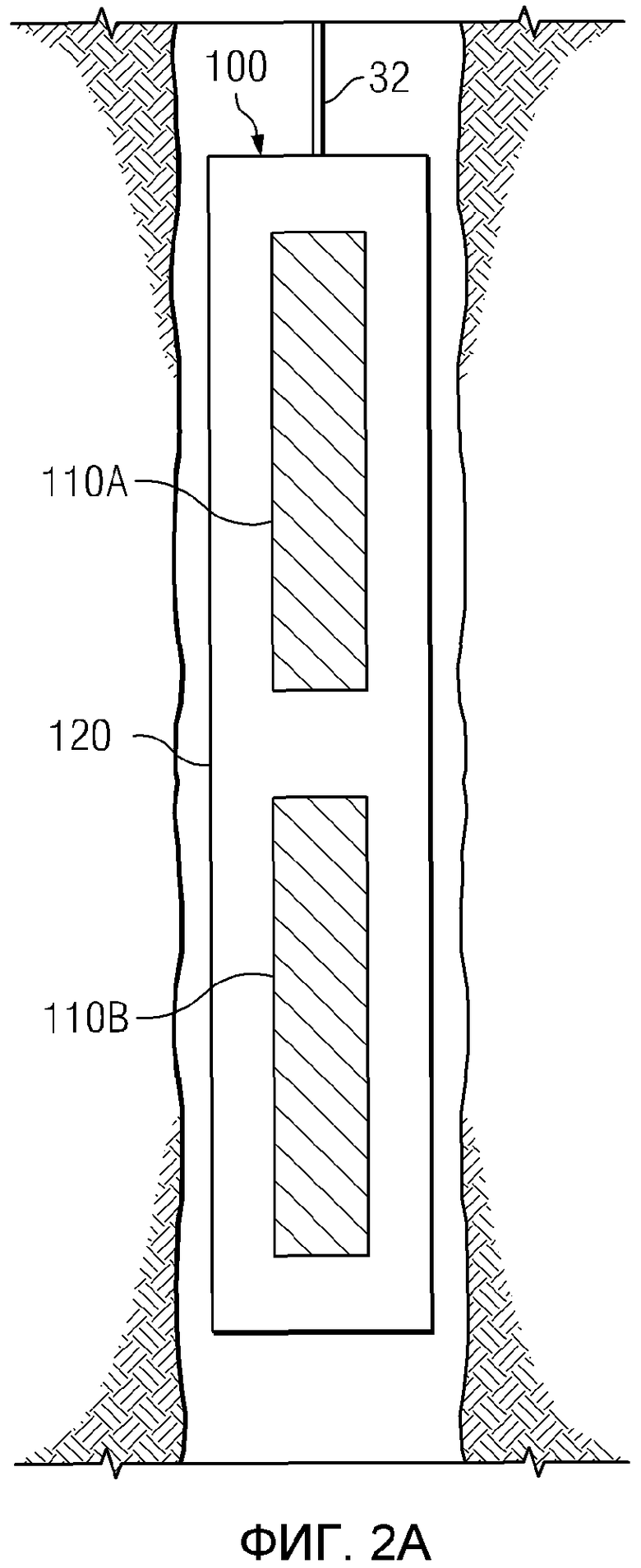
На Фиг.2A изображен пример варианта исполнения электромагнитной расстановки 100, содержащей первый и второй электромагниты 110A и 110B, размещенные в немагнитном корпусе 120. Корпус 120 может необязательно содержать (или быть оснащен) одним или несколькими центраторами (не показаны), такими как обычные ребра стабилизаторов, предназначенные, по существу, для центровки корпуса 120 в стволе скважины 40. Изобретение не ограничено какой-либо конкретной конфигурацией центрирующего устройства или даже использованием центратора. Электромагниты 110A и 110B могут быть предпочтительно разнесены по оси на некоторое расстояние друг от друга и размещены, по существу, соосно друг с другом в корпусе 120 (например, как изображено).
Могут быть использованы, по существу, любые пригодные электромагниты. Электромагниты с высокой напряженностью поля являются предпочтительными и обычно включают катушку с большим числом витков изолированного электрического проводника, намотанных на ферромагнитный сердечник. Предпочтительные электромагниты с высокой напряженностью поля обычно имеют конфигурацию, позволяющую генерировать большой магнитный поток (например, порядка 1 вебера или больше). В одном варианте примера исполнения каждый электромагнит содержит, по существу, цилиндрический сердечник из мягкого железа длиной в несколько футов (например, 4, 8 или 16 футов (1,2, 2,4 или 4,9 м)). На сердечник предпочтительно намотано несколько тысяч витков электрического проводника (например, 2000, 4000, 8000 или даже 16000 витков). Проводник предпочтительно имеет достаточный диаметр, позволяющий использовать большие электрические токи (например, 1 ампер или больше) без значительных потерь напряжения и повышения температуры.
Фиг.2B иллюстрирует альтернативный вариант исполнения электромагнитной расстановки 100′ в соответствии с настоящим изобретением, содержащей первый, второй и третий электромагниты 110A, 110B и 110C, размещенные в немагнитном корпусе 120. Электромагниты 100 и 100′ имеют конфигурацию в соответствии с настоящим изобретением, позволяющую создавать (i) один магнитный диполь, в случае, когда расстановка возбуждается электрическим током, имеющим первую полярность (например, положительную полярность), и (ii) по меньшей мере, одну пару противоположных магнитных полюсов, в случае, когда расстановка возбуждается электрическим током, имеющим вторую противоположную полярность (например, отрицательную полярность).
