Группа изобретений относится к интегрированным комплексам бортового оборудования вертолета, в частности к системе визуализации полета (далее - СВП), а именно системам визуализации пилотажных параметров полета, системам инструментальной видимости окружающей среды закабинного пространства (организация отображения пространства неба, плоскости подстилающей поверхности и разделяющей их линии), системам отображения препятствий на подстилающей поверхности в реальном режиме времени в зонах взлета и посадки вертолета, системам отображения синтезированной видимости закабинного пространства подстилающей поверхности на этапах набора высоты, горизонтального полета, снижения, захода на посадку до высоты принятия решения, системе улучшенного отображения высотного профиля рельефа местности и предупреждения столкновения вертолета в управляемом полете с земной поверхностью и искусственными препятствиями на ней, а также к когнитивному пилотажному индикатору (далее - КПИ), предназначенному для отображения параметрической и сигнальной информации, характерной для полета одновинтового вертолета.
СВП и КПИ предназначены для безопасного пилотирования вертолета на всех этапах полета (запуск силовых установок и раскрутка трансмиссии, руление, висение, перемещение, взлет, горизонтальный полет, снижение, посадка) и режимах полета (выдерживание заданных скорости, курса, высоты, крена, тангажа, в том числе для выполнения любых режимов маневрирования) в любое время года, в любое время суток, независимо от вида покрытия (бетон, асфальтобетон, грунт, в т.ч. покрытый снегом, песком, влагой, льдом) подстилающей поверхности вертолетной взлетно-посадочной площадки (далее - ВВПП) в различных климатических условиях, в простых и сложных метеорологических условиях, в том числе при визуальной видимости, близкой к нулю.
Заявляемые СВП и КПИ учитывают особенности конструкции и динамики движения вертолета и его управления, специфику его применения как транспортного средства, предназначенного для внеаэродромного использования, и неблагоприятное влияние внешних воздействующих факторов на безопасность полетов вертолетов.
Предпосылки создания изобретения
При летной эксплуатации исправных и управляемых одновинтовых вертолетов возникают проблемы, связанные с обеспечением безопасности полетов из-за непреднамеренного выхода вертолета на границы (за границы) летных эксплуатационных ограничений с последующей потерей управляемости при воздействии на вертолет неблагоприятных внешних возмущений, а также ошибок экипажа в технике пилотирования из-за недостаточности (дефицита) и низкого качества информационного обеспечения экипажа по пилотажным параметрам, а также из-за потери экипажем визуальной видимости окружающей среды закабинного пространства (визуальной видимости земных ориентиров) при попадании вертолета в условия образования снежного/пыльного вихря и/или в сложные метеорологические условия (СМУ).
С целью выявления причин возникновения авиационных происшествий и серьезных инцидентов (далее - АП и СИ) был проведен анализ состояния безопасности полетов при эксплуатации одновинтовых вертолетов типа Ми-8 и его модификаций, используемых в Гражданской и Государственной авиации (согласно классификации, приведенной в Воздушном Кодексе РФ). За период 2000-2009 гг. выявлено, что наряду с другими причинами возникновения АП и СИ доминирующими являются ошибочные действия экипажей. Анализы причин возникновения АП и СИ показывают, что экипажи не всегда используют имеющиеся резервы вертолета по устойчивости и управляемости для локализации особых ситуаций, возникающих в полете, а также допускают систематические ошибки в технике пилотирования при управлении исправным вертолетом из-за дефицита (недостаточности) и/или низкого качества информационного обеспечения по следующим факторам:
1. Внешние воздействующие факторы, влияющие на безопасность полетов в силу особенностей конструкции и аэродинамики вертолета, среди которых:
- скорость и направление ветра и ее продольная и боковая составляющие на всех этапах полета, особенно при выполнении взлетов и посадок на площадки, подобранные с воздуха, на которых отсутствует метеорологическое обеспечение полетов;
- техническое состояние ВВПП: продольные и поперечные углы наклона ВВПП, наличие препятствий, прочность грунта, низкая контрастность подстилающей поверхности, а иногда и неизвестное физическое состояние площадки (например, толщина льда, покрытого свежевыпавшим снегом);
- ошибочное определение экипажем максимально допустимых взлетных/посадочных масс вертолета, зависящих от фактических метеорологических условий (скорости и направления ветра, величины атмосферного давления, температуры наружного воздуха) в местах взлета и посадки из-за отсутствия на борту вертолета соответствующих измерителей;
- отсутствие информационного обеспечения о подвижных и неподвижных препятствиях и расстояния до них, опорах ЛЭП и проводах в зоне взлета и посадки вертолета в СМУ.
2. Недостаточность и низкое качество представления экипажу вертолета на индикаторах пилотажных параметров из-за неполного учета аэродинамических особенностей и динамики движения вертолета по следующим параметрам:
- о продольных и поперечных скоростях перемещения вертолета на этапах висения (зависания), перемещения относительно земной/водной поверхности на малых и предельно малых высотах в моменты приземления и отрыва, взлетах и посадках по-вертолетному;
- об угловой скорости вращения - угловой скорости рыскания на всех этапах полета, и особенно в моменты приземления в условиях плохой видимости и образования снежного/пыльного вихря;
- о малой приборной скорости в зонах взлета, посадки и руления.
3. Эргономические недостатки представления информации о параметрах положения органов управления вертолетом и их динамики движения, в то время когда эти параметры являются важными пилотажными параметрами и должны постоянно находиться в поле зрения пилотов практически на всех этапах полета, а именно:
- разнесенность (рассредоточенность) по приборной доске (информационному полю дисплея) информации о текущем положении ручки «ШАГ-ГАЗ» (углу установки лопастей несущего винта, далее - НВ), оборотах НВ (частоте вращения НВ), оборотах турбокомпрессоров силовых установок;
- отсутствие информации о темпе (скорости) перемещения ручки «ШАГ-ГАЗ», скорости перекладки педалей управления углами установки лопастей рулевого винта (РВ).
4. Отсутствие информационного обеспечения экипажа о характеристиках закабинного пространства (о перемещающейся линии искусственного горизонта, которая по своему положению и перемещению соответствует линии истинного горизонта, видимой членами экипажа из кабины вертолета в простых метеоусловиях) при попадании в условия потери визуального контакта с земными ориентирами и при образовании снежного/пыльного вихря или СМУ.
5. Отсутствие информационного обеспечения экипажа по предотвращению попадания вертолета в режим «вихревое кольцо» в зоне ограничений: приборная скорость-вертикальная скорость снижения-истинная высота полета.
6. Недостатки в обеспечении экипажа аварийно-предупреждающей сигнальной информацией по следующим параметрам:
- продольным и поперечным углам наклона ВВПП;
- продольным и поперечным составляющим скорости ветра;
- продольным и поперечным скоростям перемещения относительно подстилающей поверхности на малых высотах;
- угловой скорости вращения - скорости рыскания;
- критическим углам крена, тангажа на малых высотах в моменты приземления, отрыва, руления, перемещениях, зависания, висения;
- превышения максимально допустимых взлетных/посадочных масс в зависимости от фактических метеорологических условий;
- динамики движения органов управления: отсутствие визуальной, звуковой, тактильной предупреждающей и аварийной сигнальной информации о падении/превышении частоты вращения НВ, темпа перемещения ручки «ШАГ-ГАЗ» и темпа перемещения педалей управления рулевым винтом, установленных эксплуатационными ограничениями;
- сигнализации о минимально допустимой безопасной высоте полета (далее - МБВ), предназначенной для предотвращения столкновения вертолета с земной поверхностью и искусственными препятствиями на ней в зависимости от характера рельефа подстилающей поверхности (равнинная, холмистая, горная), скорости полета и используемых экипажем правил полета.
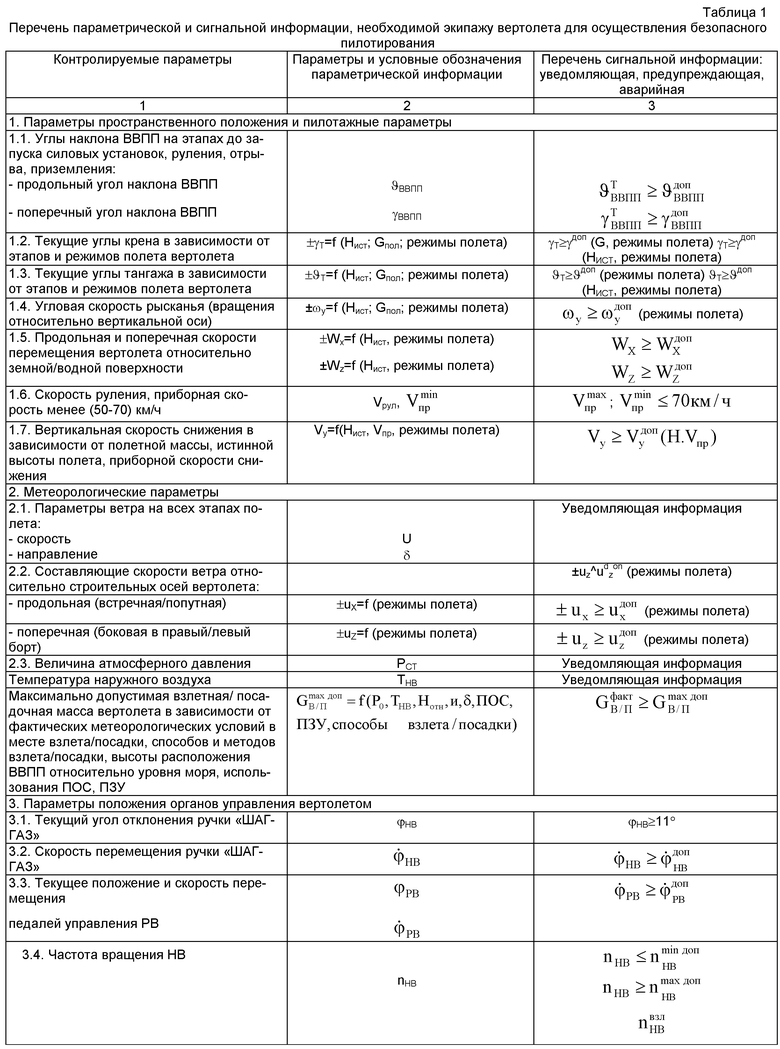
Для предотвращения ошибочных действий экипажа в управляемом полете и повышения уровня безопасности полета, связанных с предотвращением столкновения вертолета с земной поверхностью, препятствиями на ней и возможным опрокидыванием, а также потерей управляемости вертолета, возникает необходимость улучшить существующее информационное обеспечение экипажа, обеспечив его дополнительной параметрической и сигнальной информацией, приведенной в таблице 1.
Эта информация должна значительно улучшить визуализацию представления по пилотажно-навигационным параметрам, а также обеспечить экипаж четким и высококачественным интуитивно понятным отображением внешней среды закабинного пространства и препятствий на ней независимо от времени года, суток, фактических метеорологических условий, вида подстилающей поверхности, технических характеристик вида покрытия ВВПП в реальном режиме времени и обеспечить улучшенную инструментальную видимость закабинного пространства на этапах взлета, маневрирования на предельно малых высотах снижения и захода на посадку по-вертолетному и по-самолетному.
В связи с этим на индикаторах СВП формат представления (вид отображения) текущего динамического состояния вертолета учитывает особенности конструкции и динамики движения вертолета, неблагоприятное влияние внешних факторов и особенности его управления, летные ограничения по всем этапам и режимам полета. Это позволяет снизить психофизиологическую нагрузку на экипаж, уменьшить умственные усилия, связанные с необходимостью выполнения расчетов в уме при одновременном пилотировании вертолета в быстроменяющейся текущей аэродинамической обстановке, уменьшить время принятия решения по управлению вертолетом за счет применения когнитивных технологий и минимизации зон неопределенностей («зон сомнений»).
Использованные сокращения на английском языке:
1. HUD (Head-up display) - пилотажный индикатор на фоне лобового стекла остекления фонаря кабины экипажа.
2. IPFD (Integrated primary flight display) - интегрированный основной пилотажный дисплей
3. EFVS (Enhanced Flight Visual System) - система улучшенной инструментальной полетной видимости закабинного пространства
4. CVS (Combine visual system) - система комбинированной видимости, образованной путем наложения на EFVS символьной пилотажной информации
5. EGPWS/HTAWS (Enhanced Ground Proximity Warning System/Helicopter Terrain Avoidance Warning System) - улучшенная система предупреждения о близости земли с глобальной базой данных о высотном профиле подстилающей поверхности под вертолетом и в направлении полета.
6. SVS (Synthetic Vision System) - система синтезированного видения подстилающей поверхности.
7. ИЛС - индикатор на фоне лобового стекла остекления кабины пилотов.
8. МФИ - многофункциональный индикатор.
Результаты проведенного анализа состояния безопасности полетов вертолетов свидетельствует о том, что при существующем информационном обеспечении даже квалифицированный экипаж не в состоянии эффективно решать эти задачи и полностью использовать имеющиеся технические возможности вертолетов по управляемости и устойчивости для предотвращения АП и СИ в каждом конкретном полете, особенно в условиях попадания вертолета в СМУ на малых высотах и отсутствия на борту информационного обеспечения экипажа, приведенного в таблице 1.
Известны современные интегрированные комплексы бортового оборудования для одновинтовых вертолетов типа Ми-172 - ИБКВ-17 (1/179790.html), _novyie_vertoletyi_mi_na_maks20U.html), интегрированный бортовой комплекс оборудования ИБКО-38 вертолета Ми-38 (разработки компании ЗАО «Транзас», РФ), которые позволили значительно расширить функциональные возможности вертолета, повысить в некоторой степени безопасность полетов, придать кабине экипажа эргономичный и современный вид с применением концепции «стеклянной кабины» компании Honeywell (США).
Комплекс ИБКВ-17 обеспечивает пилотирование и навигацию вертолета днем и ночью в простых и сложных метеоусловиях экипажем, состоящим из двух пилотов, инструментальный заход на посадку (при установке дополнительного оборудования - по II категории ИКАО), заход на посадку по сигналам GPS/ГЛОНАСС, автоматический контроль работы вертолетного оборудования. Дублированная вычислительная система вертолетовождения обеспечивает непрерывное счисление текущих координат места вертолета и коррекцию по данным автономных средств навигации (автоматическую или по команде экипажа).
Навигационная информация наложена на подвижную карту, на которую выводится изображение подстилающей поверхности, формируемое системой раннего предупреждения приближения к земле, и изображение от метеолокатора. Дополнительно может выводиться изображение от различных оптических систем и видеокамер, установленных на борту.
Повышение безопасности полета обеспечивается при помощи современных средств навигации, посадки и связи, гарантируется безопасность маловысотного полета за счет применения системы раннего предупреждения приближения к земле. Кроме того, комплекс адаптирован для работы с очками ночного видения.
Однако недостатками вышеназванных интегрированных комплексов являются ограниченный объем информации, предоставляемой экипажу для безопасного пилотирования вертолета на всех этапах и режимах полета, связанный с неполным учетом аэродинамических особенностей и особенностей управления вертолетом, влияния внешних воздействующих факторов на безопасность полетов, особенно это касается выполнения взлетов и посадок в условиях образования пыльного/снежного вихря, отсутствие информации о фактических метеорологический условиях в местах взлета и посадки, и, особенно, неизвестного воздействия ветра и недостоверной информации о техническом состоянии вертолетных взлетно-посадочных площадок, в частности фактических продольных и поперечных углов наклона подстилающей поверхности, наличия препятствий на ней. Т.е. отсутствует информационное обеспечение экипажа по разделам 2, 3, 4 таблицы 1, отсутствует аварийно-предупреждающая сигнальная информация на малых и предельно малых высотах, связанная с особенностями динамики полета вертолета (частично имеется информация по пп.1.2 и 1.3).
В настоящее время известен ряд иностранных аэрокосмических компаний, занимающихся разработкой новых технологий, которые предназначены для обеспечения взлета и посадки воздушных судов в крайне неблагоприятных метеорологических условиях, например в условиях низкой облачности и видимости менее 30 метров.
США, Великобритания, Франция и Германия активно участвуют в попытках решить проблему обеспечения безопасности полетов вертолетов. Однако на сегодняшний день готовых решений не найдено (www, aviationtoday. com/regions/usa).
Лидерами в этой области являются Sikorsky Aircraft Corp. (США), Rockwell Collins Inc. (США), Gulfstream Aerospace Corporation (США), Honeywell International (США), Garmin (США), Aspen Avionics (США), Eads Deutschland GmbH (Германия), Thales (Франция) и ряд других.
Аэрокосмическая компания Honeywell International разработала новую технологию для самолетов под названием Enhanced Flight Visual System / Synthetic Vision System (EFVS/SVS) - система улучшенной инструментальной полетной видимости закабинного пространства/система синтезированного видения подстилающей поверхности. Система SVS представляет экипажу базу данных и графическую 3D-визуализацию маршрутов воздушных судов, показывая на индикаторе в схематическом виде поверхность земли, над которой летит воздушное судно, и возможные препятствия на ней.
