Изобретение относится к устройствам образного отображения информации, используемой пилотом и членами экипажа при пилотировании вертолетом, а именно к командно-пилотажным индикаторам (КПИ). Наиболее близким по технической сущности к заявляемому техническому решению является «Командно-пилотажный индикатор». Патент на изобретение РФ №2539708 заявка №2013158499/11 решение о выдаче патента приоритет от 30 декабря 2013 г. МПК G01C 23/00, G05D 1/00, который состоит из экрана, на котором индицируются:
- неподвижный относительно центра индикационного поля экрана отсчетный индекс "Самолет", выполненный в виде одной горизонтальной прямой, символизирующей крылья летательного аппарата (ЛА), и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии и обозначающий текущее положение вертолета в пространстве;
- подвижный индекс "Лидер", выполненный в виде одной горизонтальной прямой, символизирующей крылья ЛА и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии, а также перемещения по вертикали и горизонтали относительно индекса "Самолет" и обозначающий требуемое положение вертолета в пространстве.
- генератор символов соединенный с экраном,
Средства управления подвижным индексом "Лидер", выполнены в виде блоков вычисления характеристик "Лидера":
- блока вычисления параметров текущего угла скольжения;
- блока вычисления значения расчетного угла крена;
- блока вычисления расчетного угла скольжения;
- блока расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА;
- блока вычисления значения расчетного угла тангажа;
- блока расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА, на входы которых поступают сигналы из систем ЛА, а с выходов которых на генератор символов поступают сигналы в соответствии с величиной ошибки управления по высоте, обеспечивающие перемещение индекса "Лидер" по индикационному полю в вертикальном направлении, а также сигналы индицирующие индекс "радиовысота" и неподвижную неравномерную шкалу значения высоты полета, индицируемую на вертикальной стороне границы индикационного поля экрана с нулевым значением высоты, расположенной на уровне горизонтальной линии, проходящей через центр индикационного поля экрана; Индекс "Самолет" и индекс "Лидер" выполнены с возможностью одновременного отображения угла скольжения и угла тангажа, путем индикации треугольника. Основание треугольника равно длине горизонтальной прямой линии, символизирующей крылья ЛА, а положение вершины треугольника соответствует текущему значению угла тангажа и угла скольжения для индекса "Самолет" и отклонению от заданного значения угла тангажа и угла скольжения для индекса "Лидер". Индекс "Лидер" выполнен с возможностью поворота вокруг центра симметрии в соответствии с величиной ошибки по углу крена, увеличением или уменьшением линейных размеров при увеличении или уменьшении, соответственно, заданной скорости полета таким образом, что при нулевых значениях ошибок по всем контролируемым параметрам индекс "Лидер" совмещается с индексом "Самолет", командно-пилотажный индикатор (КПИ) снабжен: блоком учета расхода в полете массы полезной нагрузки вертолета, блоком, индицирующим указатель скорости полета вертолета, указатель скорости полета вертолета с числовой шкалой, индекс указателя текущей скорости полета вертолета, индекс указателя заданной скорости полета вертолета, блоком вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значения параметра продольного расстояния от центра масс вертолета до оси несущего винта, блоком расчета прогнозируемой скорости полета вертолета и переключателем блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости, причем, вход блока учета расхода в полете массы полезной нагрузки вертолета соединен с системами ЛА по параметрам расходуемой в полете массы полезной нагрузки вертолета, а выход соединен с входом блока вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значения параметра продольного расстояния от центра масс вертолета до оси несущего винта по параметру расходуемой в полете полезной нагрузки вертолета, выход которого соединен с первым входом блока расчета прогнозируемой скорости полета вертолета по параметру продольного расстояния от центра масс вертолета до оси несущего винта, а второй вход блока расчета прогнозируемой скорости полета вертолета соединен через переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости по параметру текущего значения угла тангажа, а выход блока прогнозируемой скорости полета вертолета по параметру заданной скорости полета вертолета и выход блока системы автоматического управления полетом по параметру текущей скорости полета вертолета соединены с входом блока индицирующего указатель скорости полета вертолета, выход которого соединен с генератором символов, который выполнен с возможностью индикации прибора указателя скорости полета вертолета с числовой шкалой и индексом указателя текущей скорости полета вертолета и индексом указателя заданной скорости полета вертолета.
В известном командно-пилотажном индикаторе для горизонтального участка маршрута изменение значения текущей скорости полета вертолета на другое значение скорости полета вертолета обусловлено динамическими свойствами вертолета. В первом приближении динамические свойства вертолета представлены формулой Vтек=f(υ°тек, Xт(t)), в которой (Vтек) - текущее значение вектора скорости полета вертолета, (υ°тек) - текущее значение угла тангажа и (Хт(t)) - текущее значение параметра продольного расстояния от центра масс вертолета до оси несущего винта. Летчик, изменяя текущую скорость полета своего вертолета, обращает внимание на указатель скорости полета вертолета (УС), в котором индексом указателя текущей скорости полета отмечено числовое значение текущей скорости полета вертолета, а индексом указателя заданной скорости полета вертолета отмечено числовое значение будущей скорости полета, соответствующей текущему положению тангажа. Если летчик видит, что индекс указателя текущей скорости полета и индекс указателя заданной скорости полета вертолета совпадают, то вертолет находится в сбалансированном режиме полета. Переводя систему управления полетом вертолета в директорный режим ручного управления полетом по углу тангажа, высоте и скорости полета, летчик (переключателем блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости (вАП)) выключает в блоке автопилота функций автоматической стабилизации (АС) работу блока автопилота функции стабилизации по тангажу (Aυ), блока автопилота функции стабилизации по высоте (Ан) и блока автопилота функции стабилизации по скорости (Av). Затем органами управления (ОУ) изменяет угол тангажа, что приводит к изменению величины скорости полета вертолета. Этот маневр фиксируется основными системами вертолета и в параметрическом виде (через протоколы обмена) передается в блок системы автоматического управления полетом (САУП). Из протокола обмена данных, поступающих с выхода блока инерциальной навигационной системы (ИНС), выбирается только один параметр - (υ°тек), который передается на вход блока расчета прогнозируемой скорости полета вертолета (ПС). На другой вход блока расчета прогнозируемой скорости полета вертолета (ПС) постоянно поступает значение параметра Хт(t) - продольное расстояние от центра масс вертолета до оси несущего винта. В блоке расчета прогнозируемой скорости полета вертолета (ПС) по аналитическим формулам функциональной зависимости вычисляется числовое значение прогнозируемой скорости полета вертолета Vзад=Vпр=f(υ°тек, Xт(t)=const) для горизонтального участка маршрута. Летчик изменяет угол тангажа вертолета на горизонтальном участке маршрута до тех пор, пока индекс указателя заданной скорости полета вертолета не установится на шкале прибора на новое цифровое значение заданной скорости полета. В этот момент времени летчик переключателем блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости (вАП) включает в работу в блоке автопилота функций автоматической стабилизации (АС) блок автопилота функции стабилизации по тангажу (Aυ), блок автопилота функции стабилизации по высоте (Ан) и блок автопилота функции стабилизации по скорости (Av). Тем самым летчик возвращает систему управления вертолетом в директорный режим автоматического управления полетом с новыми параметрами стабилизации по углу тангажа, высоте и скорости полета. Как результат этих действий на экране командно-пилотажного индикатора летчик увидит на индикационном поле экрана изменившуюся фигуру «Лидера», соответствующую (Vзад) - заданной скорости полета, а на навигационном поле экрана - указатель скорости полета вертолета, (УС) показывающий текущую скорость полета вертолета и заданную скорость полета вертолета, которые обозначены соответствующими указателями индексов, показывающими на разные числовые значения.
В момент перехода на директорный режим автоматического управления полетом, из протоколов обмена текущих выходных параметров полета с выхода блока системы автоматического управления полетом (САУП) выбирается последний протокол обмена текущих значений выходных параметров полета: время полета на маршруте (Т), текущее значение дальности полета ЛА (Хтек), текущее значение высоты полета вертолета (Нтек), текущее боковое отклонении вертолета (Zтек), программно-заданная высота полета вертолета на исполнение команды «убрать шасси»/«выпустить шасси» (Ншас), заданная скорость полета вертолета (Vзад), текущее значение угла тангажа (υ°тек), моменты инерции (Ixx, Iyy, Izz, Ixy, Ixz, Iyz) для осей связанной системы координат вертолета.
С этого момента времени последний протокол обмена текущих значений выходных параметров полета является параметрическим описанием начальных условий инерционно-массового и пространственного положения вертолета в точке, с которой будет вычислена заданная вновь опорная трехмерная траектория полета вертолета с заданной скоростью в блоке навигационного вычислителя исходных данных (НВ ИД) и блоке навигационного вычислителя расчетных данных (НВ РД). Блок автопилота функций автоматаческой стабилизации (АС) принимает вновь заданные значения параметров полета на маршруте по высоте, скорости и углу тангажа как начальные условия для их стабилизации. Дальнейший директорный режим автоматического полета своего вертолета летчик контролирует в режиме летчика-оператора по изменению на индикационном поле экрана расположение и форму геометрических фигур индексов «Лидер» и «Самолет», а на навигационном поле экрана в указателе скорости полета вертолета (УС) как перемещается индекс текущей скорости полета к новому числовому значению, на которое указывает индекс заданной скорости полета вертолета, не задумываясь о числовом значении скорости полета ЛА на данном участке маршрута. В известном командно-пилотажном индикаторе (КПИ) может случиться так, что в режиме висения в программно-заданной точке маршрута или в полете с равномерным и прямолинейным движением, показания навигационных приборов вертолета, визуализируемых на экране КПИ и имеющих указателем стрелку или подвижную шкалу индикации, как бы «застынут» в одном положении. В случае, когда стрелки навигационных приборов или подвижные шкалы индикации «застыли» в одном положении, летчик должен иметь в виду, что изменяющиеся параметры полета не всегда полно визуализируются навигационными приборами. Это можно объяснить тем, что в датчиках навигационных приборов, измеряющих текущие параметры полета вертолета (скорость, высоту, крен, тангаж, рыскание, угловую скорость и другие), и в точности воспроизведения параметров полета индексами «Самолет», индексами «Лидер», указателями скорости, крена, тангажа, рыскания, угловой скорости и другими, имеется зона нечувствительности. Зоной нечувствительности объясняется недостаточная точность воспроизведения навигационными приборами текущих параметров полета вертолета: скорость, высоту, углы, угловые скорости, ускорения и другие параметры. Приборная визуализация величины текущего параметра полета на индикационном и навигационном поле экрана командно-пилотажного индикатора зависит также от предела измерения этой величины и точности замеряющего датчика. В директорном режиме ручного управлении полетом от летчика требуется высокий профессиональный опыт управления вертолетом, чтобы ювелирно приводить в угловое и линейное движение массу вертолета с задачей точного выдерживания параметров полета или висения над программно-заданной точкой маршрута с обеспечением минимального отклонения от координат точки полета. В таком полете летчику требуется большое количество приближений управляющими движениями органов управления, чтобы удерживать вертолет в заданных параметрах полета. Инерция большой массы вертолета значительно усложняет процесс удержания летчиком вертолет в заданных параметрах полета с минимальными пространственными отклонениями.
Технической задачей заявляемого изобретения является:
- упрощение пилотированием вертолетом, который обеспечивает минимальное пространственное отклонение от заданных параметров за счет повышения информативности изображения на индикационное поле экрана в виде элементов компьютерной графики частиц «Фона», выводимого на экран КПИ и не препятствующего летчику наблюдать управляющие индексы «Самолет», «Лидер», высоту полета и другие навигационные приборы.
- снижение психофизиологической и нервной нагрузки у летчика в процессе ручного удержания им вертолета в заданных параметрах полета, что важно в условиях эмоциональной нагрузки, вибрации, нехватки кислорода, перепада давления, дефицита времени на принятие решения в сложных метеоусловиях полета, при полете на малой высоте, полете над морем и других сложных условиях полета;
- упрощение контроля за выполнением режима полета, так как летчик одним взглядом охватывает на индикационном поле экрана индекс «Самолет», индекс «Лидер», шкалу значения высоты полета вертолета, индекс «радиовысоты» и элементы компьютерной графики частиц «Фона» - средства более точной визуализации изменения пространственного положения вертолета, что в совокупности создает образ визуального полета вертолета в пространстве земной системы координат;
- обеспечение приемлемой безопасности полета и безусловного выполнения полетных заданий летчиками любых квалификаций в любых сложных условиях полета при частичной или полностью вышедшей из строя автоматической части управления, т.е. полностью при ручном управлении.
- повышение безопасности полета за счет комплексного и неразрывного наблюдения за навигационными приборами: указателем скорости полета, высоты полета, угла крена, угла тангажа, угла рыскания, угла курса, вертикальной скорости полета и других.
