ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к области спутниковых систем глобальной навигации. В частности, настоящее изобретение относится к оценке неоднозначности сигналов GNSS для трех или более несущих.
УРОВЕНЬ ТЕХНИКИ
Спутниковые системы глобальной навигации (GNSS) включают в себя Глобальную систему позиционирования (GPS), Glonass и проектируемую систему Galileo.
Каждый спутник GPS непрерывно передает с использованием двух радиочастот в диапазоне L, именуемых L1 и L2, на соответствующих частотах 1575.42 МГц и 1227.60 МГц. На L1 передаются два сигнала, один для гражданских пользователей и другой для уполномоченных пользователей министерства обороны (МО). На L2 передается один сигнал, предназначенный только для уполномоченных пользователей МО. Каждый сигнал GPS имеет несущую на частоте L1 или L2, псевдослучайные шумовые (PRN) коды и данные спутниковой навигации. Каждый спутник передает два разных кода PRN: код «грубого захвата» (C/A) и точный код (P/Y), который зашифрован. Каждый код C/A является уникальной последовательностью из 1023 битов, которые повторяются каждую миллисекунду.
На фиг.1 показана схема типичного сценария двух несущих частот согласно уровню техники. Приемник 100 принимает сигналы GPS от любого количества спутников, находящихся в зоне прямой видимости, например, SV1, SV2 и SVm, обозначенных позициями 110, 120 и 130, соответственно. Сигналы проходят через атмосферу Земли (ионосферу и тропосферу), схематически обозначенную как 140. Каждый сигнал имеет две частоты, L1 и L2. Приемник 100 определяет из сигналов соответствующую псевдодальность, PR1, PR2, PRm, для каждого из спутников. Атмосферные и многолучевые эффекты приводят к изменениям пути сигнала, как схематически обозначено позицией 150, что вносит ошибку в определение псевдодальности.
Поскольку код C/A можно измерить с ошибкой около одного метра, гражданский приемник, не использующий чисто военный код P/Y, определяет позицию с ошибкой порядка метров. Однако фазу несущих L1 и L2 можно измерить с точностью 0,01 - 0,05 периода (2 мм - 1 см), поэтому относительные позиции можно оценить более точно - с ошибкой в пределах от миллиметров до сантиметров. Методы точного позиционирования используют фазу несущей L1 и L2 и разрешение неоднозначности в целых числах, хорошо исследованную область точного спутникового позиционирования.
Было разработано много методов для быстрого и надежного определения циклической неоднозначности сигналов фазы несущей, наблюдаемых оборудованием спутникового позиционирования. Методы разрешения неоднозначности обычно предусматривают использование наблюдений однозначного кода и наблюдений на множественных спутниках для уменьшения потенциальных неоднозначностей фазы несущей, пока не удастся принять решение относительно единственного кандидата. Наблюдения когерентно генерируемых сигналов фазы несущей дополнительно повышает скорость и надежность разрешения неоднозначности.
Процесс разрешения неоднозначности содержит три этапа:
1. оценка приближенных значений неоднозначности на каждом спутнике и диапазоне фаз несущих,
2. статистический поиск среди потенциальных кандидатов неоднозначности для получения упорядоченного списка наилучших кандидатов и
3. проверка наилучшего кандидата неоднозначности.
Получение хороших оценок неоднозначности значительно уменьшает усилия, необходимые для статистического поиска и проверки.
Классический подход к оценке неоднозначностей фазы несущей состоит в построении глобального фильтра (блока оценки), который включает в себя состояния (неизвестные параметры) для
1. координат роверной станции (x, y, z),
2. членов неоднозначности фазы несущей для каждого спутника и каждого диапазона несущей частоты,
3. параметров помехи для ионосферного смещения (по одному на спутник),
4. часов и параметров остаточного тропосферного смещения (хотя эти состояния часто игнорируют при использовании вычисления двойной разности для наблюдений).
На фиг.2 показано решение, отвечающее уровню техники, в котором все неоднозначности для всех наблюдаемых спутников и обеих частот оцениваются с использованием одного большого вектора состояния. Необработанные данные 200 GPS для наблюдений L1 и L2 множественных спутников подготавливаются на этапе 210 и подаются в качестве подготовленного набора данных 220 на глобальный фильтр 230 Калмана. Фильтр 230 выдает оценки неоднозначности для наблюдений L1 и L2.
В настоящее время Глобальная система позиционирования (GPS) позволяет одновременно отслеживать до 12 спутников над локальным горизонтом пользователя. Каждый спутник GPS передает на двух несущих частотах. Поэтому количество состояний, подлежащих обновлению в фильтре, равно, например, 41:
- 3 состояния координаты ровера (x, y, z)
- 12*2 состояний неоднозначности (для наблюдений фазы на двух частотах),
- 12 параметров ионосферного смещения,
- 1 состояние часов и 1 состояние тропосферного смещения.
Количество операций над числами с плавающей точкой для обновления фильтра Калмана с n состояниями приблизительно равно n3 (M. Grewal et al., Kalman filtering: theory and practice using MATLAB, second edition, 2001, John Wiley & Sons, New York, ISBN: 0-471-39254-5). Поэтому для скорости и эффективности вычисления желательно минимизировать количество состояний, включенных в один фильтр Калмана.
Со вводом в эксплуатацию европейской спутниковой системы Galileo будет одновременно доступно до 30 спутников (nSat=30). Предполагается, что спутники Galileo будут передавать на трех или, возможно, четырех несущих частотах. С модернизацией GPS станут доступны три несущих частоты (nFreq=3). См., например, K. DE Jong, Future GPS and Galileo Signals, Geoinformatics, сентябрь 2002 (две страницы); G. HEIN et al., Galileo Frequency & Signal Design, GPS World, июнь 2003, стр. 30-37; S. Cliatt, GPS Modernization, Proceedings of the GNSS 2003, 22-25 апреля 2003, Грац, Австрия. Если одновременно обрабатываются данные от двух опорных станций (nRef=2) для трех несущих частот, то количество состояний, которые потребуется обновлять в одном фильтре, может быть равно, например:
3 + (nSat * nFreq * nRef) + (nSat * nRef) + (3 * nRef ) = 249 состояний
Даже при ожидаемом повышении мощности встроенного компьютера, весьма возможно, что вычислительная нагрузка на один фильтр будет слишком велика. Для многих приложений, например, определения позиции в реальном времени, важно получать надежную оценку в данном интервале времени, например, один раз за эпоху данных. Кроме того, интенсификация обработки обычно связана с повышением энергопотребления на оборудовании приемника, что является важным фактором для некоторых типов оборудования, например, с батарейным питанием, портативных приборов.
Один подход к снижению вычислительной нагрузки большой проблемы фильтрации состоит в использовании децентрализованных фильтров. Однако, математические подходы к децентрализованной фильтрации по Калману, предложенные в N. Carlson, Federated Square Root Filter for Decentralized Parallel Processing, IEEE Transactions on Aerospace and Electronic Systems, т. AES-26, № 3, май 1990, не устраняет трудности применения техники к проблемам разрешения неоднозначности фазы несущей.
Хотя децентрализованная фильтрация ранее использовалась в системах управления и задачах оценки и при разрешении неоднозначности фазы несущей для существующих двухчастотных сигналов GPS, требуются методы, применимые к будущим системам GNSS, имеющим три или более частот, например, Galileo и модернизированной GPS.
Код и фаза несущей использовались в фильтрах «от спутника к спутнику». R. Hatch предложил использовать узкодорожечный код L1/L2 совместно с широкодорожечной двухчастотной комбинацией фаз несущих. См. R. HATCH, The synergism of GPS code and carrier phase ambiguities, Proceedings of the 3rd International Geodetic Symposium on Satellite Doppler Positioning, Лас-Крейсез, Нью-Мексико, февраль 1982, т.2, стр.1213-1232, и P. Misra et al., Global Positioning System: Signals, Measurements, and Performance, Ganja-Jamuna Press, 2001, стр. 230-233.
Известна также фазовая комбинация с наименьшей ошибкой, в которой шум измерения выравнивается с ионосферным смещением с целью минимизации ошибки. С подробной теорией вывода фазовой комбинации с наименьшей ошибкой можно ознакомиться в L. SJÖBERG, The best linear combinations of L1 and L2 frequency observables in the application of Transit/Doppler and GPS, Manuscripta Geodetica 15, 1990, стр. 17-22.
На фиг.3 показано решение, отвечающее уровню техники, для обработки текущих данных сигнала GPS с двумя несущими, которая реализована для последующей обработки двухчастотных данных в продуктах Trimble Navigation Limited, имеющих пакет программного обеспечения TTC 2.7. Приемник 300 выдает набор данных сигнала GPS 305, имеющий наблюдения L1 и L2 для множественных спутников. Процесс 310 вычисляет коэффициенты 315 из набора 305 данных сигнала GPS. Набор 305 данных сигнала GPS и коэффициенты 315 передаются трем процессам фильтрации: процессу 320 геометрической фильтрации, процессу 330 ионосферной фильтрации, не зависящей от геометрии, и процессу 340 кодовой фильтрации, не зависящей от геометрии и не зависящей от ионосферы. Процесс 320 геометрической фильтрации использует геометрическую комбинацию фаз несущих для получения массива 325 оценок неоднозначности для геометрической комбинации фаз несущих и соответствующей статистической информации. Процесс 330 ионосферной фильтрации использует ионосферную не зависящую от геометрии комбинацию фаз несущих для получения массива 335 оценок неоднозначности для ионосферной комбинации фаз несущих и соответствующей статистической информации. Процесс 340 кодовой фильтрации использует комбинации кодов несущих, не зависящие от геометрии и не зависящие от ионосферы для получения массива 345 оценок неоднозначности для комбинаций кодов несущих, не зависящих от геометрии и не зависящих от ионосферы, и соответствующую статистическую информацию. Массивы 325, 335 и 345 передаются процессу 350 объединения для получения массива 355 оценок неоднозначности для всех наблюдений фазы несущей и соответствующей статистической информации. Массив 355 передается процессу 360 вычисления решений в числах с плавающей точкой для вычисления позиции 365. Кодовый фильтр 340 имеет один широкодорожечный фильтр, который включает в себя моделирование многолучевого распространения, но не включает в себя моделирование шума. Решение, отвечающее уровню техники, не подходит к GNSS с тремя или более несущими частотами, например, Galileo.
На фиг.4 схематически показан сценарий трех несущих частот, например, предложенный для Galileo и для модернизированной GPS. Приемник 400 принимает сигналы GNSS от любого количества спутников, находящихся в зоне прямой видимости, например, SV1, SV2 и SVm, обозначенных позициями 410, 420 и 430, соответственно. Сигналы проходят через атмосферу Земли, схематически обозначенную как 440. Каждый сигнал имеет три или более частоты, f1, f2, ..., fk. Приемник 400 определяет из сигналов соответствующую псевдодальность, PR1, PR2, PRm, для каждого из спутников. Атмосферные и многолучевые эффекты приводят к изменениям пути сигнала, как схематически обозначено позицией 450, что вносит ошибку в определение псевдодальности.
На фиг.5 показано решение, предназначенное для проектируемой системы Galileo с тремя несущими частотами. Приемник 500 выдает набор 505 данных сигнала Galileo, имеющий наблюдения трех несущих для множественных спутников. Процесс 510 вычисляет коэффициенты 515 из набора 505 данных сигнала Galileo. Набор 505 данных сигнала Galileo и коэффициенты 515 передаются двум процессам фильтрации: процессу 520 геометрической фильтрации и единому банку процессов 530 фильтрации, не зависящих от геометрии. Процесс 520 геометрической фильтрации использует геометрическую комбинацию фаз несущих для получения массива 525 оценок неоднозначности для геометрической комбинации фаз несущих и соответствующей статистической информации. Единый банк процессов 530 фильтрации, не зависящих от геометрии, применяет фильтр, не зависящий от геометрии, для каждого спутника, создавая для всей информации, не зависящей от геометрии, единый выходной массив 535 оценок неоднозначности для комбинаций, не зависящих от геометрии, и соответствующую статистическую информацию. Массивы 525 и 535 подаются в комбинирующий процесс 540 для получения массива 545 оценок неточностей для всех наблюдений фазы несущей и связанной статистической информации. Массив 545 передается вычислительному процессу 550 для вычисления фиксированной позиции 555 с использованием целочисленных наименьших квадратов, проверки и вычисления позиции. Подробности относительно фильтров, не зависящих от геометрии, можно найти в Laboratory Experiment On Carrier Phase Positioning Techniques for GNSS-2 (TCAR-Test), Technical Note WP 2100: Use of Physical Space Information, ESA/ESTEC Contract No. 12.406/77/NL/DS Rider 1, a Confidential Report of Spectra Precision Terrasat GmbH, датированном декабрем 1999. Недостаток этого предложенного подхода к разрешению неоднозначности с тремя несущими (TCAR) состоит в том, что все ошибки обрабатываются как шум, отчего эффективность вычислений оказывается ниже желаемой, и создаются оценки неоднозначности, которые хуже желаемых.
Для разрешения неоднозначности сигналов GNSS, имеющих три или более несущих, необходимы усовершенствованные способы и системы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Варианты осуществления изобретения относятся к необходимому разрешению неоднозначности фазы несущей в будущих системах GNSS, имеющих три или более частот, например, Galileo и усовершенствованной GPS.
Для получения хороших аппроксимаций неоднозначностей фазы несущей для трех или более частотных диапазонов используются эффективные вычислительные методы, значительно снижающие усилия, необходимые для статистического поиска и проверки.
Преимущества вариантов осуществления изобретения по сравнению с существующими методами разрешения неоднозначности для множественных несущих включают в себя высокую вычислительную эффективность фильтрующих компонентов (решение в числах с плавающей точкой) и возможность получения более обширной информации о свойствах ошибки отдельных измерений и групп измерений. Эта эффективность дает одно или несколько преимуществ. Требуются менее производительные обрабатывающие компоненты, что позволяет создавать приемники меньшей стоимости и/или с меньшим энергопотреблением. Даже при наличии мощности обработки большинство современных ЦП позволяют экономить мощность благодаря снижению тактовой частоты процессора и/или переводу блока обработки в своего рода спящий режим, в котором никакие вычисления не ожидают выполнения. Это является важным фактором для стоимости, веса и времени выполнения. Для данной вычислительной мощности варианты осуществления изобретения позволяют использовать лучшие вычислительные модели по сравнению с уровнем техники, что повышает производительность системы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - схема типичного сценария двух несущих частот, согласно уровню техники.
Фиг.2 - подход согласно уровню техники к обработке данных сигнала GPS с двумя несущими частотами.
Фиг.3 - еще один подход согласно уровню техники к обработке данных сигнала GPS с двумя несущими частотами.
Фиг.4 - схема предложенного сценария трех несущих частот, согласно уровню техники.
Фиг.5 - решение согласно уровню техники для проектируемой системы Galileo с тремя несущими частотами.
Фиг.6 - архитектура для определения позиции GNSS согласно варианту осуществления настоящего изобретения.
Фиг.7 - еще одна архитектура для определения позиции GNSS согласно варианту осуществления настоящего изобретения.
Фиг.8 - схема элементов фильтра разрешения неоднозначности для 3+ несущих с полным разложением согласно вариантам осуществления настоящего изобретения.
Фиг.9 - сводка по количествам отдельных фильтров и банков фильтров согласно вариантам осуществления настоящего изобретения.
Фиг.10 - структура банка ионосферных фильтров, не зависящих от геометрии, согласно вариантам осуществления настоящего изобретения.
Фиг.11А - структура банка фильтров квинтэссенции согласно вариантам осуществления настоящего изобретения.
Фиг.11В - обобщенная структура, в которой предусмотрена совокупность банков фильтров квинтэссенции согласно вариантам осуществления настоящего изобретения.
Фиг.12А - структура одного банка кодовых фильтров, не зависящих от геометрии, согласно вариантам осуществления настоящего изобретения.
Фиг.12В - структура одного банка кодовых фильтров, не зависящих от геометрии и не зависящих от ионосферы, согласно вариантам осуществления настоящего изобретения.
Фиг.13 - структура нескольких банков кодовых фильтров, не зависящих от геометрии и не зависящих от ионосферы, согласно вариантам осуществления настоящего изобретения.
Фиг.14 - структура нескольких взаимно ортогональных банков кодовых фильтров, не зависящих от геометрии и не зависящих от ионосферы, согласно вариантам осуществления настоящего изобретения.
Фиг.15 - логическая блок-схема способа обработки высокого уровня согласно вариантам осуществления настоящего изобретения.
Фиг.16 - логическая блок-схема, демонстрирующая пример инициализации системы, согласно вариантам осуществления настоящего изобретения.
Фиг.17 - логическая блок-схема, демонстрирующая пример инициализации системы в одной эпохе, согласно вариантам осуществления настоящего изобретения.
Фиг.18 - схема способа, согласно вариантам осуществления настоящего изобретения, для обработки набора данных сигнала GNSS с тремя или более несущими.
Фиг.19 - применение способа, показанного на фиг.18, для получения расчетной позиции приемника GNSS с 3+ несущими частотами.
Фиг.20 - еще одно применение способа, показанного на фиг.18, для получения расчетной позиции приемника GNSS с 3+ несущими частотами.
Фиг.21 - еще одно применение способа, показанного на фиг.18, для получения расчетной позиции приемника GNSS с 3+ несущими частотами.
Фиг.22 - пример архитектуры фильтрации согласно вариантам осуществления настоящего изобретения.
Фиг.23 - способ, соответствующий архитектуре, показанной на фиг.22.
Фиг.24 - еще один способ согласно вариантам осуществления настоящего изобретения.
Фиг.25 - архитектура приемника GNSS согласно вариантам осуществления настоящего изобретения.
Фиг.26 - архитектура приемника GNSS согласно вариантам осуществления настоящего изобретения.
Фиг.27 - архитектура приемника GNSS согласно вариантам осуществления настоящего изобретения.
Фиг.28 - архитектура двухсистемного приемника GNSS согласно вариантам осуществления настоящего изобретения.
Фиг.29 - вариант осуществления процессора опорного приемника для подготовки потока форматированных многодиапазонных данных RTK.
Фиг.30 - вариант осуществления процессора многосистемного опорного приемника GNSS для подготовки потока форматированных многодиапазонных данных RTK.
Фиг.31 - режим работы, согласно вариантам осуществления настоящего изобретения, в котором применяется одна опорная станция.
Фиг.32 - режим работы, согласно вариантам осуществления настоящего изобретения, в котором применяется совокупность опорных станций, образующих сеть.
Фиг.33 - режим работы, согласно вариантам осуществления настоящего изобретения, в котором применяется совокупность отдельных опорных станций.
Фиг.34 - элементы еще одного фильтра разрешения неоднозначности для 3+ несущих с полным разложением согласно вариантам осуществления настоящего изобретения.
Фиг.35 - еще один способ, согласно вариантам осуществления настоящего изобретения, для обработки набора данных сигнала GNSS с тремя или более несущими.
Фиг.36 - применение способа, показанного на фиг.35, для получения расчетной позиции приемника GNSS с 3+ несущими частотами.
Фиг.37 - еще одно применение способа, показанного на фиг.35, для получения расчетной позиции приемника GNSS с 3+ несущими частотами.
Фиг.38 - еще одно применение способа, показанного на фиг.35, для получения расчетной позиции приемника GNSS с 3+ несущими частотами.
ПОДРОБНОЕ ОПИСАНИЕ
В контексте настоящего изобретения, следующие термины имеют указанное ниже значение, если в контексте не оговорено обратное:
GALILEO - спутниковая навигационная система Galileo, развертывание которой запланировано Европейским Космическим Агентством.
GLONASS - спутниковая навигационная система Glonass, развернутая Советским Союзом.
GNSS (Спутниковая система глобальной навигации) - общее обозначение систем GPS, GLONASS и GALILEO, аналогичных спутниковых навигационных систем, которые могут работать время от времени, и псевдоспутниковых систем.
GPS - Глобальная система позиционирования NAVSTAR, развернутая министерством обороны Соединенных Штатов, в том виде, в котором она существует сейчас, и может существовать в случае модернизации в будущем.
Псевдоспутник - передатчик сигналов типа GNSS. Псевдоспутник обычно является наземным устройством.
Опорный приемник (или опорная станция) - приемник GNSS в фиксированном положении.
Ровер - мобильный приемник GNSS.
Спутник - передатчик сигналов GNSS, псевдоспутник является частным случаем спутника.
Пользователь - ровер или опорный приемник.
Ниже приведен список используемых обозначений


