Изобретение относится к области обнаружения и поражения малогабаритных беспилотных летательных аппаратов (МБЛА) и может быть использовано в военной технике.
Известны различные методы и технические решения обнаружения и поражения МБЛА с использованием устройства сети-ловушки для борьбы с дистанционно пилотируемыми (беспилотными) летательными аппаратами (ДПЛА) (патент №72753, прототип), устройство борьбы с дистанционно пилотируемыми (беспилотными) летательными аппаратами (патент №72754).
Недостатками являются: сложность конструкции, большие размеры, большая мощность двигателя для буксировки сети из-за ее большого аэродинамического сопротивления; использование звукотеплового метода наводки на цель, который малоэффективен из-за низкого энергопотребления цели - ДПЛА и высокой стоимости самого устройства наведения, и обязательного применения низких температур для инфракрасных датчиков; отсутствие парашюта или иного устройства, смягчающего приземление.
Устройство - истребитель для уничтожения дистанционно пилотируемых (беспилотных) летательных аппаратов (патент №2490585, прототип) [3].
Недостатками являются использование радиолокатора для наведения средства к цели при ведении радиоэлектронной борьбы, что может привести к полной потере управления ДПЛА на этапе выхода устройства в рабочий режим видеокамер и датчиков, отсутствие камер кругового обзора, сложность конструкции, непредсказуемое влияние инерционных взрывателей на направленность полета игл, что может повлиять на их попадание в МБЛА, имеющий малые размеры.
Использование противовертолетной мины (патент РФ №2237859, прототип). Сущность изобретения заключается в следующем.
1. Противовертолетная мина, содержащая боевую часть направленного действия, состоящую из корпуса с размещенным в нем зарядом взрывчатого вещества, детонатором и металлическим поражающим блоком, систему нацеливания и систему подрыва, включающую неконтактный взрыватель, отличающаяся тем, что система нацеливания выполнена полноповоротной с возможностью нацеливания по экваториальному углу в пределах ±180° от исходного положения и в пределах от 0 до 90° по меридиональному углу и включает датчик координат цели, блок управления, механический или гидравлический привод, источник питания, при этом металлический поражающий блок выполнен или в виде пластины, или в виде одного или нескольких слоев готовых поражающих элементов, или в виде облицовки для формирования "ударного ядра", или в виде набора параллельно уложенных стержней, попеременно соединенных верхними и нижними концами.
2. Мина по п. 1, отличающаяся тем, что датчик координат цели выполнен с использованием оптического, магнитного или акустического сигнала цели; датчик координат цели выполнен с использованием радиолокационной системы, включающей высокочастотный передатчик, антенну, приемник, усилитель; система нацеливания выполнена с устройством опознавания цели "свой - чужой"; пластина выполнена прямоугольной формы, выгнутой в направлении метания; пластина выполнена заданного дробления; пластина выполнена с выдавленными полусферическими углублениями, обращенными вершинами к заряду взрывчатого вещества, при этом оси полусферических углублений размещены под углом к направлению метания; готовые поражающие элементы имеют форму, допускающую их плотную укладку, например форму куба, параллелепипеда, шестигранной призмы; готовые поражающие элементы выполнены в форме пластин с широкой стороной в виде неравнобочной трапеции, имеющей один из углов при основании трапеции равным 90°; готовые поражающие элементы выполнены с заданным расстоянием между проекцией центра масс на грань, обращенную к заряду взрывчатого вещества, и точкой приложения равнодействующей сил давления продуктов детонации на эту грань [3].
Известное изобретение имеет следующие недостатки: малая дальность действия поражающих элементов, одноразовое использование, невозможность использования в движении, активный метод обнаружения, низкая возможность использования против МБЛА, из-за их малых размеров и использования электродвигателей.
Предлагаемая система обнаружения и поражения МБЛА включает в себя средства обнаружения и прицеливания, а также устройства поражения, характеризующие параллельную работу в оптическом, звуковом и радиолокационном диапазонах электромагнитных волн, возможности размещения на подвижных объектах, создания достоверного трехмерного объемного изображения МБЛА и определения его дальнейшего направления движения для прицеливания и поражения ракетами.
Средство обнаружения и прицеливания состоит из трех и более пространственно разнесенных точек обнаружения на гиростабилизирующих платформах 1, связанных между собой рабочими базами 2, автоматически определяющими расстояния между собой и свои пространственные координаты, что позволяет разместить в любых удобных местах как на подвижном объекте, так и стационарном (фиг. 1). На каждой базе размещено по три датчика: датчик 3 (камера кругового обзора), работающий в оптическом диапазоне, датчик 4, работающий в акустическом диапазоне, и датчик 5, работающий в трех и более настраиваемых радиолокационных диапазонах электромагнитных волн. Управление работой и обработкой полученной информации осуществляется ЭВМ 6 с элементами искусственного интеллекта, который сам выбирает наиболее эффективные датчики для более точного обнаружения и определения пространственных координат МБЛА и прицеливания устройств поражения в различных условиях.
