Настоящее изобретение относится к области навигационных систем, содержащих приемник спутниковых сигналов позиционирования, например приемник GPS.
В области навигационных систем и, в частности, навигационных систем, использующих значения псевдорасстояний, получаемые от спутниковой системы позиционирования, одной из основных проблем и постоянным источником ошибок позиционирования является управление и детектирование многолучевого непрямого распространения сигналов, связанного с
- отражением сигнала, излучаемого спутником, до достижения приемника;
- отсутствие приема прямого сигнала.
Кроме существенного искажения положения, рассчитанного приемником GPS, такие явления действительно влияют на достоверность положения, рассчитанного приемником GPS, поскольку они не обрабатываются и не учитываются обычно применяемыми механизмами проверки целостности.
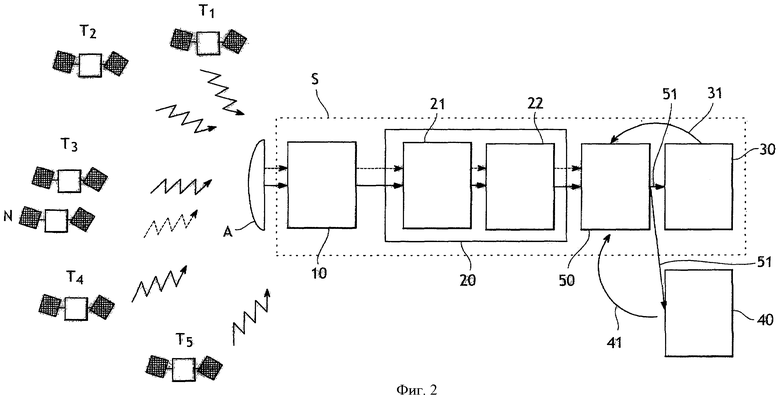
На фиг.1 показана принципиальная схема автономного контроля целостности приемника (или RAIM от "Receiver Autonomous Integrity Monitoring"), классически применяемая в приемнике GPS.
Приемник R оборудован антенной А, выполненной с возможностью приема сигналов GPS от множества спутников.
На фиг.1 для простоты показано только пять спутников T1-T5. Однако понятно, что для осуществления контроля RAIM необходимо рассматривать множество n спутников, где n, но меньшей мере, равно 5. На практике в среднем число спутников равно 8.
Приемник R содержит средства 10, предназначенные для вычисления для каждого сигнала GPS, поступающего от спутника T1-T5, отслеживаемого приемником, набора необработанных навигационных измерений (называемых также "raw GPS measurements"). Эти необработанные навигационные измерения обычно включают в себя псевдорасстояния, псевдоскорости, соответствующие показатели эффективности, - например, показатель UERE ("User Equivalent Range Error"), обозначающий погрешность измерения псевдорасстояния приемник-спутник, - а также соответствующее время измерения UTC ("Universal Time Coordinated").
Наборы необработанных навигационных данных направляются на модуль RAIM 20, который контролирует общую согласованность системы спутников, используя все необработанные измерения GPS, действительно полученные от вычислительных средств 10.
Модуль RAIM 20 обычно содержит два подмодуля 21, 22, соединенные последовательно.
Первый подмодуль 21 является детектором скачка, функция которого, как это определено гражданской авиационной нормой DO-229C, состоит в отклонении необработанных данных, для которых появляется скачок, более значительный, чем данное пороговое значение, по отношению к предыдущему дискретному значению.
Измерения, не отклоненные детектором 21 скачка, направляются во второй подмодуль 22, функция которого, как это определено гражданской авиационной нормой DO-229C, состоит в осуществлении детектирования и исключения ошибок. Подмодуль 22 (называемый также FDE от "Fault Detector & Exclusion") проверяет для этого общую согласованность наборов необработанных измерений и детектирует и/или исключает необработанные измерения, которые приводят к несогласованности в системе спутников.
Необработанные измерения, остающиеся в конце процесса RAIM (данные, не исключенные подмодулями 21 и 22), отмечаются как «пригодные». Эти пригодные измерения используются после этого для выработки навигационного решения при помощи чистого навигационного фильтра GPS 30 или при помощи гибридного инерциального/GPS фильтра 40. Навигационное решение обычно содержит навигационные параметры ПСВ: Положение/Скорость/Время.