Обзор
На фиг.6 показана логическая блок-схема, демонстрирующая архитектуру для вычисления позиции GNSS с использованием разрешения неоднозначности с разложением для сигналов GNSS с тремя или более несущими, согласно варианту осуществления настоящего изобретения. Набор 605 данных сигнала GNSS - это набор наблюдений, полученных путем приема сигналов множественных спутников на приемнике. Набор 605 данных сигнала GNSS поступает на элемент 610, который подготавливает данные к фильтрации, после чего результирующие подготовленные данные 615 поступают на элемент 620, который применяет фильтр разрешения неоднозначности несущей (CAR) с полным разложением к подготовленным данным.
Особенности и варианты элемента 620 фильтра разрешения неоднозначности несущей (CAR) с полным разложением подробно описаны ниже. Результатом применения фильтрующего элемента 620 к подготовленным данным является массив 625 для всех наблюдений фазы несущей и соответствующей статистической информации для всех передатчиков (т.е. для всех наблюдаемых спутников и/или псевдоспутников GNSS). Массив 625 поступает на элемент 630 расчета позиции, который рассчитывает позицию 635 приемника на момент наблюдений. В примере, показанном на фиг.6, элемент 630 вычисляет позицию 635 как решение в числах с плавающей точкой.
На фиг.7 показана логическая блок-схема еще одной архитектуры позиционирования GNSS с применением разрешения неоднозначности с разложением для сигналов GNSS с тремя или более несущими, согласно варианту осуществления настоящего изобретения. Набор 705 данных сигнала GNSS - это набор наблюдений, полученных путем приема сигналов множественных спутников на приемнике. Набор 705 данных сигнала GNSS поступает на элемент 710, который подготавливает данные к фильтрации, после чего результирующие подготовленные данные 715 поступают на элемент 720, который применяет фильтр разрешения неоднозначности несущей (CAR) с полным разложением к подготовленным данным.
Особенности и варианты элемента 720 фильтра разрешения неоднозначности несущей (CAR) с полным разложением подробно описаны ниже. Результатом применения фильтрующего элемента 720 к подготовленным данным является массив 725 для всех наблюдений фазы несущей и соответствующей статистической информации для всех передатчиков (т.е. для всех наблюдаемых спутников и/или псевдоспутников GNSS). Массив 725 поступает на элемент 730 расчета позиции, который рассчитывает позицию 735 приемника на момент наблюдений. В примере, показанном на фиг.7, элемент 730 вычисляет позицию 735, применяя к массиву 725 процесс 740 целочисленных наименьших квадратов.
На фиг.8 показана структура фильтра 820 разрешения неоднозначности для 3+ несущих с полным разложением, согласно вариантам осуществления настоящего изобретения, пригодного для осуществления процессов 620 и 720 фильтрации. Подготовленный набор 815 данных сигнала GNSS, например, подготовленный набор 615 или 715 данных сигнала GNSS, поступает на фильтр, содержащий несколько элементов для осуществления подпроцессов. Элемент 825 вычисляет коэффициенты из подготовленного набора данных и передает подготовленный набор данных с вычисленными коэффициентами на совокупность подфильтров. Эти подфильтры включают в себя один геометрический фильтр 830; банк 835 ионосферных фильтров, не зависящих от геометрии, имеющий по одному фильтру на наблюдаемый спутник; один или несколько банков 840(1) - 840(nf-2) фильтров квинтэссенции, в которых каждый банк фильтров имеет по одному фильтру на наблюдаемый спутник; и один или несколько банков 845(1) - 845(nf) кодовых фильтров, в которых каждый банк фильтров имеет по одному фильтру на наблюдаемый спутник. Массивы, созданные подфильтрами, поступают на объединитель 850, который обеспечивает объединенный массив 855 оценок неоднозначности для всех наблюдений фазы несущей с соответствующей статистической информацией. Массив 855, соответствующий массивам 625 и 725, поступает на элемент 860 для вычисления позиции, соответствующего процессам 630 и 730.
Количество банков фильтров квинтэссенции на два меньше количества nf несущих частот набора 815 данных сигнала GNSS, поскольку два вычисления используются геометрическим фильтром 830 и банком 835 ионосферных фильтров. Например, для системы GNSS, имеющей три несущих частоты, предусмотрен один банк фильтров квинтэссенции, и для системы GNSS, имеющей четыре несущих частоты, предусмотрены два банка фильтров квинтэссенции. Предусмотрен, по меньшей мере, один объединенный банк кодовых фильтров; при желании, можно обеспечить банки кодовых фильтров в количестве до количества nf несущих частот набора 815 данных сигнала GNSS. Например, для системы GNSS, имеющей три несущих частоты, предусмотрено любое количество банков кодовых фильтров от одного до трех, и для системы GNSS, имеющей четыре несущих частоты, предусмотрено любое количество банков кодовых фильтров от одного до четырех. На фиг.9 приведена сводка по количеству отдельных фильтров и банков фильтров согласно вариантам осуществления настоящего изобретения, причем каждый банк фильтров имеет по одному фильтру на спутник.
На фиг.10 показана структура банка 835 ионосферных фильтров, не зависящих от геометрии, согласно вариантам осуществления настоящего изобретения, для количества ns наблюдаемых спутников. Банк 835 ионосферных фильтров включает в себя соответствующий ионосферный фильтр 1010, 1020, ... 1030, не зависящий от геометрии, причем каждый фильтр соответствует соответствующему из наблюдаемых спутников Sat1, Sat2, ... Satns. Каждый фильтр применяется к данным сигнала GNSS для соответствующего спутника и выдает результат на элемент вычисления двойной разности 1040 для получения массива 1050 оценок неоднозначности для ионосферной комбинации фаз несущих и соответствующей статистической информации. Массив 1050 поступает на объединитель, например, объединитель 850, для объединения с массивами от других подфильтров фильтра CAR с полным разложением, например, фильтра 820.
На фиг.11А показана структура банка 1100 фильтров квинтэссенции согласно вариантам осуществления настоящего изобретения, для количества ns наблюдаемых спутников. Банк 1100 фильтров квинтэссенции включает в себя соответствующий фильтр 1105, 1110, ... 1115, не зависящий от геометрии и не зависящий от ионосферы, причем каждый фильтр соответствует соответствующему из наблюдаемых спутников Sat1, Sat2, ... Satns. Каждый фильтр применяется к данным сигнала GNSS для соответствующего спутника и выдает результат на элемент 1120 вычисления двойной разности для получения массива 1125 оценок неоднозначности для комбинации фаз несущих, не зависящей от геометрии и не зависящей от ионосферы, и соответствующей статистической информации. Массив 1125 поступает на объединитель, например, объединитель 850, для объединения с массивами от других подфильтров фильтра CAR с полным разложением, например, фильтра 820.
Согласно варианту осуществления настоящего изобретения, показанному на фиг.11А, когда система GNSS имеет три несущих частоты, предусмотрен один банк 1100 фильтров квинтэссенции. Согласно другому варианту осуществления изобретения, показанному на фиг.11В, предусмотрено nf-2 банков фильтров квинтэссенции, где nf - количество несущих частот GNSS. Например, в случае четырех несущих частот предусмотрено два банка фильтров квинтэссенции.
На фиг.11В показана обобщенная структура, в которой обеспечена совокупность банков 1100, 1130 фильтров квинтэссенции согласно вариантам осуществления настоящего изобретения для количества ns наблюдаемых спутников. Банк 1100 фильтров квинтэссенции такой же, как показано на фиг.11А. Банк 1130 фильтров квинтэссенции включает в себя фильтры 1135, 1140, ... 1145, не зависящие от геометрии и не зависящие от ионосферы, причем каждый фильтр соответствует соответствующему из наблюдаемых спутников Sat1, Sat2, ... Satns. Каждый фильтр применяется к данным сигнала GNSS для соответствующего спутника и выдает результат на элемент 1150 вычисления двойной разности для получения массива 1155 оценок неоднозначности для комбинации фаз несущих, не зависящей от геометрии и не зависящей от ионосферы, и соответствующей статистической информации. Массив 1155 поступает на объединитель, например, объединитель 850, для объединения с массивами от других подфильтров фильтра CAR с полным разложением, например, фильтра 820.
На фиг.12А показана структура одного банка 1200 кодовых фильтров, не зависящих от геометрии, согласно вариантам осуществления настоящего изобретения, для количества ns наблюдаемых спутников. Банк 1200 кодовых фильтров включает в себя независимые от геометрии, но не полностью независимые от ионосферы, фильтры 1205, 1210, ... 1215, причем каждый фильтр соответствует соответствующему из наблюдаемых спутников Sat1, Sat2, ... Satns. Каждый фильтр применяется к данным сигнала GNSS для соответствующего спутника и выдает результат на элемент 1220 вычисления двойной разности для получения массива 1225 оценок неоднозначности для комбинации кодов несущих, не зависящей от геометрии и не зависящей от ионосферы, и соответствующей статистической информации. Массив 1225 поступает на объединитель, например, объединитель 850, для объединения с массивами от других подфильтров фильтра CAR с полным разложением, например, фильтра 820.
На фиг.12В показана структура одного банка 1230 кодовых фильтров, не зависящих от геометрии и не зависящих от ионосферы согласно вариантам осуществления настоящего изобретения, для количества ns наблюдаемых спутников. Банк 1230 кодовых фильтров включает в себя фильтры 1235, 1240, ... 1245, не зависящие от геометрии и не зависящие от ионосферы, причем каждый фильтр соответствует соответствующему из наблюдаемых спутников Sat1, Sat2, ... Satns. Каждый фильтр применяется к данным сигнала GNSS для соответствующего спутника и выдает результат на элемент 1250 вычисления двойной разности для получения массива 1255 оценок неоднозначности для комбинации кодов несущих, не зависящей от геометрии и не зависящей от ионосферы, и соответствующей статистической информации. Массив 1225 поступает на объединитель, например, объединитель 850, для объединения с массивами от других подфильтров фильтра CAR с полным разложением, например, фильтра 820.
На фиг.13 показана структура нескольких банков 1300, ... 1330 кодовых фильтров, не зависящих от геометрии и не зависящих от ионосферы, согласно вариантам осуществления настоящего изобретения, для количества ns наблюдаемых спутников. Количество банков 1300, ... 1330 кодовых фильтров может быть любым числом вплоть до количества nf несущих частот GNSS. Например, система GNSS, имеющая три несущих частоты, может иметь до трех банков кодовых фильтров, а система GNSS, имеющая четыре несущих частоты, может иметь до четырех банков кодовых фильтров.
Согласно фиг.13, банк 1300 фильтров включает в себя фильтры 1305, 1310, ... 1315, не зависящие от геометрии и не зависящие от ионосферы, причем каждый фильтр соответствует соответствующему из наблюдаемых спутников Sat1, Sat2, ... Satns. Каждый фильтр применяется к данным сигнала GNSS для соответствующего спутника и выдает результат на элемент 1320 вычисления двойной разности для получения массива 1325 оценок неоднозначности для комбинации кодов несущих, не зависящей от геометрии и не зависящей от ионосферы, и соответствующей статистической информации. Массив 1325 поступает на объединитель, например, объединитель 850, для объединения с массивами от других подфильтров фильтра CAR с полным разложением, например, фильтра 820.
Согласно фиг.13, банк 1330 фильтров включает в себя фильтры, не зависящие от геометрии и не зависящие от ионосферы, причем каждый фильтр соответствует соответствующему из наблюдаемых спутников Sat1, Sat2, ... Satns. Каждый фильтр применяется к данным сигнала GNSS для соответствующего спутника и выдает результат на элемент 1350 вычисления двойной разности для получения массива 1355 оценок неоднозначности для комбинации кодов несущих, не зависящей от геометрии и не зависящей от ионосферы, и соответствующей статистической информации. Массив 1355 поступает на объединитель, например, объединитель 850, для объединения с массивами от других подфильтров фильтра CAR с полным разложением, например, фильтра 820.
На фиг.14 показана структура нескольких банков 1400, ... 1430 кодовых фильтров, не зависящих от геометрии и не зависящих от ионосферы, указанных как взаимно ортогональные, согласно вариантам осуществления настоящего изобретения, для количества ns наблюдаемых спутников. Количество взаимно ортогональных банков 1400, ..., 1430 кодовых фильтров может быть любым числом вплоть до количества nf несущих частот GNSS. Например, система GNSS, имеющая три несущих частоты, может иметь до трех банков кодовых фильтров, а система GNSS, имеющая четыре несущих частоты, может иметь до четырех банков кодовых фильтров.
Согласно фиг.14, банк 1400 фильтров включает в себя взаимно ортогональные фильтры 1405, 1410, ... 1415, не зависящие от геометрии и не зависящие от ионосферы, причем каждый фильтр соответствует соответствующему из наблюдаемых спутников Sat1, Sat2, ... Satns. Каждый фильтр применяется к данным сигнала GNSS для соответствующего спутника и выдает результат на элемент 1420 вычисления двойной разности для получения массива 1425 оценок неоднозначности для комбинации кодов несущих, не зависящей от геометрии и не зависящей от ионосферы, и соответствующей статистической информации. Массив 1425 поступает на объединитель, например, объединитель 850, для объединения с массивами от других подфильтров фильтра CAR с полным разложением, например, фильтра 820.
Согласно фиг.14, банк 1430 фильтров включает в себя взаимно ортогональные фильтры 1435, 1440, ... 1445, не зависящие от геометрии и не зависящие от ионосферы, причем каждый фильтр соответствует соответствующему из наблюдаемых спутников Sat1, Sat2, ... Satns. Каждый фильтр применяется к данным сигнала GNSS для соответствующего спутника и выдает результат на элемент 1450 вычисления двойной разности для получения массива 1455 оценок неоднозначности для комбинации кодов несущих, не зависящей от геометрии и не зависящей от ионосферы, и соответствующей статистической информации. Массив 1455 поступает на объединитель, например, объединитель 850, для объединения с массивами от других подфильтров фильтра CAR с полным разложением, например, фильтра 820.
На фиг.15 показана логическая блок-схема способа обработки высокого уровня согласно вариантам осуществления настоящего изобретения. После начала 1505 предварительно обработанные данные GNSS принимаются на этапе 1510. Фильтр разрешения неоднозначности для 3+ несущих с полным разложением, например, фильтр 820, инициализируется на этапе 1515 для первой эпохи и обрабатывает данные для первой эпохи. Результаты обработки для первой эпохи обеспечиваются в качестве выходного сигнала на этапе 1520. На этапе 1525 производится проверка, имеется ли предварительно обработанный набор данных для новой эпохи. Если нет, то процесс заканчивается на этапе 1530. Если да, то набор данных для новой эпохи обрабатывается на этапе 1535, и результаты обработки для новой эпохи обеспечиваются в качестве выходного сигнала на этапе 1520. После этого способ повторяется от этапа 1525, как указано.
На фиг.16 показана логическая блок-схема, демонстрирующая один из многих примеров инициализации системы, согласно вариантам осуществления настоящего изобретения. После начала 1605, на этапе 1610 производится проверка наличия необработанного набора данных GNSS для новой эпохи. Если нет, то считается, что инициализация не прошла, и управление возвращается через этап 1615 для перезапуска процесса на этапе 1605. Если да, то необработанный набор данных GNSS подготавливается на этапе 1620 и фильтруется на этапе 1625. Комбинация разрешения неоднозначности для 3+ несущих с полным разложением, например, комбинация 820, применяется к подготовленному и отфильтрованному набору данных на этапе 1630. Если оценки неоднозначности сходятся в недостаточной степени, то считается, что инициализация не прошла, и управление возвращается через этап 1615 для перезапуска процесса на этапе 1605. Если оценки неоднозначности сходятся в достаточной степени, то инициализация считается успешной, и позиция вычисляется, например, методом целочисленных наименьших квадратов, на этапе 1640. Достаточная степень сходимости оценок неоднозначности, позволяющая считать инициализацию успешной, определяется по выбору проектировщика и может составлять, например, плюс-минус пять или десять периодов несущей. Если оценки неоднозначности не сходятся, то ресурсы обработки для вычисления решения методом целочисленных наименьших квадратов можно зарезервировать путем перезапуска и ожидания свежего набора данных. В любом случае оценки неоднозначности могут сходиться за несколько эпох. На этапе 1645 осуществляется проверка решения, и на этапе 1650 производится проверка, была ли проверка успешной. Если нет, то считается, что инициализация не прошла, и управление возвращается через этап 1615 для перезапуска процесса на этапе 1605. Если да, то инициализация считается признается успешной на этапе 1655.
На фиг.17 показана логическая блок-схема, демонстрирующая один из многих примеров мгновенной инициализации системы в одной эпохе, согласно вариантам осуществления настоящего изобретения. После начала 1705 необработанный набор данных GNSS подготавливается на этапе 1710 и фильтруется на этапе 1715. Комбинация разрешения неоднозначности для 3+ несущих с полным разложением, например, комбинация 820, применяется к подготовленному и отфильтрованному набору данных на этапе 1720. На этапе 1725 производится проверка, возможна ли инициализация с имеющимися данными. Если нет, то считается, что инициализация не прошла, и управление возвращается через этап 1730 для перезапуска процесса на этапе 1705. Если да, то определяются целочисленные неоднозначности, например, методом целочисленных наименьших квадратов, на этапе 1735. На этапе 1740 осуществляется проверка решения, и на этапе 1745 производится проверка, была ли проверка успешной. Если нет, то считается, что инициализация не прошла, и управление возвращается через этап 1730 для перезапуска процесса на этапе 1705. Если да, то инициализация считается признается успешной на этапе 1750.
На фиг.18 схематически показан способ, согласно вариантам осуществления настоящего изобретения, для обработки набора данных сигнала GNSS 1805 с тремя или более несущими. Набор данных сигнала GNSS 1805 подвергается необязательной обработке на этапе 1810 для вычисления коэффициентов 1815 для использования в подфильтрах фильтра разрешения неоднозначности для 3+ несущих с полным разложением, например, фильтра 820; альтернативно, коэффициенты 1815 могут вычисляться на подфильтрах ценой несколько большей вычислительной нагрузки. Коэффициенты взаимосвязаны и ортогональны, поскольку они вычисляются для минимизации ошибки, что более подробно описано ниже. Подпроцесс 1820 фильтрации применяет к набору 1805 данных геометрический фильтр, например, геометрический фильтр 830, использующий геометрическую комбинацию фаз несущих, для получения массива 1825 оценок неоднозначности для геометрической комбинации фаз несущих и соответствующей статистической информации. Подпроцесс 1830 фильтрации применяет к набору 1805 данных банк ионосферных фильтров, например, банк 835 ионосферных фильтров, использующий ионосферную, не зависящую от геометрии, комбинацию фаз несущих, для получения массива 1835 оценок неоднозначности для ионосферной комбинации фаз несущих и соответствующей статистической информации.
Подпроцесс 1840 фильтрации применяет к набору 1805 данных, по меньшей мере, один банк фильтров квинтэссенции, например, банки 840(1)...840(nf-2) фильтров квинтэссенции, использующие не зависящую от геометрии и не зависящую от ионосферы комбинацию фаз несущих, для получения массива 1845 оценок неоднозначности для комбинации фаз несущих, не зависящей от геометрии и не зависящей от ионосферы, и соответствующей статистической информации. Количество банков фильтров квинтэссенции зависит от количества несущих частот, что рассмотрено выше со ссылкой на фиг.9 и 11В. Подпроцесс 1850 фильтрации применяет к набору 1805 данных, по меньшей мере, один банк кодовых фильтров, например, банк 1200 или 1230 кодовых фильтров или банки 1300 ... 1330 или 1400 ... 1430 кодовых фильтров, использующие совокупность комбинаций кодов несущих, не зависящих от геометрии, для получения массива 1855 оценок неоднозначности для комбинаций кодов несущих и соответствующей статистической информации для совокупности передатчиков. Количество и характеристики банков кодовых фильтров описаны выше со ссылкой на фиг.9, 12A, 12B, 13 и 14. Массивы 1825, 1835, 1845 и 1855 объединяются на этапе 1860 для получения объединенного массива 1865 оценок неоднозначности для всех наблюдений фазы несущей и соответствующей статистической информации. Подпроцессы 1820, 1830, 1840, 1850 фильтрации могут осуществляться параллельно, например, в отдельных потоках в процессоре или в отдельных процессорах по желанию, для оптимизации таких параметров, как эффективность вычислений, энергопотребление процессора и/или общее время обработки для определения позиции из наличия набора 1805 данных.
На фиг.19 показано применение способа, показанного на фиг.18, для получения расчетной позиции приемника 1900 GNSS с 3+ несущими частотами. Приемник 1900 подготавливает набор 1805 данных сигнала GNSS из наблюдаемых сигналов GNSS с 3+ несущими частотами. Массив 1865 передается процессу 1910, который вычисляет позицию приемника 1900 как решение в числах с плавающей точкой, в соответствии с временем получения набора 1805 данных и обеспечивает расчетную позицию 1920 в качестве выходного сигнала.
На фиг.20 показано еще одно применение способа, показанного на фиг.18, для получения расчетной позиции приемника 2000 GNSS с 3+ несущими частотами. Приемник 2000 подготавливает набор 1805 данных сигнала GNSS из наблюдаемых сигналов GNSS с 3+ несущими частотами. Массив 1865 передается процессу 2010, который определяет целочисленные неоднозначности методом целочисленных наименьших квадратов. Процесс 2015 проверки проверяет правильность решения, которое используется в процессе 2020 для вычисления позиции 2025 приемника 2000.
На фиг.21 показано еще одно применение способа, показанного на фиг.18, для получения как расчетной позиции 1920 в виде решения с плавающей точкой, так и расчетной позиции 2020 в виде комбинации чисел с плавающей точкой и с фиксированной точкой, для приемника 2100 GNSS с 3+ несущими частотами. Приемник 2100 собирает набор 1805 данных сигнала GNSS из наблюдаемых сигналов GNSS с 3+ несущими частотами. Массив 1865 передается процессу 1910, который вычисляет позицию приемника 1900 как решение в числах с плавающей точкой, в соответствии с временем получения набора 1805 данных и обеспечивает расчетную позицию 1920 в качестве выходного сигнала. Хотя данное решение не проверено и не столь точно, как проверенное решение, полученное методом целочисленных наименьших квадратов, позиция в виде решения в числах с плавающей точкой вычисляется быстрее и может быть, при возможности, дополнена решением, полученным методом целочисленных наименьших квадратов. Массив 1865 также передается процессу 2010, который определяет целочисленные неоднозначности методом целочисленных наименьших квадратов. Процесс 2015 проверки проверяет правильность решения. Процесс 2020 вычисляет позицию из проверенного решения. Расчетная позиция 2025, выданная как выходной сигнал, является проверенным решением в виде комбинации чисел с плавающей точкой и фиксированной точкой.
Для децентрализованной оценки неоднозначностей фазы несущей согласно вариантам осуществления настоящего изобретения требуются следующие фильтры:
- геометрический фильтр, например, фильтр 830, который обрабатывает комбинацию фаз несущих с наименьшей ошибкой для оценивания одного (объединенного) члена неоднозначности для каждого спутника плюс состояния позиции для приемника;
- банк ионосферных фильтров, например, банк 835, который оценивает ионосферное смещение на сигналах спутников с использованием ионосферной комбинации фаз несущих с наименьшей ошибкой;
- по меньшей мере, один банк фильтров квинтэссенции, который обрабатывает не зависящую от геометрии и не зависящую от ионосферы комбинацию фаз несущих для непосредственной оценки неоднозначностей фаз несущих; и
- один или несколько банков кодовых фильтров, вплоть до одного банка на каждый кодовый диапазон, которые обрабатывают фазовые комбинации, сформированные так, что их ионосферное смещение равно или близко к ионосферному смещению кода.
При одновременной обработке множественных опорных станций наиболее эффективный с точки зрения вычислений подход предусматривает реализацию блока фильтров для каждой опорной станции. Таким образом, геометрический фильтр 830, банк 835 ионосферных фильтров, один или несколько банков 840(1) ... 840(nf-2) фильтров квинтэссенции и один или несколько банков 845(1), 845(2) ... 845(nf) кодовых фильтров могут дублироваться для каждой из совокупности опорных станций, если это нужно для вычислительной эффективности.
Выходной сигнал банка фильтров объединяется с целью минимизации ошибки всякий раз, когда требуются неоднозначности фаз несущих. Обычно это делается каждую эпоху обновления измерения (скажем, раз в секунду), но, если платформа обработки имеет ограниченную пропускную способность, можно использовать более медленный диапазон обновления для распространения фильтров и осуществления объединения.
В случае применения множественных опорных станций, потоки данных всех опорных станций могут мультиплексироваться в блок оценки, что позволяет снизить вычислительную нагрузку.
Априорные модели ошибок
Опишем способ, в котором используется априорное знание характеристик ошибок измерений. Дисперсия некоррелируемого компонента ошибки (шума) используется совместно с дисперсией коррелируемой ошибки и ее постоянной времени корреляции. См. U. VOLLATH et al., Network RTK Versus Single Base RTK - Understanding the Error Characteristics, PROCEEDINGS OF THE GNSS-2002 CONFERENCE, май 2002, стр. 2774-2780.
Это реализуется посредством анализа репрезентативных наборов данных. Ошибки обычно зависят от угла возвышения отдельных спутников и/или отношения сигнал/шум, вычисляемого системами слежения приемников. В литературе описано много методов.
Один метод предусматривает использование функции отображения угла возвышения, которая позволяет вывести дисперсию σα 2 при угле возвышения α из дисперсии σ90° 2 при угле возвышения 90°.

Для ошибок, коррелируемых по времени, предполагается экспоненциальная временная корреляция со временем корреляции tc:

Ниже, σuk 2 будет обозначать дисперсию некоррелируемой ошибки (белого шума) в эпохе k. σck 2 - это дисперсия ошибки, коррелируемой по времени, в эпохе k с соответствующей постоянной времени tck.
Двойные разности против одинарных разностей
Продолжается обсуждение вопроса использования двойных разностей или одинарных разностей при обработке данных GNSS. Эквивалентность обоих подходов была доказана при реалистическом предположении, что не существует точной модели часов приемника. См. E. GRAFAREND et al., Generating Classes of Equivalent Linear Models by Nuisance Parameter Elimination- Applications to GPS Observations, Manuscripta Geodetica 11 (1986), стр. 262-271. Главной причиной отдания предпочтения одному или другому подходу является конфигурация алгоритмов (конструкция программного обеспечения).
Представленный здесь способ предусматривает использование одинарных разностей для фильтров, не зависящих от геометрии, и позволяет использовать одинарные или двойные разности для геометрических фильтров. Этап разрешения неоднозначности требует для работы двойные разности.
Опорный спутник
Хотя сам по себе процесс разрешения неоднозначности не зависит от выбора опорного спутника, опорный спутник нужно выбирать так, чтобы он мог фиксировать неоднозначности в двойных разностях. Можно использовать любой спутник, представленный в наборе данных. Из литературы известны два способа выбора опорного спутника:
1. используется спутник с наибольшим углом возвышения;
2. выбирается спутник с наименьшей ожидаемой ошибкой измерений; например, спутник с наибольшим отношением сигнал/шум.
Для анализа данных эти варианты выбора опорного спутника могут обеспечивать лучшее понимание ошибок данных.
Подготовка данных
Подготовка данных - это необязательный процесс, который предварительно вычисляет все, независимо от позиции ровера. Операция может проходить без этапа подготовки данных ценой увеличения нагрузки обработки в следующих процессах и необходимости передачи больших объемов данных.
Для создания предварительно обработанных данных несущей для спутника s, частоты f и позиции опорной станции  используется следующая формула:
используется следующая формула:

Если из модели также известна априорная информация об ионосфере, ее нужно учитывать при предварительной обработке:

При этом  - геометрическая дальность между спутником и позицией опорного приемника
- геометрическая дальность между спутником и позицией опорного приемника  и
и  - тропосферная задержка между спутником и позицией опорного приемника
- тропосферная задержка между спутником и позицией опорного приемника  , выведенная из некоторой тропосферной модели.
, выведенная из некоторой тропосферной модели.  - это тропосферная задержка между спутником и хорошей оценкой (например, дифференциальной позицией GNSS) позиции пользователя
- это тропосферная задержка между спутником и хорошей оценкой (например, дифференциальной позицией GNSS) позиции пользователя  , выведенная из той же тропосферной модели.
, выведенная из той же тропосферной модели.
Аналогично, предварительно обработанное измерение псевдодальности таково:

или, с использованием ионосферной модели,

Далее, все формулы относятся к предварительно обработанным измерениям.
Если подготовка данных не осуществляется, то нижеописанный способ предусматривает явное вычисление разности между измерениями, произведенными на опорном приемнике и пользовательском приемнике согласно вышеприведенной формуле.
Геометрический фильтр
Геометрический фильтр, например, геометрический фильтр 830, является классическим решением в числах с плавающей точкой, использующим комбинацию фаз несущих с наименьшей ошибкой  (см. нижеследующее рассмотрение, озаглавленное «геометрическая комбинация фаз несущих с наименьшей ошибкой»). Решение в числах с плавающей точкой может включать в себя состояние для моделирования остаточной тропосферной ошибки. Это общеизвестный стандартный метод для высокоточного позиционирования в спутниковой навигационной системе с использованием разрешения неоднозначности.
(см. нижеследующее рассмотрение, озаглавленное «геометрическая комбинация фаз несущих с наименьшей ошибкой»). Решение в числах с плавающей точкой может включать в себя состояние для моделирования остаточной тропосферной ошибки. Это общеизвестный стандартный метод для высокоточного позиционирования в спутниковой навигационной системе с использованием разрешения неоднозначности.
Решение в числах с плавающей точкой можно формализовать в одинарных или двойных разностях. В первом случае оператор вычисления двойной разности (см. нижеследующее рассмотрение, озаглавленное «оператор вычисления двойной разности») применяется до осуществления над результатами операции объединения (см. нижеследующее рассмотрение, озаглавленное «объединение»).
Согласно вариантам осуществления изобретения, моделирование коррелируемых ошибок в комбинации фаз несущих с наименьшей ошибкой осуществляется методом добавления состояний или, в отсутствие значительного шума, методом отбеливания шума.
Фильтры, не зависящие от геометрии
Опишем фильтры, не зависящие от геометрии, используемые для банков ионосферных, квинтэссенциальных и кодовых фильтров, например, банков 835, 840(1) ... 840(nf-2) и 845(1), 845(2) ... 845(nf) фильтров. Они реализуют оценивание неоднозначности данной наблюдаемой комбинации, не зависящей от геометрии,  с учетом некоррелируемого шума и коррелируемого шума при данном времени корреляции.
с учетом некоррелируемого шума и коррелируемого шума при данном времени корреляции.
Формализация фильтра Калмана
Фильтр, не зависящий от геометрии, согласно вариантам осуществления настоящего изобретения, реализован в виде фильтра Калмана, имеющего два состояния. Первое состояние (Nf) - это состояние неоднозначности, подлежащее оценке. Второе состояние (vck, где k - текущая эпоха) моделирует коррелируемый по времени компонент ошибки (добавление состояний) посредством экспоненциальной временной корреляции (процесс Гаусса-Маркова(1)).
Формулы, задающие фильтр Калмана (согласно A. Gelb (ed.), Applied Optimal Estimation, The M.I.T. Press, 1992, стр. 107-113), таковы:
Вектор состояния:

Матрица перехода между состояниями:
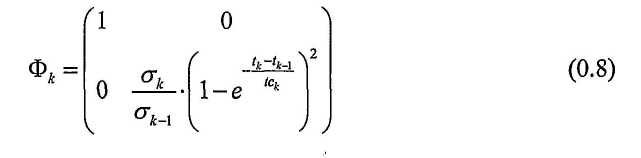
где верхний левый элемент 1 указывает, что неоднозначность постоянна от эпохи к эпохе, k - номер эпохи для текущей эпохи, k-1 - номер эпохи для предыдущей эпохи, tck - постоянная времени коррелируемого шума в эпохе k, и экспоненциальный член выражает предполагаемую экспоненциальную временную корреляцию (см. уравнение 0.2 выше).
Матрица задающего шума системы:

где верхний левый элемент 0 указывает, что состояние неоднозначности (состояние 1) статистически постоянно, и нижний левый элемент σc2 k - это дисперсия коррелируемого шума (дисперсия состояния 2) в эпохе k.
Матрица конструкции:

где значения 1 и 1 указывают, что измерение содержит сумму состояния неоднозначности (состояние 1) и коррелируемого шума (состояние 2).
Матрица шума измерения:

