Предлагаемое изобретение относится к области радиолокации и предназначено для использования в радиолокационных станциях (РЛС) с доплеровским передатчиком, а также в специфических следящих системах.
В настоящее время известны различные способы радиолокации с радиолокаторами с доплеровскими передатчиками, а также радиолокаторы для их реализации, однако они обладают недостаточной точностью и надежностью измерений, имеют достаточно сложные схемы их реализации, в которых используется достаточно дорогое оборудование.
Основным отличием и особенностью предлагаемого способа радиолокации, от известных в настоящее время способов радиолокации, является то, что в данном способе радиолокатор работает на постоянной частоте.
Так, известна РЛС, содержащая передатчик ЧМ-сигнала, передающую антенну, приемник ЧМ-сигнала, отраженного от цели сигнала с усилителем, АЦП, процессор, осуществляющий преобразование время/частота, и соединенное с ним устройство управления [патент США №5972223, МКИ G01S 13/34].
Недостатком данной РЛС является недостаточная дальность действия.
Известен также радиолокатор для измерения малых расстояний до объекта, содержащий параллельно соединенные приемную антенну, смеситель, первый фильтр нижних частот и усилитель-ограничитель, а также последовательно соединенные СВЧ-генератор, управляемый по частоте напряжением, направленный ответвитель, передающую антену, преобразователь частота-напряжение и измеритель высоты с переменной шкалой, а также усилитель с автоматической регулировкой усиления, первую и вторую логическую схему И, первый и второй счетчики числа импульсов, а также цифровой сумматор [заявка РФ ИЗ №94037470, МПК G01S 13/34].
В данном радиолокаторе повышена точность и надежность измерения малых расстояний до объекта, но он обладает большей дальностью действия.
Наиболее близкими к данному изобретению по технической сущности являются способ сопровождения цели и устройство моноимпульсной РЛС, реализующей данный способ по патенту РФ на ИЗ №2338219, МПК G01S 13/44, выбранные в качестве прототипа.
В данном способе сопровождения цели после квадратурно-фазового детектирования суммарных и разностных сигналов производится подавление видеочастот, где априорно отсутствует сдвинутый на доплеровскую частоту сигнал цели (зеркальных видеочастот). Подавление происходит за счет пропускания квадратур входного видеосигнала через соответствующие фазосдвигающие цепи с единичным усилением, фазочастотные характеристики которых в рабочем диапазоне частот имеют сдвиг относительно друг друга 90 град., и суммирования полученных сигналов.
Моноимпульсная РЛС, реализующая данный способ, содержит антенную моноимпульсную систему, первый вход-выход которой соединен со вторым входом-выходом антенного переключателя, возбудитель, квадратурно-фазовые детекторы суммарного и разностного каналов, синхронизатор, передатчик, соединенный с антенным переключателем, последовательно соединенные формирователь модулированного сигнала, формирователь опорного сигнала, и бортовую вычислительную машину.
В данном способе и устройстве обеспечена возможность слежения как за сигналом цели, так и за шумовым источником помех при одновременном повышении потенциала радиолокации по сигналу цели за счет подавления на видеочастоте зеркальной шумовой полосы, однако данные способ и устройство не обеспечивают достаточной дальности действия РЛС, достаточной помехозащищенности, и точности измерения текущих координат и параметров.
Технической задачей предложенного изобретения является создание такого способа радиолокации и радиолокатора с доплеровским передатчиком для его реализации, в котором была бы значительно увеличена его дальность действия, повышены помехозащищенность и точность измерения текущих координат и параметров, исключена возможность разведки структуры зондирующего сигнала, при существенном упрощении схемы радиолокатора и соответствующим снижении объема оборудования и его стоимости.
Поставленная техническая задача достигается за счет того, что в способе радиолокации, предусматривающем формирование передатчиком зондирующего сигнала с частотой f0, излучение антенной данного зондирующего сигнала, прием антенной входного, отраженного от цели сигнала с частотой f0+fД, усиление данного входного сигнала, сначала производят преобразование частоты f0+fД отраженного от цели сигнала в первом преобразователе, ко второму входу которого подают постоянно с эталона частоты сигнал с частотой f0, при этом первый преобразователь преобразует частоту входного сигнала, и формирует сигнал с частотой f0+fД-f0; то есть сигнал с частотой fД, который поступает на первый вход второго преобразователя, ко второму входу которого подают постоянно с эталона частоты сигнал с частотой f0, во втором преобразователе производят преобразование входящего сигнала с частотой fД в выходящий сигнал с частотой f0-fД, который направляют в передатчик, а затем в антенну для передачи его в качестве зондирующего сигнала с частотой f0-fД, после чего происходит непрерывное поддержание равенства частот 
Предпочтительно, чтобы в способе радиолокации производили формирование передатчиком зондирующего сигнала с частотой f0, меняющейся по линейному закону в пределах всего доплеровского диапазона частот.