Таким образом, понятно, что, согласно стандартному автономному контролю целостности RAIM, в расчет принимаются вычисленные необработанные измерения для всех спутников, отслеживаемых приемником. После этого производят детектирование несогласованности системы спутников среди этих необработанных измерений, чтобы, в случае необходимости, исключить необработанные измерения, являющиеся причиной этой несогласованности.
Отсюда следует, что необработанные измерения, содержащие погрешность, но не порождающие несогласованности в системе спутников, не подлежат детектированию и/или исключению системой контроля RAIM. В этом случае такие измерения отмечаются как пригодные и используются для выработки навигационного решения.
Следует также отметить, что задачей контроля RAIM является детектирование и исключение несогласованности и защита вычисленного положения при наличии одного и единственного недостоверного измерения.
Необработанные данные, связанные с многолучевым непрямым распространением, которые, как было указано выше, влияют на достоверность навигационного решения, не обязательно являются причиной несогласованности в системе спутников. В этом случае достоверность навигационного решения не гарантируется.
Ситуация, при которой проявляется многолучевое непрямое распространение, тоже не предусмотрена контролем RAIM. При наличии такой ситуации система контроля RAIM не обеспечит исключения несогласованностей, даже если она сможет их обнаружить. И в этом случае достоверность навигационного решения тоже не гарантируется.
Таким образом, возникает потребность в усовершенствовании контроля целостности, в частности, для ограничения влияния многолучевого непрямого распространения, чтобы избежать использования при выработке навигационного решения ошибочных необработанных измерений, связанных с многолучевым непрямым распространением сигналов (и, в частности, связанных с чисто непрямым многолучевым распространением, при котором навигационная система принимает только отраженный сигнал, но не принимает прямого сигнала).
Настоящее изобретение призвано решить эту проблему, и его первым объектом является способ контроля навигационной системы, выполненной с возможностью приема сигналов от множества передатчиков, с возможностью вычисления для каждого передатчика набора необработанных навигационных измерений и с возможностью выработки навигационного решения на основании множества наборов необработанных навигационных измерений, в котором для передатчика, набор необработанных навигационных измерений которого не используют для выработки навигационного решения, контролируют согласованность набора необработанных навигационных измерений, вычисленного для указанного передатчика, с навигационным решением, при этом, если согласованность подтверждается, набор необработанных навигационных измерений, вычисленных для упомянутого передатчика, используют при выработке навигационного решения.
Этот способ содержит следующие предпочтительные, но не ограничительные отличительные признаки:
- передатчик отмечают как пригодный, если его набор необработанных навигационных данных считается достаточно согласованным для использования при выработке навигационного решения, и передатчик отмечается как непригодный, пока не будет подтверждена согласованность набора необработанных навигационных измерений, вычисленного для непригодного передатчика, с навигационным решением, выработанным на основании пригодных передатчиков;
- способ содержит предварительные этапы отслеживания нового передатчика и признания непригодности нового передатчика таким образом, чтобы не использовать набор необработанных навигационных измерений, вычисленный для непригодного передатчика, при выработке навигационного решения до контроля согласованности указанного набора с навигационным решением, выработанным на основании пригодных передатчиков;
- для первоначально пригодного передатчика способ содержит предварительный этап признания непригодности указанного передатчика, чтобы исключить его из выработки навигационного решения и чтобы разрешить его повторное использование для выработки навигационного решения и произвести повторное подтверждение его пригодности только после контроля согласованности набора необработанных навигационных измерений, вычисленного для этого непригодного передатчика, с навигационным решением, выработанным на основании пригодных передатчиков;
- пригодные передатчики циклично признаются непригодными;
- контроль согласованности содержит измерение отклонения между:
- псевдорасстоянием между навигационной системой и непригодным передатчиком, вычисленным для упомянутого непригодного передатчика;
- и псевдорасстоянием между навигационной системой и непригодным передатчиком, оцененным при помощи необработанных навигационных измерений, вычисленных для непригодных передатчиков;
- производят оценку положения навигационной системы при помощи псевдорасстояний, вычисленных для пригодных передатчиков, и производят оценку псевдорасстояния на основании этого оцененного положения и данных астрономической навигационной таблицы, относящихся к указанному непригодному передатчику;
- контроль согласованности содержит измерение отклонения между:
- псевдоскоростью навигационной системы, вычисленной для упомянутого непригодного передатчика;
- и псевдоскоростью навигационной системы, оцененной при помощи необработанных навигационных измерений, произведенных для пригодных передатчиков;
- производят оценку скорости навигационной системы при помощи псевдоскоростей, вычисленных для пригодных передатчиков, и производят оценку псевдоскорости на основании упомянутой оцененной скорости и данных астрономической навигационной таблицы, относящихся к указанному непригодному передатчику;
- осуществляют контроль согласованности псевдорасстояний и контроль согласованности псевдоскоростей;
- согласованность подтверждается, если контроль согласованности прошел успешно несколько раз подряд;
- наборы необработанных навигационных измерений, проходящие контроль согласованности, соответствуют наборам, не отклоненным системой наблюдения за RAIM.