это дисперсия некоррелируемого шума (белого шума) в эпохе k.
Наблюдение

это измерение фазы несущей эпохи k для частоты f, подлежащей фильтрации. Инициализация фильтра:
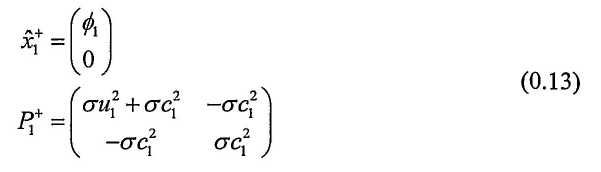
где нижний индекс 1 указывает, что процесс начинается с эпохи номер 1.
Стандартный алгоритм фильтра Калмана (для 1<k≤ne):
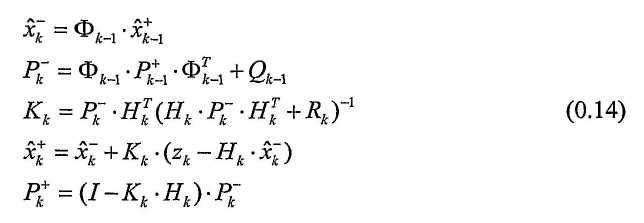
Первые две строки 0.14 служат для обновления во времени вектора состояния и распространения ошибки для каждой новой эпохи. Последние три строки 0.14 служат для обновления измерений для каждой новой эпохи.
Первая строка 0.14 создает вектор состояния для текущей эпохи k путем обновления вектора состояния для предыдущей эпохи с помощью матрицы перехода между состояниями Φk-1 предыдущей эпохи k-1 (которая, в свою очередь, учитывает постоянную времени шума, коррелируемого по времени).
Вторая строка 0.14 создает матрицу распространения ошибки  (матрица ковариации дисперсии состояния) для текущей эпохи k путем обновления распространения ошибки для предыдущей эпохи k-1 с помощью матрицы перехода между состояниями Φk-1 предыдущей эпохи k-1 (которая, в свою очередь, учитывает постоянную времени шума, коррелируемого по времени) и матрицы задающего шума системы Qk-1 для предыдущей эпохи k-1 (которая, в свою очередь, учитывает постоянную времени шума, коррелируемого по времени).
(матрица ковариации дисперсии состояния) для текущей эпохи k путем обновления распространения ошибки для предыдущей эпохи k-1 с помощью матрицы перехода между состояниями Φk-1 предыдущей эпохи k-1 (которая, в свою очередь, учитывает постоянную времени шума, коррелируемого по времени) и матрицы задающего шума системы Qk-1 для предыдущей эпохи k-1 (которая, в свою очередь, учитывает постоянную времени шума, коррелируемого по времени).
Третья строка 0.14 указывает, как коэффициент усиления Kk фильтра Калмана для текущей эпохи k связан с матрицей распространения ошибки  (которая, в свою очередь, является функцией шума, коррелируемого по времени, и его постоянной времени, согласно рассмотренному выше) и с матрицей шума измерения Rk, описывающей дисперсию некоррелируемого шума. Коэффициент усиления Kk фильтра Калмана можно рассматривать как «коэффициент смешивания» между обновлениями во времени старой информации и новыми измерительными наблюдениями.
(которая, в свою очередь, является функцией шума, коррелируемого по времени, и его постоянной времени, согласно рассмотренному выше) и с матрицей шума измерения Rk, описывающей дисперсию некоррелируемого шума. Коэффициент усиления Kk фильтра Калмана можно рассматривать как «коэффициент смешивания» между обновлениями во времени старой информации и новыми измерительными наблюдениями.
Четвертая строка 0.14 указывает, как обновленная оценка состояния для текущей эпохи k связана с обновленным во времени вектором состояния для текущей эпохи, коэффициентом усиления Kk фильтра Калмана для текущей эпохи и измерением фазы несущей, наблюдаемым для текущей эпохи k.
Пятая строка 0.14 - это матрица распространения ошибки  (матрица ковариации дисперсии состояния) для текущей эпохи k.
(матрица ковариации дисперсии состояния) для текущей эпохи k.
Фильтр Калмана можно реализовать с использованием UD-фильтра Биермана (см. G. Bierman, Factorization Methods for Discrete Sequential Estimation, Academic Press, 1977) или любой другой численно-стабилизированной реализации алгоритма фильтра Калмана.
Альтернативный формализм
В случае, когда некоррелируемые ошибки весьма малы по сравнению с коррелируемыми ошибками, можно применять упрощенный фильтр согласно вариантам осуществления настоящего изобретения. См. подход «отбеливания шума» в G. BIERMAN, Factorization Methods for Discrete Sequential Estimation, Academic Press, 1977, и "подход вычисления разности" в A. Gelb, (ed.), Applied Optimal Estimation, The M.I.T. Press, 1977, стр. 133-136. Это применимо к банкам ионосферных фильтров и фильтров квинтэссенции.
Инициализация фильтра:
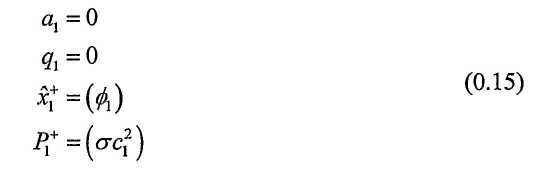
Алгоритм фильтрации (1<k≤ne):
где ck - модифицированный коэффициент корреляции, lk - модифицированная дисперсия (неопределенность), vk - неопределенность в измерении, αk - накопленная взвешенная информация, qk - указатель определенности с каждой новой эпохой (накопленные весовые коэффициенты, величина, обратная дисперсии), член αk/qk - неоднозначность, и величина, обратная qk - дисперсия неоднозначности.
Банки фильтров
Фильтры, не зависящие от геометрии, реализованы в виде банков из ns фильтров, по одному фильтру на отслеживаемый спутник.
Результат фильтра, не зависящего от геометрии, определяется путем вычисления разности относительно указанного опорного спутника, обычно имеющего наибольший угол возвышения или наименьшую ошибку. См. вышеприведенное рассмотрение опорного спутника. Выбор опорного спутника не влияет на результаты. Результаты определяются двойными разностями относительно выбранного опорного спутника. См. нижеследующее рассмотрение оператора вычисления двойной разности.
Ионосферный фильтр
Ионосферные фильтры, например, в банке 835 ионосферных фильтров, - это фильтры, не зависящие от геометрии, использующие ионосферную комбинацию фаз несущих с наименьшей ошибкой  . См. ниже рассмотрение ионосферной комбинации фаз несущих с наименьшей ошибкой.
. См. ниже рассмотрение ионосферной комбинации фаз несущих с наименьшей ошибкой.
Фильтры квинтэссенции
Для nƒ частот, nƒ-2 фильтров квинтэссенции, не зависящих от геометрии, например, в банках 840(1) ... 840(nf-2) фильтров квинтэссенции, реализованы с использованием квинтэссенциальных комбинаций фаз несущих  . См. ниже рассмотрение квинтэссенциальных комбинаций фаз несущих.
. См. ниже рассмотрение квинтэссенциальных комбинаций фаз несущих.
Кодовые фильтры
Для nƒ частот, nƒ кодовых фильтров, не зависящих от геометрии, например, в банках 845(1), 845(2)...845(nƒ) кодовых фильтров, реализованы с использованием комбинаций кодов несущих  . См. ниже рассмотрение комбинаций кодов несущих.
. См. ниже рассмотрение комбинаций кодов несущих.
Оператор вычисления двойной разности
Результаты фильтров, не зависящих от геометрии, задаются как одинарные разности между измерениями, проведенными на пользователе (например, ровере), и измерениями, проведенными на опорном приемнике. Для преобразования одинарных разностей в двойные разности оператор вычисления двойной разности применяется до объединения результатов фильтров, например, до подачи результатов на объединитель 850. Оператор вычисления двойной разности Mdif выглядит, например, так:
где число столбцов равно количеству спутников, и число строк на единицу меньше количества спутников, в данном примере предполагается, что первый спутник является опорным спутником, и что измерения для других спутников вычитаются из измерений для опорного спутника.
Оценка состояния неоднозначности в виде значения двойной разности с плавающей точкой является произведением оператора вычисления двойной разности Mdif и одинарных разностей:

Матрица ковариации дисперсии двойных разностей для результата Qdif является произведением матрицы ковариации дисперсии одинарных разностей Qsd и оператора вычисления двойной разности и транспонированного оператора вычисления двойной разности:

Статистические значения, используемые для проверки результатов, рассмотренные ниже, одинаковы для двойных разностей и одинарных разностей:

Другое статистическое значение, степени свободы для геометрического фильтра, также можно использовать при проверке, например, для вычисления вероятности того, что наилучшее найденное решение является правильным решением:

Аналогично, степени свободы для фильтров, не зависящих от геометрии, задаются как

где ne - количество эпох.
Определение коэффициентов
В нижеследующих разделах описано, как выводить различные коэффициенты комбинации кода и несущей  для отдельных фильтров.
для отдельных фильтров.
Свойства комбинаций
Комбинации измерений, представленные ниже, имеют следующие свойства:
- геометрическая с наименьшей ошибкой, ионосферная с наименьшей ошибкой и квинтэссенциальная комбинации попарно не коррелируют;
- корреляцией кодовых комбинаций с геометрической с наименьшей ошибкой, ионосферной с наименьшей ошибкой и квинтэссенциальной комбинациями можно пренебречь, поскольку эффект многолучевого распространения для кода на два или три порядка больше, чем для фазы несущей.
Модели ошибок для комбинаций
Для каждой представленной комбинации характеристики ошибки некоррелируемого шума  , коррелируемого шума
, коррелируемого шума  и постоянной времени
и постоянной времени  можно вычислить с использованием следующих формул:
можно вычислить с использованием следующих формул:
где диагональная матрица содержит отдельные значения дисперсии для каждой частоты, и
Для комбинации кодов несущих характеристики ошибки практически идентичны характеристикам ошибки используемого измерения кода.
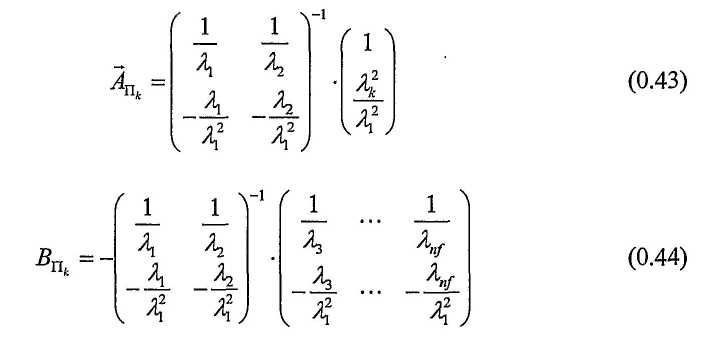
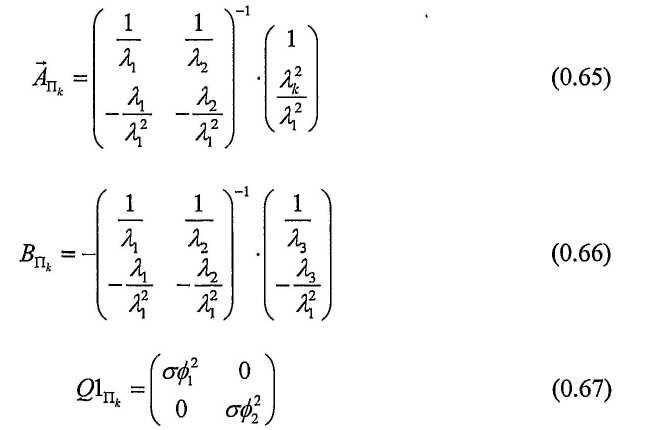
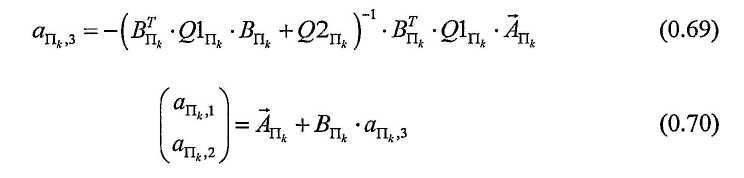
Геометрическая комбинация фаз несущих с наименьшей ошибкой
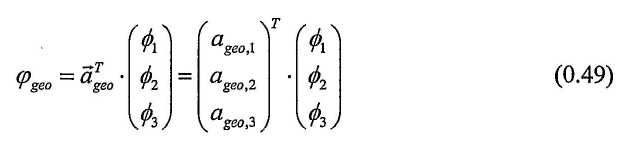
Геометрический фильтр в целом рассмотрен выше. Комбинация фаз несущих с наименьшей ошибкой используется в геометрическом фильтре решений с плавающей точкой. Используемая при этом комбинация фаз несущих задается как
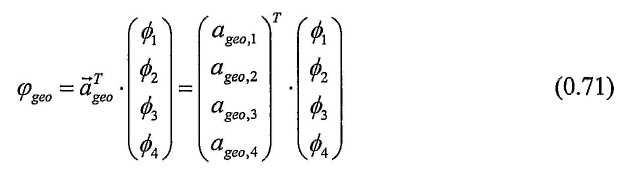
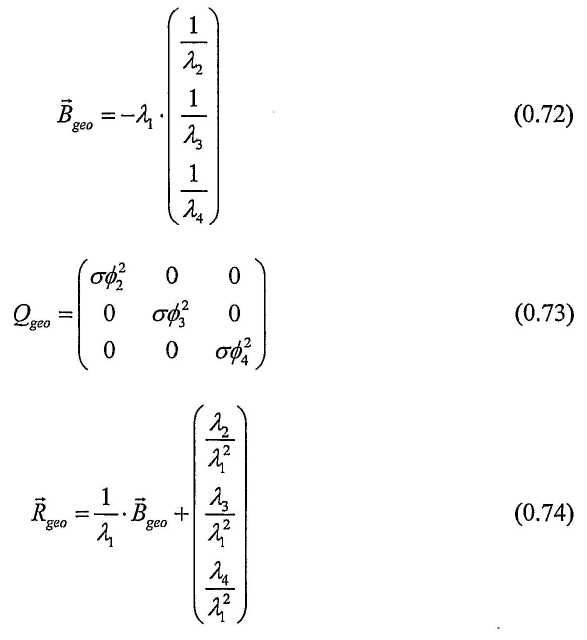
где φgeo - линейная комбинация фаз несущих, αgeo,1 ... αgeo,f - коэффициенты (определены ниже), и ϕ1 ... ϕnf - оригинальные измерения на соответствующих несущих частотах от 1 до n.
Со следующими обозначениями:
где λ1, λ2, ... λnf - длины волны на соответствующих несущих частотах от 1 до n,
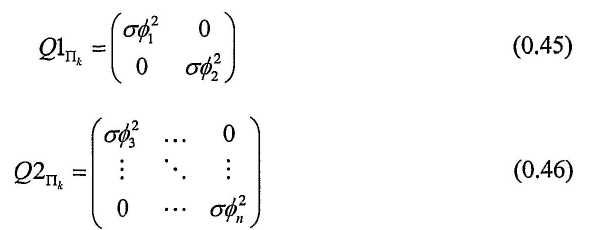
где σϕ2 … σϕnf - среднеквадратические отклонения измерений для несущих частот с 2 по n, в периодах, и
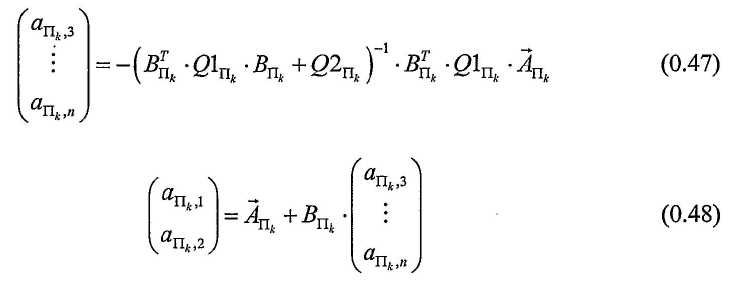
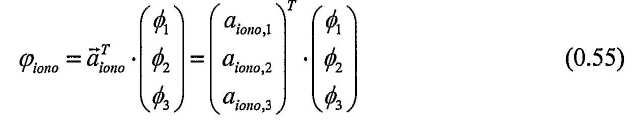
Коэффициенты определяются как

для несущих частот с 2 по n, и как
для несущей частоты 1.
Ионосферная комбинация фаз несущих с наименьшей ошибкой
В ионосферных фильтрах используется ионосферная комбинация фаз несущих с наименьшей ошибкой. Комбинация задается как
где φiono - линейная комбинация фаз несущих, αiono,1 ... αiono,f - коэффициенты (определены ниже), и ϕ1 ... ϕnf - оригинальные измерения на соответствующих несущих частотах от 1 до n.
Со следующими обозначениями:
где коэффициенты определены как
Квинэссенционные комбинации фаз несущих
В фильтрах квинтэссенции используются квинтэссенциальные комбинации фаз несущих. Для nf несущих частот k = 1,…,nf-2 квинтэссенциальных комбинаций фаз несущих задаются как
Со следующими обозначениями:
где коэффициенты определены как
Комбинации кодов несущих
В кодовых фильтрах используются комбинации кодов несущих. Для каждой частоты k одна комбинация задается как

Со следующими обозначениями:
где коэффициенты определены как
Вышеприведенное рассмотрение относится к общему случаю, когда измерения производятся для n несущих частот. Примеры, приведенные ниже, относятся к более простым случаям 3 несущих частот и 4 несущих частот.
Пример коэффициентов: 3 частоты
В нижеследующем примере указаны коэффициенты для случая трех несущих частот.
Геометрическая комбинация фаз несущих с наименьшей ошибкой
Комбинация фаз несущих с наименьшей ошибкой используется в геометрическом фильтре решений с плавающей точкой. Используемая при этом комбинация фаз несущих задается как
Со следующими обозначениями:
где коэффициенты определены как
Ионосферная комбинация фаз несущих с наименьшей ошибкой
В ионосферных фильтрах используется ионосферная комбинация фаз несущих с наименьшей ошибкой. Комбинация задается как
Со следующими обозначениями:
где коэффициенты определены как


Квинтэссенциальная комбинация фаз несущих
где коэффициенты определены как
Комбинации кодов несущих
В кодовых фильтрах используются комбинации кодов несущих. Для каждой частоты k = 1,...,3 одна комбинация задается как
Со следующими обозначениями:

где коэффициенты определены как
Пример коэффициентов: 4 частоты
В нижеследующем примере указаны коэффициенты для случая четырех несущих частот.
Геометрическая комбинация фаз несущих с наименьшей ошибкой
Комбинация фаз несущих с наименьшей ошибкой используется в геометрическом фильтре решений с плавающей точкой. Используемая при этом комбинация фаз несущих задается как
Со следующими обозначениями:
где коэффициенты определены как
Ионосферная комбинация фаз несущих с наименьшей ошибкой
В ионосферных фильтрах используется ионосферная комбинация фаз несущих с наименьшей ошибкой. Комбинация задается как
Со следующими обозначениями:
где коэффициенты определены как:


Квинтэссенциальные комбинации фаз несущих
Для k=1:
где коэффициенты определены как
Для k=2:
где коэффициенты определены как
Комбинации кодов несущих
В кодовых фильтрах используются комбинации кодов несущих. Для каждой частоты k = 1, ..., 4 одна комбинация задается как
Со следующими обозначениями:
где коэффициенты определены как
Объединение выходных массивов фильтров
Операция объединения, например, производимая на объединителе 850, позволяет вычислить полное решение в числах с плавающей точкой для всех спутников и всех частот на основании результатов отдельных фильтров. Полное решение в числах с плавающей точкой состоит из матрицы дисперсии/ковариации, вектора решения в числах с плавающей точкой, статистики χ2 и статистика переопределенности.
Вектор решения
Вектор решения содержит целочисленные неоднозначности значений с плавающей точкой для nf частот и ns спутников (при заданных ns-1 двойных разностях для спутников) в следующем виде:
Дополненные векторы коэффициентов
Векторы коэффициентов задаются для каждого отдельного спутника в соответствии с отдельными двойными разностями. Векторы коэффициентов для полного набора спутников задаются как
Например, для трех частот и четырех спутников / три двойные разности:
Матрица  - это вектор из nf строк, и
- это вектор из nf строк, и  это матрица nf•(ns-1)×(ns-1). Ниже,
это матрица nf•(ns-1)×(ns-1). Ниже,  обозначает дополненный вектор коэффициентов
обозначает дополненный вектор коэффициентов  .
.
Матрица дисперсии/ковариации
Объединенная матрица дисперсии/ковариации представляет собой:

т.е. величину, обратную сумме оценок из геометрического фильтра, ионосферного фильтра, фильтра квинтэссенции и кодового фильтра.
Вектор решения в числах с плавающей точкой
Объединенный вектор неоднозначностей с плавающей точкой представляет собой:

Статистика χ2
Статистика χ2 объединенного решения представляет собой:
Статистика χ2 обеспечивает меру согласованности оценок. Переопределенность создает расхождение между оценками и моделью. Статистика χ2 является взвешенной суммой всех расхождений между всеми измерениями и окончательной моделью.
Статистика переопределенности
Статистика переопределенности, также именуемая степенями свободы, вычисляется следующим образом:

Метод целочисленных наименьших квадратов
Метод целочисленных наименьших квадратов представляет собой семейство общеизвестных алгоритмов для вывода множества целочисленных неоднозначностей  , которое минимизирует функцию
, которое минимизирует функцию

на основании разностей между потенциальным целочисленным решением и объединенным вектором неоднозначностей с плавающей точкой (см. 0.99 выше).
Это оптимальное множество целочисленных неоднозначностей используется как результат разрешения неоднозначности. Проверка осуществляется, как объясняется в следующем разделе.
Согласно одному варианту осуществления, алгоритм LAMBDA используется для достижения наивысшей скорости и эффективности вычислений. См. P. Joosten et al., GNSS Three Carrier Phase Ambiguity Resolution using the LAMBDA-method, Proceedings of the GNSS 1999. Другие алгоритмы также применимы и, при желании, могут использоваться, например, Hatch, FARA, и т.д. Обзор методов разрешения неоднозначности можно найти, например, в P. Misra et al., Global positioning system: signals, measurements, and Performance, Ganja-Jamuna Press, 2001, глава 6, стр. 209-254, и в B. Hofmann-Wellenhof et al., GPS Theory and practice, Springer-Verlag, Fifth Edition, 2001, стр. 213-248.
Проверка
Проверка гарантирует, что оптимальное множество целочисленных неоднозначностей  является правильным решением с достаточной уверенностью. В литературе приведено несколько статистических тестов, которые обеспечивают вероятность правильности решения. Методы проверки неоднозначности рассматриваются, например, в B. Hofmann-Wellenhof et al., GPS Theory and practice, Springer-Verlag, Fifth Edition, 2001, стр. 247-248.
является правильным решением с достаточной уверенностью. В литературе приведено несколько статистических тестов, которые обеспечивают вероятность правильности решения. Методы проверки неоднозначности рассматриваются, например, в B. Hofmann-Wellenhof et al., GPS Theory and practice, Springer-Verlag, Fifth Edition, 2001, стр. 247-248.
Дискриминационный тест университета Куртина
Этот тест использует разность между наилучшим и следующим после наилучшего решениями задачи целочисленных наименьших квадратов, а также матрицу дисперсии/ковариации. См. J. Wang et al., A discrimination test procedure for ambiguity resolution on-the-fly, Journal of geodesy (1998) 72, стр. 644-653.
Сравнительный тест/тест Фишера
Этот тест использует отношение следующего после наилучшего к наилучшему решению. Либо это отношение должно превышать заранее заданное значение (например, 2 или 5 или какое-либо другое выбранное значение), либо применяется дополнительный статистический тест (тест Фишера). См. J. Wang et al., A discrimination test procedure for ambiguity resolution on-the-fly, Journal of Geodesy (1998) 72, стр. 644-653.
Тест ADOP
Этот тест базируется исключительно на матрице дисперсии/ковариации. Вероятность правильности решения вычисляется без проверки фактического решения. См. P.G. Teunissen et al., Ambiguity dilution of precision: Definition, Properties and Application, Proceedings of the ion GPS-97, 16-19 сентября 1997, Канзас-Сити, США, стр. 891-899.
Вычислительные преимущества
Преимущества обработки для вариантов осуществления изобретения обеспечены для очень простых блоков оценки (не моделирующих коррелируемые ошибки), а также для усложненных блоков оценки, использующих методы добавления состояний. Фильтр Калмана с n состояниями имеет вычислительную нагрузку, пропорциональную n3. Это обозначается так: фильтр Калмана с n состояниями имеет вычислительную нагрузку O(n3).
Простой случай
Следующее сравнение основано на вариантах осуществления изобретения, в которых эффекты, коррелируемые по времени, не моделируются. Хотя это не оптимальные режимы работы, приведенное здесь сравнение демонстрирует наихудший сценарий для усовершенствований, обеспечиваемых вариантами осуществления изобретения. Все фильтры настроены на вычисление двойных разностей, что также неблагоприятно в отношении гибкости реализации.
Полный фильтр согласно уровню техники
Подход полного фильтра согласно уровню техники предусматривает использование следующих состояний:
- 3 состояния позиции
- nf × (ns-1) состояний неоднозначности
В результате, вычислительная нагрузка имеет порядок

Фильтры согласно вариантам осуществления настоящего изобретения
Фильтры и способы фильтрации согласно вариантам осуществления настоящего изобретения имеют следующую вычислительную нагрузку:
Геометрический фильтр
- 3 состояния позиции
- ns-1 состояний неоднозначности

Ионосферные фильтры
Если используется фильтр с методом вычисления разности, то банк ионосферных фильтров состоит из ns-1 отдельных фильтров Калмана с 1 состоянием.

Фильтры квинтэссенции
Если используется фильтр с методом вычисления разности, то один банк фильтров квинтэссенции состоит из ns-1 отдельных фильтров Калмана с 1 состоянием, и используются nf-2 банков фильтров квинтэссенции:

Кодовые фильтры
Простые кодовые фильтры используют только состояние неоднозначности.

Общая вычислительная нагрузка
В целом, суммарная вычислительная нагрузка геометрического фильтра, ионосферных фильтров, фильтров квинтэссенции и кодовых фильтров для простого случая (без моделирования коррелируемых ошибок) такова:

Сравнение
В нижеследующей таблице приведены примеры вычислительной нагрузки и коэффициента выигрыша для простого случая согласно вариантам осуществления настоящего изобретения по сравнению с формализмом полного фильтра согласно уровню техники.
Случай полного моделирования
Следующее сравнение основано на вариантах осуществления изобретения, в которых эффекты, коррелируемые по времени, моделируются, и использует одинарные разности.
Полный фильтр
Подход полного фильтра предусматривает использование следующих состояний:
- 3 состояния позиции
- 1 состояние ошибки часов приемника
- nf . ns состояний неоднозначности
- nf . ns состояний многолучевого распространения кода
- nf . ns состояний многолучевого распространения несущей
- nf . ns состояний ионосферы
В результате, вычислительная нагрузка имеет порядок

Фильтры согласно вариантам осуществления настоящего изобретения
Фильтры и способы фильтрации согласно вариантам осуществления настоящего изобретения имеют следующую вычислительную нагрузку:
Геометрический фильтр
- 3 состояния позиции
- 1 состояние ошибки часов приемника
- ns состояний неоднозначности
- ns состояний многолучевого распространения

Ионосферные фильтры
Если используется фильтр с методом вычисления разности, то банк ионосферных фильтров состоит из ns отдельных фильтров Калмана с 1 состоянием.

Фильтры квинтэссенции
Если используется фильтр с методом вычисления разности, то один банк фильтров квинтэссенции состоит из ns отдельных фильтров Калмана с 1 состоянием, и используются nf-2 банков фильтров квинтэссенции:

Кодовые фильтры
Для получения наилучших результатов кодовые фильтры используют состояние неоднозначности и состояние многолучевого распространения для одновременного моделирования шума и коррелируемых ошибок.

Общая вычислительная нагрузка
В целом, суммарная вычислительная нагрузка геометрического фильтра, ионосферных фильтров, фильтров квинтэссенции и кодовых фильтров для вариантов осуществления изобретения, в которых моделируются эффекты, коррелируемые по времени, и используются одинарные разности, такова:

Сравнение
В нижеследующей таблице приведены примеры нагрузки и коэффициента выигрыша полного моделирования согласно вариантам осуществления настоящего изобретения по сравнению с формализмом полного фильтра согласно уровню техники.
Смешанное сравнение
Обработка согласно вариантам осуществления настоящего изобретения обеспечивает преимущество для трех или более несущих частот даже при сравнении вариантов осуществления изобретения полного моделирования со случаем простого моделирования для полных фильтров уровня техники. Таким образом, варианты осуществления изобретения могут обеспечивать усовершенствованную обработку (полное моделирование вместо простого моделирования), в то же время обеспечивая снижение вычислительной нагрузки по сравнению с полными фильтрами уровня техники для трех или более несущих частот.
Для двух частот, переход к полному моделированию имеет весьма небольшое влияние при осуществлении с использованием методов согласно вариантам осуществления настоящего изобретения по сравнению с подходом полного фильтра с простым моделированием согласно уровню техники. Для трех или четырех частот, имеет еще и повышение скорости.
Обработка множественных GNSS
Представленные способы применимы к данным от множественных GNSS. Например, набор данных GPS и набор данных Galileo можно обрабатывать согласно вариантам осуществления настоящего изобретения. Частоты, а следовательно, и комбинации, определяются отдельно для каждой спутниковой навигационной системы. Кроме того, для каждой GNSS выбирается опорный спутник, причем для каждой системы применяется оператор вычисления двойной разности. Производительность объединенной спутниковой навигационной системы значительно повышается по сравнению с отдельной GNSS. Это обеспечивает доступность, надежность и точность расчетных позиций.
На фиг.22 показан пример архитектуры фильтрации согласно вариантам осуществления настоящего изобретения. Набор 2205 данных сигнала GNSS для трех или более несущих частот из первой GNSS (например, набор данных Galileo или набор данных модернизированной GPS) поступает от подходящего приемника GNSS. Набор 2210 данных сигнала GNSS для двух или более несущих частот из второй GNSS (например, набор данных двухчастотной или трехчастотной GPS, набор данных двухчастотной Glonass или набор данных трехчастотной или четырехчастотной Galileo) поступает от подходящего приемника GNSS. Необязательный элемент 2215 вычисления коэффициентов вычисляет коэффициенты для фильтров первой GNSS.
Набор 2205 данных GNSS и коэффициенты от элемента 2215, если обеспечиваются, поступают на ионосферный фильтр 2235, не зависящий от геометрии, на один или несколько банков 2240 фильтров квинтэссенции, имеющих по одному фильтру на отслеживаемый спутник первой GNSS, и от одного до nf кодовых фильтров 2245. Количество банков 2240 фильтров квинтэссенции на два меньше, чем количество несущих частот первой GNSS. Набор 2210 данных GNSS и коэффициенты от элемента 2220, если обеспечиваются, поступают на ионосферный фильтр 2250, не зависящий от геометрии, на банк 2255 фильтров квинтэссенции, имеющих по одному фильтру на отслеживаемый спутник первой GNSS, и от одного до nf кодовых фильтров 2245. Количество банков 2255 фильтров квинтэссенции на два меньше, чем количество несущих частот второй GNSS; если вторая GNSS имеет только две несущих частоты, то ни один банк 2255 фильтров квинтэссенции не обеспечивается.
Согласно варианту осуществления, показанному на фиг.22, один геометрический фильтр 2265 является общим для первой GNSS и второй GNSS, поскольку они определяют одну и ту же позицию антенны. Таким образом, набор данных GNSS 2205 и коэффициенты от элемента 2215, поступают на геометрический фильтр 2265, и набор данных GNSS 2210 и коэффициенты от элемента 2220, поступают на геометрический фильтр 2265.
На фиг.23 показан способ, соответствующий архитектуре, показанной на фиг.22. На этапе 2305 геометрический фильтр 2265 применяется к набору 2205 данных первой GNSS и к набору 2210 данных второй GNSS с использованием геометрической комбинации фаз несущих для получения массива 2308 оценок неоднозначности для геометрической комбинации фаз несущих и соответствующей статистической информации. На этапе 2310 банк 2240 ионосферных фильтров применяется к набору 2205 данных первой GNSS с использованием ионосферной, не зависящей от геометрии, комбинации фаз несущих для получения массива 2315 оценок неоднозначности для ионосферной комбинации фаз несущих и соответствующей статистической информации. На этапе 2320 банк или банки 2240 фильтров квинтэссенции применяются к набору 2205 данных первой GNSS с использованием не зависящей от геометрии и не зависящей от ионосферы комбинации фаз несущих для получения массива 2325 оценок неоднозначности для комбинации фаз несущих, не зависящей от геометрии и не зависящей от ионосферы, и соответствующей статистической информации. На этапе 2330 кодовый фильтр или фильтры 2245 применяются к набору данных 2205 первой GNSS с использованием совокупности комбинаций кодов несущих, не зависящих от геометрии и не зависящих от ионосферы, для получения массива 2335 оценок неоднозначности для комбинаций кодов несущих и соответствующей статистической информации для совокупности передатчиков.
На этапе 2340 банк 2250 ионосферных фильтров применяется к набору данных 2210 второй GNSS с использованием ионосферной, не зависящей от геометрии, комбинации фаз несущих для получения массива 2345 оценок неоднозначности для ионосферной комбинации фаз несущих и соответствующей статистической информации. На этапе 2350 банк или банки 2255 фильтров квинтэссенции, если обеспечены, применяются к набору 2210 данных второй GNSS с использованием не зависящей от геометрии и не зависящей от ионосферы комбинации фаз несущих для получения массива 2355 оценок неоднозначности для комбинации фаз несущих, не зависящей от геометрии и не зависящей от ионосферы, и соответствующей статистической информации. На этапе 2360 кодовый фильтр или фильтры 2260 применяется к набору данных 2210 второй GNSS с использованием совокупности комбинаций кодов несущих, не зависящих от геометрии и не зависящих от ионосферы, для получения массива 2365 оценок неоднозначности для комбинаций кодов несущих и соответствующей статистической информации для совокупности передатчиков.
Совокупность массивов объединяется на этапе 2370 элементом 2270 для создания объединенного массива 2375 оценок неоднозначности для всех наблюдений фазы несущей первой GNSS и второй GNSS и соответствующей статистической информации. Для достижения вычислительной эффективности коэффициенты 2380 могут вычисляться на этапе 2385 для набора данных 2205, и коэффициенты 2390 могут вычисляться на этапе 2390 для набора 2210 данных. В случае отдельного вычисления, которое показано, коэффициенты 2380 и 2390 поступают на указанные фильтры.
Хотя архитектура, показанная на фиг.22, использует один геометрический фильтр 2265, общий для первой GNSS и второй GNSS, при желании можно применять отдельные геометрические фильтры для первой GNSS и второй GNSS. На фиг.24 показан способ, согласно которому используются отдельные геометрические фильтры. Элементы на фиг.22, 23 и 24, обозначенные аналогичными позициями, представляют сходные данные и процессы. Согласно фиг.24, геометрический фильтр 2410 применяется к набору 2205 данных первой GNSS с использованием геометрической комбинации фаз несущих для получения массива 2415 оценок неоднозначности для геометрической комбинации фаз несущих и соответствующей статистической информации. Аналогично, геометрический фильтр 2420 применяется к набору 2205 данных второй GNSS с использованием геометрической комбинации фаз несущих для получения массива 2425 оценок неоднозначности для геометрической комбинации фаз несущих и соответствующей статистической информации. Массивы 2315, 2325, 2335, 2345, 2355, 2365, 2415 и 2425 объединяются на этапе 2430 для создания объединенного массива 2440 оценок неоднозначности для всех наблюдений фазы несущей первой GNSS и второй GNSS и соответствующей статистической информации.
Смешанные количества частот
Варианты осуществления изобретения можно применить к GNSS, состоящей из спутников, передающих на разных количествах частот, например, несколько спутников передают на двух, а остальные на трех частотах. Это может происходить вследствие возможностей спутников или в силу ограничений текущей ситуации передачи/приема.
Для обработки смешанных количеств частот коэффициенты подготавливаются для наименьшего доступного количества частот. Дополнительная информация от спутников, передающих больше частот, учитывается комбинациями фильтров квинтэссенции, которые доступны для, по меньшей мере, трех частот и не зависят от полного количества частот. Кроме того, опорный спутник выбирается из спутников с максимальным доступным количеством частот.
Это делается потому, что система Galileo будет с самого начала обеспечивать три или четыре частоты, тогда как модернизация GPS, конечной целью которой является обеспечение трех частот (не четырех) будут вводиться в течение многих лет по мере того, как некоторые спутники будут обновляться до трех частот, тогда как на других останется только две частоты. В недалеком будущем будут обычно использоваться две несущие GPS и три или четыре несущие Galileo, тогда как в более отдаленной перспективе будут использоваться три частоты GPS и три или четыре частоты Galileo.
Статическая обработка
Способы и устройство согласно вариантам осуществления настоящего изобретения применимы для статического позиционирования. Для статического позиционирования геометрическое решение в числах с плавающей точкой моделирует один набор координат позиции, а не одну позицию на эпоху.
Сетевое позиционирование GNSS
Для обработки данных с использованием множественных опорных станций неоднозначности расширяются для моделирования всех двойных разностей от пользовательского приемника на каждый опорный приемник.
Обработка множественных опорных станций
Вычислительная эффективность представленного подхода открывает еще одну важную инновацию - обработку множественных опорных станций. Продукты RTK, имеющиеся сегодня на рынке, обрабатывают единомоментно поток данных только от одной опорной станции. Возможность одновременной обработки потоков данных более одной опорной станции согласно вариантам осуществления настоящего изобретения дает одно или несколько преимуществ:
1. Точность - источники ошибок, локальные по отношению к одной опорной станции, имеют тенденцию к усреднению, когда одновременно обрабатывается несколько опорных станций.
2. Целостность - результаты, полученные от одной опорной станции, допускают перекрестную проверку посредством результатов от другой опорной станции. В настоящее время, переключение между опорными станциями осуществляется вручную.
3. Повышенная производительность разрешения неоднозначности - надежность и скорость, с которой можно разрешать неоднозначности фаз несущих, повышается, когда источники пространственных ошибок хорошо смоделированы. При использовании множественных опорных станций для обработки наблюдений GPS на роверной станции источники атмосферной ошибки удается лучше моделировать, чем при наличии одной опорной станции.
Обработка множественных роверов
Обработка для множественных роверов реализуется путем добавления всех неоднозначностей ко всем роверам. Это позволяет применять варианты осуществления изобретения к многороверным приложениям, например, определению ориентации отвала машины для земляных работ, в которой, например, ровер установлен на каждом конце отвала.
Точное точечное позиционирование
При точном точечном позиционировании используются необработанные данные, соответствующие разностям между спутниками только для одного приемника.
Обработка сетевой поправки
При обработке сетевой поправки используется разрешение неоднозначности для множественных опорных станций. Неоднозначности между всеми станциями разрешаются. Варианты осуществления изобретения позволяют делать это. Все позиции заранее определены и не подлежат моделированию; поскольку все позиции опорных станций известны, решение в числах с плавающей точкой не содержит состояния позиции.
Последующая обработка
Хотя представленные варианты осуществления предусматривают работу в реальном времени, альтернативные варианты осуществления изобретения также можно применять путем сбора данных в реальном времени, и затем обработки всех данных, собранных в пакет (последующей обработки). Это применяется ко всем вышеописанным режимам обработки.
Мгновенное разрешение неоднозначности
Вышеописанные варианты осуществления определены для множественных эпох данных, используемых в фильтрах. Тем не менее, вариант осуществления изобретения работает не только для одной эпохи данных (мгновенно). Если проверка успешна, точные позиции можно вычислить непосредственно из одной эпохи данных. Преимуществом этого подхода является нечувствительность к сдвигам периодов или потере захвата при отслеживании спутником. Модифицированная логическая блок-схема для мгновенного разрешения неоднозначности описана выше со ссылкой на фиг.17.
Архитектура приемника
На фиг.25 показана архитектура приемника 2500 GNSS согласно варианту осуществления настоящего изобретения. Антенна 2505 принимает сигналы GNSS, имеющие более двух несущих частот, например, сигналы Galileo, имеющие три или четыре несущие частоты, или сигналы модернизированной GPS, имеющие три несущие частоты. Принятый сигнал проходит через малошумящий усилитель 2510, и усиленный сигнал проходит через делитель 2515 сигнала на совокупность понижающих преобразователей 2520, 2525, ... 2530 радиочастотного диапазона. На понижающий преобразователь поступает опорная частота от опорного генератора 2535.
Понижающий преобразователь 2520 снижает первый диапазон сигнала GNSS до низкочастотного сигнала, который цифруется аналого-цифровым преобразователем 2540. Понижающий преобразователь 2525 снижает второй диапазон сигнала GNSS до низкочастотного сигнала, который цифруется аналого-цифровым преобразователем 2545. Понижающий преобразователь 2530 снижает n-й диапазон сигнала GNSS до низкочастотного сигнала, который цифруется аналого-цифровым преобразователем 2550.
Оцифрованный сигнал GNSS первого диапазона обрабатывается банком каналов 2560 детектирования и слежения, имеющим по одному каналу на спутник или псевдоспутник GNSS, отслеживаемый приемником 2500. Результирующие измерения фазы несущей и псевдодальности для первого диапазона поступают на один или несколько процессоров 2575. Оцифрованный сигнал GNSS второго диапазона обрабатывается банком каналов детектирования и слежения 2565 имеющим по одному каналу на спутник или псевдоспутник GNSS, отслеживаемый приемником 2500. Результирующие измерения фазы несущей и псевдодальности для второго диапазона поступают на один или несколько процессоров 2575. Оцифрованный сигнал GNSS n-го диапазона обрабатывается банком 2570 каналов детектирования и слежения, имеющим по одному каналу на спутник или псевдоспутник GNSS, отслеживаемый приемником 2500. Результирующие измерения фазы несущей и псевдодальности для n-го диапазона поступают на один или несколько процессоров 2575. Соответствующий понижающий преобразователь, аналого-цифровой преобразователь и банк каналов детектирования и слежения обеспечены для каждого диапазона несущей частоты сигналов GNSS; для удобства иллюстрации, на фиг.25 показаны только три.
В одном или нескольких процессорах 2575 реализована архитектура фильтра с разложением на 3+ несущих 2580, которая, в ходе работы, выполняет процесс 2585. Процесс 2585 обрабатывает данные сигнала GNSS, содержащие измерения фазы несущей и псевдодальности для каждого из трех или более диапазонов сигнала GNSS для каждого из передатчиков, отслеживаемых приемником 2500. Архитектура фильтра 2580 содержит архитектуру фильтра с разложением согласно одному или нескольким вариантам осуществления настоящего изобретения, например, описанным со ссылкой на фиг.8-14. Процесс 2585 содержит метод обработки с разложением согласно одному или нескольким вариантам осуществления изобретения, например, описанным со ссылкой на фиг. 6-7 и 15-21. Один или несколько процессоров 2575 могут быть реализованы как единичный процессор или как множественные процессоры, и могут являться программируемыми процессорами общего назначения и/или процессорами специального назначения.
Процесс 2585 создает один или несколько типов выходных данных, а именно: объединенный массив 2590 оценок неоднозначности для всех наблюдений фазы несущей и соответствующей статистической информации; позицию 2595; и/или поток форматированных многодиапазонных данных кинематики в реальном времени (RTK) 2598. Объединенный массив 2590 соответствует, например, одному из вышеописанных массивов 625, 725, 855, 1865. Позиция 2595 соответствует, например, одной из вышеописанных позиций 635, 735, 1920, 2020. Поток данных 2598 может иметь любой формат, пригодный для использования в оборудовании позиционирования RTK.
На фиг.26 показана архитектура приемника GNSS 2600 согласно варианту осуществления настоящего изобретения. Антенна 2605 принимает сигналы GNSS, имеющие более двух несущих частот, например, сигналы Galileo, имеющие три или четыре несущие частоты, или сигналы модернизированной GPS, имеющие три несущие частоты. Принятый сигнал проходит через малошумящий усилитель 2610, и усиленный сигнал поступает на модуль 2615, который осуществляет понижающее преобразование от радиочастоты и оцифровку многополосного сигнала.
Оцифрованный многополосный сигнал обрабатывается банком каналов детектирования и слежения 2620, имеющим по одному каналу на спутник или псевдоспутник GNSS, отслеживаемый приемником 2600. Результирующие измерения фазы несущей и псевдодальности для каждого диапазона поступают на один или несколько процессоров 2625. Опорный генератор 2622 обеспечивает опорную частоту для понижающего преобразования и слежения.
В одном или нескольких процессорах 2625 реализована архитектура фильтра 2630 с разложением на 3+ несущих, которая в ходе работы выполняет процесс 2635. Процесс 2635 обрабатывает данные сигнала GNSS, содержащие измерения фазы несущей и псевдодальности для каждого из трех или более диапазонов сигнала GNSS для каждого из передатчиков, отслеживаемых приемником 2600. Архитектура фильтра 2630 содержит архитектуру фильтра с разложением согласно одному или нескольким вариантам осуществления настоящего изобретения, например, описанным со ссылкой на фиг.8-14. Процесс 2635 содержит метод обработки с разложением согласно одному или нескольким вариантам осуществления изобретения, например, описанным со ссылкой на фиг. 6-7 и 15-21. Один или несколько процессоров 2625 могут быть реализованы как единичный процессор или как множественные процессоры, и могут являться программируемыми процессорами общего назначения и/или процессорами специального назначения.
Процесс 2635 создает один или несколько типов выходных данных, а именно: объединенный массив 2640 оценок неоднозначности для всех наблюдений фазы несущей и соответствующей статистической информации; позицию 2645; и/или поток форматированных многодиапазонных данных кинематики в реальном времени (RTK) 2650. Объединенный массив 2640 соответствует, например, одному из вышеописанных массивов 625, 725, 855, 1865. Позиция 2645 соответствует, например, одной из вышеописанных позиций 635, 735, 1920, 2020. Поток данных 2650 может иметь любой формат, пригодный для использования в оборудовании позиционирования RTK.
На фиг.27 показана архитектура приемника 2700 GNSS согласно варианту осуществления настоящего изобретения. Антенна 2705 принимает сигналы GNSS, имеющие более двух несущих частот, например, сигналы Galileo, имеющие три или четыре несущие частоты, или сигналы модернизированной GPS, имеющие три несущие частоты. Принятый сигнал проходит через малошумящий усилитель 2710, и усиленный сигнал поступает на модуль 2715, который непосредственно цифрует многополосный сигнал.
Оцифрованные сигналы обрабатываются банком каналов 2730 детектирования и слежения, имеющим по одному каналу на спутник или псевдоспутник GNSS, отслеживаемый приемником 2700. Результирующие измерения фазы несущей и псевдодальности для каждого диапазона поступают на один или несколько процессоров 2740. Опорный генератор 2720 обеспечивает опорную частоты для понижающего преобразования и слежения.
В одном или нескольких процессорах 2740 реализована архитектура фильтра 2745 с разложением на 3+ несущих, которая, в ходе работы, выполняет процесс 2750. Процесс 2750 обрабатывает данные сигнала GNSS, содержащие измерения фазы несущей и псевдодальности для каждого из трех или более диапазонов сигнала GNSS для каждого из передатчиков, отслеживаемых приемником 2700. Архитектура фильтра 2745 содержит архитектуру фильтра с разложением согласно одному или нескольким вариантам осуществления настоящего изобретения, например, описанным со ссылкой на фиг.8-14. Процесс 2750 содержит метод обработки с разложением согласно одному или нескольким вариантам осуществления изобретения, например, описанным со ссылкой на фиг. 6-7 и 15-21. Один или несколько процессоров 2740 могут быть реализованы как единичный процессор или как множественные процессоры, и могут являться программируемыми процессорами общего назначения и/или процессорами специального назначения.
Процесс 2750 создает один или несколько типов выходных данных, а именно: объединенный массив 2750 оценок неоднозначности для всех наблюдений фазы несущей и соответствующей статистической информации; позицию 2755; и/или поток форматированных многодиапазонных данных кинематики в реальном времени (RTK) 2760. Объединенный массив 2750 соответствует, например, одному из вышеописанных массивов 625, 725, 855, 1865. Позиция 2755 соответствует, например, одной из вышеописанных позиций 635, 735, 1920, 2020. Поток данных 2760 может иметь любой формат, пригодный для использования в оборудовании позиционирования RTK.
На фиг.28 показана архитектура приемника GNSS 2800 согласно варианту осуществления настоящего изобретения. Приемник 2800 подобен по структуре показанному на фиг.25, но имеет дополнительные каналы для приема и обработки сигналов второй GNSS. Антенна 2805 принимает сигналы первой GNSS, имеющей более двух несущих частот, например, сигналы Galileo, имеющие три или четыре несущих частоты, или модернизированной GPS, имеющей три несущих частоты, и сигналы второй GNSS, имеющей, по меньшей мере, две несущих частоты, например, сигналы GPS, модернизированной GPS и Glonass. Принятые сигналы проходят через малошумящий усилитель 2510, и усиленные сигналы проходят через делитель 2815 сигнала на совокупность понижающих преобразователей 2520, 2525, ... 2530 для первой GNSS и на совокупность понижающих преобразователей 2820, 2825, ..., 2830 радиочастотного диапазона для второй GNSS. На понижающие преобразователи поступает опорная частота от опорных генераторв 2835.
Понижающий преобразователь 2520 снижает первый диапазон сигнала первой GNSS до низкочастотного сигнала, который цифруется аналого-цифровым преобразователем 2540. Понижающий преобразователь 2525 снижает второй диапазон сигнала первой GNSS до низкочастотного сигнала, который цифруется аналого-цифровым преобразователем 2545. Понижающий преобразователь 2530 снижает n-й диапазон сигнала первой GNSS до низкочастотного сигнала, который цифруется аналого-цифровым преобразователем 2550. Понижающий преобразователь 2820 снижает первый диапазон сигнала второй GNSS до низкочастотного сигнала, который цифруется аналого-цифровым преобразователем 2840. Понижающий преобразователь 2825 снижает второй диапазон сигнала второй GNSS до низкочастотного сигнала, который цифруется аналого-цифровым преобразователем 2845. Понижающий преобразователь 2830 n-й диапазон сигнала второй GNSS до низкочастотного сигнала, который цифруется аналого-цифровым преобразователем 2850, при условии, что сигнал второй GNSS имеет более двух диапазонов.
Оцифрованный сигнал первого диапазона сигнала первой GNSS обрабатывается банком каналов 2560 детектирования и слежения имеющим по одному каналу на спутник или псевдоспутник GNSS, отслеживаемый приемником 2800. Результирующие измерения фазы несущей и псевдодальности для первого диапазона сигнала первой GNSS поступают на один или несколько процессоров 2875. Оцифрованный сигнал второго диапазона сигнала первой GNSS обрабатывается банком каналов 2565 детектирования и слежения имеющим по одному каналу на спутник или псевдоспутник GNSS, отслеживаемый приемником 2800. Результирующие измерения фазы несущей и псевдодальности для второго диапазона сигнала первой GNSS поступают на один или несколько процессоров 2875. Оцифрованный сигнал n-го диапазона первой GNSS обрабатывается банком каналов 2570 детектирования и слежения, имеющим по одному каналу на спутник или псевдоспутник GNSS, отслеживаемый приемником 2800. Результирующие измерения фазы несущей и псевдодальности для n-го диапазона поступают на один или несколько процессоров 2875. Соответствующий понижающий преобразователь, аналого-цифровой преобразователь и банк каналов детектирования и слежения обеспечены для каждого диапазона несущей частоты сигналов первой GNSS; для удобства, на фиг.28 показаны только три.
Оцифрованный сигнал первого диапазона сигнала второй GNSS обрабатывается банком каналов 2860 детектирования и слежения, имеющим по одному каналу на спутник или псевдоспутник GNSS, отслеживаемый приемником 2800. Результирующие измерения фазы несущей и псевдодальности для первого диапазона сигнала второй GNSS поступают на один или несколько процессоров 2875. Оцифрованный сигнал второго диапазона сигнала второй GNSS обрабатывается банком каналов 2865 детектирования и слежения, имеющим по одному каналу на спутник или псевдоспутник GNSS, отслеживаемый приемником 2800. Результирующие измерения фазы несущей и псевдодальности для второго диапазона сигнала второй GNSS поступают на один или несколько процессоров 2875. Оцифрованный сигнал n-го диапазона сигнала второй GNSS обрабатывается банком каналов 2870 детектирования и слежения, имеющим по одному каналу на спутник или псевдоспутник GNSS, отслеживаемый приемником 2800. Результирующие измерения фазы несущей и псевдодальности для n-го диапазона поступают на один или несколько процессоров 2875. Соответствующий понижающий преобразователь, аналого-цифровой преобразователь и банк каналов детектирования и слежения обеспечены для каждого диапазона несущей частоты сигналов второй GNSS; хотя на фиг.28 каждый из них показан в количестве трех, если вторая GNSS имеет только два диапазона несущей, то обеспечиваются только два.
В одном или нескольких процессорах 2575 реализована архитектура фильтра с разложением на 3+ несущих 2880, которая в ходе работы выполняет процесс 2885. Процесс 2585 обрабатывает данные сигнала, содержащие измерения фазы несущей и псевдодальности для каждого из трех или более диапазонов сигнала первой GNSS и для каждого из двух или более диапазонов сигнала второй GNSS для каждого из передатчиков, отслеживаемых приемником 2500. Архитектура 2880 фильтра содержит архитектуру фильтра с разложением согласно одному или нескольким вариантам осуществления настоящего изобретения, например, описанную со ссылкой на фиг. 22. Процесс 2885 содержит метод обработки с разложением согласно одному или нескольким вариантам осуществления изобретения, например, описанный со ссылкой на фиг. 23 и 24. Один или несколько процессоров 2875 могут быть реализованы как единичный процессор или как множественные процессоры и могут являться программируемыми процессорами общего назначения и/или процессорами специального назначения.
Процесс 2885 создает один или несколько типов выходных данных, а именно: объединенный массив 2890 оценок неоднозначности для всех наблюдений фазы несущей и соответствующей статистической информации; позицию 2895; и/или поток форматированных многодиапазонных данных кинематики в реальном времени (RTK) 2898. Объединенный массив 2890 соответствует, например, одному из вышеописанных массивов 2375 или 2440. Поток данных 2898 может иметь любой формат, пригодный для использования в оборудовании позиционирования RTK.
Приложения RTK
Варианты осуществления способов и устройства, отвечающих изобретению, можно использовать для получения преимуществ в приложениях RTK.
На фиг.29 показан вариант осуществления процессора 2905 опорного приемника для подготовки потока форматированных многодиапазонных данных RTK, например, указанного на фиг. 25-28. Измерения фазы несущей и псевдодальности для каждого из диапазонов 1, 2, ... n GNSS собираются, например, в блоках 2910, 2915, ... 2920 памяти. Часы опорного приемника выдают сигнал времени на блок 2925, который обеспечивает метки времени для каждой эпохи данных измерений, например, с интервалом 0,1 секунды. Набор данных для каждой эпохи поступает из блоков 2910, 2915,... 2920 памяти на необязательный элемент 2935 сжатия данных.
На элемент 2935 сжатия данных также поступает известная или вычисленная позиция 2930 опорного приемника, которая используется в позиционировании методом RTK для вычисления вектора от опорного приемника к роверу. Сжатие данных позволяет минимизировать служебную нагрузку передачи (время и/или затраты) или позволяет оптимизировать скорость передачи данных для минимальной ширины полосы. Элемент 2935 сжатия данных выдает поток форматированных многодиапазонных данных RTK. Необязательная линия 2940 передачи данных, например, линия радиосвязи, интернет-соединение, модуляция FM-поднесущей, линия связи сотового телефона или другая линия связи, передает необработанные наблюдаемые опорного приемника на ровер в виде потока форматированных многодиапазонных данных RTK. Необработанные наблюдаемые опорного приемника обрабатываются на ровере с использованием фильтров разрешения неоднозначности 3+ несущих с разложением согласно вариантам осуществления настоящего изобретения, например, описанных выше.
На фиг.30 показан вариант осуществления процессора 3005 опорного приемника для подготовки многодиапазонного потока данных RTK множественных GNSS, например, показанного на фиг.28. Измерения фазы несущей и псевдодальности для каждого из диапазонов 1, 2, ..., n первой GNSS собираются, например, в блоках 3010, 3015, ... 3020 памяти. Измерения фазы несущей и псевдодальности для каждого из диапазонов 1, 2, ... n второй GNSS собираются, например, в блоках 3025, 3030,... 3035 памяти. Часы опорного приемника выдают сигнал времени на блок 3040, который обеспечивает метки времени для каждой эпохи данных измерений, например, с интервалом 0,1 секунды. Набор данных для каждой эпохи поступает из блоков 3010, 3015,... 3020 памяти для первой GNSS и из блоков 3025, 3030,... 3035 памяти для второй GNSS на необязательный элемент 3050 сжатия данных.
На элемент 3050 сжатия данных также поступает известная или вычисленная позиция 3045 опорного приемника, которая используется в позиционировании методом RTK для вычисления вектора от опорного приемника к роверу. Сжатие данных позволяет минимизировать служебную нагрузку передачи (время и/или затраты) или позволяет оптимизировать скорость передачи данных для минимальной ширины полосы. Элемент 3050 сжатия данных выдает поток форматированных многодиапазонных данных RTK для первой GNSS и второй GNSS. Элемент 3050 сжатия данных выдает поток форматированных многодиапазонных данных RTK. Необязательная линия передачи данных, например, линия радиосвязи, Интернет-соединение, модуляция FM-поднесущей, линия связи сотового телефона или другая линия связи, передает необработанные наблюдаемые опорного приемника на ровер в виде потока форматированных многодиапазонных данных RTK. Необработанные наблюдаемые опорного приемника обрабатываются на ровере с использованием фильтров разрешения неоднозначности 3+ несущих с разложением согласно вариантам осуществления настоящего изобретения, например, описанных выше.
На фиг.31 показан режим работы согласно вариантам осуществления настоящего изобретения, в котором применяется одна опорная станция. Опорный приемник 3105 выдает данные 3110 опорной станции, например, поток форматированных многодиапазонных данных RTK, обеспечиваемый процессором 2905 на фиг.29 или процессором 2035 на фиг.30. Данные опорной станции обеспечиваются, например, через подходящую линию передачи данных. Приемник 3115 ровера содержит подходящие элементы для приема данных 3110 опорной станции, например, антенну 3120 линии передачи данных и электронику 3125 для приема и демодуляции сигнала линии передачи данных и для подачи данных 3110 опорной станции на процессор 3130 ровера. Если данные опорной станции 3105 сжимаются для эффективной передачи по линии передачи данных, то элемент 3125 снятия сжатия данных в приемнике 3115 ровера снимает сжатие данных опорной станции для использования одним или несколькими дополнительными элементами обработки в процессоре 3130.
Приемник 3115 ровера дополнительно включает в себя антенну 3140 для приема сигналов GNSS, имеющих три или более несущих частот, и подходящую электронику 3145 для приема и демодуляции сигнала для создания данных 3145 фазы несущей и псевдодальности приемника ровера 3+ для использования в процессоре ровера 3130. Процессор ровера 3130 включает в себя элемент 3150 синхронизации фазы несущей и псевдодальности для множественных диапазонов, который синхронизирует данные 3145 приемника ровера с данными 3110 опорной станции для использования в элементе 3155 вычисления позиции методом RTK на множественных диапазонах. Вычислительный элемент 3160 использует данные 3110 опорной станции для вычисления позиции опорной станции и предоставления ее совместно с описанием опорной станции элементу 3155 вычисления позиции. Необязательный вычислительный элемент 3165 вычисляет атмосферные и спутниковые поправки для использования элементом 3155 вычисления позиции. Вычислительный элемент 3155 вычисляет оценки позиции RTK приемник ровера 3115 и выдает в качестве выходных данных позицию RTK и информацию статуса 3170.
На фиг.32 показан режим работы согласно вариантам осуществления настоящего изобретения, в котором используется совокупность опорных станций, образующая сеть. Каждый из опорных приемников 3205, 3210, 3215 выдает данные опорной станции, например, поток форматированных многодиапазонных данных RTK, обеспечиваемые процессором 2905 на фиг.29 или процессором 2035 на фиг.30, на сетевой сервер RTK 3220. Сетевой сервер RTK 3220 генерирует спутниковые и атмосферные поправки и выдает их совместно с данными опорной станции, например, как поток многодиапазонных поправок 3225 сети RTK, для использования одним или несколькими приемниками ровера, например, приемником 3115 ровера. Многодиапазонные поправки 3225 сети RTK обеспечиваются, например, для использования в режиме виртуальной опорной станции или в широковещательном режиме. Режим виртуальной опорной станции совместим с режимом, показанным на фиг.31, поскольку данные опорной станции объединяются сетевым сервером RTK 3220 для создания набора данных, моделирующего опорную станцию (например, моделирующего единичные данные 3110 опорной станции от опорного приемника 3105) для заявленного положения, например, положения приемника 3115 ровера. В широковещательном режиме данные опорной станции поступают от опорных приемников 3205, 3210, 3215 для обработки в процессор 3130 ровера. В каждом режиме поправки 3225, в необязательном порядке, включают в себя модели ошибок, например, ионосферную и тропосферную модели, вычисленные из данных опорной станции.
На фиг.33 показан режим работы согласно вариантам осуществления настоящего изобретения, в котором используется совокупность отдельных опорных станций. Опорные приемники 3305, 3315, 3325 выдают соответствующие данные 3310, 3320, 3330 опорной станции на приемник 3300 ровера. Данные обеспечиваются, например, через подходящую линию передачи данных. Приемник 3300 ровера включает в себя подходящие элементы для приема данных опорной станции, например, антенну 3335 линии передачи данных и электронику 3340 для приема и демодуляции сигнала линии передачи данных, и для подачи данных опорной станции на процессор 3345 ровера. Если данные опорной станции сжимаются для эффективной передачи по линии передачи данных, то элемент 3350 снятия сжатия данных в приемнике 3345 ровера снимает сжатие данных опорной станции для использования одним или несколькими дополнительными элементами обработки в процессоре 3345.
Приемник 3300 ровера дополнительно включает в себя антенну 3370 для приема сигналов GNSS, имеющих три или более несущих частот, и подходящую электронику для приема и демодуляции сигнала 3375 для создания данных 3380 фазы несущей и псевдодальности приемника ровера 3+ для использования в процессоре 3345 ровера. Процессор 3345 ровера включает в себя соответствующий элемент 3355, 3360, 3365 синхронизации фазы несущей и псевдодальности для множественных диапазонов и опорной информации для каждой из опорных станций. Элементы 3355, 3360, 3365 синхронизируют данные 3380 приемника ровера с данными опорной станции для использования в элементе 3390 вычисления позиции методом RTK на множественных диапазонах. Вычислительный элемент 3390 вычисляет оценки позиции RTK приемника 3300 ровера и выдает в качестве выходных данных позицию RTK и информацию 3395 статуса.
Альтернативное определение постоянной времени
Способ определения постоянной времени комбинации фаз несущих был описан выше со ссылкой на уравнение (0.24).
Теперь опишем еще один способ вычисления постоянной времени комбинации фаз несущих согласно вариантам осуществления настоящего изобретения. Этот способ учитывает возможные разные значения дисперсии для наблюдений фазы несущей, а также временную корреляцию ионосферной ошибки, путем вычисления постоянной времени tcf для разделов «определение коэффициентов» следующим образом:
где tcio - постоянная времени ионосферной ошибки.
Для трех частот:
Для четырех частот:
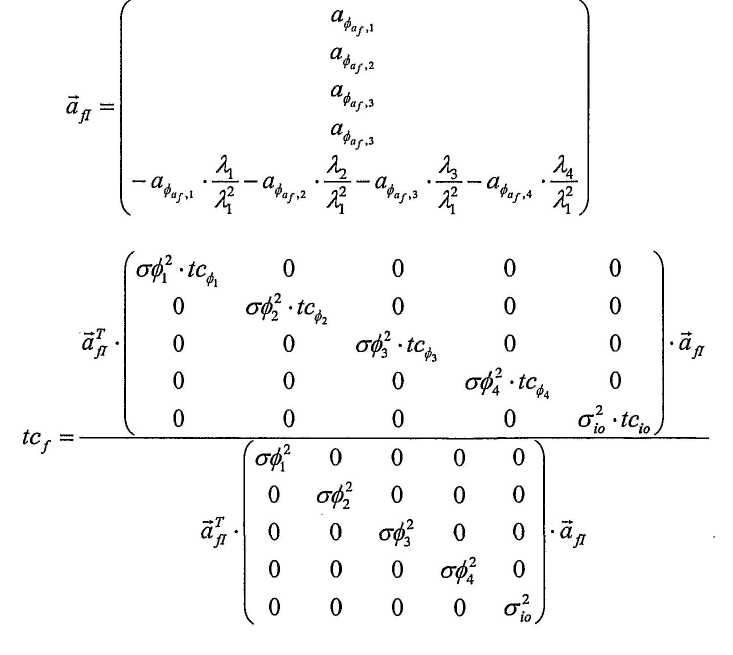
Коррекция фазовой комбинации для геометрического фильтра
Определение комбинации фаз несущих с наименьшей ошибкой, используемой в качестве наблюдаемой в вышеописанных вариантах осуществления геометрического фильтра, предусматривает, что характеристики ошибки определяют, что комбинация остается постоянной в течение всего времени работы фильтра. Это происходит не всегда. Например, для движущегося приемника с существенно изменяющимся расстоянием до опорной станции комбинация с наименьшей ошибкой будет изменяться с течением времени.
Оптимальную оценку можно построить, хотя геометрический фильтр работает с использованием почти оптимальной комбинации фаз несущих. Это также можно использовать для запуска геометрического фильтра только с фазой L1 (которая устойчивее, чем L2 в случае методов перекрестной корреляции P2). Для этого неоднозначности комбинации с наименьшей ошибкой создаются после фильтрации из результатов геометрического фильтра, ионосферного фильтра и фильтра(ов) квинтэссенции.
Способ вычисления фазовой комбинации с наименьшей ошибкой согласно вариантам осуществления настоящего изобретения позволяет изменять комбинацию, используемую во время действия фильтра, например, когда расстояние до опорной станции изменяется, кроме того, в геометрическом фильтре можно использовать сигнал с наилучшим качеством слежения/доступностью; это обеспечивает больше данных для фильтрации, чем доступно при обеспечении всех измерений фаз несущих на всех частотах.
Использование фазы несущей L1 в качестве фазовой комбинации в геометрическом фильтре вместо данной комбинации с наименьшей ошибкой обеспечивает оценки  для неоднозначностей фаз несущих L1. это означает подстановку комбинации
для неоднозначностей фаз несущих L1. это означает подстановку комбинации

