Изобретение относится к устройствам отображения информации, используемой пилотом и членами экипажа при пилотировании вертолетом, а именно к командно-пилотажным индикаторам (КПИ).
Наиболее близким по технической сущности к заявляемому техническому решению является «Командно-пилотажный индикатор». Патент на изобретение РФ №2539708 заявка №2013158499/11 решение о выдаче патента приоритет от 30 декабря 2013 г. МПК G01C 23/00, G05D 1/00, (Бездетнов НП, Бардин ЕН), (описание по формуле изобретения. (УС - Прогнозируемая скорость 30 декабря 2013)) состоящмй из экрана, на котором индицируются: - неподвижный относительно центра индикационного поля экрана отсчетный индекс "Самолет", выполненный в виде одной горизонтальной прямой, символизирующей крылья летательного аппарата (ЛА), и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии и обозначающий текущее положение вертолета в пространстве; - подвижный индекс "Лидер", выполненный в виде одной горизонтальной прямой, символизирующей крылья ЛА и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии, а также перемещения по вертикали и горизонтали относительно индекса "Самолет" и обозначающий требуемое положение вертолета в пространстве. - генератор символов соединенный с экраном, Средства управления подвижным индексом "Лидер", выполнены в виде блока вычисления характеристик "Лидера": - блока вычисления параметров текущего угла скольжения; блока вычисления значения расчетного угла крена; - блока вычисления расчетного угла скольжения; - блока расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА; - блока вычисления значения расчетного угла тангажа; - блока расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА. На входы средств управления поступают сигналы из систем ЛА, а с выходов средств управления на генератор символов поступают сигналы в соответствии с величиной ошибки управления по высоте, обеспечивающие перемещение индекса "Лидер" по индикационному полю в вертикальном направлении, а также сигналы индицирующие индекс "радиовысота" и неподвижную неравномерную шкалу значения высоты полета, индицируемую на вертикальной стороне границы индикационного поля экрана с нулевым значением высоты, расположенной на уровне горизонтальной линии, проходящей через центр индикационного поля экрана; Индекс "Самолет" и индекс "Лидер" выполнены с возможностью одновременного отображения угла скольжения и угла тангажа, путем индикации треугольника. Основание треугольника равно длине горизонтальной прямой линии символизирующей крылья ЛА, а положение вершины треугольника соответствует текущему значению угла тангажа и угла скольжения для индекса "Самолет" и отклонению от заданного значения угла тангажа и угла скольжения для индекса "Лидер". Индекс "Лидер" выполнен с возможностью поворота вокруг центра симметрии в соответствии с величиной ошибки по углу крена, увеличением или уменьшением линейных размеров при увеличении или уменьшении, соответственно, заданной скорости полета таким образом, что при нулевых значениях ошибок по всем контролируемым параметрам индекс "Лидер" совмещается с индексом "Самолет". Командно-пилотажный индикатор (КПИ) снабжен: - блоком учета расхода в полете массы полезной нагрузки вертолета; - блоком индицирующим указатель скорости полета вертолета, указатель скорости полета вертолета с числовой шкалой, индекс указателя текущей скорости полета вертолета, индекс указателя заданной скорости полета вертолета; - блоком вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значения параметра продольного расстояния от центра масс вертолета до оси несущего винта; - блоком расчета прогнозируемой скорости полета вертолета и - переключателем блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости, причем, вход блока учета расхода в полете массы полезной нагрузки вертолета соединен с системами ЛА по параметрам расходуемой в полете массы полезной нагрузки вертолета, а выход соединен с входом блока вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значение параметра продольного расстояния от центра масс вертолета до оси несущего винта по параметру расходуемой в полете полезной нагрузки вертолета, выход которого соединен с первым входом блока расчета прогнозируемой скорости полета вертолета по параметру продольного расстояния от центра масс вертолета до оси несущего винта, а второй вход блока расчета прогнозируемой скорости полета вертолета соединен через переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости по параметру текущего значения угла тангажа, а выход блока прогнозируемой скорости полета вертолета по параметру заданной скорости полета вертолета и выход блока системы автоматического управления полетом по параметру текущей скорости полета вертолета соединены с входом блока индицирующим указатель скорости полета вертолета представляя указатель скорости полета вертолета с числовой шкалой, индексом указателя текущей скорости полета вертолета, индексом указателя заданной скорости полета вертолета, выход которого соединен с генератором символов, который выполнен с возможностью индикации прибора указателя скорости полета вертолета с числовой шкалой и индексом указателя текущей скорости полета вертолета и индексом указателя заданной скорости полета вертолета, представленных в виде узких тонких пластин с заостренным концом, установленных с возможностью вращения относительно оси прибора указателя скорости полета вертолета. В известном командно-пилотажном индикаторе вертолета, визуализация полетной информации, обеспечивается данными поступающими с датчиков приборов и блоков устройств, которые находятся на борту вертолета: - с датчиков системы воздушных сигналов (СВС), поступают текущие параметры значения высоты полета вертолета, значения вектора скорости вертолета, проекцию вектора вертикальной скорости вертолета, проекции скорости ветра в земной системе координат; - с датчиков инерциальной навигационной системы (ИНС) поступают параметры текущего значения угла тангажа, угла крена, угла рыскания, текущего значения дальности полета вертолета и бокового отклонения. - с датчиков (ЦМ), поступают параметры, по которым вычисляется текущее положение центра масс вертолета, моменты инерции вертолета в полете и значение параметра продольного расстояния от центра масс вертолета до оси несущего винта с учетом расхода в полете массы полезной нагрузки вертолета (например: топливо, грузы, боезапас). По текущим параметрам, поступающим от датчиков, установленных на вертолете, осуществляется маневр вертолета в пространстве с визуализацией на экране КПИ индексов «Самолет», «Лидер» и других необходимых для пилотирования вертолета навигационных параметров, обеспечивающих заход в точку зависания вертолета над ВППл корабля и посадку вертолета на ВППл корабля.
В книге «Безопасность полетов вертолетов КА-27, КА-32, КА-29» В.В. Алексеева, посадка вертолета на взлетно-посадочной площадки (ВППл) корабля в сложных гидрометеорологических условиях днем и ночью осуществляется при волнении моря «6» баллов, при бортовой качке (Δγ° равной ± 8°) и килевой качке (Δυ° равной ± 3°) со средними периодами (Δt около 12 с) секунд. Важной особенностью ВППл кораблей является их подвижность. Вследствие волнения моря и наличия качки, ВППл корабля совершает сложное пространственное движение. При этом ВППл имеет как линейные, так и угловые перемещения относительно горизонтальной поверхности. Подвижность вертолета, корабля и ВППл требует от летчика, в процессе ночного пилотирования вертолета и пилотирования в сложных метеоусловиях, решения ряда сложных навигационных и пилотажных задач в процессе сближения с кораблем при взлете и посадке на ВППл. Кроме того, переменная и быстро изменяющая обстановка на ВППл, требует от летчика в процессе взлета и посадки только правильных решений и действий с целью обеспечения безопасности полета. При пилотировании в точку зависания над качающейся взлетно-посадочной площадкой (ВППл) корабля, летчик испытывает психофизиологическую и нервную нагрузку. От летчика требуется профессиональный опыт, чтобы направлять вертолет в точку висения, над ВППл корабля, учитывая суммарное направление вектора скорости корабля и направление вектора скорости ветра и выдерживать заданный угол глиссады. Пилотирование с зависанием, висением и посадкой на ВППл корабля требует от летчика большого объема внимания и пространственного видения углового положения ВППл корабля по углу крена и углу дифферента и одновременного видения углового положения своего вертолета по углу крена, углу тангажа и пространственного положения вертолета над ВППл корабля. Взлет вертолета, с качающейся взлетно-посадочной площадки (ВППл) корабля, не менее сложен. Летчик должен отвлекаться от показаний навигационных приборов своего вертолета и интуитивно определять момент взлета или момент посадки, и одновременно должен определять за период качания корабля по крену и дифференту, минимальное отклонение ВППл корабля от горизонтальной плоскости, чтобы не допустить возникающей иллюзии перемещения ВППл корабля в пространстве, не допустить соскальзывания вертолета с ВППл корабля. Психофизиологическая и нервная нагрузка, которую испытывает летчик, при полете в точку висения над качающейся взлетно-посадочной площадкой (ВППл) корабля, объясняется недостаточным объемом представляемых данных о пространственном состоянии системы «корабль-вертолет» и, соответственно, возможностью визуализации с помощью индексов «Самолет» и «Лидер» на экране КПИ взаимного движения траектории ВППл корабля и траектории вертолета.
Технической задачей заявляемого изобретения является:
- повышение безопасности и упрощение контроля выполнения программных режимов полета;
- упрощение пилотирования вертолетом при полете в сложных метеоусловиях в точку зависания над ВППл корабля;
- исключение аварийных случаев при посадке вертолета в сложных метеоусловиях на ВППл корабля за счет повышения информационной наглядности представления на экране КПИ прогнозируемых параметров динамики движения вертолета;
- уменьшить психофизиологическую и нервную нагрузку на летчика при посадке вертолета на ВППл корабля при возникающей иллюзии перемещения ВППл корабля.
- уменьшение психофизиологической и нервной нагрузки на летчика при посадке вертолета на ВППл корабля при возникающей иллюзии перемещения ВППл корабля в условиях синдрома эмоционального выгорания (эмоциональные нагрузки, вибрации, нехватка кислорода, перепады давления, дефицит времени на принятие решения, сложные метеоусловия, полет на малой высоте и другие аналогичные факторы);
Техническая задача достигается тем, что командно-пилотажный индикатор вертолета, содержащий экран, на котором индицируются неподвижный относительно центра индикационного поля экрана отсчетный индекс "Самолет", выполненный в виде одной горизонтальной прямой, символизирующей крылья летательного аппарата (ЛА), и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии и обозначающий текущее положение вертолета в пространстве, индицируемый на экране подвижный индекс "Лидер", выполненный в виде одной горизонтальной прямой, символизирующей крылья ЛА и одной. вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии, а также перемещения по вертикали и горизонтали относительно индекса "Самолет" и обозначающий требуемое положение в пространстве, генератор символов соединенный с экраном, средства управления подвижным индексом "Лидер", выполненные в виде блоков вычисления характеристик "Лидера" а именно: - блока вычисления параметров текущего угла скольжения, - блока вычисления значения расчетного угла крена, - блока вычисления расчетного угла скольжения, - блока расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА, - блока вычисления значения расчетного угла тангажа, - блока расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА, на входы которых поступают сигналы из систем ЛА, а с выходов которых на генератор символов поступают сигналы в соответствии с величиной ошибки управления по высоте, обеспечивающие перемещение индекса "Лидер" по индикационному полю в вертикальном направлении, с возможностью индикации индекса "радиовысота" и неподвижной неравномерной шкалы значения высоты полета, индицируемой на вертикальной стороне границы индикационного поля экрана с нулевым значением высоты, расположенным на уровне горизонтальной линии, проходящей через центр индикационного поля экрана, при этом, индекс "Самолет" и индекс "Лидер" выполнены с возможностью одновременного отображения угла скольжения и угла тангажа, путем индикации треугольника, основание которого равно длине горизонтальной прямой линии символизирующей крылья ЛА, а положение вершины треугольника соответствует текущему значению угла тангажа и угла скольжения индексом "Самолет" и отклонению от заданного значения угла тангажа и угла скольжения индексом "Лидер" поворотом индекса "Лидер" вокруг центра симметрии в соответствии с величиной ошибки по углу крена, увеличением или уменьшением линейных размеров индекса «Лидер» при увеличении или уменьшении, соответственно, заданной скорости полета таким образом, что при нулевых значениях ошибок по всем контролируемым параметрам индекс "Лидер" совмещается с индексом "Самолет", средства управления командно-пилотажного индикатора дополнительно используют: - блок учета расхода в полете массы полезной нагрузки вертолета, - блок индицирующим указатель скорости полета вертолета, указателем скорости полета вертолета с числовой шкалой, индексом указателя текущей скорости полета вертолета, индексом указателя заданной скорости полета вертолета, - блок вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значения параметра продольного расстояния от центра масс вертолета до оси несущего винта, - блок расчета прогнозируемой скорости полета вертолета и - переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости, дополнительно снабжен: - приемником параметров пространственного положения конуса посадки, - переключателем ввода данных параметров конуса посадки, - блоком вычисления аналитических параметров конуса посадки, - блоком вычисления прогнозируемых сил и момент, действующих на центр масс вертолета при сжатии упругих элементов стоек шасси, - блоком траекторного вычислителя, - блоком начальных условий траекторного вычислителя, - блоком корабля, передающего параметры конуса посадки по каналу связи «корабль-вертолет», причем выход блока корабля, передающего параметры конуса посадки по каналу связи «корабль-вертолет», соединен с входом приемника параметров пространственного положения конуса посадки по каналу связи «корабль-вертолет» по параметрам конуса посадки: - текущего времени, - проекциям скорости корабля в земной системы координат, - текущему углу курса корабля, - модулю текущего вектора средней скорости ветра, - направлению ветра, - значениям углов, обеспечивающих безопасный подход к точке зависания над ВППл корабля, - значению угла глиссады, - расстоянию от центра масс корабля до центра плоскости ВППл корабля, - программно задаваемой высоте полета вертолета на исполнение команды «убрать шасси»/«выпустить шасси», - текущему угловому положению корабля по углам дифферента, рыскания и крена, - координате центра масс корабля в земной системе координат, выход которого через переключатель ввода данных параметров конуса посадки по параметрам конуса посадки соединен с первым входом блока вычисления аналитических параметров конуса посадки, в котором второй вход по параметрам - координат текущего положения центра масс вертолета в земной системе координат и выход по параметрам: - массива числовых значений поверхности конуса посадки, - массива числовых значений образующей конуса посадки, - вычисленного значения угла глиссады, - заданного направления вектора результирующего воздушного потока, - программно-задаваемым координатам конечной точки участка траектории полета соединены с блоком системы автоматического управления полетом, в котором выход по изменяющимся в полете параметрам: - текущей массы вертолета, - координатам текущего положения центра масс вертолета в земной системе координат, - инерционно-массовым характеристиками для связанных осей системы координат вертолета, - текущему значению продольного расстояния от оси несущего винта до центра масс вертолета, - текущему значению скорости полета вертолета, - текущим проекциям вектора угловой скорости, - текущему угловому положению вертолета (углу тангажа, углу рыскания, углу крена), - текущему угловому положению плоскости ВППл корабля (по углу дифферента, углу рыскания и углу крена), - текущему значению угла поворота траектории вертолета, - текущему значению угла наклона траектории вертолета, - модулю текущего вектора средней скорости ветра, - координатам точки траектории, к которой движется вертолет на программно-задаваемом маршруте при заходе на посадку на качающуюся плоскость ВППл корабля (программно-задаваемой дальности на маршруте, программно-задаваемой высоте полета вертолета на маршруте, программно-задаваемому боковому отклонению полета вертолета) соединен с первым входом, а выход по параметрам: - значений неизменяющихся величин пространственного положения стоек шасси в связанной с вертолетом системе координат, - расстояния от центра масс корабля до центра плоскости ВППл корабля соединен со вторым входом блока начальных условий траекторного вычислителя, выход которого соединен с первым входом в блок траекторного вычислителя по параметрам: - текущей массы вертолета, - текущих координат пространственного положения центра масс вертолета в земной системе координат, - вычисленных инерционно-массовых характеристик для связанных осей системы координат вертолета, - текущего значения продольного расстояния от оси несущего винта до центра масс вертолета, - проекций вектора текущей скорости полета вертолета, - текущих проекций вектора угловой скорости, - текущего углового положения вертолета (углу тангажа, углу рыскания, углу крена), - текущего значение угла поворота траектории вертолета, - текущего значения угла наклона траектории вертолета, - текущих горизонтальных проекций вектора средней скорости ветра в земной системе координат, - значений вычисленных векторов прогнозируемых сил в земной системе координат, - значений вычисленных векторов прогнозируемых моментов в связанной системе координат, - значений неизменяющихся величин пространственного положения стоек шасси в связанной с вертолетом системе координат, - текущего углового положения плоскости ВППл корабля (по углу дифферента, углу рыскания и углу крена), - прогнозируемого коэффициента масштаба скорости полета ЛА, - расстояния от центра масс корабля до центра плоскости ВППл корабля, первый выход из которого соединен для всех стоек шасси по параметру разности прогнозируемого пространственного положения колеса стойки шасси и координат проекции прогнозируемого пространственного положения колеса стойки шасси на ВППл корабля с входом в блок вычисления прогнозируемых сил и моментов, действующих на центр масс вертолета при сжатии упругих элементов стоек шасси, выход из которого соединен по параметрам: - значений вычисленных векторов прогнозируемых сил в земной системе координат, - значений вычисленных векторов прогнозируемых моментов в связанной системе координат и прогнозируемого значения коэффициента масштаба скорости полета ЛА со вторым входом в блок траекторного вычислителя, второй выход которого соединен по параметру прогнозируемого значения коэффициента масштаба скорости полета ЛА с входом в блок системы автоматического управления полетом, выход из которого по параметру величины заданной скорости полета вертолета умноженной на прогнозируемое значение коэффициента масштаба скорости полета ЛА соединен с входом в блок вычисления коэффициента скорости полета вертолета и входом в блок, индицирующего указатель скорости полета вертолета, указателем скорости полета вертолета с числовой шкалой, индексом указателя текущей скорости полета вертолета, индексом указателя заданной скорости полета вертолета, выходы которых соединены с генератором символов, который выполнен с возможностью индикации прибора указателя скорости полета вертолета с числовой шкалой, индексом указателя текущей скорости полета вертолета, индексом указателя заданной скорости полета вертолета.
Изобретение поясняется чертежами.
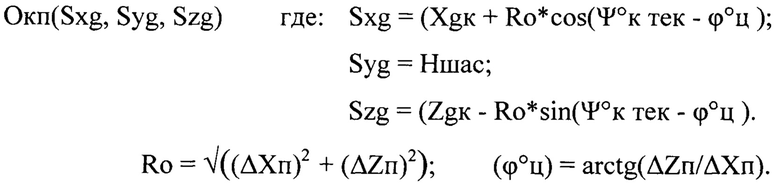
На фиг. 1 Изображена схема сопряжения систем вертолета с командно-пилотажным индикатором.
На фиг. 2 Изображена функциональная схема командно-пилотажного индикатора.
На фиг. 3 Изображен экран командно-пилотажного индикатора с указателем скорости полета вертолета (УС), экрана, навигационного поля, индикационного поля, индекса «Лидер», «Самолет», с числовой шкалой значений величин скоростей полета ЛА, индексом указателя текущей скорости полета вертолета и индексом указателя заданной скорости полета вертолета.
На фиг. 4 Изображены системы координат, принятые при расчетах положения ВППл корабля относительно центра масс корабля.
На фиг. 5 Изображено угловое положение корабельной системы координат и системы координат связанной с ВППл корабля относительно осей земной системы координат.
На фиг. 6 Изображена система координат конуса посадки относительно корабельной системы координат и земной системы координат.
На фиг. 7 Представлена схема вычисления вектора скорости результирующего воздушного потока.
На фиг. 8 Представлено пространственное положение конуса посадки относительно корабельной системы координат.
На фиг. 9 Изображено графическое представление аналитических параметров конуса посадки.
На фиг. 10 Представлены, стилизованное изображение корабля и системы координат в начальном положении, используемые в расчетах для захода на посадку вертолета на ВППл корабля.
На фиг. 11 Представлены, стилизованное изображение корабля и системы координат в измененном положении, используемые в расчетах для захода на посадку вертолета на ВППл корабля.