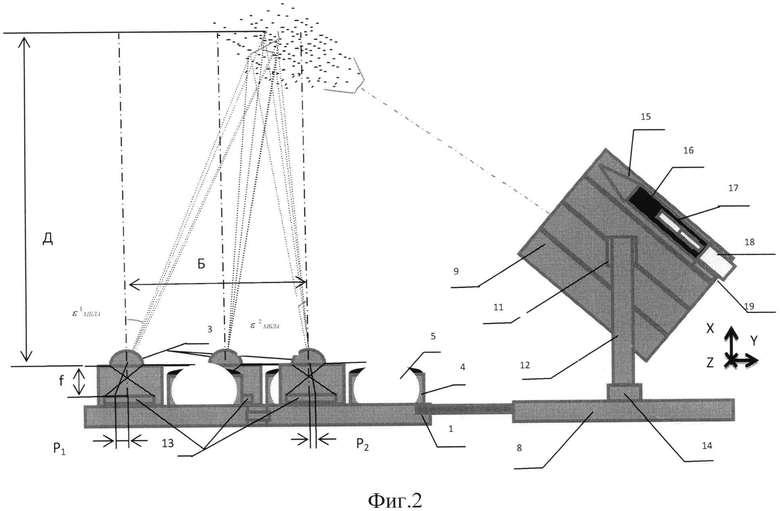
Рассчитанные пространственные координаты по информационному лазерному каналу 7 (проводной резервный) через входное и выходное устройство (размещено на гиростабилизированной платформе 8) поступают в устройства поражения. Гиростабилизированная платформа 8 предназначена для устойчивой работы боевой части пакета направляющих с кассетным заряжанием для поражения МБЛА противника во время стрельбы, размещения блока питания, кругового беспроводного соединения с ЭВМ 6 и крепления механизмов наведения пакета направляющих 9 для установки контейнера 10 с шестнадцатью и более ракетами. Наведение пакета направляющих 9 осуществляется с помощью механизмов горизонтального наведения 14 (фиг. 2) и вертикального наведения 11 с помощью электродвигателей, питание которых поступает через вилку карданного подвеса 12. Ракета состоит из головной части 15 с оперением для устойчивого полета, элементов поражения 16, взрывчатого вещества и детонатора с замедлителями 17, двигателя на твердом топливе 18. Установка таймера замедлителя и пуск ракеты производятся с помощью электродатчика 19, сигналом переданного с ЭВМ 6. Ракеты размещаются в контейнере, а их пуск осуществляется по выбору ЭВМ 6, в зависимости от класса МБЛА. Перезарядка осуществляется кассетной установкой ракет в направляющую.
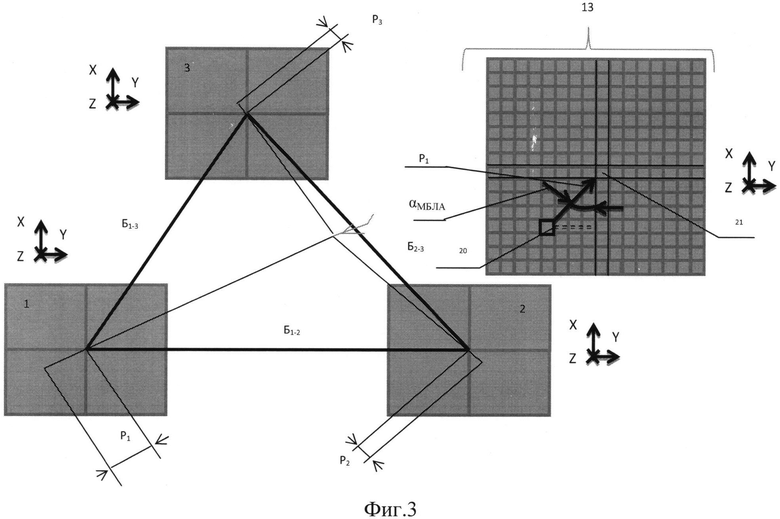
Система обнаружения и поражения МБЛА работает в следующей последовательности: одновременно регистрируя кадры видеопоследовательности и определения геометрических и цветовых изменений сформированных изображений [4], согласно изобретению контрольное (наиболее ярко-выраженное) и сравниваемое цифровые изображения регистрируют одновременно для каждого фрагмента изображений тремя и