Поставленная техническая задача предложенного изобретения достигается за счет того, что радиолокатор с доплеровским передатчиком, реализующий способ, содержит антенну, вход-выход которой подключен к входу-выходу антенного переключателя, вход которого подключен к выходу передатчика, а выход соединен с входом приемника, имеет, по меньшей мере, первый и второй преобразователи, соединенные последовательно с приемником, эталон частоты, выход которого подключен ко второму входу первого преобразователя, и ко второму входу второго преобразователя, схема поиска и электронный ключ, выполненный с возможностью подключения входа передатчика к выходу второго преобразователя, или выходу схемы поиска, вход которой подключен к выходу приемника и первому входу первого преобразователя, первый выход которого подключен к первому входу второго преобразователя.
Предпочтительно, чтобы радиолокатор содержал фильтр и усилитель, соединенные последовательно, каждый из преобразователей был снабжен перемножителем и фильтром, соединенными последовательно, а передатчик имел усилитель.
В предпочтительном варианте в радиолокаторе приемник содержит фильтр и усилитель, каждый из преобразователей снабжен фильтром и перемножителем, а передатчик имеет усилитель.
В предпочтительном и практически реализуемом варианте, с новой структурой зондирующих сигналов -PN MSK, радиолокатор с доплеровским передатчиком снабжен генератором случайных комбинаций (ГСК), синхронизатором с памятью, первый вход которого подключен к выходу генератора случайных комбинаций (ГСК), преселектором, квадратором и каналом обнаружения, включенными последовательно между антенным переключателем и приемником, выход которого через последовательно соединенные фильтр и детектор, которые представляют собой формирователь корреляционных максимумов, подключен к первому входу вычислительного средства, второй и третий входы которого подключены ко вторым выходам первого и второго преобразователей, а четвертый вход вычислительного средства подключен к входу схемы поиска и каналу обнаружения, при этом передатчик снабжен модулятором ПСП сигналов, первый вход которого подключен к выходу синхронизатора, второй вход подключен к выходу электронного ключа, а выход модулятора ПСП сигналов подключен к входу усилителя передатчика, канал обнаружения содержит первый сумматор, две параллельно подключенные между ним и приемником цепочки из первого узкополосного фильтра и первого детектора, а также из второго узкополосного фильтра и второго детектора, подключенные выходами детекторов к первому и второму входам первого сумматора, при этом приемник имеет два делителя частоты, схему задержки, второй сумматор и несколько перемножителей, выполненных с возможностью согласования НЧД с ПСП, и подключенных между схемой задержки и вторым сумматором таким образом, что выходы перемножителей приемника подключены к входам второго сумматора, выход которого подключен к входу фильтра, первые входы перемножителей приемника подключены к выходам схемы задержки, а вторые входы перемножителей приемника подключены к первым выходам делителей частоты, входы которых подключены к первым входам первого и второго преобразователей, первый из которых дополнительно содержит цепочку из последовательно соединенных второго перемножителя и второго фильтра, а второй также дополнительно содержит цепочку из последовательно соединенных второго перемножителя и второго фильтра, при этом первый и второй выходы эталона частоты подключены ко вторым входам вторых перемножителей первого и второго преобразователей, а выходы фильтров первого и второго преобразователей подключены к входам вторых перемножителей первого и второго преобразователей и ко второму и третьему входам вычислительного средства.
Защищаемая новизна способа радиолокации и радиолокатора с доплеровским передатчиком для его реализации заключается в компенсации доплеровского смещения частоты отраженного от цели сигнала путем изменения частоты зондирующего сигнала передатчика строго на текущую величину доплеровского смещения частоты отраженного сигнала, но с обратным знаком
Для более полного раскрытия изобретения далее приводится описание конкретных возможных вариантов его исполнения с соответствующими чертежами.