Вторым объектом настоящего изобретения является навигационная система, выполненная с возможностью приема сигналов от множества передатчиков, содержащая средства вычисления набора необработанных навигационных измерений для каждого передатчика и средства выработки навигационного решения на основании множества наборов необработанных навигационных измерений, содержащая также средства контроля, согласованности набора необработанных навигационных измерений, вычисленного для передатчика, набор необработанных навигационных измерений которого не используют для выработки навигационного решения, с навигационным решением, при этом, как только согласованность подтверждается, средства выработки навигационного решения используют набор необработанных навигационных измерений, вычисленный для указанного передатчика.
Другие аспекты, задачи и преимущества настоящего изобретения будут более очевидны из нижеследующего подробного описания предпочтительных вариантов его выполнения, представленных в качестве неограничительных примеров, со ссылками на прилагаемые чертежи, на которых:
Фиг.1 (уже описана) - схема навигационной системы, использующей стандартный автономный контроль целостности RAIM.
Фиг.2 - схема навигационной системы согласно возможному варианту выполнения второго объекта изобретения.
В дальнейшем рассматривается пример спутниковой системы позиционирования GPS. Однако понятно, что изобретение не ограничивается этой частной системой, и его можно применять для любого типа спутниковой системы позиционирования типа GNSS (Global Navigation Satellite System), в частности для будущей системы Galileo.
На фиг.2 показана навигационная система S согласно возможному варианту выполнения изобретения. Некоторые компоненты системы S похожи на компоненты системы R, показанной на фиг.1; эти похожие компоненты обозначены одинаковыми позициями на фиг.1 и 2.
Система S содержит антенну А, выполненную с возможностью приема сигналов GPS от спутников T1-T5, N, находящихся на околоземной орбите. Система S содержит также средства 10 вычисления набора необработанных навигационных измерений для каждого из спутников, отслеживаемых системой S. Эти необработанные данные поступают в модуль RAIM 20, который содержит подмодуль 21 детектирования скачка и подмодуль FDE 22 детектирования и исключения ошибок. Данные измерений, получаемые на выходе модуля RAIM, отмечаются как пригодные.
Кроме того, система S содержит средства для выработки навигационного решения (как правило, навигационных параметров ПВС: Положение/Скорость/Время), выполненные в виде чистого навигационного фильтра GPS 30 или гибридного навигационного инерциального/GPS фильтра 40.
Считается, что в момент Т0 выработка навигационного решения происходит при помощи наборов необработанных навигационных измерений, соответствующих спутникам T1-T5. Такой набор необработанных измерений отмечается как пригодный.
В момент Т0 система S отслеживает новый сигнал GPS от спутника N. В этом случае средства 10 вычисляют новый набор необработанных навигационных измерений, соответствующий входящему спутнику N.
Все наборы необработанных навигационных измерений (в том числе новый набор, соответствующий входящему спутнику N) поступают в модуль RAIM 20, в котором осуществляется описанный выше стандартный контроль целостности.
Предположим, что модуль RAIM так или иначе не отклоняет новый набор необработанных навигационных измерений (соответствующий новому спутнику N).
Напомним, что обычно этот набор отмечается модулем RAIM как пригодный и в этом случае используется для выработки навигационного решения.
