УРОВЕНЬ ТЕХНИКИ
Данное раскрытие изобретения относится в основном к разведке нефтяных месторождений, в частности к дальномерной системе позиционирования и методике с применением магнитных монополей.
В традиционных индукционных приборах, применяемых в разведке нефтяных месторождений, рамочные антенны применяются для передачи и приема электромагнитных сигналов. Как правило, такие рамочные антенны включают магнитные диполи. Каждый из типов антенн может излучать электромагнитное поле со своей диаграммой направленности. Диаграммы направленности могут ограничить эффективность действия инструментов определенными скважинными применениями в определенных типах пластов.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Некоторые конкретные типовые варианты реализации изобретения можно понять при помощи ссылки, в частности на нижеследующее описание и прилагаемые графические материалы.
Фиг. 1 представляет собой схему, которая иллюстрирует приведенную в качестве примера буровую систему, в соответствии с аспектами данного раскрытия изобретения.
Фиг. 3 представляет собой схему, которая иллюстрирует приведенную в качестве примера каротажную систему с применением магнитного диполя, в соответствии с аспектами данного раскрытия изобретения.
Фиг. 3А-B представляют собой схемы, иллюстрирующие разницу между элементом магнитного монополя и элементом магнитного диполя, в соответствии с аспектами данного раскрытия изобретения.
Фиг. 4А-С представляют собой графики, иллюстрирующие направление магнитного поля и изолиний напряженности поля для элементарного магнитного диполя, ориентированного в направлении z.
Фиг. 5А-C представляют собой графики, которые иллюстрируют направление магнитного поля и изолинии напряженности поля для магнитного диполя с конечной длиной.
Фиг. 6А-C представляют собой графики, которые иллюстрируют направление магнитного поля и изолинии напряженности поля для магнитного монополя, в соответствии с аспектами данного раскрытия изобретения.
Фиг. 7 представляет собой схему, которая иллюстрирует два изолированных магнитных полюса, в соответствии с аспектами данного раскрытия изобретения.
Фиг. 8А-B представляют собой графики, которые иллюстрируют напряжение и амплитудно-частотные характеристики, вызванные антенной магнитного монополя по сравнению с антенной магнитного диполя, в соответствии с аспектами данного раскрытия изобретения.
Фиг. 9 представляет собой схему, которая иллюстрирует магнитное поле монополя, измеряемое с помощью двухосного приемника, в соответствии с аспектами данного раскрытия изобретения.
Фиг. 10 представляет собой схему, которая иллюстрирует приведенную в качестве примера систему позиционирования, в соответствии с аспектами данного раскрытия изобретения.
Фиг. 11А-F представляют собой графики, которые иллюстрируют результаты приведенного в качестве примера моделирования позиционирования с применением синтезированных данных, в соответствии с аспектами данного раскрытия изобретения.
Фиг. 12 представляет собой схему, которая иллюстрирует приведенные в качестве примера приемники R1 и R2 для производной операции, в соответствии с аспектами данного раскрытия изобретения.
Фиг. 13А-F представляют собой графики, которые иллюстрируют результаты приведенного в качестве примера дальномерного моделирования с применением синтезированных данных, в соответствии с аспектами данного раскрытия изобретения.
Фиг. 14 представляет собой схему приведенной в качестве примера буровой системы с применением магнитных монополей, в соответствии с аспектами данного раскрытия изобретения.
Фиг. 15 представляет собой схему приведенной в качестве примера буровой системы с применением магнитных монополей, в соответствии с аспектами данного раскрытия изобретения.
Хотя проиллюстрированы и описаны варианты реализации данного изобретения, а также определены посредством ссылки на приведенные в качестве примера варианты реализации данного изобретения, такие ссылки не подразумевают ограничение на раскрытие данного изобретения, и не предполагается никаких подобных ограничений. Раскрытый объект изобретения может иметь значительные модификации, изменения и эквиваленты по форме и функции, что будет понятно специалистам в соответствующей области техники, извлекающим пользу из раскрытия данного изобретения. Проиллюстрированные и описанные варианты реализации данного изобретения приведены лишь в качестве примеров и не являются исчерпывающими в отношении объема изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В контексте данного раскрытия изобретения система обработки информации может содержать любые устройства или совокупность устройств, выполненные с возможностью вычисления, классификации, обработки, передачи, получения, извлечения, происхождения, переключения, хранения, отображения, проявления, обнаружения, фиксирования, воспроизведения, обработки или использования любой формы информации, развитых логических функций или данных для целей бизнеса, науки, управления или других целей. Например, система обработки информации может представлять собой персональный компьютер, сетевое устройство хранения данных или любое другое пригодное устройство и может варьировать по размеру, форме, производительности, функциональности и цене. Система обработки информации может содержать оперативное запоминающее устройство (ОЗУ), один или более ресурсов для обработки информации, таких как центральный процессор (ЦП) или аппаратное или программное логическое средство управления, ПЗУ и/или другие типы энергонезависимого запоминающего устройства. Дополнительные компоненты системы обработки информации могут включать один или более дисковых накопителей, один или более сетевых портов для связи с внешними устройствами, а также различные устройства ввода/вывода, такие как клавиатура, мышь и графический дисплей. Система обработки информации может также содержать одну или более шин, выполненных с возможностью передачи сообщений между различными аппаратными компонентами. Она может также содержать один или более интерфейсных компонентов, выполненных с возможностью передачи одного или более сигналов контроллеру, приводу или подобному устройству.
В контексте данного раскрытия изобретения машиночитаемый носитель может включать любые устройства или совокупность устройств, которые могут хранить данные и/или команды в течение определенного периода времени. Машиночитаемый носитель может включать, например, без ограничения, запоминающий носитель, такой как запоминающее устройство с прямым доступом (например, накопитель на жестких дисках или запоминающее устройство на гибких дисках), запоминающее устройство с последовательным доступом (например, запоминающее устройство на магнитной ленте), компакт-диск, CD-ROM, DVD, ОЗУ, ПЗУ, электрически стираемое программируемое постоянное запоминающее устройство (EEPROM) и/или флэш-память; а также средства связи, такие как провода, оптические волокна, микроволны, радиоволны и другие электромагнитные и/или оптические носители; и/или любая комбинация вышеуказанного.
В данном документе будут более подробно описаны приведенные в качестве примера варианты реализации данного изобретения. В целях ясности не все особенности фактической реализации данного изобретения могут быть изложены в этом описании. Конечно, следует иметь в виду, что в разработке любого такого фактического варианта реализации изобретения должны быть приняты многочисленные специфичные для реализации изобретения решения с целью достижения конкретных целей реализации, которые будут изменяться от одной реализации изобретения к другой. Кроме того, следует иметь в виду, что такая работа по разработке может быть сложным и трудоемким процессом, тем не менее она будет рутинным мероприятием для специалистов в данной области техники, извлекающих пользу из ознакомления с данным раскрытием изобретения.
Для содействия лучшему пониманию данного раскрытия изобретения приведены следующие примеры некоторых вариантов реализации изобретения. Следующие примеры ни в коем случае не стоит рассматривать как ограничивающие или определяющие объем данного изобретения. Варианты реализации изобретения согласно настоящему раскрытию могут быть применимы к скважине, следующей за целевой (например, к соседней скважине), скважине, пересекающей целевую, размещающей целевую скважине, находящейся в паре скважине, такой как в скважинных структурах с применением ПГД (парогравитационный дренаж), разгрузочным скважинам для изливающихся скважин, пересечениям рек, строительному туннелированию, горизонтальным, вертикальным, наклонно-направленным, многоствольным скважинам, U-трубному соединению, пересечению, обходу (долото в месте срединного прихвата ловить и запускать обратно в скважину ниже), или иным нелинейным стволам скважин в любом типе подземного пласта. Варианты реализации изобретения могут быть применимы к нагнетательным скважинам и добывающим скважинам, в том числе к добывающим скважинам, содержащим природные ресурсы, такие как сероводород, углеводороды, или геотермальным скважинам, а также скважинного строительства для пересекающего реки туннелирования и других подобных туннельных скважин для целей приповерхностного строительства или трубопроводов, проложенных в U-трубных стволах скважин, используемых для транспортировки флюидов, таких как углеводороды. Варианты реализации изобретения, описанные дальше по отношению к одному варианту реализации, не являются ограничивающими.