для  в вышеприведенном описании. Результатом геометрического фильтра является оценка
в вышеприведенном описании. Результатом геометрического фильтра является оценка
При вычислении оценок неоднозначности  для данной комбинации фаз несущих с наименьшей ошибкой
для данной комбинации фаз несущих с наименьшей ошибкой  используются следующие формулы:
используются следующие формулы:

Определенная  используется в объединителе 850, как и прежде.
используется в объединителе 850, как и прежде.
Это также можно применять с использованием любой другой базовой частоты вместо L1, например, L2, L5, E5, E6 или любой другой несущей GNSS. Это благоприятно, если другой сигнал можно отслеживать лучше, например, сравнивая сигнал L2C гражданской частоты L2 GPS с сигналом C/A L1.
Для трех частот:
Для четырех частот:
На фиг.34 показана модифицированная версия фиг.8, где показаны элементы другого фильтра разрешения неоднозначности для 3+ несущих с полным разложением согласно вариантам осуществления настоящего изобретения. Вместо геометрического фильтра 830, показанного на фиг.8, используются геометрический фильтр 3430 фазы несущей одной частоты (например, L1, L2, L5, E5, E6 или любой другой несущей GNSS) и объединитель 3432. Объединитель 3432 получает в качестве входных сигналов результаты геометрического фильтра 3430, банка 835 ионосферных фильтров и банк(ов) фильтров квинтэссенции 840(1)...840(nf-2) и вычисляет оценки неоднозначности  , которые поступают на объединитель 850. Объединитель 850 действует согласно вышеописанным вариантам осуществления.
, которые поступают на объединитель 850. Объединитель 850 действует согласно вышеописанным вариантам осуществления.
На фиг.35 показана модифицированная версия фиг.18, которая схематически иллюстрирует еще один способ согласно вариантам осуществления настоящего изобретения для обработки набора данных сигнала GNSS с тремя или более несущими. Вместо применения геометрического фильтра к комбинации фаз несущих на этапе 1820, вариант осуществления, показанный на фиг.35, предусматривает применение геометрического фильтра фазы несущей одной частоты (например, L1, L2, L5, E5, E6 или любой другой несущей GNSS) на этапе 3570. В результате получается массив 3575 оценок неоднозначности для фазы одной несущей. На этапе 3580, оценки неоднозначности  1825 для геометрической комбинации фаз несущих вычисляются из массива 3575 и из результатов применения ионосферных фильтров, не зависящих от геометрии, на этапе 1830 и из результатов применения фильтров квинтэссенции, не зависящих от геометрии, на этапе 1840.
1825 для геометрической комбинации фаз несущих вычисляются из массива 3575 и из результатов применения ионосферных фильтров, не зависящих от геометрии, на этапе 1830 и из результатов применения фильтров квинтэссенции, не зависящих от геометрии, на этапе 1840.
Массивы 1825, 1835, 1845 и 1855 объединяются на этапе 1860, как раньше, для создания массива 1865 для всех наблюдений фазы несущей и соответствующей статистической информации.
На фиг.36 показана модифицированная версия фиг.19, показывающая применение способа, показанного на фиг.35, для получения расчетной позиции приемника GNSS с 3+ несущими частотами. Согласно варианту осуществления, показанному на фиг.36, на этапе 3570 применяется геометрический фильтр фазы несущей одной частоты (например, L1, L2, L5, E5, E6 или любой другой несущей GNSS). В результате получается массив 3575 оценок неоднозначности для фазы одной несущей. На этапе 3580, оценки неоднозначности  1825 для геометрической комбинации фаз несущих вычисляются из массива 3575 и из результатов применения ионосферных фильтров, не зависящих от геометрии, на этапе 1830 и из результатов применения фильтров квинтэссенции, не зависящих от геометрии на этапе 1840. Массивы 1825, 1835, 1845 и 1855 объединяются на этапе 1860, как раньше, для создания массива 1865 для всех наблюдений фазы несущей и соответствующей статистической информации. Массив 1865 передается процессу 1910, который вычисляет позицию приемника 1900 в виде решения в числах с плавающей точкой, в соответствии с временем получения набора данных 1805, и обеспечивает расчетную позицию 1920 в качестве выходного сигнала.
1825 для геометрической комбинации фаз несущих вычисляются из массива 3575 и из результатов применения ионосферных фильтров, не зависящих от геометрии, на этапе 1830 и из результатов применения фильтров квинтэссенции, не зависящих от геометрии на этапе 1840. Массивы 1825, 1835, 1845 и 1855 объединяются на этапе 1860, как раньше, для создания массива 1865 для всех наблюдений фазы несущей и соответствующей статистической информации. Массив 1865 передается процессу 1910, который вычисляет позицию приемника 1900 в виде решения в числах с плавающей точкой, в соответствии с временем получения набора данных 1805, и обеспечивает расчетную позицию 1920 в качестве выходного сигнала.
На фиг.37 показана модифицированная версия фиг.20, показывающая применение способа, показанного на фиг.35, для получения расчетной позиции приемника GNSS с 3+ несущими частотами. Согласно варианту осуществления, показанному на фиг.37, на этапе 3570 применяется геометрический фильтр фазы несущей одной частоты (например, L1, L2, L5, E5, E6 или любой другой несущей GNSS). В результате получается массив 3575 оценок неоднозначности для фазы одной несущей. На этапе 3580 оценки неоднозначности  1825 для геометрической комбинации фаз несущих вычисляются из массива 3575 и из результатов применения ионосферных фильтров, не зависящих от геометрии на этапе 1830 и из результатов применения фильтров квинтэссенции, не зависящих от геометрии, на этапе 1840. Массивы 1825, 1835, 1845 и 1855 объединяются на этапе 1860, как раньше, для создания массива 1865 для всех наблюдений фазы несущей и соответствующей статистической информации. Массив 1865 передается процессу 2010, который определяет целочисленные неоднозначности методом целочисленных наименьших квадратов. Процесс 2015 проверки проверяет правильность решения, которое используется в процессе 2020 для вычисления позиции 2025 приемника 2000.
1825 для геометрической комбинации фаз несущих вычисляются из массива 3575 и из результатов применения ионосферных фильтров, не зависящих от геометрии на этапе 1830 и из результатов применения фильтров квинтэссенции, не зависящих от геометрии, на этапе 1840. Массивы 1825, 1835, 1845 и 1855 объединяются на этапе 1860, как раньше, для создания массива 1865 для всех наблюдений фазы несущей и соответствующей статистической информации. Массив 1865 передается процессу 2010, который определяет целочисленные неоднозначности методом целочисленных наименьших квадратов. Процесс 2015 проверки проверяет правильность решения, которое используется в процессе 2020 для вычисления позиции 2025 приемника 2000.
На фиг.38 показано еще одно применение способа, показанного на фиг.35, для получения расчетной позиции приемника GNSS с 3+ несущими частотами. Согласно варианту осуществления, показанному на фиг.38, на этапе 3570 применяется геометрический фильтр фазы несущей одной частоты (например, L1, L2, L5, E5, E6 или любой другой несущей GNSS). В результате получается массив 3575 оценок неоднозначности для фазы одной несущей. На этапе 3580 оценки неоднозначности  1825 для геометрической комбинации фаз несущих вычисляются из массива 3575 и из результатов применения ионосферных фильтров, не зависящих от геометрии на этапе 1830 и из результатов применения фильтров квинтэссенции, не зависящих от геометрии на этапе 1840. Массивы 1825, 1835, 1845 и 1855 объединяются на этапе 1860, как раньше, для создания массива 1865 для всех наблюдений фазы несущей и соответствующей статистической информации. Массив 1865 передается процессу 2010, который определяет целочисленные неоднозначности методом целочисленных наименьших квадратов. Процесс 2015 проверки проверяет правильность решения. Процесс 2020 вычисляет позицию из проверенного решения. Расчетная позиция 2025, выданная в качестве выходного сигнала, является проверенным решением в виде комбинации решений с плавающей точкой и фиксированной точкой.
1825 для геометрической комбинации фаз несущих вычисляются из массива 3575 и из результатов применения ионосферных фильтров, не зависящих от геометрии на этапе 1830 и из результатов применения фильтров квинтэссенции, не зависящих от геометрии на этапе 1840. Массивы 1825, 1835, 1845 и 1855 объединяются на этапе 1860, как раньше, для создания массива 1865 для всех наблюдений фазы несущей и соответствующей статистической информации. Массив 1865 передается процессу 2010, который определяет целочисленные неоднозначности методом целочисленных наименьших квадратов. Процесс 2015 проверки проверяет правильность решения. Процесс 2020 вычисляет позицию из проверенного решения. Расчетная позиция 2025, выданная в качестве выходного сигнала, является проверенным решением в виде комбинации решений с плавающей точкой и фиксированной точкой.
Специалистам в данной области должно быть очевидно, что подробное описание вариантов осуществления настоящего изобретения является всего лишь иллюстративным, не предусматривает никаких ограничений. Специалисты в данной области могут предложить другие варианты осуществления настоящего изобретения на основании этого раскрытия. Например, хотя в примерах используется комбинация с наименьшей ошибкой, специалистам в данной области должно быть очевидно, что возможны многие комбинации, и что комбинация, отличная от комбинации с наименьшей ошибкой, может обеспечивать приемлемые, если не оптимальные, результаты; таким образом, формула изобретения не предусматривает ограничения комбинациями с наименьшей ошибкой, кроме случаев явного указания на них. В подробном описании приведены ссылки на реализации настоящего изобретения, проиллюстрированные в прилагаемых чертежах. Для обозначения одинаковых или сходных элементов на протяжении чертежей и следующего за ними подробного описания используются одинаковые позиции.
Для ясности, не все общеизвестные особенности описанных здесь реализаций показаны и описаны. Очевидно, что при разработке любой такой фактической реализации нужно принимать многочисленные решения, зависящие от реализации, для достижения конкретных целей разработчика, например, согласование с ограничениями, связанными с приложениями и бизнесом, и что эти конкретные цели будут различными для разных реализаций и разных разработчиков. Кроме того, очевидно, что такие труды по разработке могут быть сложными и требующими времени, но, тем не менее, являются рутинным инженерным занятием для специалистов в данной области, опирающихся на это раскрытие.
Согласно вариантам осуществления настоящего изобретения, компоненты, этапы процесса и/или структуры данных могут быть реализованы с использованием различных типов операционных систем (ОС), компьютерных платформ, программно-аппаратного обеспечения, компьютерных программ, компьютерных языков и/или машин общего назначения. Способы могут выполняться как запрограммированный процесс, выполняющийся на обрабатывающем устройстве. Обрабатывающее устройство может принимать форму многочисленных комбинаций процессоров и операционных систем или автономного устройства. Процессы могут быть реализованы в виде команд, выполняемых таким оборудованием, самого оборудования или любой их комбинации. Программное обеспечение может храниться в устройстве хранения программ, считываемом машиной. Вычислительные элементы, например, фильтры и банки фильтров, можно легко реализовать с использованием объектно-ориентированного языка программирования, что позволяет реализовать отдельно каждый необходимый фильтр.
Специалистам в данной области должно быть очевидно, что устройства, имеющие не столь общее применение, например, устройства с фиксированным программным обеспечением, логические устройства, программируемые пользователем (FPLD), в том числе вентильные матрицы, программируемые пользователем (FPGA) и сложные программируемые логические устройства (CPLD), специализированные интегральные схемы (ASIC) и т.п., также можно использовать, не выходя за рамки объема и сущности раскрытых здесь идей изобретения.