Техническая задача достигается тем, что командно-пилотажный индикатор вертолета, содержащий экран, на котором индицируются неподвижный относительно центра индикационного поля экрана отсчетный индекс "Самолет", выполненный в виде одной горизонтальной прямой, символизирующей крылья летательного аппарата (ЛА), и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии и обозначающий текущее положение вертолета в пространстве, индицируемый на экране подвижный индекс "Лидер", выполненный в виде одной горизонтальной прямой, символизирующей крылья ЛА и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии, а также перемещения по вертикали и горизонтали относительно индекса "Самолет" и обозначающий требуемое положение в пространстве, генератор символов соединенный с экраном, средства управления подвижным индексом "Лидер", выполненные в виде блока вычисления характеристик "Лидера" а именно блока вычисления параметров текущего угла скольжения, блока вычисления значения расчетного угла крена, блока вычисления расчетного угла скольжения, блока расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА, блока вычисления значения расчетного угла тангажа, блока расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА, на входы которых поступают сигналы из систем ЛА, а с выходов которых на генератор символов поступают сигналы в соответствии с величиной ошибки управления по высоте, обеспечивающие перемещение индекса "Лидер" по индикационному полю в вертикальном направлении, с возможностью индикации индекса "радиовысота" и неподвижной неравномерной шкалы значения высоты полета, индицируемой на вертикальной стороне границы индикационного поля экрана с нулевым значением высоты, расположенным на уровне горизонтальной линии, проходящей через центр индикационного поля экрана, при этом, индекс "Самолет" и индекс "Лидер" выполнены с возможностью одновременного отображения угла скольжения и угла тангажа, путем индикации треугольника, основание которого равно длине горизонтальной прямой линии символизирующей крылья ЛА, а положение вершины треугольника соответствует текущему значению угла тангажа и угла скольжения индексом "Самолет" и отклонению от заданного значения угла тангажа и угла скольжения индексом "Лидер" поворотом индекса "Лидер" вокруг центра симметрии в соответствии с величиной ошибки по углу крена, увеличением или уменьшением линейных размеров индекса «Лидер» при увеличении или уменьшении, соответственно, заданной скорости полета таким образом, что при нулевых значениях ошибок по всем контролируемым параметрам индекс "Лидер" совмещается с индексом "Самолет", средства управления командно-пилотажного индикатора дополнительно используют: блок учета расхода в полете массы полезной нагрузки вертолета, блок индицирующий указатель скорости полета вертолета, указателем скорости полета вертолета с числовой шкалой, индексом указателя текущей скорости полета вертолета, индексом указателя заданной скорости полета вертолета, блок вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значения параметра продольного расстояния от центра масс вертолета до оси несущего винта, блок расчета прогнозируемой скорости полета вертолета, переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости, что дополнительно снабжен: блоком указателем вертикальной скорости полета вертолета, блоком пересчета координат частиц «Фона» фрагмента неподвижной воздушной атмосферы в координаты индикационного поля экрана, блоком, индицирующим частицы «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля экрана, блоком траекторного вычислителя, блоком начальных условий траекторного вычислителя, блоком измерения параметров полета вертолета, причем, вход блока измерения параметров полета соединен с основными системами вертолета кинематическими параметрами числа оборотов несущего винта, углов атаки лопастей несущего винта, скорости набегающего потока, общего шаг несущего винта, а выход блока измерения параметров полета соединен с входом блока системы автоматического управления полетом вертолета по параметру тяги несущего винта, вход блока системы автоматического управления полетом соединен с выходом блока инерциальной навигационной системы по параметрам проекции вектора текущей угловой скорости вертолета на оси связанной с вертолетом системы координат, выход блока системы автоматического управления полетом соединен с входом блока начальных условий траекторного вычислителя по параметрам: тяги несущего винта, текущего значения дальности полета вертолета, текущего значения высоты полета вертолета, текущего значения бокового отклонения вертолета, программно-заданной дальности на маршруте от точки старта, программно-заданной высоты полета на маршруте, программно-заданного бокового отклонения, проекций текущих значений вектора скорости полета вертолета на оси земной системы координат, проекций вектора текущей угловой скорости вертолета на оси связанной с вертолетом системы координат, текущего углового положения вертолета по углу тангажа, рыскания, крена, текущего угла поворота траектории, текущего угла наклона траектории, текущих горизонтальных проекций вектора средней скорости ветра в земной системе координат, текущей массы вертолета, координат центра масс вертолета в связанной с вертолетом системе координат, текущего значения продольного расстояния от оси несущего винта до центра масс вертолета, моментов инерции вертолета в полете, а выход блока начальных условий траекторного вычислителя соединен с входом блока траекторного вычислителя по параметрам начальных условий для интегрирования уравнений пространственного движения виртуального вертолета: тяги несущего винта, текущего значения дальности полета вертолета, текущего значения высоты полета вертолета, текущего значения бокового отклонения вертолета, программно-заданной дальности на маршруте от точки старта, программно-заданной высоты полета на маршруте, программно-заданного бокового отклонения, проекций текущих значений вектора скорости полета вертолета на оси земной системы координат, проекций вектора текущей угловой скорости вертолета на оси связанной с вертолетом системы координат, текущего углового положения вертолета по углу тангажа, рыскания, крена, текущего угла поворота траектории, текущего угла наклона траектории, текущих горизонтальных проекций вектора средней скорости ветра в земной системе координат, текущей массы виртуального вертолета, координатам центра масс вертолета в связанной с вертолетом системе координат, текущего значения продольного расстояния от оси несущего винта до центра масс вертолета, моментам инерции виртуального вертолета в полете, выход блока траекторного вычислителя соединен с входом блока системы автоматического управления полетом по прогнозируемым числовым значениям параметров полета виртуального вертолета: координатам центра масс текущей точки траектории полета виртуального вертолета, проекциям вектора скорости полета виртуального вертолета на оси земной системы координат, проекциям вектора угловой скорости виртуального вертолета на оси связанной с виртуальным вертолетом системы координат, угловому положению виртуального вертолета по углу тангажа, углу рыскания и углу крена, текущим разностям между вычисленными прогнозируемыми значениями параметров полета виртуального вертолета и программно-заданными значениями параметров полета вертолета управляемого летчиком в осях земной системы координат, причем выход блока системы автоматического управления полетом по параметру проекции вектора текущей скорости полета вертолета на вертикальную ось земной системы координат соединен с входом блока указателя вертикальной скорости полета вертолета, выход которого соединен с входом блока генератора символов, а выход блока системы автоматического управления полетом по параметру текущих разностей между вычисленными прогнозируемыми значениями параметров полета виртуального вертолета и программно-заданными значениями параметров полета вертолета управляемого летчиком, соединен с входом блока пересчета координат частиц «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля экрана, выход которого соединен по параметру координат частиц «Фона» фрагмента неподвижной воздушной атмосферы с входом блока, индицирующим частицы «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля экрана, выход которого соединен с входом блока генератора символов, причем, блок генератора символов выполнен с возможностью индикации прибора вертикальной скорости полета вертолета на навигационном поле экрана и индикации на индикационном поле экрана координат частиц «Фона» текущего фрагмента неподвижной воздушной атмосферы.
Изобретение поясняется чертежами.
На фиг. 1 Изображена схема сопряжения систем вертолета с командно-пилотажным индикатором.
На фиг. 2 Изображена функциональная схема командно-пилотажного индикатора.
На фиг. 3 Изображен экран командно-пилотажного индикатора с изображением фрагмента частиц «Фона».
На фиг. 4 Изображена опорная траектория полета вертолета.
На фиг. 5 Изображена зона нечувствительности навигационного прибора, измеряющего вертикальную скорость полета вертолета (вариометр).
На фиг. 6 Изображены одновременно: вычисляемый в блоке траекторного вычислителя прогнозируемый параметр полета и измеряемый параметра полета в приборе, имеющем зону нечувствительности.
На фиг. 7 Представлены частицы «Фона» и фрагмент частиц «Фона» неподвижной воздушной атмосферы.
На фиг. 8 Изображена блок-схема алгоритма, реализующего индикацию фрагментов частиц «Фона» (начало).
На фиг. 9 Изображена блок-схема алгоритма, реализующего индикацию фрагментов частиц «Фона» (продолжение фигуры 8).
На фиг. 10 Изображено графическое представление параллельных расчетов в блоке траекторного вычислителя и в блоке системы автоматического управления полетом.
На фиг. 11 Изображены параметры инерционно-массовых характеристик модели вертолета, управляемого летчиком.
На фиг. 12 Изображены параметры инерционно-массовых характеристик модели виртуального вертолета.
На фиг. 13 Изображена схема подключения блока траекторного вычислителя.
Заявляемый командно-пилотажный индикатор вертолета состоит из:
- экрана командно-пилотажного индикатора 1, далее экран 1, разделенного на навигационное поле 2 экрана 1 и индикационное поле 3 экрана 1;
- блока, индицирующего на индикационном поле 3 экрана 1 подвижный индекс неуправляемый летчиком "Лидер" 4, далее "Лидер" 4:
- блока, индицирующего на индикационном поле 3 экрана 1 подвижный индекс управляемого летчиком "Самолет" 5 далее "Самолет" 5;
- блока, индицирующего на навигационном поле 2 и индикационном поле 3 экрана 1 неподвижную неравномерную расположенную на вертикальной стороне границы навигационного поля 2 и индикационного поля 3 экрана 1 шкалу значения высоты 6 полета вертолета, далее шкала высоты 6;
- блока, индицирующего на навигационном поле 2 экрана 1 различную навигационную информацию текущих значений параметров полета вертолета 7 (например: указатель курса, указатель вертикальной скорости полета вертолета (вариометр) и другие приборы);
- блока, индицирующего на экране 1 индекс "радиовысоты" 8;
- блока командно-пилотажного индикатора (КПИ) 9;
- блока системы автоматического управления полетом (САУП) 10;
- блока системы воздушных сигналов (СВС) 11;
- блока инерциальной навигационной системы (ИНС) 12;
- блока навигационного вычислителя исходных данных (НВ ИД) 13;
- блока навигационного вычислителя расчетных данных (НВ РД) 14;
- блока генератора символов (ГС) 15;
- блока вычисления параметров текущего угла скольжения 16;
- блока вычисления значения расчетного угла крена 17;
- блока вычисления расчетного угла скольжения 18;
- блока вычисления коэффициента скорости полета вертолета 19;
- блока расчета отклонения вертолета по высоте полета и коэффициента масштаба отклонения высоты полета вертолета 20;
- блока вычисления значения расчетного угла тангажа 21;
- блока расчета бокового отклонения и коэффициента масштаба бокового отклонения вертолета 22;
- переключателя блоков автопилота функций автоматической стабилизации по тангажу, высоте, скорости (вАП) 23;
- органов управления вертолетом (ОУ) 24;
- блока автопилота функций автоматической стабилизации (АС) 25;
- блока автопилота функции стабилизации по тангажу (Aυ) 26;
- блока автопилота функции стабилизации по высоте (Ан) 27;
- блока автопилота функции стабилизации по скорости (Av) 28;
- блока траекторного вычислителя (ТВ) 29.
- блока начальных условий траекторного вычислителя (НУ ТВ) 30;
- блока расчета прогнозируемой скорости полета вертолета (ПС) 31;
- блока вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значения параметра продольного расстояния от центра масс вертолета до оси несущего винта (ЦМ) 32;
- блока учета расхода в полете массы полезной нагрузки вертолета (например: топливо, грузы, боезапас) (РПН) 33;
- переключателя ввода исходных данных параметров программной трехмерной траектории полета вертолета (В) 34;
- блока индицирующего на индикационном поле 3 экрана 1 команду «убрать шасси»/«выпустить шасси» для индекса "Лидер" 4 (КШ) 35;
- блока внутреннего языка для визуализации переменной шкалы высоты полета вертолета (Ш) 36;
- указателя скорости полета вертолета (УС) 37;
- блока указателя вертикальной скорости полета вертолета (ВС) 38;
- блока пересчета координат частиц «Фона» фрагмента неподвижной воздушной атмосферы в координаты индикационного поля 3 экрана 1 (КФ) 39;
- блока, индицирующего частицы «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1 (ИФ) 40;
- блока, индицирующего указатель скорости полета вертолета, указателем скорости полета вертолета с числовой шкалой, индексом указателя текущей скорости полета вертолета, индексом указателя заданной скорости полета вертолета (БУС) 41;
- блока измерения параметров полета вертолета (ИПП) 42.
Для визуализации параметров полета на индикационном поле 3 и навигационном поле 2 экрана 1 блока командно-пилотажного индикатора (КПИ) 9 летчику вертолета необходимо прежде через переключатель ввода исходных данных параметров программной трехмерной траектории полета вертолета (В) 34 подать на вход блока навигационного вычислителя исходных данных (НВ ИД) 13 заданные параметры трехмерной программной траектории полета подготовленные для расчетов в земной системе координат: время полета на маршруте (Т), программно-заданная дальность на маршруте от точки старта (Хзад), программно-заданную высоту полета на маршруте (Yзад), программно-заданное боковое отклонение (Zзад), программно-заданную высоту полета вертолета на исполнение команды «убрать шасси»/«выпустить шасси» (Ншас), моменты инерции (Ixx, Iyy, Izz, Ixy, Ixz, Iyz) для осей связанной системы координат вертолета.
С первого выхода блока навигационного вычислителя исходных данных (НВ ИД) 13 на вход блока системы автоматического управления полетом (САУП) 10 поступят заданные параметры трехмерной программной траектории полета подготовленные для расчета в земной системе координат: время полета на маршруте (Т), программно-заданная дальность на маршруте от точки старта (Хзад), программно-заданная высота полета на маршруте (Yзад), программно-заданное боковое отклонение (Zзад), программно-заданная высота полета вертолета на исполнение команды «убрать шасси»/«выпустить шасси» (Ншас).
Со второго выхода блока навигационного вычислителя исходных данных (НВ ИД) 13 на вход блока навигационного вычислителя расчетных данных (НВ РД) 14 поступят: время полета на маршруте (Т), заданные параметры трехмерной программной траектории полета подготовленные для расчета в земной системе координат: программно-заданная дальность на маршруте от точки старта (Хзад), программно-заданная высота полета на маршруте (Yзад), программно-заданное боковое отклонение (Zзад), программно-заданная высота полета вертолета на исполнение команды «убрать шасси» /«выпустить шасси» (Ншас), моменты инерции (Ixx, Iyy, Izz, Ixy, Ixz, Iyz) для осей связанной системы координат вертолета.
С выхода блока навигационного вычислителя расчетных данных (НВ РД) 14 на вход блока системы автоматического управления полетом (САУП) 10 поступят (дополнительно заданные параметры полета):
- в земной системе координат (ЗСК) oXgYgZg:
Vxg зад - проекции скорости на ось Xg;
Vyg зад - проекции скорости на ось Yg;
Vzg зад - проекции скорости на ось Zg;
Ψ°зад - угол поворота траектории;
Θ°зад - угол наклона траектории;
- в связанной с вертолетом системе координат oX1Y1Z1:
υ°зад - угол тангажа,
γ°зад - угол крена,
ϕ°зад - угол рыскания.
- моменты инерции для осей связанной системы координат вертолета:
Ixx - центральный момент инерции вдоль оси оХ1;
Iyy - центральный момент инерции вдоль оси oY1;
Izz - центральный момент инерции вдоль оси oZ1;
Ixy - центробежный момент инерции в плоскости oX1Y1;
Ixz - центробежный момент инерции в плоскости oX1Z1;
Iyz - центробежный момент инерции в плоскости oY1Z1.
От основных систем вертолета на вход блока системы автоматического управления полетом (САУП) 10 для вычисления управляющих сигналов и параметров визуализации поступают параметры полета:
- с выхода блока системы воздушных сигналов (СВС) 11 параметры текущего значения высоты полета вертолета (Yтек), текущего значения вектора скорости полета вертолета (Vтек), проекция вектора текущей скорости полета вертолета на вертикальную ось земной системы координат (Vygтек) и текущие горизонтальные проекции вектора средней скорости ветра в земной системе координат - Wind=f(Wxg, Wzg), где: Wind - модуль текущего вектора средней скорости ветра, Wxg, Wzg - горизонтальные проекции вектора средней скорости ветра (Wind) на оси земной системы координат.
С выхода блока инерциальной навигационной системы (ИНС) 12 поступают параметры углового и пространственного положения вертолета: υ°тек, γ°тек, ϕ°тек, соответственно, текущее значение угла тангажа, текущее значение угла крена, текущее значение угла рыскания, проекции вектора текущей угловой скорости вертолета на оси связанной с вертолетом системы координат oX1Y1Z1: вдоль оси оХ1 - (ωхтек); вдоль оси oY1 - (ωутек); вдоль оси oZ1 - (ωz тек) и (Хтек) - текущее значение дальности полета вертолета, (Zтек) - текущее значение бокового отклонения вертолета.
От основных систем вертолета на вход блока измерения параметров полета (ИПП) 42 поступают значения кинематических параметров полета:
- число оборотов несущего винта - Nнв;
- углы атаки лопастей несущего винта - αнв;
- скорость набегающего потока - V∞;
- общий шаг несущего винта - ϕо.