более идентичными видеосистемами (датчиками) 3 на основе многоэлементных высокоскоростных фотоприемников 13 (фиг. 2). Анализ изображений проводится на ЭВМ 6, где определяются величины смещения P1, Р2, Р3 (фиг. 3) характерных фрагментов 20 (фиг. 4) сравниваемого изображения с аналогичными фрагментами контрольного при максимально возможном их совпадении в направлении параллактического смещения 21. Сущность измерения расстояния до МБЛА заключается в суммарном определении линейного параллакса, которое рассчитывается между двумя датчиками 1-2 (2-3, 1-3 или 1-i), одновременно по трем и более базам (фиг. 3) по формуле Д=Б/tgεМБЛА (стереоскопический базовый метод измерения дальности). Дальность Д до МБЛА определяется по величине параллактического угла εМБЛА определяемой суммой εМБЛА=ε1 МБЛА+ε2 МБЛА=P1/f+P2/f и по величине базы между датчиками Б [5]. Использование трех и более приемных устройств позволяет определять достоверные трехмерные объемные изображения МБЛА. Для наиболее достоверного обнаружения и распознавания МБЛА в условиях плохой видимости, когда оптический канал по выбору ЭВМ 6 не эффективно использовать (густой туман, полная темнота и т.д.), в процессе обнаружения используется звуковой и радиолокационный каналы. Датчики 4 и 5 размещены совместно на гиростабилизирующих платформах 1 и параллельно фиксируют появления объекта, и также с помощью ЭВМ 6 определяют пространственные координаты МБЛА в звуковом и радиолокационном диапазонах электромагнитных волн.
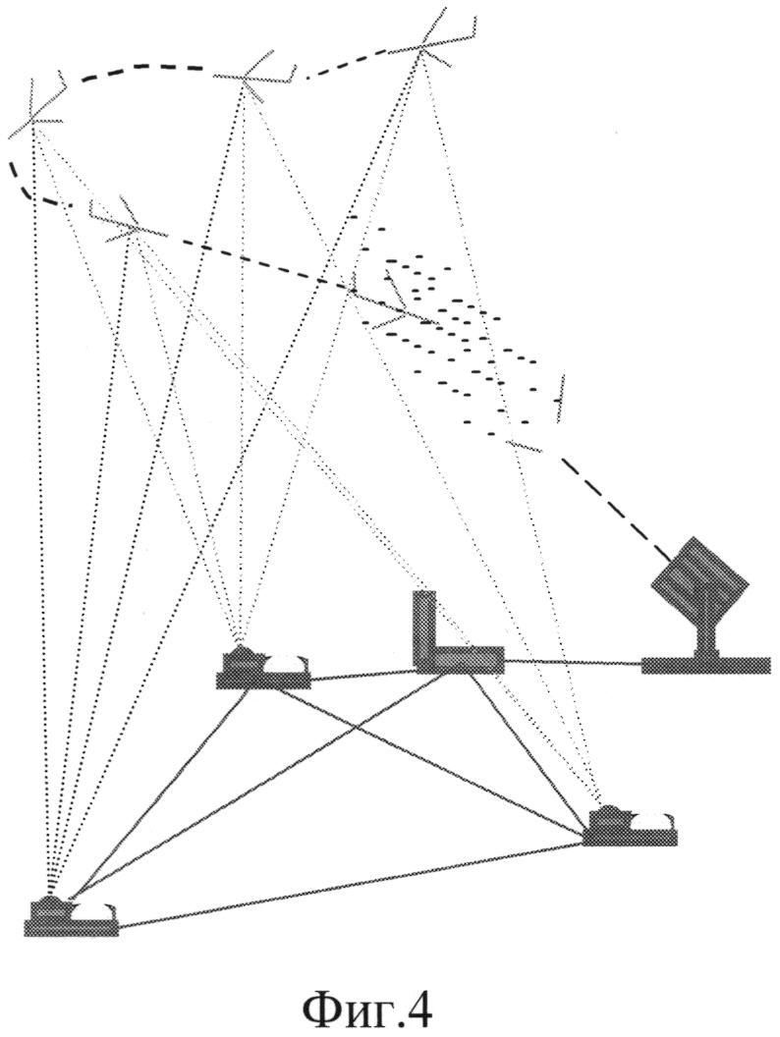
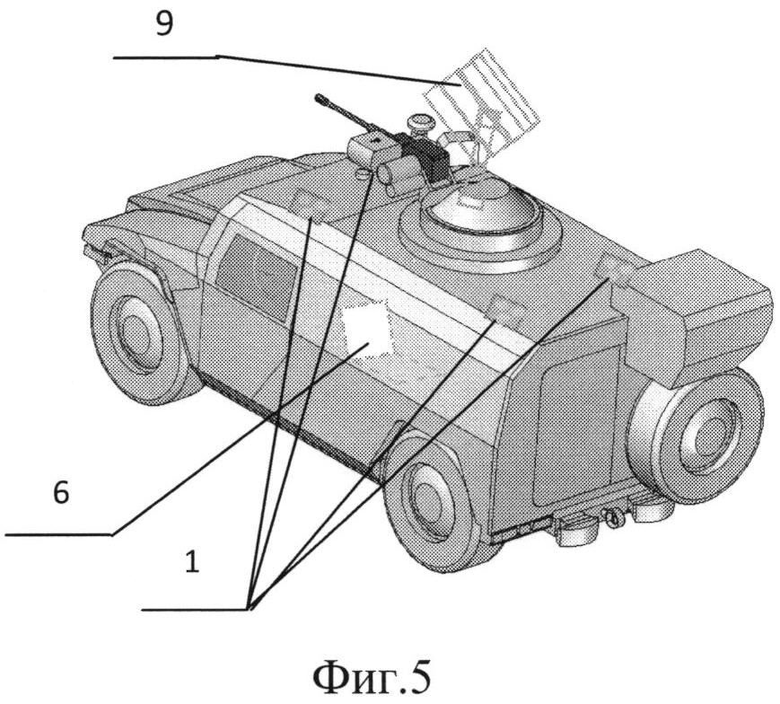