Одним из аспектов настоящего изобретения является идея о том, что может быть предпочтительным варьировать или изменять спектр магнитного поля, генерируемого электромагнитной расстановкой во время операции бурения (например, между последовательными дальнометрическими измерениями). Некоторые из этих преимуществ описаны более подробно ниже. Было обнаружено, что при проведении работ по пересечению скважин (особенно, пересечению горизонтальных и вертикальных скважин, как изображено на Фиг.1), наиболее предпочтительным является изменение спектра дипольного магнитного поля, не имеющего противоположных магнитных полюсов (магнитный диполь), на спектр магнитного поля, содержащий, по меньшей мере, одну пару противоположных магнитных полюсов. Дипольный спектр способен обеспечивать максимальную чувствительность на больших расстояниях (большие расстояния между пробуриваемой скважиной и целевой скважиной), в то время как спектр, содержащий, по меньшей мере, одну пару противоположных магнитных полюсов, способен обеспечивать более точное определение относительного направления между двумя скважинами. Кроме того, спектр, содержащий, по меньшей мере, одну пару противоположных магнитных полюсов, позволяет улучшить определение направления пробуриваемой скважины по отношению к определенному осевому положению целевой скважины (например, направление прямо на пару противоположных магнитных полюсов).
Такое изменение спектра магнитного поля может быть легко реализовано, например, путем раздельного монтажа каждого из электромагнитов в расстановке и изменения полярности (направления тока) для разных электромагнитов в зависимости от потребности. Хотя такая конструкция является осуществимой, она требует прокладки многожильных кабелей с поверхности к электромагнитной расстановке. Такие многожильные кабеля будут значительно толще и более дорогими, чем одножильный кабель. Поэтому их использование не является предпочтительным.
Хотя Фиг.2A и 2B изображают варианты исполнения расстановки, включающие два и три электромагнита, следует понимать, что изобретение не ограничено использованием любого конкретного числа электромагнитов. В определенных областях применения (например, при работах, требующих определения больших расстояний), для удлинения расстановки могут быть предпочтительно использованы дополнительные электромагниты. Модульный характер расстановки, в соответствии с изобретением, позволяет обеспечить простоту добавления дополнительных электромагнитов.
Фиг.3A иллюстрирует одну из типичных конструкций электромагнитной расстановки 100′. В изображенном типичном варианте исполнения электромагнит 110A соединен с источником электроэнергии через диодный мост 130A. Как известно рядовым специалистам в электротехнике, диодный мост представляет собой схему расположения диодов в конфигурации, обеспечивающей независимость полярности на выходе сигнала от полярности на входе. В изображенном типичном варианте исполнения диодный мост 130A имеет такую конфигурацию, что электромагнит 110A генерирует магнитное поле в первом направлении (например, вниз, как изображено на Фиг.3B и 3C) независимо от полярности источника (т.е. изменение полярности приложенного электрического тока не влияет на направление магнитного поля). Рядовые специалисты в электротехнике легко поймут, что изобретение не ограничено конкретной конфигурацией диодного моста, изображенной на Фиг.3A. Изобретение может включать, по существу, любой пригодный электрический модуль, обеспечивающий постоянную полярность на выходе независимо от полярности на входе.
В изображенном типичном варианте исполнения электромагниты 110B и 110C присоединены непосредственно к источнику электроэнергии, как показано на чертеже, таким образом, чтобы они поляризовались в одинаковом направлении (т.е. оба вниз или оба вверх). Когда на расстановку подается электроэнергия, имеющая первую полярность, генерируется магнитное поле, имеющее дипольный спектр (не имеющий пар противоположных полюсов), обозначенный 156 на Фиг.3B. Когда полярность приложенного электрического тока меняется на обратную, магнитное поле, генерируемое электромагнитами 110B и 110C, аналогично, меняется на противоположное, создавая спектр магнитного поля, имеющего одну пару противоположных магнитных полюсов 158 (в изображенном типичном варианте исполнения - NN), расположенных между электромагнитами 110A и 110B, как показано на Фиг.3C.
Рядовым специалистам в данной области техники будет понятно, что электромагниты, проиллюстрированные на Фиг.3A, представлены в последовательном соединении. Такое последовательное соединение может быть предпочтительным в определенных случаях, поскольку оно обеспечивает то, что произведение электрического тока на число витков катушки (обмотки) будет одинаковым для каждого электромагнита расстановки. Благодаря этому обеспечивается генерирование электромагнитами, по существу, равных магнитных потоков. Следует понимать, что изобретение не ограничено в этом отношении, поскольку электромагниты также могут быть соединены параллельно, и что изображенные мостовые диоды также могут быть, при желании, использованы для любого индивидуального электромагнита.
Фиг.1 и 4 изображают один из типичных вариантов исполнения способа, в котором электромагнитная расстановка, в соответствии с настоящим изобретением, может быть предпочтительно использована при проведении операций подземной магнитной дальнометрии. Фиг.4 демонстрирует блок-схему одного такого типичного варианта исполнения магнитной дальнометрии 200 в соответствии с настоящим изобретением. Электромагнитная расстановка (например, расстановка 100 или 100′) размещена в первой подземной буровой скважине и подключена к источнику положительного постоянного тока 202. Возбуждение расстановки генерирует магнитное поле, имеющее первый рисунок, в подземной формации (например, как изображено на Фиг.5A, которая более подробно описана ниже). Датчик магнитного поля, размещенный по второй подземной буровой скважине, используют для измерения вектора первого магнитного поля 204. Датчик магнитного поля может быть размещен, например, в бурильной колонне, которая, в свою очередь, размещена во второй буровой скважине (например, как изображено на Фиг.1). Электромагнитная расстановка затем возбуждается отрицательным постоянным током 206. Возбуждение расстановки отрицательным током генерирует магнитное поле, имеющее отличный второй рисунок в подземной формации (например, как изображено на Фиг.5B). Датчик магнитного поля затем используют для измерения вектора второго магнитного поля 208. Показатели первого и второго магнитных полей (измеренные на стадиях 204 и 208) обрабатывают на стадии 210 для расчета относительного положения датчика по отношению к расстановке (которое связано с расстоянием и/или направлением между первой и второй подземными буровыми скважинами). Хотя это не изображено на блок-схеме, этот процесс может, предпочтительно, повторяться любое число раз в процессе бурения второй буровой скважины.