На фиг. 12 Изображена блок-схема вычисления аналитических параметров конуса посадки.
На фиг. 13 Изображена блок-схема алгоритма для решения системы дифференциальных уравнений совместного пространственного движения ВППл корабля и пространственного движения вертолета.
На фиг. 14 Представлено прогнозируемое графическое решение процесса посадки вертолета на ВППл корабля: положительное смещение центра масс (ΔZ>0), вертикальная скорость снижения вертолета (Vy), положительный угол крена ВППл корабля (γ°ВППл>0), положительная угловая скорость качания ВППл корабля (ωхк>0).
На фиг. 15 Представлено прогнозируемое графическое решение процесса посадки вертолета на ВППл корабля: положительное смещение центра масс (ΔZ>0), вертикальная скорость снижения вертолета (Vy), положительный угол крена ВППл корабля (γ°ВППл>0), отрицательная угловая скорость качания ВППл корабля (ωхк<0).
На фиг. 16 Представлено прогнозируемое графическое решение процесса посадки вертолета на ВППл корабля: положительное смещением центра масс (ΔZ>0), вертикальная скорость снижения вертолета (Vy), отрицательный угол крена ВППл корабля (γ°ВППл<0), положительная угловая скорость качания ВППл корабля (ωхк<0).
На фиг. 17 Представлено графическое представление процесса посадки вертолета на ВППл корабля: положительное смещением центра масс (ΔZ>0), вертикальная скорость снижения вертолета (Vy), отрицательный угол крена ВППл корабля (γ°ВППл<0), отрицательная угловая скорость качания ВППл корабля (ωхк<0).
На фиг. 18 Представлен график прогнозируемых сил, действующих на упругие стойки шасси при посадке вертолета на ВППл корабля от времени t=35 секунды до времени t=45 секунды.
На фиг. 19 Представлен график прогнозируемых сил, действующих на упругие стойки шасси при посадке вертолета на ВППл корабля от времени t=0 секунды до времени t=200 секунды.
Заявляемый командно-пилотажный индикатор состоит из:
- экрана командно-пилотажного индикатора 1, далее экран 1, разделенного на навигационное поле 2 экрана 1 и индикационное поле 3 экрана 1;
- блока, индицирующего на индикационном поле 3 экрана 1 подвижный индекс неуправляемый летчиком "Лидер" 4, далее "Лидер" 4:
- блока индицирующего на индикационном поле 3 экрана 1 подвижный индекс управляемого летчиком "Самолет" 5 далее "Самолет" 5;
- блока индицирующего на навигационном поле 2 и индикационном поле 3 экрана 1 неподвижную неравномерную расположенную на вертикальной стороне границы навигационного поля 2 и индикационного поля 3 экрана 1 шкалу значения высоты 6 полета вертолета, далее шкала высоты 6;
- блока индицирующего на навигационном поле 2 экрана 1 различную навигационную информацию текущих значений параметров полета вертолета 7 (например: указатель курса, указатель вертикальной скорости полета (вариометр) и другие приборы);
- блока индицирующего на экране 1 индекс "радиовысоты" 8;
- блока командно-пилотажного индикатора (КПИ) 9;
- блока системы автоматического управления полетом (САУП) 10;
- блока системы воздушных сигналов (СВС) 11;
- блока инерциальной навигационной системы (ИНС) 12;
- блока навигационного вычислителя исходных данных (НВ ИД) 13;
- блока навигационного вычислителя расчетных данных (НВ РД) 14;
- блока генератора символов (ГС) 15;
- блока вычисления параметров текущего угла скольжения 16;
- блока вычисления значения расчетного угла крена 17;
- блока вычисления расчетного угла скольжения 18;
- блока вычисления коэффициента скорости полета вертолета 19;
- блока расчета отклонения вертолета по высоте полета и коэффициента масштаба отклонения высоты полета вертолета 20;
- блока вычисления значения расчетного угла тангажа 21;
- блока расчета бокового отклонения и коэффициента масштаба бокового отклонения вертолета 22;
- переключателя блоков автопилота функций автоматической стабилизации по тангажу, высоте, скорости (вАП) 23;
- органов управления вертолетом (ОУ) 24;
- блока автопилота функций автоматической стабилизации (АС) 25;
- блока автопилота функции стабилизации по тангажу (Aυ), по высоте (Ан), по скорости (Av), по крену (Аγ), по курсу (Аψ) - 26;
- приемника параметров пространственного положения конуса посадки (СКП) 27;
- переключателя ввода данных параметров конуса посадки (В) 28;
- блока вычисления аналитических параметров конуса посадки (КП) 29
- блока вычисления прогнозируемых сил и момент, действующих на центр масс вертолета при сжатии упругих элементов стоек шасси (ПСМ) 30;
- блока расчета прогнозируемой скорости полета вертолета (ПС) 31;
- блока вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значение параметра продольного расстояния от центра масс вертолета до оси несущего винта (ЦМ) 32;
- блока учета расхода в полете массы полезной нагрузки вертолета (например: топливо, грузы, боезапас) (РПН) 33;
- переключателя ввода исходных данных параметров программной трехмерной траектории полета вертолета (В) 34;
- блока индицирующего на индикационном поле 3 экрана 1 команду «убрать шасси»/«выпустить шасси» для индекса "Лидер" 4 (КШ) 35;
- блока внутреннего языка для визуализации переменной шкалы высоты полета вертолета (Ш) 36;
- указателя скорости полета вертолета (УС) 37 с числовой шкалой, индексом указателя текущей скорости полета вертолета, индексом указателя заданной скорости полета вертолета (далее - указатель скорости полета вертолета);
- указателя вертикальной скорости полета вертолета (ВС) 38;
- блока траекторного вычислителя (ТВ) 39;
- блока начальных условий траекторного вычислителя (НУ ТВ) 40;
- блока, индицирующего указатель скорости полета вертолета, указателем скорости полета вертолета с числовой шкалой, индексом указателя текущей скорости полета вертолета, индексом указателя заданной скорости полета вертолета (БУС) 41;
- блока корабля, передающего параметры конуса посадки по каналу связи «корабль-вертолет» (КПК) 42;
Полетная информация (фиг. 1) визуализируется летчику вертолета на индикационном поле 3 и навигационном поле 2 экрана 1 блока командно-пилотажного индикатора (КПИ) 9, по параметрам полета, поступающим с выхода блока системы автоматического управления полетом (САУП) 10 на вход (КПИ) 9, где:
- текущее значение высоты полета вертолета - Yтек;
- программно задаваемая высота полета вертолета на маршруте - Yзад;
- текущее боковое отклонении вертолета - Zтек;
- программно задаваемое боковое отклонение полета вертолета - Zзад;
- текущее значение скорости полета вертолета - Vтек;
- программно задаваемое значение скорости полета вертолета - Vзад.
- текущее значение угла поворота траектории вертолета - Ψ°тек;
- программно задаваемый угол поворота траектории вертолета - Ψ°зад;
- текущее значение угла наклона траектории вертолета - Θ°тек;
- программно задаваемый угол наклона траектории вертолета - Θ°зад;
- текущее значение угла тангажа - υ°тек;
- программно задаваемое угловое положение вертолета на траектории по углу тангажа - υ°зад;
- текущее значение угла крена - γ°тек;
- программно задаваемое угловое положение вертолета на траектории по углу крена - γ°зад;
- текущее значение угла рыскания - ϕ°тек;
- программно задаваемое угловое положение вертолета на траектории по углу рыскания - ϕ°зад;
- программно задаваемая высота полета вертолета на исполнение команды «убрать шасси»/«выпустить шасси» - Ншас;
- текущее значение вертикальной скорости вертолета - Vyg тек;
Параметры передаются по протоколу обмена (ПО 1) (Yтек, Yзад, Zтек, Zзaд, Vтек, Vзад, Ψ°тек, Ψ°зад, Θ°тек, Θ°зад, υ°тек, υ°зад, γ°тек, γ°зад, ϕ°тек, ϕ°зад, Ншас, Vyg тек).
Для визуализации полетной информации в блоке командно-пилотажного индикатора (КПИ) 9 используются внутренние рабочие переменные:
- текущее значение угла тангажа - υ°тек;
- расчетное значение угла тангажа - υ°расч;
- текущее значение угла крена - γ°тек;
- расчетное значение угла крена - γ°расч;
- текущее значение угла скольжения - β°тек;
- расчетное значение угла крена - β°расч;
- коэффициента масштаба отклонения высоты полета ЛА - mH;
- коэффициента масштаба бокового отклонения ЛА - mZ;
- коэффициента масштаба скорости полета Л А - mV;
- текущее значение высоты полета вертолета - Yтек;
- программно-задаваемая высота полета вертолета на исполнение команды «убрать шасси»/«выпустить шасси» - Ншас.
На вход блока системы автоматического управления полетом (САУП) 10 для вычисления управляющих сигналов и параметров визуализации поступают параметры полета от основных систем вертолета, где:
- с выхода блока системы воздушных сигналов (СВС) 11 параметры текущего значения высоты полета вертолета - Yтек, текущего значения скорости полета вертолета - Vтек, текущего значения вертикальной скорости вертолета - (Vyg тек) и текущие горизонтальные проекции вектора средней скорости ветра в земной системе координат - Wind=f (Wxg, Wzg). где: Wind - модуль текущего вектора средней скорости ветра, Wxg, Wzg - горизонтальная проекция вектора средней скорости ветра (Wind) в земной системе координат. Параметры передаются по протоколу обмена (ПО 2) (Yтек, Vтек, Vygтек, Wxg, Wzg).
- с выхода блока инерциальной навигационной системы (ИНС) 12 поступают параметры углового и пространственного положения вертолета: υ°тек, γ°тек, ϕ°тек, соответственно, текущее значение угла тангажа, текущее значение угла крена, текущее значение угла рыскания и Хтек - текущее значение дальности полета вертолета, Zтек - текущее боковое отклонении вертолета. Параметры передаются по протоколу обмена (ПО 3) (υ°тек, γ°тек, ϕ°тек, Хтек, Zтек).
- с выхода блока навигационного вычислителя исходных данных (НВ ИД) 13 поступают параметры трехмерной программной траектории полета в земной системе координат: время полета на маршруте - Т, программно задаваемая дальность на маршруте (от точки определения текущих значений координат полета вертолета) - Хзад, программно задаваемая высота полета вертолета на маршруте - Yзад, программно задаваемое боковое отклонение полета вертолета - Zзад, программно задаваемая высота полета вертолета на исполнение команды «убрать шасси»/«выпустить шасси» - Ншас. Параметры передаются по протоколу обмена (ПО 4) (Т, Хзад, Yзад, Zзад, Ншас).
Одновременно эти же параметры трехмерной программной траектории полета в земной системе координат, дополненные инерционно-массовыми характеристиками Ixx, Iyy, Izz, Ixy, Ixz, Iyz для связанных осей системы координат вертолета, поступают на вход блока навигационного вычислителя расчетных данных (НВ РД) 14. Параметры передаются по протоколу обмена (ПО 5) (Т, Хзад, Yзад, Zзaд, Ншас, Ixx, Iyy, Izz, Ixy, Ixz, Iyz).
- с выхода блока навигационного вычислителя расчетных данных (НВ РД) 14 поступают на вход блока системы автоматического управления полетом (САУП) 10 (вычисленные по входным параметрам блока (НВ ИД) 13) дополнительно задаваемые параметры полета:
- в земной системе координат (ЗСК) oXgYgZg:
Vxg зад - проекции скорости на ось Xg;
Vyg зад - проекции скорости на ось Yg;
Vzg зад - проекции скорости на ось Zg;
Ψ°зад - программно задаваемый угол поворота траектории вертолета;
Θ°зад - программно задаваемый угол наклона траектории вертолета;
- в связанной с вертолетом системе координат oX1Y1Z1:
γ°зад - программно задаваемое угловое положение вертолета на траектории по углу крена,
υ°зад - программно задаваемое угловое положение вертолета на траектории по углу тангажа,
ϕ°зад - программно задаваемое угловое положение вертолета на траектории по углу рыскания.
Ixx - центральный момент инерции вдоль оси X1;
Iyy - центральный момент инерции вдоль оси Y1;
Izz - центральный момент инерции вдоль оси Z1;
Ixy - центробежный момент инерции в плоскости oX1Y1;
Ixz - центробежный момент инерции в плоскости oX1Z1;
Iyz - центробежный момент инерции в плоскости oY1Z1.
Параметры передаются по протоколу обмена (ПО 6) (Vxg зад, Vyg зад, Vzg зад, Ψ°зад, Θ°зад, γ°зад, υ°зад, ϕ°зад, Ixx, Iyy, Izz, Ixy, Ixz, Iyz).
На вход блока учета расхода в полете массы полезной нагрузки вертолета (например: топливо, грузы, боезапас) (РПН) 33 от основных систем вертолета поступают значения параметров расходуемой в полете массы полезной нагрузки вертолета: Mo (t, xm, ym, zm) - масса полезной нагрузки; где: (t) - время полета; (xm, ym, zm) - координаты центра масс полезной нагрузки в связанной с вертолетом системе координат.
- с выхода блока (РПН) 33 учета расхода в полете массы полезной нагрузки вертолета (например: топливо, грузы, боезапас) поступают параметры массы полезной нагрузки и ее координаты (изменяемые в полете) в связанной с вертолетом системе координат в блок (ЦМ) 32 вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значение параметра продольного расстояния от центра масс вертолета до оси несущего винта, в котором определяется текущая масса вертолета (Мв) и координаты текущего центра масс вертолета в связанной с вертолетом системе координат.
Мв (t, хв, ув, zв) - текущая масса вертолета
t - время полета;
хв, ув, zв - координаты текущего центра масс вертолета в связанной с вертолетом системе координат;
Iххв, Iуув, Izzв, Iхув, Ixzв, Iуzв - вычисленные в полете инерционно-массовые характеристиками для связанных осей системы координат вертолета;
Xт(t) - текущее значение продольного расстояния от центра масс вертолета до оси несущего винта.
ΔZ - смещение центра масс вертолета относительно его продольной плоскости симметрии (далее - «смещение центра масс»).
С первого выхода блока (ЦМ) 32 вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете, значение параметра продольного расстояния от центра масс вертолета до оси несущего винта и смещение центра масс вертолета относительно его продольной плоскости симметрии в блок (САУП) 10 системы автоматического управления полетом вычисляемые параметры передаются по протоколу обмена (ПО 7) (Мв, хв, ув, zв, Ixxв, Iуув, Izzв, Iхув, Ixzв, Iyzв, Xт(t), ΔZ).
Co второго выхода блока (ЦМ) 32 вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значение параметра продольного расстояния от центра масс вертолета до оси несущего винта на первый вход блока (ПС) 31 расчета прогнозируемой скорости полета вертолета передается параметр текущего значения Xт(t) текущее значение продольного расстояния от центра масс вертолета до оси несущего винта.
На вход блока (АС) 25 автопилота функций автоматической стабилизации через переключатель блоков (вАП) 23 автопилота функций автоматической стабилизации по тангажу, высоте, скорости при работе блока (САУП) 10 системы автоматического управления полетом в директорном режиме автоматического управления передаются: (υ°тек) - текущее значение угла тангажа; (Yтек) - текущее значение высоты полета вертолета; (Vтек) - текущее значение скорости полета вертолета; (γ°тек) - текущее значение угла крена и (Ψ°тек) - текущее значение угла поворота траектории (угол курса). Параметры передаются по протоколу обмена (ПО 8) (υ°тек, Yтек, Vтек, γ°тек, Ψ°тек).
С выхода блока (АС) 25 автопилота функций автоматической стабилизации в блок (САУП) 10 системы автоматического управления полетом в директорном режиме автоматического управления передаются рабочие переменные: (υ°зад) - программно задаваемое угловое положение вертолета на траектории по углу тангажа, (Yзад) - программно задаваемая высота полета вертолета на маршруте, (Vзад) - программно задаваемое значение скорости полета вертолета, (γ°зад) - программно задаваемое угловое положение вертолета на траектории по углу крена и (Ψ°зад) - программно задаваемый угол поворота траектории вертолета (заданное значение угла курса). Параметры передаются по протоколу обмена (ПО 9) (υ°зад, Yзад, Vзад, γ°зад, Ψ°зад).
С выхода блока автопилота функций автоматической стабилизации (АС) 25 на второй вход блока расчета прогнозируемой скорости полета вертолета (ПС) 31 через переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости (вАП) 23 при работе блока (САУП) 10 системы автоматического управления полетом в директорном режиме ручного управления поступает параметр υ°тек - текущее значение угла тангажа.
В блоке (САУП) 10 системы автоматического управления полетом на первый вход блока (НУ ТВ) 40 начальных условий траекторного вычислителя поступают изменяющиеся в полете параметры: текущей массы вертолета - Мв; текущие координаты пространственного положения центра масс вертолета в земной системе координат - Хтек, Yтек, Zтек; инерционно-массовыми характеристиками для связанных осей системы координат вертолета - Ixx, Iyy, Izz, Ixy, Ixz, Iyz; текущее значение продольного расстояния от центра масс вертолета до оси несущего винта Xт(t); смещением центра масс вертолета относительно его продольной плоскости симметрии - ΔZ; текущее значение скорости полета вертолета - Vтек; текущие проекции вектора угловой скорости - (ωх тек, ωy тек, ωz тек); текущее угловое положение вертолета - (υ°тек, ϕ°тек, γ°тек) - текущее значение угла тангажа, текущее значение угла рыскания, текущее значение угла крена; текущее угловое положение ВППл корабля равное текущему угловому положению корабля по углу дифферента - (υ°п=υ°к тек), углу рыскания (φ°п=ϕ°к тек) и углу крена - (γ°п=γ°к тек); текущее значение угла поворота траектории вертолета - (Ψ°тек); текущее значение угла наклона траектории вертолета - (Θ°тек); модуль текущего вектора средней скорости ветра (Wind); координаты точки траектории, к которой движется вертолет на программно задаваемом маршруте при заходе на посадку на ВППл корабля - (Хзад, Yзад, Zзад) - программно задаваемая дальность на маршруте, программно задаваемая высота полета вертолета на маршруте, программно задаваемое боковое отклонение полета вертолета. Параметры передаются по протоколу обмена (ПО 10) (Мв, Хтек, Yтек, Zтек, Ixx, Iyy, Izz, Ixy, Ixz, Iyz, Xт(t), Vтек, ωх тек, ωу тек, ωz тек, υ°тек, ϕ°тек, γ°тек, υ°п, γ°п, φ°п, Ψ°тек, Θ°тек, Wind, Хзад, Yзад, Zзад).
В блоке (САУП) 10 системы автоматического управления полетом на второй вход блока (НУ ТВ) 40 начальных условий траекторного вычислителя передаются значения неизменяющихся величин пространственного положения (N) стоек шасси в связанной с вертолетом системе координат - (L1, L2, …, Ln; n=1÷N); расстояние от центра масс корабля до центра ВППл корабля (ΔХп, ΔYп, ΔZп). Параметры передаются по протоколу обмена (ПО 11) ((L1, L2, …, Ln,), ΔХп, ΔYп, ΔZп).