В рамках настоящего изобретения применяют принцип, согласно которому новому набору необработанных измерений (входящему спутнику N) не доверяют, пока не будет проверена его согласованность с уже имеющимися в наличии наборами необработанных измерений (соответствующими спутникам T1-T5).
В этой связи, даже если модуль RAIM 20 подтвердил достоверность набора необработанных измерений, связанного с входящим спутником N, изобретением предлагается отмечать этот набор как непригодный. Поэтому входящие необработанные измерения, связанные со спутником N, не используются при выработке навигационного решения.
В этом случае согласно изобретению предлагается контролировать согласованность набора необработанных навигационных измерений, вычисленного для спутника N, отмеченного как непригодный, с навигационным решением, выработанным тем или иным из фильтров 30, 40 на основании необработанных измерений, вычисленных для спутников T1-T5, отмеченных как пригодные. Иначе говоря, проверяют согласованность любого измерения, поступающего от вновь отслеживаемого спутника, с навигационным решением, выработанным при помощи старых наборов необработанных измерений (наборы, соответствующие уже отслеженным спутникам T1-T5).
Чтобы осуществлять этот контроль согласованности, система S в соответствии с настоящим изобретением содержит, - между выходом модуля RAIM 20 и входом фильтра 20, 30 выработки навигационного решения, - средства 50 контроля целостности, предназначенные, чтобы контролировать для спутника N, набор необработанных навигационных измерений которого не используют в выработке навигационного решения, согласованность набора необработанных навигационных измерений, вычисленного для указанного передатчика N, с навигационным решением.
Эти средства 50 могут быть также выполнены таким образом, чтобы в случае несогласованности не использовать набор необработанных навигационных измерений, вычисленный для указанного передатчика N, для выработки навигационного решения.
На фиг.2 стрелкой 51 показана передача средствами 50 контроля целостности в направлении чистого фильтра GPS 30 или гибридного инерциального/ GPS фильтра 40 наборов необработанных навигационных измерений, которые прошли последовательно стандартный контроль целостности RAIM (модуль 20) и контроль целостности в соответствии с настоящим изобретением (средства 50).
На фиг.2 стрелкой 31, соответственно 41, показано навигационное решение ПВС, передаваемое от чистого фильтра GPS 30, соответственно от гибридного инерциального/ GPS фильтра 40, на средства 50 контроля целостности. Это навигационное решение, выработанное при помощи необработанных измерений пригодных спутников (в данном случае спутников T1-T5), предназначено для сравнения в средствах 50 контроля целостности с необработанными измерениями спутника N, отмеченного как непригодный.
Согласно изобретению спутник отмечается, таким образом, средствами 50 контроля целостности, как
- пригодный, если считается, что его набор необработанных навигационных измерений может быть использован для выработки навигационного решения;
- непригодный, пока не подтверждается согласованность набора необработанных навигационных измерений, вычисленного для непригодного передатчика, с навигационным решением, выработанным на основании пригодных передатчиков.
Спутник отклоняется, и его необработанные измерения не направляются в фильтр 30, 40 выработки навигационного решения, если контроль согласованности выявляет несогласованность измерений, полученных от непригодного спутника, с навигационным решением, выработанным на основании измерений, полученных от пригодных спутников.
Таким образом, согласно варианту выполнения изобретения, когда отслеживается новый спутник N, необработанные измерения, произведенные для этого входящего спутника N, признаются непригодными, и набор необработанных измерений, вычисленный для этого непригодного спутника, не используется для выработки навигационного решения до контроля согласованности указанного набора с навигационным решением, выработанным на основании пригодных передатчиков.
Согласно другому возможному варианту изобретения, взятому в комбинации с предыдущим вариантом, связанным с контролем согласованности необработанных навигационных измерений входящего спутника, рассматривают случай пригодных спутников. Согласно этому другому варианту выполнения осуществляют этап признания непригодности первоначально пригодного спутника (например, спутника T1), чтобы исключить его из выработки навигационного решения (иначе говоря, необработанные измерения спутника T1 не направляются на фильтры 30, 40) и разрешить его повторное использование в выработке навигационного решения и подтвердить его пригодность только после контроля согласованности набора необработанных навигационных измерений, вычисленных для признанного непригодным спутника T1, с навигационным решением, выработанным только на основании оставшихся пригодных спутников Т1-Т5.
