Изобретение относится к области обнаружения и идентификации беспилотных летательных аппаратов (БпЛА), в том числе их наземных станций управления (НСУ), а также применяемых в составе пространственно-распределенного комплекса (ПРК) (далее по тексту - БпЛА (НСУ)/ПРК БпЛА) и может быть использовано в технике обнаружения различных комплексов с БпЛА.
Известны различные способы и технические решения для обнаружения летательных аппаратов, в том числе и беспилотных, с использованием: способа кругового обзора матричным фотоприемным устройством и устройства для его осуществления [Броун Ф.М., Волков Р.И., Филатов М.И., Хазанов A.M. Способ кругового обзора матричным фотоприемным устройством и устройство для его осуществления. - Патент на изобретение №2445644, 20.03.2012], оптического локатора кругового [Архипов В.Г., Чжан Ю.В. Оптический локатор кругового обзора. - Патент на изобретение №2352957, 20.04.2009], способа визуально-оптического контроля лазерного сканирования атмосферы [Попсуй С.П., Таурин В.Э., Швецов И.В., Швецова С.А. Способ визуально-оптического контроля лазерного сканирования атмосферы. - Патент на изобретение №2489732, 10.08.2013], способа обнаружения объектов [Подгорнов В.А. Способ обнаружения объектов. - Патент на изобретение №2331084, 10.08.2008], способа радиолокационного распознавания группы однотипных малоразмерных БпЛА [Мамедов В.А., Сисигин И.В., Колесников К.О., Равдин Д.А., Беляев А.В., Комонов B.C. Способ радиолокационного распознавания группы однотипных малоразмерных БпЛА беспилотных летательных аппаратов. - Патент на изобретение №2787843, 13.01.2023], способа обнаружения работы каналов управления БпЛА [Дидук Л.И., Добрынин Д.Л., Мысив В.В. Способ обнаружения работы каналов управления беспилотным летательным аппаратом. Патент на изобретение №2653530, 11.05.2018], акустического способа обнаружения БпЛА [Деркачев П.Ю., Косогор А.А., Тихов Ю.И. Акустический способ обнаружения беспилотных летательных аппаратов. Патент на изобретение №2749651, 16.06.2021] с использованием которых осуществляется обнаружение и идентификация летательным аппаратам, в том числе и БпЛА (НСУ)/ПРК БпЛА. Недостатками данных способов являются:
1. Большие массогабаритные размеры и энергопотребление, что не всегда позволяет реализовать их на мобильных, в том числе и на летно-подъемных средствах в связи с имеющимися конструктивными и энергетическими ограничениями.
2. Малая дальность обнаружения малоразмерных (малозаметных) БпЛА и НСУ, особенно в сложных природных (погодных) условиях (полная темнота, дождь, туман и т.д.) их применения, возможностью осуществления полета на малой (предельно-малой) высоте в том числе в режиме радиомолчания, а также широким использованием радиопрозрачных (пластиковых и композитных) материалов в конструкции и применением малошумящих двигателей, и воздушных винтов;
3. Ограниченные возможности по получению информации (данных) о ПРК БпЛА (пространственно-временных характеристик, параметров сигналов и др.) для осуществления эффективного их обнаружения и идентификации.
Наиболее близким по своей технической сущности к заявляемому способу является способ обнаружения малоразмерных БпЛА [Шишков С.В. Метод обнаружения малогабаритных беспилотных летательных аппаратов. - Патент на изобретение №2559332, 25.02.2014], заключающийся в приеме и формировании трех и более изображений и сигналов в трех и более пространственно-разнесенных точках на гиростабилизированных платформах, связанных между собой рабочими базами, автоматически определяющими расстояния между собой и свои пространственные координаты, работающих в оптическом (камеры кругового обзора), акустическом и в трех и более настраиваемых радиолокационных диапазонах электромагнитных волн, управление работой трех каналов и обработкой полученной информации и сигналов осуществляет электронно-вычислительная машина (ЭВМ) с элементами искусственного интеллекта (ИИ), которая сама выбирает наиболее эффективные каналы для более точного обнаружения и определения пространственных координат БпЛА в различных условиях ведения наблюдения и т.д.
Данный прототип имеет следующие недостатки:
1. Ограничения, связанные с невозможностью динамического изменения базы между датчиками разведки при их размещении в трех и более пространственно-разнесенных точках на гиростабилизированных платформах как на подвижных (нелетающих) объектах, так и на стационарных в городской застройке, на пересеченной, лесистой или горной местности (т.е. в кратчайшие (оперативные) сроки перемещение данных датчиков потребует дополнительные время, силы и ресурс) для уменьшения времени и увеличения дальности обнаружения БпЛА с требуемой точностью.