Следует понимать, что питание на электромагнитную расстановку типично подается с поверхности (поскольку для создания магнитного поля достаточной напряженности обычно требуется электроэнергия высокой мощности). Как описано выше, расстановка предпочтительно физически и электрически соединена с поверхностью с помощью обычной проводной линии или гибкого одножильного кабеля. Также будет понятно, что полярность постоянного электрического тока предпочтительно (хотя не обязательно) задается с поверхности. Это может быть осуществлено с помощью обычных ручных или автоматических механизмов переключения, известных рядовым специалистам в данной области техники. Изменения электрической полярности также могут производиться путем использования переменного тока (AC), например, низкочастотного синусоидального или квадратно-волнового переменного тока. Изобретение не ограничено какими-либо конкретными схемами соединения проводов или любыми конкретными средствами контроля полярности.
Векторы первого и второго магнитных полей, измеренные на стадиях 204 и 208, предпочтительно представляют собой трехмерные векторы, измеренные с помощью трехосного датчика магнитного поля (например, трехосного магнитометра). В таких вариантах исполнения, датчик включает три взаимно ортогональных датчика магнитного поля, один из которых предпочтительно ориентирован по существу параллельно оси буровой скважины. Такие схемы расположения датчиков являются обычными в технике и широко используются при подземных изысканиях и операциях магнитной дальнометрии. Трехмерный вектор магнитного поля может быть представлен как включающий компоненты x, y и z (обозначенные тут MX, MY и MZ). Как принято в технике, компонент z обычно считается параллельным оси ствола измерительной скважины (второй буровой скважины, описанной выше со ссылкой на Фиг.4). Как более подробно описано ниже, типичные варианты исполнения способа по данному изобретению могут требовать проведения измерений магнитного поля только в направлении продольной оси бурильной колонны (MZ).
Магнитное поле вокруг возбужденной электромагнитной расстановки может быть измерено и представлено, например, в виде вектора, величина и ориентация которого зависят от положения точки измерения в магнитном поле. Для определения вектора магнитного поля, создаваемого расстановкой в любой точке скважины, типично вычитают магнитное поле земли из измеренного вектора магнитного поля, хотя изобретение не ограничено в этом отношении. Магнитное поле земли (включая компоненты величины и направления) обычно известно, например, из результатов предшествующих геологических изысканий или геомагнитной модели. Однако, в некоторых случаях могут быть предпочтительными измерения магнитного поля в реальном масштабе времени на месте проведения работ в точке, по существу свободной от магнитных помех, например, на поверхности скважины или в ранее пробуренной скважине. Измерение магнитного поля в реальном масштабе времени обычно является предпочтительным потому, что позволяет учесть зависящие от времени вариации магнитного поля земли, например, вызываемые солнечными ветрами. Однако, в определенных условиях, таких как на морской буровой установке, измерение магнитного поля земли в реальном масштабе времени может быть непрактичным. В таких случаях, может быть предпочтительным использование результатов предшествующих геологических изысканий в комбинации с пригодными алгоритмами интерполирования и/или математического моделирования (т.е. компьютерного моделирования).
Магнитное поле земли у скважинного датчика и в системе координат скважинного инструмента, включающего датчик, может быть записано, например, таким образом:
MEX = HE(cos D sin Az cos R + cos D cos Az cos Inc sin R - sin D sin Inc sin R)
MEY = HE(cos D cos Az cos Inc cos R + sin D sin Inc cos R - cos D sin Az sin R)
MEZ = HE(sin D cos Inc - cos D cos Az sin Inc) Уравнение 1,
где MEX, MEY и MEZ обозначают компоненты x, y и z, соответственно, магнитного поля земли, измеренные у скважинного инструмента, где компонент z ориентирован по оси буровой скважины, HE является известным (или измерен, как описано выше) и представляет собой величину магнитного поля земли, и D, который также является известным (или измеренным), обозначает местное магнитное наклонение. Inc, Az и R обозначают угол склонения, азимут (относительно магнитного севера) и угол поворота (также известный как отклонение от оси тяготения передней поверхности инструмента (gravity tool face)), соответственно, магнитного измерительного инструмента, которые могут быть получены, например, обычными методами проведения геологоразведочных работ.
Векторы магнитного поля, создаваемого электромагнитной расстановкой (которые называются тут векторами помех) могут тогда быть представлены следующим образом:
MTX = MX - MEX
MTY = MY - MEY
MTZ = MZ - MEZ Уравнение 2
где ΜΤΧ, ΜΤY и MTZ обозначают компоненты x, y и z, соответственно, вектора помех магнитного поля, создаваемого электромагнитной расстановкой в целевой скважине, и MΧ, ΜY и MZ, как описано выше, обозначают измеренные векторы магнитного поля в направлениях x, y и z, соответственно.
Рядовой специалист легко поймет, что при определении вектора помех магнитного поля также может быть необходимо вычесть другие компоненты магнитного поля из измеренных векторов магнитного поля. Например, такие другие компоненты магнитного поля могут быть вызваны помехами со стороны бурильной колонны, буровой коронки, отклоняющего инструмента и/или двигателя буровой установки. Методики учета таких помех хорошо известны специалистам. Кроме того, магнитные помехи могут создаваться другими близко расположенными обсаженными буровыми скважинами.