Этот другой вариант выполнения можно применять, разумеется, для всех или части пригодных спутников, чтобы проверить согласованность необработанных навигационных измерений одного пригодного спутника с навигационным решением, выработанным на основании необработанных навигационных измерений других пригодных спутников. В частности, изобретение предусматривает цикличное признание непригодности пригодных спутников, чтобы поочередно проверить согласованность их необработанных навигационных измерений.
Если рассмотреть пример контроля согласованности на входящем спутнике N, контроль согласованности в соответствии с настоящим изобретением может содержать для непригодного спутника N измерение отклонения между измеренным псевдорасстоянием PdN (речь идет об измерении, полученном из набора необработанных навигационных измерений, вычисленного для непригодного спутника N) и псевдорасстоянием P^dN, не зависимым от измеренного псевдорасстояния PdN и оцененным при помощи необработанных навигационных измерений, вычисленных для пригодных спутников T1-T5.
Оцененное псевдорасстояние Р^dN можно вычислить, используя набор псевдорасстояний Pd1-Pd5, измеренных для пригодных спутников T2-T5, чтобы оценить положение навигационной системы. Затем определяют оцененное псевдорасстояние Р^dN на основании указанного оцененного положения навигационной системы данных астрономической навигационной таблицы, касающейся указанного передатчика.
Понятно, что контроль согласованности псевдорасстояний позволяет осуществить тест вероятности по значимости измеренного псевдорасстояния PdN по отношению к положению (оцененному при помощи пригодных необработанных навигационных измерений без использования необработанных измерений передатчика N).
Если рассматривать все тот же пример согласованности для входящего спутника N, контроль согласованности в соответствии с настоящим изобретением может для непригодного спутника N содержать измерение отклонения между измеренной псевдоскоростью PvN (речь идет об измерении, полученном из набора необработанных навигационных измерений, вычисленного для непригодного спутника N) и псевдоскоростью P^νN, не зависимой от измеренной псевдоскорости PvN и оцененной при помощи необработанных навигационных измерений, вычисленных для пригодных спутников T1-T5.
Оцененную псевдоскорость P^νN можно вычислить, используя набор псевдоскоростей Pv1-Pv5, измеренных для пригодных спутников Т2-Т5, чтобы оценить скорость навигационной системы, и вычисляя оцененную псевдоскорость P^νN на основании указанного оцененного положения и данных астрономической навигационной таблицы, касающейся указанного передатчика.
Таким образом, контроль согласованности псевдоскоростей позволяет осуществить тест вероятности по значимости измеренной псевдоскорости PvN по отношению к скорости (оцененной при помощи пригодных необработанных навигационных измерений без использования необработанных измерений передатчика N).
Согласно предпочтительному варианту выполнения изобретения последовательно осуществляют вышеуказанный контроль согласованности псевдорасстояний, затем вышеуказанный контроль согласованности псевдоскоростей.
В рамках настоящего изобретения непригодный спутник (например, входящий спутник или пригодный спутник, признанный непригодным), в отношении которого проверили согласованность необработанных навигационных измерений с навигационным решением, выработанным при помощи необработанных навигационных измерений пригодных спутников, не отмечается как пригодный, пока контроль согласованности не пройдет успешно х раз подряд.
Параметр х, являющийся показателем продолжительности контроля, применяемый в средствах 50 контроля целостности и характеризующий последовательное число тестов, которые должны пройти успешно, до того как необработанные измерения непригодного спутника можно будет учитывать при выработке навигационного решения (в этом случае спутник отмечается как пригодный), можно, в частности, применить для установления компромисса между природой явления многолучевого (чистого) непрямого распространения и продолжительностью обработки перед включением необработанных измерений, вычисленных для вновь отслеживаемого спутника.
В случае когда результат контроля согласованности оказывается отрицательным, например когда контроль согласованности не прошел успешно несколько раз подряд, сигнал GPS отслеживаемого непригодного спутника отклоняется и можно запустить новый процесс считывания и отслеживания этого сигнала навигационной системой.