2. Малая дальность обнаружения БпЛА и его НСУ, связанна с недостаточной высотой подъема данных датчиков разведки в следствии чего не обеспечение требуемой дальности прямой видимости, с применением только оптического (камеры кругового обзора), радиолокационного и акустического диапазонов длин волн, что обуславливает непосредственную зависимость от природных (погодных) условий (полная темнота, дождь, туман и т.д), возможностью осуществления полета на малой высоте и широкое использование радиопрозрачных (пластиковых и композитных) материалов в конструкции, а также применение малошумящих двигателей и воздушных винтов);
3. Ограниченные функциональные возможности в реализации метода обнаружения и идентификации более одного БпЛА, так как не предусматривается возможность определения их пространственно-временных характеристик (дистанций между БпЛА, порядка построения ПРК, предполагаемой цели (задачи) применения и т.д.), а также используемой ими системы сотовой связи (ССтС) для канала управления и передачи данных (КУПД).
Техническим результатом данного изобретения является решение задач связанных с повышение возможностей по:
1. Упрощению способа (прототипа) обнаружения БпЛА (НСУ)/ПРК БпЛА путем сокращения количества приемных пространственно-разнесенных точек данной системы датчиков на земле до одной;
2. Увеличению дальности обнаружения БпЛА (НСУ)/ПРК БпЛА, а также увеличению точности или уменьшению среднеквадратической ошибки (СКО) при определении местоположения БпЛА (НСУ)/ПРК БпЛА в диапазоне, равном 360 град, в горизонтальной (определение азимутального пеленга на БпЛА/ПРК БпЛА) и от 0 до 180 град, в вертикальной плоскостях (определение угломестного пеленга и высоты полета БпЛА (НСУ)/ПРК БпЛА), за счет комплексирования (многократного приема и измерения) различных сигналов от искомых БпЛА (НСУ)/ПРК БпЛА в настраиваемых оптическом (пассивная оптико-электронная система (ОЭС), лазерный дальномер (ЛД)), акустическом (акустическая системы (АС)), радио (радиопеленгаторное устройство (РпУ), ложная базовая станция (ЛБС)) и в трех и более радиолокационных (активная радиолокационная станция (АРС)) диапазонах электромагнитных волн в зависимости от различных пространственных и энергетических его/их характеристики и их размещения в не менее чем в двух точках в воздухе на летно-подъемных платформах (ЛПП) выше уровня земли с возможностью динамического изменения (оперативного перемещения данных датчиков) баз (расстояний) между ними как в вертикальной, так и в горизонтальной плоскостях [Сосулин Ю.Г. Теоретические основы радиолокации и радионавигации. - М.: Радио и связь, 1992.-304 с.];
3. Реализации функции идентификации БпЛА/ПРК БпЛА в условиях плохой видимости, связанных с природными (погодными) условиями (полная темнота, дождь, туман и т.д.), при полете на малой высоте и широкое использование радиопрозрачных (пластиковых и композитных) материалов в конструкции, а также при применении малошумящих двигателей и воздушных винтов, в части распознавания более одного БпЛА, съема его/их координат на основе вскрытия протоколов при передаче данных с БпЛА на его/их НСУ и/или другой БпЛА в составе ГТРК, в том числе и при использовании ими ССтС, а также возможности определения других характеристик (дистанции между БпЛА, порядка построения ГТРК, предполагаемой цели их применения и т.д.) и применяемой им/ими информационно-управляющей системы (ИУС) (оптической, радио и т.п.) с помощью ЭВМ с элементами ИИ и базой данных (БД) содержащей маркеры контрольных сигналов, таких как различные структуры радиосигналов (протоколов), параметров импульсов, отраженных от воздушных винтов БпЛА, изображения БпЛА в трехмерной системе координат и т.п., которая сама комплексирует результаты полученной информации с данных датчиков, для обнаружения, идентификации, расчета пространственно-временных характеристик, выбора способа/способов и комплекта требуемых датчиков разведки для обнаружения и идентификации БпЛА (НСУ)ПРК БпЛА.
При одиночном или комбинированном применении датчиков разведки (РпУ, ЛБС, ОЭС, ЛД, АРС, АС) с целью выбора способа/способов и комплекта датчиков разведки для обнаружения и идентификации БпЛА (НСУ)ПРК БпЛА.
Поставленные задачи решаются следующим образом.