Новая система EFVS работает с инфракрасными сенсорами, установленными на «носу» самолета, и получает реальные данные отображения земной поверхности, «накладывая» их на данные SVS. Совместно два массива данных позволяют экипажу наблюдать местность в зоне взлета и посадки воздушного судна, как в «ясный день». Отображение информации осуществляется на пилотажных дисплеях Honeywell (IPED), представляющих собой ЖК-экраны, установленные на приборной панели в кабине пилота. Система EFVS/SVS используется на воздушных судах типа Gulfstream. В настоящее время система EFVS тестируется на вертолетах. Несмотря на решение одной из главных проблем вертолета - обеспечения экипажа улучшенной инструментальной (приборной) видимостью закабинного пространства подстилающей поверхности в зонах взлета и посадки вертолета, вышеназванная система не решает задачу по обеспечению безопасности полетов вертолетов в комплексе, как показано в таблице 1 в пп.1, 2, 3 из-за ограниченного объема выдачи информации, необходимой экипажу для обеспечения безопасности полета на всех его этапах и режимах.
Известно, что фирма Honeywell International совместно с другими американскими фирмами - Sikorsky Aircraft Corp., Sierra Nevada Corp. работает над новой системой посадки вертолетов - «Sandblaster», предназначенной для обеспечения безопасности полетов в условиях образования пыльного/снежного вихря при нулевой видимости и/или отсутствии у экипажа достоверных сведений о местности в районе посадки, с использованием миллиметрового радара (ММ3) и лазерного радара (LADAR). В системе использованы современные технологии визуализации закабинного пространства подстилающей поверхности, датчики, которой «видят» земную поверхность сквозь облако пыли, системы синтетического видения и совместной обработки данных. Нажатием одной кнопки приводится в действие автоматическая система управления вертолетом (разработка Sikorsky Aircraft Corp.), которая переводит его из режима полета в режим висения на низкой высоте над заранее заданной посадочной площадкой практически без смещения. В процессе приближения к земле трехмерный радар (разработка Sierra Nevada Corp.), действие которого возможно сквозь песок и пыль, обнаруживает препятствия и объекты, находящиеся в зоне посадки. На бортовой индикатор выводятся трехмерное изображение зоны посадки и окружающая ее местность, полученное от радара, датчика локального наружного наблюдения (SLEEK - разработка Honeywell International) и системы синтезированного видения подстилающей поверхности (SVS). Система позволяет обнаруживать препятствия и объекты в районе приземления в пределах 360°.
Испытания системы безопасности на вертолете BLACK HAWK в январе 2009 г. показали, что экипаж может безопасно посадить вертолет на площадку со множеством опасных препятствий и имеющую к тому же уклон. [110VgnVCM1000004f62529fRCRD]. Однако необходимо иметь в виду и то, чтобы обеспечить полную безопасность в управляемом полете, необходимо дополнительно решить и задачи, показанные в таблице 1 пп.1, 2, 3.
В настоящее время фирма Sikorsky Aircraft Corp. ведет работы по контракту с DARPA {Defense Advanced Research Projects Agency - агентство передовых оборонных исследовательских проектов - Министерства обороны США) новой системы посадки для вертолетов «Sandblaster», предназначенной для отображения окружающей среды, используя 94 ГГц радар, который позволяет пилоту видеть земную поверхность «сквозь» облако ().
Разработка систем инструментальной видимости закабинного пространства, функционирующих в реальном режиме времени, и синтезированной видимости закабинного пространства ведутся в соотв етствии с требованиями стандарта США RTCA DO-315 «Minimum Aviation System Performance Standard (MASPS) for Enhanced Vision Systems (EVS), Synthetic Vision Systems (SVS), Combine Vision Systems (CVS) and Enhanced Flight Vision Systems (EFVS)».
Программа, аналогичная американской «Sandblaster», существует в Великобритании под названием «LVL» (Low-Visibility Landing - посадка при низкой видимости) - (09/sandblaster-and-lvl-clear-air).
В рамках работы над «LVL» разработчики пытаются найти решение, которое бы позволило пилоту иметь визуальную информацию о технических характеристиках зоны приземления и которая бы отражалась на лобовом стекле или в виде нашлемной индикации. «LVL» так же, как и система «Sandblaster», базируется на технологии совместной обработки данных (от LADAR, инфракрасного и миллиметрового радаров), наложенных на базу данных о рельефе местности. В данной работе принимает участие компания Atlantic Inertial Systems - AIS (ранее BAE Systems Inertial Products) - разработчик системы TERPROM - системы обнаружения препятствий.
Система «LVL» должна обеспечить данные о точном положении вертолета по отношению к препятствию, а также устранения ошибок в картах. Она может работать в отсутствии GPS. Интегрируя данные о препятствиях с данными активных датчиков, получают полную картину зоны приземления в реальном времени непосредственно до входа вертолета в облако пыли.
Однако так же, как и описанные выше системы, «LVL» не решает проблемы обеспечения безопасности полетов, связанные с внешними воздействующими факторами на вертолет (влияние ветра, углов наклона взлетно-посадочных площадок, дополнительная просадка пневматиков шасси в малопрочный грунт), с особенностями управления вертолетом (темп перемещения рычага управления углами установки лопастей НВ, темп перемещения педалей управления углами установки РВ, падение или превышение частоты вращения НВ) и эргономическими недостатками по представлению экипажу параметрической и сигнальной информации, необходимой экипажу для безопасного пилотирования. Т.е. успешно решаются только проблемы, приведенные в п.4 таблицы 1.
Известен патент США №7642929, G01C 23/00, опубл. 05.01.2010, в котором раскрывается система информационной поддержки экипажа при посадке вертолета. Своим возникновением она обязана военным операциям в Ираке, Саудовской Аравии и Афганистане. Во время посадки вертолет поднимал облако пыли и песка высотой до 100 футов так, что площадка для приземления скрывалась из виду. В соответствии с формулой изобретения вертолет оснащен камерами (например, инфракрасной камерой) и датчиками, которые выявляют наличие препятствий на площадке для предотвращения столкновения с ними при приземлении до того, как образуется облако пыли. В качестве датчика используют камеру ночного видения или электронный радар (либо LADAR). Сигналы с датчиков поступают в память компьютера. Имеется также инерциальная навигационная система, обрабатывающая выходные сигналы системы управления вертолетом. Это могут быть сигналы крена, тангажа, рысканья, а также информация о высоте и скорости вертолета. Имеется возможность получить 3-мерное изображение окружающего ландшафта при приземлении. Данные отображаются на обычном экране катодной трубки, либо на индикаторах на лобовом стекле, либо на нашлемных индикаторах. Благодаря целому ряду алгоритмов формируется изображение в реальном масштабе времени. Однако данная система также имеет ряд недостатков в информационном обеспечении, среди которых отсутствие информации:
- о скорости и направлении ветра на всех этапах полета, и особенно на этапах взлета и посадки по-вертолетному;
- о максимально допустимых взлетных/посадочных массах, зависящих от фактических метеорологических условий в месте взлета и посадки вертолета;
- об особенностях управления вертолетом (темп управления общим шагом НВ, темпам перекладки педалей управления РВ);
- о сигнальной информации по падению и превышению частоты вращения НВ установленных эксплуатационных ограничений, о продольной и поперечной скоростях перемещения вертолета на малых и предельно малых высотах.
Т.е. отсутствует информация по пп.1.1, т.к. точность определения углов наклона ВВПП в этом патенте превышает 10°, что не удовлетворяет требованиям безопасного приземления вертолета (которые составляют 3°), а также отсутствует информационное обеспечение по пп.1.6, 2.1, 2.2, 2.3, 3.1, 3.2, 3.3, 3.4, приведенных в таблице 1.
Известен также патент США №7091881, G01C 21/00, опубл. 15.08.2006, в котором описаны вертолетные средства, предназначенные для безопасного приземления в условиях образования пыльного/снежного вихря и низкой видимости, которые используют отображения окружающего пространства и данные о динамике движения вертолета, полученные с помощью различных датчиков первичной информации, которые непрерывно обновляются и представляются экипажу через шину данных. В этом же патенте представлена интегрированная дисплейная система, включающая основной пилотажный дисплей и дисплей висения, которые используются в условиях плохой видимости. Дисплей висения может также содержать индикатор истинной высоты, замеренной радаром, символы отклонения от заданного курса и символы бокового смещения, что позволяет летчикам обнаружить отклонение от курса, которое часто имеет место в условиях плохой видимости. Данный дисплей обеспечивает летчика информацией о текущем значении высоты над землей и имеет сигнализацию об опасной скорости сближения вертолета с препятствиями на земной поверхности. Например, ленточный индикатор снижения может иметь зеленый фон, если скорость сближения с землей в пределах нормы, желтый фон, если значения приближаются к критическим, красный, если значения вышли за критические режимы. Дисплей висения включает систему отображения отклонения вертолета от заданного курса, индикатор бокового и продольного перемещения вертолета в режиме висения.
Недостатком данных технических решений является то, что вертолетная интегрированная дисплейная система может использоваться в СМУ в режиме висения для балансировки вертолета, но не обеспечивает экипаж вертолета визуальным контактом с земными ориентирами, а также полными пилотажными параметрами, необходимыми для безопасной эксплуатации вертолета. Т.е. отсутствует информационное обеспечение по пп.1.1; 1.6; 2.1; 2.2; 2.3; 3.1; 3.3; 3.4; 4.1; 4.2, приведенным в таблице 1.
Известен патент EP №1906151, G01C 23/00, опубл. 02.04.2008, в котором предложен индикатор для отображения посадочной площадки, где с высоким разрешением показана площадка до того момента, когда вертолет создает пыльный/снежный вихрь во время посадки. Для этого используется инерциальная навигационная система (либо отдельная система). При этом согласно изобретению изображение трансформируется для отображения с нужной точки обзора, при этом оно накладывается на текущее положение вертолета по отношению к посадочной площадке. К тому же на индикаторе отражаются препятствия, находящиеся в зоне посадки. Таким образом, система значительно улучшает ориентацию летчика, обеспечивая безопасную посадку даже при нулевой видимости. В основе изобретения лежит узел обработки (например, компьютер). Имеются также другие логические цепи. В компьютер из навигационной системы, которая оснащена приемником GPS, поступает информация о текущем местоположении вертолета. Может быть использована и автономная навигационная система вертолета. Дополнительная информация может быть получена из навигационной базы самого вертолета, которая включает полетное задание, координаты заданного места посадки и профиль местности с препятствиями. Эта система позволяет точно сориентировать в нужном направлении датчик цифрового изображения (например, цифровую камеру), смонтированный на рамке. С камерой синхронизирован импульсный источник света. Как правило, по мере приближения к земле производится ряд снимков до потери визуальной видимости подстилающей поверхности из-за попадания вертолета в зону снежного/пыльного вихря, которые в последующем используются для приземления вертолета в условиях отсутствия видимости земной поверхности.
Один или более лазерных дальномеров центрированы с камерой и предоставляют информацию о степени наклона посадочной площадки. В это время дополнительный лазерный дальномер, направленный вниз, или радарный высотомер предоставляют информацию о расстоянии до земли. Множество лазерных дальномеров или прожектор помогают выявить наклон поверхности. Используется также РЛС миллиметрового диапазона, которая на определенной частоте может «видеть сквозь» облако пыли в реальном времени, или инфракрасный радар (FLIR), направленный вперед, который может отобразить подстилающую поверхность без использования РЛС. Полученное изображение поступает на процессор, который делает изображение более четким благодаря 3D графике, накладывая на него либо в виде текста, либо в виде графики информацию о текущем положении вертолета по отношению к посадочной площадке. При этом это изображение можно показать с любой точки обзора на индикаторе. Однако вышеназванная система не может обеспечить полную безопасность полета вертолета при выполнении полетов на площадки, подобранные с воздуха, поскольку в базе данных вертолетного компьютера отсутствует информационное обеспечение по характеристикам рельефа местности предполагаемого места приземления вертолета. Также система не учитывает влияния на вертолет внешних воздействующих факторов:
- метеорологических условий в зоне приземления и взлета, в частности отсутствует информационное обеспечение экипажа о скорости и направлении ветра, температуре наружного воздуха и величине атмосферного давления, которые непосредственно влияют на безопасность полета вертолета;
- технических характеристик взлетно-посадочной площадки (продольные и поперечные углы наклона, плотность грунта, возможность просадки пневматиков колес стоек шасси вертолета в малопрочный грунт), которые могут привести к опрокидыванию вертолета;
- максимально допустимых взлетных/ посадочных масс в месте взлета и посадки, зависящих от фактических метеорологических условий полета;
- особенности динамики полета вертолета, связанные с управлением вертолетом, в частности отсутствует информационное обеспечение по темпу перемещения управления общим шагом НВ.
Наиболее близким аналогом по своей сущности к вертолетным средствам визуализации полета (СВП), предназначенным для повышения уровня безопасности полетов, являются известные средства, показанные в заявке США на изобретение №2010073198, G08B 21/00, опубл. 25.03.2010. В ней описаны человеко-машинный интерфейс, предназначенный для предотвращения столкновения вертолета с подстилающей поверхностью и препятствиями на ней, а также потери управляемости вертолета в СМУ в зоне взлета и посадки. Данный интерфейс описывает средства получения отображения подстилающей поверхности, на которые дополнительно накладывается символьное отображение параметрической информации, необходимое для безопасного пилотирования вертолета, а именно:
- высота над землей;
- координаты пространственного положения вертолета: углы крена, тангажа и курса;
- путевая скорость;
- вертикальная скорость;
- угловая скорость вращения;
- информация о наличии препятствий в зоне приземления;
- координаты места приземления, которые были заранее выбраны при подготовке к полету;
- текущее удаление до места приземления.
Визуализация отображения места приземления (инструментальная видимость закабинного пространства), на которое накладывается параметрическая пилотажная информация, значительно снижает психофизиологическую нагрузку на экипаж, создавая благоприятные условия для пилотирования вертолета, которые интуитивно напоминают экипажу визуальные условия захода на посадку.
При этом формируется виртуальная плоскость истинного горизонта, на которую накладывают виртуальный рельеф местности в зоне приземления вертолета. Причем плоскость истинного горизонта постоянно обновляется в зависимости от высоты полета вертолета. Отображение рельефа местности может быть выполнено в 3D проекции. Для формирования подобного отображения полетной информации в зоне приземления при отсутствии визуальной видимости земных ориентиров используется множество датчиков первичной информации. Среди них - измерители истинной высоты полета, путевой скорости, параметров пространственного положения вертолета и средства получения отображения земной поверхности в зоне приземления: радары, LADARS, телевизионные и тепловизионные камеры, которые позволяют получить отображение земной поверхности даже в условиях отсутствия визуальной видимости подстилающей поверхности.
Формируется аварийно-предупреждающая сигнализация (визуальная и звуковая) в зависимости от удаленности препятствия на расстоянии от ½ до 2 диаметров НВ вертолета, при этом графическое отображение рельефа земной поверхности осуществляется с помощью цветной графики.
Несмотря на успешное решение вопроса обеспечения безопасности полета при заходе на посадку в условиях образования снежного/пыльного вихря из-за потери визуальной видимости земных ориентиров экипажем, данная система не решает ряд вопросов.
Основным недостатком этого технического решения являются заниженные функциональные возможности системы визуализации полета, которая реализована по известным принципам для самолетов и не учитывает особенности вертолета.
А именно, что:
- из-за отсутствия технических средств для измерения параметров динамики движения вертолета соответственно отсутствуют контролируемые параметры по пп.1.1, 1.4, 1.5, 1.7;
- из-за отсутствия технических средств для определения метеорологических параметров в зонах взлета и посадки вертолета на необорудованные ВВПП соответственно отсутствуют контролируемые параметры по пп.2.1, 2.2, 2.3;
- из-за отсутствия технических средств для определения параметров положения органов управления вертолетом и скорости их перемещения отсутствуют контролируемые параметры по пп.3.1, 3.2, 3.3, 3.4.
Это приводит к отсутствию аварийно-предупреждающей сигнальной информации по вышеперечисленным параметрам по графе 3 таблицы 1.
Наиболее близким аналогом (прототипом) к заявляемому вертолетному когнитивному пилотажному индикатору (КПИ) является дисплейная система вертолетных систем визуализации параметров полета и закабинного пространства, описанная в европейском патенте №874222, G01C 23/00, опубл. 28.10.1998.
Эта дисплейная система использует синтезированное электронное отображение пилотажных и навигационных параметров вертолета. Управление индикацией осуществляется с помощью кнопок, расположенных на обрамлении дисплея. В навигационном режиме на экране дисплея отображается картографическая информация, на которую наложена аэронавигационная информация и на которой одновременно отображаются текущие навигационные параметры движения вертолета.
