Изобретение относится у области авиации и может быть использовано для управления взлетом, маршрутным полетом, групповым полетом, возвратом и посадкой беспилотных летательных аппаратов (БПЛА), для управления движением автотранспортного средства при доставке летательного аппарата к пункту старта, обеспечения катапультного взлета и посадки с помощью аэрофинишера, а также для подготовки полетного задания и тренировок операторов в условиях моделирования полета БПЛА, причем управление ведущим и взаимодействующими летательными аппаратами может осуществляться операторами при размещении конструкции на автотранспортном средстве, так и отдельно от него.
Известна система управления беспилотным летательным аппаратом, содержащая оборудование управления летательного аппарата, размещенное в его корпусе и состоящее из нескольких типов пассивных датчиков (инфракрасных, телевизионных камер и пр.), а также соответствующей аппаратуры. На борту БПЛА также установлены система радионавигационного оборудования, система радиоэлектронного управления, бортовой вычислитель, блок коммутаций для передачи данных от датчиков и получения входных управляющих команд в масштабе реального времени, антенна для приема управляющих команд и передачи на пульт оператора полетных данных БПЛА.
В состав оборудования оператора входит вычислитель (компьютер), предназначенный для формирования команд управления и преобразования их в управляющие сигналы, в соответствии с заданной программой полета, которые передаются на борт БПЛА посредством оборудования связи через антенну оператора.
Передаваемые с пульта управления оператора управляющие сигналы принимаются антенной БПЛА, от которой данные сигналы поступают в оборудование для связи БПЛА. Управляющий сигнал с приемной антенны поступает в демодулятор/декодер блока связи БПЛА, где обрабатывается соответствующим образом и поступает в компьютер и в радиоэлектронное оборудование БПЛА, которые обрабатывают управляющие сигналы и формируют команды для управляющих элементов БПЛА на выполнение заданных оператором маневров.
Истинный курс БПЛА выдается его навигационным оборудованием. Данные об истинном курсе кодируются в соответствующие сигналы и передаются на вычислитель оператора.
Система предусматривает управление полетом БПЛА с использованием электронной карты. Оборудование оператора может быть как стационарным, так и передвижным.
(см. Патент РФ №2145725, Кл. МКИ G 05 D 1/10, 1995 г.) - наиболее близкий аналог.
В результате анализа известной системы необходимо отметить, что при ее функционировании не обеспечивается в достаточной мере безопасность захода на посадку и посадки летательного аппарата на необорудованные места посадки, когда дистанционное управление усложняется из-за отсутствия наземной курсоглиссадной системы и сложных метеоусловий, а также из-за того, что в режиме посадки у оператора возникает необходимость интенсивного попеременного контроля параметров полета и внешней обстановки, не обеспечиваемого рациональным представлением экипажу (операторам) информации для одновременного восприятия внешнего пространства (внешней обстановки), параметрической и сигнальной информации.
Отсутствуют средства транспортировки БПЛА и механизации работ по подготовке к запуску, выполнению предполетных и послеполетных операций, отсутствует система подготовки полетного задания и средства тренировки операторов по управлению БПЛА в условиях моделирования его полета и применения. Не обеспечивается также управление групповым взаимодействием БПЛА.
Задачей настоящего технического решения является разработка комплекса управления летательными аппаратами, позволяющего повысить безаварийность и эффективность полетов, расширить возможности авиационного комплекса за счет осуществления эффективного управления группой БПЛА в экстремальных условиях, а также создание информационно-управляющих полей операторов, дающих возможность одновременно видеть главные пилотажные параметры, внешнюю обстановку и опасные состояния, и позволяющее оператору формировать адекватные управляющие воздействия при полетах на режимах высокоточного маневрирования в маловысотном полете над сложным рельефом местности, захода на посадку и посадки на необорудованный аэродром в сложных условиях, обеспечить управление групповым взаимодействием БПЛА, обеспечить оперативный маневр применением БПЛА, путем комплексирования наземного управления ЛА, средств транспортировки беспилотного летательного аппарата и механизации работ по подготовке запусков, предполетных и послеполетных операций, а также системы подготовки полетного задания и средства тренировок операторов в условиях моделирования полета и применения БПЛА.