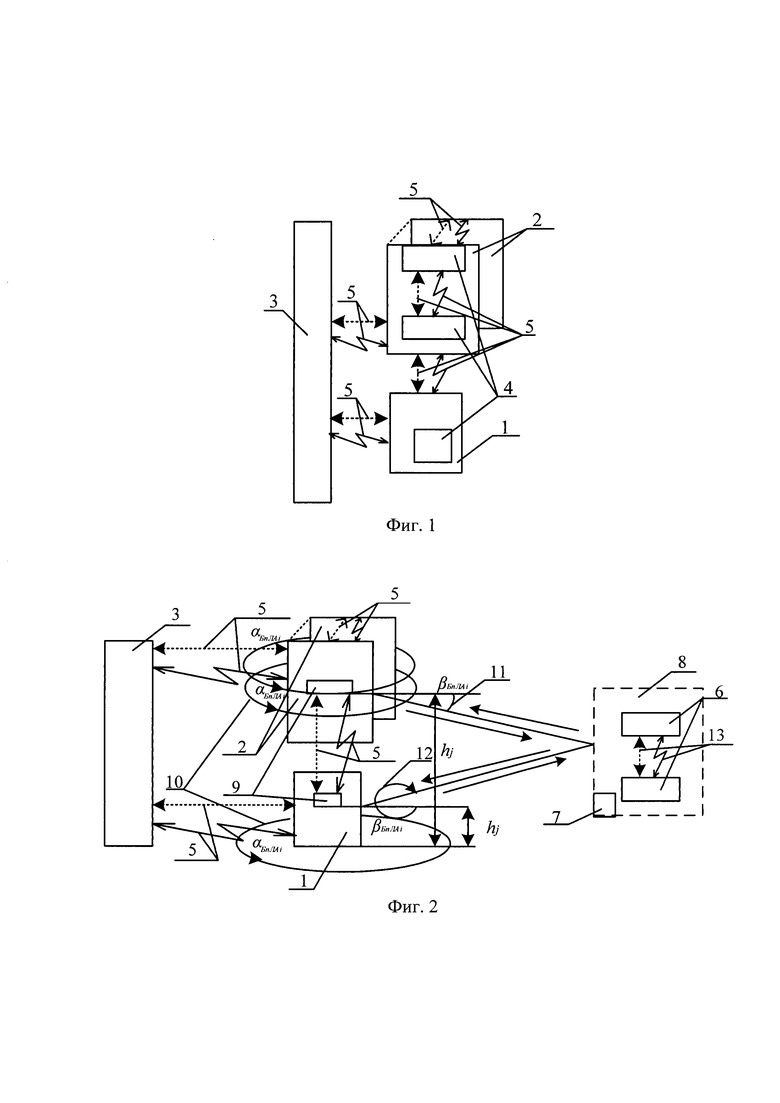
Способ обнаружения и идентификации БпЛА (НСУ)/ПРК БпЛА заключается в приеме сигналов в одной точке на удобном объекте, как на стационарном, так и на подвижном, находящемся на уровне земли (датчики приема сигнала от БпЛА на гиростабилизированной (ГС) платформе) 1 и в не менее, чем в двух точках в воздухе выше уровня земли (датчики на ЛПП) 2 с различным количеством датчиков разведки (РпУ, ЛБС, ОЭС, ЛД, АРС и АС), обработка полученной информации осуществляется на ЭВМ с элементами ИИ и БД 3, пространственно-временная информация о местоположении датчиков разведки (РпУ, ЛБС, ОЭС, ЛД, АРС и АС) определяется автоматически с помощью приемников глобальных навигационных спутниковых систем и различных датчиков (акселерометр, гироскоп, барометр и т.п.) 4, связь между датчиками на ЛПП 2 в воздухе выше уровня земли, на объекте на уровне земли 1 и ЭВМ с ИИ и БД 3 осуществляется по локальной и/или радиосети, функционирующей в единой системе времени 5 (фиг. 1).
Увеличение дальности обнаружения БпЛА 6 (НСУ 7) /ПРК БпЛА 8, достигается за счет размещения не менее двух точек данной системы датчиков разведки (РпУ, ЛБС, ОЭС, ЛД, АРС и АС) в воздухе на ЛПП 2 выше уровня земли, так как высота применения данных датчиков разведки влияет на дальность прямой видимости при измерении сигналов в различных диапазонах длин волн от искомых БпЛА 6 (НСУ 7) /ПРК БпЛА 8 [Руководство по определению дальности видимости на ВПП (RVR) РД 52.21.680 - 2006 // Москва. АНО «Метеоагентство Росгидромета». С.98]. Уменьшение СКО при определении местоположения БпЛА 6 (НСУ 7) /ПРК БпЛА 8, достигается за счет возможности изменения баз (расстояний) в динамике между датчиками разведки (РпУ, ЛБС, ОЭС, ЛД, АРС и АС) и их комплексирования, размещенными на ЛПП 2 в воздухе выше уровня земли [Сосулин Ю.Г. Теоретические основы радиолокации и радионавигации. - М.: Радио и связь, 1992. - 304 с, Трифонов П.А., Доан Т.Т., Ахмад Н.Н. Оценка точности местоопределения разностно-дальномерным методом источников сверхширокополосных сигналов при наличии помех // ВЕСТНИК ВГУ. СЕРИЯ: ФИЗИКА. МАТЕМАТИКА. 2023 №2, Соколов С.В., Погорелов В.А., Манин А.А., Ломтатидзе К.Т. Разностно-дальномерный метод определения координат радиомаяка с использованием беспилотных летательных аппаратов // АВТОМЕТРИЯ. 2022 Т. 58, №1], т.е. за счет осуществления перемещения ЛПП 2 в пространстве в требуемые позиции для снятия требуемого количества измерений, а также более точного обнаружения, идентификации и определения пространственных координат БпЛА 6 (НСУ 7) /ПРК БпЛА 8 в различных условиях ведения разведки и т.д., расчет требуемых позиций (пространственно-временных параметров), производит ЭВМ с элементами ИИ и БД 3, которая сама комплексирует результаты полученной информации с данных датчиков.