Относительное положение (например, расстояние и/или направление) между стволами первой и второй скважин может быть предпочтительно рассчитано, например, с помощью магнитных моделей индуцированного магнитного поля вокруг положительно и отрицательно возбужденной электромагнитной расстановки (т.е. вокруг ствола первой скважины при возбуждении размещенной в ней расстановки). Магнитное поле вокруг открытой буровой скважины, в которой размещена и возбуждается электромагнитная расстановка, может быть смоделировано, например, с использованием обычных методов конечных элементов. Фиг.5A изображает контурную диаграмму магнитной индукции и линии магнитного потока вокруг открытой буровой скважины с размещенной в ней электромагнитной расстановкой, схожей с изображенной на Фиг.2B, возбуждаемой электрическим током, имеющим положительную полярность. Сплошные линии изображают плотность потока, а пунктирные линии - линии магнитного потока. Фиг.5B изображает плотность потока (сплошные линии) и линии магнитной индукции (пунктирные линии) для той же самой электромагнитной расстановки при подаче электрического тока, имеющего отрицательную полярность. Каждый из трех электромагнитов в моделируемой расстановке имеет длину 8 футов (2,44 м) и включает 5000 витков электрического проводника вокруг сердечника из кремнистого железа (SiFe) диаметром два дюйма (4,9 см). Электромагнитная расстановка размещена в открытой буровой скважине (необсаженной) и возбуждается постоянным (DC) током силой, например, от 1 до 5 ампер в зависимости от требуемой дальности измерений и диапазона чувствительности магнитного датчика, размещенного в бурильной колонне. Например, может потребоваться уменьшение электрического тока с уменьшением расстояния для предотвращения насыщения датчика магнитного поля. Следует понимать, что изобретение никоим образом не ограничено такими типичными модельными предположениями. Следует также понимать, что термины плотность магнитного потока и напряженность магнитного поля используются тут взаимозаменяемо, исходя из предположения, что они являются по существу пропорциональными друг другу, и что измеренная величина любого одного из них может быть преобразована в другую с помощью известных математических вычислений.
Как изображено на Фиг.5A, спектр магнитного поля вокруг электромагнитной расстановки 100′ является схожим с спектром магнитного диполя с линиями магнитного потока (пунктирными линиями), проходящими от одного конца расстановки через участок формации к другому концу расстановки. Плотность потока уменьшается с увеличением расстояния от расстановки с образованием поверхностей постоянной магнитной индукции (постоянной напряженности поля), имеющих по существу форму овалоида на расстояниях, превышающих примерное значение длины расстановки (расстояния более примерно 25 футов (7,6 м) в изображенном примере). Кроме того, направление магнитного потока на таких расстояниях является приблизительно параллельным оси расстановки (т.е. параллельным целевой скважине).
Как изображено на Фиг.5B, спектр магнитного поля вокруг расстановки 100′ значительно отличается (например, является менее однородным) от изображенного на Фиг.5A из-за индуцированной пары противоположных магнитных полюсов между электромагнитами 110A и 110B. Кроме того, линии магнитного потока будут направлены в сторону расстановки 100′, особенно вблизи оси электромагнитов 110A и 110B, даже на расстояниях, превышающих длину расстановки. В типичном варианте исполнения, описанном со ссылкой на Фиг.5A и 5B, положительный постоянный ток представлен как генерирующий магнитный диполь, в то время как отрицательный постоянный ток представлен как генерирующий спектр магнитного поля, имеющий одну пару противоположных магнитных полюсов. Изобретение не ограничено в этом отношении. Следует понимать, что полярность электрического тока определяется чисто условно. Изобретение не ограничено такими принятыми условностями.
Математические модели, такие как описанные выше со ссылкой на Фиг.5A и 5B, могут быть использованы для создания карт магнитного поля вокруг целевой скважины вблизи электромагнитной расстановки. При выполнении работ, связанных с дальнометрическими измерениями, таких как операция пересечения скважин, изображенная на Фиг.1, результаты измерений магнитного поля могут быть введены в модель (например, в таблицу соответствия или эмпирический алгоритм, основанный на данной модели) для определения расстояния до целевой скважины. Различные дальнометрические методики описаны более подробно в переданных в общественную собственность патентах США 7617049 и 7656161.
Каждый из векторов магнитного поля, измеренных на стадиях 204 и 208 способа 200 (Фиг.5), связан с расстоянием между датчиком магнитного поля и электромагнитной расстановкой (которое связано с расстоянием между двумя скважинами) и осевым положением датчика магнитного поля относительно точки на продольной оси электромагнитной расстановки. Рядовым специалистам в данной области техники будет хорошо понятно, что любой вектор может быть аналогично определен или (i) величинами первого и второго расположенных в одной плоскости ортогональных компонентов вектора, или (ii) величиной и направлением (углом) относительно некоторой расположенной на плоскости точки отсчета. Аналогично, векторы магнитного поля, измеренные способом 200 (или расчетные векторы помех магнитного поля) могут быть определены или (i) величинами первого и второго расположенных в одной плоскости ортогональных компонентов, или (ii) величиной и направлением (углом). В типичном варианте исполнения, описанном более подробно ниже, такие векторы определены величиной и направлением. В общем, угол, равный 0 градусов, соответствует перпендикулярному компоненту и поэтому обозначает направление, направленное под прямым углом от расстановки. Угол в 90 градусов соответствует параллельному компоненту и потому обозначает направление параллельно расстановке в сторону увеличения измеренной глубины цели. Изобретение, конечно, не ограничено такими произвольными условностями. Изобретение также не ограничено определением векторов величиной и направлением. Рядовые специалисты в данной области техники могут легко использовать по существу любые способы представления и описания векторов.