Используя определенные координаты датчиков 3 и углы направления ε1 МБЛА, ε2 МБЛА, ЭВМ 6 рассчитывает пространственные координаты МБЛА и гиростабилизированной боевой части пакета направляющей в оптическом диапазоне электромагнитных волн. Определяя постоянно пространственные координаты, ЭВМ 6 определяет скорость и направление движения, что позволяет производить сопровождение МБЛА и прицеливание. При определении противника пространственные координаты передаются на механизмы наведения, которые разворачивают направляющие в стороны МБЛА и производится выстрел одной ракеты (фиг. 4). На расчетной высоте с помощью детонатора происходит подрыв взрывчатого вещества 17, при взрыве которого элементы поражения 16 разлетаются по строго секционной направленности, имея максимальную эффективность поражения МБЛА. Используя датчики обнаружения, ЭВМ 6 оценивает попадание, при необходимости повторяет выстрел или переходит в пассивный режим работы, используя средства обнаружения. Вариант размещения системы обнаружения и поражения на подвижном объекте показан на фиг. 5.
Источники информации
1. Пархоменко В.А., Устинов Е.М., Пушкин В.А., Беляков В.А., Шишков С.В. Устройство борьбы с дистанционно пилотируемыми (беспилотными) летательными аппаратами. - ФИПС. Патент на полезную модель №72754, 27.04.08 г.
2. Богомолов А.И., Пархоменко В.А., Устинов Е.М., Елизаров С.С., Искоркин Д.В., Шишков С.В. Устройство сети-ловушки для борьбы с дистанционно пилотируемыми (беспилотными) летательными аппаратами. - ФИПС. Патент на полезную модель №72753, 27.04.08 г.
3. Голодяев А.И., Чистяков Н.В. Устройство - истребитель для уничтожения дистанционно пилотируемых (беспилотных) летательных аппаратов. - ФИПС Патент на изобретение №2490585 15.05.2012 г.
4. Одинцов В.А., Долгопятова Н.Р., Кобылкин И.Ф., Костылев В.К., Ладов С.В., Метасов В.Ф., Попов В.А. Противовертолетная мина. - ФИПС. Патент на изобретение №2237859, 10.10.2004 г.