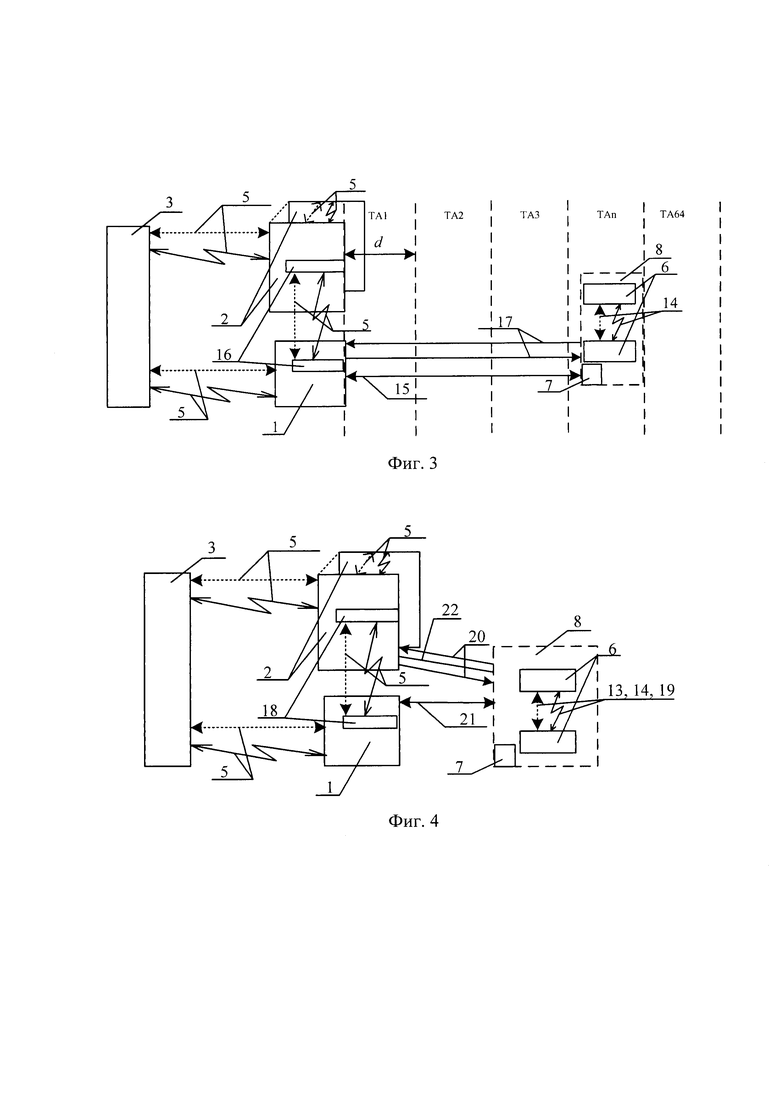
При ограничениях, связанных с плохой видимостью, полетом БпЛА 6 (НСУ 7) /ПРК БпЛА 8 на малой высоте и при широком использовании радиопрозрачных (пластиковых и композитных) материалов в конструкции, а также при применении малошумящих двигателей и воздушных винтов обнаружение и идентификация БпЛА 6 (НСУ 7) /ПРК БпЛА 8 осуществляется с помощью радиопеленгаторных устройств 9, размещенных в одной точке на удобном объекте, как на стационарном, так и на подвижном, находящемся на уровне земли 1, и на не менее, чем в двух точках на ЛПП 2 в воздухе выше уровня земли, которые в условиях данных ограничений способны определять пеленги в диапазонах, равных 360 град. в горизонтальной  10 и от 0 до 180 град, в вертикальной плоскостях
10 и от 0 до 180 град, в вертикальной плоскостях  11, 12 относительно высот поднятия приемных устройств hj, (где j - номер РпУ 9, которые могут находится как на любом удобном объекте на уровне земли при максимально возможном их поднятии, так и на ЛПП в воздухе выше уровня земли, i - номер обнаруженного БпЛА), а также вскрывать КУПД 13 между i-ым БпЛА 6 в составе ПРК 8 и/или НСУ 7 и по ним уже определять протоколы, применяемые в системе связи БпЛА 6 (НСУ 7) /ПРК БпЛА 8, которые находятся в электромагнитной доступности РпУ. Расчет координат местоположения БпЛА 6 (НСУ 7) /ПРК БпЛА 8 осуществляется угломерным способом [Грешилов А.А. Определение координат источника радиоизлучения // Инженерный журнал: наука и инновации, 2013, вып. 12] по определенным пеленгам 10, 11 и/или 12 (фиг. 2), и/или методом съема его/их координат на основе вскрытия протоколов передачи данных с БпЛА 6 на его/их НСУ 7 и/или другой БпЛА в составе ПРК 8, в также в случае невозможности определения данных пеленгов, разностно-дальномерным методом [Трифонов П.А., Доан Т.Т., Ахмад Н.Н. Оценка точности местоопределения разностно-дальномерным методом источников сверхширокополосных сигналов при наличии помех // ВЕСТНИК ВГУ. СЕРИЯ: ФИЗИКА. МАТЕМАТИКА. 2023 №2, Соколов С.В., Погорелов В.А., Манин А.А., Ломтатидзе К.Т. Разностно-дальномерный метод определения координат радиомаяка с использованием беспилотных летательных аппаратов // АВТОМЕТРИЯ. 2022 Т. 58, №1] с помощью ЭВМ с элементами ИИ и БД 3, которая сама комплексирует результаты полученной информации с данных датчиков, связь между датчиками на ЛПП 2 в воздухе выше уровня земли, на объекте на уровне земли 1 и ЭВМ с элементами ИИ и БД 3 осуществляется по локальной и/или радио сети функционирующей в единой системе времени 5 (фиг. 2).