с выхода блока измерения параметров полета (ИПП) 42 на вход блока системы автоматического управления полетом вертолета (САУП) 10 поступает параметр тяги несущего винта - (Тнв).
От основных систем вертолета на вход блока учета расхода в полете массы полезной нагрузки вертолета (например: топливо, грузы, боезапас) (РПН) 33 поступают значения параметров расходуемой в полете массы полезной нагрузки вертолета:
Mm (t, xm, ym, zm) - масса полезной нагрузки;
t - время полета;
xm, ym, zm - координаты центра масс полезной нагрузки
в связанной с вертолетом системе координат.
с выхода блока учета расхода в полете массы полезной нагрузки вертолета (например: топливо, грузы, боезапас) (РПН) 33 параметры массы полезной нагрузки, ее координаты, измеряемые во времени, в связанной с вертолетом системе координат, поступают на вход блока вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значения параметра продольного расстояния от центра масс вертолета до оси несущего винта (ЦМ) 32, в котором определяется текущая масса вертолета (Мв) и координаты центра масс вертолета в связанной с вертолетом системе координат.
Мв (t, хв, ув, zв) - текущая масса вертолета;
t - время полета;
хв, ув, zв - координаты центра масс вертолета в связанной с вертолетом системе координат;
Iххв, Iуув, Izzв, Iхув, Ixzв, Iyzв - моменты инерции вертолета в полете;
Хт(t) - текущее значение продольного расстояния от оси несущего винта до центра масс вертолета.
С первого выхода блока вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значения параметра продольного расстояния от центра масс вертолета до оси несущего винта (ЦМ) 32 в блок системы автоматического управления полетом (САУП) 10 поступают параметры текущей массы вертолета - (Мв), координаты центра масс вертолета в связанной с вертолетом системе координат - (хв, ув, zв), моменты инерции вертолета в полете (Iххв, Iуув, Izzв, Iхув, Ixzв, Iyzв) и текущее значение Xт(t) продольного расстояния от оси несущего винта до центра масс вертолета.
Со второго выхода блока вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значения параметра продольного расстояния от центра масс вертолета до оси несущего винта (ЦМ) 32 на первый вход, блока расчета прогнозируемой скорости полета вертолета (ПС) 31, поступает Xт(t) - текущее значение продольного расстояния от оси несущего винта до центра масс вертолета. На второй вход блока расчета прогнозируемой скорости полета вертолета (ПС) 31 (через переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости (вАП) 23) при работе блока системы автоматического управления полетом (САУП) 10 (в директорном режиме автоматического управления полетом) поступает с выхода блока автопилота функций автоматической стабилизации (АС) 25 текущее значение угла тангажа - υ°тек.
С выхода блока расчета прогнозируемой скорости полета вертолета (ПС) 31 в блок системы автоматического управления полетом (САУП) 10 поступает значение параметра заданной скорости полета вертолета (Vзад), который численно равен скорости, установленной летчиком после получения радиокоманды на изменение скорости полета на следующем участке маршрута - (Vзад=Vпр). Vпр - прогнозируемая скорость полета вертолета.
На вход блока автопилота функций автоматической стабилизации (АС) 25 через переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте, скорости (вАП) 23 при работе блока системы автоматического управления полетом (САУП) 10 в директорном режиме автоматического управления полетом поступает (υ°тек) - текущее значение угла тангажа:, (γ°тек) - текущее значение угла крена, (ϕ°тек) - текущее значение угла рыскания, а также (Yтек) - текущее значение высоты полета вертолета и (Vтек) - текущее значение вектора скорости полета вертолета.
С выхода блока автопилота функций автоматической стабилизации (АС) 25 в блоке системы автоматического управления полетом (САУП) 10 в директорном режиме автоматического управления остаются параметры полета рабочих переменных: υ°зад - заданное значение угла тангажа; Yзад - программно-заданная высота полета на маршруте (Yзад),; γ°зад - заданное значение угла крена; ϕ°зад - заданное значение угла рыскания и Vзад - заданное значение скорости полета вертолета.
Параметры блока системы автоматического управления полетом (САУП) 10 поступившие от основных систем вертолета:
- тяга несущего винта - Тнв;
- текущее значение дальности полета вертолета (Хтек);
- текущее значение высоты полета вертолета (Yтек);
- текущее значение бокового отклонения вертолета (Zтек);
- программно-заданная дальность на маршруте от точки старта (Хзад);
- программно-заданная высота полета на маршруте (Yзад);
- программно-заданное боковое отклонение (Zзад);
- текущее значение вектора скорости полета вертолета - Vтек;
- проекция вектора текущей скорости полета вертолета на вертикальную ось земной системы координат-Vygтек;
- проекции вектора текущей угловой скорости вертолета на оси связанной с вертолетом системы координат - (ωхтек, ωутек, ωzтек);
- текущее угловое положение вертолета: угол тангажа - (υ°тек),
угол рыскания - (ϕ°тек), угол крена - (γ°тек);
- текущий угол поворота траектории - Ψ°тек;
- текущий угол наклона траектории - Θ°тек;
- текущие горизонтальные проекции вектора средней скорости ветра в земной системе координат - Wind=f(Wxg, Wzg), где: Wind - модуль текущего вектора средней скорости ветра, Wxg, Wzg - горизонтальные проекции вектора средней скорости ветра (Wind) на оси земной системы координат.
- текущая масса вертолета - Мв;
- координаты центра масс вертолета в связанной с вертолетом системе координат - хв, ув, zв;
- текущее значение Xт(t) продольного расстояния от оси несущего винта до центра масс вертолета;
- величины моментов инерции вертолета в полете - Iххв, Iуув, Izzв, Iхув, Ixzв, Iyzв;
поступают на вход блока начальных условий траекторного вычислителя (НУ ТВ) 30.
С выхода блока начальных условий траекторного вычислителя (НУ ТВ) 30 на вход блока траекторного вычислителя (ТВ) 29 поступают параметры начальных условий для интегрирования уравнений пространственного движения виртуального вертолета:
- тяга несущего винта - Тнв;
- текущее значение дальности полета вертолета (Хтек);
- текущее значение высоты полета вертолета (Yтек);
- текущее значение бокового отклонения вертолета (Zтек);
- программно-заданная дальность на маршруте от точки старта (Хзад);
- программно-заданная высота полета на маршруте (Yзад);
- программно-заданное боковое отклонение (Zзад);
- проекции вектора текущего значения скорости полета вертолета на оси земной системы координат - (Vxgтек, Vygтек, Vzgтек);
- проекции вектора текущей угловой скорости вертолета на оси связанной с вертолетом системы координат - (ωхтек, ωутек, ωzтек);
- текущее угловое положение вертолета: угол тангажа - (υ°тек),
угол рыскания - (ϕ°тек), угол крена - (γ°тек);
- текущий угол поворота траектории - Ψ°тек,
- текущий угол наклона траектории - Θ°тек;
- текущие горизонтальные проекции вектора средней скорости ветра в земной системе координат - Wind=f(Wxg, Wzg), где: Wind - модуль текущего вектора средней скорости ветра, Wxg, Wzg - горизонтальные проекции вектора средней скорости ветра (Wind) на оси земной системы координат;
- текущая масса виртуального вертолета - Ма;
- координаты текущего центра масс вертолета в связанной с вертолетом системе координат - ха, уа, za;
- текущее значение Xт(t) продольного расстояния от оси несущего винта до центра масс вертолета;
- величины моментов инерции виртуального вертолета в полете - Ixxa, Iyya, Izza, Ixya, Ixza, Iyza.
С выхода блока траекторного вычислителя (ТВ) 29 на вход блока системы автоматического управления полетом вертолета (САУП) 10 поступают прогнозируемые параметры результатов интегрирования уравнений пространственного движения виртуального вертолета:
- значения координат центра масс текущей точки траектории полета виртуального вертолета - Ха, Ya, Za.
- вычисленные в земной системе координат значения проекции вектора текущей скорости полета виртуального вертолета - Vxa, Vya, Vza.
- вычисленные значения проекций вектора угловой скорости виртуального вертолета на оси связанной с виртуальным вертолетом системы координат - ωxa, ωya, ωza.
- текущее угловое положение виртуального вертолета - υ°а, ϕ°а, γ°а угол тангажа, рыскания и крена, соответственно.
- текущая разность между вычисленным прогнозируемым значением параметра полета виртуального вертолета и программно-заданным значением параметра полета вертолета управляемого летчиком, dAx (вдоль оси (oXg) земной системы координат).
- текущие разности между вычисленными прогнозируемыми значениями параметров полета виртуального вертолета и программно-заданными значениями параметров полета вертолета управляемого летчиком, dAy и dAz (вдоль оси (oYg) и вдоль оси (oZg) земной системы координат соответственно).
С выхода блока системы автоматического управления полетом (САУП) 10 на вход блока командно-пилотажного индикатора (КПИ) 9 поступают параметры: - текущее значение высоты полета вертолета - Yтек;
- программно-заданная высота полета на маршруте - Yзад;
- текущее боковое отклонении вертолета - Zтек;
- программно-заданное боковое отклонение - Zзад;
- текущее значение вектора скорости полета вертолета - Vтек;
- программно-заданная скорость полета вертолета - Vзад.
- текущее значение угла поворота траектории - Ψ°тек;
- программно-заданный угол поворота траектории вертолета - Ψ°зад;
- текущее значение угла наклона траектории вертолета - Θ°тек;
- программно-заданный угол наклона траектории вертолета - Θ°зад;
- текущее значение угла тангажа - υ°тек;
- программно-заданное угловое положение вертолета на траектории по углу тангажа - υ°зад;
- текущее значение угла крена - γ°тек;
- программно-заданное угловое положение вертолета на траектории по углу крена - γ°зад;
- текущее значение угла рыскания - ϕ°тек;
- программно-заданное угловое положение вертолета на траектории по углу рыскания ϕ°зад;
- программно-заданная высота полета вертолета на исполнение команды «убрать шасси»/«выпустить шасси» - Ншас;
- проекция вектора текущей скорости полета вертолета на вертикальную ось земной системы координат - Vygтек;
- текущие разности между вычисленными прогнозируемыми значениями параметров полета виртуального вертолета и программно-заданными значениями параметров полета вертолета управляемого летчиком, dAy и dAz (вдоль оси (oYg) и вдоль оси (oZg) земной системы координат соответственно).
Причем, в блоке командно-пилотажного индикатора (КПИ) 9 по параметру Vygтек - проекции вектора текущей скорости полета вертолета на вертикальную ось земной системы координат соединен в блоке генератора символов (ГС) 15 с входом блока указателя вертикальной скорости полета вертолета (ВС) 38, а параметр текущих разностей между вычисленными прогнозируемыми значениями параметров полета виртуального вертолета и программно-заданными значениями параметров полета вертолета управляемого летчиком (dAy, dAz) соединен с входом блока пересчета координат частиц «Фона» фрагмента неподвижной воздушной атмосферы в координаты индикационного поля экрана (КФ) 39, выход которого в блоке генератора символов (ГС) 15 соединен по параметру координат частиц «Фона» (Ye(m), Ze(m)) фрагмента неподвижной воздушной атмосферы в координатах индикационного поля экрана с входом блока, индицирующим частицы «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля экрана (ИФ) 40.
Для визуализации полетной информации в блоке командно-пилотажного индикатора (КПИ) 9, где в блоке генератора символов (ГС) 15 преобразуются в управляющие индексы параметров полета и выводятся на экран 1, по визуальной информации:
- текущее значение угла тангажа - υ°тек;
- расчетное значение угла тангажа - υ°расч;
- текущее значение угла крена - γ°тек;
- расчетное значение угла крена - γ°расч;
- текущее значение угла скольжения - β°тек;
- расчетное значение угла крена - β°расч;
- коэффициента масштаба отклонения высоты полета ЛА - mY;
- коэффициента масштаба бокового отклонения ЛА - mZ;
- коэффициента масштаба скорости полета ЛА - mV;
- текущее значение высоты полета вертолета - Vтек;
- программно-заданная высота полета вертолета на исполнение команды «убрать шасси»/«выпустить шасси» - Ншас;
- проекция вектора текущей вертикальной скорости полета вертолета на вертикальную ось земной системы координат - Vygтек;
- координаты (Ye(m)) и (Ze(m)) частиц «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1.
Работа командно-пилотажного индикатора начинается с того, что летчик при подготовке к полету, устанавливает переключатель ввода исходных данных параметров программной трехмерной траектории полета вертолета (В) 34 (фиг. 1) в положение «ввод исходных данных параметров программной трехмерной траектории полета вертолета». В блок навигационного вычислителя исходных данных (НВ ИД) 13 летчик вводит параметры программной трехмерной траектории полета и моменты инерции вертолета, подготовленные к обработке в пространстве земной системы координат. После ввода исходных данных, летчик переводит переключатель ввода исходных данных параметров программной трехмерной траектории полета вертолета (В) 34 (фиг. 1) в положение, которое соответствует команде «ввод данных прекращен». По этой команде на вход блока навигационного вычислителя расчетных данных (НВ РД) 14 поступают все исходные данные параметров программной трехмерной траектории полета вертолета и моменты инерции вертолета с выхода блока навигационного вычислителя исходных данных (НВ ИД) 13. В блоке навигационного вычислителя расчетных данных (НВ РД) 14 исходные данные параметров трехмерной программной траектории полета и моменты инерции вертолета пересчитываются в дополнительно заданные параметры полета вертолета, которые необходимы для управления полетом вертолета и для работы блока системы автоматического управления полетом (САУП) 10.
