Изобретение относится к радиотехнике, а именно к радиолокации, и может быть использовано при построении радиолокационной станции с многоканальной положительной обратной связью.
Известен тип радиолокационных станций (РЛС), работающих на основе пространственной обратной связи [Тенкин В.А., Винокуров В.И., Калениченко С.П., Попов В.Н., Щербак В.И. Морская радиолокация / Под ред. В.И. Винокурова. Изд. «Судостроение», 1986, с.199]. Основным преимуществом таких станций является высокая энергетическая и информационная скрытность их работы, поскольку при отсутствии целей в зоне обзора излучаются маломощные собственные шумы системы, а нарастание мощности происходит только при появлении цели в просматриваемом элементе дистанции. С точки зрения физических процессов, протекающих в системе, такие радиолокационные станции могут быть представлены в виде автогенератора с задержанной положительной обратной связью. Автоколебания в такой системе могут возникать на частотах fn, кратных величине, обратной задержке сигнала T: fn=n/Т, где n=1,2,… Если полоса фильтра Δf в цепи обратной связи превышает величину 1/T, выполнение баланса фаз гарантировано. При наличии цели с достаточной эффективной площадью рассеяния (ЭПР) и компенсации потерь на трассе распространения сигнала за счет усиления в приемо-передающем тракте радиолокатора выполняется условие баланса амплитуд, результирующий коэффициент усиления в петле обратной связи KOC>1 и в замкнутой системе «РЛС - пространство - цель», возникают экспоненциально нарастающие автоколебания. Для измерения и разрешения целей но дальности в РЛС с пространственной обратной связью используется модуляция узкополосного шума на выходе фильтра и последующая корреляционная обработка сигнала в приемнике. Недостатком такой РЛС является последовательный просмотр каналов по дальности, что при большом их количестве существенно замедляет темп обзора пространства.
Наиболее близкой по совокупности существенных признаков к предлагаемой РЛС является радиолокационная станция с положительной обратной связью через цель, описанная в патенте на полезную модель №113018. Данная станция построена по многоканальной схеме измерения дальности и содержит параллельные каналы обработки сигналов по дальности (КОСД). Распараллеливание каналов и обработка сигналов осуществляются в цифровом виде, для чего в схему PJIC введены аналого-цифровой преобразователь (АЦП), мультиплексор (М), сумматор (Сум) и цифроаналоговый преобразователь (ЦАП). Каждый капал обработки сигналов по дальности содержит последовательно включенные фильтры сжатия, накопительные узконолосные фильтры с одинаковыми частотами настройки и полосами пропускания, выравнивающие линии задержки (JI3), временные селекторы, выполняющие роль импульсных формирователей, и фильтры растяжения сигналов.
При наличии единственной цели в зоне обзора РЛС физические процессы, протекающие в такой системе, по-прежнему можно описать с помощью модели автогенератора с задержанной обратной связью. При появлении нескольких целей в различных каналах дальности такая РЛС становится эквивалентной автогенератору с многопетлевой задержанной обратной связью. Как известно, возникающие автоколебания в такой системе носят сложный характер, так как происходит взаимный энергетический обмен между отдельными петлями обратной связи [Яковлев В.П. Генераторы с многопетлевой обратной связью. - М.: Связь, 1973]. За счет взаимного влияния автоколебаний в нетлях обратной связи баланс фаз и амплитуд не может быть выполнен независимо в отдельном дальностном канале даже при формировании фильтрами растяжения ортогональных сигналов. Это является основным недостатком данной схемы построения РЛС с положительной обратной связью, поскольку делает непредсказуемыми и неуправляемыми величины вероятностей правильного обнаружения и ложных тревог, что, в конечном счете, не позволяет гарантировать надежное разрешение целей и однозначное измерение их дальностей.
Задачей, решаемой изобретением, является обеспечение независимого многоканального обнаружения целей но дальности в радиолокационной станции с положительной обратной связью за счет формирования частотно-независимых каналов пространственного самовозбуждения через пространство и цели.