Согласно варианту осуществления настоящего изобретения, способы могут быть реализованы на компьютере обработки данных, например, персональном компьютере, компьютере рабочей станции, универсальном компьютере или высокопроизводительном сервере, на котором действует ОС, например, Microsoft® Windows® XP и Windows® 2000 от Microsoft Corporation, Редмонд, Вашингтон, или Solaris® от Sun Microsystems, Inc., Санта-Клара, Калифорния, или различные версии операционной системы Unix, например, Linux, от различных производителей. Способы также можно реализовать на многопроцессорной системе или в вычислительной среде, включающей в себя различные периферические устройства, например, устройства ввода, устройства вывода, указательные устройства, память, устройства хранения, мультимедийные интерфейсы для переноса данных на и от процессора(ов) и т.д. Доступ к такой компьютерной системе или вычислительной среде можно осуществлять по локальной сети или через Интернет.
Способы и устройства согласно вариантам осуществления настоящего изобретения включают в себя, но без ограничения:
1. Способ обработки набора данных сигнала GNSS, выведенного из сигналов, имеющих, по меньшей мере, три несущие, содержащий этапы, на которых:
a. применяют к набору данных сигнала GNSS геометрический фильтр с использованием геометрической комбинации фаз несущих для получения массива оценок неоднозначности для геометрической комбинации фаз несущих и соответствующей статистической информации;
b. применяют к набору данных сигнала GNSS банк ионосферных фильтров с использованием ионосферной не зависящей от геометрии комбинации фаз несущих для получения массива оценок неоднозначности для ионосферной комбинации фаз несущих и соответствующей статистической информации;
c. применяют к набору данных сигнала GNSS, по меньшей мере, один банк фильтров квинтэссенции с использованием не зависящей от геометрии и не зависящей от ионосферы комбинации фаз несущих для получения массива оценок неоднозначности для комбинации фаз несущих, не зависящей от геометрии и не зависящей от ионосферы, и соответствующей статистической информации;
d. применяют к набору данных сигнала GNSS, по меньшей мере, один кодовый фильтр с использованием совокупности комбинаций кодов несущих, не зависящих от геометрии, для получения массива оценок неоднозначности для комбинаций кодов несущих и соответствующей статистической информации; и
e. объединяют массивы a., b., c. и d. для получения объединенного массива оценок неоднозначности для всех наблюдений фазы несущей и соответствующей статистической информации.
2. Способ по п.1, дополнительно содержащий этап, на котором вычисляют позицию пользователя из объединенного массива.
3. Способ по п.п.1 или 2, в котором набор данных сигнала GNSS содержит данные сигнала GNSS для одной эпохи.
4. Способ по любому из п.п.1-3, дополнительно содержащий этап, на котором вычисляют позицию пользователя из объединенного массива с помощью комбинации неоднозначностей с плавающей точкой и неоднозначностей с фиксированной точкой путем применения процедуры целочисленных наименьших квадратов и процедуры проверки.
5. Способ по любому из п.п.1-3, дополнительно содержащий этап, на котором вычисляют позицию пользователя из объединенного массива с помощью неоднозначностей с плавающей точкой и вычисляют позицию пользователя из объединенного массива с помощью комбинации неоднозначностей с плавающей точкой и неоднозначностей с фиксированной точкой путем применения процедуры целочисленных наименьших квадратов и процедуры проверки.
6. Способ по любому из п.п.1-5, в котором, при применении к набору данных сигнала GNSS, по меньшей мере, одного кодового фильтра, применяют к набору данных сигнала GNSS, по меньшей мере, один кодовый фильтр с использованием совокупности комбинаций кодов несущих, не зависящих от геометрии, и не зависящие от ионосферы для получения массива оценок неоднозначности для комбинаций кодов несущих и соответствующей статистической информации.
7. Способ по любому из п.п.1-5, в котором при применении к набору данных сигнала GNSS, по меньшей мере, одного кодового фильтра применяют к набору данных сигнала GNSS один кодовый фильтр для каждой несущей с использованием совокупности комбинаций кодов несущих, не зависящих от геометрии и не зависящих от ионосферы, для получения массива оценок неоднозначности для комбинаций кодов несущих и соответствующей статистической информации.
8. Способ по п.7, в котором кодовые фильтры взаимно ортогональны.
9. Способ по любому из п.п.1-8, в котором набор данных сигнала GNSS выводят из сигналов, принятых от передатчиков первой навигационной системы, способ дополнительно содержит обработку второго набора данных сигнала GNSS, выведенного из сигналов, имеющих, по меньшей мере, две несущих, и принятых от передатчиков второй навигационной системы посредством этапов, на которых
f. применяют ко второму набору данных сигнала GNSS геометрический фильтр с использованием геометрической комбинации фаз несущих для получения массива оценок неоднозначности для геометрической комбинации фаз несущих и соответствующей статистической информации;
g. применяют ко второму набору данных сигнала GNSS банк ионосферных фильтров с использованием ионосферной не зависящей от геометрии комбинации фаз несущих для получения массива оценок неоднозначности для ионосферной комбинации фаз несущих и соответствующей статистической информации;
h. применяют ко второму набору данных сигнала GNSS, по меньшей мере, один банк фильтров квинтэссенции с использованием комбинации фаз несущих, не зависящей от геометрии, для получения массива оценок неоднозначности для комбинации фаз несущих и соответствующей статистической информации;
i. применяют ко второму набору данных сигнала GNSS, по меньшей мере, один кодовый фильтр с использованием совокупности комбинаций кодов несущих, не зависящих от геометрии и не зависящих от ионосферы, для получения массива оценок неоднозначности для комбинаций кодов несущих и соответствующей статистической информации; и
в котором на этапе d. дополнительно объединяют массивы, полученные на этапах f., g., h. и i., с массивами, полученными на этапах a., b., c. и d., для получения объединенного массива оценок неоднозначности для всех наблюдений фазы несущей и соответствующей статистической информации.
10. Способ по п.9, в котором на этапах a. и f. применяют первый набор данных сигнала GNSS и второй набор данных сигнала GNSS к одному геометрическому фильтру для получения единого массива оценок неоднозначности для геометрической комбинации фаз несущих и соответствующей статистической информации.
11. Способ по п.9 или 10, в котором первая навигационная система имеет первое количество несущих частот и наблюдаемых, и вторая навигационная система имеет второе количество несущих частот и наблюдаемых, которое отличается от первого количества несущих частот и наблюдаемых.
12. Способ по любому из п.п.9-11, в котором при применении ко второму набору данных сигнала GNSS, по меньшей мере, одного кодового фильтра применяют ко второму набору данных сигнала GNSS, по меньшей мере, один кодовый фильтр с использованием совокупности комбинаций кодов несущих, не зависящих от геометрии и не зависящих от ионосферы, для получения массива оценок неоднозначности для комбинаций кодов несущих и соответствующей статистической информации.
13. Способ по любому из п.п.9-11, в котором при применении к набору данных сигнала GNSS, по меньшей мере, одного кодового фильтра применяют к набору данных сигнала GNSS один кодовый фильтр для каждой несущей с использованием совокупности комбинаций кодов несущих, не зависящих от геометрии и не зависящих от ионосферы, для получения массива оценок неоднозначности для комбинаций кодов несущих и соответствующей статистической информации.
14. Способ по п.13, в котором кодовые фильтры, применяемые на этапе h., взаимно ортогональны.
15. Способ по любому из п.п.1-14, в котором данные сигнала GNSS содержат данные, собранные на совокупности опорных приемников.
16. Способ по любому из п.п.1-15, в котором данные сигнала GNSS содержат данные, собранные на совокупности перемещающихся приемников.
17. Способ по любому из п.п.1-16, в котором данные сигнала GNSS содержат данные, генерируемые из сети опорных станций.
18. Способ по п.17, в котором данные, генерируемые из сети опорных станций, содержат, по меньшей мере, одну модель ошибки.
19. Способ по любому из п.п.1-18, в котором на этапе а. (i.) применяют к набору данных сигнала GNSS геометрический фильтр с использованием фазы одной несущей частоты для получения массива оценок неоднозначности для фазы одной несущей частоты, и (ii.) вычисляют массив оценок неоднозначности для геометрической комбинации фаз несущих из массива оценок неоднозначности для фазы одной несущей частоты и массива оценок неоднозначности для ионосферной комбинации фаз несущих и массива оценок неоднозначности для геометрической и не зависящей от ионосферы комбинации фаз несущих.
20. Способ по любому из п.п.1-19, в котором геометрическая комбинация фаз несущих является комбинацией с наименьшей ошибкой.
21. Способ по п.19, в котором фазу одной несущей частоты выбирают из одной из следующих частот: GPS L1, GPS L2, GPS L5, Galileo E5, Galileo E6.
22. Способ по любому из п.п.1-21, дополнительно содержащий этап, на котором определяют постоянную времени комбинации фаз несущих.
23. Способ по п.22, в котором при определении постоянной времени учитывают значения дисперсии наблюдаемых фазы несущей.
24. Способ по п.22 или 23, в котором, при определении постоянной времени, учитывают временную корреляцию ионосферной ошибки.
25. Устройство для выполнения способа по любому из п.п.1-24.
26. Устройство для обработки набора данных сигнала GNSS, выведенного из сигналов, имеющих, по меньшей мере, три несущих, содержащее:
a. геометрический фильтр, использующий геометрическую комбинацию фаз несущих для получения из набора данных сигнала GNSS массива оценок неоднозначности для геометрической комбинации фаз несущих и соответствующей статистической информации;
b. банк ионосферных фильтров, использующих ионосферную не зависящую от геометрии комбинацию фаз несущих для получения из набора данных сигнала GNSS массива оценок неоднозначности для ионосферной комбинации фаз несущих и соответствующей статистической информации;
c. по меньшей мере, один банк фильтров квинтэссенции, использующих не зависящую от геометрии и не зависящую от ионосферы комбинацию фаз несущих для получения из набора данных сигнала GNSS массива оценок неоднозначности для комбинации фаз несущих, не зависящей от геометрии и не зависящей от ионосферы, и соответствующей статистической информации;
d. по меньшей мере, один кодовый фильтр, использующий совокупность комбинаций кодов несущих, не зависящих от геометрии, для получения из набора данных GNSS массива оценок неоднозначности для комбинаций кодов несущих и соответствующей статистической информации; и
e. объединитель для создания из массивов, полученных с помощью фильтров a., b., c. и d., объединенного массива оценок неоднозначности для всех наблюдений фазы несущей и соответствующей статистической информации.
27. Устройство по п.26, дополнительно содержащее элемент расчета позиции для вычисления позиции пользователя из объединенного массива.
28. Устройство по п.26 или 27, в котором набор данных сигнала GNSS содержит данные сигнала GNSS для одной эпохи.
29. Устройство по любому из п.п.26-28, дополнительно содержащее элемент расчета позиции для вычисления позиции пользователя из объединенного массива с помощью комбинации неоднозначностей с плавающей точкой и неоднозначностей с фиксированной точкой путем применения процедуры целочисленных наименьших квадратов и процедуры проверки.
30. Устройство по любому из п.п.26-28, дополнительно содержащее элемент расчета позиции для вычисления позиции пользователя из объединенного массива с помощью неоднозначностей с плавающей точкой и вычисления позиции пользователя из объединенного массива с помощью комбинации неоднозначностей с плавающей точкой и неоднозначностей с фиксированной точкой путем применения процедуры целочисленных наименьших квадратов и процедуры проверки.
31. Устройство по любому из п.п.26-30, в котором, по меньшей мере, один кодовый фильтр использует совокупность комбинаций кодов несущих, не зависящих от геометрии и не зависящих от ионосферы, для получения массива оценок неоднозначности для комбинаций кодов несущих и соответствующей статистической информации.