На вход блока (фиг. 1) системы автоматического управления полетом (САУП) 10 постоянно поступают сигналы с выходов основных систем вертолета: блока системы воздушных сигналов (СВС) 11, блока инерциальной навигационной системы (ИНС) 12, блока навигационного вычислителя исходных данных (НВ ИД) 13, блока навигационного вычислителя расчетных данных (НВ РД) 14, блока учета расхода в полете массы полезной нагрузки вертолета (РПН) 33, блока вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значения параметра продольного расстояния от центра масс вертолета до оси несущего винта (ЦМ) 32, блока измерения параметров полета вертолета (ИПП) 42. С выхода блока системы автоматического управления полетом (САУП) 10 параметры полета поступают на вход блока командно-пилотажного индикатора (КПИ) 9 (фиг. 1, фиг. 2). В блоке командно-пилотажного индикатора (КПИ) 9 параметры полета передаются в генератор символов (ГС) 15, где преобразуются в управляющие индексы и выводятся на экран 1 в виде визуальной информации (фиг. 3), помогающей летчику контролировать полет вертолета на маршруте от точки старта «О» на участке равномерного и прямолинейного движения на постоянной высоте «АА*» в направлении района висения «ВВ*» (фиг. 4) и далее по маршруту до точки «С». Параметры полета визуализируются (фиг. 3) индексами «Лидер» 4, «Самолет» 5, «шкалой высоты» 6, «радиовысотой» 8 и навигационными приборами вертолета: указателем курса, указателем вертикальной скорости полета вертолета и другими. К району висения «ВВ*» вертолет движется в соответствии с программой полета, которая содержит участки маршрута равномерного и прямолинейного движения «АА*» с постоянной скоростью на постоянной высоте (фиг. 4). В районе висения «ВВ*», в соответствии с программой полета, величина вектора скорости полета вертолета изменяется до значения близкого к нулю. Визуальный контроль параметров полета вертолета для летчика в условии равномерного и прямолинейного движения на постоянной высоте осуществляется по индексам на индикационном поле 3 экрана 1: «Лидер» 4, «Самолет» 5, «радиовысота» 8 и навигационным приборам, представленным на навигационном поле 2 экрана 1 (фиг. 3). Однако, в случае, когда стрелки навигационных приборов или подвижные шкалы индикации «застыли» в одном положении, то их возможное малое отклонение иллюзорно «застывшее» около цифровых значений шкал навигационных приборов, не позволяет летчику своевременно заметить накапливание пилотажной ошибки и выполнить управляющие действие органами управления вертолетом. Даже видимое статическое незначительное отклонение стрелки не привлекает внимание летчика, хотя со временем и приводит к значительным изменениям параметров полета. Иллюзия «застывших» стрелок объясняется точностью измерения навигационными приборами малого изменения (в окрестности зоны нечувствительности) измеряемой величины параметра полета (фиг. 5). На фигуре 5 изображен условно навигационный прибор вертикальной скорости полета вертолета. На фигуре 6 показана зона нечувствительности прибора, в пределах которой изменение вертикальной скорости полета вертолета управляемого летчиком не фиксируется показанием стрелки на шкале навигационного прибора из-за зоны нечувствительности навигационного прибора. Графическое представление навигационного прибора вертолета в режиме равномерного и прямолинейного движения или режима висения измеряющего параметры полета в окрестности зоны нечувствительности представлены на (фиг. 5), где изображена стрелка навигационного прибора измеряющего параметр полета вертолета в пределах зоны нечувствительности навигационного прибора. На фигуре 6 показано графическое представление реализации зоны нечувствительности навигационного прибора в блоке траекторного вычисления (ТВ) 29. На фигуре 6 видно, что происходит изменение навигационного параметра, но в приборе, воспроизводящем изменение навигационного параметра (фиг. 5) стрелка 'застыла'. Объяснить изменение пространственного и углового положения вертолета, не фиксируемое навигационными приборами под действием управляющих внешних сил, можно явлением недостаточно точной балансировкой органов управления, обусловленной их холостым ходом (люфт). В режиме равномерного и прямолинейного полета на постоянной высоте, под действием вектора постоянно действующей силы происходит изменение углового положения вертолета малозаметное для глаза летчика. Действующая сила, которая не фиксируется навигационными приборами, при малозаметном отклонении стрелки навигационного прибора (вариометр, высотомер) не сразу отмечается летчиком, но при длительном воздействии на массу вертолета, приводит ее в движение. В таких случаях летчик через какое-то время отмечает уже значительные изменения текущих параметров полета (например: текущего значения высоты полета вертолета или текущего значения бокового отклонения вертолета) от программно-заданных параметров полета.
Движущаяся тяжелая масса вертолета и заметное изменение ее углового положения заставляют летчика принять управляющие действия органами управления, чтобы вернуть вертолет в заданные параметры полета. Летчик изменяет положение органов управления (ОУ) 24 вертолета и ожидает реакцию управляющих сил действующих на вертолет, изменяющих угловое и пространственное положение вертолета. Процесс действия органами управления, затем - взгляд на прибор угла тангажа, взгляд на прибор угла крена, взгляд на другие навигационные приборы и удержание вертолета в ближайших координатах заданной точки траектории полета, повторяется многократно и требует от летчика большого мастерства и психофизиологического напряжения. Это становится опасным при ручном пилотировании по приборам в сложных метеоусловиях. Реакция вертолета на управляющее действие органов управления зависит от величины действующей силы и силы сопротивления, динамических характеристик вертолета: угла наклона плоскости вращения несущего винта, массы вертолета, положения центра масс вертолета и величины центральных и центробежных моментов инерции. Не отмеченное навигационными приборами и не замеченное летчиком пространственное перемещение вертолета особенно опасно при полете и висении в условиях плохой видимости, в ночных полетах и полетах над морем. Для того, чтобы дать летчику возможность сконцентрироваться на выполнении поставленной задачи, чтобы улучшить контроль полета по навигационным приборам вертолета, а также уменьшить воздействие на летчика психофизиологического и нервного напряжения и не отвлекать его внимание на удержание вертолета в ближайших координатах заданной точки полета, в блоке траекторного вычислителя (ТВ) 29 (фиг. 1) решается система дифференциальных уравнений пространственного движения виртуального вертолета. Математическая модель виртуального вертолета описывается системой дифференциальных уравнений пространственного движения и представляет описание точной копии линейных размеров вертолета управляемого летчиком и точной функциональной зависимостью значений внешних сил и положением органов управления вертолетом (ОУ) 24. Математическая модель виртуального вертолета отличается от математической модели вертолета управляемого летчиком тем, что масса виртуального вертолета (Ма) меньше текущей массы вертолета управляемого летчиком (Мв), то есть (Ма<Мв). В соответствии с уменьшением массы (Ма) в математической модели виртуального вертолета пересчитываются все значения моментов инерции виртуального вертолета: Уменьшенная масса и моменты инерции математической модели виртуального вертолета (при одном и том же действии управляющих сил), предполагают значительно большее изменение числового значения параметров пространственного и углового положение виртуального вертолета, по сравнению с числовым значением параметра пространственного и углового положения вертолета управляемого летчиком. То есть, вертолет управляемый летчиком изменит свое пространственное и угловое положение настолько незначительно, что летчик его даже не заметит. В то же время, математическая модель виртуального вертолета (со скоростью бортового компьютера, расположенного в блоке траекторного вычислителя (ТВ) 29) вычислит прогнозируемые параметры пространственного и углового положения виртуального вертолета, которые будет соответствовать вектору перемещения пространственного и углового положения вертолета управляемого летчиком. Для этого разности между вычисленными прогнозируемыми значениями параметров полета виртуального вертолета (Ya, Za) и программно-заданными значениями параметров полета вертолета (Yзад, Zзад) управляемого летчиком, dAy=(Ya-Yзад) и dAz=(Za-Zзад) (вдоль оси (oYg) и вдоль оси (oZg) земной системы координат соответственно) передаются с выхода блока траекторного вычислителя (ТВ) 29 на вход блока системы автоматического управления полетом вертолета (САУП) 10, а затем с выхода блока системы автоматического управления полетом (САУП) 10 эти параметры полета вертолета поступают на вход блока командно-пилотажного индикатора (КПИ) 9, в котором возможностями генератора символов (ГС) 15 визуализируются в виде индекса "Самолет", индекса "Лидер", индекса "радиовысота", неподвижной неравномерной шкалы значения высоты полета, прибора вертикальной скорости полета вертолета, других навигационных приборов и подвижного изображения частиц «Фона» фрагментов неподвижной воздушной атмосферы на индикационном поле 3 экрана 1 (фиг. 3).
Подвижное изображение частиц «Фона» фрагмента неподвижной воздушной атмосферы на индикационном поле 3 экране 1 является компьютерной реализацией движения изображения частиц «Фона» фрагментов неподвижной воздушной атмосферы - аналога земной атмосферы (фиг. 7) и является в заявляемом командно-пилотажном индикаторе дополнительной возможностью в реализации безопасности полета вертолета управляемого летчиком. На фигуре 7 представлены частицы «Фона» неподвижной воздушной атмосферы в земной системе координат oXgYgZg, частицы «Фона» фрагмента неподвижной воздушной атмосферы и визуализация частиц «Фона» фрагмента на индикационном поле 3 экрана 1 (КПИ) 9. Множество вычисляемых фрагментов неподвижной воздушной атмосферы, которые при визуализации сменяются на экране КПИ (при расчете динамики пространственного и углового положения виртуального вертолета), создают иллюзию реального движения вертолета в воздушном пространстве. Последующее смещение изображения частиц «Фона» фрагмента на индикационном поле 3 экрана 1 (КПИ) 9, относительно предыдущего изображения частиц «Фона» фрагмента определяется разностью между вычисленными прогнозируемыми значениями параметров полета виртуального вертолета (Ya, Za) и программно-заданными значениями параметров полета вертолета (Yзад, Zзад) управляемого летчиком, (dAy=(Ya-Vзад) и dAz=(Za-Zзад)) (вдоль оси (oYg) и вдоль оси (oZg) земной системы координат соответственно). Связанная система координат oX1Y1Z1 вертолета в полете ориентирована относительно земной системы координат углами крена, тангажа, рыскания. Следовательно, летчику на экране командно-пилотажного индикатора подвижное изображение частиц «Фона» (далее - частицы «Фона») будет проецироваться по значениям тех же углов крена, тангажа и рыскания (фиг. 7), создавая летчику иллюзию визуального полета его вертолета в реальной воздушной атмосфере. Алгоритм, реализующий движущееся изображение частиц «Фона» на индикационном поле 3 экрана 1 командно-пилотажного индикатора (КПИ) 9, представлен блок-схемой на фигуре 8 (начало блок-схемы) и фигуре 9 (продолжение блок-схемы фигуры 8) и будет рассмотрена отдельно ниже по тексту. Beличины навигационных параметров полета виртуального вертолета вычисляются в блоке траекторного вычислителя (ТВ) 29 интегрированием (для заданного интервала времени ΔT) математической модели динамики пространственного движения виртуального вертолета, описываемой системой дифференциальных уравнений (фиг. 10), решением которой являются прогнозируемые числовые значения параметров траектории полета за время (ΔT):
- координаты центра масс текущей точки траектории полета виртуального вертолета (Ха, Ya, Za);
- вычисленные в земной системе координат значения проекции вектора текущей скорости полета виртуального вертолета - (Vxa,Vya,Vza);
- проекции вектора угловой скорости виртуального вертолета на оси связанной с виртуальным вертолетом системы координат - (ωxa, ωya, ωza);
- текущее угловое положение виртуального вертолета (υ°а, ϕ°а, γ°а) угол тангажа, рыскания и крена, соответственно.
Диапазон времени (Δt) блока системы автоматического управления полетом (САУП) 10, включающий время обработки входного контроля навигационной информации, время интегрирования системы дифференциальных уравнений пространственного движения виртуального вертолета, время формирования протоколов обмена, время рассылки протоколов обмена и другие временные рабочие процессы, которые в данном предложении не рассматриваются, но, выполнение которых обязательно. Этот необходимый диапазон времени (Δt) при работе блока системы автоматического управления полетом (САУП) 10 обозначен фигурной скобкой со значениями t(n-1), t(n), t(n+1) на трехмерном графике (фиг. 10) вдоль оси времени (tсек). На фигуре 10 условно показано, что в системе автоматического управления полетом (САУП) 10, имеется навигационная информация о текущем значении высоты полета вертолета (Yтек), которой управляет летчик, и программно-заданная высота полета на маршруте (Yзад), необходимая для выполнения поставленной задачи в режиме автоматического управления полетом. Протоколы обмена, содержащие значение текущей высоты полета вертолета (Yтек) и программно-заданную высоту полета на маршруте (Yзад), формируются за время (Δt) и передаются в t(n-1) секунду, в t(n) секунду, t(n+1) секунду и так далее при работе блока системы автоматического управления полетом (САУП) 10. На фигуре 10 вдоль оси ординат (oYg) графически представлено изменение значения текущей высоты полета вертолета (Yтек), программно-заданной высоты полета на маршруте (Yзад) и область зоны нечувствительности навигационного прибора (±ΔYg). В блоке системы автоматического управления полетом (САУП) 10 через диапазон времени (Δt) для переданных начальных условий параметров полета в блоке траекторного вычислителя (ТВ) 29 за период времени интегрирования (ΔT) вычисляются прогнозируемые параметры полета виртуального вертолета. Как пример, для заявляемого предложения, рассмотрим изменение (Ya) прогнозируемой высоты полета виртуального вертолета при известной (Yзад) программно-заданной высоте полета на маршруте. На фигуре 10 представлено для момента времени (t(n-1) секунды) и для момента времени (t(n) секунды), графическое решение зависимости прогнозируемой высоты полета виртуального вертолета за период времени (ΔT) вдоль оси абсцисс - (Т,сек) и оси ординат (oYg), Решение показывает - прогнозируемая высота полета виртуального вертолета (координата центра масс текущей точки траектории полета виртуального вертолета - Ya) больше программно-заданной высоты полета на маршруте (Ya>Yзад). В момент времени (t(n+1) секунды) прогнозируемая высота полета виртуального вертолета меньше программно-заданной высоты полета на маршруте (Ya<Yзад). Вычисленное в блоке траекторного вычислителя (ТВ) 29 численное значение прогнозируемой величины высоты полета вертолета (Ya) сравнивается с программно-заданным значением высоты полета на маршруте (Yзад). Аналогично (не показано на графике) сравнивается численное значение прогнозируемой величины бокового отклонения вертолета (Za), с программно-заданным значением бокового отклонения (Zзад).
Разности между вычисленными (координатами центра масс текущей точки траектории полета виртуального вертолета - Ya, Za) или что тоже самое - прогнозируемыми значениями параметров полета виртуального вертолета (Ya, Za) и программно-заданными значениями параметров полета вертолета (Yзад, Zзад) управляемого летчиком, (dAy=(Ya-Yзад) и dAz=(Za-Zзад)) (вдоль оси (oYg) и вдоль оси (oZg) земной системы координат соответственно), поступившие в блок командно-пилотажного индикатора (КПИ) 9 с выхода блока системы автоматического управления полетом (САУП) 10 пересылаются в блок пересчета координат частиц «Фона» фрагмента неподвижной воздушной атмосферы в координаты индикационного поля 3 экрана 1 (КФ) 39 (фиг. 1, фиг. 2), в котором (в соответствии с алгоритмом представленном на фигуре 8 и фигуре 9) пересчитываются в координаты (Ye(m)) и (Ze(m)) частиц «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1, которые затем передаются в блок, индицирующий частицы «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1 (ИФ) 40. Генератор символов (ГС) 15 визуализирует частицы «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1 КПИ.