Для пилотировании вертолета в СМУ на информационное поле дисплея, отображающее радиолокационное изображение подстилающей поверхности, накладывается сгенерированное символьное отображение пилотажных параметров, полученных от различных источников первичной информации, и информация от навигационной системы вертолета. Дисплейная система содержит два дисплея, расположенных в одном корпусе. Причем на одном из них отображается стандартная пилотажная информация, а на другом - навигационная информация.
Формат отображения пилотажной информации представляет собой отображение подвижной линии искусственного горизонта, принятое США (вид на линию горизонта из кабины экипажа в визуальном полете), скорости и высоты полета, вертикальной скорости, углов крена и тангажа, которые представляются экипажу в виде круговых шкал со стрелками. Некоторые параметры представлены в виде цифровых данных: путевая скорость, величина атмосферного давления, координаты местоположения, курс. Представление пилотажной информации выполнено в соответствии с требованиями авиационных правил в Т-конфигурации.
Для предотвращения столкновения вертолета с рельефом и искусственными препятствиями на дисплей выводится информация в виде векторных электронных карт рельефа местности, которая отображается в реальном режиме времени на этапах подхода вертолета к аэродрому и выхода из зоны аэродрома.
Для навигационных целей используется цифровая 3D-карта, а для захода на посадку в СМУ и в условиях образования пыльного/снежного вихря - радиолокационное отображение подстилающей поверхности.
Главным недостатком дисплейной системы является недостаточный объем (дефицит) параметрической и сигнальной информации, представляемой экипажу от момента запуска силовых установок и раскрутки трансмиссии с целью выполнения полета до выключения силовых установок на стоянке после окончания полета.
Таким образом, вышеперечисленные системы не позволяют определить параметры внешних воздействующих факторов на вертолет, параметры органов управления, параметры динамики перемещения вертолета, которые непосредственно влияют на безопасность полета. В отсутствии этой информации на индикаторе экипаж допускает систематические ошибки, приводящие к АП и СИ.
В частности, экипажи вертолетов не обеспечены информацией:
- о продольных и поперечных составляющих скорости ветра на всех этапах полета, и самое главное, на этапах маневрирования вертолета на малых высотах взлета и посадки;
- о фактических метеорологических условиях полета в местах взлета и посадки вертолета: скорости и метеорологическом направлении ветра, температуре наружного воздуха и величине атмосферного давления и, соответственно, информации о максимально допустимых взлетных/посадочных массах, зависящих от видов и способов взлета/посадки и фактических метеорологических условий;
- о продольных и поперечных углах наклона вертолетных взлетно-посадочных площадок, о величине критического крена в моменты взлета и посадки вертолета и на этапах руления, в том числе углах наклона, образованных за счет неравномерной просадки колес стоек шасси в малопрочный грунт или проваливания под лед;
- о скорости перемещения ручки «ШАГ-ГАЗ» и темпе перекладки педалей управления углами установки лопастей РВ;
о падении частоты вращения НВ ниже установленных эксплуатационных ограничений или их превышений;
сигнальной информацией: уведомляющей, предупреждающей и аварийной, приведенной в таблице 1 настоящей заявки на изобретение.
Техническим результатом первого изобретения является создание улучшенной системы визуализации параметров полета и закабинного пространства, функционирующей при любых метеорологических условиях на всех этапах и режимах полета вертолета независимо от технических характеристик подстилающей поверхности, включающей улучшенную бортовую систему аварийно-предупреждающей сигнальной информации, за счет разработки дополнительных электронных измерительно-вычислительных комплексов и существенного расширения функциональных возможностей существующих бортовых систем вертолета.
Техническим результатом второго изобретения является разработка нового формата представления пилотажно-навигационной информации, выполненного с применением когнитивных технологий, который позволяет экипажу осуществить эффективный ручной вывод вертолета из любого пространственного положения в безопасный режим полета.
Технический результат достигается тем, что система визуализации полета одновинтового вертолета содержит когнитивный пилотажный индикатор, пилотажный индикатор на фоне лобового стекла остекления кабины экипажа, средства формирования и отображения улучшенной инструментальной видимости закабинного пространства, содержащие вычислитель комплексирования видеоизображений, полученных от формирователей изображения закабинного пространства, функционирующие в реальном масштабе времени, средства формирования улучшенной инструментальной видимости закабинного пространства на этапах набора высоты, горизонтального полета, снижения до высоты принятия решений, содержащие базу данных о рельефе местности в 3D-формате повышенной точности с реализацией алгоритма «впередсмотрящего», многоканальный панорамный приемник воздушных давлений набегающего воздушного потока и индуктивного потока и температуры заторможенного потока воздуха, электронный измерительно-вычислительный комплекс определения параметров пространственного положения, дополнительно определяющий параметры динамики движения, навигационные параметры, продольно-поперечные углы наклона взлетно-посадочной площадки, электронный измерительно-вычислительный комплекс определения высотно-скоростных параметров, дополнительно определяющий метеорологические параметры окружающей среды на всех этапах и режимах полета и максимально допустимую взлетно-посадочную массу, электронный измерительно-вычислительный комплекс определения параметров управления, определяющий дополнительно параметры динамики перемещения органов управления, многоканальный многорежимный приемник спутниковой навигационной системы, дополнительно определяющий параметры пространственного положения, угол сноса, истинную высоту полета и обеспечивающий экипаж спутниковой связью и Интернетом, улучшенную бортовую систему аварийно-предупреждающей сигнальной информации, содержащую дополнительно источники речевой информации, звуковой тональной сигнализации, звуковых сигналов сильного привлекающего действия, визуальные сигнализаторы сильного привлекающего действия и вибротактильные сигнализаторы, взаимодействующие через мультиплексный канал информационного обмена с упомянутыми электронными измерительно-вычислительными комплексами, содержащими блок памяти пороговых значений контролируемых параметров. При этом пилотажный индикатор на фоне лобового стекла остекления кабины экипажа может содержать инструментальное отображение закабинного пространства и препятствий на нем в реальном режиме времени. На него накладывается символьное отображение параметров пространственного положения и динамики перемещения вертолета, высотно-скоростные параметры с отображением метеорологических параметров в зонах взлета и посадки, параметров органов управления и их динамики перемещения, параметров продольных и поперечных углов наклона взлетно-посадочных площадок, аварийно-предупреждающую сигнальную информацию по вышеперечисленным параметрам с применением когнитивных технологий. В качестве формирователей улучшенного изображения закабинного пространства могут быть использованы ММ-радиолокатор, ТВ-приемник, ИК-радар, лазерный радар, выходы которых связаны с входом вычислителя комплексирования видеоизображения. Многоканальный панорамный приемник воздушных сигналов может быть выполнен в виде приемника воздушных давлений набегающего потока воздуха, индуктивного потока воздуха, образованного от работы несущего винта, ветра, и содержит камеру полного торможения воздушных потоков, где размещены датчики температуры и статического давления заторможенного потока воздуха.
Другой технический результат достигается тем, что на когнитивном пилотажном индикаторе дополнительно к существующим стандартным пилотажным параметрам отображены параметры динамики движения, параметры органов управления и динамики их перемещения, метеорологические параметры на всех режима полета, а также максимально допустимая взлетно-посадочная масса, символ предварительной и/или окончательной оценки продольных и поперечных углов наклона взлетно-посадочной площадки и характера препятствий на ней, а также визуальная аварийно-предупреждающая сигнальная информация по вышеперечисленным параметрам, а индикация параметров пространственного положения представляет собой макет вертолета/самолета, движущегося по крену на фоне подвижной линии относительно неподвижной условной линии горизонта и на фоне подвижной линии, разделяющей «пространство неба» и «плоскость земли», при этом направление перемещения органов управления соответствует перемещению макета в ту же сторону как по темпу, так и по соразмерности движения органов управления и вращению и перемещению самого вертолета относительно плоскости земного горизонта. В однооконном формате представления пилотажной параметрической и сигнальной информации, имеющей верхние и нижние пределы, отображены цифровые счетчики-сигнализаторы, неподвижные/подвижные индексы, всплывающие индексы, всплывающие текстовые сообщения, изменяющие свой цвет и цвет фона в зависимости от величины текущего значения контролируемого параметра и от алгоритмов работы улучшенной бортовой системы аварийно-предупреждающей сигнальной информации. При этом однооконный формат представления пилотажной параметрической и сигнальной информации выполнен в виде функционально сгруппированных указателей пилотажных параметров, которые находятся в непосредственной близости от указателей параметров пространственного положения
Сущность предложенных технических решений поясняется чертежами:
Фиг.1 - структурная схема СВП для командира вертолета (левого пилота);
Фиг.2 - формат визуального отображения параметрической и сигнальной информации на КПИ с визуализацией параметров динамики движения вертолета, пространственного положения, параметров управления, параметров ВВФ и жизненно важных навигационных параметров;
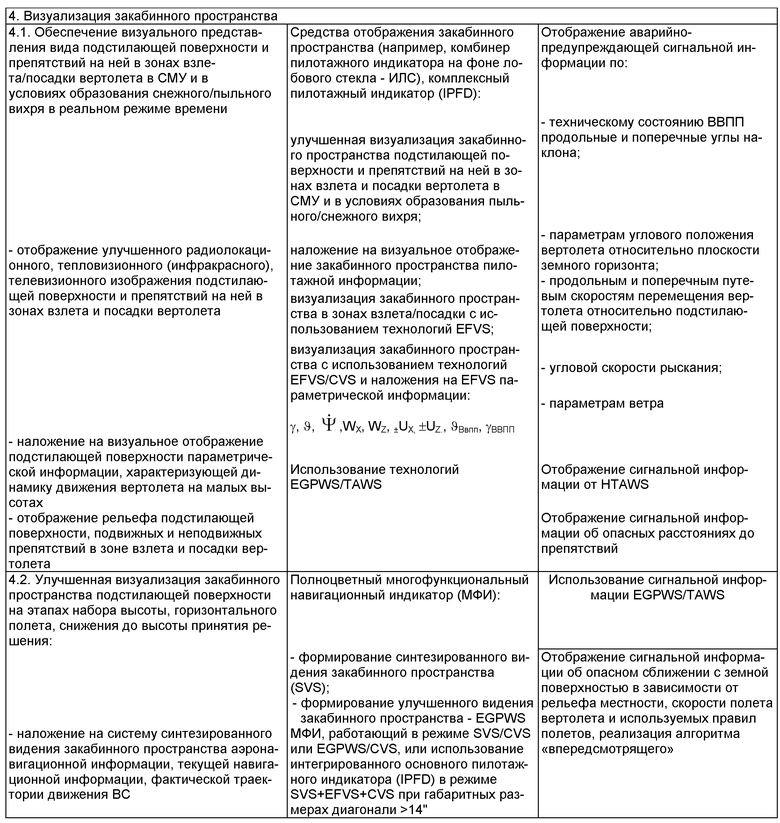
Фиг.3 - формат визуального отображения на КПИ параметрической и сигнальной информации о текущем положении органов управления вертолетом и динамике их перемещения;
Фиг.4 - формат визуального отображения на КПИ параметрической и сигнальной информации о пространственном положении вертолета и динамики его движения;
Фиг.5 - формат визуального отображения на КПИ параметрической и сигнальной информации о высотных параметрах вертолета и вертикальной скорости;
Фиг.6 - формат визуального отображения на КПИ параметрической и сигнальной информации о метеорологических условиях полета и максимально допустимых взлетных и посадочных массах вертолета в зависимости от фактических метеорологических условий, способов взлета/посадки, используемых правил полетов (Правил полетов по приборам или Правил визуальных полетов), использования противообледенительных средств (ПОС), пылезащитных устройств (ПЗУ);
СВП (Фиг.1) содержит:
1. Средства отображения информации: когнитивный пилотажный индикатор -КПИ 1, комбинер 2 пилотажного индикатора на фоне лобового стекла фонаря кабины экипажа (ИЛС), навигационный индикатор 3.
2. Технические средства для формирования системы отображения закабинного пространства (СОЗП) и препятствий на ней, включающую формирователи изображения закабинного пространства: ТВ-приемник 4, ММ-радар 5 (миллиметровый радиолокатор), радар 6 инфракрасного изображения (ИК-радар), оптический лазерный радар 7, вычислитель 8 комплексирования видеоизображений, полученных от формирователей изображения, для отображения улучшенной видимости закабинного пространства подстилающей поверхности и препятствий на ней.
3. Многоканальный, многорежимный корректор 9 спутниковой навигационной системы ГЛОНАСС/GPS - (МРК 9 СНС).
4. Дополнительные электронные блоки, образующие измерительно-вычислительные комплексы:
- многоканальный панорамный приемник 10 воздушных сигналов - МПВС;
- блок 11 определения высотно-скоростных и метеорологических параметров (БВС и МП);
- блок 12 определения параметров пространственного положения и динамики движения (БПП и ДД);
- блок 13 определения параметров положения органов управления вертолетом и динамики их перемещения (БПУ);
- блок 14 бортовой системы аварийной сигнализации (БСАС).
СВП взаимодействует со стандартными электронными блоками ИКБО вертолета, в частности с радиовысотомером и бортовыми радиотехническими средствами 15 связи и навигации (РТС), а также бортовым устройством регистрации режимов полета, системой автоматического управления, вычислительной системой вертолетовождения и др. (на схеме не показаны).
Для информационного обмена между собственными измерительно-вычислительными комплексами и электронными устройствами, входящими в состав ИКБО вертолета, СВП использует системную шину - мультиплексный канал 16 информационного обмена - МКИО.
Система отображения информации СВП более детально содержит:
- когнитивный пилотажный индикатор 1 (КПИ) - полноцветный пилотажный индикатор с диагональю 10'', 12'', 14'', например, МФЦИ - 0333М (многофункциональный цветовой индикатор) производства ОАО «ЭЛАРА» или TDS-12 производства ЗАО ТРАНЗАС, который соединен по цифровым линиям связи с МКИО 16;
- комбинер 2 ИЛС (например, Head-up Display фирмы Rockwell Collins Inc.) - прозрачный оптический дисплей, на котором отображается видеоизображение постилающей поверхности и препятствий на ней в зонах взлета и посадки вертолета, полученная от бортового ММ радара 5, ИК-радара 6, тепловизионного или телевизионного приемников 4, или лазерного радара 7, которые могут входить в качестве первичных источников информации в систему улучшенного полетного видения. На эту информацию накладывается символьное отображение параметров пространственного положения вертолета, параметры динамики движения вертолета, параметры органов управления и динамики их перемещения, параметры внешних воздействующих факторов (ВВФ) и сигнальная информация по этим же параметрам. Полученная система комбинированного видения (отображение закабинного пространства в реальном режиме времени, на которое наложено символьное отображение параметрической и сигнальной информации, приведенной выше) отличается для вертолета в лучшую сторону от известной системы CVS фирмы Rockwell Collins, полученной путем наложения EFVS и SVS, т.к. вся необходимая экипажу информация для предотвращения АП и СИ, а именно пилотажная информация и информация о состоянии закабинного пространства в зонах взлета и посадки, сосредоточена на одном индикаторе - комбинере 2 ИЛС;
- навигационный индикатор 3, предназначенный для отображения навигационных параметров и содержащий многооконный формат представления навигационной информации. Управление форматами осуществляется с помощью кнопок, расположенных на обрамлении индикатора, при этом на НИ отображаются:
- графическое изображение плана полета с координатами исходного пункта, поворотных пунктов и конечного пункта маршрута;
- текущая аэронавигационная информация;
- траектория движения, текущее местоположение, путевая скорость, время прибытия в пункты маршрута;
- отображение от метеорадиолокатора;
- схемы выхода, подхода, захода на посадку, а также схемы руления аэродромов, например фирмы Jeppesen, схемы вертолетных взлетно-посадочных площадок.
Отличием является улучшенное отображение закабинного пространства, наличие новой системы предупреждения о близости земли с функцией оценки рельефа местности не только под вертолетом, но и в направлении полета (реализован алгоритм «впередсмотрящего»), наличие аварийно-предупреждающей сигнализации, функционирующей со статическим и динамическим упреждением сигнала предупреждения о минимально безопасной высоте (МБВ) полета в зависимости от характеристик рельефа подстилающей поверхности и скорости полета. При этом визуальный сигнал по МБВ дублируется звуковым сигналом вне зависимости от режима отображения на НИ, выбранного пилотом.
Система отображения закабинного пространства (СОЗП) и препятствий на ней, предназначенная для представления экипажу улучшенного изображения подстилающей поверхности, аппаратно содержит:
- ТВпр 4 - телевизионный приемник с высокой разрешающей способностью, применяемый для отображения вида подстилающей поверхности и препятствий на ней в реальном режиме времени и контроля за состоянием груза на внешней подвеске вертолета;
- ММ-радар 5 - миллиметровый радиолокатор, предназначенный для получения радиолокационного отображения подстилающей поверхности и препятствий на ней в реальном режиме времени при отсутствии визуальной видимости земной поверхности, адаптированный для работ в любых метеоусловиях и для любых характеристик подстилающей поверхности;
- ИК-радар 6 - инфракрасный локатор - формирователь отображения закабинного пространства переднего обзора для захода на посадку на местность со сложным рельефом;
- оптический лазерный радар 7, предназначенный для определения истинной высоты полета и предварительного определения углов наклона ВВПП, топографической съемки рельефа местности в зоне приземления и взлета вертолета. Для предварительной оценки продольных и поперечных углов наклона ВВПП, подобранных с воздуха, могут использоваться несколько оптических лазерных радаров.