Термины «соединяются» или «соединяется», используемые в настоящем документе, предназначены для обозначения либо косвенного, либо прямого соединения. Таким образом, если первое устройство соединяется со вторым устройством, это соединение может выполняться посредством прямого соединения или посредством непрямого механического или электрического соединения через другие устройства и соединения. Аналогичным образом термин «коммуникативно соединенный», используемый в настоящем документе, предназначен для обозначения либо прямого, либо непрямого коммуникационного соединения. Такое соединение может представлять собой проводное или беспроводное соединение, такое как, например, Ethernet или локальная сеть (LAN). Такие проводные и беспроводные соединения хорошо известны специалистам в данной области техники и поэтому не будут обсуждаться подробно в данном документе. Таким образом, если первое устройство коммуникативно соединено со вторым устройством, то это соединение может осуществляться посредством прямого соединения или посредством непрямого соединения через другие устройства и соединения.
Современные операции бурения нефтяных скважин и добычи с них требуют информации, относящейся к параметрам и условиям внутри скважин. Существует несколько способов сбора информации внутри скважин, в том числе каротаж в процессе бурения («КВБ») и измерения в процессе бурения («ИВБ»). В случае КВБ данные обычно собираются в процессе бурения, что позволяет избежать необходимости извлечения буровой компоновки для введения в скважину каротажного инструмента. Следовательно, КВБ позволяет бурильщику производить точные модификации в режиме реального времени или исправления с целью оптимизации производительности при сведении к минимуму времени простоя. ИВБ представляют собой термин для условий измерения внутри скважин, относящийся к перемещению и расположению буровой компоновки, в то время как бурение продолжается. КВБ в большей степени ориентирован на измерение характеристик пласта. В то время как между ИВБ и КВБ могут существовать различия, термины ИВБ и КВБ часто используются как взаимозаменяемые. В контексте данного раскрытия изобретения термин КВБ будет использоваться с пониманием того, что этот термин охватывает и сбор характеристик пласта, и сбор информации, относящейся к перемещению и расположению буровой компоновки.
Фиг. 1 представляет собой схему, которая иллюстрирует приведенную в качестве примера буровую систему 100, в соответствии с аспектами данного раскрытия изобретения. Буровая система 100 содержит буровую установку 101 на поверхности 111 и расположена над скважиной 103 в подземном пласте 102, который содержит множество слоев пласта 102а-с. Слои пласта 102а-с могут содержать разные типы пород, имеющие различные характеристики (например, пористость, удельное электрическое сопротивление, проницаемость и т.д.), разделенные границами. Определенные из слоев пласта 102а-с могут содержать углеводороды, и буровая система 100 может удлинять скважину 103 до тех пор, пока не достигнет этих слоев пласта.
Буровая система 100 может содержать буровую компоновку 104, соединенную с буровой установкой 101. Буровая компоновка 104 может содержать бурильную колонну 105 и компоновку низа бурильной колонны (КНБК) 106. Бурильная колонна 105 может содержать несколько сегментов трубы, которые соединены с помощью резьбы. В проиллюстрированном варианте реализации изобретения бурильная колонна 105 расположена в скважинной обсадной колонне или хвостовике 112. Обсадная колонна 112 может содержать систему металлических труб, закрепленных внутри скважины 103, например с помощью цемента, и может функционировать для того, чтобы предотвратить обрушение скважины 103 в процессе бурения.
КНБК 106 может представлять собой буровое долото 109, направляющую компоновку 108, устройства КВБ/ИВБ 107 и систему телеметрии 114. Направляющая компоновка 108 может контролировать направление, в котором расположено буровое долото 109, и, следовательно, направление, в котором посредством бурового долота 109 будет расширяться скважина 103. Система телеметрии 114 может обеспечивать связь между КНБК 106 и блоком управления 110, расположенным на поверхности 111. Блок управления 110 может содержать систему обработки информации с процессором и запоминающим устройством и может генерировать команды и получать информацию от элементов КНБК 106. Кроме того, по меньшей мере один процессор может находиться внутри компоновки низа бурильной колонны 106 для получения команд от поверхностного блока 110, для создания связи с поверхностным блоком 110 или для управления иным образом работой элементов КНБК 106.
Устройство КВБ/ИВБ 107 может содержать один или более передатчиков 116 и приемников 118, которые могут быть использованы для проведения измерений окружающего пласта 102 и толщи пластов 102а-с с целью характеристики пласта. Передатчики 116 и приемники 118 могут включать многочисленные типы передатчиков и приемников, в том числе рамочную антенну, электроды, датчики на основе эффекта Холла и т.д. В некоторых вариантах реализации изобретения передатчики 116 и приемники 118 могут быть объединены в преобразователи, включенные в устройство КВБ/ИВБ 107. Передатчики 116 и приемники 118 могут генерировать сигналы при поступлении команды от блока управления 110 или процессора внутри КНБК 106 или устройства КВБ/ИВБ 107. Измерения, произведенные с помощью передатчиков 116 и приемников 116, могут либо сохраняться в устройстве КВБ/ИВБ 107 для последующей доставки на поверхность, либо передаваться в блок управления 110 посредством системы телеметрии 114.
В соответствии с аспектами данного раскрытия изобретения, по меньшей мере один из передатчиков 116 и приемников 118 могут содержать магнитный монополь. В контексте данного документа и как будет описано дальше, передатчик или приемник магнитного монополя может включать тип передатчика или приемника магнитного диполя, в котором полюса разделены таким образом, что эффекты магнитного соединения между полюсами магнитных полей в непосредственной близости к полюсам, по существу, снижены или устранены. В случае, когда эффекты магнитного соединения, по существу, снижены или устранены, диаграмма направленности магнитных полей от каждого полюса или к нему может быть, по существу, радиальной, тем самым указывая направление к соответствующему полюсу или от него. Радиальное направление можно выгодно поддерживать даже при наличии слоистых пластов, таких как пласт 102. Дополнительно, как будет описано дальше, поскольку электромагнитные поля, излучаемые магнитным монополем, распространяются от монополя в радиальном направлении, они могут быть пригодны для типа систем позиционирования и дальнометрии, с использованием вычислительно упрощенных вычислений, которые используются в других применениях позиционирования и дальнометрии.
На Фиг. 1 передатчик 116 содержит магнитный монополь, а стрелки, отходящие от передатчика 116, иллюстрируют участок электромагнитного поля, распространяющегося от передатчика 116. Как видно, электромагнитное поле распространяется в радиальном направлении наружу от передатчика 116 в окружающий пласт. При условии, что в пределах окружающего пласта есть магнитные элементы, электромагнитное поле, генерируемое передатчиком 116, может генерировать магнитное поле в магнитных элементах, которое может быть измерено приемником 118. Затем измерения могут быть обработаны и использованы в буровых работах. Например, измерения, произведенные с применением магнитного монополя, могут быть использованы в связи с направляющей компоновкой 108 для определения местонахождения целевой буровой скважины (не проиллюстрирована) и содействовать тому, чтобы скважина 103 обходила, пересекала целевую скважину или следовала за ней. Возможны и другие применения, как будет описано дальше.
Фиг. 2 представляет собой схему приведенной в качестве примера измерительной/каротажной системы 200, в соответствии с аспектами данного раскрытия изобретения. Система 200 может использоваться в сочетании с передатчиками и/или приемниками магнитного монополя и может быть включена, например, в устройство КВБ/ИВБ или кабельный каротажный инструмент. Система 200 может содержать центр управления системы 220, коммуникативно соединенный с блоком связи 230. В некоторых вариантах реализации изобретения центр управления системы может включать систему обработки информации, расположенную на поверхности проведения буровых работ, а блок связи 230 может располагаться в глубине скважины. Блок связи 230 может также включать систему обработки информации и может содержать части скважинной системы телеметрии и устройства КВБ/ИВБ или устройства управления внутри скважинного тросового инструмента.
В некоторых вариантах реализации изобретения по меньшей мере один передатчик 210 и по меньшей мере один приемник 240 может быть коммуникативно соединен с блоком связи 203. По меньшей мере один из передатчика 210 и приемника 240 может включать магнитный монополь. Другой из передатчика 210 и приемника 240, который не является магнитным монополем, может включать гальванический источник или диполь, в том числе магнитный диполь или электрический диполь. В контексте данного документа гальванический источник может включать источник электрической энергии постоянного тока. В некоторых вариантах реализации изобретения в системе 200 могут быть использованы различные величины и типы передатчиков и приемников, некоторые или все из которых работают на различных частотах. Например, в некоторых вариантах реализации изобретения приемник магнитного диполя 240 может быть использован для получения сигнала, передаваемого передатчиком магнитного монополя 210. Кроме того, в то время как система 200 содержит как приемник 240, так и передатчик 210, другие системы могут содержать только приемники или только передатчики.