Вариант работы блока пересчета координат частиц «Фона» фрагмента неподвижной воздушной атмосферы в координаты индикационного поля 3 экрана 1 (КФ) 39 рассмотрим для случая, когда на навигационном приборе вертикальной скорости полета вертолета отмечен «ноль» и стрелка прибора находится в зоне нечувствительности. Если расчеты в блоке траекторного вычислителя (ТВ) 29 соответствуют положительному направлению прогнозируемого параметра высоты полета вертолета, то есть (dAy>0.0) больше нуля, то это значит, что изображения частиц «Фона» (фиг. 7) фрагментов проецируемых на индикационное поле 3 экрана 1 (КПИ) 9, будут двигаться вверх. Летчик будет воспринимать это как, иллюзию уменьшения высоты полета управляемого им вертолета. Летчик органами управления полетом вертолета (ОУ) 24 будет увеличивать подъемную силу несущих винтов, тем самым увеличивая высоту полета и наблюдая на навигационном поле 3 экрана 1 уменьшение (до полной остановки) скорости движения вверх изображения частиц «Фона» фрагментов проецируемых на индикационное поле 3 экрана 1. При значении разности (dAy=0.0) равной нулю, изображения частиц «Фона» фрагментов проецируемых на индикационное поле 3 экрана 1 не будут двигаться по навигационному полю 3 экрана 1 (КПИ) 9, что будет означать, что вертолет занял программно-заданную высоту полета на маршруте (Yтек=Yзад). Если значение параметра (dAy<0.0) dAy меньше нуля, то летчик видит движение частиц «Фона» фрагментов (фиг. 7), проецируемых на индикационное поле 3 экрана 1 (КПИ) 9, по направлению вниз, и воспринимает это движение, как иллюзию движения управляемого им вертолета, по направлению вверх. Летчик органами управления полетом вертолета (ОУ) 24 уменьшает подъемную силу несущих винтов, тем самым уменьшает высоту полета и наблюдает на навигационном поле 3 экрана 1 уменьшение (до полной остановки) скорости движения вверх изображения частиц «Фона» фрагментов проецируемых на индикационное поле 3 экрана 1, до тех пор, пока параметр dAy станет равным нулю (dAy=0).
Аналогичное управление полетом вертолета летчик осуществляет при отклонениях вертолета в боковом направлении. Если расчеты в блоке траекторного вычислителя (ТВ) 29 покажут положительное направление движения прогнозируемого параметра бокового отклонения вертолета, то есть (dAz>0.0) dAz больше нуля, то это значит, что изображения частиц «Фона» (фиг. 7) фрагментов проецируемых на индикационное поле 3 экрана 1 (КПИ) 9, будут двигаться в правую сторону, иллюзорно воспринимаясь летчиком, как движение в левую сторону его вертолета. Летчик органами управления полетом вертолета (ОУ) 24 будет увеличивать боковую составляющую силы несущих винтов, направленную в правую сторону, наблюдая на навигационном поле 3 экрана 1 уменьшение (до полной остановки) скорости движения в правую сторону изображения частиц «Фона» фрагментов проецируемых на индикационное поле 3 экрана 1. При значении разности (dAz=0.0) dAz равной нулю, изображения частиц «Фона» фрагментов проецируемых на индикационное поле 3 экрана 1 не будут двигаться по навигационному полю 3 экрана 1 (КПИ) 9, что будет означать, что вертолет занял программно-заданное боковое отклонение (Zтек=Zзад). Если направление прогнозируемого параметра бокового отклонения вертолета (dAz<0.0) dAz меньше нуля, то летчик видит движение изображения частиц «Фона» фрагментов (фиг. 7), проецируемых на индикационное поле 3 экрана 1 (КПИ) 9, по направлению в левую сторону, и воспринимает это движение, как иллюзию движения вертолета, по направлению в правую сторону. Летчик органами управления полетом вертолета (ОУ) 24 будет увеличивать боковую составляющую силы несущих винтов, направленную в левую сторону, наблюдая на навигационном поле 3 экрана 1 уменьшение (до полной остановки) скорости движения в левую сторону изображения частиц «Фона» фрагментов проецируемых на индикационное поле 3 экрана 1.
В равномерном и прямолинейном движении на постоянной высоте или в режиме висения, летчик наблюдает на индикационном поле 3 экрана 1 (КПИ) 9 текущее положение индекса «Самолет» 5, индекса «Лидер» 4, шкалу значения высоты полета 6 вертолета, индекс «радиовысоты» 8 и неподвижное изображение частиц «Фона проецируемых на индикационное поле 3 экрана 1. Таким образом, в заявляемом командно-пилотажном индикаторе навигационное поле 2 экрана 1 используется для визуализации навигационных приборов реального углового и пространственного положения вертолета управляемого летчиком, а индикационное поле 3 экрана 1 дополнительно используется для визуализации изображения частиц «Фона» фрагментов неподвижной воздушной атмосферы в координаты индикационного поля. Что является дополнительным средством управления полетом с минимальными пространственными отклонениями вертолета в программно-заданной точке траектории, так как показывает летчику направление прогнозируемых малых перемещений управляемого им вертолета и не препятствует летчику наблюдать управляющие индексы «Самолет» 5, «Лидер» 4, высоты полета 8 и другие навигационные приборы.
В блоке начальных условий траекторного вычислителя (НУ ТВ) 30 уменьшение массы (Ма) виртуального вертолета связано с пересчетом моментов инерции (пропорционально изменению плотности) материала, из которого изготовлена конструкция вертолета управляемого летчиком. Имеющиеся на борту вертолета (управляемого летчиком) элементы конструкции: оборудование кабины вместе с экипажем, навигационное оборудование, вооружение, конструкции шасси, двигатель с несущей системой, топливные баки с заправкой и другие необходимые элементы, обеспечивающие полет вертолета, также пересчитываются на новое значение массы и моментов инерции, причем, важно, чтобы координаты центра масс в конструкции вертолета управляемого летчиком совпадали с координатами центра масс в конструкции виртуального вертолета. Затем происходит сложение пересчитанных масс элементов конструкции виртуального вертолета. Расчеты будут верны, если координаты центра масс виртуального вертолета совпадут с координатами центра масс вертолета управляемого летчиком. Далее суммируются инерционные характеристики виртуального вертолета и в итоге угловая ориентация главных центральных моментов инерции виртуального вертолета должна совпадать с угловой ориентацией главных центральных моментов инерции вертолета, управляемого летчиком. Сформированный протокол обмена: Тнв, Хтек,Vтек,Zтек, Хзад,Yзад,Zзад, Vxgтек,Vygтек,Vzgтек, ωxтек,ωутек,ωzтек, υ°тек,ϕ°тек,γ°тек, Ψ°тек, Θ°тек, Wind=f(Wxg, Wzg), Ма, ха, ya, za, Ixxa,Iyya,Izza,Ixya,Ixza,Iyza передается в блок траекторного вычислителя (ТВ) 29 для каждого цикла обмена, как начальное условие интегрирования системы дифференциальных уравнений динамики пространственного движения виртуального вертолета.
Пример пересчета инерционно-массовых характеристик представлен на фигуре 11 графиками параметров инерционно-массовых характеристик модели вертолета управляемого летчиком, а на фигуре 12 представлен графиками параметров инерционно-массовых характеристик модели виртуального вертолета. На фигуре 11 и фигуре 12 графики №1÷№5 содержат изменяющиеся по времени одноименные функциональные зависимости.
На графиках №1 представлена зависимость изменения массы вертолета, как функции времени. M=F(t). Масса вертолета управляемого летчиком (фигура 11) от начального значения M(t=0=1055 и масса виртуального вертолета уменьшенная в два раза от начального значения M(t=0)=527.5 (фигура 12), к моменту времени (t=50) изменяются пропорционально, в соответствии с массовым расходом топлива: для вертолета управляемого летчиком, M(t=50)=565 и для виртуального вертолета M(t=0)=282.5.
На графиках №2 представлена зависимость изменения центра масс вертолета в полете с учетом расхода топлива Xo=F(t), Yo=F(t). Отмечаем, что для вертолета управляемого летчиком и виртуального вертолетов имеем равные значения координат центра масс в полете по времени. В момент времени (t=0) координаты центра масс вертолета управляемого летчиком (фигура 11) и виртуального (фигура 12) вертолета равны Xo(t=0)=0.6185 и Yo(t=0)=-0.1896, а в момент времени (t=50) координаты центра масс вертолета управляемого летчиком (фигура 11) и виртуального (фигура 12) вертолета равны Xo(t=50)=0.2876 и Yo(t=50)=-0.354.
На графиках №3 представлена зависимость изменения углового положения центральных осей инерции относительно связанных осей oX1Y1 вертолета, управляемого летчиком и виртуального вертолета в функции от времени. S=F(t). Отмечаем, что для вертолета, управляемого летчиком, (фигура 11) и виртуального (фигура 12) вертолета имеем равные значения изменения углового положения центральных осей инерции относительно связанных осей oX1Y1 в полете. В момент времени (t=0) угловое положение центральных осей инерции относительно связанных осей oX1Y1 S(t=0)=87.63°, а в момент времени (t=50) S(t=50)=81.35°.
На графиках №4 представлена зависимость величин центральных моментов инерции вертолета в функции от времени Ixx=F(t), Iyy=F(t). В момент времени (t=0) центральные моменты инерции вертолета управляемого летчиком (фигура 11) Ixx(t=0)=333.1 и Iyy(t=0)=-1906, а в момент времени (t=50) центральные моменты инерции Ixx(t=50)=202.2 и Iyy(t=50)=1675. В момент времени (t=0) центральные моменты инерции виртуального (фигура 12) вертолета Ixx(t=0)=166.5 и Iyy(t=0)=-953.1, а в момент времени (t=50) центральные моменты инерции Ixx(t=50)=101.1 и Iyy(t=50)=837.5. Отмечаем, что центральные моменты инерции вертолета управляемого летчиком (фигура 11) по величине в два раза больше центральных моментов инерции виртуального (фигура 12) вертолета, что соответствует условию уменьшению массы виртуального вертолета в два раза.
На графиках №5 представлена зависимость изменения центробежного момента инерции вертолета в функции от времени Ixy=F(t). В момент времени (t=0) центробежный момент инерции вертолета управляемого летчиком (фигура 11) Ixy(t=0)=-65.3, а в момент времени (t=50) центробежный момент инерции Ixy(t=50)=-229.5. В момент времени (t=0) центробежный момент инерции виртуального (фигура 12) вертолета Ixy(t=0)=-32.65, а в момент времени (t=50) центробежный момент инерции Ixy(t=50)=-114.7. Отмечаем, что центробежный момент инерции вертолета управляемого летчиком (фигура 11) по величине в два раза больше центробежного момента инерции виртуального (фигура 12) вертолета, что соответствует условию уменьшения массы виртуального вертолета в два раза и соблюдению равенства линейных размеров вертолета управляемого летчиком и виртуального вертолета. Анализ графиков (фигура 11 и фигура 12) доказывает, что пропорционально уменьшенные в блоке начальных условий траекторного вычислителя (НУ ТВ) 30 инерционно-массовые параметры виртуального вертолета (график №1) будут также пропорционально изменяться с изменением расходных масс (топливо, груз, боезапас). При решении задачи динамики движения виртуального вертолета в блоке траекторного вычислителя (ТВ) 29 будет учитываться положение центра масс виртуального вертолета, плечи линейных размеров приложения внешних и управляющих сил в полете, угловое положение эллипсоида инерции (график №3), определяемое величинами центральных и центробежных моментов инерции (графики №4, №5). То, что угловое положение центральных осей инерции (график №3) виртуального и вертолета, управляемого летчиком, в плоскости связанных осей oX1Y1 в функции времени S=F(t) совпадает, косвенно подтверждает правильность расчетов инерционно-массовых характеристик для параметров виртуального вертолета.
Следовательно, вычисляемые параметры начальных условий математической модели виртуального вертолета в блоке начальных условий траекторного вычислителя (НУ ТВ) 30, для вычисления прогнозируемых параметров пространственного и углового положения вертолета, управляемого летчиком, будет удовлетворять решению задачи обнаружения малых пространственных и угловых перемещений.
Алгоритм вычисления инерционно-массовых характеристик виртуального вертолета известен, поэтому не является предметом заявляемого предложения и подробно не рассматривается.
Процесс управления вертолетом, в котором используются прогнозируемые параметрам траектории полета виртуального вертолета, визуализируемые подвижными изображения частиц «Фона» фрагментов проецируемых на индикационное поле 3 экрана 1, представлен блок-схемой на фигуре 13. Прогнозируемое пространственное положение вертолета, вычисленное на некоторое время раньше в блоке траекторного вычислителя (ТВ) 29, позволяет летчику воздействовать на органы управления вертолетом до того момента, когда тяжелая масса вертолета придет в движение. Такой полет облегчает летчику управление вертолетом в сложных метеоусловиях, снижает психофизиологическую и нервную нагрузку, освобождает внимание летчика для выполнения поставленной задачи. В полете по криволинейной траектории подвижное изображение частиц «Фона» на индикационном поле 3 экрана 1 соответствует маневрам вертолета и ожиданиям летчика в правильности совершаемого им маневра в пространстве, а также вселяет в летчика чувство уверенности близкое к визуальному полету, снижая психофизиологическую нагрузку.
На фигуре 13 изображена схема подключения блока траекторного вычислителя (ТВ) 29, в котором вычисляются разности между вычисленными прогнозируемыми значениями параметров полета виртуального вертолета (Ya, Za) и программно-заданными значениями параметров полета вертолета (Yзад, Zзад) управляемого летчиком, dAy=(Ya-Yзад) и dАz=(Zа-Zзад) (вдоль оси (oYg) и вдоль оси (oZg) земной системы координат соответственно). Эти параметры передаются с выхода блока траекторного вычислителя (ТВ) 29 на вход блока системы автоматического управления полетом вертолета (САУП) 10, с выхода которого параметры (dAy, dAz) поступают на вход блока командно-пилотажного индикатора (КПИ) 9 и передаются на вход блока пересчета координат частиц «Фона» фрагмента неподвижной воздушной атмосферы в координаты индикационного поля 3 экрана 1 (КФ) 39, в котором они алгоритмически пересчитываются в координаты (Ye(m)) и (Ze(m)) частиц «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1 и поступают на вход блока, индицирующего частицы «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1 (ИФ) 40. Не отмеченное навигационными приборами блока системы автоматического управления полетом (САУП) 10 и не замеченное летчиком пространственное перемещение (Yтек) и (Zтек) его вертолета, летчик видит в виде подвижного графического изображения частиц «Фона» фрагмента на индикационном поле 3 экрана 1 в виде иллюзии пространственного движения его вертолета. Действуя органами управления вертолетом (ОУ) 24, летчик возвращает вертолет в пространственное положение программно-заданных координат равномерного и прямолинейного движения. После визуализации подвижного графического изображения частиц «Фона» фрагментов проецируемых на индикационном поле 3 экрана 1 командно-пилотажного индикатора (КПИ) 9 цикл вычисления подвижного графического изображения частиц «Фона» фрагментов проецируемых на индикационное поле 3 экрана 1 повторяется.