Решение поставленной задачи обеспечивается тем, что в комплекс управления летательными аппаратами, содержащий рабочее место оператора-летчика со средствами задания полетных параметров для автоматического управления летательными аппаратами, органами ручного дистанционного управления ЛА, пилотажным и навигационным индикаторами, вычислительную управляющую систему, интерфейсные блоки, модуль связи комплекса с летательными аппаратами для задания ведущему и взаимодействующим летательным аппаратам управляющих сигналов и получения от них информации о выполнении полетного задания для обеспечения взлета, группового полета двух-трех летательных аппаратов, возврата и посадки, а также для тренировок операторов, включено рабочее место оператора полезной нагрузки, содержащее два многофункциональных индикатора для отображения цифровой картографической, телевизионной и оптико-электронной информации, дисплей для псевдообъемного отображения внешней визуальной обстановки и обучающей информации, пульт управления полезной нагрузкой и блок формирования полетного задания, а на пилотажном рабочем месте оператора-летчика дополнительно установлен пульт управления режимами целеуказания, коррекции информации и построения виртуальной глиссады и дисплей для визуализации процесса управления летательными аппаратами, при этом функционирование вычислительной управляющей системы обеспечивается взаимодействием программных модулей самолетовождения и диспетчеризации управления летательными аппаратами при групповом полете, эталонной модели траекторного управления, базы геоинформационных данных, оценки опасных состояний и формирования информации для предупреждения столкновений с земной поверхностью и вывода ЛА из опасных состояний, формирования электронной аэронавигационной карты и топографической карты для вождения автотранспортного средства, формирования полетного и тренировочного задания, построения виртуальной глиссады для режимов целеуказания места посадки, коррекции полетной информации и посадки по виртуальной глиссаде, формирования псевдообъемного изображения внешней визуальной обстановки и модуля обучающей информации, в то же время доставка летательных аппаратов к пункту старта и их техническая эксплуатация обеспечивается включением в состав комплекса управления летательными аппаратами автотранспортного средства, в кабине которого установлены дисплей для отображения цифровой топографической карты и спутниковая навигационная система для определения местоположения, в кунге - система электроснабжения, дисплей для отображения функционирования систем автотранспортного средства и пульт управления, в торцевой части кунга манипулятор для погрузки и разгрузки грузов, а на прицепе - катапультное устройство и аэрофинишер, при этом основные составляющие наземной части комплекса электрически связаны между собой и конструктивно объединены в единую механическую внешне защищенную мобильную конструкцию с возможностью обеспечения совместной и раздельной работы операторов по управлению ведущим и взаимодействующими летательными аппаратами как при размещении конструкции на автотранспортном средстве, так и отдельно от него.
При проведении патентных исследований не обнаружены решения, идентичные заявленному, а следовательно, заявленное изобретение соответствует критерию «новизна».
Считаем, что сведений, изложенных в материалах заявки, достаточно для практического осуществления технического решения.