С выхода блока начальных условий траекторного вычислителя (НУ ТВ) 40 на вход блока траекторного вычислителя (ТВ) 39 поступают параметры начальных условий интегрирования уравнений движения вертолета: текущая масса вертолета - (Мв); текущие координаты пространственного положения центра масс вертолета в земной системе координат - (Хтек, Yтек, Zтек); вычисленные инерционно-массовыми характеристиками для связанных осей системы координат вертолета - (Iххв, Iуув, Izzв, Iхув, Ixzв, Iуzв); текущее значение продольного расстояния от центра масс вертолета до оси несущего винта - (Xт(t)); смещением центра масс вертолета относительно его продольной плоскости симметрии - ΔZ;. проекции вектора текущей скорости полета вертолета - (Vтек (Vхтек, Vутек, Vzтек)); текущие проекции вектора угловой скорости - (ωхтек, ωутек, ωzтек); текущее угловое положение вертолета - (υ°тек, ϕ°тек, γ°тек) - текущее значение угла тангажа, текущее значение угла рыскания, текущее значение угла крена; текущее значение угла поворота траектории вертолета - (Ψ°тек); текущее значение угла наклона траектории вертолета - (Θ°тек); текущие горизонтальные проекции вектора средней скорости ветра в земной системе координат - Wind=f (Wxg, Wzg). где: Wind - модуль текущего вектора средней скорости ветра, Wxg, Wzg - горизонтальная проекция вектора средней скорости ветра (Wind) в земной системе координат; значения параметров вычисленных векторов прогнозируемых сил (R1, R2, … Rn) в земной системе координат, значения параметров вычисленных векторов прогнозируемых моментов в связанной системе координат (Мr1, Мr2, …, Мrn)); значения неизменяющихся величин пространственного положения (N) стоек шасси в связанной с вертолетом системе координат - (L1, L2, …, Ln; n=1÷N); текущее угловое положение ВППл корабля по углу дифферента - (υ°п), углу крена - (γ°п) и углу рыскания (φ°п); прогнозируемый коэффициент масштаба скорости полета ЛА (Кmv), расстояние от центра масс корабля до центра ВППл корабля (ΔХп, ΔYп, ΔZп). Параметры передаются по протоколу обмена (ПО 12) (Мтек, Хтек, Yтек, Zтек, Ixx, Iyy, Izz, Ixy, Ixz, Iyz, Хт(t), Vтек(Vхтек, Vутек, Vzтек), (ωхтек, ωутек, ωzтек), (υ°тек, ϕ°тек, γ°тек), Ψ°тек, Θ°тек, Wind=f(Wxg, Wzg), (R1, R2, … Rn), (Mr1, Mr2, …, Mrn), (L1, L2, … Ln,), υ°п, γ°п, φ°п, Kmv, ΔХп, ΔYп, ΔZп).
С выхода блока вычисления прогнозируемых сил и моментов, действующих на центр масс вертолета при сжатии упругих элементов стоек шасси (ПСМ) 30 на вход блока траекторного вычислителя (ТВ) 39 поступают значения параметров вычисленных векторов прогнозируемых сил (R1, R2, … Rn) в земной системе координат, значения параметров вычисленных векторов прогнозируемых моментов в связанной системе координат (Мr1, Мr2, …, Мrn) и прогнозируемое значение коэффициента масштаба скорости полета ЛА (Кmv). Параметры передаются по протоколу обмена (ПО 13) (R1, R2, …, Rn„ Mr1, Mr2, …, Mrn, Kmv).
С выхода блока траекторного вычислителя (ТВ) 39 на вход блока вычисления прогнозируемых сил и моментов, действующих на центр масс вертолета при сжатии упругих элементов стоек шасси (ПСМ) 30 поступает вычисленное прогнозируемое значение коэффициента масштаба скорости полета ЛА (Кmv), числовое значение которого есть функция величины сил сжатия упругих элементов стоек шасси. Параметры передаются по протоколу обмена (ПО 14) (Kmv).
С выхода блока траекторного вычислителя (ТВ) 39 на вход блока системы автоматического управления полетом вертолета (САУП) 10 поступает вычисленное прогнозируемое значение коэффициента масштаба скорости полета ЛА (Кmv), числовое значение которого есть функция величины сил сжатия упругих элементов стоек шасси. Параметры передаются по протоколу обмена (ПО 15) (Kmv).
Из блока системы автоматического управления полетом (САУП) 10 через переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте, скорости (вАП) 23 на вход блока навигационного вычислителя исходных данных (НВ ИД) 13 передаются параметры программно задаваемой точки на траектории полета вертолета: Т - время полета на маршруте; координаты точки траектории, к которой движется вертолет на программно задаваемом маршруте при заходе на посадку на ВППл корабля (Хзад, Yзад, Zзад), где - Хзад - программно задаваемая дальность на маршруте (от точки определения текущих значений координат полета вертолета), (Yзад) - программно задаваемая высота полета вертолета на маршруте, (Zзад) - программно задаваемое боковое отклонение полета вертолета, причем для первого участка траектории полета вертолета программно задаваемая высота полета вертолета на маршруте соответствует текущему значению высоты полета вертолета (Yзад=Yтек), для второго участка траектории полета вертолета программно задаваемая высота полета вертолета (Yзад=Ншас), соответствует (Ншас) - программно-задаваемой высоте полета вертолета на исполнение команды "убрать шасси/выпустить шасси"), (Vзад) - программно задаваемое значение скорости полета вертолета, (υ°тек) - текущее значение угла тангажа, вычисленные инерционно-массовыми характеристиками для связанных осей системы координат вертолета Iххв, Iуув, Izzв, Iхув, Ixzв, Iуzв. Параметры передаются по протоколу обмена (ПО 16) (Т, Хзад, Yзад, Zзад, Ншас, Vзад, υ°тек, Iххв, Iуув, Izzв, Iхув, Iхzв, Iуzв).
С выхода блока корабля, передающего параметры конуса посадки по каналу связи «корабль-вертолет» (КПК) 42, на вход приемника параметров пространственного положения конуса посадки (СКП) 27 передаются параметры конуса посадки: текущее время - t; проекции скорости корабля в земной системы координат - Vxк; Vzк; текущий угол курса корабля - ψ°к тек; модуль текущего вектора средней скорости ветра - W=Wind; направление ветра - U°wind; значения углов, обеспечивающих безопасный подход к точке зависания над ВППл корабля  значения угла глиссады -
значения угла глиссады -  расстояние от центра масс корабля до центра ВППл корабля (ΔХп, ΔYп, ΔZп); программно задаваемая высота полета вертолета на исполнение команды «убрать шасси»/«выпустить шасси» - Ншас; текущее угловое положение корабля - (υ°к тек, ϕ°к тек, γ°к тек) по углу дифферента, рыскания, крена; координаты центра масс корабля в земной системе координат (Xgк, Zgк). Параметры передаются по протоколу обмена (ПО 17) (t, Vx к, Vz к, ψ°к тек, W=Wind, U°wind,
расстояние от центра масс корабля до центра ВППл корабля (ΔХп, ΔYп, ΔZп); программно задаваемая высота полета вертолета на исполнение команды «убрать шасси»/«выпустить шасси» - Ншас; текущее угловое положение корабля - (υ°к тек, ϕ°к тек, γ°к тек) по углу дифферента, рыскания, крена; координаты центра масс корабля в земной системе координат (Xgк, Zgк). Параметры передаются по протоколу обмена (ПО 17) (t, Vx к, Vz к, ψ°к тек, W=Wind, U°wind, 
 (ΔХп, ΔYп, ΔZп), Ншас, (υ°к тек, ϕ°к тек, γ°к тек), (Xgк, Zgк)).
(ΔХп, ΔYп, ΔZп), Ншас, (υ°к тек, ϕ°к тек, γ°к тек), (Xgк, Zgк)).
Через включенный переключатель ввода данных параметров конуса посадки (В) 28, параметры протокола обмена (ПО 17) передаются на первый вход блока вычисления аналитических параметров конуса посадки (КП) 29.
Причем, при выключенном переключателе ввода данных параметров конуса посадки (В) 28 параметры протокола обмена (ПО 17) алгоритмом внутреннего языка программирования в блоке системы автоматического управления полетом (САУП) 10 - приравниваются к нулю. Алгоритм обнуления протокола обмена (ПО 17) не является целью нашего предложения.
На второй вход блока вычисления аналитических параметров конуса посадки (КП) 29 из блока системы автоматического управления полетом (САУП) 10 поступают координаты текущего положения центра масс вертолета в земной системе координат (Хтек, Yтек, Zтек).
С выхода блока вычисления аналитических параметров конуса посадки (КП) 29 в блок системы автоматического управления полетом (САУП) 10 поступают массивы числовых значений поверхности конуса посадки (Xr, Yr, Zr), массивы числовых значений образующей конуса посадки (Xf, Yf, Zf), вычисленные значения угла глиссады  и заданного направления вектора результирующего воздушного потока (U°рез). Координаты конечной точки участка траектории полета, к которой движется вертолет при полете на ВППл корабля (Хзад, Yзад, Zзад), где - Хзад - программно задаваемая дальность на маршруте (от точки определения текущих значений координат полета вертолета), Yзад - программно задаваемая высота полета вертолета на маршруте, Zзад - программно задаваемое боковое отклонение полета вертолета. Параметры передаются в блок системы автоматического управления полетом (САУП) 10 по протоколу обмена (ПО 18) ((Xr, Yr, Zr), (Xf, Yf, Zf),
и заданного направления вектора результирующего воздушного потока (U°рез). Координаты конечной точки участка траектории полета, к которой движется вертолет при полете на ВППл корабля (Хзад, Yзад, Zзад), где - Хзад - программно задаваемая дальность на маршруте (от точки определения текущих значений координат полета вертолета), Yзад - программно задаваемая высота полета вертолета на маршруте, Zзад - программно задаваемое боковое отклонение полета вертолета. Параметры передаются в блок системы автоматического управления полетом (САУП) 10 по протоколу обмена (ПО 18) ((Xr, Yr, Zr), (Xf, Yf, Zf),  U°рез, (Хзад, Yзад, Zзад)).
U°рез, (Хзад, Yзад, Zзад)).
Работа командно-пилотажного индикатора начинается с того, что летчик при подготовке к полету, устанавливает переключатель ввода исходных данных параметров программной трехмерной траектории полета вертолета (В) 34 в положение «ввод исходных данных параметров программной трехмерной траектории полета вертолета». В блок навигационного вычислителя исходных данных (НВ ИД) 13 летчик вводит параметры программной трехмерной траектории полета и инерционно-массовые характеристики вертолета, подготовленные к обработке в пространстве земной системы координат. После ввода исходных данных, летчик переводит переключатель ввода исходных данных параметров программной трехмерной траектории полета вертолета (В) 34 (фиг. 1) в положение, которое соответствует команде «ввод данных прекращен». По этой команде на вход блока навигационного вычислителя расчетных данных (НВ РД) 14 поступают все исходные данные параметров программной трехмерной траектории полета вертолета и инерционно-массовые характеристики вертолета с выхода блока навигационного вычислителя исходных данных (НВ ИД) 13. В блоке навигационного вычислителя расчетных данных (НВ РД) 14 исходные данные параметров трехмерной программной траектории полета и инерционно-массовые характеристики вертолета пересчитываются в дополнительно задаваемые параметры полета вертолета, которые необходимы для движения в директорном режиме автоматического управления полетом вертолета и для работы блока системы автоматического управления полетом (САУП) 10. На маршруте полета в директорном режиме автоматического управления полетом (фиг. 1) на вход блока системы автоматического управления полетом (САУП) 10 постоянно поступают сигналы с выходов основных систем вертолета таких, как блок системы воздушных сигналов (СВС) 11, блок инерциальной навигационной системы (ИНС) 12, блок навигационного вычислителя исходных данных (НВ ИД) 13, блок навигационного вычислителя расчетных данных (НВ РД) 14, блок учета расхода в полете массы полезной нагрузки вертолета (РПН) 33, блок вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значение параметра продольного расстояния от центра масс вертолета до оси несущего винта (ЦМ) 32. Рабочие параметры блока (ЦМ) 32: инерционно-массовые характеристики - Ixx, Iyy, Izz, Ixy, Ixz, Iyz, масса полезной нагрузки и координаты центра масс полезной нагрузки - Mo, xm, ym, zm в текущий момент времени (t) используются в блоке системы автоматического управления полетом (САУП) 10 для управления полетом вертолета. С выхода блока системы автоматического управления полетом (САУП) 10 параметры поступают в блок командно-пилотажного индикатора (КПИ) 9, где в блоке генератора символов (ГС) 15 преобразуются в управляющие индексы параметров полета и выводятся на экран (1). По визуальной информации летчик контролирует полет в директорном режиме автоматического управления полетом по индексам «Лидер» 4 и «Самолет» 5, а также навигационным приборам, визуализирующим параметры полета на маршруте от взлета с ВППл корабля в направлении пункта выполнения полетного задания: координаты пункта выполнения задания, указатель вертикальной скорости и другие. Выполнив полетное задание и возвращаясь на корабль, летчик устанавливает желаемую для него скорость полета на горизонтальном участке траектории. Для этого летчик выполняет следующие действия: - переключатель ввода данных параметров конуса посадки (В) 28 переводит в положение «ввод данных параметров конуса посадки»; - обращает внимание на указатель скорости полета вертолета (УС) 37, на котором отмечено числовое значение текущей скорости полета вертолета. Летчик переключателем блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости (вАП) 23, (фиг. 1) отключает в блоке автопилота функций автоматической стабилизации (АС) 25 блок автопилота функции стабилизации по тангажу (Aυ), блок автопилота функции стабилизации по высоте (Ан) и блок автопилота функции стабилизации по скорости (Av). Тем самым летчик переводит систему управления вертолетом в директорный режим ручного управления полетом по углу тангажа, высоте и скорости полета, не отключая работу других основных систем вертолета. В следующий момент летчик органами управления (ОУ) 24 изменяет угол тангажа, тем самым изменяя величину скорости полета вертолета. Этот маневр фиксируется основными системами вертолета и в параметрическом виде (через протоколы обмена) передается в блок системы автоматического управления полетом (САУП) 10. Из протокола обмена данных, поступающих с выхода блока инерциальной навигационной системы (ИНС) 12, выбирается только один параметр - (υ°тек), который передается на вход блока расчета прогнозируемой скорости полета вертолета (ПС) 31. На другой вход блока расчета прогнозируемой скорости полета вертолета (ПС) 31 постоянно поступает значение параметра (Xт(t)) продольного расстояния от центра масс вертолета до оси несущего винта. В блоке расчета прогнозируемой скорости полета вертолета (ПС) 31 по аналитическим формулам вычисляется числовое значение функциональной зависимости прогнозируемой скорости полета вертолета для горизонтального участка маршрута. Изменение летчиком угла тангажа вертолета осуществляется до тех пор, пока индекс указателя заданной скорости полета вертолета не установится на шкале прибора указателя скорости полета вертолета (УС) 37 на новое цифровое значение заданной скорости полета для горизонтального участка маршрута. В этот момент времени летчик переключателем блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости (вАП) 23 (фиг. 1) включает в работу в блоке автопилота функций автоматической стабилизации (АС) 25 блок автопилота (26) функции стабилизации по тангажу (Аυ), по высоте (Ан), по скорости (Аv), по крену (Аγ), по курсу (АΨ°). Тем самым летчик возвращает систему управления вертолетом в директорный режим автоматического управления полетом с новыми параметрами стабилизации по углу тангажа, высоте и скорости полета. Прогнозируемая скорость полета вертолета в директорном режиме автоматического управления полетом является стабилизируемым параметром в блоке автопилота функции стабилизации по скорости (Av). Как результат этих действий на экране командно-пилотажного индикатора (1) летчик увидит на индикационном поле (3) экрана (1) изменившуюся фигуру «Лидера» 4, соответствующую (Vзад), а на навигационном поле (2) экрана (1) указатель скорости полета вертолета (УС) 37, на котором стрелками указаны числовые значения индекса указателя текущей скорости полета вертолета (Vтек) и числовые значения индекса указателя заданной (прогнозируемой) скорости полета вертолета (Vзад). В момент перехода на директорный режим автоматического управления полетом (переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте, скорости (вАП) 23 переведен в положение «0-2»), из протоколов обмена текущих выходных параметров полета с выхода блока системы автоматического управления полетом (САУП) 10 выбирается последний протокол обмена текущих значений выходных параметров полета и параметры конуса посадки:
- время полета на маршруте - Т;
- текущее значение дальности полета вертолета - Хтек,
- текущее значение высоты полета вертолета - Yтек;
- текущее боковое отклонении вертолета - Zтек;
- программно задаваемая высота полета вертолета на исполнение команды «убрать шасси»/«выпустить шасси» - Ншас.
- заданная скорость полета вертолета Vзад;
- текущее значение угла тангажа - υ°тек;
- инерционно-массовые характеристики Ixx, Iyy, Izz, Ixy, Ixz, Iyz для связанных осей вертолета.
Установив заданную (прогнозируемую) скорость полета вертолета (Vзад) для горизонтального участка траектории, летчик переводит переключатель ввода данных параметров конуса посадки (В) 28 в положение «приема параметров конуса посадки» (фиг. 12). Тем самым летчик включает бортовой вычислитель конуса посадки, в состав которого входят: приемник параметров пространственного положения конуса посадки (СКП) 27; блок вычисления аналитических параметров конуса посадки (КП) 29; - блок начальных условий траекторного вычислителя (НУ ТВ) 40; блок траекторного вычислителя (ТВ) 39; блок вычисления прогнозируемых сил и моментов, действующих на центр масс вертолета при сжатии упругих элементов стоек шасси (ПСМ) 30.
Работа бортового вычислителя конуса посадки помогает летчику контролировать заход и посадку в сложных метеоусловиях на ВППл корабля, а для этого необходимо знать: изменяющиеся во времени пространственные координаты корабля, скорость корабля, направление и скорость ветра, выдерживать заданный угол глиссады при посадке на ВППл корабля в штормовом море, что является сложной и психологически напряженной работой. Поэтому в бортовом вычислителе конуса посадки предлагается ввести и использовать следующие системы координат:
Земная система (фиг. 4) координат (OgXgYgZg) с центром в точке (Og). Ось (OgYg) - направлена перпендикулярно вверх, ось (OgXg) - ориентирована в заданном направлении (условно на север), ось (OgZg) перпендикулярна оси (OgXg) и образует правую систему координат.
Корабельная система (фиг. 4) координат (OкXкYкZк). Центр системы координат (Ок) расположен в центре масс корабля. Ось (ОкХк) - направлена вдоль продольной оси корабля, ось (ОкYк) - направлена вверх перпендикулярно оси (ОкХк) и располагается в продольной плоскости симметрии корабля, ось (OкZк) перпендикулярна оси (ОкХк) и образует правую систему координат.
Система координат (фиг. 4) связанная с ВППл корабля (OпXпYпZп). Центр системы координат (Оп) расположен в центре ВППл корабля. Ось (ОпХп) - линия пересечения плоскости ВППл корабля и плоскости продольной симметрии корабля, направление совпадает с направлением продольной оси корабля (ОкХк). Ось (OпYп) - направлена вверх перпендикулярно плоскости ВППл корабля и перпендикулярна оси (ОпХп) и располагается в продольной плоскости симметрии корабля. Ось (OпZп) перпендикулярна оси (ОпХп) и образует правую систему координат.
Пространственное положение (фиг, 4) системы координат связанной с ВППл корабля (OпXпYпZп) относительно корабельной системы координат (OкXкYкZк) определяется расстоянием от центра масс корабля (Ок), до центра ВППл корабля (ΔХп, ΔYп, ΔZп), соответственно, вдоль продольной оси (Хк), вдоль вертикальной оси (Yк) и вдоль оси (Zк).
На фигуре 5 представлены взаимное угловое положение корабельной системы координат (OкXкYкZк) и системы координат связанной с ВППл корабля (OпXпYпZп) относительно земной системы координат (OgXgYgZg), связь между которыми определяется углом крена корабля (γ°к), углом дифферента корабля (υ°к) и углом рыскания корабля (φ°к).