Визуализация частиц «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1 командно-пилотажного индикатора (КПИ) 9 возможна благодаря блоку пересчета координат частиц «Фона» фрагмента неподвижной воздушной атмосферы в координаты индикационного поля 3 экрана 1 (КФ) 39, который (фиг. 8, фиг. 9) представлен блок-схемой, состоящей из процедур алгоритмического языка программирования для пересчета координат частиц «Фона» в фрагмент неподвижной воздушной атмосферы:
- «S_00» - процедура начальных данных, в которой определены рабочие переменные блока пересчета координат частиц «Фона» фрагмента неподвижной воздушной атмосферы в координаты индикационного поля 3 экрана 1 (КФ) шаг клетки dR - постоянное расстояние между отдельными частицами «Фона» - dR=const; постоянный линейный размер LS индикационного поля 3 экрана 1 (КПИ) 9 - LS=const; минимальное значение линейного размера экрана вдоль оси Z экрана Zgo=-LS/2; максимальное значение линейного размера экрана вдоль оси Z экрана Zgк=LS/2; минимальное значение линейного размера экрана вдоль оси Y экрана Ygo=-LS/2; максимальное значение линейного размера экрана вдоль оси Y экрана Ygк=LS/2, переименовываются идентификаторы минимальных значений линейных размеров экрана вдоль оси Z экрана - Zoo=Zgo и вдоль оси Y экрана - Yoo=Ygo и в счетчике циклов обнуляется переменная циклов k=0. Процедура «S_00» выполняется один раз перед первым обращением к блоку пересчета координат частиц «Фона» фрагмента неподвижной воздушной атмосферы в координаты индикационного поля 3 экрана 1 (КФ) 39. По линейным размерам индикационного поля 3 экрана 1 определяется центр индикационного поля 3 экрана 1, относительно которого рассчитывается смещение фрагментов неподвижной воздушной атмосферы частиц «Фона». В этом же центре изображается управляемый летчиком индекс «Самолет» 5.
- «S_01» - процедура численного анализа разности между вычисленными прогнозируемыми значениями параметров полета виртуального вертолета (Ya, Za) и программно-заданными значениями параметров полета вертолета (Yзад, Zзад) управляемого летчиком, dAy=(Ya-Yзад) и dAz=(Za-Zзад) (вдоль оси (oYg) и вдоль оси (oZg) земной системы координат соответственно). Параметры dAy и dAz принимаются на обработку, если значения параметров (dAy и dAz) большие, чем шаг клетки (расстояние между отдельными частицами «Фона» - dR=const, dAy>dR, dAz>dR), иначе будет искажен физический смысл перемещения подвижных графических фрагментов изображения частиц «Фона» в земной системе координат oXgYgZg при визуализации на индикационном поле 3 экрана 1 командно-пилотажного индикатора (КПИ) 9, поэтому алгоритмическими процедурами параметры (dAy и dAz) переименовываются в параметры (dY и dZ) соответственно.
- «S_02» - процедура вычисления минимального и максимального значения координат частиц «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1 вдоль горизонтальной оси (Zoo, Zkk) и вдоль вертикальной оси (Yoo, Ykk) относительно центра индикационного поля 3 экрана 1 (КПИ) 9.
- «S_03» - процедура, в которой в зависимости от знака параметра (dZ) при заданной величине абсолютного значения разности (Zoo и Zgo) то есть (abs(Zoo-Zgo) больше или равно 0.9999) логически вызываются процедуры блока «S_04, S_05, S_06».
- «S_04, S_05, S_06» - процедуры вычисления минимального и максимального значения положения координаты частиц «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1 вдоль вертикальной оси (Yоо, Ykk) индикационного поля 3 экрана 1 (КПИ) 9 и рабочее состояние счетчика - (k). В процедурах «S_03, S_04, S_05, S_06» рабочее состояние счетчика (k) меняется в зависимости от знака значений разности сравниваемых величин dY и dZ. Счетчик (k) обеспечивает вычислительный процесс плавного перемещения частиц «Фона» в координатах (Zoo, Zkk и Yoo, Ykk) заполняющих навигационное поле 3 экрана 1 командно-пилотажного индикатора (КПИ) 9.
- «S_07» - процедура вычисления координат положения каждой частицы «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1 в координатах (Zoo, Zkk и Yoo, Ykk), заполняющих навигационное поле 3 экрана 1 командно-пилотажного индикатора (КПИ) 9. Вычисление проводится с использованием функций внутреннего цикла вдоль горизонтальной оси и функций внешнего цикла вдоль вертикальной оси навигационного поля 3 экрана 1. Внутренний цикл процедуры выполняется операторами (№1, №2, №3, №4, №5, №6, №1). В операторе №1 выполняется присвоение переменной внутреннего цикла значение идентификатора минимального значения начальной величины (I=Zoo) координаты частицы «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1 вдоль горизонтальной оси Z (Zoo, Zkk) относительно центра индикационного поля 3 экрана 1. В операторе №2 - увеличивается на единицу счетчик внутреннего цикла (m) числового значения, которое соответствует порядковому номеру в числовом массиве частиц «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1 в координатах (Zoo, Zkk) вдоль горизонтальной оси навигационного поля 3 экрана 1. В операторе №3 заполняются элементы массива Rz1(m) и Rz2(m) в зависимости от значения счетчика внешнего цикла (s). Счетчик внешнего цикла (s) принимает три числовых значения - равно нулю, равно единице, равно двум (s=0; s=1; s=2). Значения счетчика (s) равного единице и равного двум (s=1; s=2) определяются во внешнем цикле процедуры. Числовое значение равное нулю (s=0) счетчик получает при выходе из внутреннего цикла при значении равного двум (s=2) в операторе №7. В операторе №4 выполняется заполнение элементов массива Ry(m), имеющего постоянное числовое значение для всего интервала значений координат частиц «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1 вдоль горизонтальной оси Z(Zoo, Zkk). В операторе №5 числовое значение координаты частицы «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1 вдоль горизонтальной оси Z(Zoo, Zkk) увеличивается на шаг клетки. В операторе №6 происходит логическое сравнение значения координаты частицы «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1 вдоль горизонтальной оси Z(Zoo, Zkk) с максимальным числовым значением шкалы вдоль горизонтальной оси (Zkk). Если увеличенное значение Zoo меньше Zkk (Zoo≤Zkk), то внутренний цикл продолжается выполнением оператора №1. Если увеличенное значение Zoo больше Zkk (Zoo>Zkk), то внутренний цикл прекращается с выходом на оператор внешнего цикла №7. Внешний цикл процедуры вычисления координат каждой частицы «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1 в интервале координат ((от Zoo до Zkk) и (от Yoo до Ykk)), заполняющих навигационное поле 3 экрана 1 командно-пилотажного индикатора (КПИ) 9, выполняется операторами, охватывающими внутренний цикл (от №7 до №10, №11). В