Первый и второй измеренные векторы магнитного поля (или расчетные векторы магнитных помех) могут быть выражены математически, например, следующим образом:
M1 = fp1(d,l)
ϕ1 = fp2(d,l)
M2 = fn1(d,l)
ϕ2 = fn2(d,l) Уравнение 3
где M1 и ϕ1 определяют первый вектор магнитного поля, M2 и ϕ2 определяют второй вектор магнитного поля, d представляет собой расстояние между двумя скважинами, l обозначает относительное осевое положение датчиков магнитного поля на оси расстановки, fp1(•) и fp2(•) представляют собой первую и вторую математические функции (или эмпирические соотношения), которые определяют M1 и ϕ1 через d и l, когда расстановка возбуждается источником постоянного тока, имеющего положительную полярность, fn1(•) и fn2(•) представляют собой первую и вторую математические функции (или эмпирические соотношения), которые определяют M2 и ϕ2 через d и l, когда расстановка возбуждается источником постоянного тока, имеющего отрицательную полярность.
Математические функции/соотношения fp1(•), fp2(•), fn1(•) и fn2(•) могут быть определены с использованием по существу любой пригодной методики. Например, в одном типичном варианте исполнения данного изобретения, эмпирические модели могут генерироваться путем проведения измерений магнитного поля по двухмерной расстановке (решетке) с известными ортогональными расстояниями d и нормированными осевыми положениями l относительно возбуждаемого с поверхности электромагнита. Известные методы интерполяции и экстраполяции могут быть затем использованы для определения векторов магнитного поля по существу в любом положении относительно расстановки (тем самым эмпирически определяя fp1(•), fp2(•), fn1(•) и fn2(•)). В другом типичном варианте исполнения данного изобретения, fp1(•), fp2(•), fn1(•) и fn2(•) могут быть определены с помощью математических моделей (например, моделей конечных элементов или моделей дифференциальных уравнений) индуцированного намагничивания, когда расстановка возбуждается положительным и отрицательным постоянными токами. Типичные модели конечных элементов изображены на Фиг.5A и 5B.
После измерения векторов магнитного поля (например, величины и угла векторов), d и l могут быть определены с использованием по существу любых пригодных методик. Например, d и/могут быть определены графически по Фиг.5A и/или 5B с использованием известных графических методов решения. Альтернативно, d и l могут быть определены математически, например, путем математического обращения Уравнения 7, так чтобы:
d = fp3(Μ1,ϕ1)
l = fp4(Μ1,ϕ1)
d = fn3(Μ2,ϕ2)
l = fn4(M2,ϕ2) Уравнение 4
где d, l, M1, M2, ϕ1 и ϕ2 имеют значения, определенные выше, и fp3(•) и fp4(•) представляют собой математические функции, определяющих d и l через M1 и ϕ1, когда расстановка возбуждается постоянным током, имеющим положительную полярность, и fn3(•) и fn4(•) представляют собой математические функции, определяющие d и l через M2 и ϕ2, когда расстановка возбуждается постоянным током, имеющим отрицательную полярность. Следует понимать, что могут быть использованы по существу любые известные математические методы обращения, включая известные аналитические и численные методы. Уравнение 4 типично (хотя не обязательно) решается относительно d и l с использованием известных численных методов, например, последовательных решающих устройств одномерных уравнений. Изобретение не ограничено в этом отношении.
Следует понимать, что способ 200 (Фиг.4) предпочтительно позволяет выполнять по меньшей мере первое и второе определения d и l с использованием соответствующих векторов первого и второго магнитных полей. Такие независимые измерения проводятся с использованием разных спектров магнитных полей и потому способствуют уменьшению помех и улучшению точности дальномерных измерений. Измеренные векторы магнитного поля также могут быть объединены (например, сложены или вычтены один из другого) и использованы для определения других d и l. Например, модель результирующего вектора может быть сгенерирована и решена, как описано выше. Результирующий вектор также может быть получен, например, путем использования одной или двух векторных величин от первого измерения и другой векторной величины от второго измерения (например, объединения M1 и ϕ2 или M2 и ϕ1).
Первый и/или второй векторы магнитного поля, измеренные на стадиях 204 и 208 способа 200, могут быть дополнительно использованы для расчета направления к электромагнитной расстановке (например, относительно магнитного севера или географического севера). Это можно осуществить, например, путем транспозиции расчетного вектора помех магнитного поля на вид сверху (т.е. горизонтальную проекцию). Рядовым специалистам в данной области техники будет хорошо понятно, что азимутальный угол транспонированного вектора помех магнитного поля эквивалентен направлению между электромагнитной расстановкой и датчиком магнитного поля. Как изображено на Фиг.5B, спектр магнитного поля, включающего по меньшей мере одну пару противоположных полюсов, обычно имеет более сильный горизонтальный компонент (т.е. компонент магнитного поля, направленный к электромагнитной расстановке). Таким образом, направление предпочтительно определяют при возбужденной электромагнитной расстановке для создания по меньшей мере одной пары противоположных магнитных полюсов.
Способ 200 может дополнительно включать повторное позиционирование датчика магнитного поля в одном или нескольких других геометрических положениях относительно электромагнитной расстановки (например, при продолжении бурения измерительной скважины) и затем повторение стадий 202-210 для выполнения дополнительных дальнометрических измерений. Такие многочисленные дальнометрические измерения могут быть использованы для управления бурением измерительной скважины в направлении к целевой скважине (или в определенном направлении относительно целевой скважины).
Множество измерений магнитного поля, проведенных в соответствующем множестве относительных положений (как описано в предыдущем абзаце) также позволяет определять относительное положение двух скважин с использованием других способов. Например, получение результатов многочисленных измерений магнитного поля позволяет использовать обычные методы двухмерной и трехмерной триангуляции. Переданный в общественную собственность патент США 6985814 раскрывает метод триангуляции, используемый для операций пассивной дальнометрии.