Система координат конуса посадки вертолета (OкпXкпYкпZкп) (фиг. 6), в которой строится виртуальная геометрическая фигура прямого кругового конуса - конуса посадки. Начало системы координат конуса посадки вертолета (вершина конуса посадки) - точка (Окп) смещено относительно центра масс корабля вдоль продольной оси (ОкХк) корабля в сторону ВППл на величину (ΔХп) и поднято на программно-задаваемую высоту полета вертолета на исполнение команды "убрать шасси/выпустить шасси" (Ншас) и располагается в горизонтальной плоскости (XкпOкпZкп) параллельной горизонтальной плоскости земной системы координат (XgOgZg). Продольная ось (ОкпХкп) лежит в горизонтальной плоскости (XкпOкпZкп) параллельной плоскости земной системы координат (XgOgZg). Направление оси (ОкпХкп) совпадает с направлением проекции оси (ОкХк) корабельной системы координат на плоскость (OкпXкпZкп). Ось (ОкпYкп) параллельна оси земной системы координат (OgYg) и перпендикулярна плоскости (XкпOкпZкп). Ось (OкпZкп) лежит в плоскости (XкпOкпZкп) параллельной плоскости земной системы координат (XgOgZg) и перпендикулярна оси (ОкпХкп), образуя правую систему координат. В системе координат конуса посадки (ОкпХкпYкпZкп) выделено пространство ограниченное плоскостями (YкпOкпF1) и (YкпOкпF2) расположенными под углом  и углом
и углом  соответственно, и плоскостью (XкпOкпZкп), которое определяет пространство над ВППл корабля, в которой летчик при заходе на посадку избежит столкновения вертолета с надстройками корабля. Образующая боковой поверхности конуса посадки с горизонтальной плоскостью (XкпOкпZкп) образует угол равный углу глиссады.
соответственно, и плоскостью (XкпOкпZкп), которое определяет пространство над ВППл корабля, в которой летчик при заходе на посадку избежит столкновения вертолета с надстройками корабля. Образующая боковой поверхности конуса посадки с горизонтальной плоскостью (XкпOкпZкп) образует угол равный углу глиссады.
На фигуре 7 представлен графический способ вычисления в земной системе координат (OgXgYgZg) вектора результирующей скорости воздушного потока (Vрез), который расположен в плоскости (XgOgZg) и равен сумме векторов: вектора скорости корабля взятой с обратным знаком (-Vк) и вектора скорости ветра (W=Wind) с учетом направления ветра (U°wind). Вектор скорости результирующего воздушного потока (Vрез) в системе координат (OкXкYкZк) образует с осью (ХкОк) курсовой угол результирующего воздушного потока (U°рез).
На фигуре 8 в корабельной системы координат (OкXкYкZк) изображена в системе координат конуса посадки пространственная геометрическая фигура, являющаяся частью прямого кругового конуса, ограниченная углами (+ξ°) и (-ξ°), в которой летчик, при заходе в точку зависания (Окп) над ВППл корабля, избежит столкновений с надстройками корабля. Заданный курсовой угол результирующего воздушного потока (U°рез) находится между углом  и углом
и углом 
 Плоскость, проходящая через ось (ОкпYкп) и курсовой угол результирующего воздушного потока (U°рез) пересекает поверхность прямого кругового конуса посадки по образующей конуса, которая с плоскостью (XкпOкпZкп) составляет угол глиссады
Плоскость, проходящая через ось (ОкпYкп) и курсовой угол результирующего воздушного потока (U°рез) пересекает поверхность прямого кругового конуса посадки по образующей конуса, которая с плоскостью (XкпOкпZкп) составляет угол глиссады  На фигуре 8 показано, что любая другая плоскость, проходящая через ось (ОкпYкп) будет пересекать поверхность прямого кругового конуса посадки по образующей конуса и, следовательно, под углом глиссады
На фигуре 8 показано, что любая другая плоскость, проходящая через ось (ОкпYкп) будет пересекать поверхность прямого кругового конуса посадки по образующей конуса и, следовательно, под углом глиссады
На фигуре 9 представлены: земная система координат (XgOgZg), корабельная система координат (OкXкYкZк), система координат конуса посадки вертолета (ОкпХкпYкпZкп), центр масс корабля (Ок) и координаты вершины конуса посадки (Окп). Вектор скорости корабля (Vк) совпадает с осью (ОкХк) корабельной системы координат. Вдоль оси (OкYк) корабельной системы координат отсчитывается расстояние от центра масс корабля до центра ВППл корабля - (ΔY). Высота полета вертолета при заходе на посадку на ВППл корабля отсчитывается от плоскости (XgOgZg) земной системы координат - (Yтек). Расстояние от плоскости (XgOgZg) земной системы координат до вершины (Окп) конуса посадки - (Ншас). Позицией (Врт) обозначено положение вертолета в пространстве земной системы координат. Вертолет выполняет полет в сторону ВППл корабля со скоростью (Vтек) под курсовым углом (Ψ°тек). Позицией точки (A(Xa, Ya, Za)) обозначена точка пересечения образующей конуса посадки и горизонтальной плоскости на уровне текущей высоты полета вертолета (Врт(Хтек, Yтек=Yзад, Zтек)). Проекция линии (Окп А Врт) на горизонтальную плоскость совпадает с направлением курсового угла результирующего воздушного потока (U°рез). Отрезок прямой (ВртА) в пространстве земной системы координат от точки (Врт(Хтек, Yтек, Zтек)) до точки (A(Xa, Ya, Za)) - траектории горизонтального полета вертолета обозначен как «участок №1» с курсовым углом результирующего воздушного потока (U°рез). Отрезок прямой от точки (A(Xa, Ya, Za)) до точки вершины конуса посадки (Oкп(Xf(1), Yf(1)=Ншас, Zf(1)) обозначен как «участок №2» с углом глиссады  и курсовым углом результирующего воздушного потока (U°рез).
и курсовым углом результирующего воздушного потока (U°рез).
На фигуре 10 представлены, стилизованное изображение корабля в исходном положении, земная система координат (OgXgYgZg) с центром (Og); корабельная система координат (OкXкYкZк) с центром (Ок); система координат связанная с ВППл корабля (OпXпYпZп) с центром (Оп); система координат конуса посадки (OкпXкпYкпZкп) с центром (Окп) расположенная на расстоянии ((Нкп=Hшас)>Yп), отсчитываемом от горизонтальной плоскости земной системы координат (XgOgZg), которая проецируется прямой линией (OgZg) на плоскость листа. В системе координат конуса посадки (OкпXкпYкпZкп) изображена проекция геометрической фигуры прямого кругового конуса посадки с вершиной в начале системы координат (Окп). Высота геометрической фигуры прямого кругового конуса посадки ограничена высотой от (Ншас) до (Yтек), где (Ншас) - начальная высота конуса посадки - программно задаваемая высота полета вертолета на исполнение команды «убрать шасси»/«выпустить шасси»; (Yтек) - конечная высота конуса посадки (численно равная текущей высоте полета вертолета). Точкой («Врт») обозначено положение вертолета.
На фигуре 11 представлены, стилизованное изображение корабля в измененном положении, земная система координат (OgXgYgZg) с центром (Og); корабельная система координат (OкXкYкZк) с центром (Ок); система координат связанная с ВППл корабля (OпXпYпZп) с центром (Оп); система координат конуса посадки (OкпXкпYкпZкп) с центром (Окп), система координат конуса посадки (OкпXкпYкпZкп). На фигуре 11 видно, что земная система координат (OgXgYgZg) и система координат конуса посадки (OкпXкпYкпZкп) не изменили свое исходное пространственное и угловое положение, а корабельная система координат (OкXкYкZк) с центром (Ок) и система координат, связанная с ВППл корабля (OпXпYпZп) с центром (Оп), имеют одно угловое отклонение относительно земной системы координат (OgXgYgZg) по углу крена корабля (γ°к), но разное пространственное отклонение относительно оси (OgYg) земной системы координат (OgXgYgZg). Углами (+ξ°) и (-ξ°), определяется пространство над ВППл корабля, в котором летчик, пилотируя вертолет, избежит столкновений с надстройками корабля  где (U°рез) - заданный курсовой угол результирующего воздушного потока. Точкой (Врт) обозначено положение вертолета.
где (U°рез) - заданный курсовой угол результирующего воздушного потока. Точкой (Врт) обозначено положение вертолета.
При включенном бортовом вычислителе (фиг. 12) на борт вертолета от блока корабля, передающего по протоколу обмена (ПО 16) параметры конуса посадки по каналу связи «корабль-вертолет» (КПК) 42 с выхода работающего приемника параметров пространственного положения конуса посадки (СКП) 27 на первый вход блока вычисления аналитических параметров конуса посадки (КП) 29 поступают параметры конуса посадки,
- текущее время - t;
- проекции скорости корабля в земной системы координат - Vxк; Vzк;
- текущий угол курса корабля - ψ°к тек;
- модуль текущего вектора средней скорости ветра - W=Wind;
- направление ветра - U°wind;
- значения углов, обеспечивающих безопасный подход к точке зависания над ВППл корабля (+ξ°, -ξ°);
- значения угла глиссады - 
- расстояние от центра масс корабля до центра ВППл корабля (ΔХп, ΔYп, ΔZп);
- программно задаваемая высота полета вертолета на исполнение команды «убрать шасси»/«выпустить шасси» - Ншас;
- текущее угловое положение корабля - (υ°к тек, ϕ°к тек, γ°к тек) по углу дифферента, рыскания, крена;
- координаты центра масс корабля в земной системе координат (Xgк, Zgк).
Одновременно второй вход блока вычисления аналитических параметров конуса посадки (КП) 29 соединен с блоком системы автоматического управления полетом (САУП) 10 по параметрам координат текущего положения центра масс вертолета в земной системе координат (Хтек, Yтек, Zтек).
В результате математических операций (фиг. 12) в блоке вычисления аналитических параметров конуса посадки (КП) 29 вычисляются:
В операторе №1 координаты (Окп) вершины конуса посадки вертолета над ВППл корабля, в земной системе координат.
В операторе №2 вычисляется курсовой угол результирующего воздушного потока (U°рез).
В операторе №3 вычисляется массив числовых значений поверхности конуса посадки (Xr, Yr, Zr).
В операторе №4 вычисляется массив числовых значений образующей конуса посадки (Xf, Yf, Zf).
В операторе №5 вычисляются координаты точки (А) на линии пересечения образующей конуса посадки (АОкп) и горизонтальной плоскости на уровне текущей высоты полета вертолета (Врт(Хтек, Yтек=Yзад, Zтек)).

и координаты вершины конуса посадки вертолета (Окп) над центром ВППл корабля, в земной системе координат (Oкп)=(Xf(1), Yf(1), Zf(1));
По вычисленным параметрам аналитически строится задаваемая траектория полета вертолета на горизонтальном участке (участок №1) и траектория полета вертолета по глиссаде (участок №2).
Траектория (участок №1) горизонтального участка полета от точки (Врт(Хтек, Yтек, Zтек)) до точки A(Xa, Ya, Za). Координаты точки A(Xa, Ya, Za) - это задаваемые координаты полета для горизонтального участка траектории (фиг. 9. фиг. 12 оператор 5) А(Хзад=Ха, Yзад=Yа, Zзад=Za).
Траектория (участок №2) полета по глиссаде по линии образующей конуса посадки от точки А(Ха, Ya, Za) до точки (Окп) вершина конуса посадки над центром ВППл корабля. Координаты точки Oкп(Xf(1), Yf(1), Zf(1)) - это задаваемые координаты полета (Хзад=Хf(1), Yзад=Yf(1), Zзад=Zf(1)) по линии образующей конуса посадки.
Вычисленные параметры из блока вычисления аналитических параметров конуса посадки (КП) 29 поступают (фиг. 12) в блок системы автоматического управления полетом (САУП) 10.
В блоке системы автоматического управления полетом (САУП) 10 на первый вход (фиг. 1) блока начальных условий траекторного вычислителя (НУ ТВ) 40 поступают изменяющиеся во время полета параметры: текущая масса вертолета, координаты текущего положения центра масс вертолета в земной системе координат, инерционно-массовые характеристики для связанных осей системы координат вертолета, текущее значение продольного расстояния от центра масс вертолета до оси несущего винта Хт(t), текущее значение скорости полета вертолета, текущие проекции вектора угловой скорости, текущее угловое положение вертолета (угол тангажа, рыскания, крена), текущее угловое положение ВППл корабля (равное текущему угловому положению корабля по углу дифферента, рыскания, крена), текущее значение угла поворота траектории вертолета, текущее значение угла наклона траектории вертолета, модуль текущего вектора средней скорости ветра, координаты точки траектории, к которой движется вертолет на программно-задаваемом маршруте (участок №1, участок №2) при заходе на посадку: - программно задаваемая дальность на маршруте (Хзад), - программно задаваемая высота полета вертолета на маршруте (Yзад), - программно задаваемое боковое отклонение полета вертолета (Zзад) в соответствии с протоколом обмена (ПО-10), а на второй вход блока (НУ ТВ) 40 начальных условий траекторного вычислителя поступают неизменяющиеся параметры: пространственное положение (N) стоек шасси в связанной с вертолетом системе координат и координаты центра ВППл корабля (ΔХп, ΔYп, ΔZп) относительно центра масс корабля, в соответствии с протоколом обмена (ПО 11).
В блоке начальных условий траекторного вычислителя (НУ ТВ) 40 поступившие параметры по протоколам обмена (ПО 10, ПО 11) преобразуются в начальные условия. Причем параметрам начальных условий: вычисляемых векторов прогнозируемых сил и вычисляемых векторов прогнозируемых моментов присваивается нулевое значение. Начальному значению прогнозируемого коэффициента масштаба скорости полета ЛА присваивается значение равное единице (Kmv=1). Прогнозируемый коэффициент масштаба скорости полета ЛА - это параметр, который позволяет на втором участке траектории (участок №2) изменять величину заданной скорости полета вертолета (Vзад=Vзад*Kmv), что важно при решении задачи совместного пространственного движения вертолета и пространственного движения ВППл корабля, чтобы исключить возможные запредельные значения динамических параметров на стойках шасси, вызывающие катастрофические последствия в виде поломанных стоек шасси или схлестывания лопастей несущего винта.
С выхода блока начальных условий траекторного вычислителя (НУ ТВ) 40 сформированный массив начальных условий поступает (фигура 13) по протоколу обмена (ПО 12) на вход блока траекторного вычислителя (ТВ) 39 для решения системы дифференциальных уравнений совместного пространственного движения ВППл корабля и пространственного движения вертолета (далее по тексту «система дифференциальных уравнений»). Динамические параметры полета вертолета на первом участке будут вычисляться до тех пор, пока длина первого участка №1 траектории будет больше наперед заданной величины (дальность заданной пространственной траектории полета вертолета на прямолинейном горизонтальном участку №1, обозначена на фигуре 9, как (Su)) (Su>ΔS), где (ΔS - наперед заданная величина алгоритма траекторного вычислителя конуса посадки). Если длина участка №1 горизонтальной траектории полета вертолета от точки (Врт) до точки (А) меньше наперед заданной величины (Su<ΔS), то из блока вычисления аналитических параметров конуса посадки (КП) 29 в блок системы автоматического управления полетом (САУП) 10 будут поступать параметры второго участка №2 (фиг. 9) траектории полета вертолета от точки (А) - конца горизонтального участка траектории полета (Хзад=Хf(Yтек), Yзад=Yтек, Zзад=Zf(Yтек)) до точки вершины конуса посадки, в которой заканчивается заданная траектория полета вертолета по глиссаде (Окп (Хзад=Хf(1),Yзад=Yf(1), Zзад=Zf(1))) на ВППл корабля. Точка «Окп» - вершина конуса посадки, (фигура 10, фигура 11) для корабля изменяющего свое пространственное и угловое положение, будет располагаться на программно-задаваемой высоте полета вертолета на исполнение команды «убрать шасси»/«выпустить шасси» на траектории движения центра масс корабля в земной системе координат над центром ВППл корабля (Нкп=Ншас). Так как система координат конуса посадки (OкпXкпYкпZкп) не изменяет свое пространственное положение во время качки корабля относительно земной системы координат (OgXgYgZg), то, следовательно, полученные в блоке вычисления аналитических параметров конуса посадки (КП) 29, пространственные координаты массива числовых значений образующей конуса посадки (Xf, Yf, Zf), так же не зависят от пространственного положения корабля во время качки. При полете по глиссаде (участок №2) в режиме ручного или автоматического управления, главное для летчика является прогнозируемая безопасная посадка вертолета на ВППл корабля, при которой исключаются запредельные динамические нагрузки на стойках шасси.
Для этого в блоке траекторного вычислителя (ТВ) 39 по входным параметрам текущих значений угла тангажа, рыскания и крена вертолета (υ°тек, ϕ°тек, γ°тек), составляется матрица перехода от связанной системы координат вертолета к земной системе координат,
По углу крена корабля (γ°к), углу дифферента корабля (υ°к) и углу рыскания корабля (φ°к) строится матрица перехода от земной системы координат (OgXgYgZg) к корабельной системе координат (OкXкYкZк) и от земной системы координат к системе координат связанной с плоскостью ВППл корабля (OпXпYпZп) с пересчетом на пространственное положение расстояния от центра масс корабля до центра ВППл корабля (ΔХп, ΔYп, ΔZп) относительно корабельной системы координат (OкXкYкZк).
Координаты неизменяющихся величин пространственного положения (N) стоек шасси в связанной с вертолетом системе координат пересчитываются в координаты земной системы координат и проецируются на ВППл корабля. Затем (фиг. 13) в земной системе координат вычисляется величина разности (ΔНпр) (далее по тексту «величина разности (ΔНпр)») равная (ΔНпр=(Ншасси-Нвппл)) для всех стоек шасси, где: (Ншасси) - прогнозируемое пространственное положение колеса стойки шасси, (Нвппл) - координата проекции прогнозируемого пространственного положения колеса стойки шасси на ВППл корабля. В блоке траекторного вычислителя (ТВ) 39 до контакта стойки шасси с ВППл корабля (фиг. 13), величина разности считается положительной (ΔНпр>0), поэтому при решении системы дифференциальных уравнений для данного момента времени не прогнозируются запредельные значения динамических параметров на стойках шасси. В блоке траекторного вычислителя (ТВ) 39 идентификаторам, обозначающим силу реакции от сжатия упругих элементов стоек шасси (R=0), и идентификаторам, обозначающим момент от силы реакции (Мr=0), сохраняются значения равные нулю, а прогнозируемому коэффициенту масштаба скорости полета ЛА сохраняется значение равное единице (Кmv=1).