операторе №7 выполняется проверка счетчика внешнего цикла (s). Если значение счетчика внешнего цикла s равно 2 (s=2), то происходит изменение значения счетчика внешнего цикла на новое числовое значение равное нулю (s=0). В операторе №8 вычисляемому значению координаты частицы «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1 вдоль вертикальной оси Y(Yoo, Ykk) присваивается новый уровень в клетке положения увеличенный на единицу (Yoo=Yoo+1). В операторе №9 выполняется проверка на окончание внешнего цикла. Если увеличенное числовое значение нового уровня (Yoo) вдоль вертикальной оси Y(Yoo, Ykk) больше максимального числового значения шкалы (Ykk), а именно. (Yoo больше Ykk), то происходит выход из внешнего цикла и окончание работы процедуры «S07». Если увеличенное числовое значение Yoo меньше или равно Ykk, то вычисление переходит на оператор №10. В операторе №10 выполняется присвоение (J) переменной внешнего цикла значение идентификатора минимального значения (Yoo) начальной величины (J=Yoo) координаты частицы «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1 в интервале координата вертикальной оси Y(Yoo, Ykk). В операторе №11 продолжается выполнение внешнего цикла, в котором счетчик (s) увеличивается на единицу (s=s+1) и процесс вычисления продолжается на внутреннем цикле процедуры. Вычисления массивов значений Ry(m), Rz1(m) и Rz2(m) координат каждой частицы «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1 в интервале (от Zoo до Zkk) и (от Yoo до Ykk), заполняющих навигационное поле 3 экрана 1 командно-пилотажного индикатора (КПИ) 9, заканчиваются выходом из оператора №9. С первого выхода процедуры «S_07» передаются массивы значений Rz1(m) и Rz2(m) на вход процедуры «S_08». Со второго выхода процедуры «S_07» передается массив значений Ry(m) на вход оператора №12, в котором массив Ye(m) переименовывается в массив Ry(m) (процедура алгоритмического языка - Ye(m)=Ry(m)) вертикальных значений (Ye(m)) координат частиц «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1. - «S_08» - процедура, в которой в зависимости от значения счетчика (k) выбирается один из массивов: либо Rz1(m), либо Rz2(m). При (k) равном единице (k=1), выбирается массив значений Rz1(m), при (k) равном двум (k=2) выбирается массив значений Rz2(m) и счетчику значений (k) присваивается ноль (k=0). Выбранный массив переименовывается (процедура алгоритмического языка - Ze(m) переименовывается в Rz1(m), при k равном 1 или Ze(m) переименовывается в Rz2(m), при k равном 2) в массив горизонтальных значений (Ze(m)) координат частиц «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1. Координаты (Ye(m)) и (Ze(m)) (фиг. 1, фиг. 2, фиг. 9, фиг. 13) частиц «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1 передаются в блок, индицирующий частицы «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1 (ИФ) 40. После визуализации частиц «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1 с координатами (Ye(m)) и (Ze(m)) на индикационном поле 3 экрана 1 командно-пилотажного индикатора (КПИ) 9, цикл вычисления значений следующих постоянно изменяющихся в полете координат частиц «Фона» фрагментов неподвижной воздушной атмосферы в координатах индикационного поля 3 экрана 1 повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| Командно-пилотажный индикатор вертолета | 2021 |
|
RU2778955C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2020 |
|
RU2778716C2 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2013 |
|
RU2539708C1 |
| Светотехническое оборудование взлетно-посадочной площадки корабля | 2019 |
|
RU2739849C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
| Способ интегрального отображения параметров полётной ситуации | 2019 |
|
RU2722888C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2002 |
|
RU2207514C1 |
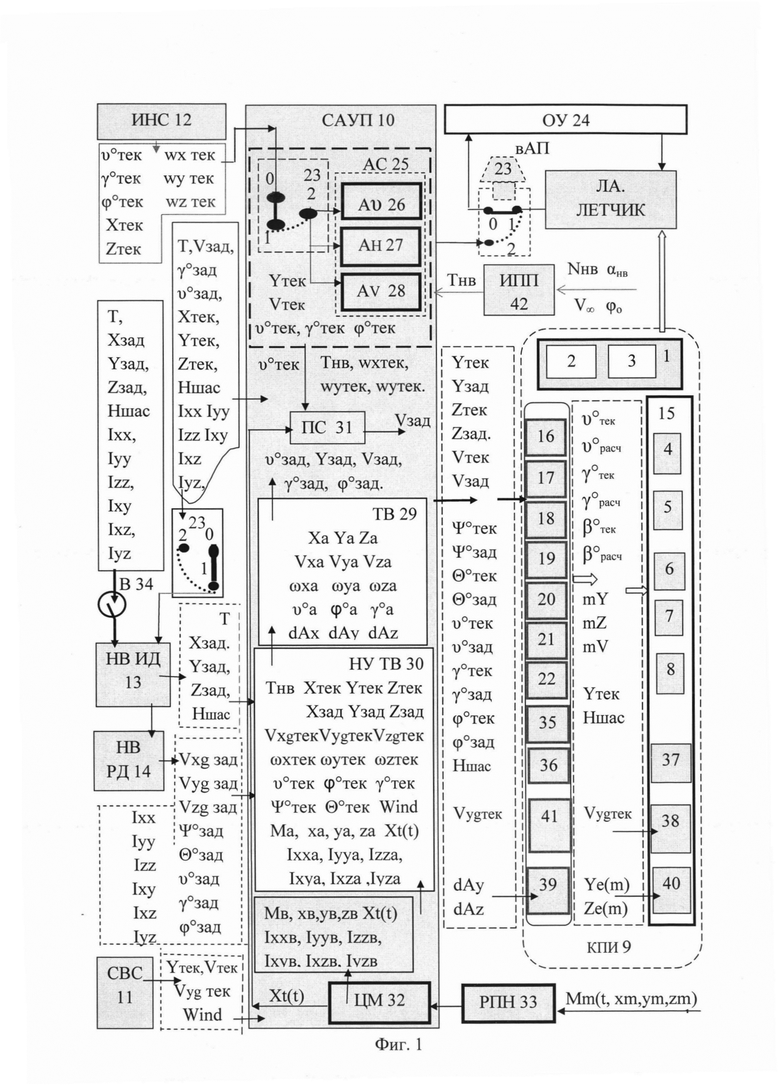

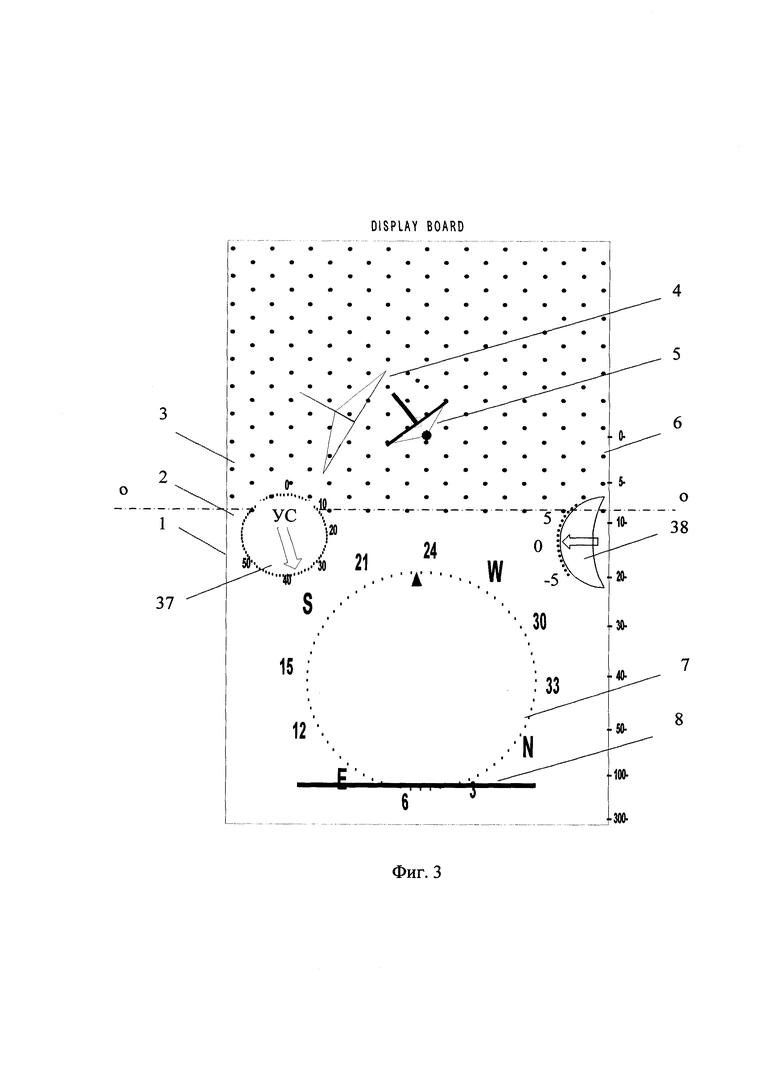

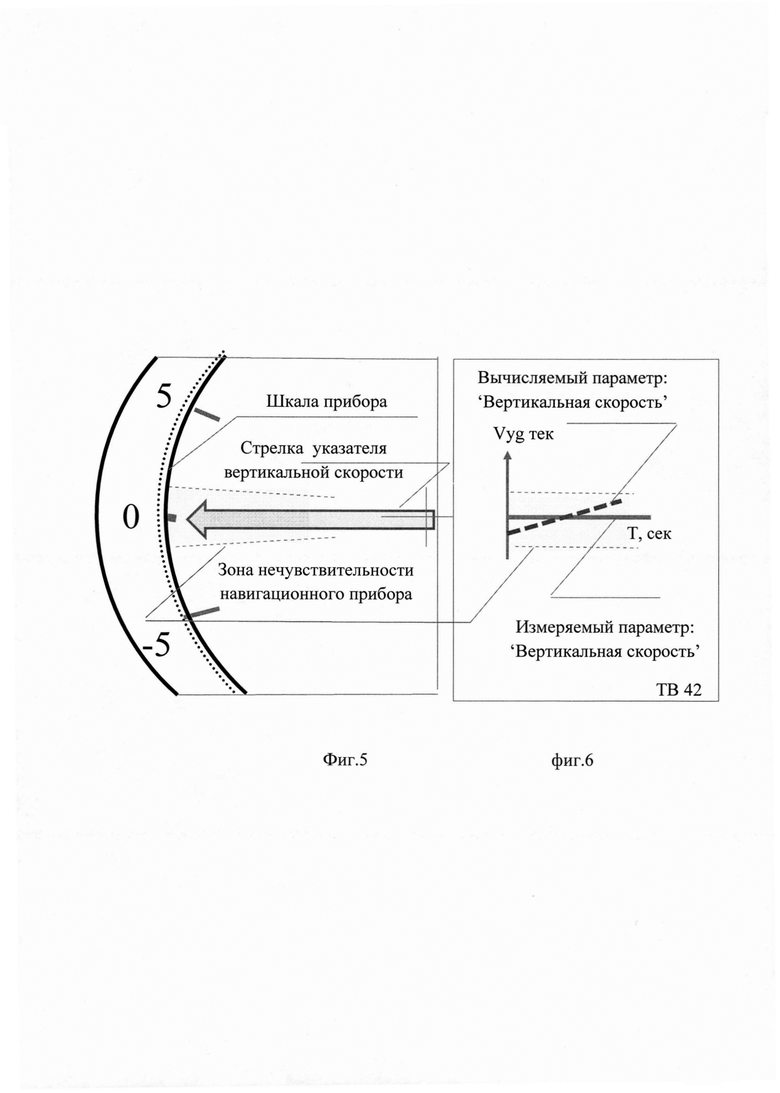
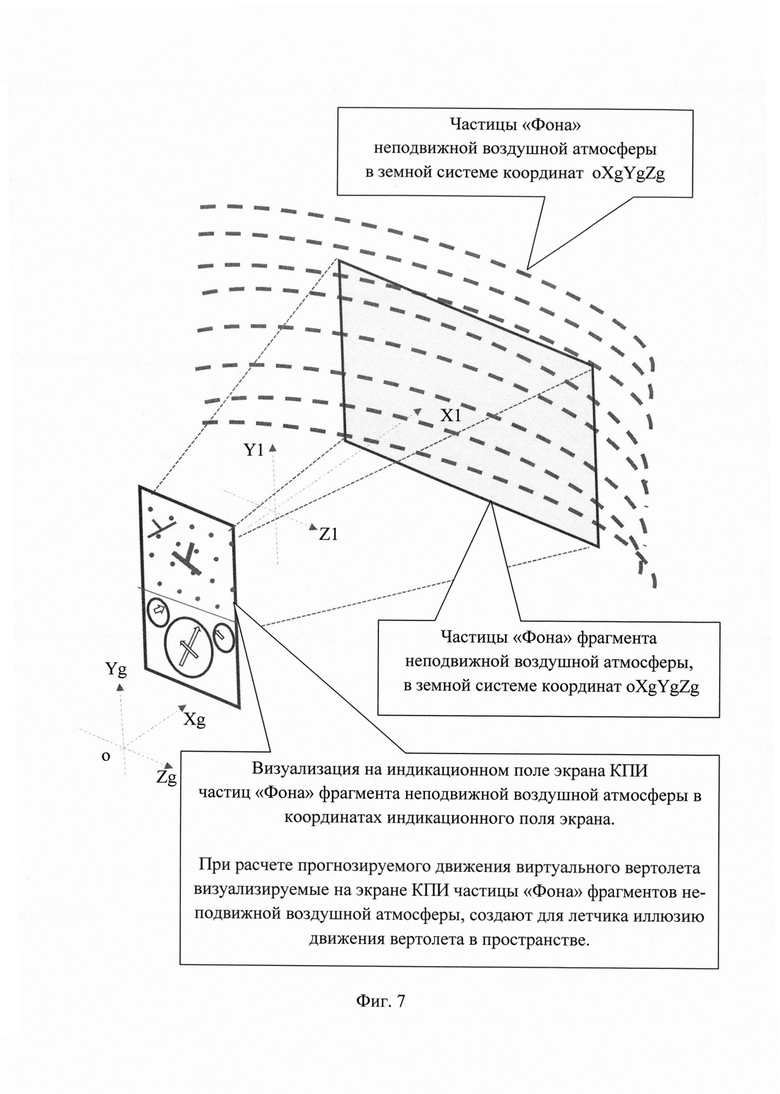
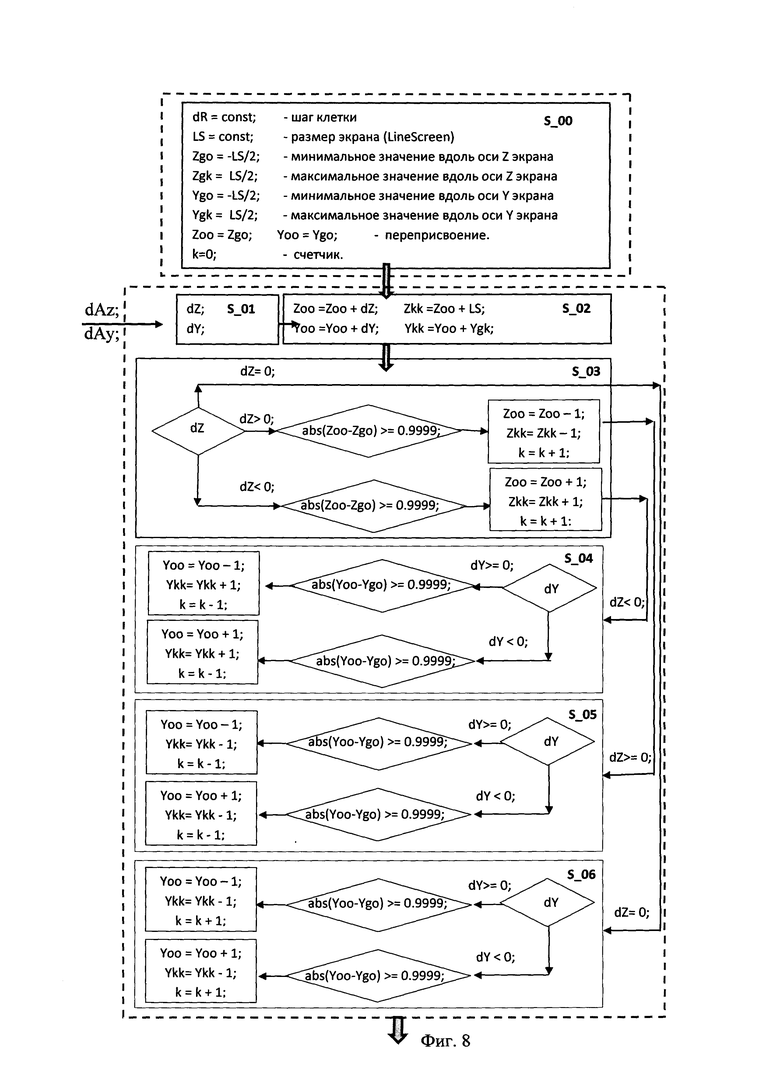

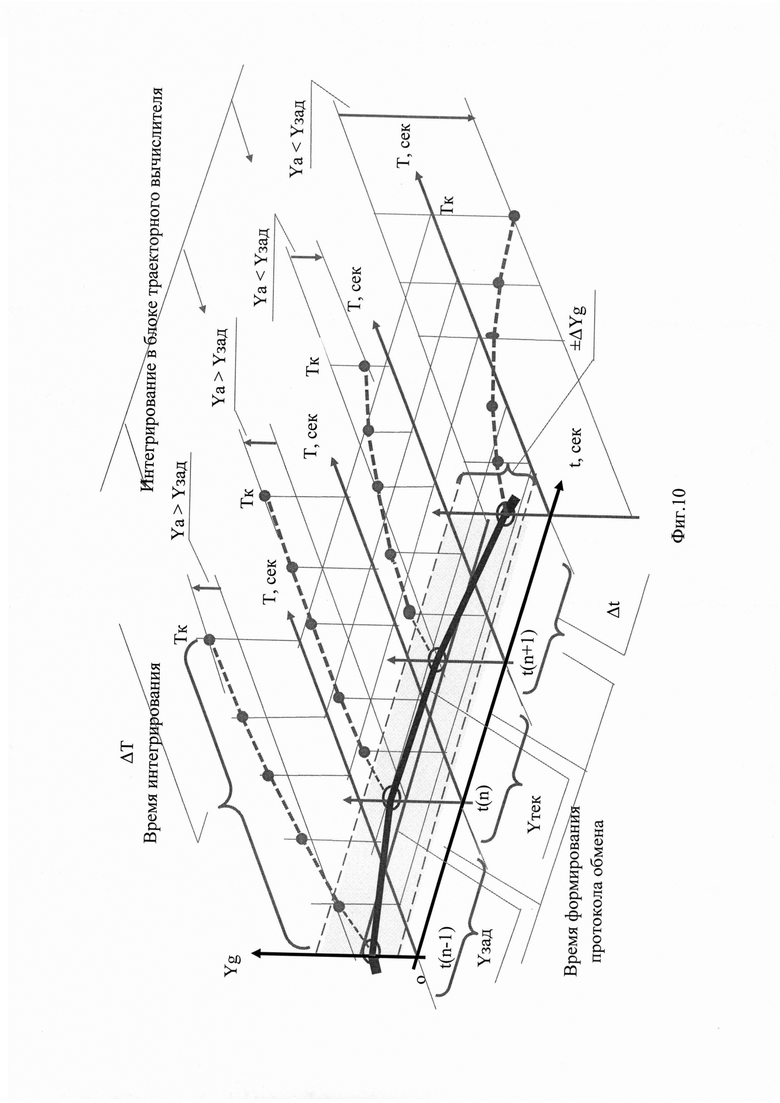
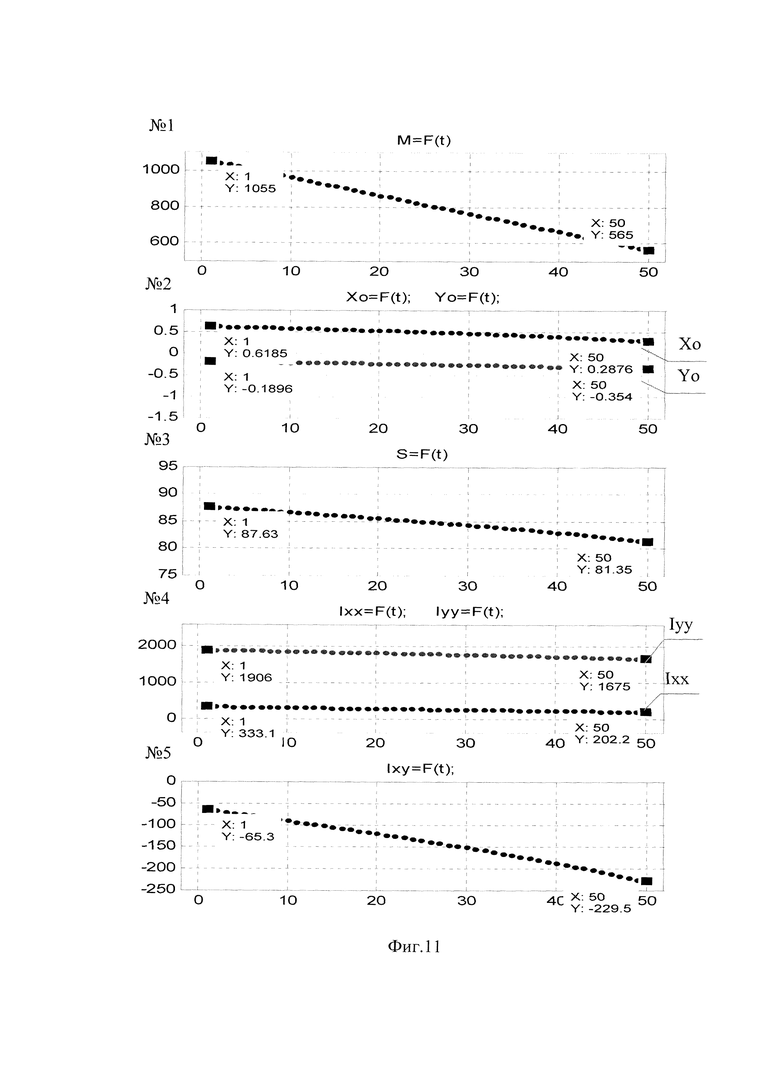
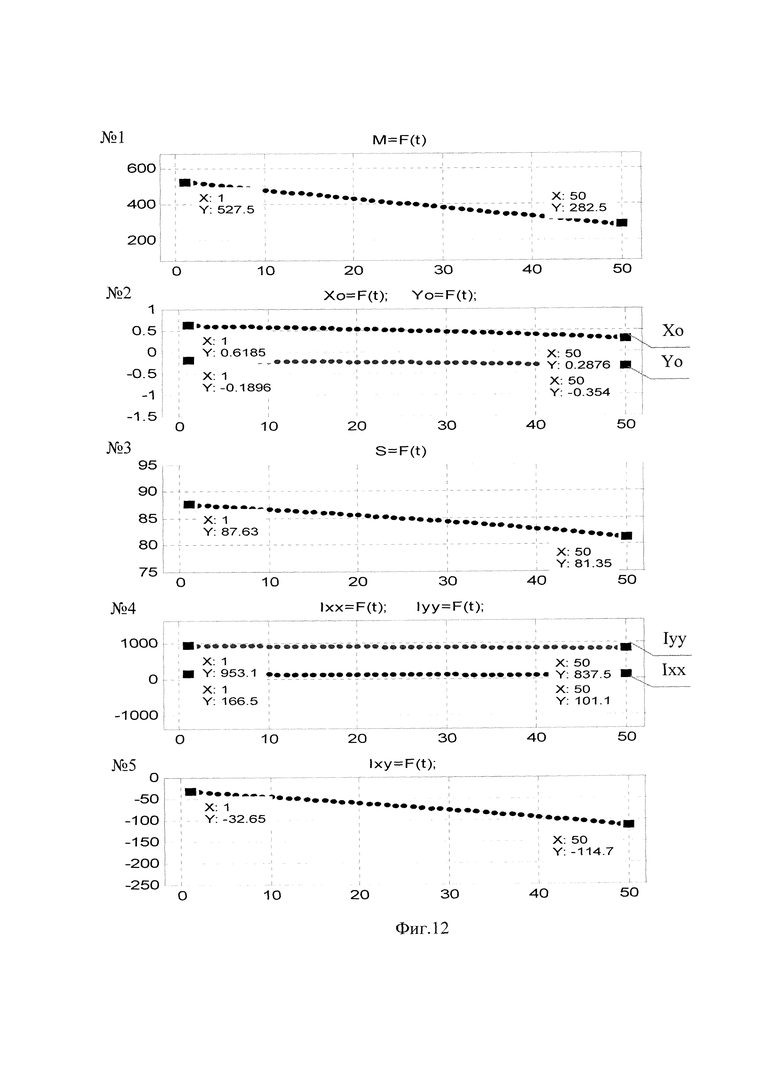
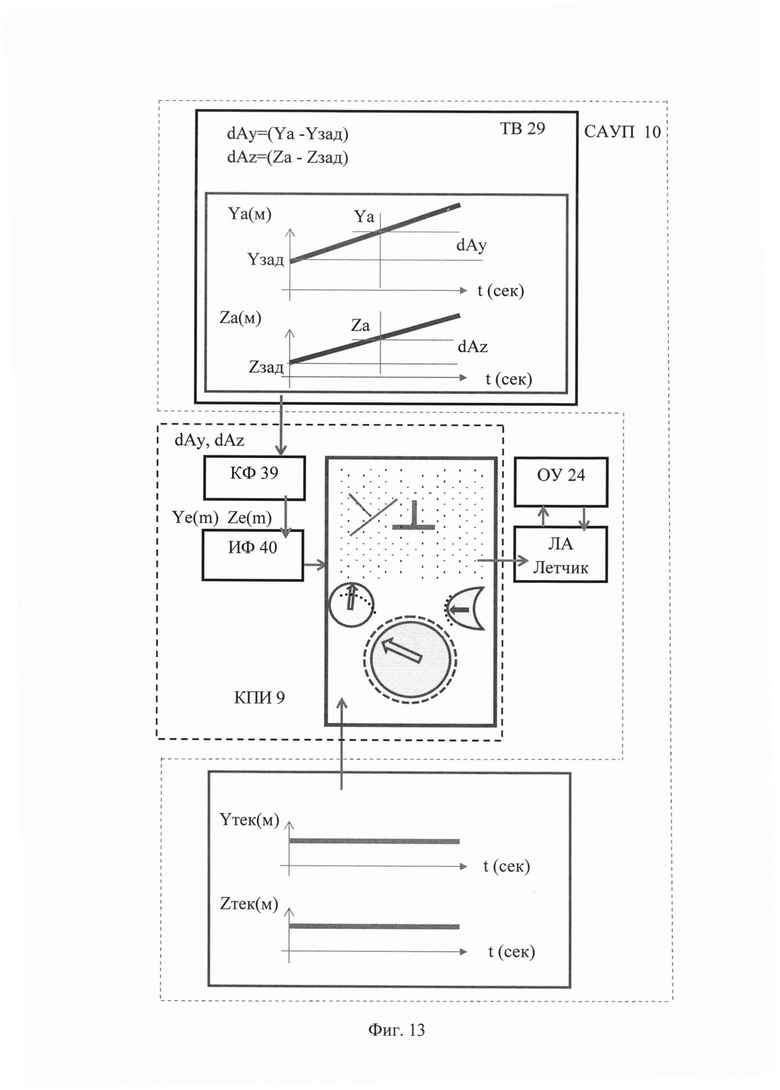
Командно-пилотажный индикатор вертолета содержит экран, выполненный с возможностью индикации индекса «Самолет» в виде прямой, символизирующей крылья летательного аппарата (ЛА), а также подвижного индекса «Лидер», имеющего дополнительно вертикальную прямую, символизирующую киль ЛА, а также с возможностью индикации определенных параметров полета, полученные из соответствующих блоков их измерения и вычисления, средства управления индексом «Лидер». Обеспечивается повышение информативности изображения на индикационном поле экрана. 13 ил.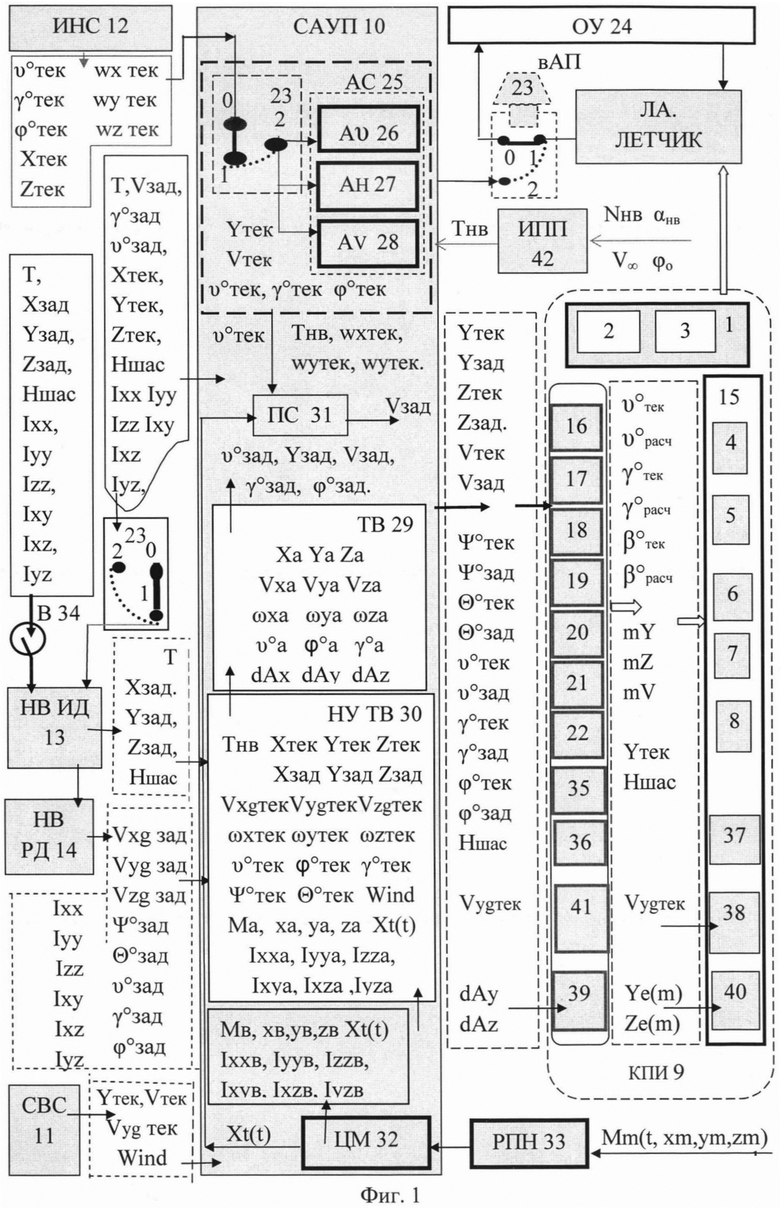
Командно-пилотажный индикатор вертолета, содержащий экран, на котором индицируются неподвижный относительно центра индикационного поля экрана отсчетный индекс "Самолет", выполненный в виде одной горизонтальной прямой, символизирующей крылья летательного аппарата (ЛА), и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии и обозначающий текущее положение вертолета в пространстве, индицируемый на экране подвижный индекс "Лидер", выполненный в виде одной горизонтальной прямой, символизирующей крылья ЛА, и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии, а также перемещения по вертикали и горизонтали относительно индекса "Самолет" и обозначающий требуемое положение в пространстве, генератор символов соединенный с экраном, средства управления подвижным индексом "Лидер", выполненные в виде блока вычисления характеристик "Лидера", а именно: блока вычисления параметров текущего угла скольжения, блока вычисления значения расчетного угла крена, блока вычисления расчетного угла скольжения, блока расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА, блока вычисления значения расчетного угла тангажа, блока расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА, на входы которых поступают сигналы из систем ЛА, а с выходов которых на генератор символов поступают сигналы в соответствии с величиной ошибки управления по высоте, обеспечивающие перемещение индекса "Лидер" по индикационному полю в вертикальном направлении, с возможностью индикации индекса "радиовысота" и неподвижной неравномерной шкалы значения высоты полета, индицируемой на вертикальной стороне границы индикационного поля экрана с нулевым значением высоты, расположенным на уровне горизонтальной линии, проходящей через центр индикационного поля экрана, при этом, индекс "Самолет" и индекс "Лидер" выполнены с возможностью одновременного отображения угла скольжения и угла тангажа путем индикации