Поставленная задача решается за счет того, что предлагаемая РЛС с положительной обратной связью, так же как и известная, содержит К каналов обработки сигналов по дальности, входы которых соединены с блоком приема сигналов через последовательное соединение аналого-цифрового преобразователя и мультиплексора, а выходы подключены к сумматору, соединенному через цифроаналоговый преобразователь с блоком передачи сигналов, при этом каждый канал содержит линию задержки и фильтр. Но, в отличие от известной, на входе каждого канала установлен коррелятор, соединенный с входом линии задержки, выход которого соединен с входом фильтра, а на выходе каждого канала установлен модулятор, вход которою соединен с выходом фильтра, выходы каждого фильтра дополнительно подсоединены ко входам решающего устройства, выходы которого соединены со вторыми входами фильтров, и введено кодирующее устройство, выход которого подсоединен ко вторым входам модуляторов, а выходы, соответствующие задержанным копиям модулирующего сигнала, ко вторым входам корреляторов, причем в качестве фильтров использованы узкополосные фильтры с одинаковыми полосами пропускания и неповторяющимися частотами настройки, эквидистантно распределенными по рабочему частотному диапазону радиолокационной станции.
Техническим результатом, достигаемым изобретением, является увеличение вероятности правильного обнаружения цели и уменьшение вероятности ложных тревог за счет исключения взаимного влияния автоколебаний в дальномерных каналах.
Изобретение поясняется чертежом, на котором представлена обобщенная структурная схема предлагаемой радиолокационной станции с многоканальной положительной обратной связью. Предлагаемая РЛС состоит из блока приема 1 (БПРМ), аналого-цифрового преобразователя 2 (АЦП), преобразующего сигнал в цифровую форму, мультиплексора 3 (МП), в котором сигнал распараллеливается на К каналов обработки сигналов по дальности 4 (КОСД), сумматора 5 (Сум), на выходе которого формируется многополосный шумоподобный сигнал Х(t), ширина спектра которого определяется как КΔF, цифроаналогового преобразователя 6 (ЦАП), где сигнал преобразуется в аналоговую форму, блока передачи 7 (БПРД), кодирующего устройства 8 (КУ), в котором генерируется модулирующий сигнал z(t) и его копии, задержанные на τk, и решающего устройства 9 (РУ), которое прерывает процесс нарастания автоколебаний в k-м канале дальности при обнаружении в нем цели. Каждый канал обработки сигналов по дальности 4 (КОСД) настроен на обработку сигналов с соответствующей задержкой τk и содержит коррелятор 10 (К), выравнивающий линию задержки 11 (ЛЗ), величина Tk которой выбирается из условия τk+Tk=T=const, узкополосный фильтр 12 (Ф) и модулятор 13 (М), в котором формируется шумоподобный сигнал xk(t), полоса которого имеет ширину ΔF>>Δf, необходимую для обеспечения разрешения целей по дальности. Причем узкополосный фильтр 12 (Ф) с шириной полосы пропускания Δf=1/Т настроен на частоту самовозбуждения k-го канала дальности fk=nk/T, а расстояние между частотами настройки фильтров 12 выбирается исходя из условия fk+1-fk=ΔF, где ΔF - ширина спектра модулированного сигнала самовозбуждения в пространстве.
Физические процессы, протекающие в РЛС с многоканальной положительной обратной связью, можно описать с помощью ряда независимо функционирующих однопетлевых автогенераторов с задержанной обратной связью, каждый из которых работает на своей частоте возбуждения. Следовательно, при обнаружении целей в различных каналах дальности взаимное влияние сигналов автоколебаний будет практически отсутствовать.