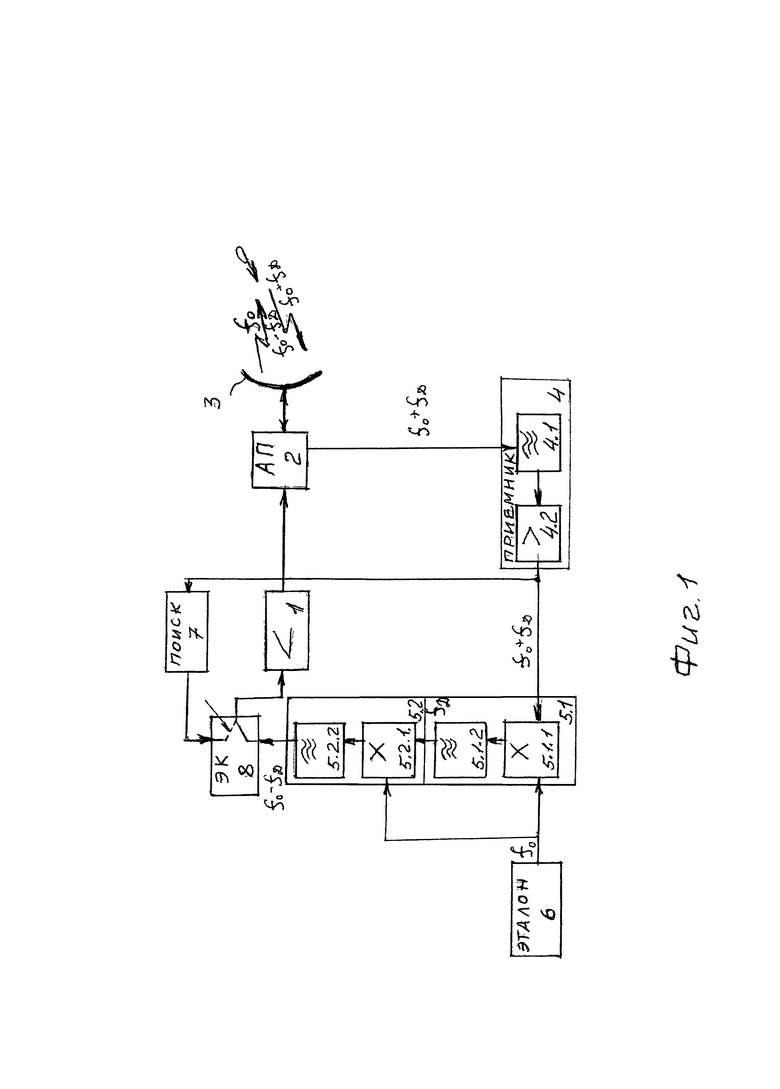
Фиг.1 - структурная схема радиолокатора с доплеровским передатчиком, поясняющая способ радиолокации.
Фиг.2 - структурная схема радиолокатора с доплеровским передатчиком с использованием PN MSK сигналов.
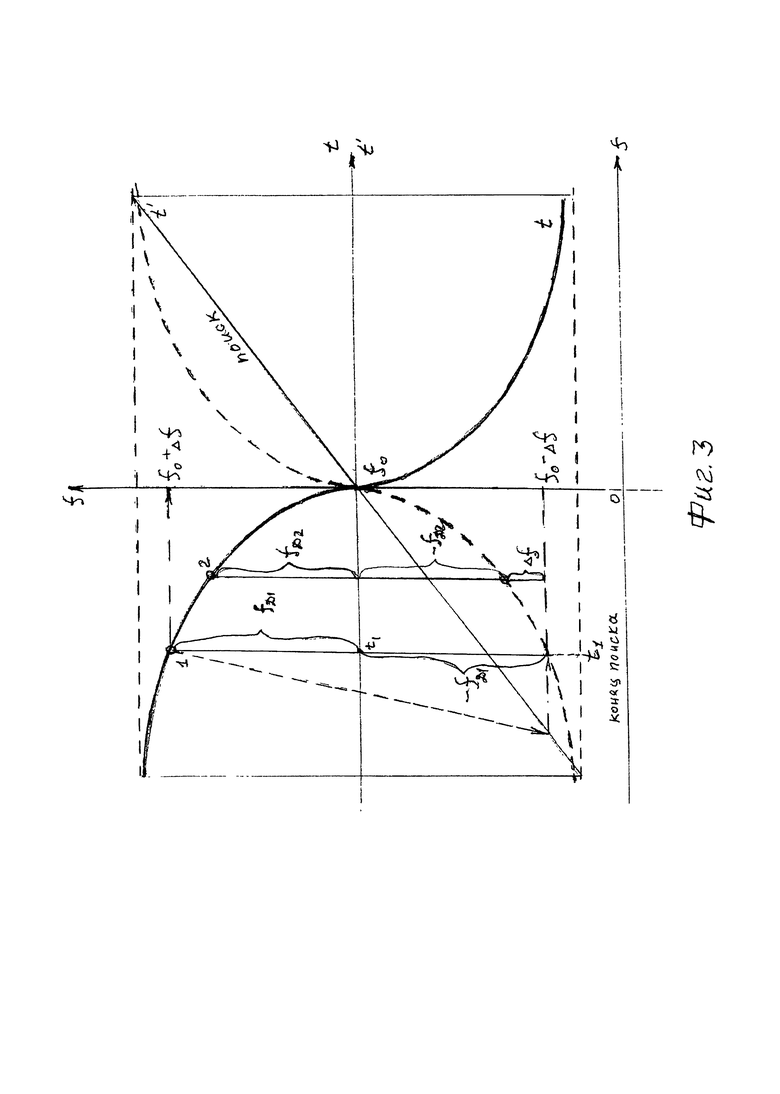
Фиг.3 - структура изменения частот (доплеровской и компенсирующей).