Различные комбинации применения средств изображения подстилающей поверхности, например ТВпр 4+ММ 5, ММ 5+ИК 6, ИК 6+ТВпр 4, ИК 6+лазерный радар 7+ММ 5 и другие варианты сочетания формирователей отображения закабинного пространства и препятствий, выбираются заказчиком в зависимости от целей применения вертолета (военного или гражданского).
СОЗП содержит аппаратно-программный комплекс, предназначенный для формирования улучшенной инструментальной полетной видимости закабинного пространства и препятствий на нем для любых метеоусловий и любых видов покрытий подстилающей поверхности, а именно вычислитель 8 комплексирования видеоизображений закабинного пространства, полученных от различных первичных источников формирователей изображения закабинного пространства, и программный комплекс формирования синтезированной видимости закабинного пространства (база данных EGPWS).
МРК 9 СНС - нестандартный интегрированный многоканальный многорежимный приемник-корректор ГЛОНАСС/GPS, предназначенный для высокоточного автоматического определения географических координат текущего местоположения вертолета, путевой скорости, курса, угла сноса, крена, тангажа. МРК 9 СНС решает задачи определения параметров пространственного положения вертолета, навигационные задачи вывода вертолета в заданную точку воздушного пространства с географическими координатами λ, φ. Он также обладает возможностью изменения маршрута полета и содержит собственную электронную базу данных рельефа подстилающей поверхности. Дополнительно МРК 9 СНС содержит антенный пост, состоящий из трех/четырех приемных антенн с базовыми расстояниями между ними не менее 0,7 м, которые располагаются на поверхности фюзеляжа вертолета и позволяют с высокой точностью определять параметры пространственного положения вертолета.
МПВС 10 - многоканальный панорамный приемник воздушных сигналов, предназначенный для формирования информации о полном давлении набегающего воздушного потока, образованного от движения вертолета в воздушном пространстве, и индуктивного потока, образованного от работающего НВ, а также формирования информации о статическом давлении и температуре заторможенного потока воздуха. Он представляет собой геометрическое тело вращения, воспринимающее полное давление набегающего воздушного потока по шести каналам приема полного давления Рпол1-Рпол6 и по пяти каналам приема полного давления индуктивного потока Рil-Pi5, образованного от работающего НВ при любых эволюциях вертолета, при любом положении ручек управления циклическим шагом и общим шагом НВ и имеет камеру полного торможения воздушного потока, в которой находятся датчики статического давления и температуры заторможенного воздуха. Использование камеры торможения для формирования информации о статическом давлении воздушного потока и температуры окружающей среды описано, например, в патенте РФ №2426133, G01P 5/16, опубл. 10.08.2011. Однако дополнительно многоканальный панорамный приемник воздушных сигналов имеет каналы приема полного давления индуктивного потока.
БВС и МП 11 - блок определения высотно-скоростных и метеорологических параметров вертолета. Он содержит в своем составе блок датчиков полного давления воздушного потока, набегающего на вертолет, блок датчиков полного давления индуктивного потока, образованного от работающего НВ. При этом датчики полного давления соединены с МПВС 10 пневмопроводами. Дополнительно БВС и МП 11 воспринимает электрические сигналы датчиков статического давления и температуры заторможенного потока, находящихся в камере торможения воздушного потока МПВС 10. БВС и МП 11 в своем составе содержит также цифровой вычислитель и элементы сервисной электроники: (источники вторичного питания, аппаратные сглаживающие фильтры, модули связи и сопряжения). БВС и МП 11 по цифровым линиям связи соединен с системной шиной 16 ИКБО вертолета.
БПП и ДД 12 - блок определения параметров пространственного положения вертолета и параметров динамики его движения, предназначенный для определения углов крена, тангажа и курса вертолета, путевой скорости и ее продольных и поперечных составляющих, географических координат текущего местоположения вертолета, угловой скорости рыскания, углов наклона ВВПП до запуска силовых установок, на этапах взлета, посадки.
БПП и ДД 12 в своем составе содержит:
ДУН - датчики определения углов наклона ВВПП - трехосевые акселерометры (например, ADIS 16209 фирмы Analog Device), устанавливаемые в базовой системе координат вертолета, образованной связанными осями вертолета X, Y, Z при установке вертолета в нормальных климатических условиях на специально отгоризонтированной площадке и предназначенные для измерения вектора ускорения силы тяжести Земли и ее составляющих 
НИМ - инерциальный измерительный модуль, например, ADIS 16488 фирмы Analog Device, содержащий в своем составе:
- блок из трехосевых микромеханических акселерометров, предназначенных для определения параметров вектора кажущегося ускорения и его составляющих на связанные оси вертолета 
- блок из трехосевых микромеханических гироскопов, предназначенных для определения параметров вектора абсолютной угловой скорости вертолета 
ВМ - векторный магнитометр, предназначенный для определения текущего магнитного курса вертолета ψм и содержащий в своем составе трехосевые измерители суммарного вектора напряженности магнитного поля Земли и магнитного поля вертолета и его составляющих на связанные оси вертолета 
Кроме того, ИИМ содержит стандартные датчики температуры окружающей среды, предназначенные для измерения температуры датчиков ускорения, угловой скорости и напряженности магнитного поля Земли, показания которых используются для алгоритмической компенсации инструментальных погрешностей датчиков первичной информации. ИИМ дополнительно содержит датчики измерения угловых ускорений, предназначенные для включения/отключения интеграторов микромеханических датчиков угловых скоростей (микромеханических гироскопов - ММГ) с целью минимизации временного дрейфа угловых координат пространственного положения вертолета. С целью минимизации дрейфа нуля во времени и от запуска к запуску датчики линейных ускорений, ММГ, датчики угловых ускорений устанавливаются на гранях шестигранной пирамиды.
БПП и ДД 12 содержит также вычислитель и элементы сервисной электроники (источники вторичного питания, аппаратные сглаживающие фильтры, модули связи и сопряжения, многоканальные аналоговые цифровые преобразователи и др.).
Вычислитель БПП и ДД 12 содержит:
- модули алгоритмической коррекции инструментальных погрешностей датчиков первичной информации (ДПИ), цифровые фильтры компенсации вибрационных ускорений связанных осей вертолета, инерциально-спутниковый фильтр, которые реализованы программно-алгоритмическими средствами. Они предназначены для повышения точности и надежности определения параметров путевой скорости, параметров ветра, параметров пространственного положения вертолета - углов крена и тангажа, - необходимых экипажу для безопасного приземления вертолета в условиях отсутствия визуальной видимости земной поверхности.
БПП и ДД 12 по цифровым линиям связи соединен с системной шиной 16 ИКБО вертолета.
Вычислитель БПП и ДД 12 дополнительно содержит топографическую базу данных подстилающей поверхности, например цифровую картографическую информацию с наложенной на нее всемирной аэронавигационной базой данных фирмы Garmin - Garmin Flight Charts или высокоточную улучшенную базу данных цифрового рельефа местности - ландшафта Земли EGPWS фирмы Honeywell.
БПУ 13 - блок определения параметров положения органов управления и координации их перемещения предназначен для выработки информации по параметрам управления вертолетом и динамики движения органов управления. БПУ 13 содержит датчики параметров положения органов управления: датчики углов установки лопастей НВ - φНВ (датчики общего шага НВ), датчики углов установки лопастей РВ - φРВ (датчики хода штока хвостового редуктора РВ), датчики частоты вращения НВ - nНВ и турбокомпрессоров силовых установок - nTK и датчики отклонения ручки управления циклическим шагом НВ  ;
;  (датчики отклонения тарелки автомата перекоса в продольном и поперечном направлениях). БПУ 13 содержит также вычислитель и элементы сервисной электроники (источники вторичного питания, аппаратные сглаживающие фильтры, многоканальные аналогово-цифровые преобразователи).
(датчики отклонения тарелки автомата перекоса в продольном и поперечном направлениях). БПУ 13 содержит также вычислитель и элементы сервисной электроники (источники вторичного питания, аппаратные сглаживающие фильтры, многоканальные аналогово-цифровые преобразователи).
БПУ 13 по цифровым линиям связи соединен с системной шиной 16 ИКБО вертолета.
Индикаторы СВП по цифровым линиям связи взаимодействуют с бортовой системой аварийной сигнализации вертолета - БСАС 14.
БСАС 14 - бортовая система аварийно-предупреждающей сигнализации вертолета содержит в своем составе источники визуальной сигнализации (световые, текстовые сообщения, визуальные сигналы сильного привлекающего действия - ВССПД, реализованные в виде центральных сигнальных огней красного и желтого цвета), звуковой сигнализации (речевой информации, звуковой тональной информации, звуковых сигналов сильного привлекающего действия - ЗССПД), тактильные сигнализаторы - ТС (в виде источников вибротактильных перегрузок, установленных на ручке «ШАГ-ГA3).
В вычислителях блоков БВС и МП 11, БП и ДД 12, БПУ 13 реализован алгоритм уведомляющей, предупреждающей и аварийной сигнальной информации. Алгоритм срабатывания сигнализации по каждому критическому параметру реализуется со статическим и динамическим упреждением, уменьшающим вероятность ошибочных действий экипажа и обеспечивающим вывод вертолета из опасной зоны полетной ситуации заблаговременно.
Системная шина 16 ИКБО - мультиплексный канал информационного обмена между блоками СВП и ее индикаторами, а также между электронными устройствами ИКБО вертолета (например, шина ARINC 429, ARINC- 664 - система AFDX). Он предназначен для высокоскоростного информационного обмена в реальном режиме времени.
Блоки СВП работают следующим образом.
Работа МПВС. С помощью МПВС 10 в зависимости от вида перемещения вертолета (вперед-назад, влево-вправо или его вращения относительно связанных осей по крену, тангажу, рысканию) формируют величины полного давления набегающего воздушного потока по шести каналам Рпол1-Рпол6 и полного давления индуктивного потока, образованного от работающего НВ по пяти каналам Рi1-Pi5cм и передают эти данные по пневмопроводам на БВС и МП 11. МПВС 10 передает в БВС и МП 11 показания датчиков статического давления окружающей среды Рст и датчика температуры заторможенного потока воздуха Т*, размещенных в камере полного торможения воздушного потока.
Работа блока БВС и МП 11. БВС и МП 11, используя показания датчиков полного давления воздушного потока, набегающего на вертолет, полного давления индуктивного потока, образованного НВ, статического давления, температуры наружного воздуха, полученного с помощью датчика температуры заторможенного потока воздуха, вычисляют по известным гипсометрическим формулам высотно-скоростные параметры вертолета. Продольные и поперечные составляющие скорости воздушного потока ±VX; ±VZ определяются с учетом вращательного движения вертолета относительно связанных осей X, Y, Z с помощью датчиков угловой скорости, размещенных в блоке БПП и ДД 12 ωх, ωу, ωZ, и полученной информации об этих данных по цифровым линиям связи от блока БПП и ДД 12. Далее данные ±VX; ±VZ, полученные в связанной системе координат вертолета, перепроектируются в нормальную земную систему координат, используя текущие параметры пространственного положения вертолета: углы крена γ, тангажа ϑ и курса ψ, которые непрерывно поступают в блок БВС и МП 11 по цифровым линиям связи от блока БПП и ДД 12. В данном случае координатное преобразование осуществляется по известным формулам преобразования проекций вектора в матричном виде. Далее по вычисленным данным продольной и поперечной составляющих путевой скорости ±WX; ±WZ, полученных путем преобразования данных северной и восточной составляющих путевой скорости WN; WE, вырабатываемых в автономном режиме работы блоком БПП и ДД 12 или при комплексированном режиме работы блока БПП и ДД 12 с МРК 9 СНС, с высокой точностью и при известном текущем курсе, вырабатываемым блоком БПП и ДД 12, вычисляют продольную и поперечную составляющие скорости ветра ±ux; ±uz как разность между данными продольных и поперечных составляющих воздушной скорости ±VX; ±VZ и продольной и поперечной составляющих путевой скорости ±WX; ±WZ.
На этапах набора высоты горизонтального полета и снижения, когда известны данные истинной воздушной скорости, курса и путевой скорости, метеорологическое направление ветра δ или навигационное направление ветра НВ и его сила U определяются путем решения известного навигационного треугольника скоростей. При этом в вычислитель БВС и МП 11 непрерывно вводится информация о величине угла сноса, полученная по системной шине 16 от бортового метеорологического локатора и/или радиотехнических средств воздушной навигации, например многорежимного корректора СНС - МРК 9 СНС.
Продольная и поперечная составляющие скорости ветра вычисляются по известному курсу ψ, полученному от векторного магнитометра (ВМ), расположенного в блоке БПП и ДД 12 СВП. ВМ в качестве источника первичной информации использует вектор напряженности магнитного поля Земли НМПЗ и вектор напряженности магнитного поля вертолета НВ. БПП и ДД 12 определяет величину текущего магнитного курса после компенсации магнитной девиации по известным алгоритмам. Кроме того, вычислитель БВС и МП 11 по известным значениям δ, U, Ратм, ТНВ и алгоритму, изложенному в РЛЭ, конкретного типа вертолета рассчитывает величины максимально допустимых взлетных и посадочных масс 
- температура окружающей среды закабинного пространства;
- атмосферное давление на уровне ВВПП или высоте полета;
- приборная скорость полета;
- истинная скорость полета;
- вертикальная скорость;
- максимально допустимые взлетная/посадочная массы;
- скорость и направление ветра;
- продольная и поперечные составляющие скорости ветра.
Работа блока БПП и ДД 12
Работа БПП и ДД 12 основана на том, что угловые координаты вертолета γ, ϑ вычисляют двумя принципиально различными способами в зависимости от фактических условий полета:
- режим установившегося горизонтального прямолинейного полета, когда величины ωх, ωу, ωz равны или близки к нулю;
- режим маневрирования вертолета в воздушном пространстве с угловыми скоростями |ωх, ωу, ωz|>0;
- режим стоянки вертолета на наклонной подстилающей поверхности, приземления и отрыв вертолета.
В режиме установившегося горизонтального полета при отсутствии сигналов с датчиков угловых скоростей связанных осей вертолета ωх, ωу, ωz углы крена и тангажа определяются с помощью сигналов микромеханических акселерометров, установленных в связанных осях вертолета, пропорциональных действующей величине проекции ускорения силы тяжести gx; gz. Величина этой проекции зависит от положения корпуса измерителя, установленного в центре масс вертолета жестко относительно связанных осей вертолета, и определяется углами крена и тангажа - продольными и поперечными углами наклона корпуса измерителя к плоскости горизонта.
В режиме маневрирования вертолета в воздушном пространстве с угловыми скоростями |ωх, ωу, ωz|>0 вычислитель БПП и ДД 12, используя показания датчиков угловых скоростей связанных осей вертолета ωх, ωу, ωz и кватернионное интегрирование, вырабатывает информацию о пространственном положении вертолета, углах крена, тангажа и курсе.
На этапах стоянки вертолета в моменты отрыва и приземления углы γ, ϑ, продольные и поперечные углы наклона ВВПП γВВПП, ϑВВПП вычисляются с помощью показаний акселерометров - датчиков углов наклона, установленных в центре масс вертолета в базовой системе координат, полученной путем установки вертолета в нормальных климатических условиях на специально отгоризонтированной площадке. Выходной информацией БПП и ДД 12 являются восточная WE и северная WN составляющие путевой скорости, полученные путем интегрирования линейных ускорений связанных осей вертолета ОХ и OZ, полученных путем перепроектирования показаний акселерометров, установленных в связанной системе координат, в нормальную земную систему координат, используя текущие углы крена, тангажа и курса.
Далее по известной величине курса ψ, вычисленной по измерениям вектора магнитной индукции, полученной от ВМ, размещенного в блоке ИИМ БПП и ДД 12 или в другом месте вертолета, наименее подверженном влиянию магнитного поля вертолета, вычисляют продольные и поперечные составляющие путевой скорости ±WX; ±WZ, которые комплексируются с продольной и поперечной составляющими путевой скорости 

Определение координат текущего местоположения λ, φ вертолета осуществляется как в автономном режиме работы блока БПП и ДД 12, так и в комплексированном режиме работы от МРК 9 СНС по известным алгоритмам работы бесплатформенных инерциальных навигационных систем. Причем в связи с особенностями применения МРК 9 СНС, предназначенного не только для определения текущей путевой скорости и текущего путевого угла, но и для высокоточного определения координат углового положения вертолета γ, ϑ, ψ, за счет использования антенного поста, состоящего из трех или четырех приемных антенн СНС, разнесенных вдоль фюзеляжа в продольном и поперечным направлениях, в вычислителе БПП и ДД 12 реализуется алгоритм работы инерциально-спутникового фильтра, основанного на разности величин:
ΔW=Wa-Wc;
Δγ=γа-γс;
Δϑ=ϑа-ϑс;
Δφ=φа-φс;
Δλ=λa-λc.