При появлении цели в просматриваемом элементе дальности переотраженный целью многополосный шумовой сигнал X(t) поступает на вход блока приема 1 и, далее, на вход аналого-цифрового преобразователя 2. Оцифрованный сигнал поступает на вход мультиплексора 3, в котором входной сигнал разделяется на К параллельных сигналов, которые поступают на К частотно-независимых каналов обработки сигналов по дальности 4. Каждый канал обработки сигналов 4 настроен на определенную дальность. Это достигается, во-первых, за счет подачи с соответствующего выхода кодирующего устройства 8 на второй вход коррелятора 10 демодулирующего сигнала z(t-τk) с фиксированной для данного канала дальности задержкой τk и, во-вторых, настройкой фильтров 12 на индивидуальную частоту самовозбуждения k-гo канала дальности fk. Включение в каждый канал обработки сигналов но дальности 4 выравнивающих линий задержки 11 с индивидуальным временем Tk, обеспечивающим выполнение условия τk+Tk=1/Δf, гарантирует выполнение баланса фаз в каждом канале дальности, а частотный разнос настройки соседних фильтров 12 более чем на ΔF гарантирует отсутствие влияния процессов самовозбуждения в соседних каналах дальности. В случае совпадения задержек отраженного Х(t-τ) и опорного z(t-τk) сигналов (τ=τk) в корреляторе 10 осуществляется свертка сигнала в частотной области, в результате соответствующая составляющая xk(t) многополосного шумоподобного сигнала Х(t) преобразуется в узкополосный шум полосой Δf на несущей частоте fk, энергия которого попадает в соответствующий узкополосный фильтр 12. Спектральные компоненты узкополосного шума, для которых выполняется баланс фаз, складываются когерентно, что приводит к их нарастанию на выходе фильтра. Далее выходной сигнал фильтра 12 поступает на модулятор 13, в котором происходит расширение спектра сигнала до величины ΔF. На второй и последующих пространственных циркуляциях шумоподобного сигнала модуляции подвергаются нарастающие автоколебания xk(t) соответствующего канала дальности. Выходные сигналы параллельных каналов обработки сигналов но дальности 4 поступают на сумматор 5, где формируется многополосный сигнал X(t), который далее преобразуется в цифроаналоговом преобразователе 6 и излучается в пространство блоком передачи 7.
Для выполнения баланса амплитуд необходимо, чтобы суммарный коэффициент усиления в петле обратной связи КОС>1. Это эквивалентно условию компенсации потерь на трассе распространения сигнала соответствующим усилением в приемо-передающем тракте РЛС. Коэффициент усиления РЛС с положительной обратной связью КРЛС=Ризл/Рпр>1, где Ризл - выходная мощность, излучаемая в пространство передающим блоком, Рпр - мощность собственных шумов приемного блока в полосе Δf. На основе известного уравнения радиолокации [Радиотехнические системы / Под ред. Ю.М. Казаринова. - Изд. «Академия», 2008] КРЛС можно записать в виде:
где Rk - дальность до цели в k-м канале; γ - ослабление мощности сигнала на трассе распространения; G1 и G2 - коэффициент усиления передающей и приемной антенн соответственно; λ - длина волны несущего колебания, σ - эффективная площадь рассеяния цели. При этом предполагается, что все каскады приемо-передающего тракта в момент возникновения и нарастания автоколебаний согласованы но уровню входных и выходных шумов и работают в линейном режиме.
Выполнение баланса фаз и амплитуд в k-м канале дальности приводит к появлению экспоненциально нарастающих автоколебаний в полосе пропускания соответствующего фильтра 12. При обнаружении нарастающих автоколебаний в k-м канале обработки сигналов по дальности 4, являющихся признаком наличия цели, решающее устройство 9 (РУ) вырабатывает сигнал разряда узкополосного фильтра 12, принудительно прерывающий автоколебания в этом канале, что гарантирует работу блоков РЛС в линейном режиме. При этом время анализа возникающих автоколебаний во всех К каналах дальности Ta должно быть согласовано с суммарным временем задержки Т. Как правило, на практике достаточным для надежного возникновения автоколебаний и их обнаружения является Ta=10…30 Т.
При наличии целей и выполнения баланса амплитуд в нескольких каналах дальности нарастающие автоколебания могут возникать независимо на разных частотах и фиксироваться решающим устройством 9 в соответствующих каналах дальности, что обеспечит многоканальное обнаружение целей с заданными характеристиками. При этом спектры сигналов возникающих автоколебаний практически не перекрываются, что обеспечивает независимость процессов нарастания автоколебаний в пределах линейного динамического диапазона блоков РЛС. При обнаружении цели в k-м канале дальности решающее устройство 9 вырабатывает сигнал разряда соответствующего узкополосного фильтра 12. Для параллельного анализа всех каналов дальности и принятия решения о наличие целей отводится время анализа Ta>>T, после чего узкополосные фильтры 12 синхронно разряжаются по сигналу решающего устройства 9, и начинается новый цикл обзора пространства.
Работа устройства доказывает достижение технического результата, а именно позволяет при многоканальном параллельном обзоре пространства увеличить вероятность правильного обнаружения целей и уменьшить вероятность ложных тревог за счет исключения взаимного влияния автоколебаний в дальномерных каналах.