Фиг.4 - структура PN MSK сигнала.
Фиг.5 - квадрированный спектр PN MSK сигнала.
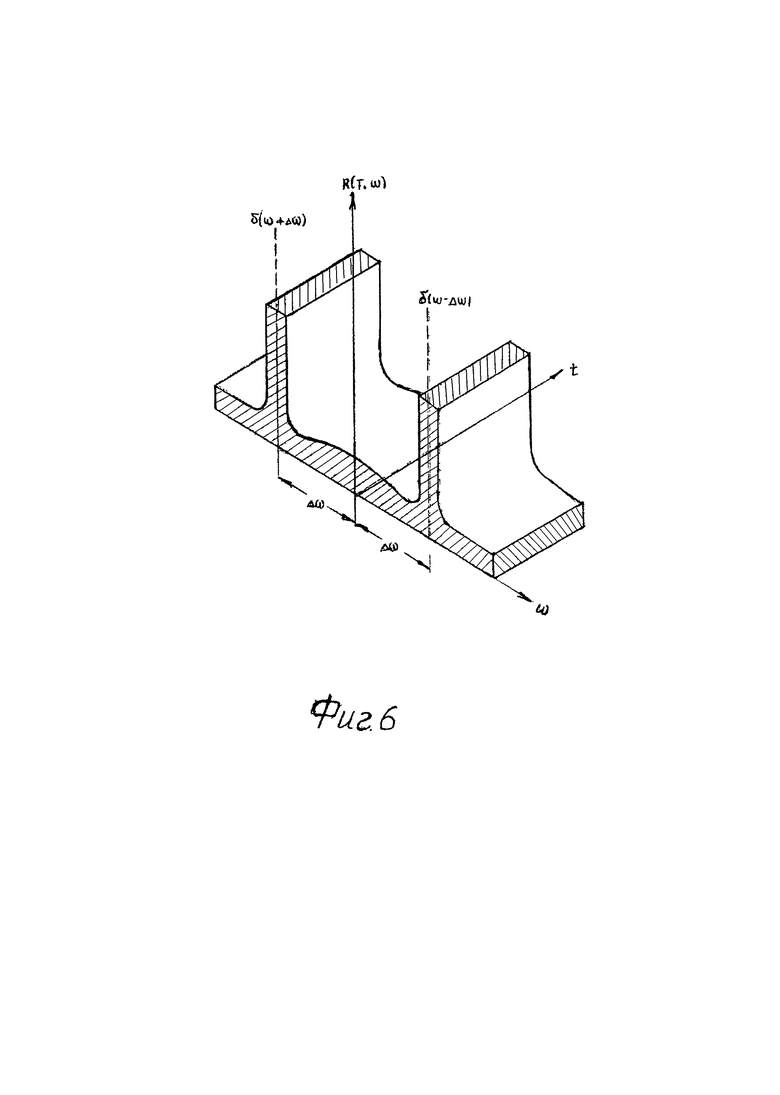
Фиг.6 - изометрическая проекция PN MSK сигнала.
Радиолокатор с доплеровским передатчиком, реализующий данный способ радиолокации, содержит передатчик 1, который может иметь усилитель 1.2 (Фиг.1). Выход передатчика 1 соединен с входом антенного переключателя 2, вход-выход которого подключен к входу-выходу антенны 3, а выход антенного переключателя 2 подключен к входу приемника 4, который может содержать фильтр 4.1 и выпрямитель 4.2, выход которого подключен к первому входу первого преобразователя 5.1, второй вход которого подключен к выходу эталона частоты 6, выход которого подключен ко второму входу второго преобразователя 5.2, первый вход которого подключен к выходу первого преобразователя 5.1. Выход второго преобразователя 5.2 подключен к входу электронного ключа 8, второй вход которого подключен к выходу схемы поиска 7, вход которой подключен к выходу приемника 4 и первому входу первого преобразователя 5.1, а выход электронного ключа 8 подключен к входу передатчика 1. При этом первый преобразователь 5.1 имеет перемножитель 5.1.1 и фильтр 5.1.2, а второй преобразователь 5.2 имеет перемножитель 5.2.1 и фильтр 5.2.2.
Способ радиолокации поясняется на примере работы представленного выше радиолокатора с доплеровским передатчиком.