Центр управления системы 220 может выдавать команды передатчику 210 и/или приемнику 240 посредством блока связи 230, которые приводят к выполнению передатчиком 210 и/или приемником 240 определенных действий. Например, передатчик 210 может передавать электромагнитный сигнал, когда команда "передачи" поступает из центра управления системы 220 через блок связи 230. Электромагнитный сигнал может проходить через окружающие пласты, а также через скважину и скважинный прибор, и его часть может быть измерена или получена приемником 240. Поскольку передаваемый электромагнитный сигнал взаимодействует с пластом и скважиной при прохождении через них, он содержит информацию о характеристиках пласта и скважины.
Полученный электромагнитный сигнал может быть отправлен из приемника 240 центру управления системы 220 через блок связи 230. Когда электромагнитный сигнал поступает в центр управления системы 220, он может передаваться или обрабатываться посредством блока сбора данных 250 и блока обработки данных 260, коммуникативно соединенного с блоком управления системы 220. Например, блок обработки данных 260 может осуществлять инвертирование электромагнитного сигнала, полученного приемником 240, для вычисления характеристик пласта и скважины. В некоторых вариантах реализации изобретения блок визуального отображения (не проиллюстрирован) может быть соединен с блоком связи 230 или центром управления системы 220 для контроля и вмешательства в буровые работы, например, с целью прекращения процесса бурения, изменения скорости бурения, изменения направления бурения и т.д.
В некоторых вариантах реализации изобретения некоторые или все из центра управления системы 220, блока связи 230, приемника 240 и передатчика 210 могут находиться в разных физических местоположениях. Например, в некоторых применениях один или более передатчиков магнитного монополя 210 могут быть расположены на уровне поверхности, по меньшей мере один приемник 240 может быть расположен в глубине скважины в устройстве ИВБ/КВБ, а блок связи 230 может быть расположен где-то между передатчиками 210 и приемниками 240, например, на поверхности над скважиной, вблизи передатчиков 210 или вблизи приемников 240. В контексте данного документа уровень поверхности может включать зоны, которые расположены на верхней поверхности пласта, над ней или каким-либо образом в ее непосредственной близости. В другом варианте реализации изобретения один или более передатчиков 210 могут быть расположены в первом стволе скважины или скважине, один или более приемников 240 могут быть расположены в другом стволе скважины или скважине, а блок связи 230 может быть расположен на уровне поверхности, где-то между двумя стволами скважин или скважинами. Кроме того, в некоторых вариантах реализации изобретения измерительные или каротажные системы могут содержать только передатчики или приемники.
Фиг. 3А и 3B представляют собой схемы, иллюстрирующие разницу между элементом магнитного монополя 350 в соответствии с аспектами данного раскрытия изобретения и существующим элементом магнитного диполя 300. Элемент магнитного диполя 300 включает рамочную антенну 310, которая проводит ток в направлении против часовой стрелки, образуя эквивалентное направление магнитного диполя, проиллюстрированное стрелкой 340. Элемент магнитного диполя 300 может рассматриваться как отрицательный (или южный) полюс 320 и положительный (или северный) полюс 330, расположенные в непосредственной близости друг к другу. Как видно, элемент магнитного монополя 350 включает вытянутую рамочную антенну 360 с большим количеством обмоток, которая также проводит изменяющийся по времени ток для образования отрицательных и положительных полюсов 370 и 380. Однако, в отличие от полюсов 320 и 330, полюса 370 и 380 вытянутой антенны 360 могут быть разделены посредством расстояния таким образом, что воздействия магнитного соединения между полюсами 370 и 380 на магнитные поля в областях пространства вблизи полюсов 370 или 380 могут быть, по существу, снижены или устранены. Как будет обсуждаться дальше со ссылкой на Фиг. 4-6, разделение между полюсами должно по меньшей мере в несколько раз превышать диапазон использования магнитного монополя.
Элемент магнитного монополя 350 может считаться монополем изменяющегося тока по причине использования изменяющегося по времени тока для образования полюсов 370 и 380 в рамочной антенне 360. Монополи изменяющегося тока могут быть образованы с помощью рамочных антенн с обмотками различной формы, такими как прямоугольные рамочные обмотки, при условии, что данная форма не замыкается сама на себя. Также возможны монополи постоянного тока, и они могут быть сформированы с использованием удлиненного магнита или путем намагничивания удлиненного элемента, такого как обсадная колонна.
Как описано выше, магнитные монополи могут генерировать или получать электромагнитные сигналы, по существу, по радиальной схеме, которая, как правило, не подвержена воздействиям магнитного соединения с соответствующим, противоположным полюсом. Хотя магнитное соединение между полюсами магнитного монополя могут по-прежнему существовать, расстояние между полюсами может делать изогнутость ничтожно малой по отношению к цели в пласте вблизи магнитного монополя. Магнитные диполи, напротив, генерируют или получают электромагнитные сигналы по схеме, которая изогнута по отношению к соответствующему, противоположному полюсу из-за близости полюсов. Для иллюстрирования различий Фиг. 4-5 представляют собой схемы, иллюстрирующие схемы направленности конфигураций магнитного диполя, в то время как Фиг. 6 включает схемы, иллюстрирующие диаграммы направленности, приведенной в качестве примера конфигурации антенны магнитного монополя.
В частности, Фиг. 4А-С иллюстрируют направление магнитного поля и изолинии напряженности поля для элементарного магнитного диполя, ориентированного в направлении z. На Фиг. 4А направление магнитного поля для мнимой части магнитного поля проиллюстрировано на координатной сетке в плоскости x-z в однородном пласте с удельной проводимостью σ = 0,05 с/м для магнитного диполя. Магнитный диполь ориентирован в направлении z в декартовой системе координат, а частота составляет 10 кГц. Относительная магнитная проницаемость и проницаемость пласта выбирается так, чтобы равняться единице. Как видно, магнитное поле образует замкнутый контур, начинаясь от положительного полюса и заканчиваясь в отрицательном полюсе (полюса проиллюстрированы в виде кругов в центре схемы), при этом линии излучения имеют изогнутость, соответствующую расстоянию между данными полюсами.
Следует отменить, что Фиг. 4А не представляет собой изображение истинного вектора поля, потому что содержит информацию о направлении, но не содержит информацию о напряженности поля. Это было сделано для того, чтобы лучше проиллюстрировать направление магнитного поля в тех местах, где напряженность поля низка. Кроме того, поскольку вещественная часть магнитного поля имеет очень низкую амплитуду при низких частотах, мнимая часть графически представлена на этих фигурах, чтобы проиллюстрировать направление магнитного поля. Фиг. 4B и 4C иллюстрируют контурные изображения нормализованной напряженности составляющих х и z поля Н относительно местоположения, соответственно. Как видно, напряженность магнитного поля ослабляется по мере удаления от передатчика.
Фиг. 5А-С иллюстрируют направление магнитного поля и изолиний напряженности поля для магнитного диполя с конечной длиной, соответствующего рамочной антенне с конечной толщиной проволоки и множеством обмоток витков. В контексте данного иллюстрирования предполагают, что разделение между двумя концами рамочной антенны (и, следовательно, двумя полюсами диполя) равно L = 5 см. Частота работы составляет еще 10 кГц, а характеристики пласта такие же, как на Фиг 4А-С. Эта конфигурация может быть смоделирована путем интегрирования полей, производимых магнитными диполями по всей протяженности инструмента.
Фиг. 5А иллюстрирует направление магнитного поля для этого случая. Примечательно, что, хотя в этих графических отображениях можно видеть некоторое разделение между полями полюсов и поля становятся более радиальными в непосредственной близости к полюсам, полюса все же не изолированы и магнитные поля демонстрируют соединяющие воздействия со стороны полюсов в виде изогнутости. Фиг. 5B и 5С иллюстрируют соответствующие контурные графические отображения составляющих нормализованного поля в направлениях х и z, соответственно. Как видно, напряженность магнитного поля ослабляется по мере удаления от передатчика.