Относительное положение двух скважин также может быть определено по изменениям (например, величины и/или направления) измеренных магнитных векторов (или помех) между любыми двумя или больше разнесенными по оси измерениями. Первое и второе измерения магнитного поля могут быть проведены одновременно первым и вторым разнесенными в продольном направлении датчиками магнитного поля (например, расположенными на определенном расстоянии по длине бурильной колонны) или последовательно во время бурения сдвоенной скважины. Изобретение не ограничено в этом отношении. Использование трех или более измерений на известных расстояниях может быть предпочтительно использовано для уменьшения помех при измерениях и, тем самым, повышения точности определения расстояний. Многочисленные измерения могут также позволить определять другие представляющие интерес параметры (например, угол сближения измерительной скважины с целевой скважиной).
Фиг.6 иллюстрирует блок-схему другого варианта реализации способа в соответствии с настоящим изобретением, в котором относительное положение измерительной скважины относительно целевой скважины также может быть определено по существу в реальном масштабе времени в процессе бурения (т.е. без остановки). Электромагнитная расстановка (например, расстановка 100 или 100′) размещена в стволе первой скважины и возбуждается положительным постоянным током на стадии 222. Первый осевой компонент вектора магнитного поля (например, MZ или MTZ) измеряют в стволе второй скважины во время бурения на стадии 224 с помощью датчика магнитного поля, размещенного в бурильной колонне. Электромагнитную расстановку затем возбуждают отрицательным постоянным током на стадии 226. Второй осевой компонент вектора магнитного поля затем измеряют во время бурения на стадии 228. Первый и второй осевые компоненты (измеренные на стадиях 224 и 228) затем обрабатывают на стадии 230 для расчета расстояния между первой и второй подземными буровыми скважинами. Хотя это не изображено на блок-схеме, этот процесс предпочтительно повторяют множество раз при проведении работ во второй буровой скважине. Квалифицированным специалистам в данной области техники хорошо понятно, что относительное положение между двумя скважинами является по существу неизменным между 224 и 228, поскольку эти измерения могут быть выполнены в быстрой последовательности (например, через несколько секунд одно за другим).
Математические модели, такие как описанные выше со ссылкой на Фиг.5A и 5B, могут быть использованы для создания карт магнитного поля вокруг целевой скважины вблизи электромагнитной расстановки. Такие карты включают по меньшей мере осевой компонент магнитного поля как функцию радиального расстояния от расстановки и осевого положения по длине расстановки. Радиальное расстояние и осевое положение часто могут быть однозначно определены путем итерационного решения. Например, геометрическое место возможных расстояний и осевых положений (т.е. геометрическое место возможных точек на двухмерной карте) может быть получено из первого осевого компонента, измеренного на стадии 224, с использованием первой карты. Отдельное значение расстояния и осевого положения может быть затем выбрано с использованием второго осевого компонента, измеренного на стадии 228, и второй карты.
Хотя относительное расстояние и осевое положение могут быть определены по одной паре динамических осевых измерений магнитного поля (как описано выше со ссылкой на Фиг.6), использование многочисленных пар является предпочтительным. Таким образом, изменения величин осевых компонентов как функции изменения положения датчика магнитного поля могут быть использованы для определения местоположения измерительной скважины. Неохраняемый более патент США 7617049, описывает один из способов, в котором измерения осевого компонента по существу в реальном времени могут быть использованы для определения расстояния между сдвоенной и целевой скважинами.
Несмотря на то, что здесь детально описаны настоящее изобретение и его преимущества, следует понимать, что различные изменения, замены и чередования могут выполняться без выхода за пределы сущности и объема изобретения, определяемого приложенной формулой изобретения.