В исходном состоянии схема поиска 7 вырабатывает сигнал с частотой f0, меняющейся по линейному закону в пределах всего доплеровского диапазона частот (Фиг.1). Этот сигнал с выхода схемы поиска 7 через электронный ключ 8 поступает на вход передатчика 1. Там происходит его усиление, и через антенный переключатель 2 он поступает в антенну 3 и излучается. При появлении цели, в пределах диаграммы направленности антенны 3, наступает момент, когда отраженный от цели сигнал с частотой f0+fД принимается антенной 3, и с ее выхода, через антенный переключатель 2 попадает на вход приемника 4, усиливается в нем, и поступает на вход первого преобразователя 5.1, в котором производят преобразование частоты f0+fД отраженного от цели сигнала. В первом преобразователе 5.1, ко второму входу которого подают постоянно с эталона частоты 6 сигнал с частотой f0, преобразуют частоту входного сигнала, и формируют сигнал с частотой f0+fД-f0, то есть сигнал с частотой fД, который поступает на первый вход второго преобразователя 5.2, ко второму входу которого подают постоянно с эталона частоты 6 сигнал с частотой f0. Во втором преобразователе 5.2 производят преобразование входящего сигнала с частотой fД, в выходящий сигнал с частотой f0-fД, который направляют через электронный ключ 8 в передатчик 1, а затем через антенный переключатель 2 в антенну 3 для передачи его в качестве зондирующего сигнала, после чего происходит непрерывное поддержание равенства частот 
Мгновенное изменение частоты Доплера Δf (Фиг.3) компенсируется соответствующим изменением частоты передатчика 1, т.е. fд(t)=|-fд(t-T), где T - время прохождения излученного сигнала до цели и обратно.
Результатом организации такой замкнутой системной петли обратной связи является принудительная компенсация доплеровского смещения частоты, т.е. цель, от которой принят отраженный сигнал, «как бы перестает перемещаться» в пространстве по признаку отсутствия в ее сигнале доплеровского смещения частоты, и, как следствие, возникают условия работы узкополосного приемника на постоянной частоте f0.
Применение описанного выше способа позволяет:
- во-первых, реализовать потенциально предельный энергетический потенциал РЛС за счет сужения полосы пропускания приемника до теоретически минимальной (вместо суммарной, при которой полоса приемника должна быть расширена для учета динамической составляющей спектра во входном сигнале), т.е. энергия сигнала оказывается максимальной, а энергия шума минимальной, причем сохраняются все информационные свойства сигнала (динамическая составляющая спектра, порожденная движением цели, и проявляющаяся в доплеровском смещении частоты оказывается скомпенсированной);
- во-вторых, в спектральных и корреляционных преобразованиях Фурье возникают условия для существенного увеличения пределов интегрирования (накопления энергии сигнала), а следовательно, дополнительного повышения энергетических параметров радиолокатора (РЛС), т.к. на приведенной шкале времени ликвидируется «дефект времени», вызванный разными системами отсчета времени (частоты);
- в-третьих, такая компенсационная структура построения радиолокатора (РЛС) обеспечивает прием сигналов только от одной цели, т.к. сигналы, отраженные от всех других объектов (включая отражения от местных предметов подстилающей поверхности, пассивных и активных помех и прочих неподвижных и двигающихся объектов с частотой, отличной от компенсационной передатчика, не пройдут через узкополосный фильтр приемной системы;
- в-четвертых, не чувствительность приемника радиолокатора (РЛС) ко всем отраженным сигналам, за исключением одной сопровождаемой цели существенно разгрузит вычислительные и индикаторные средства радиолокатора (РЛС).
В описанном выше простейшем варианте радиолокатора (РЛС) не оговаривались структуры применяемых сигналов и ряд других деталей. Поэтому основной задачей простейшего представленного радиолокатора являлась проблема изложить новый способ доплеровской радиолокации, который может быть адаптирован для конкретных условий (наземные, корабельные, авиационные, космические и т.д.)
Второй вариант реализации радиолокатора с доплеровским передатчиком (Фиг.2), с перестройкой излучаемых передатчиком несущих, использующий новый структурный принцип, конкретизирован в части применения новых PN МСК сигналов (Pseudo Noise Minimum Shift Keying) широкополосных шумоподобных дискретных с минимальным сдвигом фаз и индексом манипуляции частот D=2ΔfTd=0,5. Их структура во временной и спектральной областях изображена на фиг.4, 5, а на фиг.6 изображена изометрическая проекция PN МСК сигнала. Эти сигналы по своему существу и свойствам значительно превосходят широко применяемые в настоящее время ФКМ, не говоря уже о таких устаревших, как AM, ЛЧМ и др. Основное их отличие и преимущество над известными сигналами заключается в том, что огибающие временной функции, огибающие спектра и корреляционной функции являются гладкими кривыми, не имеющими боковых лепестков фиг.4 и фиг.5 (при условии достаточно большого количества N, а практически когда максимальный уровень бокового лепестка будет не больше номинального уровня шума), следовательно, и функция неопределенности обладает единственным максимумом в центре плоскости.