32. Устройство по любому из п.п.26-30, в котором, по меньшей мере, один кодовый фильтр использует совокупность комбинаций кодов несущих, не зависящих от геометрии и не зависящих от ионосферы, для получения массива оценок неоднозначности для комбинаций кодов несущих и соответствующей статистической информации.
33. Устройство по п.32, в котором кодовые фильтры взаимно ортогональны.
34. Устройство по любому из п.п.26-33, в котором набор данных сигнала GNSS выводится из сигналов, принятых от передатчиков первой навигационной системы, устройство дополнительно содержит следующие элементы для обработки второго набора данных сигнала GNSS, выведенного из сигналов, имеющих, по меньшей мере, две несущие, и принятых от передатчиков второй навигационной системы:
e. геометрический фильтр, использующий геометрическую комбинацию фаз несущих для получения из второго набора данных сигнала GNSS массива оценок неоднозначности для геометрической комбинации фаз несущих и соответствующей статистической информации;
f. банк ионосферных фильтров, использующих ионосферную не зависящую от геометрии комбинацию фаз несущих для получения из второго набора данных сигнала GNSS массива оценок неоднозначности для ионосферной комбинации фаз несущих и соответствующей статистической информации;
g. по меньшей мере, один банк фильтров квинтэссенции, использующих комбинацию фаз несущих, не зависящую от геометрии, для получения из второго набора данных сигнала GNSS массива оценок неоднозначности для комбинации фаз несущих и соответствующей статистической информации;
h. по меньшей мере, один кодовый фильтр, использующий совокупность комбинаций кодов несущих, не зависящих от геометрии и не зависящих от ионосферы, для получения из второго набора данных сигнала GNSS массива оценок неоднозначности для комбинаций кодов несущих и соответствующей статистической информации; и
в котором объединитель создает из массивов, полученных с помощью фильтров e., f., g. и h., и массивов, полученных с помощью фильтров a., b., и c., объединенный массив оценок неоднозначности для всех наблюдений фазы несущей и соответствующей статистической информации.
35. Устройство по любому из п.п.26-33, в котором набор данных сигнала GNSS выводится из сигналов, принятых от передатчиков первой навигационной системы, устройство дополнительно содержит следующие элементы для обработки второго набора данных сигнала GNSS, выведенного из сигналов, имеющих, по меньшей мере, две несущие, и принятых от передатчиков второй навигационной системы:
f. банк ионосферных фильтров использующих ионосферную не зависящую от геометрии комбинацию фаз несущих для получения из второго набора данных сигнала GNSS массива оценок неоднозначности для ионосферной комбинации фаз несущих и соответствующей статистической информации;
g. по меньшей мере, один банк фильтров квинтэссенции, использующих комбинацию фаз несущих, не зависящую от геометрии, для получения из второго набора данных сигнала GNSS массива оценок неоднозначности для комбинации фаз несущих и соответствующей статистической информации;
h. по меньшей мере, один кодовый фильтр, использующий совокупность комбинаций кодов несущих, не зависящую от геометрии и не зависящую от ионосферы, для получения из второго набора данных сигнала GNSS массива оценок неоднозначности для комбинаций кодов несущих и соответствующей статистической информации; и
в котором геометрический фильтр использует геометрическую комбинацию фаз несущих для получения из первого набора данных сигнала GNSS и из второго набора данных сигнала GNSS массива оценок неоднозначности для геометрической комбинации фаз несущих и соответствующей статистической информации, и в котором объединитель создает из массивов, полученных с помощью фильтров f., g. и h., и массивов, полученных с помощью фильтров a., b., c. и d., объединенный массив оценок неоднозначности для всех наблюдений фазы несущей и соответствующей статистической информации.
36. Устройство по п.34 или 35, в котором первая навигационная система имеет первое количество несущих частот и наблюдаемых и вторая навигационная система имеет второе количество несущих частот и наблюдаемых, которое отличается от первого количества несущих частот и наблюдаемых.
37. Устройство по любому из п.п.34-36, в котором, по меньшей мере, один кодовый фильтр h. использует совокупность комбинаций кодов несущих, не зависящих от геометрии и не зависящих от ионосферы, для получения из второго набора данных сигнала GNSS массива оценок неоднозначности для комбинаций кодов несущих и соответствующей статистической информации.
38. Устройство по любому из п.п.34-37, в котором, по меньшей мере, один кодовый фильтр h. использует совокупность комбинаций кодов несущих, не зависящих от геометрии и не зависящих от ионосферы, для получения из второго набора данных сигнала GNSS массива оценок неоднозначности для комбинаций кодов несущих и соответствующей статистической информации.
39. Устройство по п.38, в котором кодовые фильтры, применяемые на этапе h., взаимно ортогональны.
40. Устройство по любому из п.п.26-39, в котором данные сигнала GNSS содержат данные, собранные на совокупности опорных приемников.
41. Устройство по любому из п.п.26-40, в котором данные сигнала GNSS содержат данные, собранные на совокупности перемещающихся приемников.
42. Устройство по любому из п.п.26-41, в котором данные сигнала GNSS содержат данные, генерируемые из сети опорных станций.
43. Устройство по п.42, в котором данные, генерируемые из сети опорных станций, содержат, по меньшей мере, одну модель ошибки.
44. Устройство по любому из п.п.26-43, в котором а. содержит (i.) геометрический фильтр, использующий фазу одной несущей частоты для получения массива оценок неоднозначности для фазы одной несущей частоты, и (ii.) объединитель для вычисления массива оценок неоднозначности для геометрической комбинации фаз несущих из массива оценок неоднозначности для фазы одной несущей частоты и массива оценок неоднозначности для ионосферной комбинации фаз несущих и массива оценок неоднозначности для геометрической и не зависящей от ионосферы комбинации фаз несущих.
45. Устройство по любому из п.п.26-44, в котором геометрическая комбинация фаз несущих является комбинацией с наименьшей ошибкой.
46. Устройство по п.44, в котором фаза одной несущей частоты выбирается из одной из следующих частот: GPS L1, GPS L2, GPS L5, Galileo E5, Galileo E6.
47. Устройство по любому из п.п.26-45, дополнительно содержащее определение постоянной времени комбинации фаз несущих.
48. Устройство по п.47, в котором при определении постоянной времени учитываются значения дисперсии наблюдаемых фазы несущей.
49. Устройство по п.47 или 48, в котором при определении постоянной времени учитывается временная корреляция ионосферной ошибки.
Хотя были проиллюстрированы и описаны варианты осуществления и применения настоящего изобретения, специалистам в данной области должно быть очевидно, что на основании данного раскрытия можно предложить гораздо больше модификаций, чем упомянуто выше, не выходя за рамки представленных здесь идей изобретения. Таким образом, изобретение не ограничивается ничем, кроме сущности прилагаемой формулы изобретения.
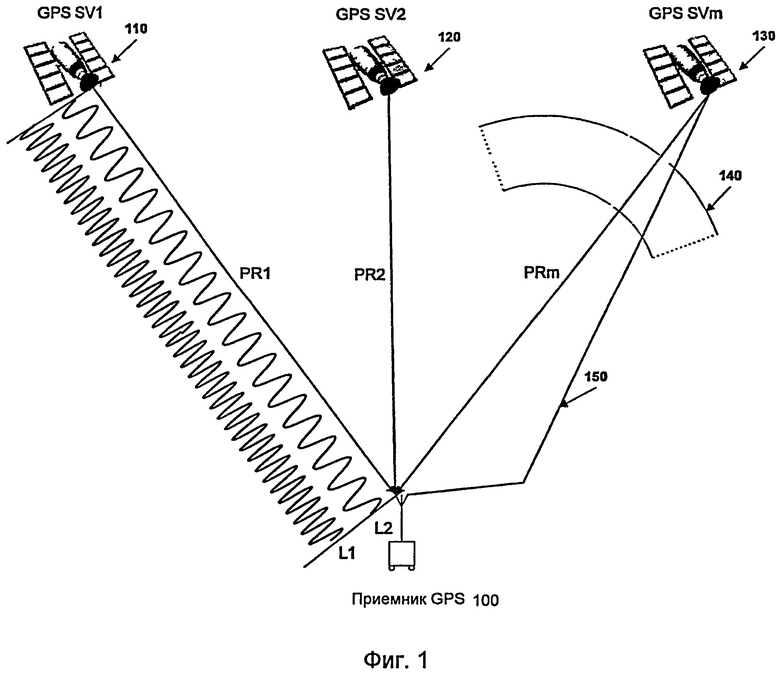
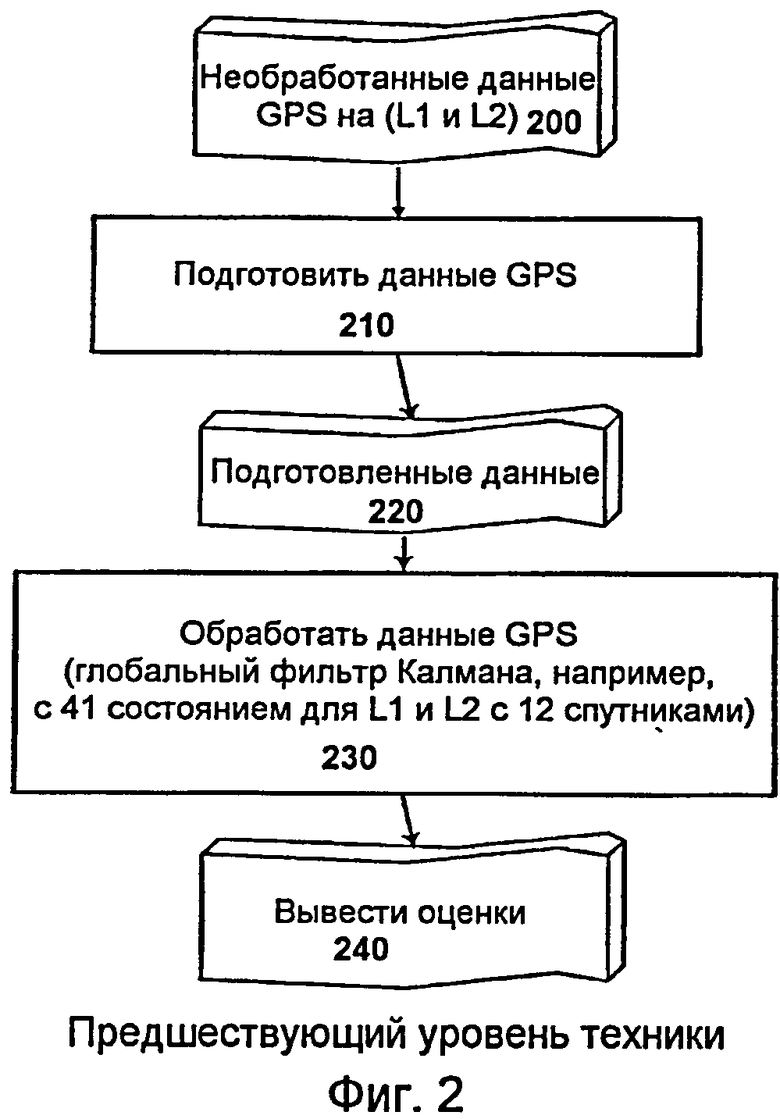
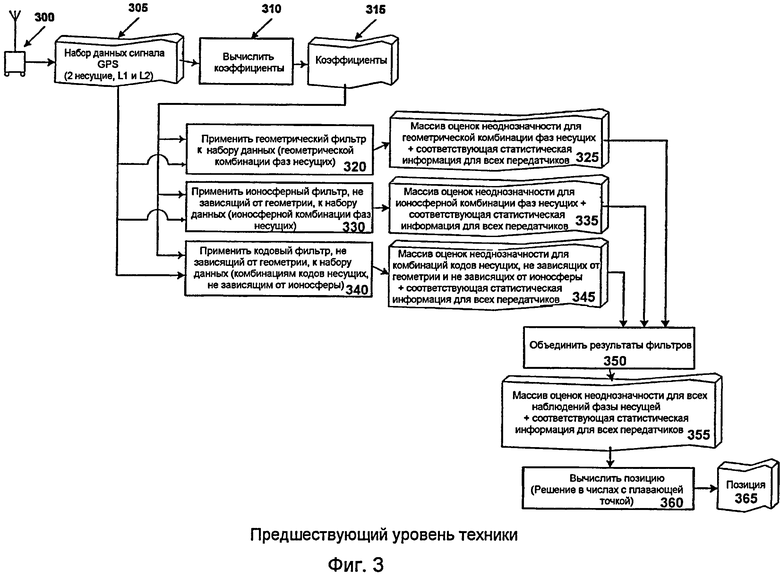
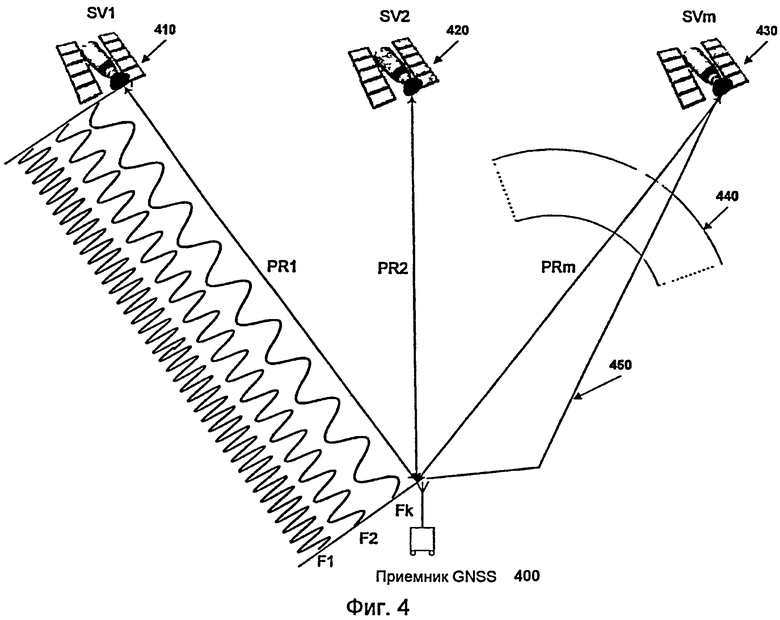
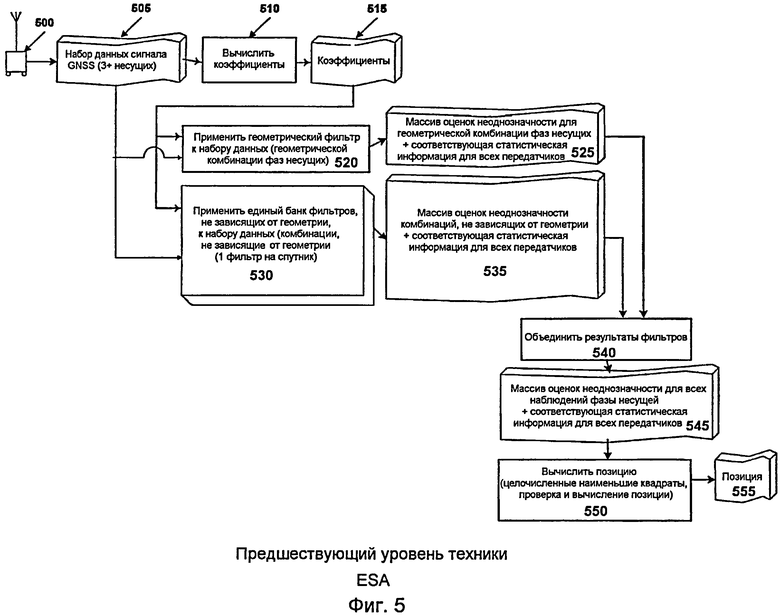
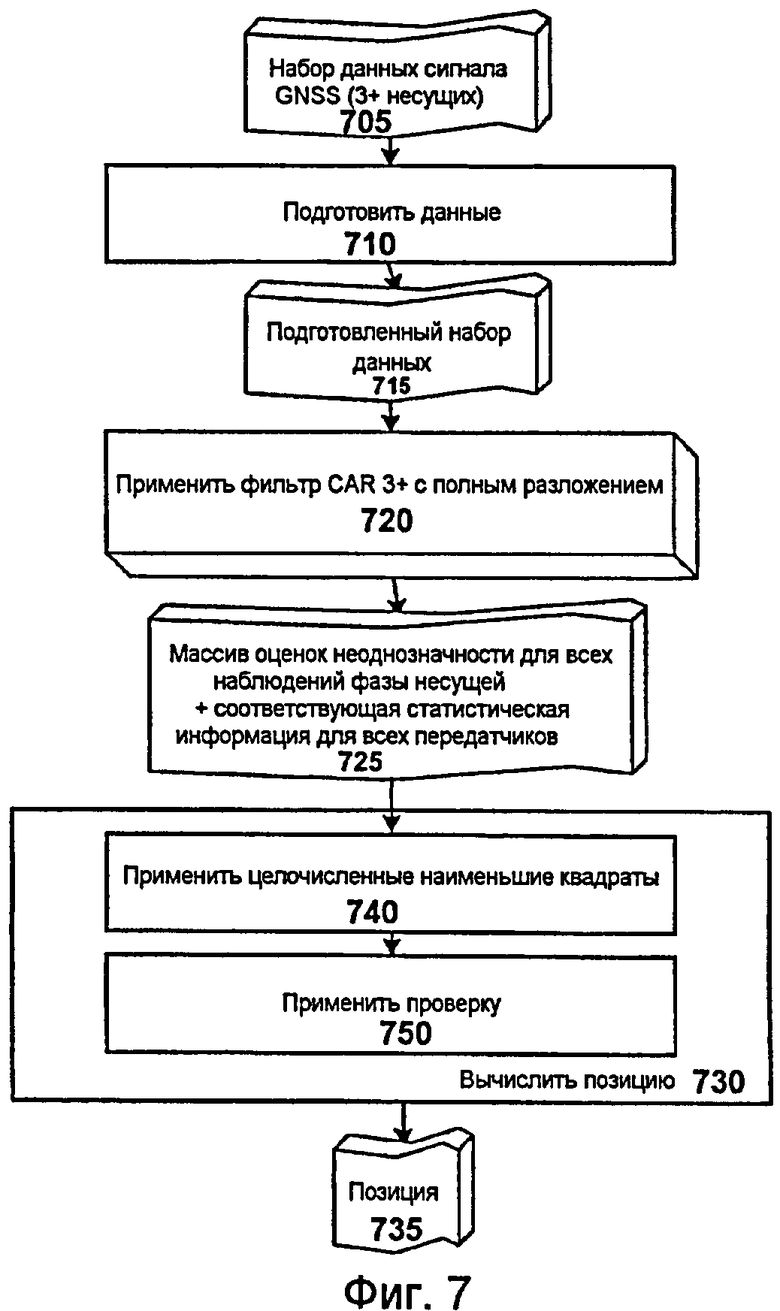
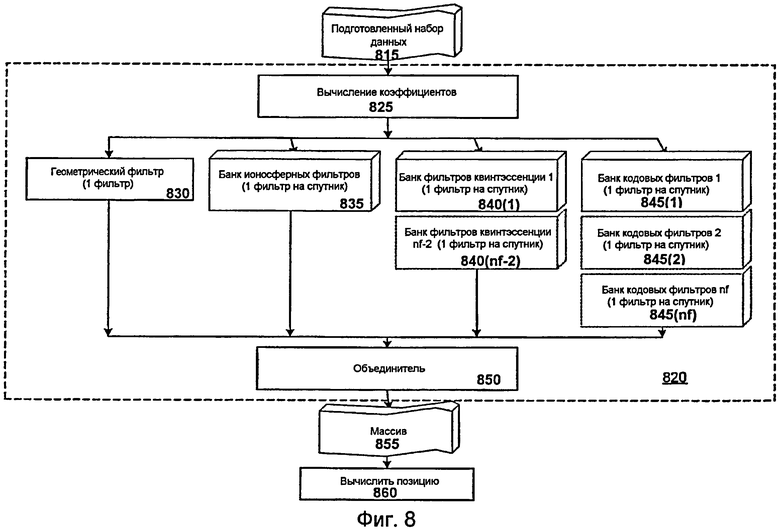
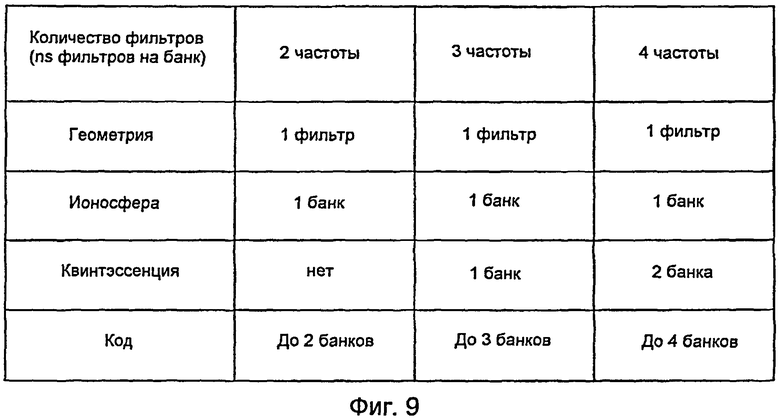
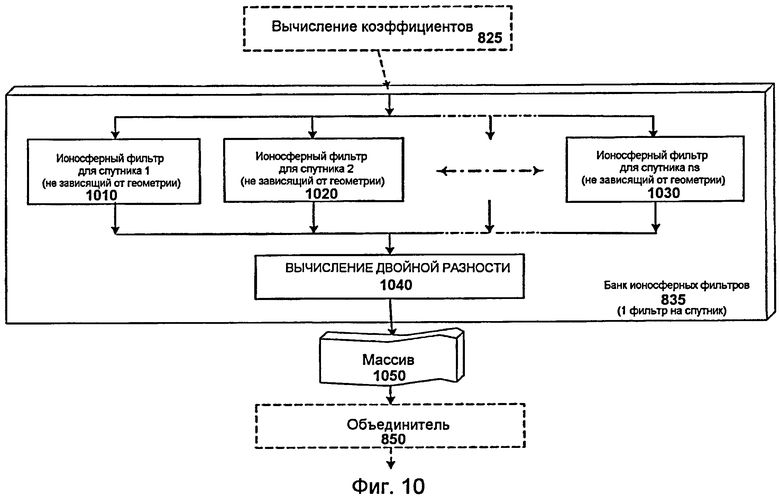
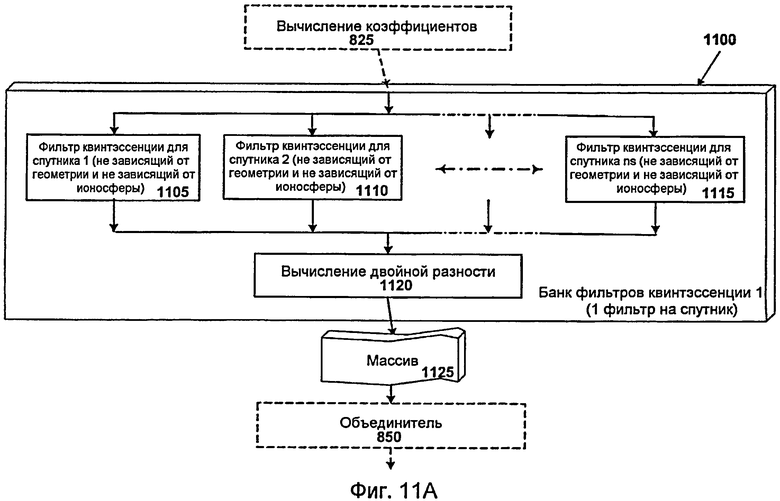
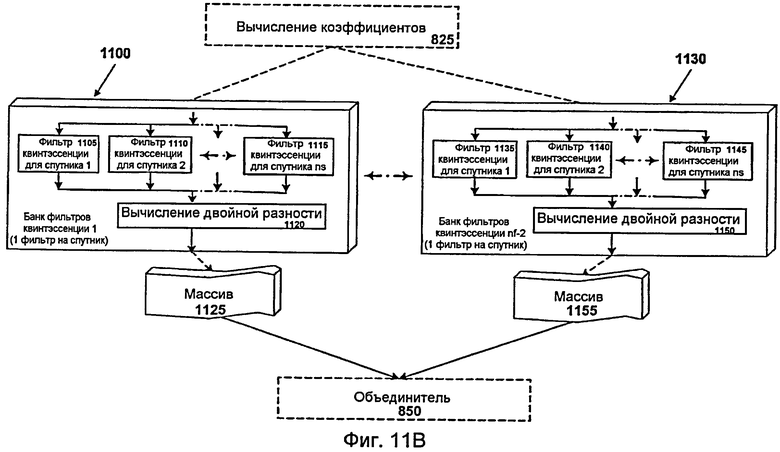
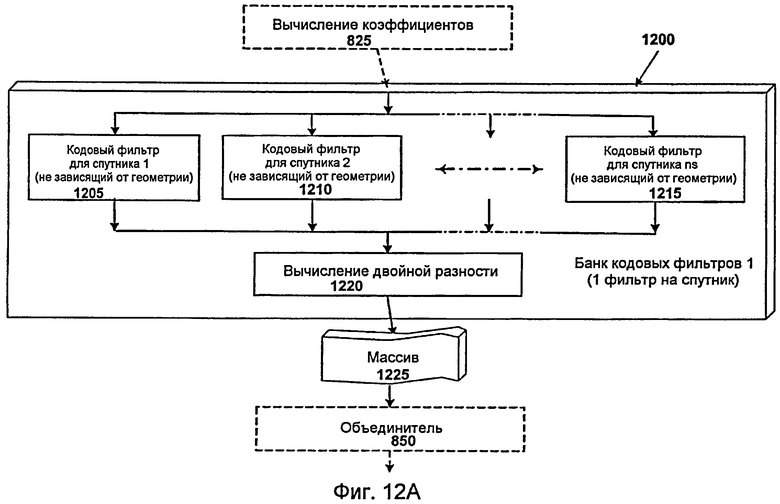
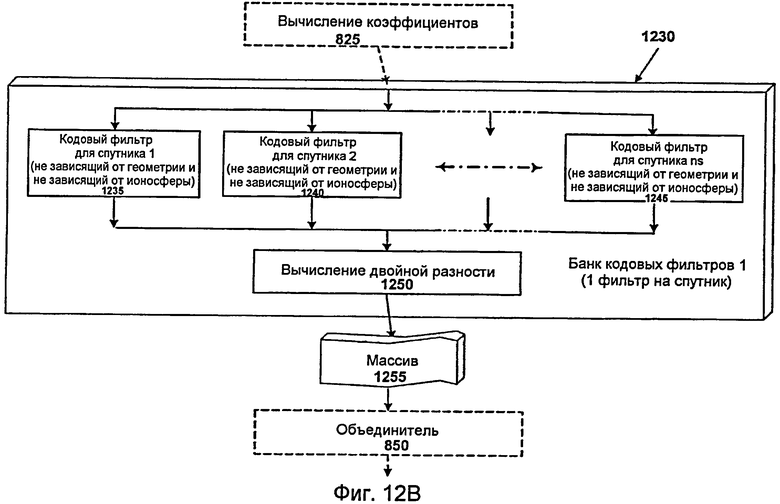
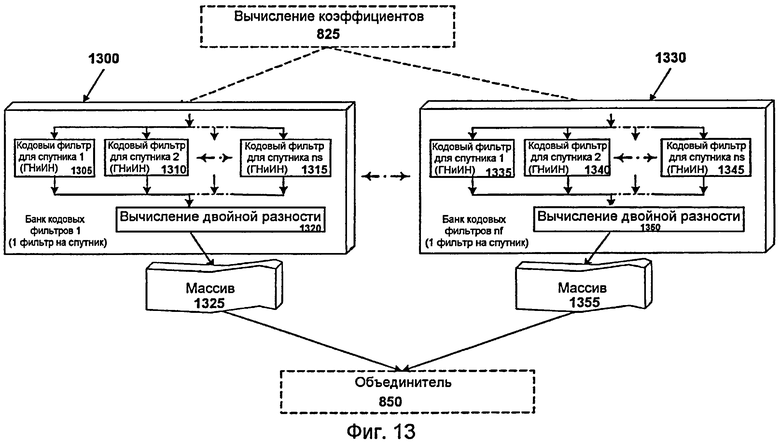
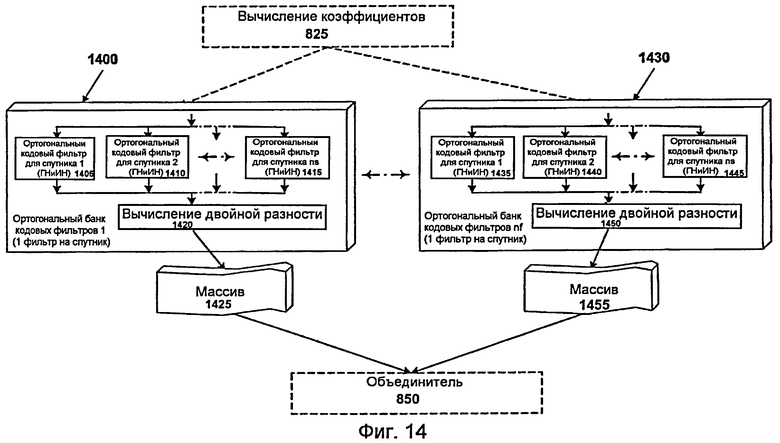
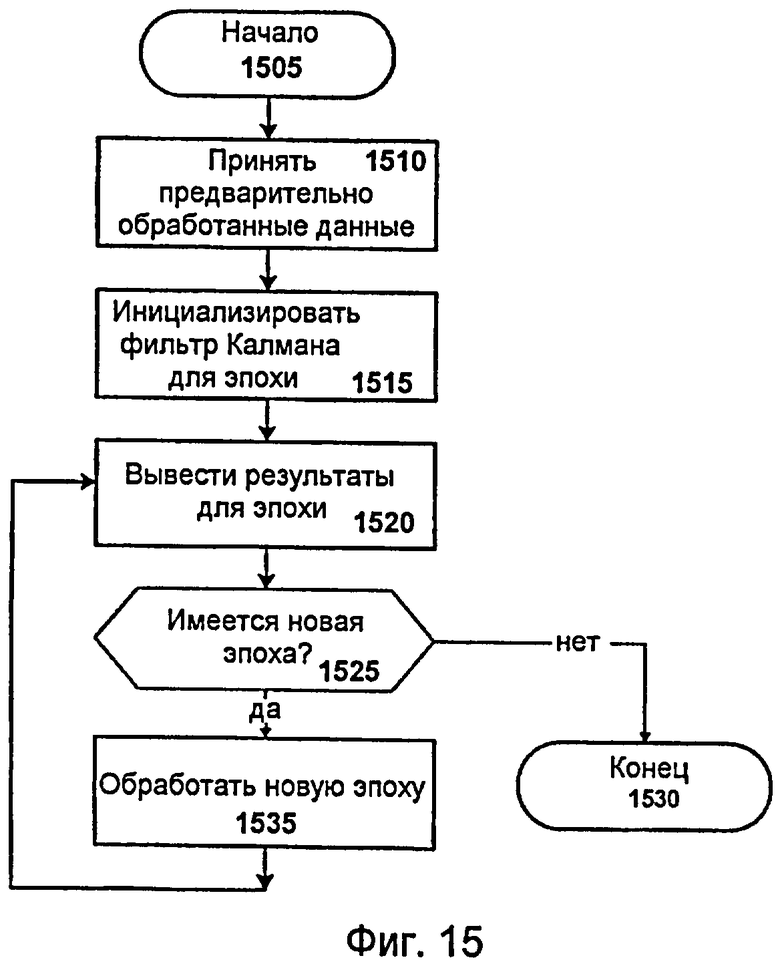
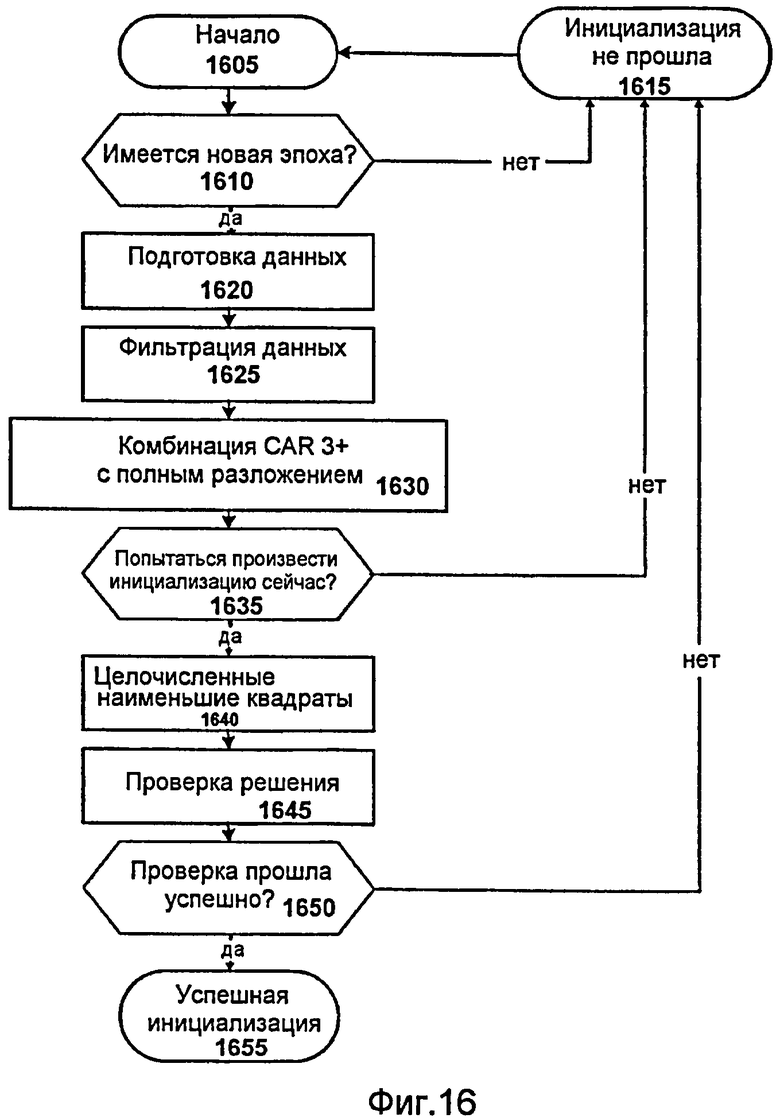
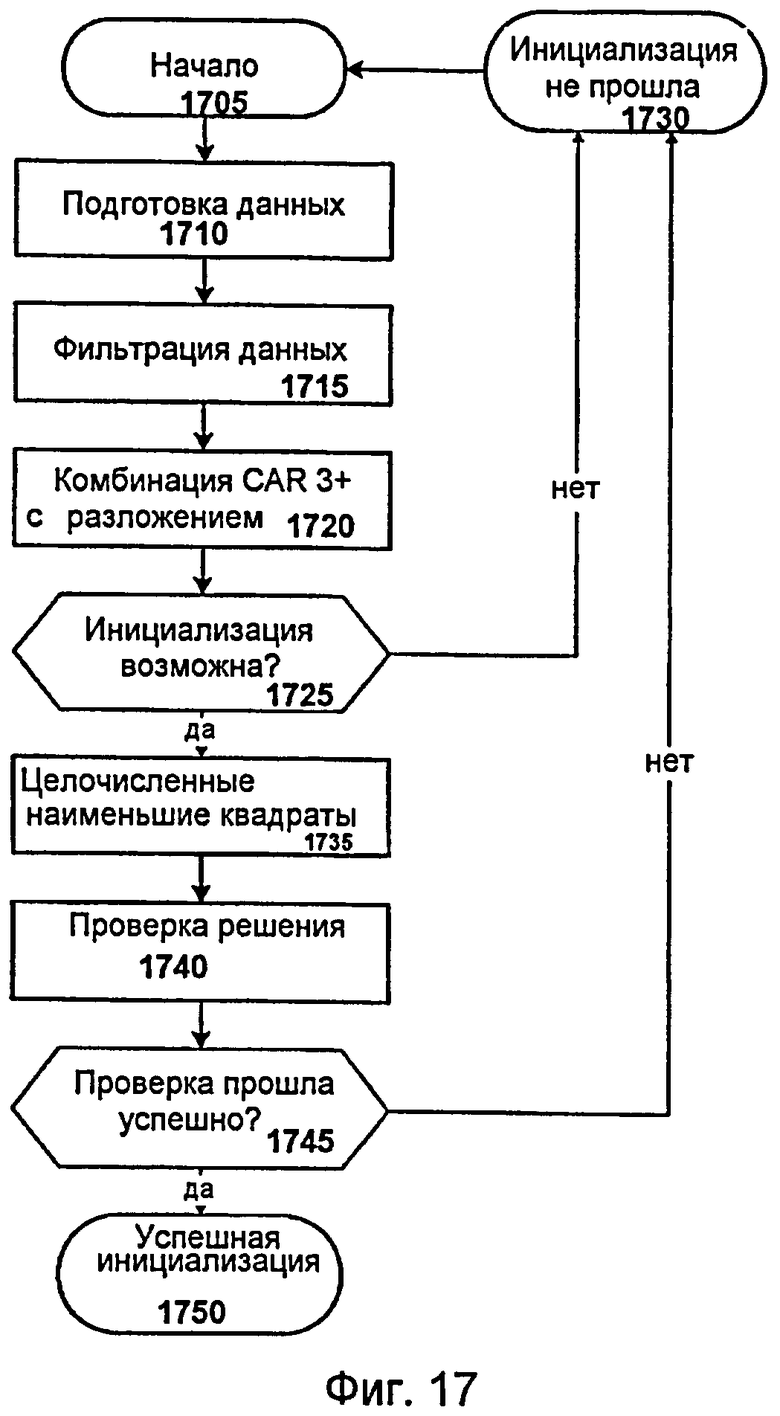
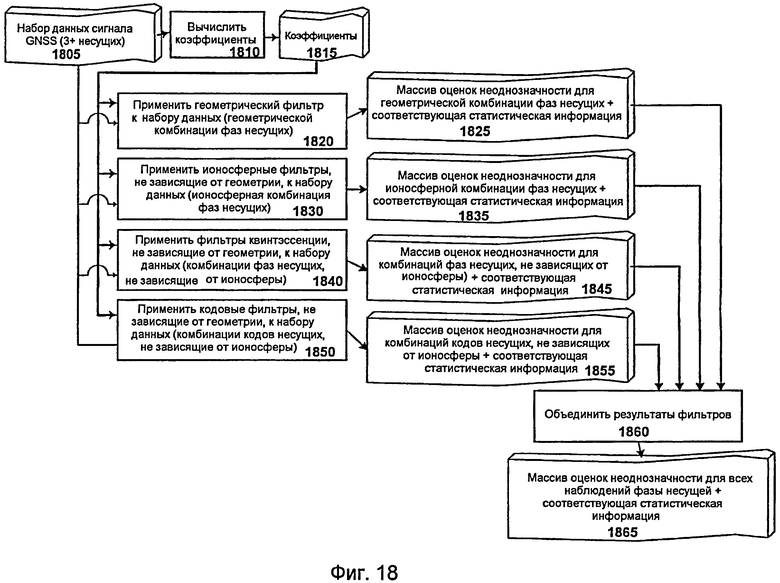
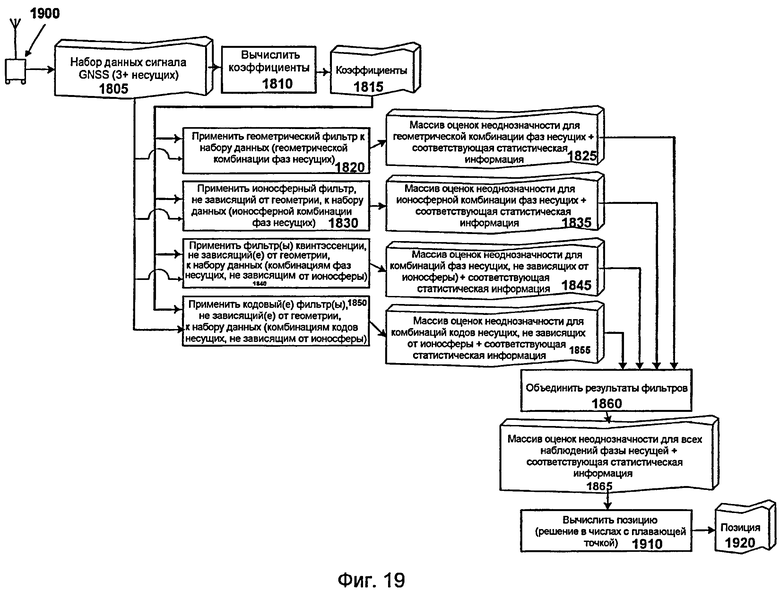
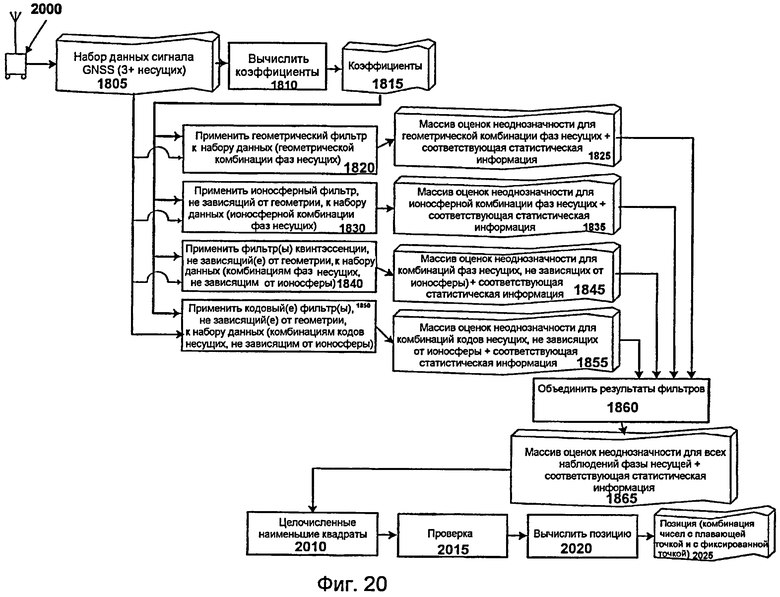
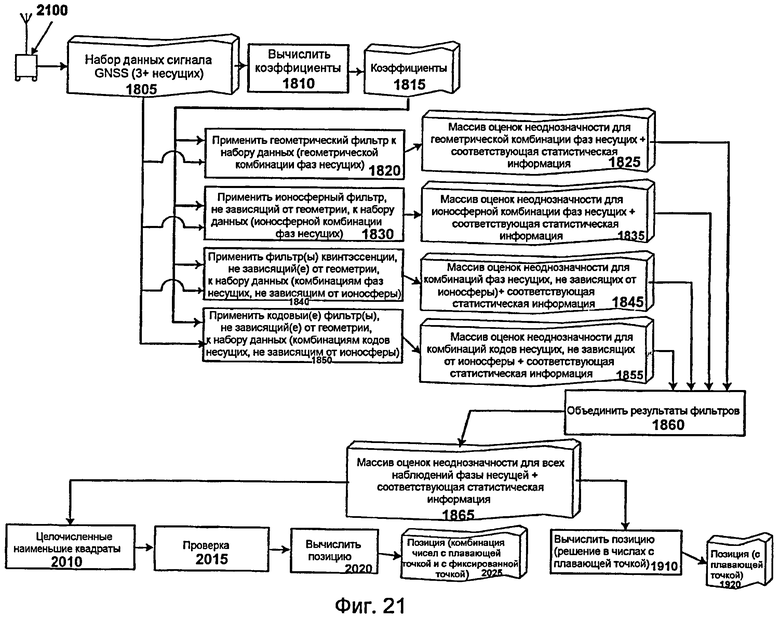
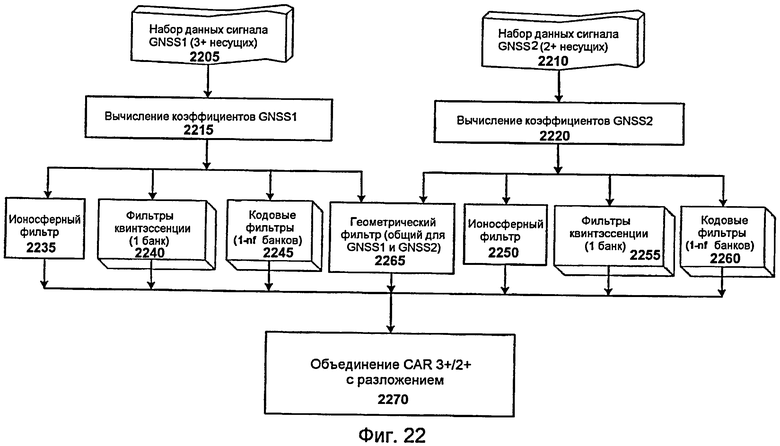
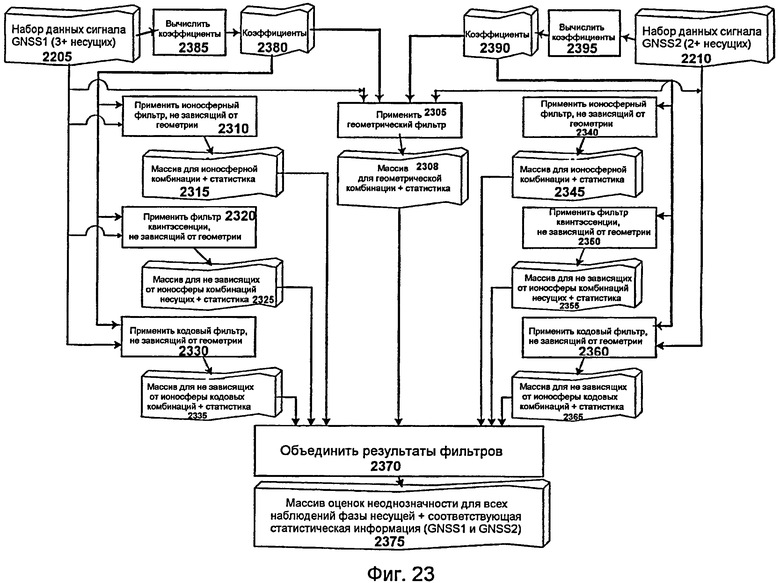
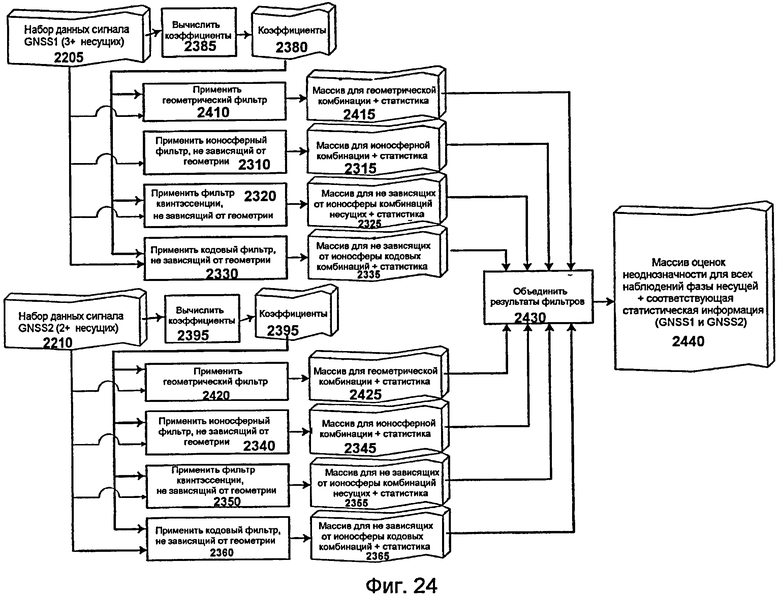
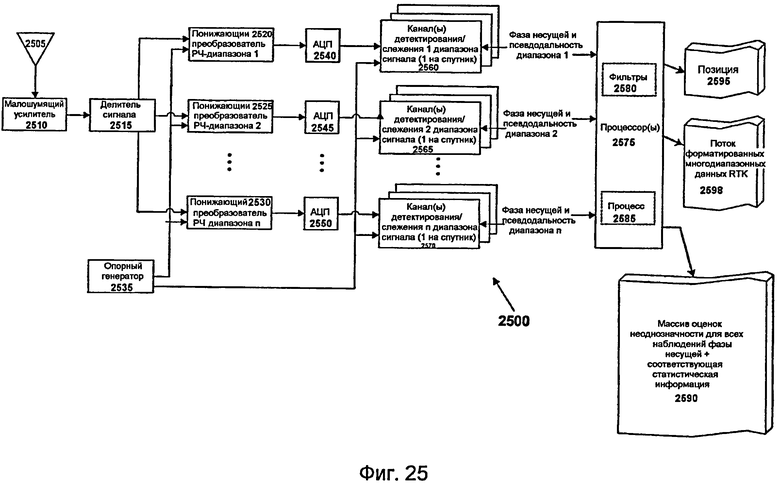
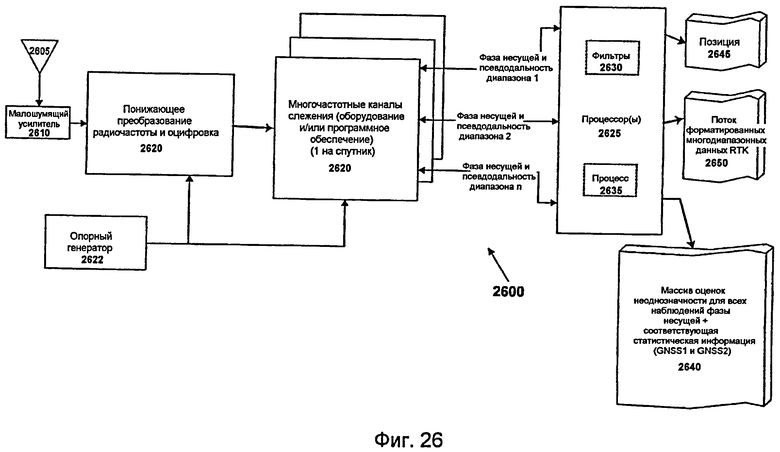
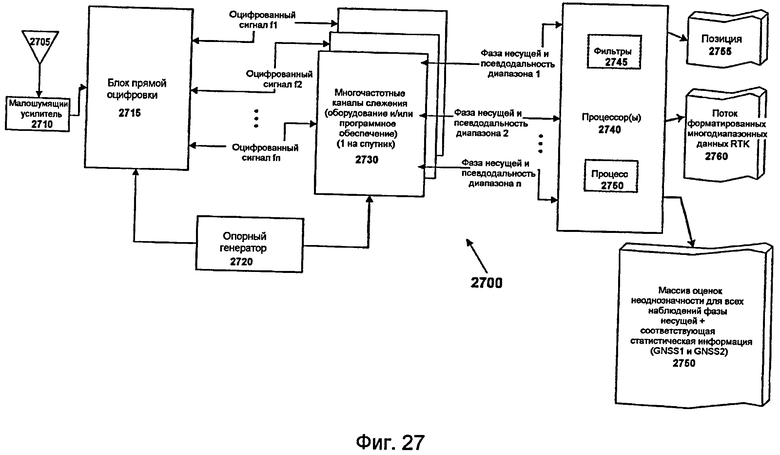
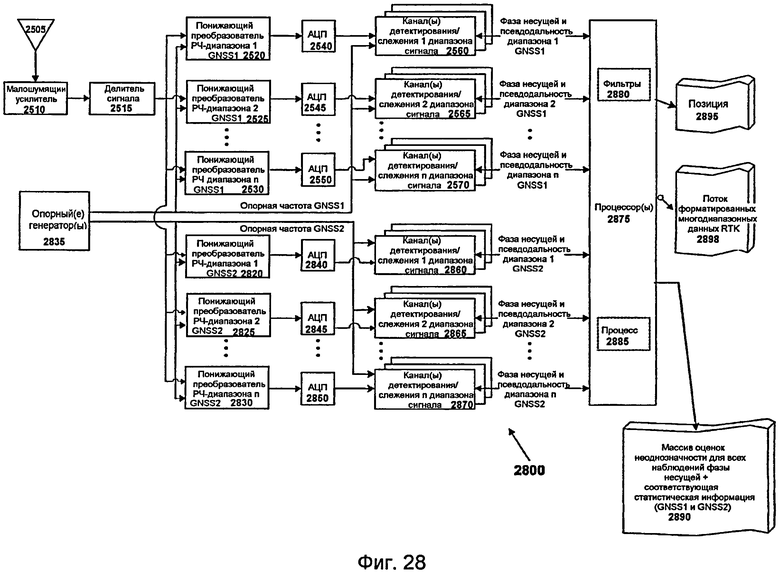
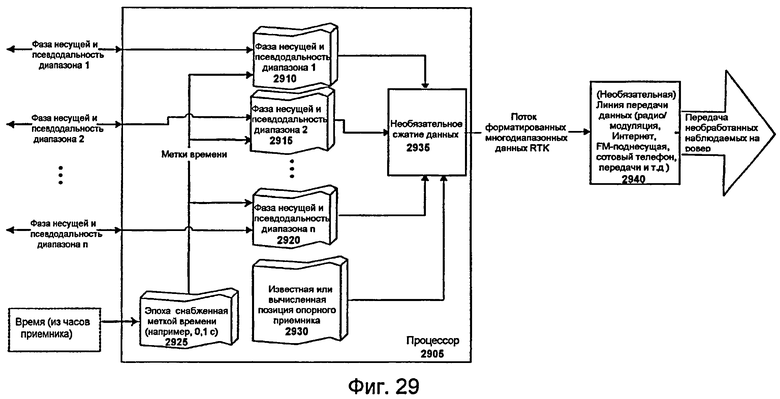
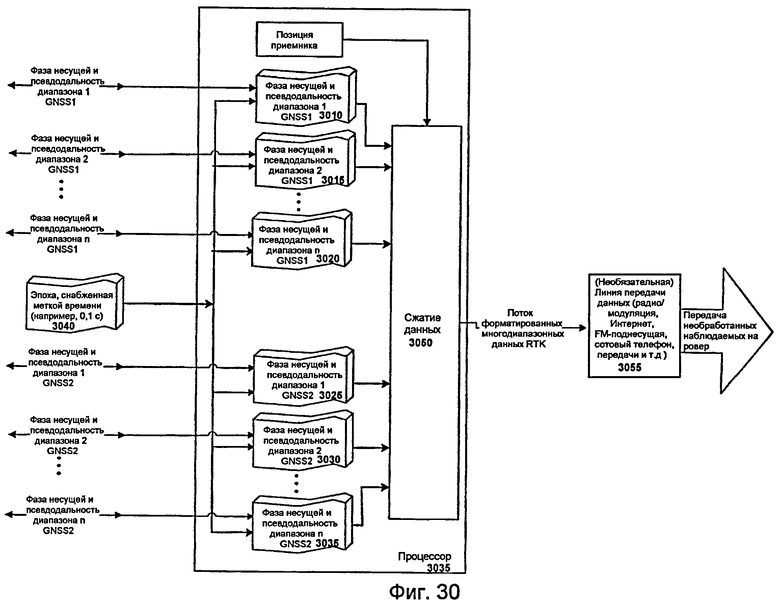
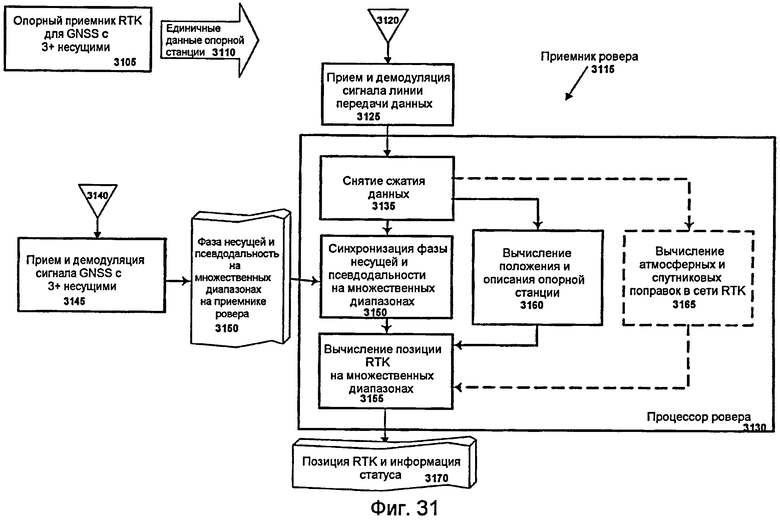
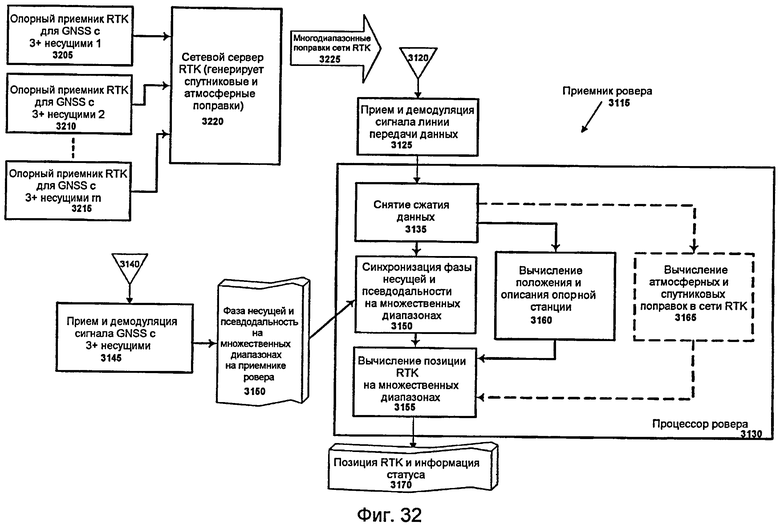
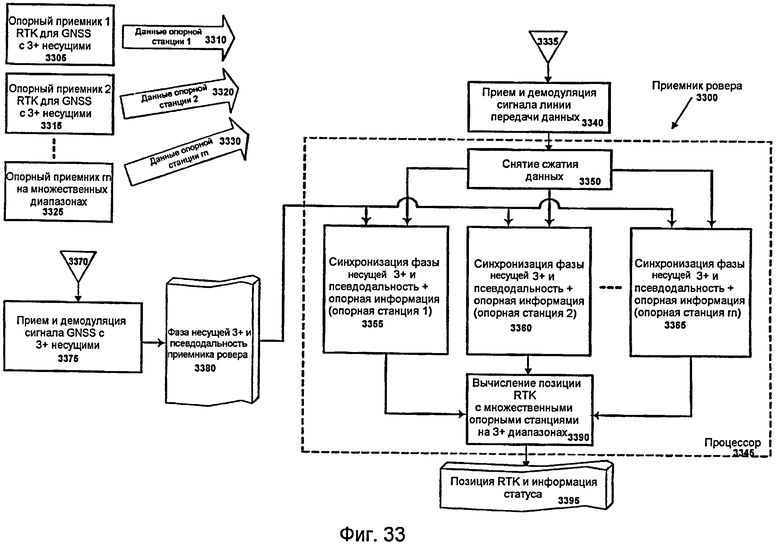
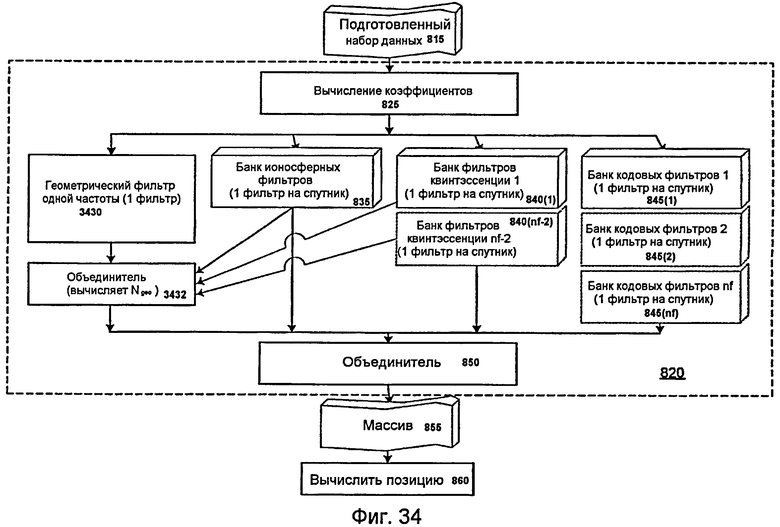
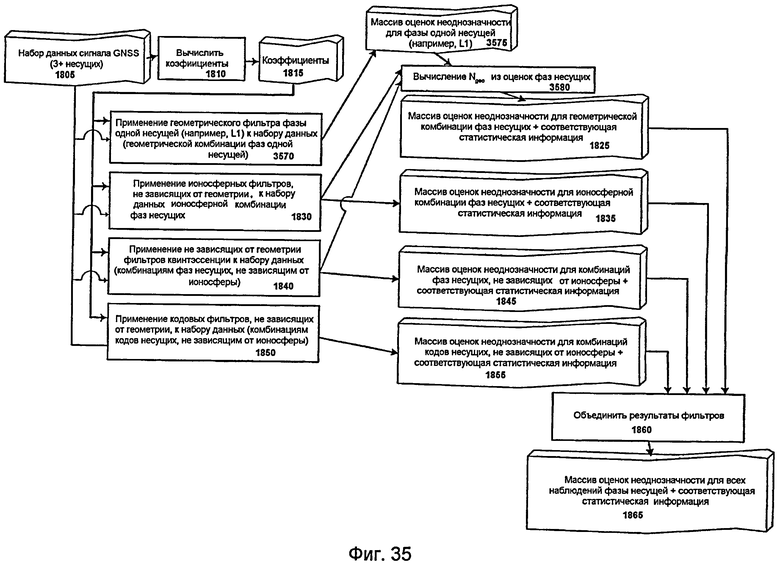
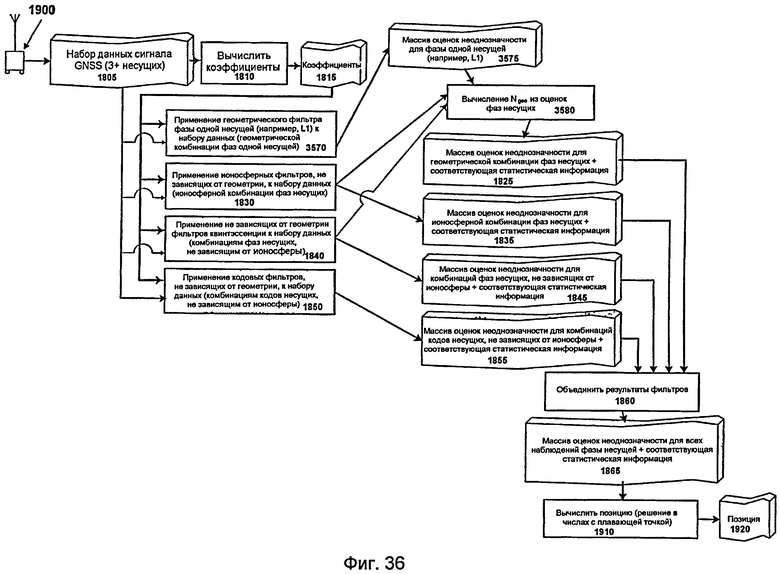
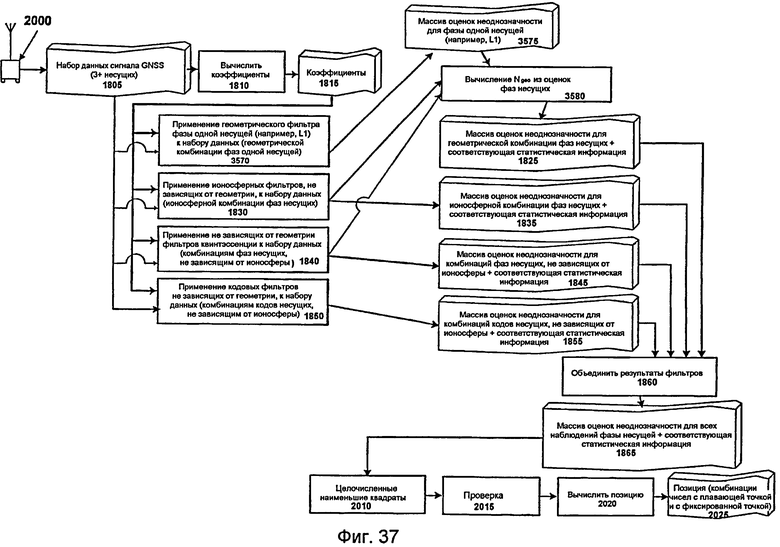
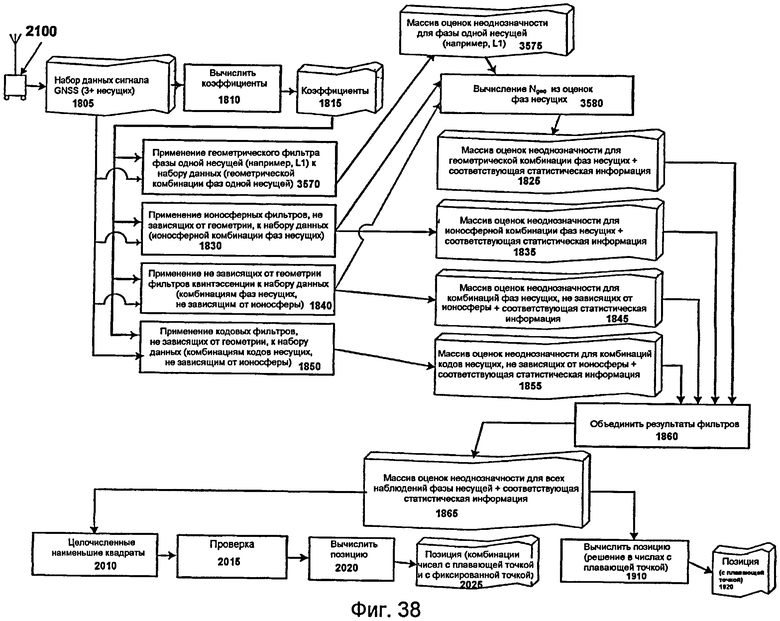
Изобретение относится к технике связи и может использоваться в системах связи с тремя или более несущими. Технический результат состоит в повышении скорости определения неоднозначности сигналов GNSS. Для этого геометрический фильтр применяется к набору данных сигнала GNSS с использованием геометрической комбинации фаз несущих для получения массива оценок неоднозначности для геометрической комбинации фаз несущих и соответствующей статистической информации. Банк ионосферных фильтров применяется к набору данных сигнала GNSS с использованием ионосферной, не зависящей от геометрии, комбинации фаз несущих для получения массива оценок неоднозначности для ионосферной комбинации фаз несущих и соответствующей статистической информации. По меньшей мере, один кодовый фильтр применяется к набору данных сигнала GNSS с использованием совокупности комбинаций кодов несущих, не зависящих от геометрии и не зависящих от ионосферы, для получения массива оценок неоднозначности для комбинаций кодов несущих и соответствующей статистической информации. Полученные массивы объединяются для получения объединенного массива оценок неоднозначности для всех наблюдений фазы несущей и соответствующей статистической информации. 4 н. и 16 з.п. ф-лы, 40 ил.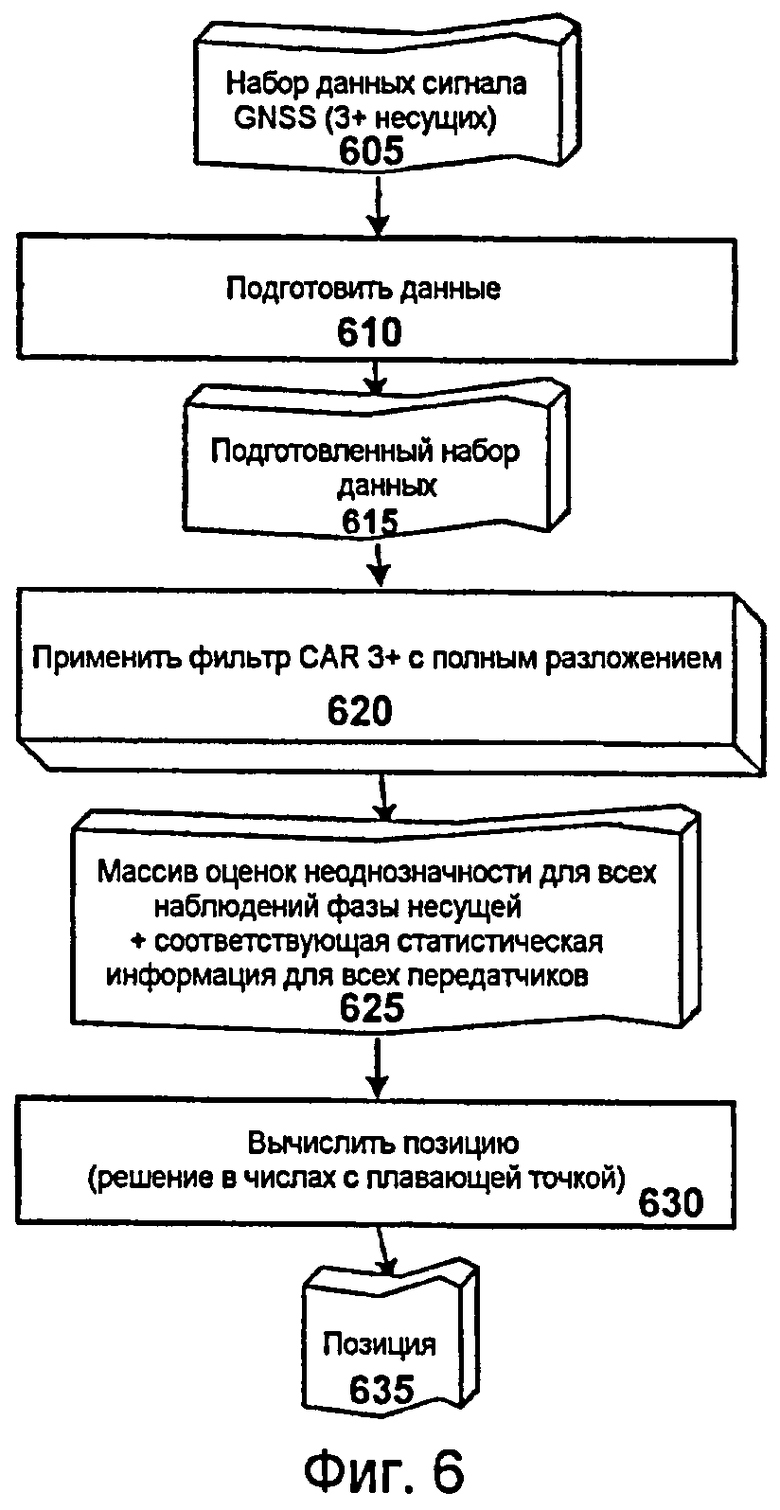
1. Способ обработки первого набора данных сигнала GNSS, выведенного из, по меньшей мере, трех несущих сигналов навигационной системы первой группы передатчиков, и второго набора данных сигнала GNSS, выведенного из двух несущих сигналов навигационной системы второй группы передатчиков, содержащий
а. применение к первому набору данных сигнала GNSS и второму набору данных сигнала GNSS геометрического фильтра с использованием геометрической комбинации фаз несущих для получения массива оценок неоднозначности для геометрической комбинации фаз несущих и соответствующей статистической информации,
b. применение к первому набору данных сигнала GNSS первого банка ионосферных фильтров с использованием ионосферной не зависящей от геометрии комбинации фаз несущих для получения массива оценок неоднозначности для ионосферной комбинации фаз несущих первого банка ионосферных фильтров и соответствующей статистической информации,
с. применение к первому набору данных сигнала GNSS, по меньшей мере, одного банка фильтров с использованием не зависящей от геометрии и не зависящей от ионосферы комбинации фаз несущих для получения массива оценок неоднозначности для комбинации фаз несущих, не зависящей от геометрии и не зависящей от ионосферы, и соответствующей статистической информации,
d. применение к первому набору данных сигнала GNSS, по меньшей мере, одного первого кодового фильтра с использованием совокупности комбинаций кодов несущих, не зависящих от геометрии, для получения массива оценок неоднозначности для комбинаций кодов несущих, по меньшей мере, одного первого кодового фильтра и соответствующей статистической информации;
е. применение к второму набору данных сигнала GNSS второго банка ионосферных фильтров с использованием ионосферной не зависящей от геометрии комбинации фаз несущих для получения массива оценок неоднозначности для ионосферной комбинации фаз несущих второго банка ионосферных фильтров и соответствующей статистической информации;