Реализация подобного алгоритма позволяет определять с высокой точностью быстроменяющиеся параметры пространственного положения вертолета γ, ϑ, ψ и медленноменяющиеся навигационные параметры W, ПУ, λ, φ.
При аппаратной реализации блока БПП и ДД 12 с использованием датчиков первичной информации угловых скоростей и линейных ускорений, выполненных по МЭМС-технологиям, с целью минимизации параметров нестабильности (временные дрейфы нулей в запуске и от запуска к запуску), датчики первичной информации размещаются на гранях шестиугольной усеченной пирамиды. Для этого также используются высокоточные датчики угловых ускорений, предназначенные для включения/отключения интеграторов показаний микромеханических датчиков угловых скоростей (ММГ) в зависимости от режимов полета вертолета (например, в установившемся горизонтальном полете интеграторы отключены).
Вычислитель БПП и ДД 12 также формирует аварийно-предупреждающую сигнальную информацию по параметрам пространственного положения вертолета на всех этапах и режимах полета в соответствии с данными, приведенными в таблице 1.
Таким образом, выходной информацией блока БПП и ДД 12 являются параметрическая и сигнальная информация по параметрам пространственного положения вертолета, динамике его движения, а также навигационные параметры:
±WX; ±WZ продольная и поперечная составляющие путевой скорости вертолета на малых и предельно малых высотах;
- ψм - текущий магнитный курс вертолета;
- γВВПП, ϑВВПП - поперечный и продольный углы наклона ВВПП;
- ωу - угловая скорость рыскания;
- γ, ϑ, - текущие углы крена и тангажа на всех этапах и режимах полета;
- WN; WE; W; ПУ; γ; φ - северная и восточная составляющие путевой скорости, путевая скорость, путевой угол, текущие координаты местоположения вертолета;
- EGPWS - улучшенное синтетическое отображение рельефа подстилающей поверхности в 3D-проекции, полученное из базы данных и хранящееся в вычислителе БПП и ДД 12;
- HTAWS - система предупреждения экипажа (визуальная и звуковая) об опасном сближении вертолета с земной поверхностью и препятствиями на ней, снижении до МБВ, содержащую базу данных EGPWS, базу данных аэродромов и вертодромов, базу данных минимальных безопасных высот в зависимости от рельефа местности, блок заданий ширины трассы полета, и получающую информацию о вертикальной скорости снижения от БВС и МП 11.
Работа БПУ 13
БПУ 13 использует показания датчиков:
φНВ - текущего положения угла установки лопастей НВ (текущего положения рычага «ШАГ-ГАЗ»);
- φРВ - текущего положения угла установки лопастей РВ;
- 
-nНВ - текущей частоты вращения НВ;
- nТК - текущей частоты вращения ротора турбокомпрессора
Многоканальный аналогово-цифровой преобразователь БПУ 13 преобразует аналоговые сигналы этих датчиков в цифровые. При этом вычислитель БПУ 13 проводит операции по алгоритмической коррекции инструментальных погрешностей датчиков. Дифференцируя изменяющиеся во времени текущие значения параметров при перемещении органов управления, БПУ 13 вырабатывает информацию о темпе перемещения ручки «ШАГ-ГАЗ» - 

Вычислитель БПУ 13, сравнивая текущие значения 

Работа БСАС 14
В зависимости от алгоритмов работы аварийно-предупреждающей сигнальной информации, реализованной в блоках системы СВП: БВС и МП 11, БПП и ДД 12, БПУ 13, которые выполнены со статическим и динамическим упреждением срабатывания сигнализации и которые отображаются на КПИ 1 и на комбинере 2 ИЛС, одновременно могут работать и средства звуковой, и вибротактильной сигнализации. С целью повышения эффективности работы каналов уведомляющей, предупреждающей и аварийной сигнальной информации используются средства резервирования сигнализации, работающие на различных физических принципах (а именно когнитивные средства визуальной сигнализации, средства звуковой тональной сигнализации и речевой сигнализации, средства вибротактильной сигнализации), реализованные в бортовой аварийной системе сигнализации вертолета - БСАС 14. При возникновении аварийной ситуации на борту срабатывают звуковые сигнализаторы сильного привлекающего действия - сирена и визуальные сигнализаторы сильного привлекающего действия - центральные сигнальные огни желтого и красного цвета.
Применение вибротактильного сигнализатора, смонтированного на ручке «ШАГ-ГАЗ», значительно разгружает зрительный анализатор пилота вертолета, освобождая его от необходимости непрерывного отслеживания показаний приборов, контролирующих работу системы управления вертолетом, способствуя более тщательному контролю за другими параметрами, необходимыми в текущий момент времени. С целью повышения эффективности работы системы аварийно-предупреждающей сигнальной информации в СВП организована совместная работа БСАС 14 вертолета и системы аварийной сигнализации, вырабатываемой блоками СВП: БВС и МП И, БПП и ДД 12, БПУ 13.
Например, при возникновении аварийной ситуации из-за превышения предельно-допустимых в эксплуатации значений (углов крена и тангажа, продольных и поперечных углов ВВПП, продольных и поперечных составляющих скорости ветра) срабатывают как визуальные, так и звуковые сигнализаторы. При превышении темпа перемещения рычага «ШАГ-ГАЗ» или его отклонения на величину более 11 градусов (например, для вертолетов типа Ми-8) срабатывает вибротактильный сигнализатор, установленный на ручке «ШАГ-ГАЗ». Для обеспечения безопасности полетов в быстроменяющейся аэродинамической обстановке на малых высотах в условиях потери экипажем визуального контакта с земными ориентирами каждый градус перемещения ручки «ШАГ-ГАЗ» сопровождается тональным звуковым сигналом типа «колокольчик». ВССПД срабатывает при отказах жизненно важных для безопасного пилотирования вертолета блоков и систем, например отказов блоков БВС и МП 11, БПП и ДД 12, БПУ 13, а также когда параметры пространственного положения достигают критических значений.
Работа КПИ 1
КПИ 1 из системной шины 16 ИКБО получает всю информацию, вырабатываемую блоками БВС и МП 11, БПП и ДД 12, БПУ 13 в цифровом закодированном виде, например, в соответствии со стандартами ARJNC. Модуль формирования видеоизображения КПИ 1 генерирует символьную и текстовую информацию, которая представляется экипажу на КПИ 1. Параметрическая и сигнальная информация, вырабатываемая блоками БВС и МП 11, БПП и ДД 12, БПУ 13, МРК 9 СНС отображается на КПИ 1 с использованием принципов когнитивной графики.
Под «когнитивностью» понимается способность к умственному восприятию и переработке внешней информации. В предлагаемом техническом решении используются принципы когнитивной графики при визуализации отображения параметрической и сигнальной информации. Использованы методы образного представления решаемых задач, которые позволяют экипажу сразу увидеть решение либо получить подсказку для безошибочного решения. Это исключает необходимость обращения членов экипажа к долговременной памяти, а также выполнения вычислений в уме и концентрации внимания на отдельных указателях и сигнализаторах. Повышается скорость переключения внимания, уменьшаются время принятия решений на управляющее воздействие и психофизиологическая нагрузка на членов экипажей, а также снижается вероятность ошибочных действий. Уровень безопасности полетов повышается за счет отображения параметрической информации, имеющей верхние/нижние пределы измерений в полном диапазоне отображаемой информации без применения круглых шкально-стрелочных индикаторов, которые заменены на цифровые счетчики-сигнализаторы (ЦСС). При этом в зависимости от величины текущего значения контролируемого параметра изменяется цвет фона цифрового счетчика-сигнализатора, подвижных и неподвижных индексов сигнализаторов, текстовых сообщений во всплывающих окнах, всплывающих маркеров и индексов. Сигнальная информация отображается следующим образом:
- на зеленом фоне ЦСС, когда контролируемые параметры, вырабатываемые блоками СВП, находятся в рекомендуемом эксплуатационном диапазоне;
- на желтом фоне, когда контролируемые параметры приближаются к допустимым в эксплуатации значениям по верхнему или нижнему пределу;
- на красном проблесковом фоне, когда контролируемые параметры достигают максимального/минимального допустимого значения в эксплуатации.
При этом изменение цвета фона ЦСС происходит со статическим и динамическим упреждением, чтобы экипаж своевременно мог осуществить управляющее воздействие по предупреждению выхода вертолета на критические/закритические режимы полета.
Работа комбинера 2 ИЛС
На комбинер 2 ИЛС выводится информация от систем EFVS/CVS в зависимости от этапов и режимов полета вертолета. Известно, что EFVS - аппаратно-программный комплекс, предназначенный для повышения ситуационной информированности экипажа за счет формирования улучшенного изображения внешней среды - закабинного пространства, подстилающей поверхности и препятствий на ней. Система CVS - система комбинированного видения, полученная наложением вида EFVS на SVS в соответствии с Квалификационными требованиями КТ-315 «Минимальные стандарты характеристик авиационных систем (MASPS) для систем технического зрения с расширенными возможностями визуализации, систем искусственного зрения, комбинированных систем искусственного зрения и бортовых систем технического зрения с расширенными возможностями визуализации» (_doc/files/kt-315.pdf).
Однако в заявляемой СВП повышение уровня безопасности полетов вертолетов осуществляется благодаря использованию комбинации EFVS и CVS в зависимости от этапов полета вертолета. В заявленном устройстве это:
- комбинация EFVS/CVS - улучшенного отображения закабинного пространства (подстилающей поверхности и препятствий на ней) в реальном режиме времени, на которую накладывается символьное отображение параметрической и сигнальной информации, необходимой для безопасного пилотирования вертолета на этапах взлета и посадки в условиях потери экипажем визуальных ориентиров в снежном/пыльном вихре или СМУ и ниже высоты принятия решения;
- символьное отображение параметрической и сигнальной информации, необходимой для безопасного пилотирования вертолета на всех остальных этапах и режимах полета;
- отображение предупреждающей сигнальной информации об опасных расстояниях до препятствий (подвижных и неподвижных препятствий, в т.ч. опор ЛЭП и проводов) в зависимости от 1 до 3 диаметров НВ, выполненное с упреждением в ½ диаметра НВ, которая дублируется звуковой сигнализацией БСАС 14 в режиме работы EFVS+CVS.
При этом в отличие от требований КТ-315 (см. выше), которые являются стандартными по отношению к самолетам, на комбинере 2 ИЛС вертолета дополнительно отображаются вертолетные параметры:
- продольная скорость перемещения вертолета ±WX;
- поперечная скорость перемещения вертолета ±WZ;
- угловая скорость рыскания ±ωу;
- вертикальная скорость Vy;
- продольная скорость ветра ±uх;
- поперечная скорость ветра ±uz;
- текущая истинная высота полета Нист;
- воздушная скорость полета Vu;
- углы крена γ и тангажа ϑ;
- продольные и поперечные углы наклона вертолетных взлетных/посадочных площадок: ϑВВПП; γВВПП;
- параметры органов управления;
- визуальная аварийно-предупреждающая сигнальная информация по вышеперечисленным параметрам.
Работа НИ 3
НИ 3 получает всю информацию, необходимую для безопасного пилотирования вертолета в воздушном пространстве, в закодированном виде через системную шину 16 от блоков БВС и МП 11, БПП и ДД 12 МРК 9 СНС. Модуль формирования видеоизображения НИ 3 представляет экипажу визуальное отображение текущих навигационных параметров, запланированную траекторию полета, фактическую траекторию полета, аэронавигационную информацию, цифровую картографическую информацию в 3D-формате, метеорологическую информацию. НИ 3 обеспечивает экипаж вертолета четким и высококачественным интуитивно-понятным отображением внешней среды закабинного пространства и препятствий на ней независимо от времени года, суток и фактических метеорологических условий. Формат визуального отображения параметрической и сигнальной информации, необходимой экипажу для решения навигационных задач, реализован с использованием многооконных режимов отображения информации, например формат планирования полета, формат отображения текущего навигационного состояния и оценки точности навигационных режимов полета (RNP), формат отображения схем выхода (SID), подхода (APPROACH), захода на посадку (Istrument Approach Chart), руления и стоянок, метеорологической информации, аэронавигационной информации (AIP), предупреждений (NOTAM), также формат отображения улучшенной синтезированной видимости закабинного пространства в виде: EGPWS/CVS, EGPWS/HTAWS, маркера траектории полета (символ самолета). Представление экипажу вертолета навигационной информации организовано следующим образом: от блоков БВС и ПМ 11, БПП и ДД 12, МРК 9 СНС формируется улучшенное синтетическое отображение подстилающей поверхности в зависимости от координат текущего местоположения вертолета λ; φ и его пространственного положения γ; ϑ; ψ, например, так, как это организовано в EGPWS-системе Honeywell.Corp.(http://www.EGPWS.com) или в улучшенном пилотажном дисплее EFD-1000 компании Aspen Avionics, Inc. (http://www/aspenavionics.com). Формат отображения навигационных параметров при этом может быть реализован и следующим образом: на нижнем слое дисплея отображается база данных местности компании Jeppesen, которая выполнена с высоким разрешением рельефа местности в 3D-формате со встроенной системой предупреждения о возможном столкновении с рельефом местности и неподвижными препятствиями на ней. База данных Jeppesen дает четкое изображение наземных и водных объектов, аэропортов, препятствий в 3D-формате и с февраля 2012 г. доступна для всех пользователей.
В предлагаемой СВП на синтезированную систему видения закабинного пространства накладываются аэронавигационная информация (например, компании Jeppesen), сигнальная информация системы предупреждения столкновения вертолета с земной поверхностью и препятствиями на ней (например, системы предупреждения столкновения вертолета с препятствиями компании Garmin: HTAWS-Garmin), маркер траектории полета, показывающий вертикальное и горизонтальное местоположение вертолета.
Подобная визуализация навигационных параметров резко повышает ситуационную осведомленность экипажа о своем местоположении в воздушном пространстве, уменьшает психофизиологическую нагрузку на пилота, не требует дорогостоящих аппаратных средств и предназначена для пилотирования вертолета в простых и сложных метеоусловиях. Большим преимуществом является совместное представление параметров динамики движения вертолета и навигационных параметров на индикаторах, расположенных рядом в общем корпусе с одним пультом управления, что значительно снижает психофизиологическую нагрузку на экипаж, уменьшает время принятия решения за счет резкого уменьшения зон неопределенностей и исключает необходимость обращения к долговременной памяти и выполнения умственных операций при одновременном пилотировании вертолета в быстроменяющейся аэродинамической обстановке.
Работа средств отображения закабинного пространства (СОЗП) в реальном режиме времени
СОЗП, предназначенные для формирования улучшенного изображения закабинного пространства подстилающей поверхности и препятствий на ней в реальном режиме времени, работают следующим образом. Видеоизображения подстилающей поверхности, полученные с ТВ-приемника 4, ММ радара 5, ИК радара 6 и/или лазерного радара 7, поступают в вычислитель 8 формирования улучшенного отображения закабинного пространства подстилающей поверхности и препятствий на ней, в котором происходят комплексная обработка этих видеоизображений посредством программно-аппаратного обеспечения и формирование улучшенного полетного визуального отображения закабинного пространства подстилающей поверхности. При этом качество визуализации закабинного пространства не зависит от времени года, суток, фактических метеорологических условий, а также технических характеристик и вида подстилающей поверхности. Улучшенное отображение закабинного пространства формируется на комбинере 2 ИЛС на этапах взлета/посадки и при снижении с высоты ниже ВПР, а также может отображаться на КПИ 1 при достаточных его геометрических размерах (с диагональю не менее 10''). Дополнительно при маневрировании вертолета на малых и предельно малых высотах могут отображаться опоры ЛЭП и провода.
Взаимодействие СВП с бортовыми радиотехническими системами связи и навигации
Для повышения уровня безопасности полетов на всех этапах и режимов полета СВП взаимодействует с радиотехническими средствами воздушной навигации и радиовысотомером малых высот РВ и РТС 15. Использование информации об истинной высоте полета, вырабатываемой стандартным радиовысотомером малых высот, позволяет блокам БПП и ДД 12 и БВС и МП 11 выработать аварийно-предупреждающую сигнальную информацию по предотвращению попадания вертолета в режим «вихревое кольцо» и его опрокидывания по причине превышения углов крена и тангажа установленных ограничений в моменты приземления и отрыва в условиях потери экипажем визуальной видимости земных ориентиров из-за образования снежного/пыльного вихря. Система выдает экипажу информацию о безопасной вертикальной скорости снижения вертолета, которая необходима ему для предотвращения попадания в режим «вихревое кольцо», а также сигнальную информацию по углам крена и тангажа на предельно малых высотах.