Изобретение относится к области геофизики и может быть использовано при разведке нефти и природного газа. Электромагнитная расстановка содержит множество размещенных по оси электромагнитов, расположенных в немагнитном корпусе. Расстановка дополнительно содержит электрический модуль, такой как диодный мост, имеющий конфигурацию, обеспечивающую электрический ток постоянной полярности для по меньшей мере первого электромагнита расстановки. Расстановка может иметь конфигурацию, обеспечивающую создание спектра магнитного поля, который содержит один магнитный диполь, в случае, когда расстановка возбуждается электрическим током первой полярности, и по меньшей мере одну пару противоположных магнитных полюсов в случае, когда расстановка возбуждается электрическим током противоположной полярности. Изобретение предусматривает многочисленные независимые дальнометрические методы определения относительного положения между стволами скважин. Технический результат - повышение точности операций подземной магнитной дальнометрии. 4 н. и 8 з.п. ф-лы, 10 ил.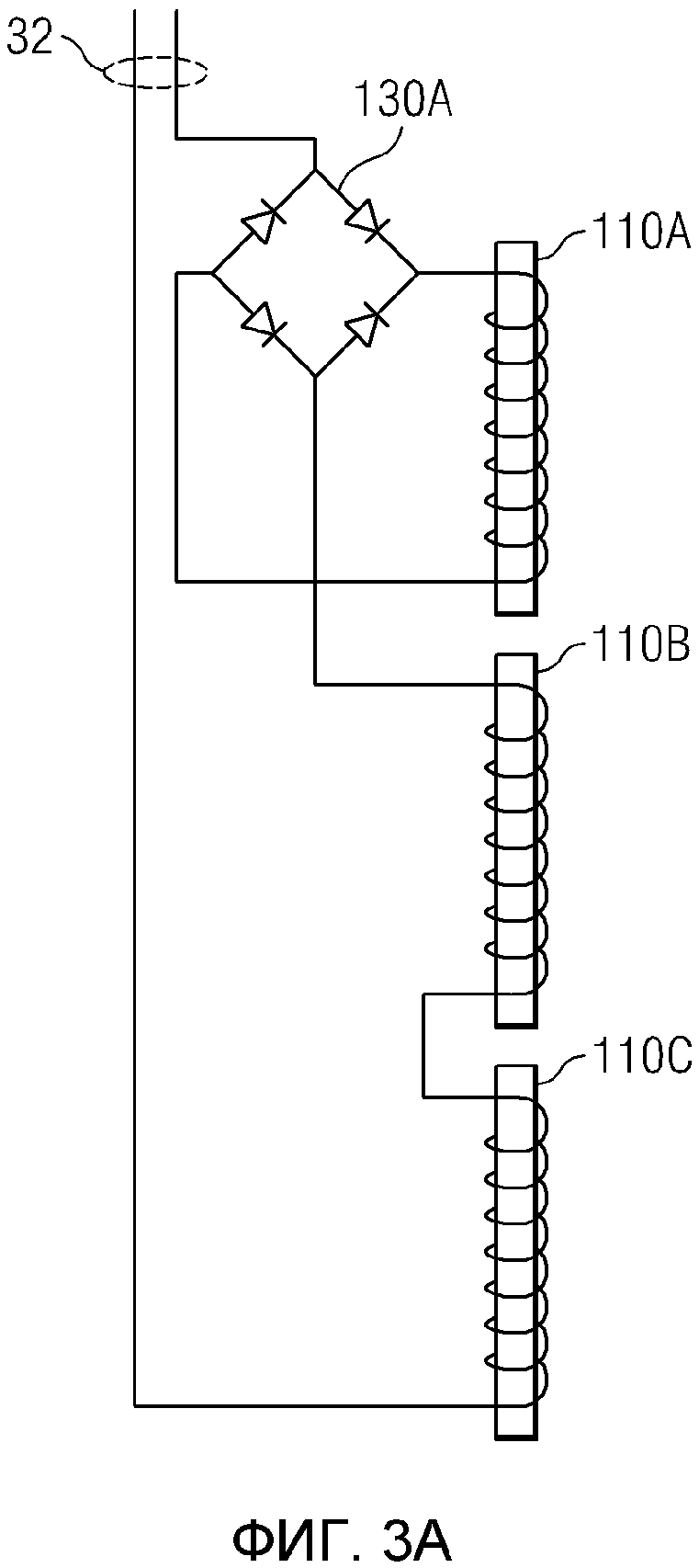
1. Электромагнитная расстановка, имеющая конфигурацию, предназначенную для использования в подземной буровой скважине, которая содержит:
по существу, цилиндрический немагнитный корпус, выполненный для размещения в подземной буровой скважине;
по меньшей мере, первый и второй электромагниты, размещенные в корпусе, разнесенные по оси и, по существу, соосные друг с другом; и
диодный мост;
причем первый электромагнит электрически соединен с диодным мостом, причем диодный мост сконфигурирован для соединения с источником электрического тока, являющимся внешним по отношению к электромагнитной расстановке, причем диодный мост сконфигурирован для подачи электрического тока постоянной полярности для, по меньшей мере, первого электромагнита, вне зависимости от полярности источника электрического тока,
причем второй электромагнит сконфигурирован для непосредственного соединения с источником электрического тока, так чтобы полярность электрического тока, поступающего на второй электромагнит, была идентична полярности источника электрического тока; и
причем электромагнитная расстановка генеририрует (i) первый спектр магнитного поля при подаче электрического тока, имеющего первую полярность, и (ii) второй спектр магнитного поля при подаче электрического тока, имеющего вторую противоположную полярность, причем первый спектр магнитного поля сформирован из множества магнитных диполей, все из которых сориентированы в одном и том же самом направлении, а второй спектр магнитного поля сформирован из, по меньшей мере, первого и второго магнитных диполей, сориентированных в противоположных направлениях.
2. Электромагнитная расстановка по п. 1, содержащая первый, второй и третий электромагниты.
3. Электромагнитная расстановка по п. 1, в которой немагнитный корпус содержит, по меньшей мере, один центратор, предназначенный для центрирования корпуса в подземной буровой скважине.
4. Электромагнитная расстановка по п. 1, в которой каждый из электромагнитов содержит магнитно-проницаемый сердечник, имеющий длину в интервале значений от примерно 4 до примерно 16 футов (1,22-4,89 м), с обмоткой от примерно 2000 до примерно 16000 витков электрического проводника.
5. Электромагнитная расстановка по п. 1, в которой первый и второй электромагниты электрически соединены последовательно.
6. Сборный тросовый скважинный инструмент, имеющий конфигурацию, предназначенную для использования в подземной буровой скважине, который содержит:
по существу, цилиндрический немагнитный корпус, выполненный с возможностью размещения в подземной буровой скважине;
по меньшей мере, первый и второй электромагниты, размещенные в корпусе, разнесенные по оси и, по существу, соосные друг с другом;
отрезок одножильного кабеля, выполненный с возможностью обеспечения электрического соединения между размещенным на поверхности источником питания и электромагнитами; и
диодный мост, электрически подключенный к отрезку одножильного кабеля и расположенный между отрезком одножильного кабеля и, по меньшей мере, первым электромагнитом, причем диодный мост сконфигурирован для подачи электрического тока постоянной полярности на, по меньшей мере, первый электромагнит, независимо от обеспечиваемой источником питания полярности источника питания,
причем второй электромагнит сконфигурирован для непосредственного соединения с отрезком одножильного кабеля, так чтобы полярность электрического тока, поступающего на второй электромагнит, была идентична полярности источника электрического тока; и
причем электромагнитная расстановка имеет конфигурацию, позволяющую генерировать (i) первый спектр магнитного поля при подаче электрического тока, имеющего первую полярность, и (ii) второй спектр магнитного поля при подаче электрического тока, имеющего вторую противоположную полярность, причем первый спектр магнитного поля сформирован из множества магнитных диполей, все из которых сориентированы в том же самом направлении, а второй спектр магнитного поля сформирован из, по меньшей мере, первого и второго магнитных диполей, сориентированных в противоположных направлениях.