Изобретение относится к радиотехнике, а именно к радиолокации, и может быть использовано при построении радиолокационной станции с многоканальной положительной обратной связью. Достигаемый технический результат - увеличение вероятности правильного обнаружения цели и уменьшение вероятности ложных тревог за счет исключения взаимного влияния автоколебаний в дальномерных каналах. Указанный результат достигается за счет того, что радиолокационная станция (РЛС) с многоканальной положительной обратной связью содержит блок приема сигналов, аналого-цифровой преобразователь, мультиплексор, сумматор, цифроаналоговый преобразователь, блок передачи сигналов, К каналов обработки сигналов по дальности, при этом каждый канал содержит коррелятор, линию задержки, фильтр, модулятор, РЛС также содержит решающее устройство, кодирующее устройство. Перечисленные средства определенным образом выполнены и соединены между собой. 1 ил.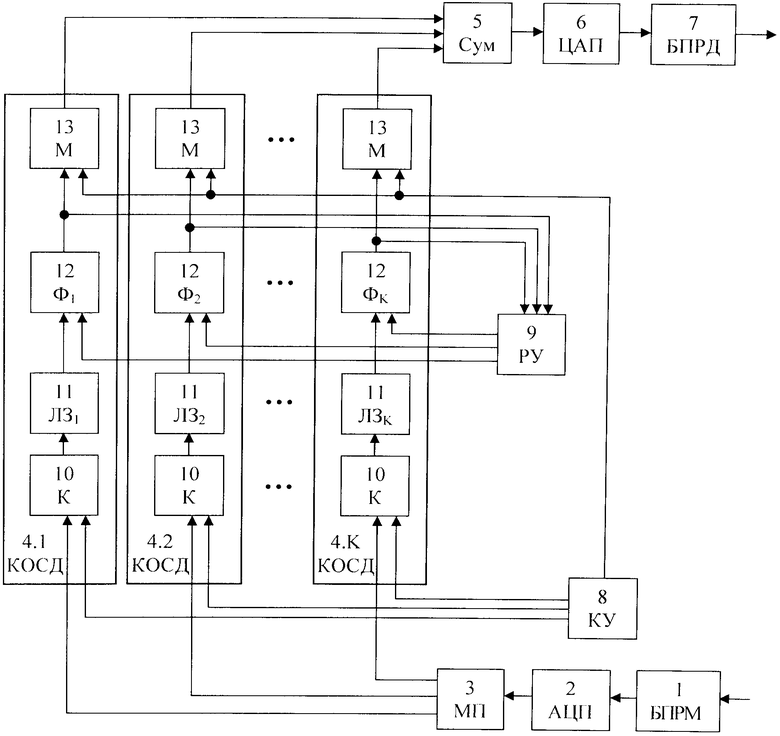
Радиолокационная станция с положительной обратной связью, содержащая К каналов обработки сигналов по дальности, входы которых соединены с блоком приема сигналов через последовательное соединение аналого-цифрового преобразователя и мультиплексора, а выходы подключены к сумматору, соединенному через цифроаналоговый преобразователь с блоком передачи сигналов, при этом каждый канал содержит линию задержки и фильтр, отличающаяся тем, что на входе каждого канала установлен коррелятор, соединенный с входом линии задержки, выход которой соединен с входом фильтра, а на выходе каждого канала установлен модулятор, вход которого соединен с выходом фильтра, выходы каждого фильтра дополнительно подсоединены к входам решающего устройства, выходы которого соединены со вторыми входами фильтров, и введено кодирующее устройство, выход которого подсоединен ко вторым входам модуляторов, а выходы, соответствующие задержанным копиям модулирующего сигнала, ко вторым входам корреляторов, причем в качестве фильтров использованы узкополосные фильтры с одинаковыми полосами пропускания и неповторяющимися частотами настройки, эквидистантно распределенными по рабочему частотному диапазону радиолокационной станции.
| ВЫСОКОЙ ТЕМПЕРАТУРЫ | 0 |
|
SU113018A1 |
| Привод для нагнетателей авиационных моторов | 1939 |
|
SU58727A1 |
| RU 94025062 A1, 20.05.1996 | |||
| РАДИОЛОКАЦИОННЫЙ УРОВНЕМЕР | 2012 |
|
RU2518373C1 |
| US 5387918 A, 07.02.1995 | |||
| EP 1312891 A2, 21.05.2003 | |||
| WO 2006061913 A1, 15.06.2006 | |||
| US 6731236 B1, 04.05.2004 | |||