Дополнительно на КПИ 1 (в случае применения индикатора с диагональю более 10'') от систем РТС навигации 15 выводится жизненно важная навигационная информация (см. ниже Фиг.2).
Работа интегрированного многоканального приемника-корректора СНС ГЛОНАСС/GPS МРК 9СНС
В вычислителе МРК 9 СНС кроме традиционного алгоритма определения местоположения подвижного объекта дополнительно реализован алгоритм определения параметров пространственного положения вертолета: углов крена, тангажа и курса, а также текущего угла сноса за счет использования антенного поста. Дополнительно МРК 9 СНС обеспечивает экипаж вертолета радиотелефонной связью, используя спутники системы связи (например, ССС GLOBALSTAR), а также электронной почтой и доступом в ИНТЕРНЕТ.
Приемное устройство МРК 9 СНС спутниковой навигационной системы ГЛОНАСС/GPS работает в соответствии с алгоритмом контрольного интерфейсного документа спутниковой навигационной системы. Информация о путевой скорости W и ее составляющих (восточной WE, северной WN; а также о путевом угле (ПУ), углах крена, тангажа, курса, угле сноса) поступает в системную шину 16 ИКБО вертолета и используется для формирования высокоточных продольной и поперечной составляющих путевой скорости, продольной и поперечной составляющих скорости ветра, необходимых экипажу для безопасного приземления вертолета в условиях потери экипажем визуальной видимости земных ориентиров.
В связи с особенностями динамики движения вертолета и управления им, а также неблагоприятным влиянием внешних воздействующих факторов (разделы 1, 2, 3 таблицы 1) возникает необходимость представления экипажу на КПИ 1 полного набора этих параметров и аварийно-предупреждающей сигнальной информации по ним.
Выше были приведены технические средства и алгоритмы для получения этих параметров. Далее будет описан формат представления этих параметров на КПИ 1.
Формат визуализации параметрической и сигнальной информации, вырабатываемой блоками БВС и МП 11, БПП и ДД 12, БПУ 13 на КПИ 1 показан на Фиг.2, на котором он условно разделен на восемь частей:
1 - левая нижняя часть предназначена для отображения информации о работоспособности и настройках (частоты, диапазоны) используемых радиотехнических средств навигации (при этом наименование радиотехнических средств отображается белым, желтым, красным цветами в соответствии с их работоспособностью, а именно: белый - работоспособно, желтый - частично работоспособно, красный - неработоспособно);
2 - левая верхняя часть предназначена для отображения параметрической и сигнальной информации о динамике движения органов управления;
3 - верхняя часть предназначена для визуального отображения информации по работоспособности и отказах информационных блоков, входящих в структуру СВП;
4 - центральная часть индикатора предназначена для отображения параметрической и сигнальной информации о параметрах пространственного положения вертолета и динамике его движения;
5 - правая верхняя часть предназначена для отображения параметрической и сигнальной информации о высотных параметрах вертолета;
6 - нижняя правая часть предназначена для отображения параметрической и сигнальной информации о метеорологических условиях полета;
7 - нижняя центральная часть предназначена для отображения жизненно важных навигационных параметров полета, необходимых для безопасного его завершения при отказе основной навигационной системы;
8 - левая центральная часть предназначена для отображения параметрической и сигнальной информации о скоростных параметрах вертолета.
Формат визуализации информации о текущем положении органов управления вертолетом, динамике их перемещения (Фиг.2 - поз.2.2), а также его описание показаны на Фиг.3 и таблице 2.
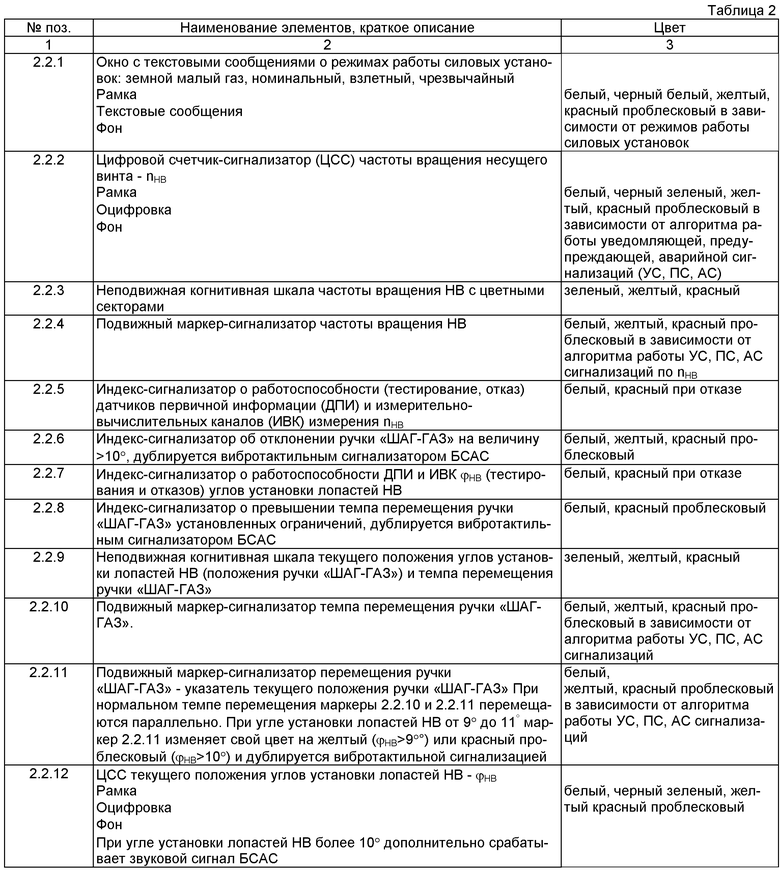
Формат визуального отображения информации о работоспособности и отказах измерительно-вычислительных комплексов, входящих в структуру СВП, показан на Фиг.2 позицией 2.3. Он не требует пояснений: текстовые сообщения об отказах систем СВП отображаются красным цветом, рабочее состояние - зеленым. Дополнительно выведена аварийная сигнализация о наиболее опасных режимах работы СВП (темп НВ, темп РВ, вертикальная скорость, угловая скорость, скорость смещения).
Формат визуального представления параметрической и сигнальной информации о пространственном положении вертолета, динамики его движения (Фиг.2 поз.2.4) и его описание показаны на Фиг.4 и таблице 3.
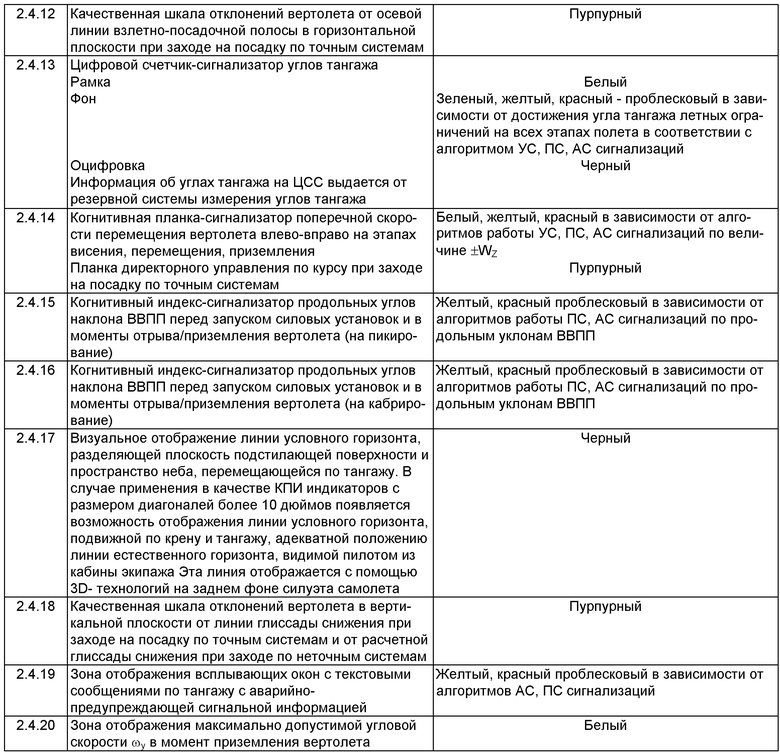
Формат визуального отображения параметрической и сигнальной информации о высотных параметрах вертолета и вертикальной скорости (Фиг.2 - поз.2.5) и его описание показаны на Фиг.5 и таблице 4.
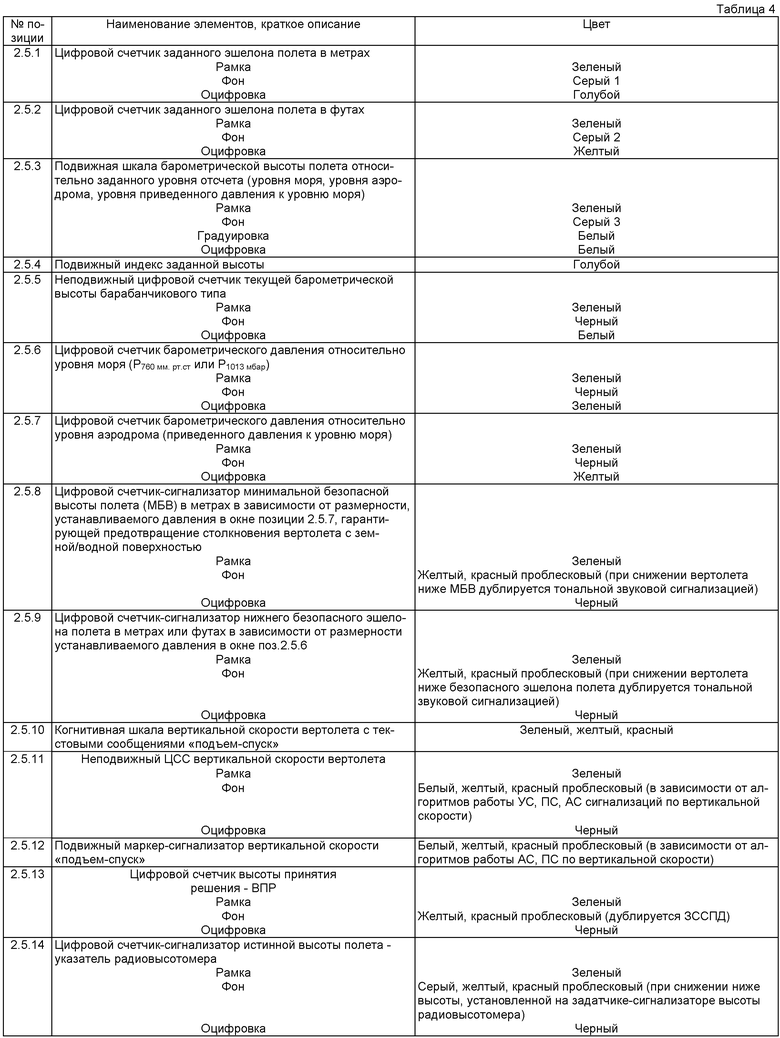
Формат визуального представления параметрической и сигнальной информации о метеорологических условиях полета и максимально допустимых взлетных и посадочных массах вертолета в зависимости от фактических метеорологических условий, способов взлета/посадки, использования ПОС, ПЗУ и правил полетов (Фиг.2 - поз.2.6) и его описание показаны на Фиг.6 и таблице 5.
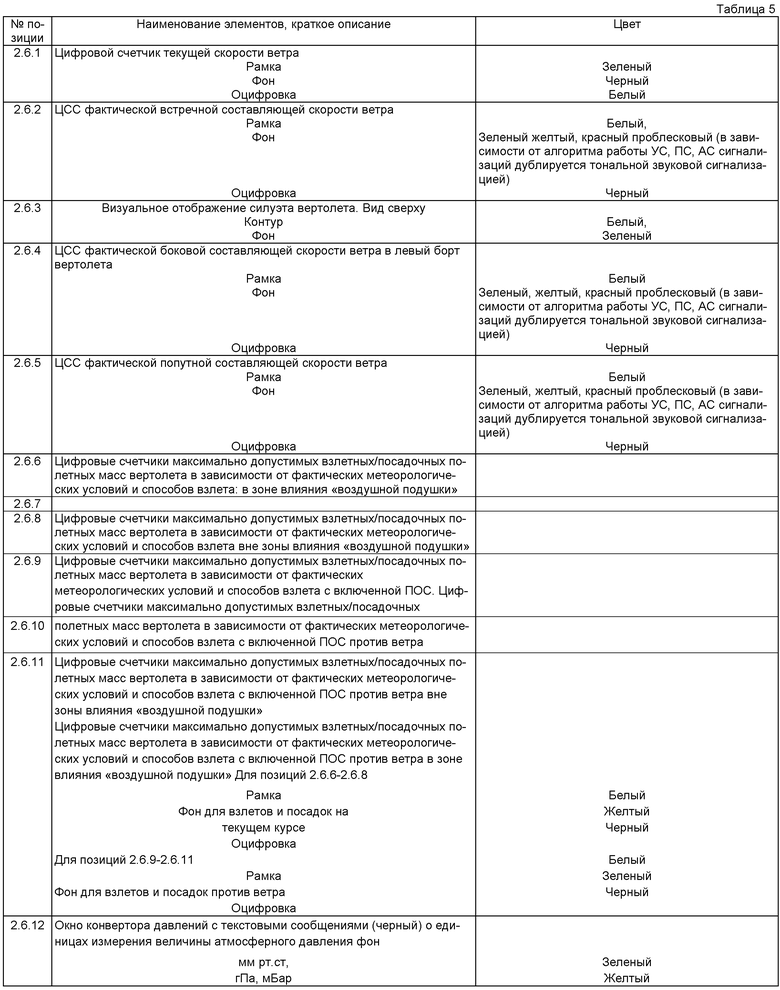
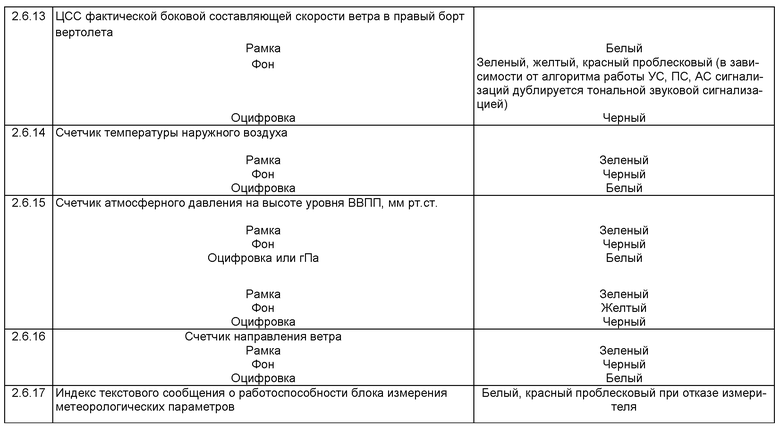
Использование технических средств визуализации полета одновинтового вертолета в сочетании с применением бортовой системы аварийно-предупреждающей сигнализации, функционирующей на различных физических принципах (световая, звуковая, тактильная), а также применение цветовой когнитивной графики значительно уменьшают психофизиологическую нагрузку на членов экипажа и сокращают их ошибочные действия при пилотировании вертолета в СМУ, особенно на малых и предельно малых высотах, зонах взлета и посадки в быстроменяющейся аэродинамической обстановке за счет создания индикации, соответствующей эффективному образу полета, приближенному к визуальному.
Таким образом, когнитивный пилотажный индикатор расширяет функциональные возможности ИКБО вертолета в части повышения уровня осведомленности экипажа по пилотажным и навигационным параметрам, позволяющим безошибочно оценить сложившуюся аэродинамическую ситуацию в сложных метеорологических условиях, в т.ч. при потере экипажем визуальной видимости подстилающей поверхности и ориентиров на ней. Это позволяет уменьшить время принятия решений по управлению вертолетом за счет сокращения числа логических операций, уменьшения «зон сомнений» (логических операций, выполняемых членами экипажа при дефиците (или отсутствии) информации за счет представления экипажу полного набора параметров аэродинамики полета вертолета, параметров управления и параметров внешних воздействующих факторов).