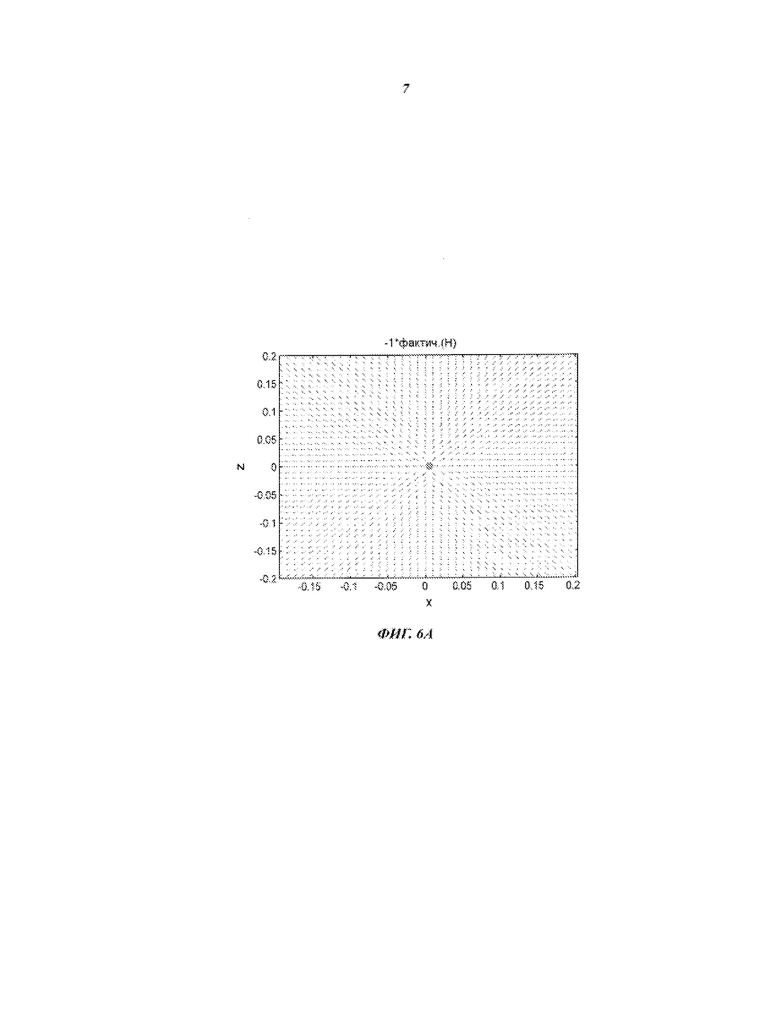
Фиг. 6А-C иллюстрируют направление магнитного поля и изолинии напряженности поля для магнитного монополя, в соответствии с аспектами данного раскрытия изобретения. В проиллюстрированном варианте реализации изобретения передатчик и приемник находятся друг от друга на расстоянии L = 10 м. Направление магнитного поля вблизи положительного полюса проиллюстрировано на Фиг. 6А, и его можно рассматривать как почти полностью радиальное в направлении от полюса с очень слабым соединением между обоими полюсами. Таким образом, магнитные поля в этой области, в сущности, являются полем магнитного монополя. Фиг. 6B и 6C иллюстрируют изолинии для нормализованной напряженности магнитного диполя в направлениях х и z, а также иллюстрируют, что соединение между положительным и отрицательным полюсами почти полностью убрано.
Фиг. 6А-C иллюстрируют, что поля, излучаемые инструментом монополя, простираются в радиальном направлении путем применения эмпирического подхода, при котором одним из полюсов магнитного диполя изолируется с помощью объединения элементарных магнитных диполей на большом расстоянии. В качестве альтернативы, посредством двойственности магнитного монополя с электрическим зарядом, поля благодаря изолированному магнитному полюсу могут быть выражены непосредственно формулой
 УРАВНЕНИЕ 1
УРАВНЕНИЕ 1
где  представляет собой вектор положения с гипотетическим магнитным зарядом
представляет собой вектор положения с гипотетическим магнитным зарядом  , который, как полагают, находится в начале координат;
, который, как полагают, находится в начале координат;  представляет собой вектор напряженности магнитного поля; и µ представляет собой магнитную проницаемость среды. Магнитостатические условия предполагаются в письменной форме в виде уравнения 1. В электродинамической конструкции магнитного монополя предположение в уравнении 1 может рассматриваться как амплитуда фазового вектора магнитного поля, за исключением того, что вычисления расстояния будут действительны только при условии, что частота является достаточно низкой для аппроксимации ближнего поля.
представляет собой вектор напряженности магнитного поля; и µ представляет собой магнитную проницаемость среды. Магнитостатические условия предполагаются в письменной форме в виде уравнения 1. В электродинамической конструкции магнитного монополя предположение в уравнении 1 может рассматриваться как амплитуда фазового вектора магнитного поля, за исключением того, что вычисления расстояния будут действительны только при условии, что частота является достаточно низкой для аппроксимации ближнего поля.
На основании известных полей отдельного магнитного монополя (например, полей, описанных с помощью уравнения 1), поля из-за произвольного распределения магнитных монополей могут быть определены, например, посредством принципа суперпозиции. В качестве примера Фиг. 7 иллюстрирует магнитный диполь, смоделированный в виде системы двух изолированных магнитных полюсов. С помощью производных, выполненных для электрического диполя в сочетании с принципом двойственности, магнитные поля магнитного диполя, проиллюстрированные на Фиг. 7, могут быть выражены в письменной форме формулой

УРАВНЕНИЕ 2
Уравнение 2 может быть переписано как уравнение 3 (внизу), когда точка наблюдения находится гораздо дальше, чем расстояние между полюсами.

УРАВНЕНИЕ 3
Как проиллюстрировано в уравнении 3, напряженность полей увеличивается пропорционально расстоянию между полюсами. Таким образом, расстояние между полюсами магнитного диполя относительно образования магнитного монополя не только определяет, насколько близко он уподобляется фактическому магнитному монополю, но и влияет на напряженность излучаемых полей. Для скважинных применений, когда направленность и напряженность поля играют важную роль ввиду размера областей, подлежащих измерению, магнитный монополь с высокой напряженностью поля и направленностью могут быть образован путем размещения одного конца обмотки рамочной антенны на уровне поверхности, а другого конца - внутри скважины.
Фиг. 8А-B иллюстрируют напряжение и амплитудно-частотные характеристики, вызванные антенной магнитного монополя, по сравнению с антенной магнитного диполя, в соответствии с аспектами данного раскрытия изобретения. В частности, Фиг. 8А иллюстрирует абсолютное значение индуцированного напряжения на рамочной антенне приемника в 3 м (10 футах) от магнитного монополя, содержащего два z-ориентированных полюса, разделенные расстоянием L = 10 м, и от магнитного диполя с конечной физической длиной 5 см и радиусом 6,033 см (2,375 дюйма). Индуцированное напряжение от монополя проиллюстрировано в виде пунктирной линии, а индуцированное напряжение от магнитного диполя проиллюстрировано в виде сплошной линии. Фиг. 8В иллюстрирует фазовые углы индуцированных напряжений на рамочных антеннах с помощью тех же индикаторов пунктирной и сплошной линий. Как видно, монополь может индуцировать большее напряжение на приемник рамочной антенны за счет более высокой напряженности поля монополя, однако амплитудно-частотные характеристики приемника в ответ на антенны магнитного монополя и магнитного диполя аналогичны.
В соответствии с аспектами данного раскрытия изобретения, передатчики и приемники магнитного монополя могут быть расположены и использоваться в различных типах инструментов и конфигураций для выполнения различных типов измерений и операций, относящихся к работам по добыче углеводородов. Одна приведенная в качестве примера операция представляет собой определение местоположения скважинного объекта посредством радиального магнитного поля магнитного монополя для определения относительного вектора положения между передатчиком и приемником. В некоторых вариантах реализации изобретения местоположение может включать абсолютное местоположение скважинного объекта, такого как КНБК или буровое долото либо местоположение по отношению к поверхности. В некоторых вариантах реализации изобретения местоположение может включать относительное местоположение скважинного объекта, такого как КНБК, буровое долото, обсадные трубы и т.д. по отношению к другому скважинному элементу.
В одном варианте реализации изобретения один или более передатчиков монополя могут располагаться на уровне поверхности буровой площадки в известных местоположениях. В контексте данного документа передатчик монополя, расположенный на уровне поверхности, может включать передатчики монополя, закрепленные на стойках над поверхностью, уложенные на поверхности или залегающие вблизи поверхности. В дополнение к одному или более передатчиков монополя, размещенных на поверхности, по меньшей мере один приемник может быть расположен внутри скважины для измерения и расчета вектора относительного положения между одним или более передатчиков поверхностного монополя и скважинным приемником. В некоторых вариантах реализации изобретения приемник может быть соединен со скважинным элементом, таким как устройство КВБ/ИВБ или тросовый инструмент. Поскольку местоположение передатчиков на уровне поверхности известно, местоположение приемника может быть определено с помощью измеренных относительных векторов между передатчиками и приемниками. Таким образом точные расчеты позиционирования могут быть произведены даже в средах, содержащих слои пластов с магнитными характеристиками. В некоторых вариантах реализации изобретения местоположение может быть отслежено в течение времени, что дает оператору возможность определить, например, бурят ли скважину в надлежащем месте и по запланированной траектории скважины.