11, 12 относительно высот поднятия приемных устройств hj, (где j - номер РпУ 9, которые могут находится как на любом удобном объекте на уровне земли при максимально возможном их поднятии, так и на ЛПП в воздухе выше уровня земли, i - номер обнаруженного БпЛА), а также вскрывать КУПД 13 между i-ым БпЛА 6 в составе ПРК 8 и/или НСУ 7 и по ним уже определять протоколы, применяемые в системе связи БпЛА 6 (НСУ 7) /ПРК БпЛА 8, которые находятся в электромагнитной доступности РпУ. Расчет координат местоположения БпЛА 6 (НСУ 7) /ПРК БпЛА 8 осуществляется угломерным способом [Грешилов А.А. Определение координат источника радиоизлучения // Инженерный журнал: наука и инновации, 2013, вып. 12] по определенным пеленгам 10, 11 и/или 12 (фиг. 2), и/или методом съема его/их координат на основе вскрытия протоколов передачи данных с БпЛА 6 на его/их НСУ 7 и/или другой БпЛА в составе ПРК 8, в также в случае невозможности определения данных пеленгов, разностно-дальномерным методом [Трифонов П.А., Доан Т.Т., Ахмад Н.Н. Оценка точности местоопределения разностно-дальномерным методом источников сверхширокополосных сигналов при наличии помех // ВЕСТНИК ВГУ. СЕРИЯ: ФИЗИКА. МАТЕМАТИКА. 2023 №2, Соколов С.В., Погорелов В.А., Манин А.А., Ломтатидзе К.Т. Разностно-дальномерный метод определения координат радиомаяка с использованием беспилотных летательных аппаратов // АВТОМЕТРИЯ. 2022 Т. 58, №1] с помощью ЭВМ с элементами ИИ и БД 3, которая сама комплексирует результаты полученной информации с данных датчиков, связь между датчиками на ЛПП 2 в воздухе выше уровня земли, на объекте на уровне земли 1 и ЭВМ с элементами ИИ и БД 3 осуществляется по локальной и/или радио сети функционирующей в единой системе времени 5 (фиг. 2).
Идентификационными признаками ПРК БпЛА 8 будут служить вскрытие более одного КУПД 13 в радиодиапазоне, определение пеленга/пеленгов на него/их выше точки относительно уровня земли в вертикальной плоскости  >0 град., 11, 12 динамики перемещения его/их пространственно-временных характеристик при их корреляции с картой местности и матрицей высот при вскрытии протоколов передачи данных между БпЛА 6 и его НСУ 7 и/или другого БпЛА в составе ПРК 8 с помощью ЭВМ с элементами ИИ и БД 3, которая сама комплексирует результаты полученной информации с данной системы датчиков разведки.
>0 град., 11, 12 динамики перемещения его/их пространственно-временных характеристик при их корреляции с картой местности и матрицей высот при вскрытии протоколов передачи данных между БпЛА 6 и его НСУ 7 и/или другого БпЛА в составе ПРК 8 с помощью ЭВМ с элементами ИИ и БД 3, которая сама комплексирует результаты полученной информации с данной системы датчиков разведки.
Обнаружение (вскрытие) и идентификация КУПД 14, применяемых на БпЛА 6 (НСУ 7) /ПРК БпЛА 8, реализованных с помощью ССтС, а также расчет дальности DAT 15 от точки отсчета (местоположение ЛБС 16) до БпЛА 6 (НСУ 7)/ПРК БпЛА 8 возможно с помощью ЛБС 16, размещенной/размещенных в одной точке на удобном объекте, как на стационарном, так и на подвижном, находящемся на уровне земли 1 и/или на одной ЛПП 2, находящейся в воздухе выше уровня земли, которая регистрирует абонентские терминалы ATi, в нашем случае БпЛА 6 (НСУ 7) /ПРК БпЛА 8 и которые в свою очередь связаны между собой по ССтС 14, находящегося/находящихся в его электромагнитной доступности, обменивается с ним/ними служебными сообщениями и по полученным от него/их данным сообщениям с информацией, содержащей значения параметра TAki (Timing Advance) 17, (где k - номер пространственного интервала, в котором находится/находятся i-ый БпЛА 6 (НСУ 7) и/или БпЛА в составе ПРК 8 TAki∈(1, 64)), которые являются временной задержкой сигнала/сигналов от БпЛА 6 (НСУ 7) и/или БпЛА в составе ПРК 8 до ЛБС 16, по формуле DAT=TAki⋅d (где - d=1… 553,5 м - погрешность измерения пространственного интервала TAki) (фиг. 3). Расчет координат местоположения БпЛА 6 (НСУ 7)/ПРК БпЛА 8 осуществляется угломерно-дальномерным и/или угломерно-разностно-дальномерным методом [Руководство по определению дальности видимости на ВПП (RVR) РД 52.21.680 - 2006 // Москва. АНО «Метеоагентство Росгидромета». С.98] по одному из определенных пеленгов ( 10, 11 и/или 12 на БпЛА 6 (НСУ 7)/ПРК БпЛА 8 (фиг. 2)) и дальности/дальностям DAT 15 до этого/этих же БпЛА 6 (НСУ 7)/ПРК БпЛА 8 (фиг. 3) с помощью ЭВМ с элементами ИИ и БД 3, которая сама комплексирует результаты полученной информации с данных датчиков, связь между датчиками на ЛПП 2 в воздухе выше уровня земли, на объекте на уровне земли и ЭВМ 1 с элементами ИИ и БД 3 осуществляется по локальной и/или радиосети, функционирующей в единой системе времени 5 (фиг. 3).