f. применение к второму набору данных сигнала GNSS, по меньшей мере, одного второго кодового фильтра с использованием совокупности комбинаций кодов несущих, не зависящих от геометрии и не зависящих от ионосферы, для получения массива оценок неоднозначности для комбинаций кодов несущих, по меньшей мере, одного второго кодового фильтра и соответствующей статистической информации; и
g. объединение массивов a., b., c., d., e. и f. для получения объединенного массива оценок неоднозначности для всех комбинаций фаз несущих и соответствующей статистической информации.
2. Способ по п.1, в котором первый набор данных сигнала GNSS выводится из сигналов, принятых от спутников системы GNSS, содержащей одну из системы глобального позиционирования (GPS), системы Glonass (Glonass) и системы Galileo (Galileo).
3. Способ по п.2, в котором второй набор данных сигнала GNSS выводится из сигналов, принятых от спутников системы GNSS, содержащей одну из системы глобального позиционирования (GPS), системы Glonass (Glonass) и системы Galileo (Galileo).
4. Способ по п.1, в котором применение к первому набору данных сигнала GNSS, по меньшей мере, одного первого кодового фильтра содержит применение к первому набору данных сигнала GNSS одного кодового фильтра для каждой несущей первой группы передатчиков.
5. Способ по п.4, в котором применение к второму набору данных сигнала GNSS, по меньшей мере, одного второго кодового фильтра содержит применение к второму набору данных сигнала GNSS одного кодового фильтра для каждой несущей второй группы передатчиков.
6. Способ обработки первого набора данных сигнала GNSS, выведенного из трех несущих сигналов навигационной системы первой группы передатчиков, и второго набора данных сигнала GNSS, выведенного из двух несущих сигналов навигационной системы второй группы передатчиков, содержащий
a. применение к первому набору данных сигнала GNSS первого геометрического фильтра с использованием геометрической комбинации фаз несущих для получения массива оценок неоднозначности для геометрической комбинации фаз несущих первого геометрического фильтра и соответствующей статистической информации,
b. применение к первому набору данных сигнала GNSS первого банка ионосферных фильтров с использованием ионосферной не зависящей от геометрии комбинации фаз несущих для получения массива оценок неоднозначности для ионосферной комбинации фаз несущих первого банка ионосферных фильтров и соответствующей статистической информации,
c. применение к первому набору данных сигнала GNSS, по меньшей мере, одного банка фильтров с использованием не зависящей от геометрии и не зависящей от ионосферы комбинации фаз несущих для получения массива оценок неоднозначности для комбинации фаз несущих, не зависящей от геометрии и не зависящей от ионосферы, и соответствующей статистической информации,
d. применение к первому набору данных сигнала GNSS, по меньшей мере, одного первого кодового фильтра с использованием совокупности комбинаций кодов несущих, не зависящих от геометрии, для получения массива оценок неоднозначности для комбинаций кодов несущих, по меньшей мере, одного первого кодового фильтра и соответствующей статистической информации;
e. применение к второму набору данных сигнала GNSS второго геометрического фильтра с использованием геометрической комбинации фаз несущих для получения массива оценок неоднозначности для геометрической комбинации фаз несущих второго геометрического фильтра и соответствующей статистической информации;
f. применение к второму набору данных сигнала GNSS второго банка ионосферных фильтров с использованием ионосферной не зависящей от геометрии комбинации фаз несущих для получения массива оценок неоднозначности для ионосферной комбинации фаз несущих второго банка ионосферных фильтров и соответствующей статистической информации;
g. применение к второму набору данных сигнала GNSS, по меньшей мере, одного второго кодового фильтра с использованием совокупности комбинаций кодов несущих, не зависящих от геометрии и не зависящих от ионосферы, для получения массива оценок неоднозначности для комбинаций кодов несущих, по меньшей мере, одного второго кодового фильтра и соответствующей статистической информации; и
h. объединение массивов a., b., c., d., e., f. и g. для получения объединенного массива оценок неоднозначности для всех комбинаций фаз несущих и соответствующей статистической информации.
7. Способ по п.6, в котором первый набор данных сигнала GNSS выводится из сигналов, принятых от спутников системы GNSS, содержащей одну из системы глобального позиционирования (GPS), системы Glonass (Glonass) и системы Galileo (Galileo).
8. Способ по п.7, в котором второй набор данных сигнала GNSS выводится из сигналов, принятых от спутников системы GNSS, содержащей одну из системы глобального позиционирования (GPS), системы Glonass (Glonass) и системы Galileo (Galileo).
9. Способ по п.6, в котором применение к первому набору данных сигнала GNSS, по меньшей мере, одного первого кодового фильтра содержит применение к первому набору данных сигнала GNSS одного кодового фильтра для каждой несущей первой группы передатчиков.
10. Способ по п.9, в котором применение к второму набору данных сигнала GNSS, по меньшей мере, одного второго кодового фильтра содержит применение к второму набору данных сигнала GNSS одного кодового фильтра для каждой несущей второй группы передатчиков.
11. Устройство для обработки первого набора данных сигнала GNSS, выведенного из, по меньшей мере, трех несущих сигналов навигационной системы первой группы передатчиков, и второго набора данных сигнала GNSS, выведенного из двух несущих сигналов навигационной системы второй группы передатчиков, содержащее
a. геометрический фильтр, использующий геометрическую комбинацию фаз несущих для получения из первого набора данных сигнала GNSS массива оценок неоднозначности для геометрической комбинации фаз несущих и соответствующей статистической информации,
b. первый банк ионосферных фильтров, использующий ионосферную не зависящую от геометрии комбинацию фаз несущих для получения из первого набора данных сигнала GNSS массива оценок неоднозначности для ионосферной комбинации фаз несущих и соответствующей статистической информации,
c. по меньшей мере, один банк фильтров, использующий не зависящую от геометрии и не зависящую от ионосферы комбинацию фаз несущих для получения из первого набора данных сигнала GNSS массива оценок неоднозначности для комбинации фаз несущих, не зависящей от геометрии и не зависящей от ионосферы, и соответствующей статистической информации,
d. по меньшей мере, один первый кодовый фильтр, использующий совокупность комбинаций кодов несущих, не зависящих от геометрии, для получения из первого набора данных сигнала GNSS массива оценок неоднозначности для комбинаций кодов несущих и соответствующей статистической информации;
e. второй банк ионосферных фильтров, использующий ионосферную не зависящую от геометрии комбинацию фаз несущих для получения из второго набора данных сигнала GNSS массива оценок неоднозначности для ионосферной комбинации фаз несущих второго банка ионосферных фильтров и соответствующей статистической информации;
f. по меньшей мере, один второй кодовый фильтр, использующий совокупность комбинаций кодов несущих, не зависящих от геометрии и не зависящих от ионосферы, для получения из второго набора данных сигнала GNSS массива оценок неоднозначности для комбинаций кодов несущих, по меньшей мере, одного второго кодового фильтра и соответствующей статистической информации; и
g. объединитель для формирования из массивов, полученных фильтрами a., b., c., d., e. и f. объединенного массива оценок неоднозначности для всех комбинаций фаз несущих и соответствующей статистической информации.
12. Устройство по п.11, в котором первый набор данных сигнала GNSS выведен из сигналов, принятых от спутников системы GNSS, содержащей одну из системы глобального позиционирования (GPS), системы Glonass (Glonass) и системы Galileo (Galileo).
13. Устройство по п.12, в котором второй набор данных сигнала GNSS выведен из сигналов, принятых от спутников системы GNSS, содержащей одну из системы глобального позиционирования (GPS), системы Glonass (Glonass) и системы Galileo (Galileo).
14. Устройство по п.11, в котором, по меньшей мере, один первый кодовый фильтр содержит один кодовый фильтр для каждой несущей первой группы передатчиков.
15. Устройство по п.14, в котором, по меньшей мере, один второй кодовый фильтр содержит один кодовый фильтр для каждой несущей второй группы передатчиков.
16. Устройство для обработки первого набора данных сигнала GNSS, выведенного из, по меньшей мере, трех несущих сигналов навигационной системы первой группы передатчиков, и второго набора данных сигнала GNSS, выведенного из двух несущих сигналов навигационной системы второй группы передатчиков, содержащее
a. первый геометрический фильтр, использующий геометрическую комбинацию фаз несущих для получения из первого набора данных сигнала GNSS массива оценок неоднозначности для геометрической комбинации фаз несущих первого геометрического фильтра и соответствующей статистической информации,
b. первый банк ионосферных фильтров, использующий ионосферную не зависящую от геометрии комбинацию фаз несущих для получения из первого набора данных сигнала GNSS массива оценок неоднозначности для ионосферной комбинации фаз несущих и соответствующей статистической информации,
c. по меньшей мере, один банк фильтров, использующий не зависящую от геометрии и не зависящую от ионосферы комбинацию фаз несущих для получения из первого набора данных сигнала GNSS массива оценок неоднозначности для комбинации фаз несущих, не зависящей от геометрии и не зависящей от ионосферы, и соответствующей статистической информации,
d. по меньшей мере, один первый кодовый фильтр, использующий совокупность комбинаций кодов несущих, не зависящих от геометрии, для получения из первого набора данных сигнала GNSS массива оценок неоднозначности для комбинаций кодов несущих и соответствующей статистической информации;
e. второй геометрический фильтр, использующий геометрическую комбинацию фаз несущих для получения из второго набора данных сигнала GNSS массива оценок неоднозначности для геометрической комбинации фаз несущих второго геометрического фильтра и соответствующей статистической информации,
f. второй банк ионосферных фильтров, использующих ионосферную не зависящую от геометрии комбинацию фаз несущих для получения из второго набора данных сигнала GNSS массива оценок неоднозначности для ионосферной комбинации фаз несущих второго банка ионосферных фильтров и соответствующей статистической информации;
g. по меньшей мере, один второй кодовый фильтр, использующий совокупность комбинаций кодов несущих, не зависящих от геометрии и не зависящих от ионосферы, для получения из второго набора данных сигнала GNSS массива оценок неоднозначности для комбинаций кодов несущих, по меньшей мере, одного второго кодового фильтра и соответствующей статистической информации; и
h. объединитель для формирования из массивов, полученных фильтрами a., b., c., d., e., f. и g., объединенного массива оценок неоднозначности для всех комбинаций фаз несущих и соответствующей статистической информации.
17. Устройство по п.16, в котором первый набор данных сигнала GNSS выведен из сигналов, принятых от спутников системы GNSS, содержащей одну из системы глобального позиционирования (GPS), системы Glonass (Glonass) и системы Galileo (Galileo).
18. Устройство по п.17, в котором второй набор данных сигнала GNSS выведен из сигналов, принятых от спутников системы GNSS, содержащей одну из системы глобального позиционирования (GPS), системы Glonass (Glonass) и системы Galileo (Galileo).
19. Устройство по п.16, в котором, по меньшей мере, один первый кодовый фильтр содержит один кодовый фильтр для каждой несущей первой группы передатчиков.
20. Устройство по п.19, в котором, по меньшей мере, один второй кодовый фильтр содержит один кодовый фильтр для каждой несущей второй группы передатчиков.
| US 5805108 A, 08.09.1998 | |||
| ЦИФРОВОЙ ПРИЕМНИК СПУТНИКОВОЙ НАВИГАЦИИ | 1995 |
|
RU2090902C1 |
| Способ футеровки центробежной формы центробежная форма | 1974 |
|
SU501829A1 |
| Устройство для слежения за движущимся объектом | 1974 |
|
SU493784A1 |