Если величина разности (ΔНпр) станет равной нулю или величиной отрицательная (ΔНпр≤0) (фиг. 13),, что соответствует началу сжатия или продолжению сжатия упругих элементов стоек шасси, то из блока траекторного вычислителя (ТВ) 39, вызывается блок вычисления прогнозируемых сил и моментов, действующих на центр масс вертолета при сжатии упругих элементов стоек шасси (ПСМ) 30 с параметром абсолютной величиной разности (abs(ΔНпр)), по которой вычисляется сила реакции от сжатия упругих элементов стойки шасси (R≥0), как функция эмпирической зависимости (R=f(abs(ΔНпр))). По вычисленному значению силы реакции от сжатии упругих элементов стоек шасси (R≥0) и числовому значению вектора пространственного положения стойки шасси в связанной с вертолетом системе координат (L), вычисляется вектор момента силы реакции от сжатия упругих элементов стойки шасси (Mr=L*R). Абсолютное значение величины разности (abs(ΔНпр)) сравнивается с величиной предельного сжатия упругого элемента стойки шасси (ΔНпред) (фиг. 13), при которой возможны запредельные значения динамических параметров на стойках шасси. Величина сравнения, (ΔSпред) - это разность предельного сжатия упругого элемента стойки шасси (ΔНпред) и абсолютной величины разности (abs(ΔНпр)). Величина сравнения (фиг. 13) (ΔSпред=(ΔНпред-(aвs(ΔНпр)))) передается на логический оператор. Если величина сравнения равна нулю или отрицательна (ΔSпред≤0), то прогнозируются запредельные значения динамических параметров на стойках шасси, при которых возможен динамический удар, вызывающий катастрофические последствия, поэтому прогнозируемому коэффициенту масштаба скорости полета ЛА (Кmv) присваивается числовое значение не равное «единице», как пример, «1.20» (Кmv≈1.20). Вычисленные прогнозируемые значения силы реакции (R≥0) от сжатия упругих элементов стоек шасси, прогнозируемые значения момента от силы реакции (Mr≥0) и прогнозируемое значение коэффициента масштаба скорости полета ЛА (Кmv≈1.20), формируются в протокол обмена (ПО 13) (R, Mr, Kmv) и передаются в блок траекторного вычислителя (ТВ) 39, где при решении системы дифференциальных уравнений совместного пространственного движения ВППл корабля и пространственного движения вертолета прогнозируется угловое и пространственное положение вертолета, сила несущего винта и другие динамические параметры, влияющие на пространственное движение вертолета. Одновременно с выхода блока траекторного вычислителя (ТВ) 39 прогнозируемое значение коэффициента масштаба скорости полета ЛА (Кmv≈1.20) передается в блок системы автоматического управления полетом (САУП) 10, где значение заданной скорости полета вертолета (Vзад) корректируется на величину прогнозируемого значения коэффициента масштаба скорости полета ЛА (Кmv) (Vзад=Vзад*(Кmv≈1.20)) и передается на вход блока вычисления коэффициента скорости полета вертолета (mV) 19, как следствие, на индикационном поле (3) экрана (1) масштаб индекса "Лидер" (4) увеличится, что привлечет внимание летчика. Летчик своевременно уменьшит скорость снижения (Vy) по образующей конуса посадки (Xf, Yf, Zf), для того, чтобы дождаться изменения фазы качания ВППл корабля, при которой будет гарантирована безопасная посадка вертолета. На следующих шагах интегрирования системы дифференциальных уравнений, вычисленные параметры в блоке траекторного вычислителя (ТВ) 39 принимаются как начальные значения.
Таким образом, когда летчик на втором участке №2 траектории движется, по образующей конуса посадки в точку зависания над ВППл корабля «Окп», в бортовом вычислителе конуса посадки прогнозируется динамический процесс посадки вертолета на качающуюся плоскость корабля с учетом пространственного и углового положения вертолета. Летчик любой квалификации имеет возможность в сложных метеоусловиях оценить процесс посадки вертолета на качающуюся плоскость корабля и управлять процессом посадки с минимальной затратой нервной энергии и максимальной гарантией безопасности полета.
На фигурах (14-17) графически представлен процесс вычисления посадки вертолета на ВППл корабля в бортовом вычислителе. Для наглядного представления алгоритма посадки вертолета на ВППл корабля приняты обозначения: - связанная с вертолетом система координат OX1Y1Z1,
- ось ОХ1 (не показана) направлена от зрителя, перпендикулярно плоскости листа;
- ось (OY1) перпендикулярна оси (ОХ1) связанной с системой координат вертолета (находится в продольной плоскости симметрии вертолета перпендикулярной плоскости листа);
- конструктивная ось вала двигателя (OYδ);
- смещение центра масс вертолета относительно его продольной плоскости симметрии (ΔZ);
- угол отклонения (δ°>0) конструктивной оси вала двигателя от продольной плоскости симметрии вертолета (OY1);
- телесный угол запаса управления вектором тяги (η°);
- вертикальная скорость снижения вертолета (Vy);
- центр масс вертолета (О);
- сила веса вертолета (Р) где: (P=Mв*g; Мв - текущая масса вертолета, g - ускорение свободного падания);
- сила тяги несущего винта (Т);
- боковая составляющая силы тяги несущего винта (Tz);
- вертикальная составляющая силы тяги несущего винта (Ту);
- сила реакции от сжатия упругих элементов стойки шасси при контакте колеса стойки шасси с ВППл корабля (R) и момент от силы реакции (Mr);
- величина момента от боковой составляющей силы тяги несущего винта (Mтz);
- точка касание колесом ВППл корабля (К);
- текущий угол (λ°тек) отклонения вектора тяги относительно оси (OYδ); минимальный угол отклонения вектора тяги (λ°min) относительно оси (OYδ), равный разности значений половины телесного угла запаса управления вектором тяги (η°/2) и угла отклонения (δ°) конструктивной оси вала двигателя (OYδ) от продольной плоскости симметрии вертолета (OY1) (λ°min=((η°/2)-δ°));
- максимальный угол отклонения вектора тяги (λ°max) относительно оси (OYδ), равный сумме значений половины телесного угла запаса управления вектором тяги (η°/2) и угла отклонения (δ°) конструктивной оси вала двигателя (OYδ) от продольной плоскости симметрии вертолета (OY1) (λ°max=((η°/2)+δ°));
- угол крена ВППл корабля (γ°ВППл);
- прогнозируемое приращение угла крена ВППл корабля (Δγ°ВППл);
- угловая скорость качания ВППл корабля (ωхк)
С учетом принятых обозначений, на фигуре 14 графически представлен процесс посадки вертолета на ВППл корабля, когда вертолет движется по линии образующей конуса посадки (участок №2) с вертикальной скоростью снижения вертолета (Vy), углом отклонения (δ°>0) конструктивной оси вала двигателя от продольной плоскости симметрии вертолета (OY1) и положительным смещение центра масс (ΔZ>0). ВППл корабля имеет начальный положительный угол крена (γ°ВППл>0) и начальную положительную угловую скоростью качания ВППл корабля (ωхк>0).
По параметрам протокола обмена (ПО 12), в блоке траекторного вычислителя (ТВ) 39 интегрируется система дифференциальных уравнений динамики совместного движения вертолета и ВППл корабля и прогнозируется, начиная от момента контакта колеса стойки шасси с ВППл корабля, динамический процесс посадки вертолета на ВППл корабля с одновременным анализом пространственного и углового положения вертолета.
Решением системы дифференциальных уравнений прогнозируется увеличение угла крена ВППл корабля и одновременное увеличение сжатия упругих элементов стойки шасси (фигура 13) до значения величины сравнения равной нулю (ΔSпред=0) и одновременно с этим возникает и увеличивается возмущающая (по часовой стрелки) сила реакции действующая на вертолет от сжатия упругих элементов стойки шасси при контакте колеса стойки шасси (на фигуре 14 точка «К») с ВППл корабля (R) и момент от силы реакции (Mr) (далее по тексту - возмущающая сила реакции (R) и момент от силы реакции (Mr)), следовательно, увеличивается текущий угол крена вертолета. Для парирования увеличивающего угла крена вертолета от действия возмущающей силы реакции (R) и момента от силы реакции (Mr) в блоке траекторного вычислителя (ТВ) 39 моделируется увеличение текущего угла отклонения вектора тяги (λ°тек) до величины предельного значения (против часовой стрелки) минимального угла отклонения вектора тяги (λ°min<((η°/2)-δ°)) относительно оси (OYδ) (λ°тек=λ°min). Как следствие, увеличивается суммарное действие на вертолет боковой составляющей силы тяги несущего винта (Tz) и момента от боковой составляющей силы тяги несущего винта (Mтz) (против часовой стрелки в плоскости листа), но оно (на первых шагах интегрирования) не может преодолеть инерционное движение вертолета от действия возмущающей силы реакции (R) и момента от силы реакции (Mr). Прогнозируемое угловое положение вертолета продолжает опасно увеличиваться. Нагрузка на стойку шасси, которая вызвала возмущающую силу реакции (R) и момент от силы реакции (Mr), постепенно снижается и в блоке траекторного вычислителя (ТВ) 39, прогнозируется нагрузка на противоположную стойку шасси. Моделируемое увеличение текущего угла отклонения вектора тяги вертолета достигает величины предельного значения (λ°min=(η°/2)-δ°), и стойка шасси, вызвавшая возмущающую силу реакции (R) и момент от силы реакции (Mr), уже не касается ВППл корабля, но нагружается противоположная стойка шасси (на фигуре 14 точка «К2»). Боковая составляющая силы тяги несущего винта (Tz) и момент от боковой составляющей силы тяги несущего винта (Mтz), действуя одновременно с возмущающей силой реакции при сжатии упругого элемента от контакта колеса противоположной стойкой шасси с ВППл корабля (R2) и момент от силы реакции (Мr2), не могут остановить прогнозируемое инерционное пространственное и угловое движение вертолета, которое стремится к опасному угловому значению. В реальных условиях полета вертолета это соответствовало бы посадке на ВППл корабля, имеющей угол крена равный сумме угла крена ВППл корабля (γ°ВППл) и угла прогнозируемого приращения крена ВППл корабля (Δγ°ВППл), что недопустимо по безопасности полета - ((γ°ВППл)+(Δγ°ВППл)), поэтому для вертолета с данной особенностью положительного отклонения конструктивной оси вала двигателя (δ°>0) (по часовой стрелки в плоскости листа) от продольной плоскости симметрии вертолета (OY1) во временном цикле интегрирования системы дифференциальных уравнений, при данных начальных условиях протокола обмена (ПО 12), прогнозируется аварийная посадка. Для условия безопасной посадки вертолета на ВППл корабля, с выхода блока траекторного вычислителя (ТВ) 39 по протоколу обмена (ПО 14) (Kmv), в блок системы автоматического управления полетом (САУП) 10 передается числовое значение прогнозируемого коэффициента масштаба скорости полета ЛА равное единице «1.2» (Кmv=1.2), где значение заданной скорости полета вертолета (Vзад) корректируется на величину прогнозируемого значения коэффициента масштаба скорости полета ЛА (Кmv) (Vзад=Vзад*(Кmv≈1.2)). С выхода блока системы автоматического управления полетом САУП 10 в блок командно-пилотажного индикатора (КПИ) 9 на вход блока вычисления коэффициента скорости полета вертолета (mV) 19, передается увеличенный параметр заданной скорости полета вертолета (Vзад=Vзад*(Кmv=1.2)) и на индикационном поле (3) экрана (1) масштаб индекса «Лидер» (4) увеличится. Летчик, видит на индикационном поле (3) экрана (1) прогнозируемое увеличение масштаба индекса «Лидер» (4) и, в данный момент времени реального условия полета вертолета к ВППл корабля, уменьшает скорость снижения вертолета (Vy).
В блоке траекторного вычислителя (ТВ) 39 интегрируется система дифференциальных уравнений математической модели динамики совместного движения вертолета и ВППл корабля и моделируется прогнозируемое решение системы дифференциальных уравнений по постоянно поступающим новым данным текущих параметров пространственного положения ВППл корабля и текущих динамических параметров вертолета для безопасной посадки. Вертолет движется по образующей конуса посадки с новым значением параметра вертикальной скорости снижения (Vy), а в блоке траекторного вычислителя (ТВ) 39 интегрируется система дифференциальных уравнений с новыми начальными значениями угол крена ВППл корабля (γ°ВППл) и новыми начальными значениями угловую скоростью качания ВППл корабля (ωхк).
Безопасным (фигуре 15) вариантом посадки для летчика, зависшего над ВППл корабля выбран динамический параметр вертолета с меньшей вертикальной скоростью снижения (Vy), углом отклонения (δ°>0) конструктивной оси вала двигателя от продольной плоскости симметрии вертолета (OY1), положительным смещение центра масс (ΔZ>0), начальным положительным углом крена ВППл корабля (γ°ВППл>0) и начальной отрицательной угловой скоростью качания ВППл корабля (ωхк<0). Для данного варианта посадки прогнозируемая возмущающая сила реакции (R) и момент от силы реакции (Mr) стремятся поднять центр масс вертолета над ВППл корабля и увеличить угол крена вертолета (по часовой стрелки в плоскости листа), а отрицательная угловая скорость качания ВППл корабля стремится уменьшить текущий угол ВППл корабля. Для парирования увеличивающего угла крена вертолета от действия возмущающей силы реакции (R) и момента от силы реакции (Mr) в блоке траекторного вычислителя (ТВ) 39 моделируется увеличение текущего угла отклонения вектора тяги вертолета (λ°тек) относительно оси (OYδ) до значения минимального угла отклонения вектора тяги (λ°mах<((η°/2)-δ°)) относительно оси (OYδ). Как следствие, увеличивается боковая составляющей силы тяги несущего винта (Tz) и момент от боковой составляющей силы тяги несущего винта (Mтz) (против часовой стрелки в плоскости листа), что приводит к уменьшению угла крена вертолета. В блоке траекторного вычислителя (ТВ) 39 анализируется пространственное и угловое положение вертолета от одновременного действия на вертолет возмущающей силы реакции (R), момента от силы реакции (Mr), боковой составляющей силы тяги несущего винта (Tz), момента от боковой составляющей силы тяги несущего винта (Mтz) и уменьшение текущего угла крена ВППл корабля. Прогнозируемое увеличение текущего угла отклонения вектора тяги (λ°тек) относительно оси (OYδ) достаточно, для того, чтобы суммарным воздействием увеличивающейся боковой составляющей силы тяги несущего винта (Tz) и момента от боковой составляющей силы тяги несущего винта (Mтz), при одновременно уменьшающемся и стремящимся к горизонтальному углу ВППл корабля, преодолеть увеличение инерциального пространственного и углового положения вертолета. Прогнозируемое решение системы дифференциальных уравнений динамики посадки вертолета гарантирует летчику, при данной вертикальной скорости снижения вертолета (Vy) и при одновременном уменьшении угла ВППл корабля, обеспечение безопасной посадки вертолета на ВППл корабля. При этом условии с выхода блока траекторного вычислителя (ТВ) 39 по протоколу обмена (ПО 14) (Kmv), в блок системы автоматического управления полетом (САУП) 10 передается числовое значение прогнозируемого коэффициента масштаба скорости полета ЛА равное единице «1.0» (Кmv=1.0). где значение заданной скорости полета вертолета (Vзад) корректируется на величину прогнозируемого значения коэффициента масштаба скорости полета ЛА (Кmv) (Vзад=Vзад*(Кmv≈1.0)). С выхода блока системы автоматического управления полетом САУП 10 в блок командно-пилотажного индикатора (КПИ) 9 на вход блока вычисления коэффициента скорости полета вертолета (mV) 19, передается неизмененный параметр заданной скорости полета вертолета (Vзад=Vзад*(Кmv=1.0)) и на индикационном поле (3) экрана (1) масштаб индекса «Лидер» (4) тоже не изменяется. Летчик, наблюдая на индикационном поле (3) экрана (1) не измененный масштаб индекса «Лидер» (4), уверенно садится из точки «Окп» на ВППл корабля.
На фигуре (16) рассматривается вариант прогнозируемого решения системы дифференциальных уравнений для вертикальной скорости снижения вертолета (Vу), угла отклонения (δ°>0) конструктивной оси вала двигателя от продольной плоскости симметрии вертолета (OY1) и положительного смещения центра масс (ΔZ>0), начальный отрицательный угол крена ВППл корабля (γ°ВППл<0) и начальную положительную угловую скорость качания ВППл корабля (ωхк>0). Прогнозируемый контакт колеса стойки шасси с ВППл корабля (точка «К») на данной скорости снижения (Vy) показывает, что возмущающая сила реакции от сжатия упругих элементов стойки шасси (R) стремится поднять центр масс вертолета над ВППл корабля, а момент от силы реакции (Mr) стремится увеличить угловое положение вертолета (против часовой стрелки в плоскости листа), но положительная угловая скорость качания ВППл корабля стремится уменьшить текущий угол ВППл корабля. По полученным входным данным протокола обмена (ПО 12), в блоке траекторного вычислителя (ТВ) 39 моделируется увеличение текущего угла отклонения вектора тяги вертолета (λ°тек) относительно оси (OYδ) до значения максимального угла отклонения вектора тяги (λ°max<(η°/2)+δ°)) относительно оси (OYδ). Как следствие, увеличивается боковая составляющей силы тяги несущего винта (Tz) и момент от боковой составляющей силы тяги несущего винта (Mтz) (по часовой стрелки в плоскости листа), что приводит к уменьшению угла крена вертолета. В блоке траекторного вычислителя (ТВ) 39 анализируется пространственное и угловое положение вертолета от одновременного действия на вертолет возмущающей силы реакции (R), момента от силы реакции (Mr), боковой составляющей силы тяги несущего винта (Tz), момента от боковой составляющей силы тяги несущего винта (Mтz) и уменьшение текущего угла ВППл корабля (γ°ВППл). Прогнозируемое увеличение текущего угла отклонения вектора тяги (λ°тек) относительно оси (OYδ) до значения максимального угла отклонения вектора тяги (λ°max=(η°/2)+δ°) достаточно, для того, чтобы суммарным действием увеличивающейся боковой составляющей силы тяги несущего винта (Tz) и момента от боковой составляющей силы тяги несущего винта (Mтz), при одновременно уменьшающемся и стремящемуся к горизонтальному углу ВППл корабля, преодолеть увеличение инерциального пространственного и углового положения вертолета. При этом условии, в блоке траекторного вычислителя (ТВ) 39 прогнозируется безопасная посадка вертолета на ВППл корабля, поэтому с выхода блока траекторного вычислителя (ТВ) 39 по протоколу обмена (ПО 14) (Kmv), в блок системы автоматического управления полетом (САУП) 10 передается числовое значение прогнозируемого коэффициента масштаба скорости полета ЛА равное единице «1.0» (Кmv=1.0), где значение заданной скорости полета вертолета (Vзад) корректируется на величину прогнозируемого значения коэффициента масштаба скорости полета ЛА (Кmv) (Vзад=Vзад*(Кmv≈1.0)). С выхода блока системы автоматического управления полетом САУП 10 в блок командно-пилотажного индикатора (КПИ) 9 на вход блока вычисления коэффициента скорости полета вертолета (mV) 19, передается неизмененный параметр заданной скорости полета вертолета (Vзад=Vзад*(Кmv=1.0)) и на индикационном поле (3) экрана (1) масштаб индекса «Лидер» (4) тоже не изменяется. Летчик, видит на индикационном поле (3) экрана (1) не измененный масштаб индекса «Лидер» (4) и, управляя процессом посадки вертолета, уверенно садится по траектории образующей конуса посадки, на ВППл корабля.