В некоторых вариантах реализации изобретения векторное соотношение между передатчиком монополя и приемником может быть выражено формулой

УРАВНЕНИЕ 4
где  представляет собой вектор местоположения приемника,
представляет собой вектор местоположения приемника,  представляет собой вектор местоположения ith передатчика,
представляет собой вектор местоположения ith передатчика,  представляет собой единичный вектор в направлении магнитного поля в связи с ith передатчиком на приемнике, и
представляет собой единичный вектор в направлении магнитного поля в связи с ith передатчиком на приемнике, и  представляет собой расстояние между ith передатчиком и приемником. В случае, когда есть Т, такие передатчики (т.е. i = 0, . . . , Т-1) используются, векторы могут быть разделены на компоненты декартовых координат для получения следующего матричного уравнения
представляет собой расстояние между ith передатчиком и приемником. В случае, когда есть Т, такие передатчики (т.е. i = 0, . . . , Т-1) используются, векторы могут быть разделены на компоненты декартовых координат для получения следующего матричного уравнения

УРАВНЕНИЕ 5
В матричном уравнении 5 предполагается, что местоположения передатчика и направление магнитного поля на приемниках точно известны, как и в случае относительной направленности приемника относительно глобальной эталонной системы координат, которая может быть получена гравиметром и инклинометром. ( ,
, ,
, ) представляет составляющие х, у и z единичного вектора
) представляет составляющие х, у и z единичного вектора  . Местоположение приемника может быть определено, например, путем умножения обеих сторон выражения на псевдообратное разложение матрицы, содержащее единичные векторы.
. Местоположение приемника может быть определено, например, путем умножения обеих сторон выражения на псевдообратное разложение матрицы, содержащее единичные векторы.
В приведенных выше уравнениях предполагается, что приемник может различать точное направление векторов напряженности поля, что может быть достигнуто путем использования трехосного приемника, который может обнаруживать данные о поле в трех направлениях, таких как, например, направления осей х, y и z. Позиционирование может быть выполнено даже тогда, когда приемник двухосный, т.е. когда приемник может обнаруживать данные о поле в двух направлениях, таких как, например, ось х и ось y. Фиг. 9 иллюстрирует магнитное поле, измеряемое двухосным приемником, при этом проиллюстрировано направление магнитного поля в связи с монопольным передатчиком Тi на приемнике R. В случае двухосного приемника можно определить проекцию вектора поля в плоскости приемников, что проиллюстрировано в виде вектора  . Может быть также определен произвольный вектор, который перпендикулярен плоскости, образованной приемниками (проиллюстрированными в виде
. Может быть также определен произвольный вектор, который перпендикулярен плоскости, образованной приемниками (проиллюстрированными в виде  ). Затем векторы и , а также местоположение передатчика (хi, уi, zi) может быть использовано для определения плоскости, в которой также находится местоположение приемника (х, y, z). В параметрической форме уравнения эта плоскость может быть определена формулой
). Затем векторы и , а также местоположение передатчика (хi, уi, zi) может быть использовано для определения плоскости, в которой также находится местоположение приемника (х, y, z). В параметрической форме уравнения эта плоскость может быть определена формулой

УРАВНЕНИЕ 6
Переменные ai и bi в уравнении 6 могут представлять собой вещественные числа с иным значением для каждой точки на плоскости. Если вектор положения не представляет собой произвольную точку на плоскости, а вместо этого обозначает, в частности, местоположение приемника, ai и bi становятся постоянными неизвестными, значения которых могут быть выведены для определения . В некоторых вариантах реализации изобретения, если есть по меньшей мере три передатчика и плоскости, определенные передатчиком, и местоположения приемника независимы, то может быть инвертировано местоположение приемника. Приведенное в качестве примера матричное уравнение, которое можно вывести для получения местоположения приемника (x, y, z), включает:

УРАВНЕНИЕ 7
Фиг. 10 представляет собой схему, которая иллюстрирует приведенную в качестве примера систему позиционирования, в соответствии с аспектами данного раскрытия изобретения. Система позиционирования содержит три передатчика монополя T0, T1 и T2, соответственно расположенные на поверхности в (2000, -1000, 0), (1000, 0, 0) и (3000, 0, 0) м, при этом (x, y, z) представляет собой вектор, составляющие которого представляют собой местоположение на соответствующей оси декартовых координат. Скважинный приемник R отслеживает траекторию, такую как ствол скважины, которая может быть параметризована как  метров, при этом θ варьирует между 0 и 30° в 1° шагах. Приемник R может включать трехосный приемник, выполненный с возможностью измерения всех составляющих магнитного поля, относительная направленность которого по отношению к эталонной системе координат известна.
метров, при этом θ варьирует между 0 и 30° в 1° шагах. Приемник R может включать трехосный приемник, выполненный с возможностью измерения всех составляющих магнитного поля, относительная направленность которого по отношению к эталонной системе координат известна.
Фиг. 11А-F иллюстрируют результаты приведенного в качестве примера моделирования позиционирования с помощью системы позиционирования, проиллюстрированной на Фиг. 10, и синтезированные данные, при этом инвертированное местоположение получают с помощью моделирования методом Монте-Карло. В частности, поскольку приемник R представляет собой трехосный приемник, уравнение 5 использовали для определения местоположения приемника R. Основную модель поля для передатчиков монополя, описанную в уравнении 1, использовали для моделирования, с напряженностью монополя,  , которая, как предполагается, представляет собой единицу и характеристики пласта, не взятые в расчет (т.е. пласт, как предполагают, является однородной, изотропной средой без изъяна). Когда были рассчитаны поля в местоположении приемника, добавляли комбинацию мультипликативных и аддитивных шумов для принятия в расчет всех отклонений от нормы и погрешностей в измерении, что выражено формулой
, которая, как предполагается, представляет собой единицу и характеристики пласта, не взятые в расчет (т.е. пласт, как предполагают, является однородной, изотропной средой без изъяна). Когда были рассчитаны поля в местоположении приемника, добавляли комбинацию мультипликативных и аддитивных шумов для принятия в расчет всех отклонений от нормы и погрешностей в измерении, что выражено формулой

УРАВНЕНИЕ 8
где SNR представляет собой определение соотношения сигнал-шум (или в данном случае соотношения сигнал-мультипликативный шум, так как распределение аддитивного шума, как предполагается, независимо от измеряемого поля) и при моделировании принимается равным 30. Функция u(-0,5,0,5) представляет собой произвольное число, взятое из равномерного распределения между -0,5 и 0,5.
На Фиг. 11А-F местоположение приемника вычисляется, когда параметр θ изменяется в диапазоне от 0 до 30° в 1° шагах. На каждом шаге инверсия повторялась 100 раз (с различным произвольным шумом, добавленным к идеальным бесшумным данным), и определялось среднее значение и стандартные отклонения местоположения приемника. Эти значения графически представлены на Фиг. 11А-C как функция фактической вертикальной глубины (ФВГ), а соответствующие погрешности относительно фактического местоположения приемника проиллюстрированы на Фиг. 11D-F. На этих фигурах более темная линия представляет собой среднее значение, а более легкая линия по обе стороны представляет собой среднее значение плюс-минус одно среднеквадратичное отклонение инвертированных результатов. Реальное местоположение приемника также проиллюстрировано сплошной линией на Фиг. 11A-C, а это показывает, что достаточно точное определение местоположения возможно благодаря очень простому процессу инверсии.
На основании результатов моделирования в соответствии с Фиг. 11A-F, описанная выше система позиционирования может давать точное определение местоположения приемника R относительно передатчиков. В частности, что результаты могут стать менее точными, когда приемник перемещается вниз, потому что амплитуда поля уменьшается, и воздействие аддитивного шума усиливается. В проиллюстрированном варианте реализации изобретения погрешность в местоположении z больше, чем другие составляющие, потому что предполагается, что все передатчики находятся на поверхности (z = 0 плоскость), уменьшая разрешение в направлении z. Однако направленности других передатчиков могут использоваться для увеличения диапазона и точности в направлении z и в других направлениях.