5. Шишков С.В., Музаи К., Устинов Е.М., Пархоменко А.В., Чернов Е.М., Щербаков А.С Программа определения геометрических изменений на кадрах видеопоследовательности для обнаружения ДПЛА. - ФИПС. Свидетельство о государственной регистрации программы для ЭВМ №2013611694, 31.01.13 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС БОРЬБЫ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2018 |
|
RU2700107C1 |
| СИСТЕМА УПРАВЛЕНИЯ КОМПЛЕКСНЫМИ МЕТОДАМИ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2014 |
|
RU2578524C2 |
| ТЕРМОБАРИЧЕСКИЙ СПОСОБ БОРЬБЫ С РОЕМ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2019 |
|
RU2733600C1 |
| СТАЦИОНАРНЫЙ КОМПЛЕКС ОБНАРУЖЕНИЯ И ПОРАЖЕНИЯ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2019 |
|
RU2734267C1 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2565860C2 |
| СПОСОБ ГОЛОГРАФИЧЕСКОЙ СКРЫТНОСТИ ОБЪЕКТОВ ОТ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2571534C2 |
| СПОСОБ ЗАХВАТА МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2565863C2 |
| МЕТОД ОБНАРУЖЕНИЯ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2559332C1 |
| Способ функционального подавления беспилотного летательного аппарата | 2018 |
|
RU2700207C1 |
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2574224C1 |
Изобретение относится к области обнаружения и поражения малогабаритных беспилотных летательных аппаратов (МБЛА). Система обнаружения и поражения МБЛА состоит из средств обнаружения и прицеливания, устройств поражения, боевой части пакета направляющих, ракеты, состоящей из головной части, поражающих элементов, взрывчатого вещества, детонатора, блока питания. Средства обнаружения и прицеливания выполнены на трех гиростабилизированных платформах, связанных между собой рабочими базами, автоматически определяющими расстояния между собой и свои пространственные координаты. На каждой базе размещены датчики, работающие в оптическом, акустическом и в настраиваемых радиолокационных диапазонах электромагнитных волн. Управление работой и обработку полученной информации и сигналов осуществляет ЭВМ. Достигается возможность поражения МБЛА в различных условиях наблюдения. 5 ил.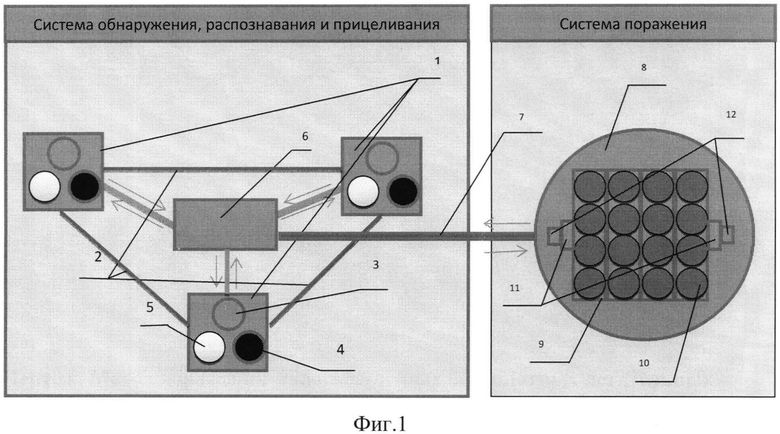
Система обнаружения и поражения малогабаритных беспилотных летательных аппаратов (МБЛА), состоящая из средств обнаружения и прицеливания, устройств поражения, боевой части пакета направляющей, ракеты, состоящей из головной части, поражающих элементов, взрывчатого вещества, детонатора, блока питания, отличающаяся тем, что средства обнаружения и прицеливания выполнены на трех и более пространственно разнесенных точках на гиростабилизирующих платформах, связанных между собой рабочими базами, автоматически определяющими расстояния между собой и свои пространственные координаты, что позволяет разместить в любых удобных местах как на подвижном, так и на стационарных объектах, на каждой базе размещены датчики, работающие в оптическом, акустическом и в настраиваемых радиолокационных диапазонах электромагнитных волн, управление работой и обработкой полученной информации и сигналов осуществляет ЭВМ с элементами искусственного интеллекта, который сам выбирает наиболее эффективные датчики для более точного обнаружения и определения пространственных координат МБЛА в различных условиях ведения наблюдения, позволяет построить объемное 3D изображение МБЛА и сравнить с запрограммированными МБЛА для их распознавания и прицеливания устройства поражения МБЛА по рассчитанным пространственным координатам МБЛА и гиростабилизированной боевой части пакета направляющих с кассетным заряжанием, используя механизмы наведения в точку упреждения, запускает таймеры настраиваемых детонаторов ракеты с оперением - одну из шестнадцати и более, производит контроль поражения МБЛА.
| Клеточка-нуклеус для почтовой пересылки пчелиных маток | 1948 |
|
SU82031A1 |
| РАСКАТНИК СТЕКЛА | 0 |
|
SU310869A1 |
| Способ электролитического меднения из цианисто-медных электролитов | 1947 |
|
SU72754A1 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ НИЗКОЛЕТЯЩИХ ЦЕЛЕЙ | 2007 |
|
RU2361235C1 |
| US 2007098052 A1, 03.05.2007. | |||