Предшествующий текст описания относился к случаю, когда наборы необработанных навигационных измерений соответствуют наборам, не отклоняемым системой автономного контроля целостности RAIM. Однако изобретение не ограничивается применением в дополнение к контролю целостности RAIM и, разумеется, может применяться самостоятельно или в дополнение к другому типу контроля целостности, чтобы убедиться, что любой новый набор необработанных данных может быть использован для выработки навигационного решения, только если этот новый набор является согласованным с набором уже использованных решений.
Понятно, что способ и система, являющиеся объектами изобретения, позволяют, в частности, избежать включения в вычисление навигационного решения необработанных измерений GPS, полученных в результате чистого многолучевого непрямого распространения сигналов, и, в целом, чтобы избежать включения в вычисление навигационного решения необработанных данных GPS, несогласованных с имеющимися в наличии необработанными измерениями GPS, хотя и не в такой степени несогласованных, чтобы привести к несогласованности системы спутников, детектируемой системой контроля целостности RAIM.
Изобретение относится к области навигационных систем. Техническим результатом является усовершенствование контроля целостности, избежание использования ошибочных необработанных измерений, связанных с многолучевым непрямым распространением сигналов. Навигационная система выполнена с возможностью приема сигналов от множества передатчиков (Т1-Т5, N), содержащая средства вычисления для каждого передатчика (T1-T5, N) набора необработанных навигационных измерений и средства выработки навигационного решения. Навигационная система содержит средства контроля согласованности набора необработанных навигационных измерений, вычисленного для передатчика (N). Передатчик отмечают как пригодный, если его набор необработанных навигационных измерений считается согласованным для использования при выработке навигационного решения, и передатчик отмечается как непригодный, пока не будет подтверждена согласованность набора необработанных навигационных измерений. Навигационная система выполнена с возможностью осуществления для первоначально пригодного передатчика (T1) предварительного этапа признания непригодности указанного передатчика, чтобы исключить его из выработки навигационного решения и чтобы разрешить его повторное использование для выработки навигационного решения. 2 н. и 8 з.п. ф-лы, 2 ил.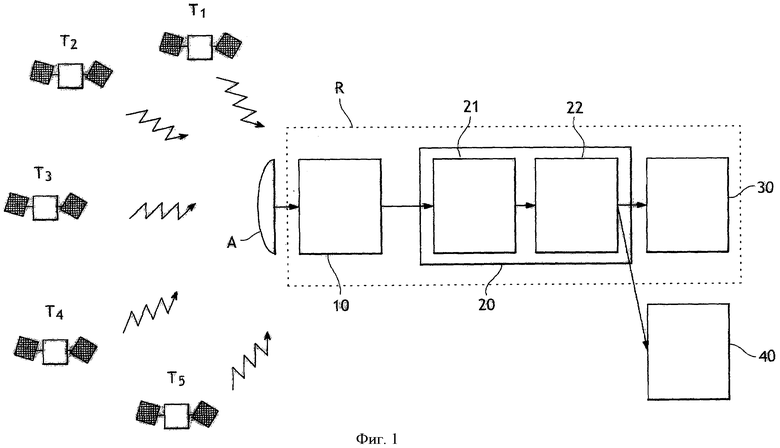
1. Способ контроля навигационной системы (S), выполненной с возможностью приема сигналов от множества передатчиков (Т1-Т5, N), с возможностью вычисления для каждого передатчика (T1-T5, N) набора необработанных навигационных измерений и с возможностью выработки навигационного решения на основании множества наборов необработанных навигационных измерений, в котором для передатчика (N), набор необработанных навигационных измерений которого не используют для выработки навигационного решения, контролируют согласованность набора необработанных навигационных измерений, вычисленного для указанного передатчика (N), с навигационным решением, при этом, если согласованность подтверждается, набор необработанных навигационных измерений, вычисленных для указанного передатчика (N), используют при выработке навигационного решения, причем передатчик отмечают как пригодный, если его набор необработанных навигационных измерений считается достаточно согласованным для использования при выработке навигационного решения, и передатчик отмечается как непригодный, пока не будет подтверждена согласованность набора необработанных навигационных измерений, вычисленного для непригодного передатчика, с навигационным решением, выработанным на основании пригодных передатчиков, при этом для первоначально пригодного передатчика (T1) выполняют предварительный этап признания непригодности указанного передатчика, чтобы исключить его из выработки навигационного решения и чтобы разрешить его повторное использование для выработки навигационного решения и произвести повторное подтверждение его пригодности только после контроля согласованности набора необработанных навигационных измерений, вычисленного для этого непригодного передатчика (T1), с навигационным решением, выработанным на основании пригодных передатчиков (Т2-Т5).