Второй вариант реализации радиолокатора с доплеровским передатчиком (Фиг.2) содержит, дополнительно к первому варианту радиолокатора, синхронизатор 24 с памятью 23, первый вход которого подключен к выходу генератора случайных комбинаций (ГСК) 25, преселектор 9, квадратор 10 и канал обнаружения 4.1, включенные между антенным переключателем 2 и приемником 4, выход которого, через последовательно соединенные фильтр 21 и детектор 22, подключен к первому входу вычислительного средства 26, при этом последовательно соединенные фильтр 21 и детектор 22 представляют собой формирователь корреляционных максимумов. Второй и третий входы вычислительного средства 26 подключены ко вторым выходам первого 5.1 и второго 5.2 преобразователей, а четвертый вход вычислительного средства 26 подключен к входу схемы поиска 7, при этом передатчик 1 снабжен модулятором ПСП сигналов 1.1 и усилителем 1.2. Первый вход модулятора ПСП сигналов 1.1 подключен к выходу синхронизатора 24, второй вход подключен к выходу электронного ключа 8, а выход модулятора ПСП сигналов 1.1 подключен к входу усилителя передатчика 1.2. Канал обнаружения 4.1 содержит первый сумматор 15, две параллельно подключенные между ним и приемником цепочки из первого узкополосного фильтра 11 и первого детектора 13, а также из второго узкополосного фильтра 12 и второго детектора 14, подключенные к первому и второму входам первого сумматора 15.
Приемник 4 содержит схему задержки 18, второй сумматор 20, несколько перемножителей 19 (19-1,9-n, 19-n-1), выполненных с возможностью согласования НЧД с ПСП, и подключенных между схемой задержки 18 с отводами и вторым сумматором 20, а также два делителя частоты 16 и 17, подключенных выходами ко вторым входам перемножителей 19 приемника, а входами к первому 5.1 и второму 5.2 преобразователям, первый из которых дополнительно содержит цепочку из последовательно соединенных второго фильтра 5.1.3 и второго перемножителя 5.1.4, а второй дополнительно содержит цепочку из последовательно соединенных второго фильтра 5.2.3 и второго перемножителя 5.2.4.
Принцип работы второго варианта радиолокатора с доплеровским передатчиком, изображенного на фиг.2, аналогичен тому, который был описан для первого варианта радиолокатора с доплеровским передатчиком. Отличие состоит только в необходимости адаптировать упрощенный одноканальный и одночастотный вариант приемника 4, схему Фурье свертки во времени к двухчастотным PN MSK сигналам, а также в обеспечении зашиты нового принципа обнаружения квадрированного сигнала по всплескам спектра на удвоенных НЧД.
Отличительной особенностью второго варианта радиолокатора с доплеровским передатчиком является структура канала обнаружения 4.1, в которой при квадрировании (удвоении) частоты сигнала в структуре PN MSK сигнала появляются регулярные составляющие спектра, что теоретически приводит к появлению в нем компонент, в которых сосредоточено 50% энергии входного сигнала (Фиг.4).
Используя это свойство для обнаружения сигнала существенно понижается порог чувствительности и резко возрастает отношение с/ш, не учитываемое в стандартных технических расчетах. Однако отсутствие явной зависимости амплитуды остаточных боковых лепестков в выражении спектра от количества дискретов заставляет налагать дополнительное условие: чтобы максимальная амплитуда бокового лепестка спектра не превосходила минимального уровня шума.
Защита структуры (комбинаторики ПСП) зондирующего сигнала производится путем использования ГСК 25, основу которого составляет генератор шума, поэтому даже разработчик аппаратуры не может предугадать структуру очередной комбинации ПСП.
Готовность к работе Фурье свертки во времени в течение всей посылки обеспечивается схемой памяти 23 в составе синхронизатора 24.
Как очевидно специалистам в данной области техники, данное изобретение легко разработать в других конкретных формах, не выходя при этом за рамки сущности данного изобретения.