Сущность предлагаемого изобретения поясняется чертежами, на которых:
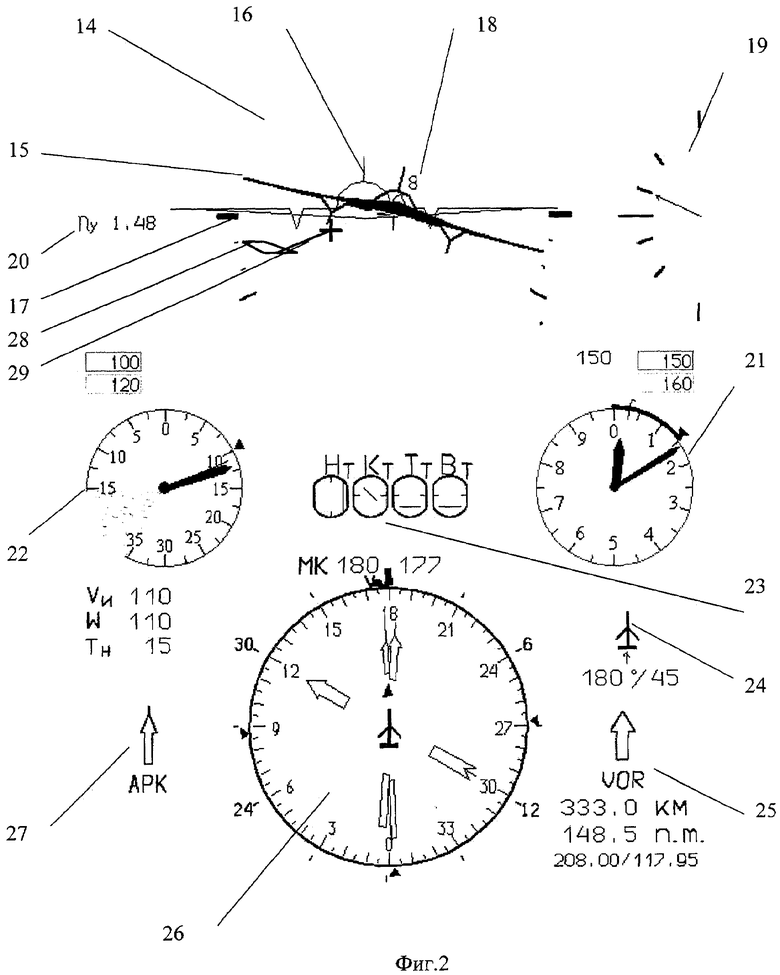
- на фиг.1 представлена блок-схема комплекса управления летательными аппаратами;
- на фиг.2 представлен информационный кадр пилотажного индикатора для режимов траекторного управления БПЛА, целеуказания, захода на посадку и посадки;
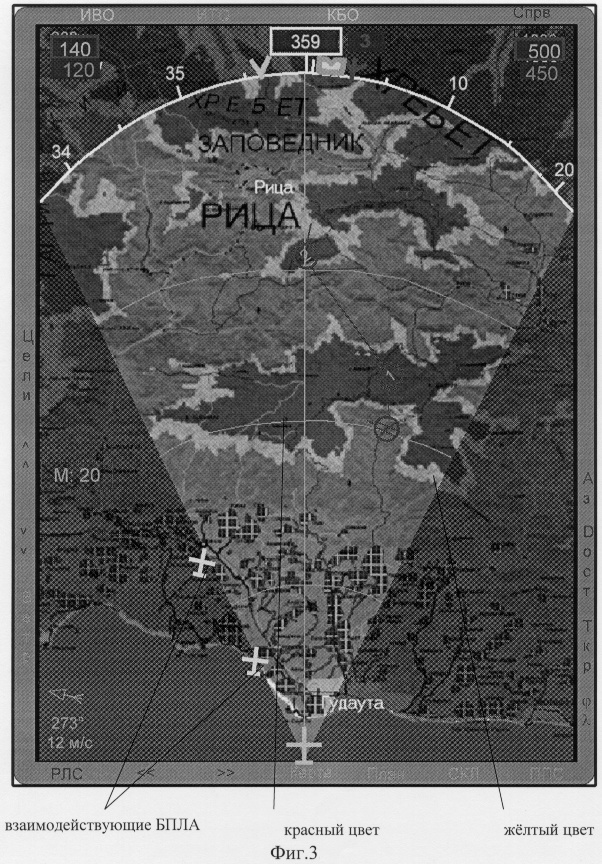
- на фиг.3 представлен информационный кадр аэронавигационной карты с символами ведущего и двух взаимодействующих БПЛА;
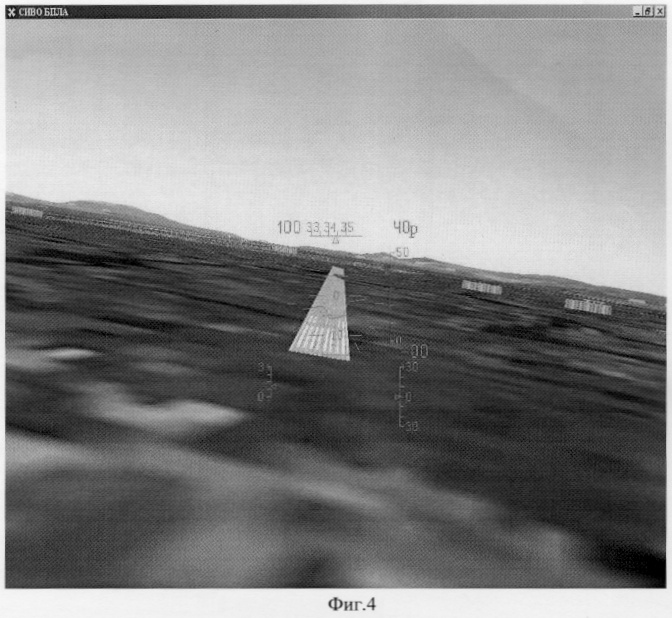
- на фиг.4 представлен информационный кадр системы имитации телевизионного изображения на этапе посадки.