На фигуре (17) графически представлен прогнозируемый процесс посадки вертолета на ВППл корабля. Анализируется вариант прогнозируемого решения системы дифференциальных уравнений динамики посадки вертолета, с вертикальной скорости снижения вертолета (Vy), углом отклонения (δ°>0) конструктивной оси вала двигателя от продольной плоскости симметрии вертолета (OY1) и положительным смещением центра масс (ΔZ>0), с начальным отрицательным углом крена ВППл корабля (γ°ВППл<0) и начальной отрицательной угловой скоростью качания ВППл корабля (ωхк<0), стремящейся увеличить угол крена ВППл корабля (γ°ВППл). Анализ прогнозируемого пространственного и углового положения вертолета в бортовом вычислителе конуса посадки начинается с момента контакта колеса стойки шасси с ВППл корабля (точка «К»). При начальном отрицательном угле крена ВППл корабля (γ°ВППл<0) и начальной отрицательной угловой скорости качания ВППл корабля (ωхк<0) прогнозируется увеличение угла крена ВППл корабля, увеличение силы сжатия упругих элементов стойки шасси (фигура 13) до предельного значения (ΔSпред=0) и одновременного увеличения возмущающей (против часовой стрелки) силы реакции (R) и момент от силы реакции (Mr) (на фигуре 17 позиции (R) и (Mr) в точке (К) не показаны, но их позиции совпадают с позицией на фигуре 16). Как следствие, текущий угол крена вертолета начинает увеличиваться. Для парирования увеличивающего угла крена вертолета моделируется увеличение текущего угла отклонения вектора тяги (λ°тек), это увеличивает суммарное действие на вертолет боковой составляющей силы тяги несущего винта (Tz) и момента от боковой составляющей силы тяги несущего винта (Mтz) (по часовой стрелки в плоскости листа), но оно в первый период интегрирования системы дифференциальных уравнений не может преодолеть инерционное движение вертолета и поэтому численно меньше, чем было суммарное действие возмущающей силы реакции (R) и момента от силы реакции (Mr). Прогнозируется, что в это время возмущающая сила реакции (R) и момент от силы реакции (Mr), максимально увеличивают угловое положение вертолета. Угловое положение вертолета продолжает опасно увеличиваться из-за свойства инерционно-массовых характеристик, хотя нагрузка на стойку шасси (точка «К»), вызвавшая возмущающую силу реакции (R) и момент от силы реакции (Mr), постепенно снижается. Прогнозируемое увеличение текущего угла отклонения вектора тяги вертолета не достигло предельного максимального значения (λ°max=(η°/2)+δ°), но по прогнозу стойка шасси, вызвавшая возмущающую силу реакции (R) и момент от силы реакции (Mr), уже не касается ВППл корабля, а нагружается противоположная стойка шасси (точка «К2»). Угловое положение вертолета по углу крена увеличивается на величину (Δγ°ВППл>0). В блоке траекторного вычислителя (ТВ) 39 увеличивается значение текущего угла отклонения вектора тяги относительно оси (OYδ) (λ°тек) до значения максимального угла отклонения вектора тяги относительно оси (OYδ) (λ°max=((η°/2)+δ°)). Боковая составляющая силы тяги несущего винта (Tz) и момент от боковой составляющей силы тяги несущего винта (Mтz), действуя одновременно с возмущающей силой реакции при сжатии упругого элемента от контакта колеса противоположной стойкой шасси с ВППл корабля (R2) и момент от силы реакции (Мr2) (точка «К2»), преодолевают прогнозируемое (против часовой стрелки в плоскости листа) инерционное пространственное и угловое движение вертолета. Но во временном цикле интегрирования системы дифференциальных уравнений, при увеличивающемся угле ВППл корабля, прогнозируется, что в блоке вычисления прогнозируемых сил и моментов, действующих на центр масс вертолета при сжатии упругих элементов стоек шасси (ПСМ) 30, не будет разрушений стоик шасси. В блоке траекторного вычислителя (ТВ) 39 при этом условии прогнозируется безопасная посадка вертолета на ВППл корабля. С выхода блока траекторного вычислителя (ТВ) 39 по протоколу обмена (ПО 14) (Kmv), в блок системы автоматического управления полетом (САУП) 10 передается числовое значение прогнозируемого коэффициента масштаба скорости полета ЛА равное единице «1.0» (Кmv=1.0). где значение заданной скорости полета вертолета (Vзад) корректируется на величину прогнозируемого значения коэффициента масштаба скорости полета ЛА (Кmv) (Vзад=Vзад*(Кmv≈1.0)). С выхода блока системы автоматического управления полетом САУП 10 в блок командно-пилотажного индикатора (КПИ) 9 на вход блока вычисления коэффициента скорости полета вертолета (mV) 19, передается неизмененный параметр заданной скорости полета вертолета (Vзад=Vзад*(Кmv=1.0)) и на индикационном поле (3) экрана (1) масштаб индекса «Лидер» (4) тоже не изменяется. Летчик видит на индикационном поле (3) экрана (1) не измененный масштаб индекса «Лидер» (4) и, управляя процессом посадки вертолета, уверенно садится по траектории образующей конуса посадки на ВППл корабля.
На фигурах (18-19) представлено прогнозируемое решение полной системы дифференциальных уравнений совместного пространственного движения вертолета при посадке на ВППл корабля и пространственного движения ВППл корабля. Физические свойств упругих элементов стоек шасси вертолета принимались различными для передних стоек и задних стоек.
На графике фигуры (18) представлено прогнозируемое решении системы дифференциальных уравнений от момента зависания над ВППл корабля в точке (Окп) - вершине конуса посадки и посадки на ВППл корабля. Вертолет завис в точке (Окп) То=0 секунд. Посадка вертолета на ВППл корабля от То=38 секунды до Тк=44 секунды. На графике видно, что посадка на ВППл корабля с отрицательным углом крена увеличивает нагрузку на правую переднюю и правую заднюю стойки шасси по сравнению с нагрузкой на левую переднюю и левую заднюю стойки от 250 кг до 500 кг.
На графике фигуры (19) представлено прогнозируемое решении системы дифференциальных уравнений от момента зависания над ВППл корабля в точке (Окп) - вершине конуса посадки, посадки на ВППл корабля и нахождения на ВППл корабля после посадки. Вертолет завис в точке (Окп) То=0 секунд. Посадка вертолета на ВППл корабля от То=38 секунды до Тк=44 секунды. Нахождение вертолета на ВППл корабля после посадки от То=44 секунды до Тк=200 секунды. На графике видно, что нагрузки на стойки шасси амортизируют вес вертолета при качании ВППл корабля в диапазоне ± 35 кг. Фаза нагрузок на левые стойки шасси противоположна фазе нагрузок на правые стойки шасси вертолета при качании ВППл корабля. Решение системы дифференциальных уравнений на графике фигуры (19) соответствует безопасной посадки вертолета, так как прогнозируемое пространственно-угловое положение вертолета при посадке на ВППл корабля не превосходит эмпирических параметров пространственно-углового положения, при которых обеспечиваются условия безопасной посадки вертолета на ВППл корабля.