Помимо определения местоположения скважинного элемента с помощью магнитного монополя, магнитные монополи также могут использоваться для определения расстояния между передатчиком и приемником. В частности, если известно местоположение приемника относительно передатчика, то может быть легко вычислена его удаленность. Тем не менее диапазон скважинного элемента может также быть определен с использованием магнитных монополей, если относительное местоположение скважинного элемента не известно. Это может быть пригодно для определения расстояния между скважинными элементами, даже если не известны точные местоположения. Например, в некоторых случаях может быть потеряна устойчивость к воздействию давления внутри скважины (целевой скважины), и может быть пробурена вторичная скважина (разгрузочная скважина) для пересечения с целевой скважиной, чтобы сохранить уровень давления. Измерения расстояния могут быть использованы для определения расстояния между разгрузочной скважиной и целевой скважиной для обеспечения того, чтобы разгрузочная скважина точно пересекалась с целевой скважиной.
В некоторых вариантах реализации изобретения вычисление расстояния или диапазона между передатчиком и приемником может быть произведено с помощью уравнения поля, аналогичного уравнению (1), с компонентом (или проекцией) поля  в произвольном направлении
в произвольном направлении  , и выражается формулой
, и выражается формулой

Уравнение 9
Диапазон между передатчиком и приемником может быть определен с помощью уравнения 10 с принятием производной Hc в уравнение 9 в отношении декартового направления, в данном случае j:

УРАВНЕНИЕ 10
На практике производная операция уравнения 10 может соответствовать значению градиента магнитного поля, которое может быть выполнено с использованием двух приемников в непосредственной близости друг к другу, разделенных в производном направлении, j. В частности, оба приемника могут принимать первое и второе измеренные значения магнитного поля, и первое и второе измеренные значения могут вычитаться для выполнения производной операции или вычисления значения градиента магнитного поля.
Фиг. 12 иллюстрирует приведенные в качестве примера приемники R1 и R2 для производной операции, расположенные в непосредственной близости в направлении j. Результат производной операции в уравнении 10 может быть выражен формулой

УРАВНЕНИЕ 11
Можно предположить, что с и j являются ортогональными друг к другу таким образом, что  , тогда отношение Hc к его производной в становится:
, тогда отношение Hc к его производной в становится:

УРАВНЕНИЕ 12
Соответственно, если  известно, расстояние от передатчика до приемника может быть получено путем вычисления соотношения поля к его производной или градиенту в этом местоположении. Если два приемника в непосредственной близости друг от друга (такие как R1 и R2 на Фиг. 12) используются для нахождения производной или градиента, среднее значение поля в этих двух приемниках может быть использовано для нахождения самого поля.
известно, расстояние от передатчика до приемника может быть получено путем вычисления соотношения поля к его производной или градиенту в этом местоположении. Если два приемника в непосредственной близости друг от друга (такие как R1 и R2 на Фиг. 12) используются для нахождения производной или градиента, среднее значение поля в этих двух приемниках может быть использовано для нахождения самого поля.
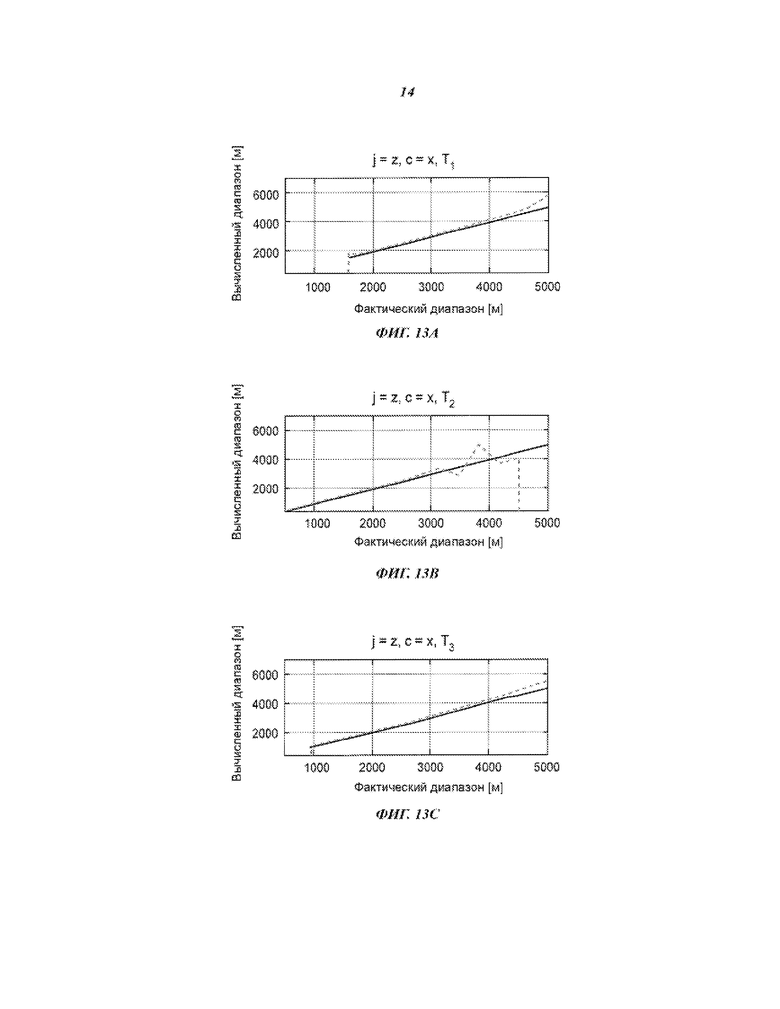
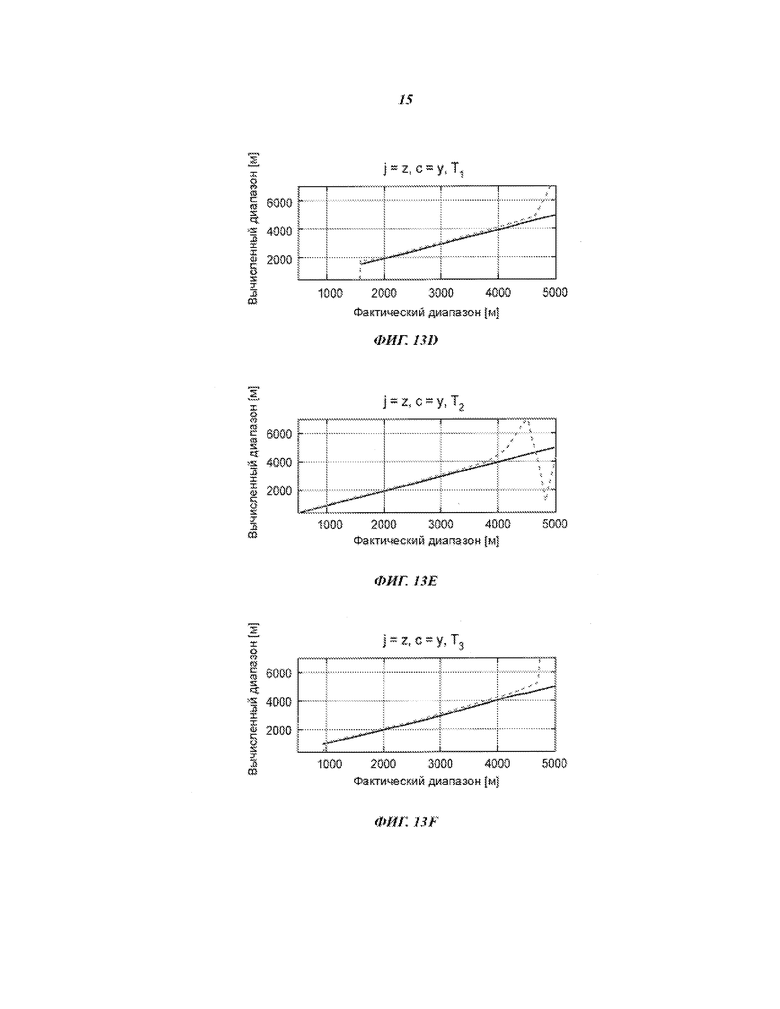
В некоторых вариантах реализации изобретения система позиционирования, проиллюстрированная на Фиг. 10, может быть адаптирована к датчику системы дальнометрии и позиционирования путем добавления дополнительных скважинных приемников для вычисления производных поля в глубине скважины. Фиг. 13А-F иллюстрируют результаты приведенного в качестве примера моделирования дальнометрии с использованием системы, описанной выше, и синтезированных данных. Диапазоны были вычислены с помощью двух приемников, расположенных в (х, у, z ± 50 м) посредством уравнения 12, при этом моделируемый диапазон проиллюстрирован в виде пунктирной линии, фактический диапазон проиллюстрирован в виде сплошной линии, производное направление (j) принято в качестве направления z и (x, y, z) представляет собой точку, диапазон действия которой вычисляют. В частности, диапазон в отношении всех трех передатчиков вычисляли отдельно для составляющих x и у (составляющих, перпендикулярных производному направлению).