СВП в отличие от прототипа дополнительно в своем составе содержит современный измерительно-вычислительную систему, аппаратно содержащую в своем составе:
- электронный измерительно-вычислительный комплекс, предназначенный для определения параметров пространственного положения вертолета и динамики движения вертолета с учетом особенностей его динамики и возможностью определения путевой скорости продольного и поперечного перемещения вертолета (вперед-назад, влево-вправо), угловых скоростей вращения относительно связанных осей вертолета, определения малых величин углов крена, тангажа на стоянке до запуска силовых установок, в процессе запуска силовых установок и раскрутки трансмиссии в моменты отрыва/приземления, висения, вертикального набора высоты, снижения с функциональными возможностями обеспечения безопасности взлетов и посадок на необорудованные площадки и площадки, подобранные с воздуха, имеющие различные углы наклона (продольные и поперечные), неизвестную плотность покрытия, вызывающего при посадке неравномерную просадку пневматиков шасси с последующим опрокидыванием вертолета (определение углов наклона ВВПП). Дополнительно вышеназванный блок вырабатывает аварийно-предупреждающую визуальную сигнальную информацию, выполненную с применением когнитивных технологий, и продублированную звуковой тональной сигнализацией;
- электронный измерительно-вычислительный комплекс, предназначенный для определения высотно-скоростных параметров и метеорологических параметров, влияющих на безопасность полета: истинной воздушной скорости, в том числе и в диапазоне малых скоростей, приборной скорости, абсолютной барометрической высоты, относительной барометрической высоты, вертикальной скорости снижения/набора, скорости и направления ветра, продольной и поперечной составляющих скорости ветра, величины атмосферного давления, температуры наружного воздуха, определения максимально допустимых взлетных/посадочных масс в зависимости от методов и способов взлета, непосредственно зависящих от метеоусловий в месте взлета и посадки с аварийно предупреждающими сигнализаторами достижения вертолетом минимально безопасной высоты полета, опасной скорости полета, опасной скорости ветра и его боковой и попутной составляющих, опасной вертикальной скорости снижения для предотвращения попадания вертолета в режим «ВИХРЕВОЕ КОЛЬЦО»;
- электронный измерительно-вычислительный комплекс, предназначенный для определения параметров органов управления и динамики их движения: угла отклонения ручки «ШАГ-ГАЗ» и темпа его перемещения, темпа перемещения педалей управления шагом РВ, параметров динамики вращения НВ и режимов работы силовых установок с визуальными и тактильными аварийно-предупреждающими сигнализаторами опасного темпа перемещения ручки «ШАГ-ГАЗ», опасного темпа перемещения педалей управления углами установки лопастей РВ, опасного падения/превышения частоты вращения НВ;
- аппаратные и аппаратно-программные средства комплексирования видеоизображений подстилающей поверхности и подвижных/неподвижных препятствий на ней с целью получения улучшенного инструментального изображения закабинного пространства при любых метеорологических условиях и независимо от характера покрытия ВВПП;
- электронные средства аварийно-предупреждающей сигнализации: визуальные, звуковые, тактильные о приближении и выходе контролируемых параметров полета на границы летных эксплуатационных значений в соответствии с требованиями РЛЭ и аэродинамики конкретного типа вертолета, функционирующие на принципах когнитивности и работающие с динамическим и статическим упреждением.
Другим отличием является использование нового формата представления пилотажной (параметрической и сигнальной) визуальной информации, обеспечивающей повышение эффективности управления вертолетом и безошибочность управляющих действий за счет:
- отображения информации на индикаторах - комбинере ИЛС, навигационном индикаторе и КПИ, интуитивно напоминающих экипажу условия пилотирования вертолета по правилам визуальных полетов (ПВП), т.е. в простых метеорологических условиях, за счет применения когнитивного представления пилотажной, навигационной и сигнальной информации на них;
- создания средств отображения информации, на информационном поле которых выполнено отображение функционально сгруппированных приборов, максимально приближенных к индикаторам пространственного положения вертолета и которые не требуют концентрации внимания зрительного анализатора, минимизирующих необходимость переключения внимания, обеспечивающая быстрое, точное, легкое восприятие параметрической и сигнальной информации (с первого взгляда) для всех пространственных положений вертолета, и которые позволяют экипажу выполнить эффективный ручной вывод вертолета в безопасный режим полета из любого пространственного положения;
- создания визуального информационного обеспечения, характеризующего особенности динамики полета вертолета, параметры внешних воздействующих факторов, особенности управления вертолетом (координация движения, темп перемещения, соразмерность, направление);
- применения способа отображения параметрической и сигнальной информации, необходимой для безопасного пилотирования вертолета на всех этапах и режимах полета, имеющей верхние/нижние пределы в полном диапазоне отображаемой информации без применения шкально-стрелочных индикаторов (или индикаторов «типа часы»), которые заменены на цифровые счетчики-сигнализаторы, неподвижные/подвижные и всплывающие индексы, всплывающие текстовые сообщения, включающие изменение цвета фона цифрового счетчика и цвета фона индексов в зависимости от величины текущего значения контролируемого параметра (зеленый, желтый, красный проблесковый) и в зависимости от алгоритмов работы уведомляющей, предупреждающей и аварийной сигнализации, выполненной со статическим и динамическим упреждением. Данные средства отличаются тем, что изменением цвета фона ЦСС (цифровой счетчик-сигнализатор) отображается тенденция изменения параметра, что не требует обращения членов экипажа к долговременной памяти для анализа многочисленных летных эксплутационных ограничений параметров полета вертолета, зависящих в свою очередь от этапов, режимов полета, полетной массы, заставляющих экипаж обращаться к долговременной памяти и необходимости производить в уме оперативные действия по вычислению допустимых значений контролируемых параметров, что значительно снижает психофизиологическую нагрузку на экипаж при инструментальном пилотировании вертолета в сложных метеорологических условиях, а значит, направлено на предотвращение ошибочных действий пилота (экипажа) и соответственно на повышение уровня безопасности полета.
Предложенные СВП и КПИ позволяют значительно расширить функциональные возможности существующих средств информационного обеспечения за счет представления экипажу визуального отображения параметров динамики движения вертолета, его пространственного положения и местоположения на всех этапах и режимах полета, характерных для одновинтовых вертолетов, независимо от времени года, суток при любых метеорологических условиях, в том числе и при видимости, близкой к нулю, и которые дополнительно обеспечивают:
- индикацию (представление экипажу на комбинере ИЛС, расположенном на фоне лобового стекла остекления фонаря кабины вертолета) линии искусственного горизонта при любых метеоусловиях полета, которая по своему положению, перемещению соответствует линии истинного (естественного) горизонта, видимой членами экипажа из кабины вертолета в простых метеорологических условиях. В этом случае у экипажа есть «пространство неба», «плоскость земли» и линия горизонта, расположенная в глубине индикатора за счет применения 3D-формата;
- индикацию положения и перемещения «своего» вертолета в пространстве, который отображается на полноцветном когнитивном пилотажном индикаторе вертолета (КПИ) в виде макета вертолета (для пилотов удобнее и привычнее - в виде макета самолета), движущегося по крену относительно неподвижной условной линии горизонта на фоне подвижной линии, разделяющей «пространство неба» и «плоскость Земли» - вращающейся картушки, расположенной «в глубине» индикатора в 3D-формате. При этом индикация пространственного положения выполняется в соответствии с требованиями эргономики и не вызывает у экипажа психофизической нагрузки при определении пространственного положения вертолета, так как направление поворота (перемещения) органов управления вертолетом полностью соответствует вращению макета самолета в ту же сторону как по темпу, так и по соразмерности движения органов управления и полностью соответствует вращению самого вертолета относительно плоскости земного горизонта;
- индикацию перемещения вертолета вперед-назад, влево-вправо, вращения влево-вправо относительно подстилающей поверхности на режимах висения, перемещения на малых высотах, взлета, вертикальном снижении и приземлении;
- индикацию траектории снижения относительно плоскости истинного горизонта в зоне ограничений вертикальной скорости снижения с учетом поступательной скорости снижения и истинной высоты полета, необходимых экипажу для предотвращения попадания вертолета в режим «вихревое кольцо»;
- индикацию темпа (скорости) перемещения рычага «ШАГ-ГАЗ» и педалей управления углами установки лопастей РВ;
- индикацию максимально допустимой взлетной/посадочной массы в зависимости от способов взлета/посадки, определенной для фактических метеорологических условий в местах взлета/посадки;
- индикацию информации о фактических метеорологических условиях полета - скорости и метеорологического направления ветра, величинах атмосферного давления на высоте уровня расположения ВВПП и температуры наружного воздуха, продольной и поперечной составляющих скорости ветра;
- индикацию информации о характере препятствий (неподвижные и подвижные объекты, их высота и расстояние до них) и техническом состоянии поверхности ВВПП (ямы, бугры и др.) предполагаемого места приземления и о предварительной оценке углов продольного и поперечного уклонов места приземления до момента попадания вертолета в снежный или пыльный вихрь на высоте не менее 100 метров, позволяющей экипажу оценить возможность производства безопасной посадки;
- индикацию продольных и поперечных углов вертолетной взлетно-посадочной площадки перед запуском силовых установок и раскрутки трансмиссии, рулении, в моменты отрыва и приземления вертолета;
- индикацию аварийной предупреждающей сигнальной информации (визуальной, а также звуковой, тактильной), оповещающей экипаж о приближении параметрической информации к максимально/минимально допустимым в условиях эксплуатации значениям, необходимой экипажу для безопасного пилотирования вертолета по следующим параметрам:
- угол наклона ВВПП предполагаемого места приземления на этапе снижения и захода на посадку на высотах не менее 100 метров;
- угол наклона ВВПП на этапах до запуска силовых установок, руления, отрыва и приземления вертолета;
- углы крена и тангажа на всех режимах полета вертолета в соответствии с существующими эксплутационными ограничениями;
- продольные, поперечные скорости перемещения вертолета на этапах маневрирования на малых высотах, висения, вертикального набора высоты и снижения, приземления;
- угловая скорость рыскания на всех этапах и режимах полета;
- продольная и поперечная составляющие скорости ветра на этапах до запуска силовых установок, руления, перемещения на малых высотах, вертикального набора высоты и снижения;