Идентификационными признаками ПРК БпЛА будут служить вскрытие более одного КУПД 14 в радио диапазоне, использующих различные стандарты ССтС (2G, 3G, 4G, 5G) в одном направлении и динамика перемещения пространственно-временных характеристик (координат) БпЛА 6 при их корреляции с картой местности и матрицей высот.
Определение расстояния и обнаружение БпЛА 6 (НСУ 7) /ПРК БпЛА 8 возможно также с помощью ЛД 18 размещенного/размещенных в одной точке на удобном объекте, как на стационарном, так и на подвижном, находящемся на уровне земли 1 и/или на одной ЛПП 2, находящейся в воздухе выше уровня земли, следующим образом. После определения пеленга/пеленгов ( 10,
10,  11 и/или 12 на БпЛА 6 (НСУ 7)/ПРК БпЛА 8, с помощью РпУ 9 (фиг. 2)) на БпЛА 6 (НСУ 7)/ПРК БпЛА 8, связанных между собой по различным каналам связи (оптическим 19, радио 13, 14 и т.п.), осуществляется подсвечивание лазерным лучом/лучами 20 в данном направлении и по отраженному лазерному сигналу определяется дальность/дальности
11 и/или 12 на БпЛА 6 (НСУ 7)/ПРК БпЛА 8, с помощью РпУ 9 (фиг. 2)) на БпЛА 6 (НСУ 7)/ПРК БпЛА 8, связанных между собой по различным каналам связи (оптическим 19, радио 13, 14 и т.п.), осуществляется подсвечивание лазерным лучом/лучами 20 в данном направлении и по отраженному лазерному сигналу определяется дальность/дальности  21 до БпЛА 6 (НСУ 7)/ПРК БпЛА 8 по формуле
21 до БпЛА 6 (НСУ 7)/ПРК БпЛА 8 по формуле  (где Ti - время прохождения сигнала от ЛД 19 до i-ого БпЛА 6 (НСУ 7) и/или БпЛА в составе ПРК 8) (фиг. 4). Расчет координат местоположения БпЛА 6 (НСУ 7)/ПРК БпЛА 8 осуществляется угломерно-дальномерным и/или угломерно-разностно-дальномерным методом [Баженов А.В., Захаренко Г.И., Бережнов А.Н., Савченко К.Ю. Радионавигационные системы // Учебное пособие // Ставрополь. Издание училища 2007] по одному из определенных пеленгов (
(где Ti - время прохождения сигнала от ЛД 19 до i-ого БпЛА 6 (НСУ 7) и/или БпЛА в составе ПРК 8) (фиг. 4). Расчет координат местоположения БпЛА 6 (НСУ 7)/ПРК БпЛА 8 осуществляется угломерно-дальномерным и/или угломерно-разностно-дальномерным методом [Баженов А.В., Захаренко Г.И., Бережнов А.Н., Савченко К.Ю. Радионавигационные системы // Учебное пособие // Ставрополь. Издание училища 2007] по одному из определенных пеленгов ( 10,
10,  11 и/или 12 на БпЛА 6 (НСУ 7)/ПРК БпЛА 8 (фиг. 2)) и дальности/дальностям
11 и/или 12 на БпЛА 6 (НСУ 7)/ПРК БпЛА 8 (фиг. 2)) и дальности/дальностям  21 до этого/этих же БпЛА 6 (НСУ 7) /ПРК БпЛА 8 (фиг. 3) с помощью ЭВМ с элементами ИИ и БД 3, которая сама комплексирует результаты полученной информации с данных датчиков, связь между датчиками на ЛПП 2 в воздухе выше уровня земли, на объекте на уровне земли 1 и ЭВМ с элементами ИИ и БД 3 осуществляется по локальной и/или радиосети, функционирующей в единой системе времени 5 (фиг. 4).