Фиг. 13А-F иллюстрируют, что точные диапазоны могут быть вычислены для различных местоположений приемника относительно передатчиков, при этом диапазон точно соответствует расстоянию около 3000 м с использованием раскрытого способа и выбранного набора параметров. В большинстве случаев одной производной с применением двух приемников может быть достаточно, чтобы вычислить диапазон, но дополнительные приемники могут повысить точность вычисления. Тем не менее, если оба приемника находятся на одном и том же радиальном расстоянии от передатчика магнитного монополя, амплитуда поля в этих двух приемниках может быть одной и той же, что предотвращает вычисление значения производной. Для предотвращения таких слепых пятен производная может быть определена во всех трех перпендикулярных направлениях в практической реализации изобретения.
В некоторых вариантах реализации изобретения общие вычисления местоположения и/или диапазона с использованием магнитных монополей, описанные выше, могут быть применены в конкретных скважинных применениях, таких как маркировка местоположения на целевой скважине. Как описано выше, в определенных случаях, как, например, при фонтанировании, может потребоваться пересечение первой скважины, называемой целевой скважиной, со второй скважиной, называемой разгрузочной скважиной. Вторая скважина может быть пробурена с целью пересечения целевой скважины, например, чтобы ослабить давление со стороны изливающейся скважины. Пересечение целевой скважины с разгрузочной скважиной, как правило, требует множественных скважинных измерений для определения точного местонахождения целевой скважины и точки на целевой скважине, в которой разгрузочная скважина должна пересечь целевую скважину. Быстрое и качественное пересечение целевой скважины может играть важную роль в успешном выполнении работ.
Фиг. 14 представляет собой схему приведенной в качестве примера буровой системы с применением магнитных монополей, в соответствии с аспектами данного раскрытия изобретения. В проиллюстрированном варианте реализации изобретения целевая скважина 1410 размещена в пласте, а разгрузочную скважину 1430 бурят для ее пересечения с целевой скважиной 1410. В проиллюстрированном варианте реализации изобретения один или более передатчиков магнитного монополя 1420 могут находиться внутри целевой скважины 1410 в непосредственной близости к обсадной колонне 1415 в местоположении, в котором разгрузочная скважина 1430 должна пересекаться с целевой скважиной 1410. Буровая компоновка (не проиллюстрирована) внутри целевой скважины 1430 может содержать по меньшей мере один приемник для измерения радиальных магнитных полей, генерируемых передатчиками монополя 1420.
Одна или более систем управления (не проиллюстрированы) могут быть соединены с передатчиками 1420 и приемниками для передачи команды передатчикам 1420 образовывать радиальные магнитные поля, а приемникам - измерять магнитные поля. По меньшей мере расстояние от передатчиков 1420 до приемников или относительное местоположение передатчиков 1420 по отношению к приемникам могут быть вычислены в системах управления. С помощью вычислений диапазона или местоположения траектория разгрузочной скважины 1430 может быть вычислена заново и скорректирована для обеспечения того, что разгрузочная скважина 1430 пересечет целевую скважину 1410 в местоположении, указанном передатчиками 1430. Без передатчиков магнитного монополя 1420 разгрузочная скважина 1430 сможет обнаружить обсадную колонну 1415 в скважине 1410, которую необходимо пересечь, но не сможет рассчитать конкретную точку на скважине 1410, в которой должно произойти пересечение.
Другое приведенное в качестве примера применение бурения с использованием магнитных монополей, а также соответствующих вычислений диапазона и местоположение, описанных выше, включает применение ПГД. В системах ПГД вторую скважину бурят параллельно существующей горизонтальной скважине в требуемой области пространства, и в верхнюю скважину может быть закачан под высоким давлением пар для нагрева нефти и снижения ее вязкости, благодаря чему нагретая нефть стекает в нижнюю скважину, откуда ее можно откачивать. Фиг. 15 иллюстрирует один вариант реализации системы ПГД с применением магнитных монополей. Как проиллюстрировано в варианте реализации изобретения на Фиг. 15, передатчики магнитного монополя 1520 могут быть установлены в уже существующей первой горизонтальной скважине 1510 в непосредственной близости к обсадной колонне 1515 скважины. Вторую скважину 1530 могут бурить для ее следования за первой скважиной 1510 или для ее отображения первой скважины на заранее заданном расстоянии. Буровая компоновка (не проиллюстрирована) внутри второй скважины 1530 может содержать по меньшей мере один приемник, который измеряет радиальные магнитные поля, генерируемые передатчиками 1520. Измерения могут применяться для определения диапазона и/или относительного местоположения приемников по отношению к передатчикам 1520, что, в свою очередь, может быть использовано для корректировки траектории второй скважины 1530.
Магнитные монополи могут быть использованы и в других применениях. Например, магнитные монополи могут быть применены для обеспечения того, что несколько скважин в пределах одного и того же пласта не пересекутся, при помощи радиальных магнитных полей, генерируемых магнитными монополями, для вычисления диапазона между скважинами с целью обеспечения заданного определенного расстояния между ними. Кроме того, магнитные монополи могут быть применены в случае типичных тросовых инструментов или инструментов КВБ/ИВБ для увеличения диапазона получаемых измерений в связи с более мощными магнитными полями, генерируемыми магнитным монополем. Подобным образом во всех описанных выше применениях работы позиционирования и относительного расположения приемников и передатчиков могут проводиться в режиме переключения.
В соответствии с аспектами данного раскрытия изобретения, приведенный в качестве примера способ проведения скважинных работ с применением магнитного монополя может включать позиционирование по меньшей мере одного из передатчика и приемника внутри первой скважины. По меньшей мере один из передатчика и приемника может представлять собой магнитный монополь. Передатчик может генерировать первое магнитное поле, а приемник может измерять сигнал, соответствующий первому магнитному полю. Блок управления, коммуникативно соединенный с приемником, может определять по меньшей мере одну характеристику на основании полученного сигнала.
В некоторых вариантах реализации изобретения передатчик и приемник могут быть расположены на одном и том же инструменте, таком как тросовый инструмент или устройство КВБ/ИВБ, которые могут быть расположены внутри первой скважины. Приемник может измерять вторичные магнитные поля, генерируемые первичным магнитным полем, а блок управления может определять характеристики пласта, такие как диэлектрическая проницаемость, удельное сопротивление и т.п. на основании вторичного магнитного поля.
В некоторых вариантах реализации изобретения, либо передатчик, либо приемник может быть расположен на уровне поверхности над первой скважиной или внутри второй скважины, и может быть определено относительное местоположение и/или расстояние между обеими скважинами. Например, приемник может быть размещен внутри первой скважины на инструменте для каротажа в процессе бурения или инструменте для измерения в процессе бурения, а передатчик может быть одним из множества передатчиков, расположенных внутри второй скважины. В некоторых вариантах реализации изобретения вторая скважина может включать целевую скважину, и множество передатчиков может быть расположено в точке пересечения точки в целевой скважине. В некоторых вариантах реализации изобретения вторая скважина может представлять собой горизонтальную скважину, такую как скважина в применении ПГД, и множество передатчиков может быть расположено по всей длине горизонтальной скважины. Вычисления расстояния и/или местоположения могут быть произведены по отношению к множеству передатчиков и приемнику, и данные вычисления могут быть использованы для определения траектории бурения первой скважины.