Использовались рисунки из книги АС Браверман и др.
«Балансировка одновинтового вертолета», стр. 98, 105. 106.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| Командно-пилотажный индикатор вертолета | 2021 |
|
RU2778955C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2020 |
|
RU2778716C2 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2013 |
|
RU2539708C1 |
| Светотехническое оборудование взлетно-посадочной площадки корабля | 2019 |
|
RU2739849C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| Система посадки летательного аппарата на корабль с применением цифровых технологий | 2020 |
|
RU2734173C1 |
| СПОСОБ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ О ВЕРТИКАЛЬНОМ ПЕРЕМЕЩЕНИИ КОРАБЕЛЬНОЙ ВЗЛЕТНО-ПОСАДОЧНОЙ ПЛОЩАДКИ ПРИ ПОСАДКЕ ВЕРТОЛЕТА НА КОРАБЛЬ | 2012 |
|
RU2506654C2 |
| Система управления полётами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах | 2017 |
|
RU2667654C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
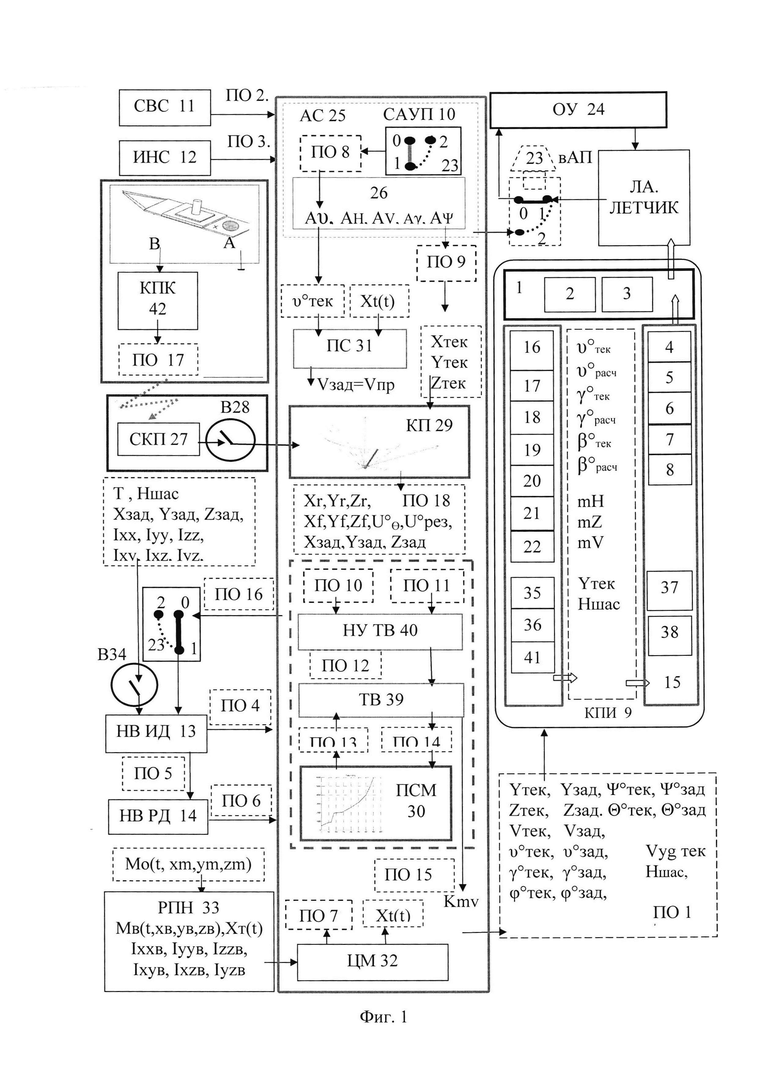
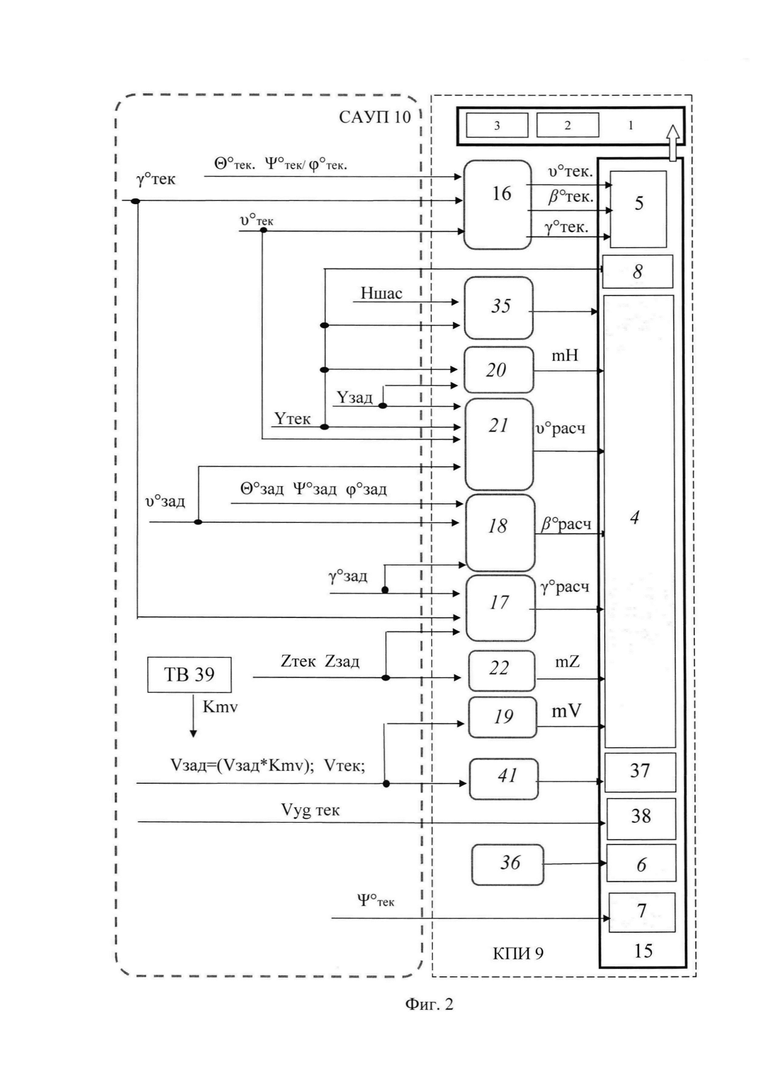
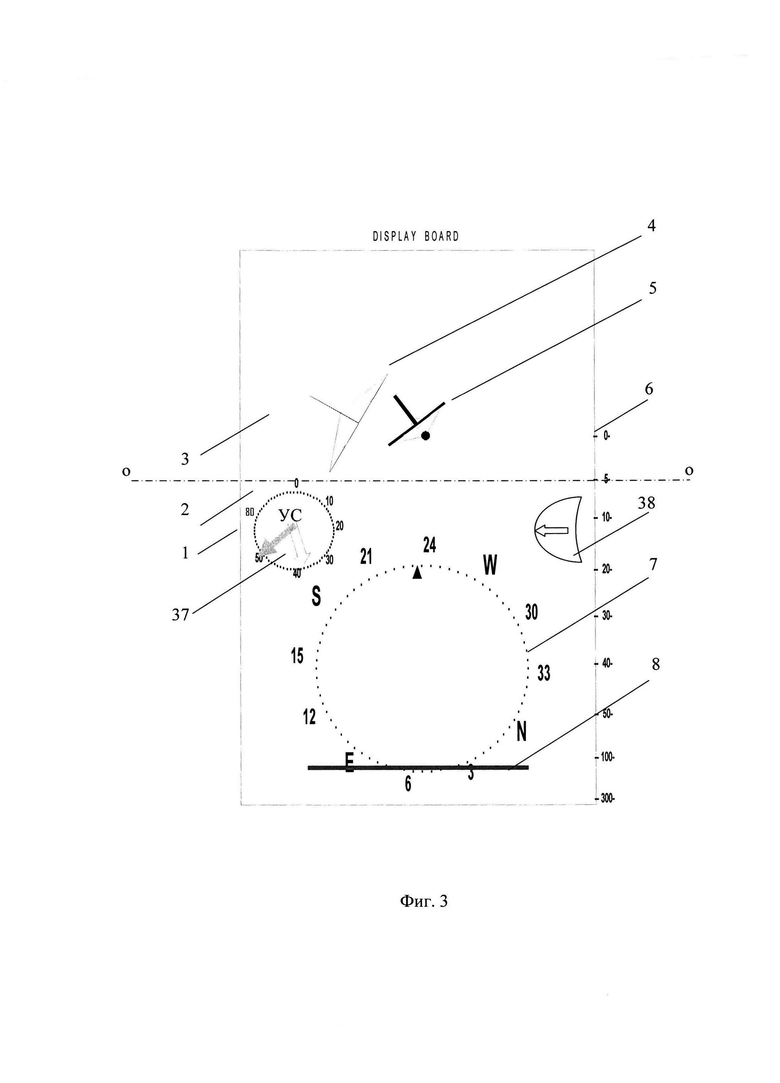
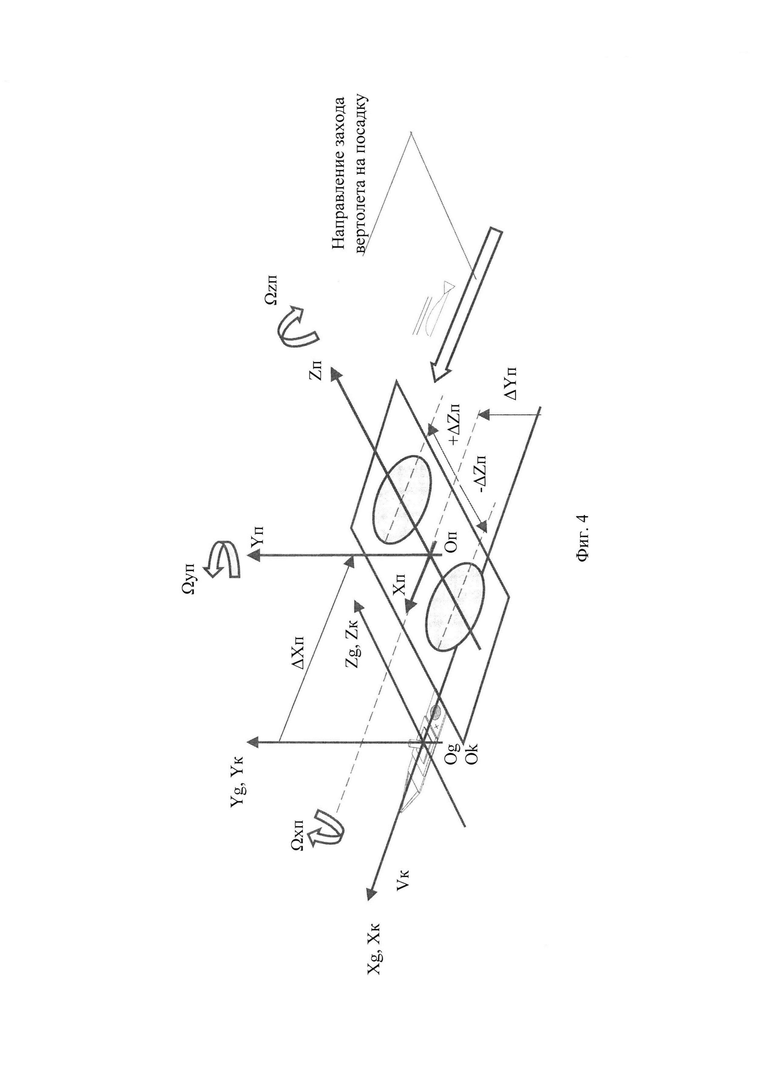

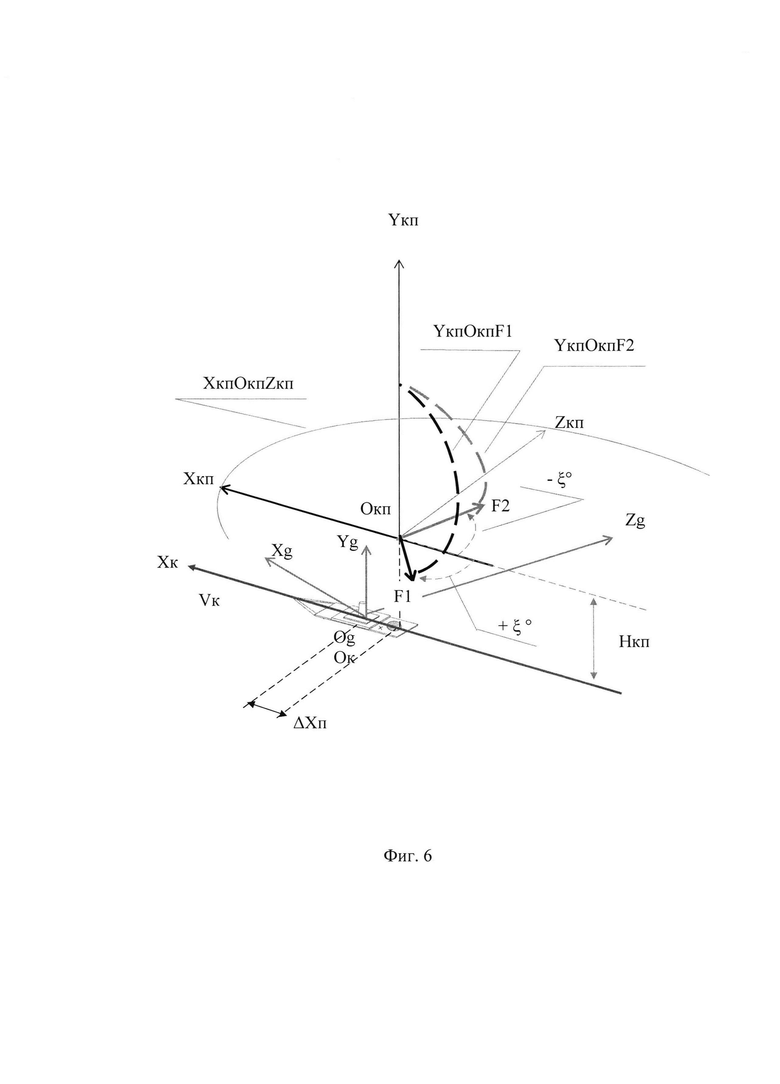
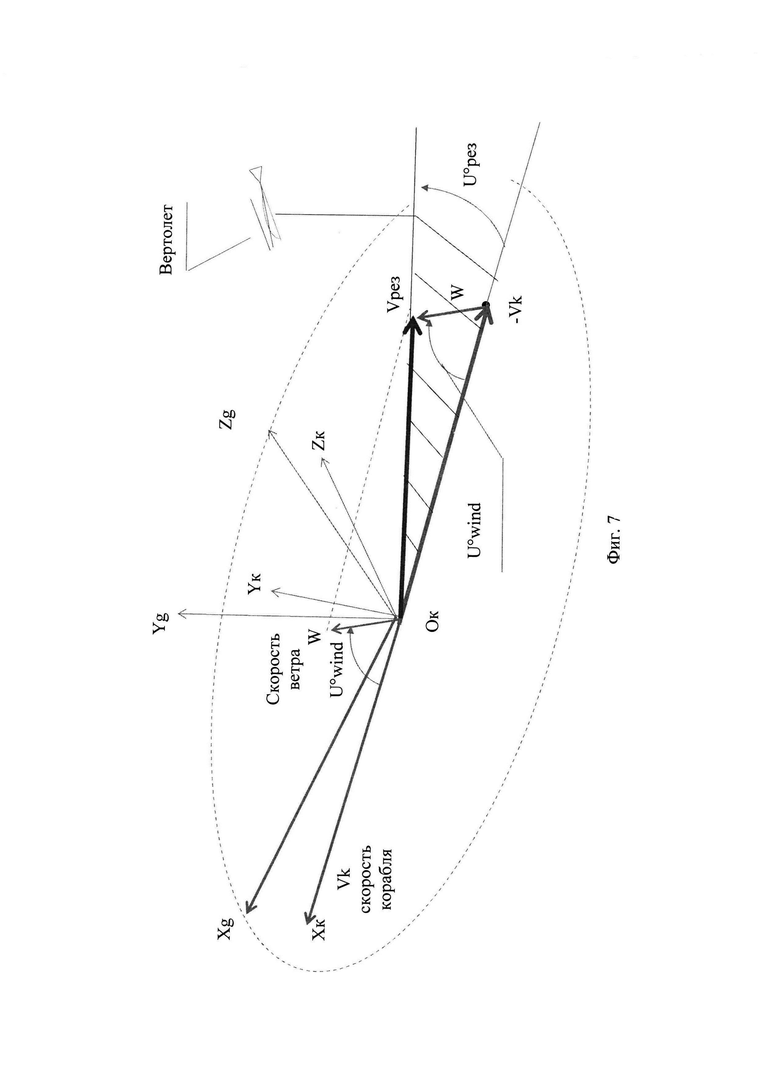
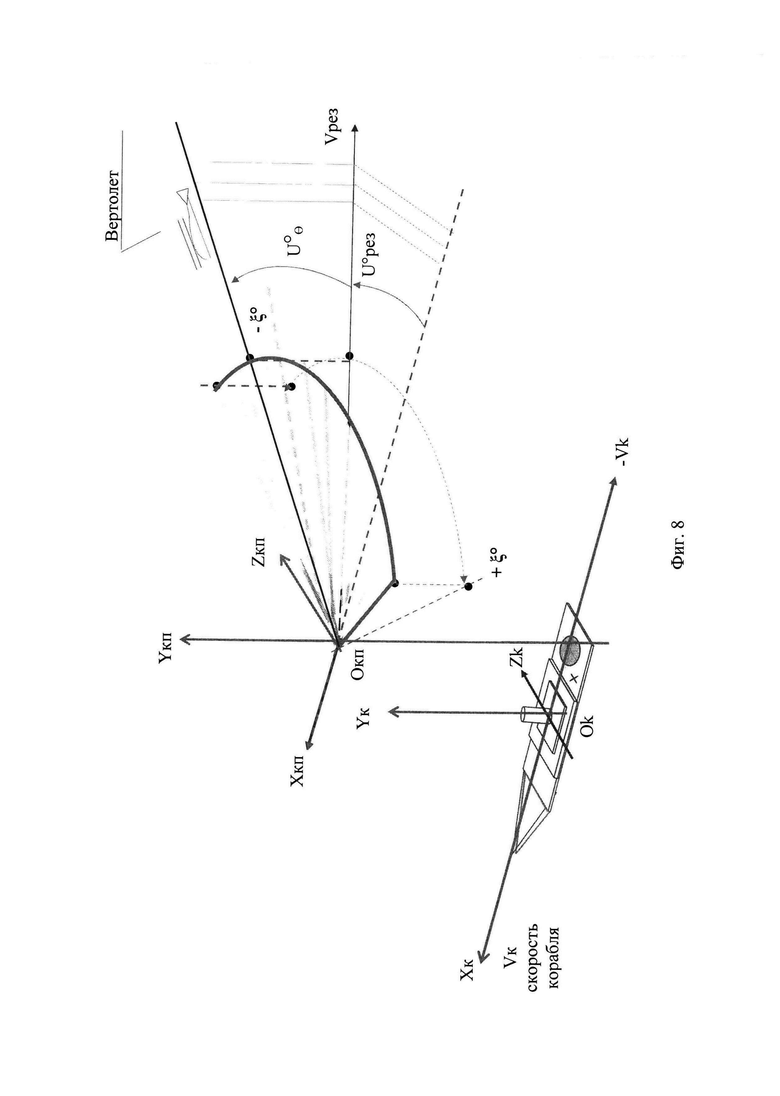
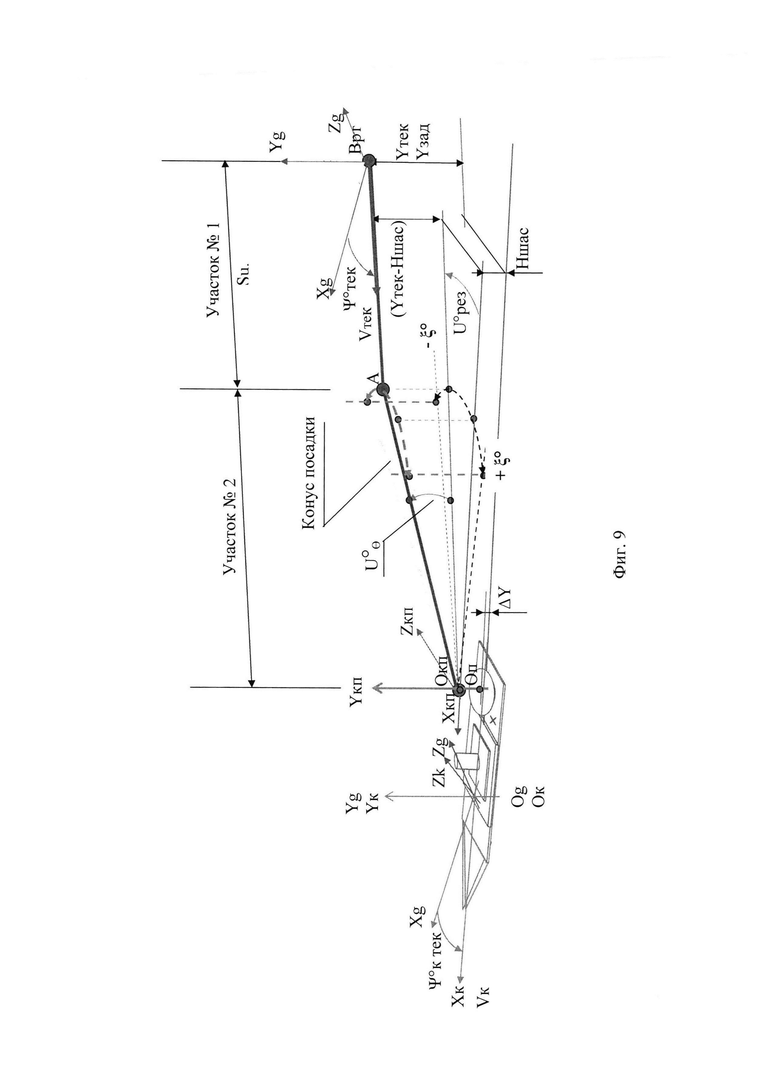
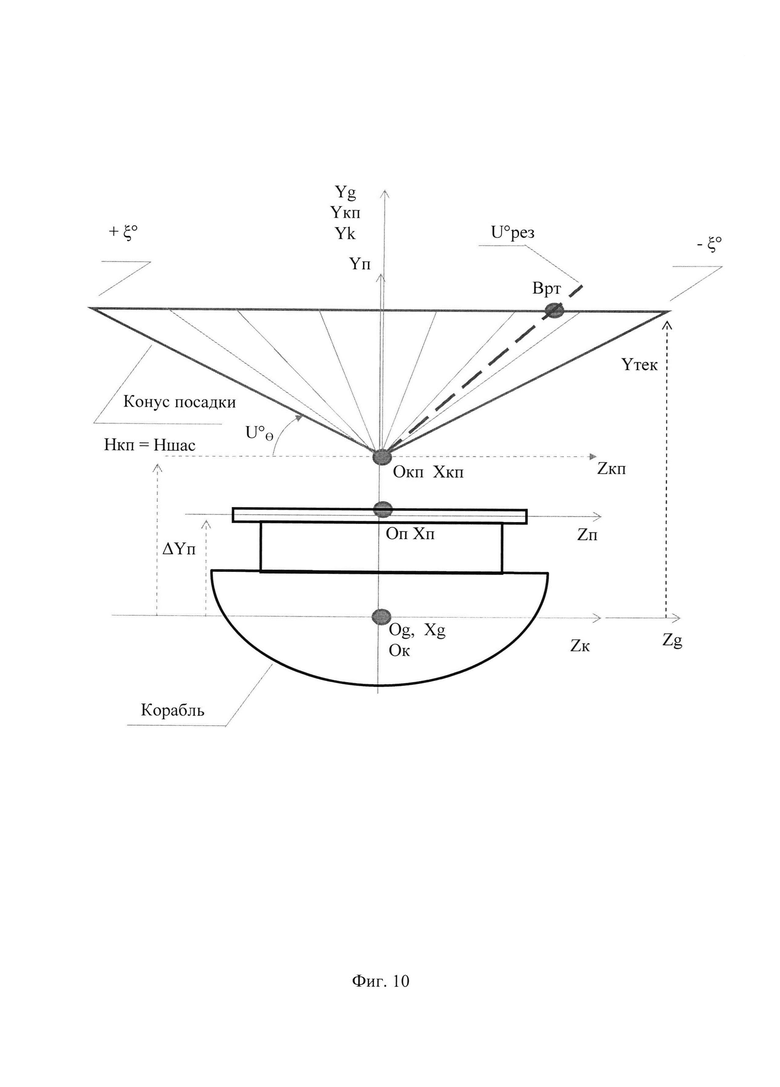
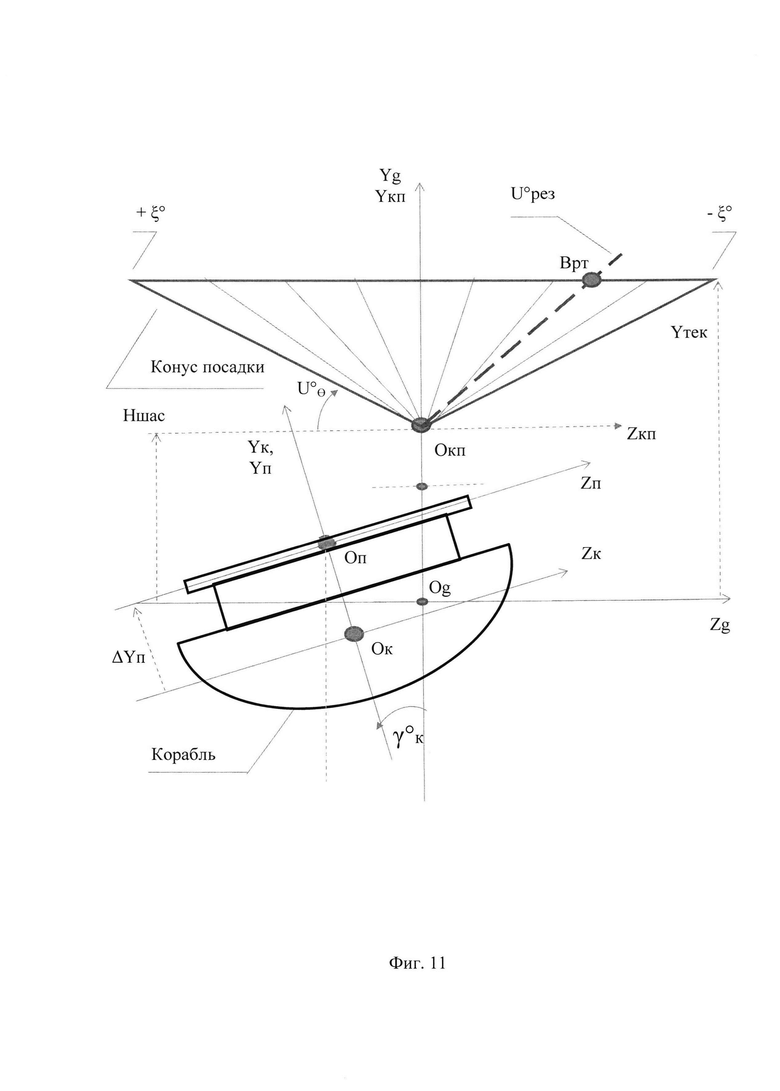
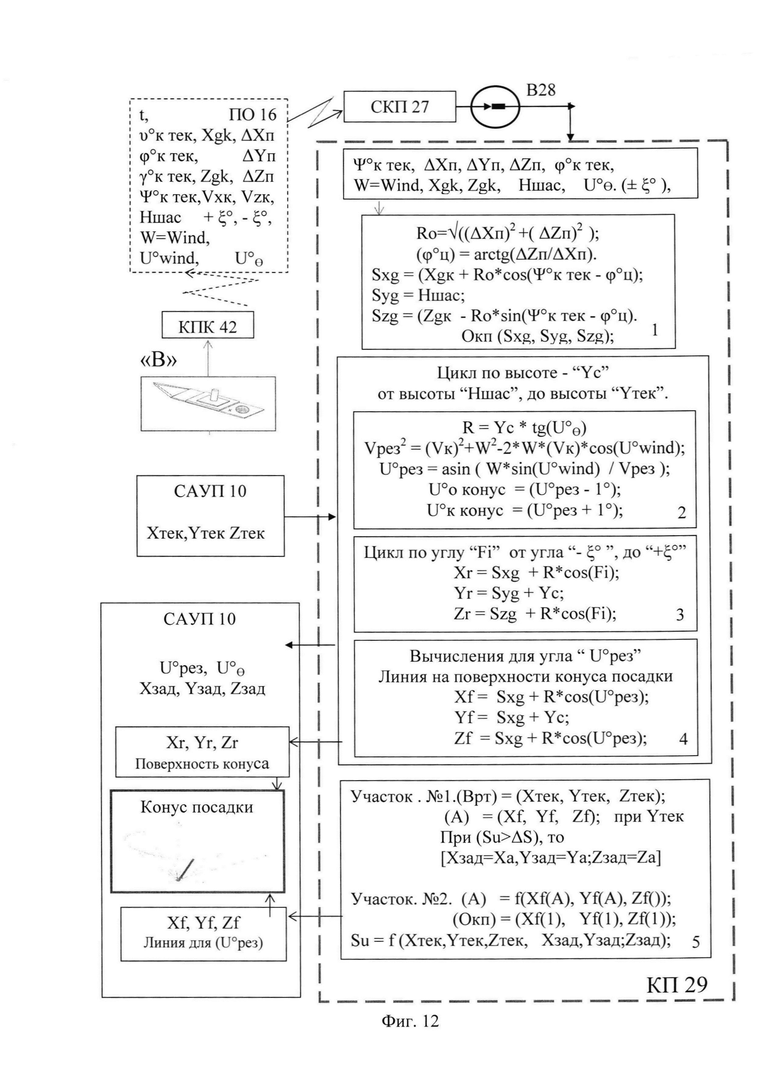
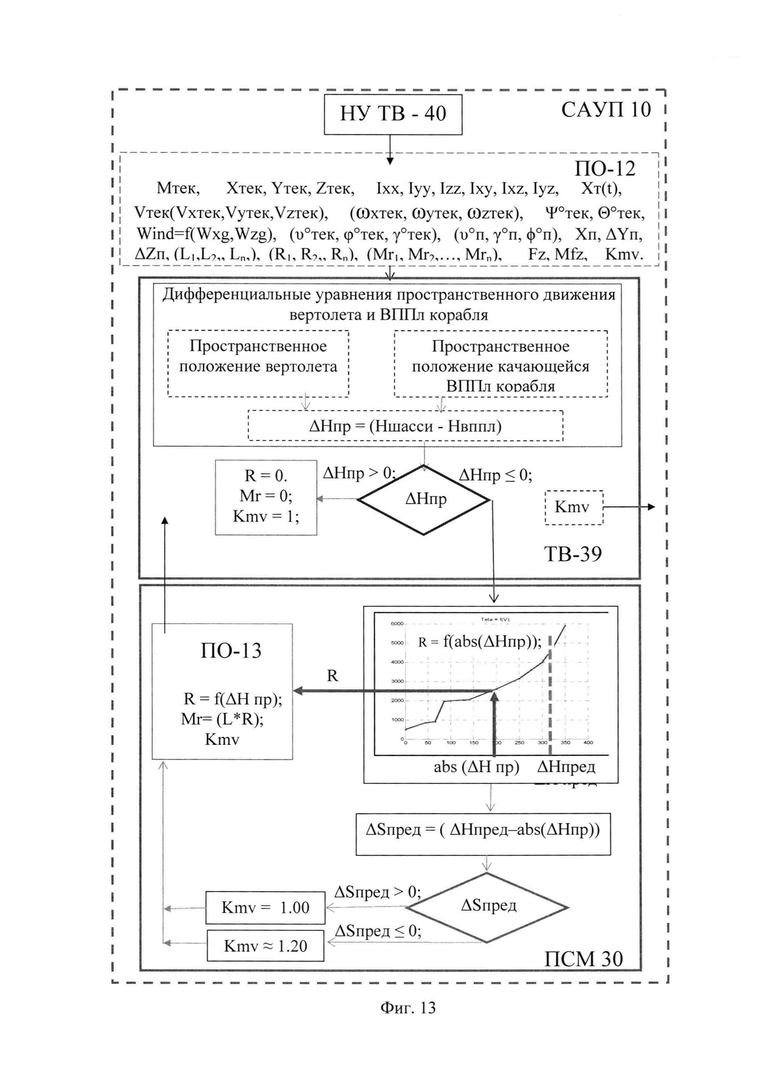

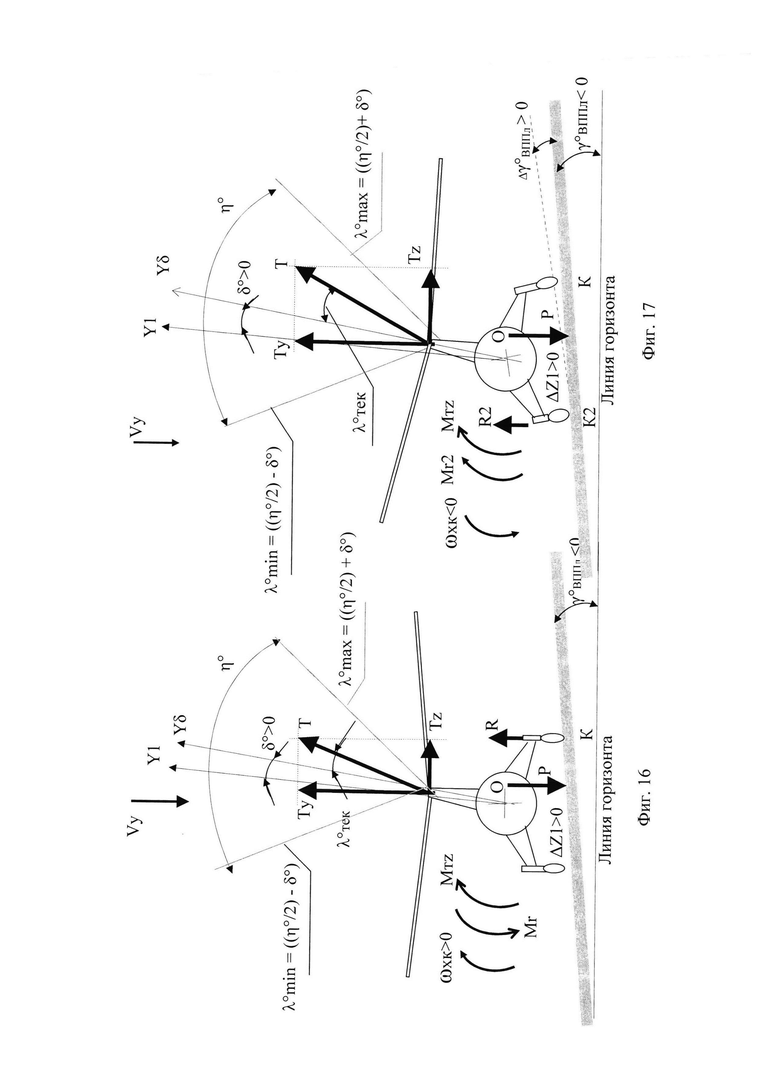
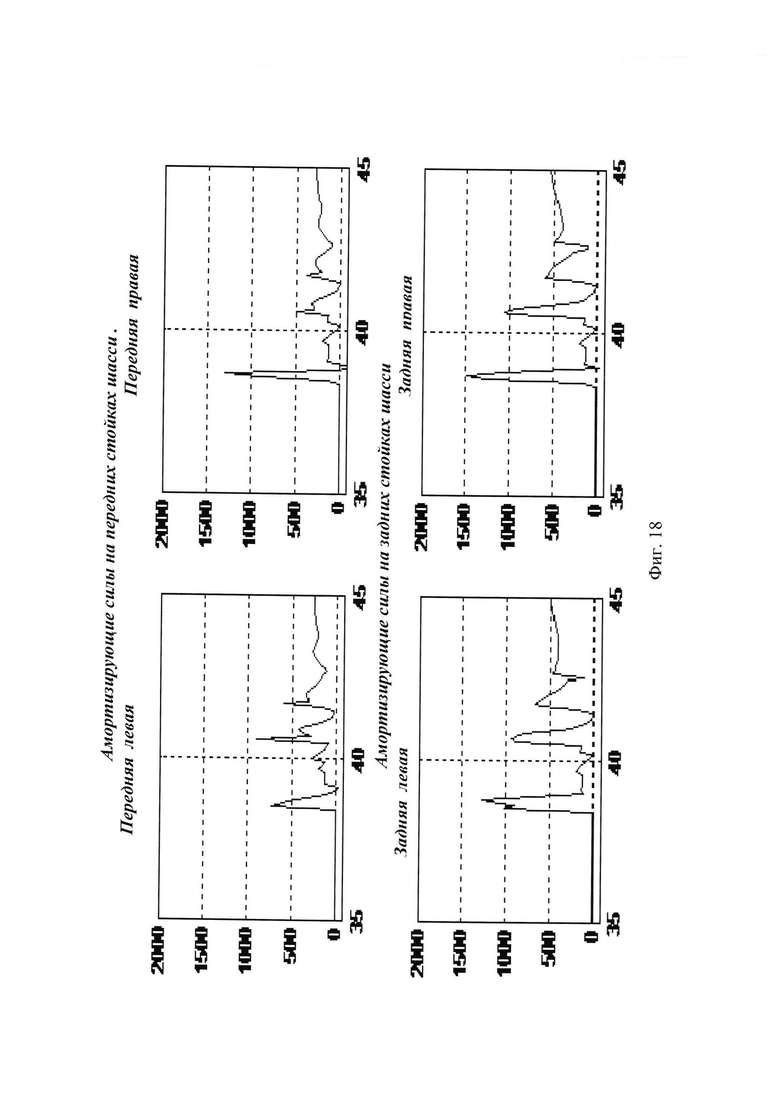
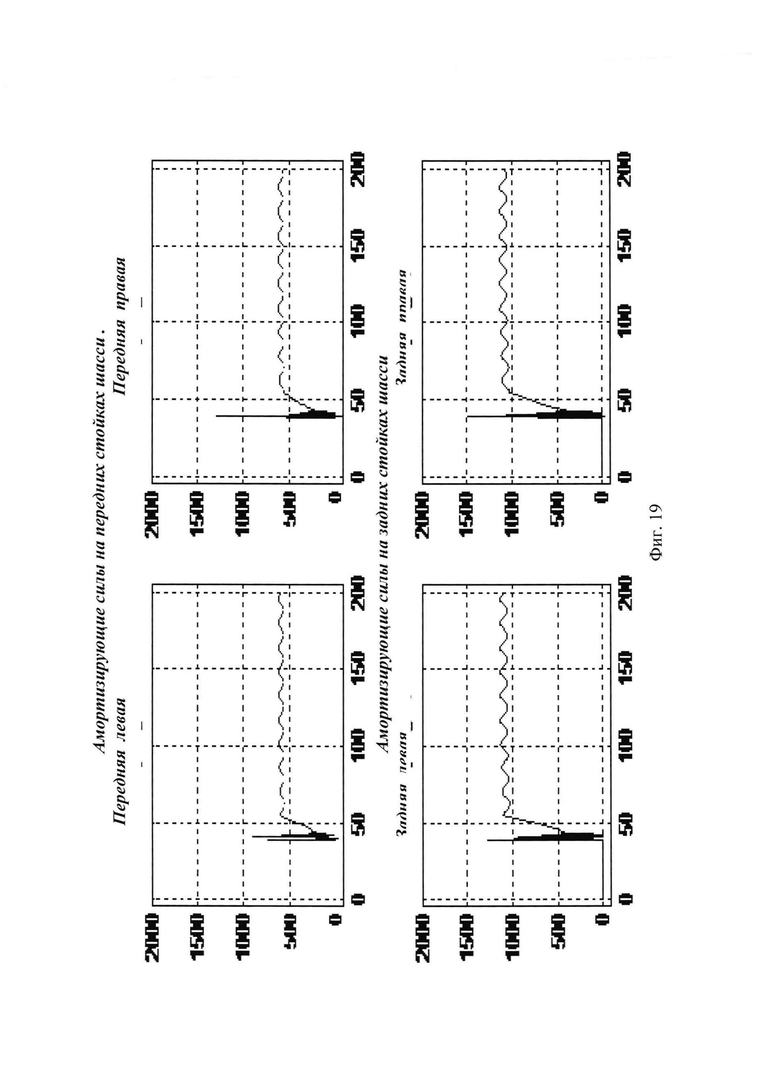
Изобретение относится к устройствам отображения информации, а именно к командно-пилотажным индикаторам (КПИ). Технической задачей заявляемого изобретения является повышение безопасности и упрощение контроля выполнения программных режимов полета; упрощение пилотирования вертолетом при полете в сложных метеоусловиях в точку; а также исключение аварийных случаев при посадке вертолета в сложных метеоусловиях на качающуюся взлетно-посадочную полосу корабля за счет повышения информационной наглядности представления на экране КПИ прогнозируемых параметров динамики движения вертолета. Предложенный командно-пилотажный индикатор вертолета содержит экран, блок, индицирующий на навигационном поле, блок командно-пилотажного индикатора, блок системы автоматического управления полетом, блок системы воздушных сигналов, блок генератора символов, блоки вычисления различных параметров полета, блок автопилота, указатели различных составляющих скоростей полета, блок траекторного вычислителя, а также ряд других блоков, необходимых для функционирования вертолета, соответствующим образом соединенных между собой. 19 ил. 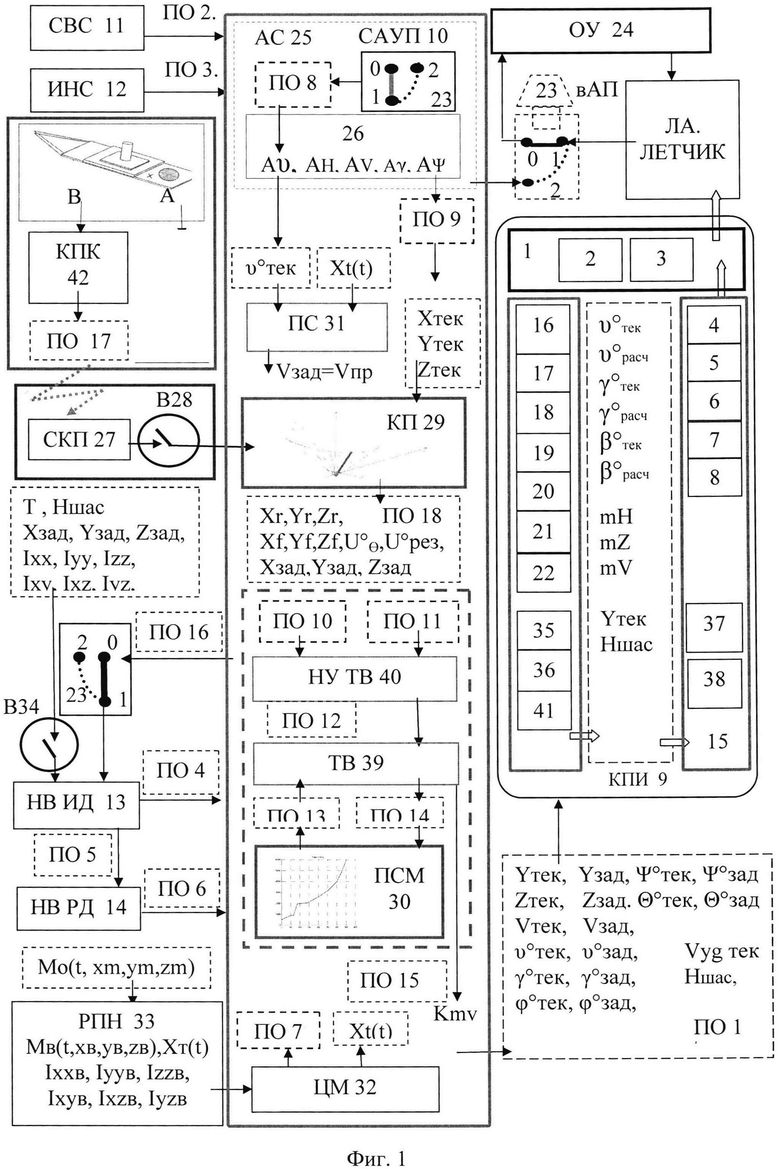
Командно-пилотажный индикатор вертолета, содержащий экран, на котором индицируются неподвижный относительно центра индикационного поля экрана отсчетный индекс "Самолет", выполненный в виде одной горизонтальной прямой, символизирующей крылья летательного аппарата (ЛА), и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии и обозначающий текущее положение вертолета в пространстве, индицируемый на экране подвижный индекс "Лидер", выполненный в виде одной горизонтальной прямой, символизирующей крылья ЛА, и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии, а также перемещения по вертикали и горизонтали относительно индекса "Самолет" и обозначающий требуемое положение в пространстве, генератор символов, соединенный с экраном, средства управления подвижным индексом "Лидер", выполненные в виде блоков вычисления характеристик "Лидера", а именно: - блока вычисления параметров текущего угла скольжения, - блока вычисления значения расчетного угла крена, - блока вычисления расчетного угла скольжения, - блока расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА, - блока вычисления значения расчетного угла тангажа, - блока расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА, на входы которых поступают сигналы из систем ЛА, а с выходов которых на генератор символов поступают сигналы в соответствии с величиной ошибки управления по высоте, обеспечивающие перемещение индекса "Лидер" по индикационному полю в вертикальном направлении, с возможностью индикации индекса "радиовысота" и неподвижной неравномерной шкалы значения высоты полета, индицируемой на вертикальной стороне границы индикационного поля экрана с нулевым значением высоты, расположенным на уровне горизонтальной линии, проходящей через центр индикационного поля экрана, при этом индекс "Самолет" и индекс "Лидер" выполнены с возможностью одновременного отображения угла скольжения и угла тангажа, путем индикации треугольника, основание которого равно длине горизонтальной прямой линии, символизирующей крылья ЛА, а положение вершины треугольника соответствует текущему значению угла тангажа и угла скольжения индексом "Самолет" и отклонению от заданного значения угла тангажа и угла скольжения индексом "Лидер" поворотом индекса "Лидер" вокруг центра симметрии в соответствии с величиной ошибки по углу крена, увеличением или уменьшением линейных размеров индекса «Лидер» при увеличении или уменьшении, соответственно, заданной скорости полета таким образом, что при нулевых значениях ошибок по всем контролируемым параметрам индекс "Лидер" совмещается с индексом "Самолет", средства управления командно-пилотажного индикатора дополнительно используют: - блок учета расхода в полете массы полезной нагрузки вертолета, - блок, индицирующий указатель скорости полета вертолета, указатель скорости полета вертолета с числовой шкалой, индексом указателя текущей скорости полета вертолета, индексом указателя заданной скорости полета вертолета, - блок вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значения параметра продольного расстояния от центра масс вертолета до оси несущего винта, - блок расчета прогнозируемой скорости полета вертолета и переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости, отличающийся тем, что дополнительно снабжен: - приемником параметров пространственного положения конуса посадки, - переключателем ввода данных параметров конуса посадки, - блоком