7. Электромагнитная расстановка по п. 6, в которой каждый из электромагнитов содержит магнитно-проницаемый сердечник с длиной в интервале значений от примерно 4 до примерно 16 футов (1,22-4,89 м), имеющий обмотку от примерно 2000 до примерно 16000 витков электрического проводника.
8. Электромагнитная расстановка по п. 6, в которой первый и второй электромагниты электрически соединены последовательно.
9. Способ выполнения измерений для буровой скважины относительно целевой скважины, включающий следующие этапы:
(a) размещение в целевой скважине электромагнитной расстановки, содержащей по меньшей мере первый и второй разнесенные по оси электромагниты, причем первый электромагнит соединен с источником электрического тока через диодный мост, сконфигурированный для подачи электрического тока постоянной полярности для первого электромагнита, вне зависимости от полярности источника электрического тока, причем второй электромагнит непосредственно соединен с источником электрического тока, так чтобы полярность электрического тока, поступающего на второй электромагнит, была идентична полярности источника электрического тока; причем электромагнитная расстановка сконфигурирована для генерирования (i) магнитного поля, имеющего первый спектр при подаче электрического тока первой полярности, и (ii) магнитного поля, имеющего отличный второй спектр при подаче электрического тока второй противоположной полярности;
(b) побуждение источника тока на возбуждение электромагнитной расстановки электрическим током, имеющим первую полярность с возможностью создания магнитного поля, имеющего первый спектр вокруг целевой скважины, причем первый спектр сформирован из множества магнитных диполей, все из которых сориентированы в одном и том же направлении;
(c) проведение измерения первого вектора магнитного поля датчиком магнитного поля, размещенным в буровой скважине;
(d) побуждение источника тока на возбуждение электромагнитной расстановки электрическим током второй полярности с возможностью создания магнитного поля, имеющего второй спектр вокруг целевой скважины, причем второй спектр магнитного поля сформирован из, по меньшей мере, первого и второго магнитных диполей, сориентированных в противоположных направлениях;
(e) проведение измерения второго вектора магнитного поля датчиком магнитного поля, размещенным в буровой скважине; и
(f) обработку первого и второго векторов магнитного поля, измеренных на стадиях (с) и (е), для определения, по меньшей мере, расстояния между датчиком магнитного поля и электромагнитной расстановкой.
10. Способ по п. 9, в котором этап (f) дополнительно включает обработку первого и второго векторов магнитного поля в комбинации с соответствующими первой и второй математическими моделями, связывающими векторы магнитного поля, по меньшей мере, с расстоянием между датчиком магнитного поля и электромагнитной расстановкой.
11. Способ проведения измерений для буровой скважины относительно целевой скважины, по существу, в режиме реального времени в процессе бурения скважины, включающий этапы:
(а) размещение в целевой скважине электромагнитной расстановки, содержащей по меньшей мере первый и второй электромагниты, разнесенные по оси, причем первый электромагнит соединен с источником электрического тока через диодный мост, сконфигурированный для подачи электрического тока постоянной полярности для, по меньшей мере, первого электромагнита, вне зависимости от полярности источника электрического тока, причем второй электромагнит непосредственно соединен с источником электрического тока, так чтобы полярность электрического тока, поступающего на второй электромагнит, была идентична полярности источника электрического тока; причем электромагнитная расстановка сконфигурирована для генерирования (i) магнитного поля, имеющего первый спектр при подаче электрического тока первой полярности, и (ii) магнитного поля, имеющего отличный второй спектр при подаче электрического тока второй противоположной полярности;
(b) побуждение источника тока на возбуждение электромагнитной расстановки электрическим током первой полярности с возможностью создания магнитного поля, имеющего первый спектр вокруг целевой скважины, причем первый спектр сформирован из множества магнитных диполей, все из которых сориентированы в одном и том же направлении;
(c) побуждение на проведение измерения осевого компонента первого вектора магнитного поля датчиком магнитного поля, размещенным в буровой скважине, во время бурения буровой скважины;
(d) побуждение источника тока на возбуждение электромагнитной расстановки электрическим током второй полярности для формирования магнитного поля, имеющего второй спектр вокруг целевой скважины, причем второй спектр магнитного поля сформирован из, по меньшей мере, первого и второго магнитных диполей, сориентированных в противоположных направлениях;
(e) побуждение на проведение измерения осевого компонента второго вектора магнитного поля датчиком магнитного поля, размещенным в буровой скважине, во время бурения; и
(f) обработку осевых компонентов первого и второго векторов магнитного поля, измеренных на стадиях (с) и (е), для определения по меньшей мере расстояния между датчиком магнитного поля и электромагнитной расстановкой по существу в реальном масштабе времени в процессе бурения.
12. Способ по п. 11, в котором стадия (f) дополнительно включает обработку первого и второго векторов магнитного поля в комбинации с соответствующими первой и второй математическими моделями, связывающими векторы магнитного поля по меньшей мере с расстоянием между датчиком магнитного поля и электромагнитной расстановкой.
| US 20090308657 A1, 17.12.2009 | |||
| US 3727126 A, 10.04.1973 | |||
| Каротажный микрозонд | 1986 |
|
SU1377801A1 |
| US 4716960 A, 05.01.1988 | |||
| Способ определения дефектов в колонне обсадных труб и устройство для его осуществления | 1980 |
|
SU1376950A3 |
| Колосоуборка | 1923 |
|
SU2009A1 |