треугольника, основание которого равно длине горизонтальной прямой линии символизирующей крылья ЛА, а положение вершины треугольника соответствует текущему значению угла тангажа и угла скольжения индексом "Самолет" и отклонению от заданного значения угла тангажа и угла скольжения индексом "Лидер" поворотом индекса "Лидер" вокруг центра симметрии в соответствии с величиной ошибки по углу крена, увеличением или уменьшением линейных размеров индекса «Лидер» при увеличении или уменьшении, соответственно, заданной скорости полета таким образом, что при нулевых значениях ошибок по всем контролируемым параметрам индекс "Лидер" совмещается с индексом "Самолет", средства управления командно-пилотажного индикатора дополнительно используют: блок учета расхода в полете массы полезной нагрузки вертолета, блок, индицирующий указатель скорости полета вертолета, указателем скорости полета вертолета с числовой шкалой, индексом указателя текущей скорости полета вертолета, индексом указателя заданной скорости полета вертолета, блок вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значения параметра продольного расстояния от центра масс вертолета до оси несущего винта, блок расчета прогнозируемой скорости полета вертолета, переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости, отличающийся тем, что дополнительно снабжен: блоком указателем вертикальной скорости полета вертолета, блоком пересчета координат частиц «Фона» фрагмента неподвижной воздушной атмосферы в координаты индикационного поля экрана, блоком, индицирующим частицы «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля экрана, блоком траекторного вычислителя, блоком начальных условий траекторного вычислителя, блоком измерения параметров полета вертолета, вход блока измерения параметров полета вертолета соединен с основными системами вертолета по кинематическим параметрам числа оборотов несущего винта, углов атаки лопастей несущего винта, скорости набегающего потока, общего шага несущего винта, а выход соединен с входом блока системы автоматического управления полетом вертолета по параметру тяги несущего винта, выход блока инерциальной навигационной системы по параметрам проекции вектора текущей угловой скорости вертолета на оси связанной с вертолетом системы координат, соединен с входом блока системы автоматического управления полетом, выход которого соединен с входом блока начальных условий траекторного вычислителя по параметрам: тяги несущего винта, текущего значения дальности полета вертолета, текущего значения высоты полета вертолета, текущего значения бокового отклонения вертолета, программно-заданной дальности на маршруте от точки старта, программно-заданной высоты полета на маршруте, программно-заданного бокового отклонения, текущего значения вектора скорости полета вертолета, проекция вектора текущей скорости полета вертолета на вертикальную ось земной системы координат, проекций вектора текущей угловой скорости вертолета на оси связанной с вертолетом системы координат, текущего углового положения вертолета по углу тангажа, рыскания, крена, текущего угла поворота траектории, текущего угла наклона траектории, текущих горизонтальных проекций вектора средней скорости ветра в земной системе координат, текущей массы вертолета, координат центра масс вертолета в связанной с вертолетом системе координат, текущего значения продольного расстояния от оси несущего винта до центра масс вертолета, моментов инерции вертолета в полете, а выход блока начальных условий траекторного вычислителя соединен с входом блока траекторного вычислителя по параметрам начальных условий для интегрирования уравнений пространственного движения виртуального вертолета: тяги несущего винта, текущего значения дальности полета вертолета, текущего значения высоты полета вертолета, текущего значения бокового отклонения вертолета, программно-заданной дальности на маршруте от точки старта, программно-заданной высоты полета на маршруте, программно-заданного бокового отклонения, проекций вектора текущих значений скорости полета вертолета на оси земной системы координат, проекций вектора текущей угловой скорости вертолета на оси связанной с вертолетом системы координат, текущего углового положения вертолета по углу тангажа, рыскания, крена, текущего угла поворота траектории, текущего угла наклона траектории, текущих горизонтальных проекций вектора средней скорости ветра в земной системе координат, текущей массы виртуального вертолета, координатам текущего центра масс вертолета в связанной с вертолетом системе координат, текущего значения продольного расстояния от оси несущего винта до центра масс вертолета, моментам инерции виртуального вертолета в полете, выход блока траекторного вычислителя по параметрам текущих разностей между вычисленными прогнозируемыми значениями параметров полета виртуального вертолета и программно-заданными значениями параметров полета вертолета, управляемого летчиком в осях земной системы координат, соединен с входом блока системы автоматического управления полетом вертолета, с выхода которого параметры текущих разностей между вычисленными прогнозируемыми значениями параметров полета виртуального вертолета и программно-заданными значениями параметров полета вертолета, управляемого летчиком в осях земной системы координат, и параметр проекции вектора текущей скорости полета вертолета на вертикальную ось земной системы координат поступают в блок командно-пилотажного индикатора, в котором параметр текущих разностей между вычисленными прогнозируемыми значениями параметров полета виртуального вертолета и программно-заданными значениями параметров полета вертолета, управляемого летчиком в осях земной системы координат, соединен с входом блока пересчета координат частиц «Фона» фрагмента неподвижной воздушной атмосферы в координаты индикационного поля экрана, выход которого в блоке генератора символов соединен с входом блока, индицирующего частицы «Фона» фрагмента неподвижной воздушной атмосферы в координатах индикационного поля экрана, а параметр проекции вектора текущей скорости полета вертолета на вертикальную ось земной системы координат поступает в блоке генератора символов на вход блока указателя вертикальной скорости полета вертолета, причем, блок генератора символов выполнен с возможностью индикации на индикационном поле экрана координат частиц «Фона» текущего фрагмента неподвижной воздушной атмосферы и индикации на навигационном поле экрана прибора вертикальной скорости полета вертолета.
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2002 |
|
RU2207514C1 |
| EP 2899509 A1, 29.07.2015 | |||
| ЯДЕРНОЕ ЭНЕРГЕТИЧЕСКОЕ УСТРОЙСТВО | 1996 |
|
RU2107340C1 |