вычисления аналитических параметров конуса посадки, - блоком вычисления прогнозируемых сил и моментов, действующих на центр масс вертолета при сжатии упругих элементов стоек шасси, - блоком траекторного вычислителя, - блоком начальных условий траекторного вычислителя, - блоком корабля, передающего параметры конуса посадки по каналу связи «корабль-вертолет», причем выход блока корабля, передающего параметры конуса посадки по каналу связи «корабль-вертолет», соединен с входом приемника параметров пространственного положения конуса посадки по каналу связи «корабль-вертолет» по параметрам конуса посадки: - текущего времени, - проекциям скорости корабля в земной системы координат, - текущему углу курса корабля, - модулю текущего вектора средней скорости ветра, - направлению ветра, - значениям углов, обеспечивающих безопасный подход к точке зависания над ВППл корабля, - значению угла глиссады, - расстоянию от центра масс корабля до центра плоскости ВППл корабля, - программно-задаваемой высоте полета вертолета на исполнение команды «убрать шасси»/«выпустить шасси», - текущему угловому положению корабля по углам дифферента, рыскания и крена, - координате центра масс корабля в земной системе координат, выход которого через переключатель ввода данных параметров конуса посадки по параметрам конуса посадки соединен с первым входом блока вычисления аналитических параметров конуса посадки, в котором второй вход по параметрам координат текущего положения центра масс вертолета в земной системе координат и выход по параметрам: - массива числовых значений поверхности конуса посадки, - массива числовых значений образующей конуса посадки, - вычисленного значения угла глиссады, - заданного направления вектора результирующего воздушного потока, - программно-задаваемым координатам конечной точки участка траектории полета соединены с блоком системы автоматического управления полетом, в котором выход по изменяющимся в полете параметрам: - текущей массы вертолета, - координатам текущего положения центра масс вертолета в земной системе координат, - инерционно-массовым характеристиками для связанных осей системы координат вертолета, - текущему значению продольного расстояния от оси несущего винта до центра масс вертолета, - текущему значению скорости полета вертолета, - текущим проекциям вектора угловой скорости, - текущему угловому положению вертолета (углу тангажа, углу рыскания, углу крена), - текущему угловому положению плоскости ВППл корабля (по углу дифферента, углу рыскания и углу крена), - текущему значению угла поворота траектории вертолета, - текущему значению угла наклона траектории вертолета, - модулю текущего вектора средней скорости ветра, - координатам точки траектории, к которой движется вертолет на программно-задаваемом маршруте при заходе на посадку на качающуюся плоскость ВППл корабля (программно-задаваемой дальности на маршруте, программно-задаваемой высоте полета вертолета на маршруте, программно-задаваемому боковому отклонению полета вертолета) соединен с первым входом, а выход по параметрам: - значений неизменяющихся величин пространственного положения стоек шасси в связанной с вертолетом системе координат, - расстояния от центра масс корабля до центра плоскости ВППл корабля соединен со вторым входом блока начальных условий траекторного вычислителя, выход которого соединен с первым входом в блок траекторного вычислителя по параметрам: - текущей массы вертолета, - текущих координат пространственного положения центра масс вертолета в земной системе координат, - вычисленных инерционно-массовых характеристик для связанных осей системы координат вертолета, - текущего значения продольного расстояния от оси несущего винта до центра масс вертолета, - проекций вектора текущей скорости полета вертолета, - текущих проекций вектора угловой скорости, - текущего углового положения вертолета (углу тангажа, углу рыскания, углу крена), - текущего значения угла поворота траектории вертолета, - текущего значения угла наклона траектории вертолета, - текущих горизонтальных проекций вектора средней скорости ветра в земной системе координат, - значений вычисленных векторов прогнозируемых сил в земной системе координат, - значений вычисленных векторов прогнозируемых моментов в связанной системе координат, - значений неизменяющихся величин пространственного положения стоек шасси в связанной с вертолетом системе координат, - текущего углового положения плоскости ВППл корабля (по углу дифферента, углу рыскания и углу крена), - прогнозируемого коэффициента масштаба скорости полета ЛА, - расстояния от центра масс корабля до центра плоскости ВППл корабля, первый выход из которого соединен для всех стоек шасси по параметру разности прогнозируемого пространственного положения колеса стойки шасси и координат проекции прогнозируемого пространственного положения колеса стойки шасси на ВППл корабля с входом в блок вычисления прогнозируемых сил и моментов, действующих на центр масс вертолета при сжатии упругих элементов стоек шасси, выход из которого соединен по параметрам: - значений вычисленных векторов прогнозируемых сил в земной системе координат, - значений вычисленных векторов прогнозируемых моментов в связанной системе координат и прогнозируемого значения коэффициента масштаба скорости полета ЛА со вторым входом в блок траекторного вычислителя, второй выход которого соединен по параметру прогнозируемого значения коэффициента масштаба скорости полета ЛА с входом в блок системы автоматического управления полетом, выход из которого по параметру величины заданной скорости полета вертолета, умноженной на прогнозируемое значение коэффициента масштаба скорости полета ЛА, соединен с входом в блок вычисления коэффициента скорости полета вертолета и входом в блок, индицирующий указатель скорости полета вертолета, указатель скорости полета вертолета с числовой шкалой, индексом указателя текущей скорости полета вертолета, индексом указателя заданной скорости полета вертолета, выходы которых соединены с генератором символов, который выполнен с возможностью индикации прибора указателя скорости полета вертолета с числовой шкалой, индексом указателя текущей скорости полета вертолета, индексом указателя заданной скорости полета вертолета.
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2013 |
|
RU2539708C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| Приспособление для сигнализации при обрыве нити | 1933 |
|
SU44842A1 |
| US 5915273 A1, 22.06.1999. | |||