При этом настоящие варианты осуществления необходимо считать просто иллюстративными, а не ограничивающими, причем объем изобретения представлен его формулой, и предполагается, что в нее включены все возможные изменения и область эквивалентности пунктам формулы данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВОЙ ОБНАРУЖИТЕЛЬ С КОМПЕНСАЦИЕЙ ВАРИАЦИЙ МАГНИТНЫХ ПОЛЕЙ | 2019 |
|
RU2710363C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ БОРТОВЫМ ОБНАРУЖИТЕЛЕМ С КОМПЕНСАЦИЕЙ ВАРИАЦИЙ МАГНИТНЫХ ПОЛЕЙ | 2019 |
|
RU2709787C1 |
| ДВУХЧАСТОТНЫЙ КОГЕРЕНТНО-КОРРЕЛЯЦИОННЫЙ РАДИОЛОКАТОР | 2006 |
|
RU2332681C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| КВАЗИМОНОИМПУЛЬСНЫЙ ВТОРИЧНЫЙ РАДИОЛОКАТОР | 2016 |
|
RU2622399C1 |
| СПОСОБ ИМИТАЦИИ ЦЕЛИ И ЕЕ ИМИТАТОР В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ (ВАРИАНТЫ) | 2002 |
|
RU2234107C1 |
| РАДИОЛОКАТОР | 1984 |
|
SU1841061A1 |
| ДВУХВОЛНОВЫЙ АДАПТИВНЫЙ РАДИОЛОКАТОР | 2014 |
|
RU2599054C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| РАДИОЛОКАТОР СО СЖАТИЕМ СИГНАЛОВ | 1984 |
|
SU1840559A1 |


Изобретение относится к области радиолокации и предназначено для использования в радиолокационных станциях (РЛС) с доплеровским передатчиком, а также в специфических следящих системах. Достигаемый технический результат - увеличение дальности действия, повышение помехозащищенности и точности измерения текущих координат и параметров, исключение возможности разведки структуры зондирующего сигнала при существенном упрощении схемы радиолокатора и соответствующем снижении объема оборудования и его стоимости. Указанный результат достигается за счет того, что в способе радиолокации, предусматривающем формирование передатчиком зондирующего сигнала, излучение антенной данного зондирующего сигнала, прием отраженного от цели сигнала, преобразование частоты отраженного от цели сигнала в первом преобразователе, ко второму входу которого подают сигнал с эталона частоты, при этом сигнал с первого преобразователя поступает на вход второго преобразователя, ко второму входу которого подают сигнал с эталона частоты, во втором преобразователе производят преобразование входного сигнала в выходной сигнал, который направляют в передатчик, а затем в антенну для передачи его в качестве зондирующего сигнала, после чего замкнутой петлей обратной связи мгновенное изменение частоты доплера передатчика компенсируется соответствующим изменением частоты передатчика, в результате чего происходит замыкание системной петли обратной связи, образованной передатчиком, в котором управляют частотой его излучения. Указанный результат достигается также за счет того, что радиолокатор с доплеровским передатчиком, реализующий способ, содержит антенну, антенный переключатель, приемник, по меньшей мере, первый и второй преобразователи, эталон частоты, схему поиска и электронный ключ, выполненный с возможностью подключения входа передатчика к выходу второго преобразователя или выходу схемы поиска. Перечисленные средства определенным образом соединены между собой. 2 н. и 3 з.п. ф-лы, 6 ил.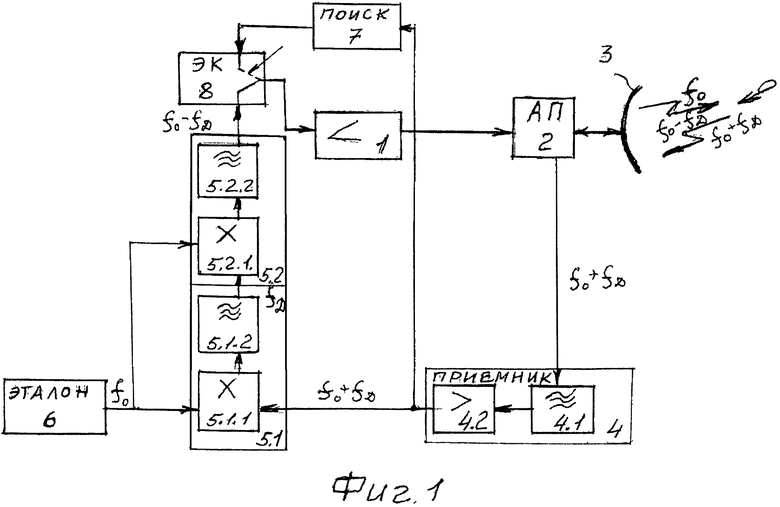
1. Способ радиолокации, предусматривающий формирование передатчиком зондирующего сигнала с частотой f0, излучение антенной данного зондирующего сигнала, прием антенной входного, отраженного от цели сигнала с частотой f0+fД, усиление данного входного сигнала, отличающийся тем, что сначала производят преобразование частоты f0+fД отраженного от цели сигнала в первом преобразователе, ко второму входу которого подают постоянно с эталона частоты сигнал с частотой f0, при этом первый преобразователь преобразует частоту входного сигнала и формирует сигнал с частотой f0+fД-f0, то есть сигнал с частотой fД, который поступает на первый вход второго преобразователя, ко второму входу которого подают постоянно с эталона частоты сигнал с частотой f0, во втором преобразователе производят преобразование входящего сигнала с частотой fД в выходящий сигнал с частотой f0-fД, который направляют в передатчик, а затем в антенну для передачи его в качестве зондирующего сигнала, после чего происходит непрерывное поддержание равенства частот fД=|-fД| замкнутой петлей системы, при котором мгновенное изменение частоты доплера передатчика Δf компенсируется соответствующим изменением частоты передатчика, в результате чего происходит замыкание системной петли обратной связи, образованной передатчиком, в котором управляют частотой его излучения.