21 до этого/этих же БпЛА 6 (НСУ 7) /ПРК БпЛА 8 (фиг. 3) с помощью ЭВМ с элементами ИИ и БД 3, которая сама комплексирует результаты полученной информации с данных датчиков, связь между датчиками на ЛПП 2 в воздухе выше уровня земли, на объекте на уровне земли 1 и ЭВМ с элементами ИИ и БД 3 осуществляется по локальной и/или радиосети, функционирующей в единой системе времени 5 (фиг. 4).
Повышение информативности достигается путем комплексированого измерения параметров импульсов сигналов 22, отраженных от воздушных винтов БпЛА 6, с целью определения изменения спектра принимаемых сигналов вызванных доплеровской сдвижкой частот, образующихся при вращении лопастей воздушных винтов БпЛА 6. Анализ параметров импульсов отраженных сигналов 22 проводит ЭВМ с элементами ИИ и БД 3, которая сама комплексирует полученные результаты и сравнивает их с аналогичными импульсами контрольных (находящихся в БД), после чего осуществляется идентификация по принадлежности к определенному классу, типу, модели и т.п. БпЛА 6 (НСУ 7)/ПРК БпЛА 8.
В случае недостаточной информативности для выбора способа/способов и комплекта требуемых датчиков разведки для обнаружения и идентификации БпЛА 6 (НСУ 7) /ПРК БпЛА 8 данные датчики разведки (РпУ, ЛБС, ОЭС, ЛД, АРС, АС) применяются комбинированным способом, порядок включения и управления которыми осуществляет ЭВМ с элементами ИИ и БД, которая сама комплексирует результаты полученной информации с данных датчиков для обнаружения, идентификации, расчета пространственно-временных характеристик, выбора способа/способов и комплекта требуемых датчиков разведки для обнаружения и идентификации 6 (НСУ 7)/ПРК БпЛА 8 (фиг. 1).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система наблюдения и противодействия беспилотным летательным аппаратам | 2020 |
|
RU2738508C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2619915C1 |
| СПОСОБ СКРЫТИЯ ОПТИКО-ЭЛЕКТРОННОГО СРЕДСТВА ВОЗДУШНОГО КОМПЛЕКСА ОПТИКО-ЭЛЕКТРОННОГО НАБЛЮДЕНИЯ | 2022 |
|
RU2792921C1 |
| Способ обнаружения объектов на земной поверхности | 2021 |
|
RU2766924C1 |
| Многофункциональный комплекс средств обнаружения, сопровождения и радиопротиводействия применению беспилотных летательных аппаратов малого класса | 2020 |
|
RU2769037C2 |
| СПОСОБ ПРОТИВОДЕЙСТВИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТАМ, СОВЕРШАЮЩИМ ПЕРЕДАЧУ ИНФОРМАЦИИ НА НАЗЕМНЫЙ ПУНКТ ПРИЕМА | 2023 |
|
RU2819415C1 |
| ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА БЕСПИЛОТНОГО САМОЛЕТА-ИСТРЕБИТЕЛЯ | 2010 |
|
RU2418267C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ РАКЕТЫ | 2023 |
|
RU2826814C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы беспилотного летательного аппарата малой дальности с использованием интеллектуальной системы геопространственной информации | 2019 |
|
RU2722599C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НЕПОДВИЖНЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПРИ ОДНОКООРДИНАТНОЙ ПЕЛЕНГАЦИИ В СВЯЗАННОЙ СИСТЕМЕ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2834277C1 |
Использование: изобретение относится к области обнаружения и идентификации беспилотных летательных аппаратов (БпЛА), в том числе их наземных станций управления (НСУ), а также применяемых в составе пространственно-распределенного комплекса (ПРК) (далее по тексту - БпЛА (НСУ)/ПРК БпЛА). Сущность: в заявленном способе применяются различные датчики разведки, находящиеся в нескольких точках, одна на уровне земли и в не менее чем в двух точках данной системы датчиков на летно-подъемных платформах (ЛПП) в воздухе выше уровня земли. Пространственно-временная информация об их местоположении определяется автоматически с помощью приемников глобальных навигационных спутниковых систем и датчиков (акселерометр, гироскоп, барометр и т.п.). Обнаружение и идентификация БпЛА/ПРК БпЛА осуществляется с помощью комбинированной системы в виде следующих датчиков разведки: радиопеленгаторного устройства (РпУ); ложной базовой станции (ЛБС); пассивной оптико-электронной системы (ОЭС); лазерного дальномера (ЛД); активной радиолокационной станции (АРС); акустической системы (АС) - расположенных как на уровне земли, так и выше уровни земли. Управление работой, выбором необходимого количества требуемых датчиков разведки и обработкой полученной информации от них осуществляет электронно-вычислительная машина с элементами искусственного интеллекта и базой данных, которая сама вычисляет тип, пространственно-временные