2. Способ по п.1, содержащий предварительные этапы отслеживания нового передатчика (N) и признания непригодности нового передатчика таким образом, чтобы не использовать набор необработанных навигационных измерений, вычисленный для непригодного передатчика, при выработке навигационного решения до контроля согласованности указанного набора с навигационным решением, выработанным на основании пригодных передатчиков (Т1-Т5).
3. Способ по п.2, в котором пригодные передатчики циклично признаются непригодными.
4. Способ по п.1, в котором контроль согласованности содержит измерение отклонения между:
псевдорасстоянием (РdN) между навигационной системой и непригодным передатчиком (N), вычисленным для упомянутого непригодного передатчика; и
псевдорасстоянием (Р^dN) между навигационной системой и непригодным передатчиком, оцененным при помощи необработанных навигационных измерений, вычисленных для пригодных передатчиков (T1-T5);
5. Способ по п.4, в котором производят оценку положения навигационной системы при помощи псевдорасстояний (Pd1-Pd5), вычисленных для пригодных передатчиков (T1-T5), и производят оценку псевдорасстояния (Р^dN) на основании этого оцененного положения и данных астрономической навигационной таблицы, относящихся к указанному непригодному передатчику.
6. Способ по п.1, в котором контроль согласованности содержит измерение отклонения между:
псевдоскоростью (РvN) навигационной системы, вычисленной для указанного непригодного передатчика (N); и
псевдоскоростью (P^vN) навигационной системы, оцененной при помощи необработанных навигационных измерений, произведенных для пригодных передатчиков (T1-T5).
7. Способ по п.6, в котором производят оценку скорости навигационной системы при помощи псевдоскоростей (Pv1-Pv5), вычисленных для пригодных передатчиков (T1-Т5), и производят оценку псевдоскорости (Р^vN) на основании указанной оцененной скорости и данных астрономической навигационной таблицы, относящихся к указанному непригодному передатчику.
8. Способ по любому из пп.4-7, в котором согласованность подтверждается, если контроль согласованности прошел успешно несколько раз подряд.
9. Способ по п.1, в котором наборы необработанных навигационных измерений, проходящие контроль согласованности, соответствуют наборам, не отклоненным системой автономного контроля целостности RAIM.
10. Навигационная система, выполненная с возможностью приема сигналов от множества передатчиков (T1-Т5, N), содержащая средства вычисления для каждого передатчика (T1-Т5, N) набора необработанных навигационных измерений и средства (40, 50) выработки навигационного решения (41, 51) на основании множества наборов необработанных навигационных измерений, содержащая средства (50) контроля согласованности набора необработанных навигационных измерений, вычисленного для передатчика (N), набор необработанных навигационных измерений которого не используют для выработки навигационного решения, с навигационным решением, при этом, как только согласованность подтверждается, средства выработки навигационного решения используют набор необработанных навигационных измерений, вычисленный для указанного передатчика (N), причем передатчик отмечают как пригодный, если его набор необработанных навигационных измерений считается достаточно согласованным для использования при выработке навигационного решения, и передатчик отмечается как непригодный, пока не будет подтверждена согласованность набора необработанных навигационных измерений, вычисленного для непригодного передатчика, с навигационным решением, выработанным на основании пригодных передатчиков, при этом навигационная система выполнена с возможностью осуществления для первоначально пригодного передатчика (T1) предварительного этапа признания непригодности указанного передатчика, чтобы исключить его из выработки навигационного решения и чтобы разрешить его повторное использование для выработки навигационного решения и произвести повторное подтверждение его пригодности только после контроля согласованности набора необработанных навигационных измерений, вычисленного для этого непригодного передатчика (T1), с навигационным решением, выработанным на основании пригодных передатчиков (T2-T5).
| US 5631838 А, 20.05.1997 | |||
| US 3889266 А, 10.06.1975 | |||
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| ЦИФРОВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА РАДИОЛОКАЦИОННОЙ СТАНЦИИ ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2177171C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1999 |
|
RU2155354C1 |