- визуальная и тактильная сигнализация превышения темпа перемещения ручки «ШАГ-ГАЗ» установленных эксплуатационных ограничений и перемещения ручки «ШАГ-ГАЗ» в положение более 11 градусов (для вертолетов типа Ми-8);
- визуальная и тактильная сигнализация падения/превышения частоты вращения НВ установленных эксплуатационных ограничений.
Заявленные система визуализации полета и когнитивный пилотажный индикатор базируются на современной элементной базе, освоенной промышленностью. В программно-аппаратном комплексе использованы последние достижения науки и техники в области формирования улучшенного отображения подстилающей поверхности. Разработаны новые алгоритмы определения параметров динамики движения вертолета, его управления, параметров внешних воздействующих факторов.
Таким образом, удается достичь заявленного технического результата для системы визуализации полета, а именно: создание улучшенной системы визуализации пилотажных параметров полета и закабинного пространства, функционирующей при любых метеорологических условиях на всех этапах и режимах полета вертолета независимо от технических характеристик подстилающей поверхности, включающей улучшенную бортовую систему аварийно-предупреждающей сигнальной информации, за счет разработки дополнительных электронных измерительно-вычислительных комплексов и существенного расширения функциональных возможностей существующих бортовых систем вертолета.
А также достичь технического результата для когнитивного пилотажного индикатора: создание нового формата представления пилотажно-навигационной информации, выполненного с применением когнитивных технологий, который позволяет экипажу осуществить эффективный ручной вывод вертолета из любого пространственного положения в безопасный режим полета.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕЛЛЕКТУАЛЬНЫЙ ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС ЭКИПАЖА ВЕРТОЛЕТА ПО ВЫСОТНО-СКОРОСТНЫМ ПАРАМЕТРАМ И ПАРАМЕТРАМ ВОЗДУШНОЙ СРЕДЫ, ОКРУЖАЮЩЕЙ ВЕРТОЛЕТ | 2019 |
|
RU2729891C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОЙ ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА ВЕРТОЛЕТА ПО ВЫСОТНО-СКОРОСТНЫМ ПАРАМЕТРАМ И ПАРАМЕТРАМ ВОЗДУШНОЙ СРЕДЫ, ОКРУЖАЮЩЕЙ ВЕРТОЛЕТ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2730814C2 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА НА ОСНОВЕ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2015 |
|
RU2605222C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ КРУГЛОСУТОЧНОГО ДЕЙСТВИЯ, КОМПЛЕКС РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЕМЫЙ НА ДАННОМ ВЕРТОЛЕТЕ | 2008 |
|
RU2360836C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ | 2002 |
|
RU2212632C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОЙ ПОСАДКИ ВЕРТОЛЕТА В УСЛОВИЯХ ОТСУТСТВИЯ ИЛИ ОГРАНИЧЕННОЙ ВИДИМОСТИ | 2014 |
|
RU2561496C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ ТАКТИЧЕСКОГО НАЗНАЧЕНИЯ | 2003 |
|
RU2226166C1 |
| ТРЕНАЖЕР ЭКИПАЖА ВЕРТОЛЕТА С БОРТОПЕРАТОРОМ ВНЕШНЕЙ ПОДВЕСКИ | 2005 |
|
RU2294019C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА | 2012 |
|
RU2520174C2 |
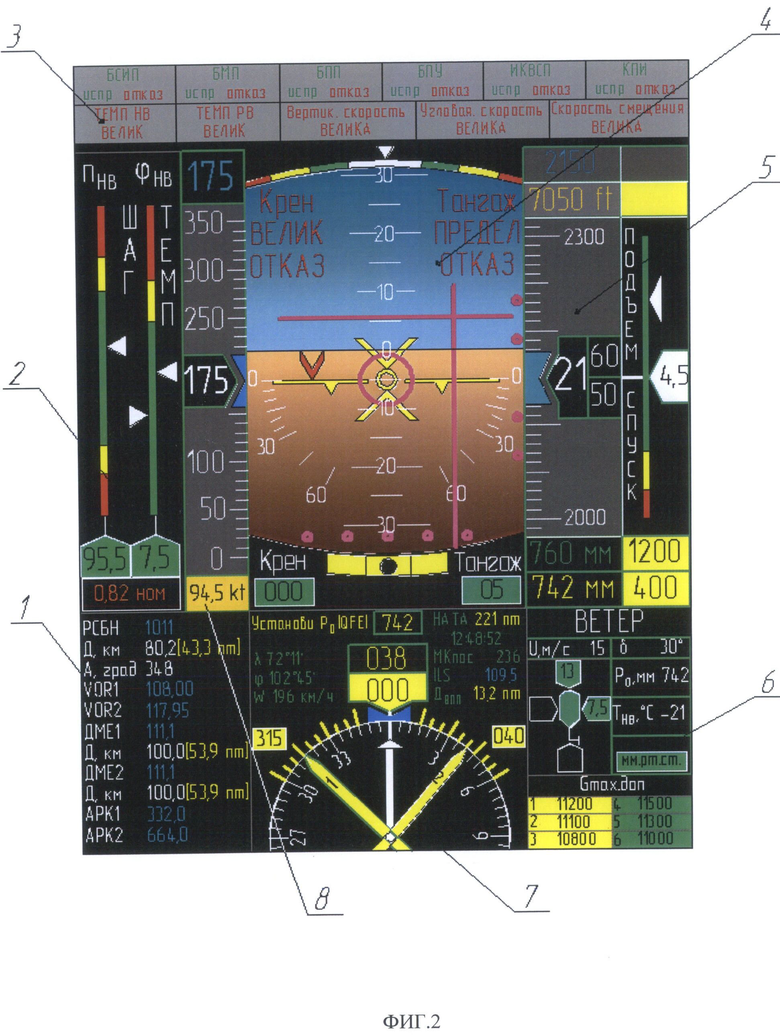
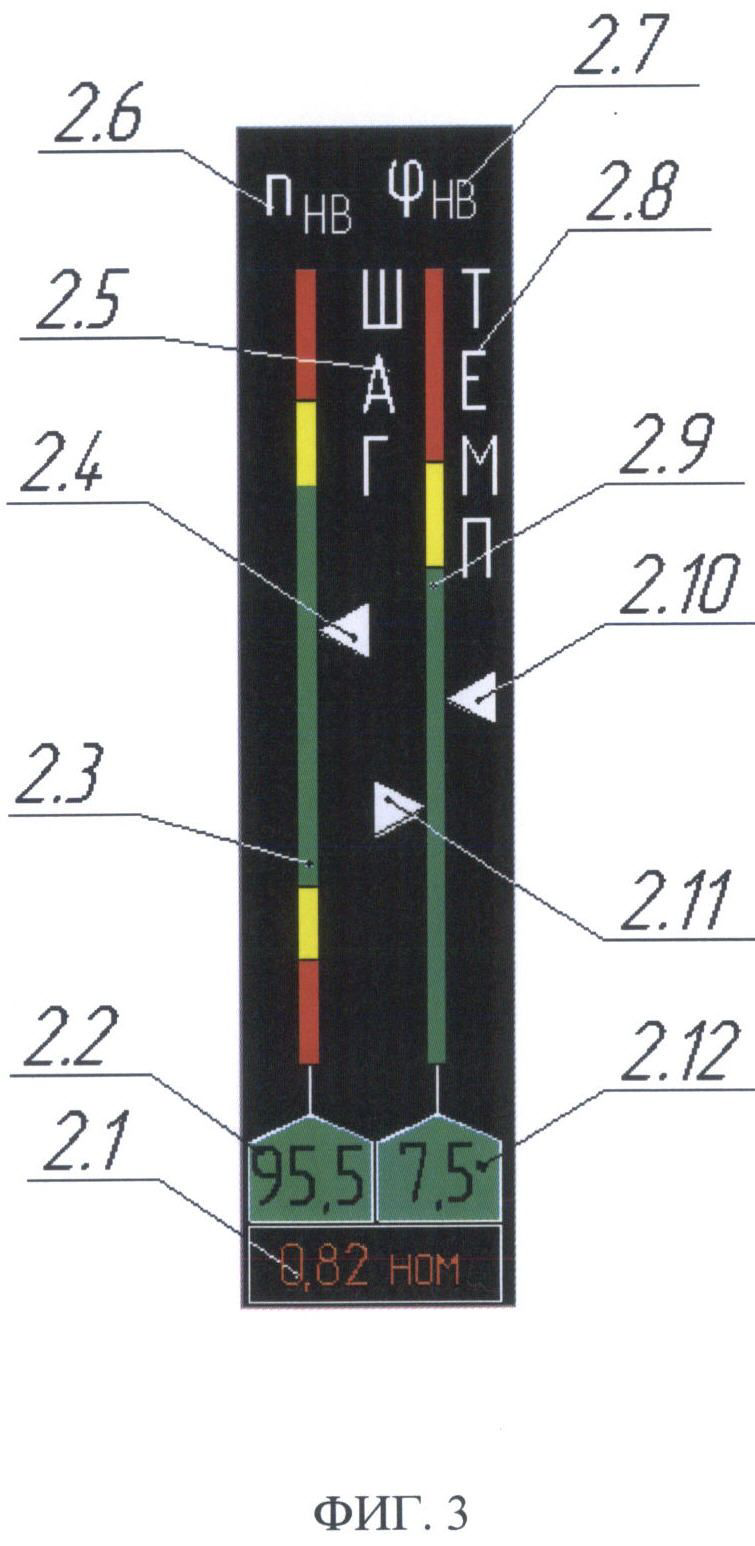
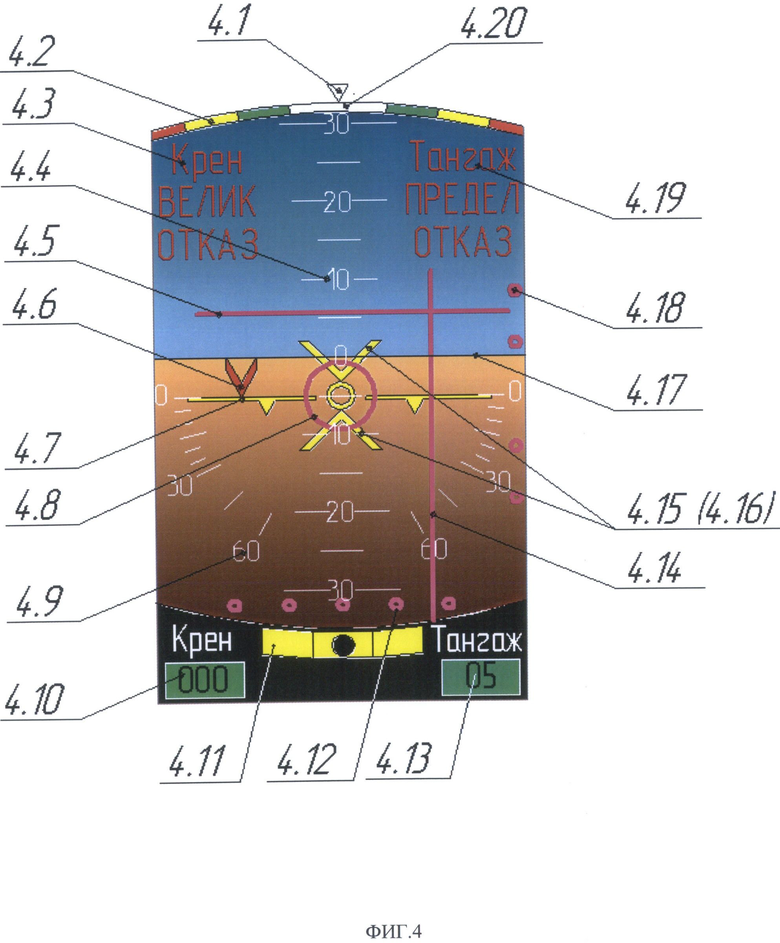
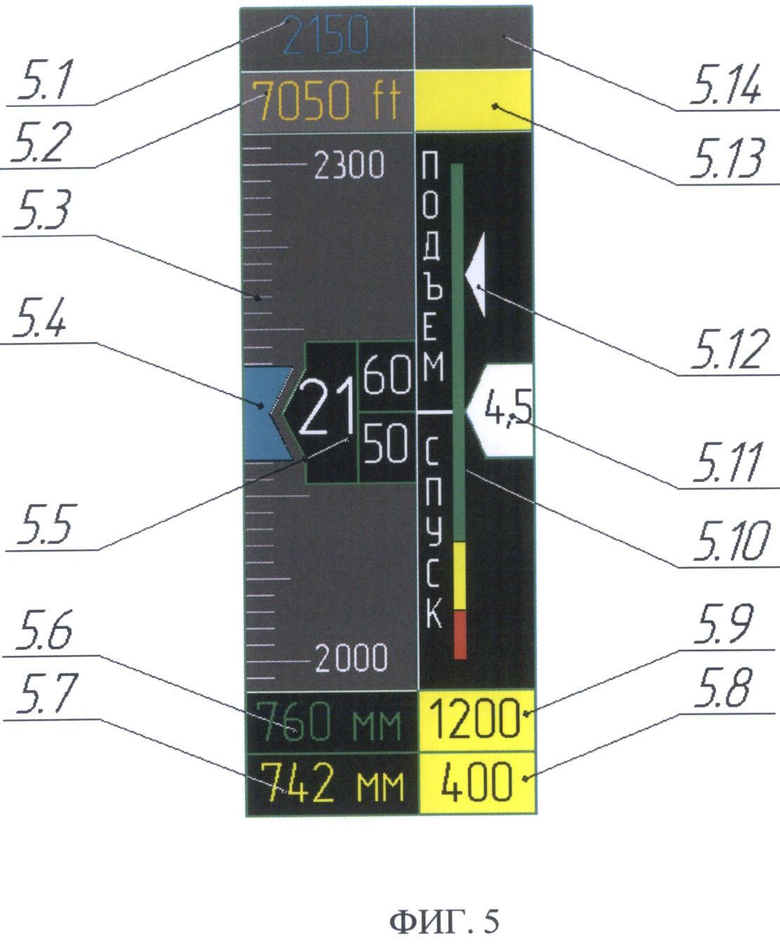
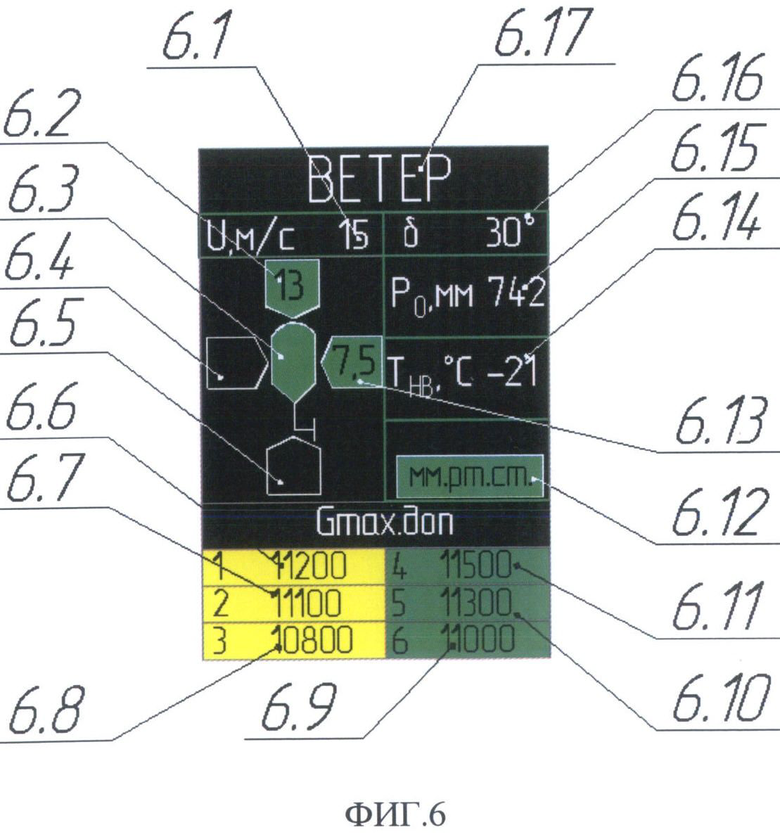
Группа изобретений относится к интегрированным комплексам бортового оборудования вертолета, в частности к системе визуализации полета и когнитивному пилотажному индикатору. Техническим результатом является повышение эффективности системы визуализации пилотажных параметров полета и закабинного пространства за счет применения когнитивных технологий. На когнитивном пилотажном индикаторе дополнительно отображены параметры динамики движения, параметры органов управления и динамики их перемещения, метеорологические параметры на всех режима полета, а также максимально допустимая взлетно-посадочная масса, предварительная и/или окончательная оценка продольных и поперечных углов наклона взлетно-посадочной площадки и характера препятствий на ней, а также визуальная аварийно-предупреждающая сигнальная информация по вышеперечисленным параметрам, при этом однооконный формат представления пилотажной информации отображает цифровые счетчики-сигнализаторы, неподвижные/подвижные индексы, всплывающие индексы, всплывающие текстовые сообщения, изменяющие свой цвет и цвет фона в зависимости от величины текущего значения контролируемого параметра и от алгоритмов работы улучшенной бортовой системы аварийно-предупреждающей сигнальной информации. 2 н. и 4 з.п. ф-лы, 6 ил., 5 табл.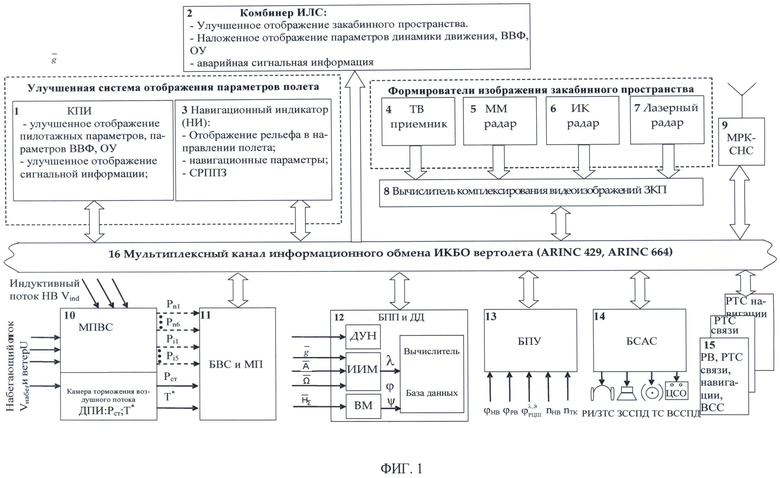
1. Система визуализации полета одновинтового вертолета, содержащая размещенные на приборной доске пилотов комплексный пилотажный индикатор, навигационный индикатор, средства формирования инструментальной видимости закабинного пространства и подвижных/неподвижных препятствий на ней, функционирующие в реальном режиме времени, средства формирования и отображения инструментальной синтезированной видимости закабинного пространства на этапах набора высоты, горизонтального полета и снижения с отображением рельефа подстилающей поверхности в 3D-формате, электронный измерительно-вычислительный комплекс определения параметров пространственного положения, электронный измерительно-вычислительный комплекс определения высотно-скоростных параметров, электронный измерительно-вычислительный комплекс определения навигационных параметров, электронный измерительно-вычислительный комплекс определения параметров управления, приемник спутниковой навигационной системы, соединенные между собой мультиплексным цифровым каналом информационного обмена, отличающаяся тем, что комплексный пилотажный индикатор выполнен в виде когнитивного пилотажного индикатора, она дополнительно содержит пилотажный индикатор на фоне лобового стекла остекления кабины экипажа, средства формирования и отображения улучшенной инструментальной видимости закабинного пространства, содержащие дополнительно вычислитель комплексирования видеоизображений, полученных от формирователей улучшенного изображения закабинного пространства, функционирующие в реальном масштабе времени, средства формирования улучшенной инструментальной видимости закабинного пространства на этапах набора высоты, горизонтального полета, снижения до высоты принятия решений, содержащие базу данных о рельефе местности повышенной точности с реализацией алгоритма «впередсмотрящего», многоканальный панорамный приемник воздушных давлений набегающего воздушного потока и индуктивного потока и температуры заторможенного потока воздуха, электронный измерительно-вычислительный комплекс определения параметров пространственного положения, дополнительно определяющий параметры динамики движения, навигационные параметры, продольно-поперечные углы наклона взлетно-посадочной площадки, электронный измерительно-вычислительный комплекс определения высотно-скоростных параметров, дополнительно определяющий метеорологические параметры окружающей среды на всех этапах и режимах полета и максимально допустимую взлетно-посадочную массу, электронный измерительно-вычислительный комплекс определения параметров управления, определяющий дополнительно параметры динамики перемещения органов управления, многоканальный многорежимный приемник спутниковой навигационной системы, дополнительно определяющий параметры пространственного положения, угол сноса, истинную высоту полета и обеспечивающий экипаж спутниковой связью и Интернетом, улучшенную бортовую систему аварийно-предупреждающей сигнальной информации, содержащую дополнительно источники речевой информации, звуковой тональной сигнализации, звуковых сигналов сильного привлекающего действия, визуальные сигнализаторы сильного привлекающего действия и вибро-тактильные сигнализаторы, взаимодействующие через мультиплексный канал информационного обмена с упомянутыми электронными измерительно-вычислительными комплексами, каждый из которых содержит блок памяти пороговых значений контролируемых параметров.
2. Система визуализации полета по п.1, отличающаяся тем, что пилотажный индикатор на фоне лобового стекла остекления кабины экипажа содержит инструментальное отображение закабинного пространства и препятствий на нем в реальном режиме времени, на которое наложено символьное отображение параметров пространственного положения и динамики перемещения вертолета, высотно-скоростные параметры с отображением метеорологических параметров в зонах взлета и посадки, параметров органов управления и их динамики перемещения, параметров продольных и поперечных углов наклона взлетно-посадочных площадок и аварийно-предупреждающую сигнальную информацию по вышеперечисленным параметрам.
3. Система визуализации полета по п.2, отличающаяся тем, что многоканальный панорамный приемник воздушных сигналов выполнен в виде приемника воздушных давлений набегающего потока воздуха, индуктивного потока воздуха, образованного от работы несущего винта, ветра, и содержит камеру полного торможения воздушных потоков, где размещены датчики температуры и статического давления заторможенного потока воздуха.
4. Когнитивный пилотажный индикатор, отличающийся тем, что на нем дополнительно к существующим стандартным пилотажным параметрам отображены параметры динамики движения, параметры органов управления и динамики их перемещения, метеорологические параметры на всех режима полета, а также максимально допустимая взлетно-посадочная масса, предварительная и/или окончательная оценка продольных и поперечных углов наклона взлетно-посадочной площадки и характера препятствий на ней, а также визуальная аварийно-предупреждающая сигнальная информация по вышеперечисленным параметрам, а индикация параметров пространственного положения представляет собой макет вертолета/самолета, движущегося по крену на фоне подвижной линии относительно неподвижной условной линии горизонта и на фоне подвижной линии, разделяющей «пространство неба» и «плоскость земли», при этом направление перемещения органов управления соответствует перемещению макета в ту же сторону как по темпу, так и по соразмерности движения органов управления и вращению, и перемещению самого вертолета относительно плоскости земного горизонта.
5. Когнитивный пилотажный индикатор по п.4, отличающийся тем, что в однооконном формате представления пилотажной параметрической и сигнальной информации, имеющей верхние и нижние пределы, отображены цифровые счетчики-сигнализаторы, неподвижные/подвижные индексы, всплывающие индексы, всплывающие текстовые сообщения, изменяющие свой цвет и цвет фона в зависимости от величины текущего значения контролируемого параметра и от алгоритмов работы улучшенной бортовой системы аварийно-предупреждающей сигнальной информации.
6. Когнитивный пилотажный индикатор по п.5, отличающийся тем, что однооконный формат представления пилотажной параметрической и сигнальной информации выполнен в виде функционально сгруппированных указателей пилотажных параметров, которые находятся в непосредственной близости от указателей параметров пространственного положения.
| СПОСОБ ВЫПОЛНЕНИЯ СНИЖЕНИЯ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2002 |
|
RU2280888C2 |
| СПОСОБ АВТОНОМНОГО ФОРМИРОВАНИЯ ПОСАДОЧНОЙ ИНФОРМАЦИИ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2348981C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 2009 |
|
RU2410719C2 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