2. Способ радиолокации по п.1, отличающийся тем, что производят формирование передатчиком зондирующего сигнала с частотой f0, меняющейся по линейному закону в пределах всего доплеровского диапазона частот.
3. Радиолокатор с доплеровским передатчиком, реализующий способ по п.1, содержащий антенну, вход-выход которой подключен к входу-выходу антенного переключателя, вход которого подключен к выходу передатчика, а выход соединен с входом приемника, отличающийся тем, что в него введены, по меньшей мере, первый и второй преобразователи, соединенные последовательно с приемником, эталон частоты, выход которого подключен ко второму входу первого преобразователя и ко второму входу второго преобразователя, схема поиска и электронный ключ, выполненный с возможностью подключения входа передатчика к выходу второго преобразователя или выходу схемы поиска, вход которой подключен к выходу приемника и первому входу первого преобразователя, первый выход которого подключен к первому входу второго преобразователя.
4. Радиолокатор с доплеровским передатчиком по п.3, отличающийся тем, что приемник содержит фильтр и усилитель, соединенные последовательно, каждый из преобразователей снабжен перемножителем и фильтром, соединенными последовательно, а передатчик имеет усилитель.
5. Радиолокатор с доплеровским передатчиком по п.4, отличающийся тем, что он снабжен генератором случайных комбинаций (ГСК), синхронизатором с памятью, первый вход которого подключен к выходу генератора случайных комбинаций (ГСК), преселектором, квадратором и каналом обнаружения, включенными последовательно между антенным переключателем и приемником, выход которого через последовательно соединенные фильтр и детектор, которые представляют собой формирователь корреляционных максимумов, подключен к первому входу вычислительного средства, второй и третий входы которого подключены ко вторым выходам первого и второго преобразователей, а четвертый вход вычислительного средства подключен к входу схемы поиска и каналу обнаружения, при этом передатчик снабжен модулятором ПСП сигналов, первый вход которого подключен к выходу синхронизатора, второй вход подключен к выходу электронного ключа, а выход модулятора ПСП сигналов подключен к входу усилителя передатчика, канал обнаружения содержит первый сумматор, две параллельно подключенные между ним и приемником цепочки из первого узкополосного фильтра и первого детектора, а также из второго узкополосного фильтра и второго детектора, подключенные выходами детекторов к первому и второму входам первого сумматора, при этом приемник имеет два делителя частоты, схему задержки, второй сумматор и несколько перемножителей, выполненных с возможностью согласования НЧД с ПСП и подключенных между схемой задержки и вторым сумматором таким образом, что выходы перемножителей приемника подключены к входам второго сумматора, выход которого подключен к входу фильтра, первые входы перемножителей приемника подключены к выходам схемы задержки, а вторые входы перемножителей приемника подключены к первым выходам делителей частоты, входы которых подключены к первым входам первого и второго преобразователей, первый из которых дополнительно содержит цепочку из последовательно соединенных второго перемножителя и второго фильтра, а второй также дополнительно содержит цепочку из последовательно соединенных второго перемножителя и второго фильтра, при этом первый и второй выходы эталона частоты подключены ко вторым входам вторых перемножителей первого и второго преобразователей, а выходы фильтров первого и второго преобразователей подключены к входам вторых перемножителей первого и второго преобразователей и ко второму и третьему входам вычислительного средства.
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| СПОСОБ ПОВЫШЕНИЯ ВЕРОЯТНОСТИ ОБНАРУЖЕНИЯ ЦЕЛЕЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С ВЫСОКОЙ ЧАСТОТОЙ ПОВТОРЕНИЯ | 2000 |
|
RU2185639C2 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ МОНОИМПУЛЬСНАЯ РЛС | 2011 |
|
RU2497146C2 |
| US 20120242536 A1, 27.09.2012 | |||
| JP 2001264426 A, 26.09.2001 | |||
| WO 2005066649 A2, 21.07.2005 | |||
| US 6229474 B1, 08.05.2001. | |||