Следовательно, данное раскрытие изобретения хорошо приспособлено для достижения целей и указанных преимуществ, которые в нем заложены. Конкретные варианты реализации изобретения, раскрытые выше, приведены только в качестве иллюстрации, поскольку данное изобретение может быть модифицировано и реализовано различными, но эквивалентными способами, очевидными для специалистов в данной области техники, извлекающих пользу из принципов данного документа. Кроме того, ничто из приведенного не предназначено для ограничения проиллюстрированных в данном документе деталей конструкции или устройства, за исключением случаев, описанных далее в формуле изобретения. Поэтому очевидно, что конкретные иллюстративные варианты реализации изобретения, раскрытые выше, могут быть изменены или модифицированы и все такие различные варианты рассматриваются в пределах объема и сущности данного изобретения. К тому же, термины в формуле изобретения имеют свое ясное, обычное значение, если иное явно и четко не определено патентообладателем. Термины, приведенные, например, в формуле изобретения в единственном числе, предназначены для обозначения одного или более чем одного элемента, который они представляют. Кроме того, термины "соединяют", "соединены" или "соединяющие" включают прямое или косвенное соединение посредством промежуточных конструкций или устройств.













Изобретение относится к разведке нефтяных месторождений, в частности к дальномерной системе позиционирования и методике с применением магнитных монополей. Техническим результатом является точное определение местоположения приемника относительно передатчиков и определение расстояния между передатчиком и приемником за счет использования передатчика и/или приемника, содержащего магнитный монополь. Способ включает позиционирование по меньшей мере одного из: передатчика и приемника внутри первой скважины. При этом по меньшей мере один из передатчика и приемника содержит магнитный монополь, генерирование передатчиком первого магнитного поля, измерение приемником сигнала, соответствующего первому магнитному полю, и определение по меньшей мере одной скважинной характеристики посредством сигнала, полученного блоком управления, коммуникативно соединенным с приемником. Причем указанная по меньшей мере одна скважинная характеристика включает в себя определение по меньшей мере одного из: расстояние между передатчиком и приемником, и местоположение приемника относительно передатчика. 2 н. и 27 з.п. ф-лы, 15 ил.
1. Способ скважинных измерений, включающий:
позиционирование по меньшей мере одного из: передатчика и приемника внутри первой скважины, при этом по меньшей мере один из: передатчика и приемника содержит магнитный монополь;
генерирование передатчиком первого магнитного поля;
измерение приемником сигнала, соответствующего первому магнитному полю; и
определение по меньшей мере одной скважинной характеристики посредством
сигнала, полученного блоком управления, коммуникативно соединенным с приемником,
причем указанная по меньшей мере одна скважинная характеристика включает в себя определение по меньшей мере одного из: расстояние между передатчиком и приемником, и местоположение приемника относительно передатчика.
2. Способ по п. 1, отличающийся тем, что позиционирование по меньшей мере одного из: передатчика и приемника внутри первой скважины включает одно из:
позиционирование передатчика и приемника внутри первой скважины на тросовом инструменте; и
позиционирование передатчика и приемника внутри первой скважины на инструменте для каротажа в процессе бурения или инструменте для измерения в процессе бурения.
3. Способ по п. 1, отличающийся тем, что позиционирование по меньшей мере одного из: передатчика и приемника внутри первой скважины включает постоянное позиционирование передатчика и приемника на обсадной колонне.
4. Способ по п. 1, дополнительно включающий позиционирование других передатчика и приемника либо на уровне поверхности, либо внутри второй скважины.
5. Способ по п. 4, отличающийся тем, что
позиционирование по меньшей мере одного из: передатчика и приемника внутри первой скважины включает позиционирование приемника внутри первой скважины на инструменте для каротажа в процессе бурения или инструменте для измерения в процессе бурения; и
позиционирование других передатчика и приемника либо на уровне поверхности, либо внутри второй скважины включает позиционирование множества передатчиков внутри второй скважины.
6. Способ по п. 5, отличающийся тем, что позиционирование множества передатчиков внутри второй скважины включает позиционирование множества передатчиков в непосредственной близости к точке пересечения в целевой скважине.
7. Способ по п. 5, отличающийся тем, что позиционирование множества передатчиков внутри второй скважины включает позиционирование множества передатчиков по всей длине горизонтальной скважины.
8. Способ по любому из пп. 5-7, отличающийся тем, что определение по меньшей мере одной скважинной характеристики посредством полученного сигнала включает определение по меньшей мере одного из: расстояния между множеством передатчиков и приемником, и местоположения приемника относительно множества передатчиков.
9. Способ по п. 8, дополнительно включающий изменение траектории бурения, основанное по меньшей мере частично на скважинной характеристике.
10. Способ по п. 1, отличающийся тем, что передатчик постоянно позиционируется в первой скважине.
11. Способ по п. 1, дополнительно включающий выполнение первого измерения и второго измерения первого магнитного поля, причем определение расстояния между передатчиком и приемником включает вычисление значения градиента магнитного поля с помощью первого измеренного значения и второго измеренного значения.
12. Способ по п. 11, отличающийся тем, что вычисление значения градиента включает вычисление разности между первым измеренным значением и вторым измеренным значением.
13. Способ по п. 11, отличающийся тем, что второе измеренное значение является значением градиента.
14. Способ по любому из пп. 11-13, отличающийся тем, что определение расстояния между передатчиком и приемником включает определение соотношения между первым измерением и значением градиента.
15. Способ по п. 1, отличающийся тем, что местоположение вычисляется по меньшей мере частично на основании направления первого магнитного поля.
16. Способ по п. 1, отличающийся тем, что местоположение вычисляется только на основании направления первого магнитного поля.
17. Устройство для скважинных измерений, содержащее:
передатчик, который генерирует магнитное поле;
приемник, который обнаруживает магнитное поле, сгенерированное передатчиком, при этом по меньшей мере один из: передатчика и приемника содержит магнитный монополь; и
блок управления, коммуникативно соединенный с передатчиком и приемником, причем блок управления содержит набор команд, которые при выполнении их процессором блока управления побуждают процессор к:
генерированию для передатчика первой команды на генерирование первого магнитного поля; и
генерированию для приемника второй команды на измерение сигнала, соответствующего первому магнитному полю; и
определению по меньшей мере одной скважинной характеристики на основании полученного сигнала;
причем по меньшей мере одна скважинная характеристика включает по меньшей мере одно из: расстояние между передатчиком и приемником, и местоположение приемника относительно передатчика.
18. Устройство по п. 17, отличающееся тем, что магнитный монополь является одним из: монополя изменяющегося тока и монополя постоянного тока.
19. Устройство по п. 18, отличающееся тем, что монополь изменяющегося тока содержит вытянутую рамочную антенну.
20. Устройство по п. 18, отличающееся тем, что монополь изменяющегося тока содержит удлиненный магнит.
21. Устройство по п. 19 или 20, отличающееся тем, что другой из: приемника или передатчика представляет собой гальванический источник или диполь.
22. Устройство по п. 21, отличающееся тем, что другой из: приемника или передатчика представляет собой электрический диполь.
23. Устройство по п. 17, отличающееся тем, что передатчик и приемник соединены с одним из: тросового инструмента и инструмента для каротажа в процессе бурения или инструмента для измерения в процессе бурения.
24. Устройство по п. 17, отличающееся тем, что сигнал, соответствующий первому магнитному полю, включает вторичное магнитное поле, сгенерированное первым магнитным полем; и по меньшей мере одна скважинная характеристика включает по меньшей мере одну характеристику пласта, окружающего скважину.
25. Устройство по п. 17, отличающееся тем, что
один из: передатчика и приемника расположен внутри первой скважины; и
другой из: передатчика и приемника расположен либо на уровне поверхности, либо внутри второй скважины.
26. Устройство по п. 25, отличающееся тем, что
приемник расположен внутри первой скважины на инструменте для каротажа в процессе бурения или инструменте для измерения в процессе бурения; и
передатчик содержит множество передатчиков, расположенных внутри второй скважины.
27. Устройство по п. 26, отличающееся тем, что
вторая скважина содержит целевую скважину; и
множество передатчиков расположено в непосредственной близости к точке пересечения в целевой скважине.
28. Устройство по п. 26, отличающееся тем, что
вторая скважина содержит горизонтальную скважину; и
множество передатчиков расположено по всей длине горизонтальной скважины.
29. Устройство по любому из пп. 26-28, отличающееся тем, что по меньшей мере одна скважинная характеристика включает по меньшей мере одно из: расстояния между множеством передатчиков и приемником, и местоположения приемника относительно множества передатчиков.
| US 20050030021 A1, 10.02.2005 | |||
| RU 95111057 A1, 28.06.1995 | |||
| US 20020000808 A1, 03.01.2002 | |||
| US 3315264 A1, 18.04.1967 | |||
| СПОСОБ ГЕНЕРИРОВАНИЯ И ПРИЕМА ГРАВИТАЦИОННЫХ ВОЛН И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2001 |
|
RU2184384C1 |