характеристики БпЛА/ПРК БпЛА, применяемую им/ими информационно-управляющею систему и динамику их изменения для дальнейшего определения способа/способов и комплекта датчиков разведки для обнаружения и идентификации БпЛА/ПРК БпЛА. Технический результат: повышение эффективности обнаружения и идентификации БпЛА/ПРК БпЛА при одиночном и/или комбинированном применении датчиков разведки (РпУ, ЛБС, ОЭС, ЛД, АРС и АС). Повышение эффективности прототипа достигается за счет комплексированной обработки полученной информации о сигналах БпЛА с применением дополнительно базы данных, содержащей маркеры контрольных сигналов, таких как различные структуры радиосигналов (протоколов), параметры импульсов, отраженных от воздушных винтов БпЛА, изображение БпЛА в трехмерной системе координат и т.п., и размещения комбинированной системы датчиков разведки (РпУ, ЛБС, ОЭС, ЛД, АРС и АС) в одной точке на уровне земли и в не менее чем в двух точках на ЛПП в воздухе выше уровня земли с целью выбора способа/способов и комплекта датчиков разведки для обнаружения и идентификации с БпЛА/ПРК БпЛА. 4 ил.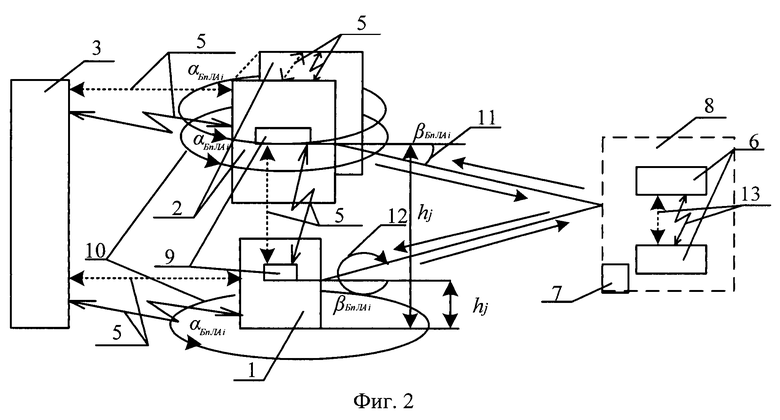
Комбинированный способ обнаружения и идентификации беспилотных летательных аппаратов, заключающийся в приеме и формировании трех и более изображений и сигналов в трех и более пространственно разнесенных точках на гиростабилизированных платформах, связанных между собой рабочими базами, автоматически определяющими расстояния между собой и свои пространственные координаты, работающих в оптическом, акустическом и в трех и более настраиваемых радиолокационных диапазонах электромагнитных волн, управление работой трех каналов и обработкой полученной информации и сигналов осуществляет ЭВМ с элементами искусственного интеллекта, которая сама выбирает наиболее эффективные каналы для более точного обнаружения и определения пространственных координат беспилотных летательных аппаратов в различных условиях ведения наблюдения, отличающийся тем, что
при обнаружении и идентификации беспилотных летательных аппаратов их наземных станций управления и/или пространственно-распределенного комплекса беспилотных летательных аппаратов применяется комплексированная обработка полученной информации о сигналах беспилотных летательных аппаратов с применением дополнительно базы данных, содержащей маркеры контрольных сигналов, таких как различные структуры радиосигналов, протоколов, параметров импульсов, отраженных от воздушных винтов беспилотных летательных аппаратов, изображение беспилотных летательных аппаратов в трехмерной системе координат,
прием сигналов осуществляется от беспилотных летательных аппаратов, и/или их наземных станций управления, и/или пространственно-распределенного комплекса беспилотных летательных аппаратов в настраиваемом диапазоне электромагнитных волн в одной точке, размещенной на земле, и в не менее чем в двух точках, размещенных в воздухе на летно-подъемных платформах, автоматически определяющими расстояния между собой и свои координаты с возможностью динамического их изменения, проводя требуемое количество измерений, в не менее двух пространственно-измененных позициях, принимаемых сигналов от беспилотных летательных аппаратов, и/или их наземных станций управления, и/или пространственно-распределенного комплекса беспилотных летательных аппаратов, связанных между собой по радио и/или оптическому диапазону электромагнитных волн, управление работой и обработкой полученной информации об их сигналах осуществляют с помощью ЭВМ с элементами искусственного интеллекта и базой данной, которая сама комплексирует результаты полученной информации с данных датчиков для обнаружения, идентификации, расчета пространственно-временных характеристик, выбора способа/способов и комплекта датчиков разведки для обнаружения и идентификации беспилотных летательных аппаратов, и/или их наземных станций управления, и/или пространственно-распределенного комплекса беспилотных летательных аппаратов.
| МЕТОД ОБНАРУЖЕНИЯ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2559332C1 |
| US 6389333 B1, 14.05.2002 | |||
| Акустический способ обнаружения беспилотных летательных аппаратов | 2020 |
|
RU2749651C1 |
| Способ противодействия беспилотным летательным аппаратам | 2020 |
|
RU2743401C1 |
| Система и способ обнаружения и противодействия беспилотным летательным аппаратам | 2019 |
|
RU2755603C2 |
| Способ обнаружения пропеллерных беспилотных летательных аппаратов | 2023 |
|
RU2801201C1 |