Комплекс управления летательными аппаратами содержит рабочее место оператора-летчика 1, вычислительную управляющую систему 2, интерфейсные блоки 3, модули связи 4 и 5 наземного пункта управления с летательными аппаратами 6 и 7 для задания управляемому 6 и взаимодействующим 7 летательным аппаратам управляющих сигналов и получения от них информации о выполнении полетного задания, рабочее место оператора полезной нагрузки 8; автотранспортное средство 9, манипулятор 10 для погрузки и разгрузки грузов на платформу или прицеп 13; катапультное устройство 11, используемое при старте ЛА, и аэрофинишер 12, используемый при посадке.
Пилотажное рабочее место оператора-летчика 1 содержит средства задания полетных параметров 1 г для автоматического управления летательными аппаратами, органы ручного дистанционного управления ЛА 1д, пульт упраления режимами целеуказания, коррекции информации и построения виртуальной глиссады 1е, пилотажный индикатор 1а, навигационный индикатор 1в и дисплей для визуализации процесса управления летательным аппаратом 1б, которые связаны с вычислительной управляющей системой и модулями связи 4 и 5 через интерфейсные блоки 3.
Органы ручного дистанционного управления ЛА 1д включают в себя:
- ручку управления, формирующую сигналы по каналам тангажа и крена, и расположенную под правую руку оператора;
- педали, формирующие сигналы по каналу рыскания (курса);
- ручку управления двигателем, расположенную под левую руку оператора.
Вместо двухканальной ручки управления и педалей может быть применена трехстепенная (трехканальная) ручка управления. Пульт управления режимами 1е содержит:
- кнопку режима целеуказания;
- кнюппель потенциометрический или тензометрический, расположенный на ручке управления под большим пальцем правой руки, сигналы которого обеспечивают перемещение прицельной марки;
- кнопку привязки к месту посадки (ориентиру), расположенную на пульте;
- задатчик курса виртуальной ВГШ (потенциометрический или цифровой).
Вычислительная управляющая система 2 содержит программные модули: самолетовождения 2а, эталонной модели траекторного управления 2б, базы геоинформационных данных 2в, оценки опасных состояний и вывода ЛА из опасных состояний 2г, формирования электронной аэронавигационной и топографической карты 2д, формирования полетного и тренировочного задания 2е, построения виртуальной глиссады 2ж, формирования псевдообъемного отображения внешней обстановки 2з и модуля обучающей информации 2и.
Функционирование системы обеспечивается взаимодействием программных модулей самолетовождения и диспетчеризации управления летательными аппаратами при групповом полете 2а, эталонной модели траекторного управления 2б, базы геоинформационных данных 2в, оценки опасных состояний и вывода ЛА из опасных состояний 2г, формирования электронной аэронавигационной карты и топографической карты 2д, подготовки полетного и тренировочного задания 2е, построения виртуальной глиссады 2ж, коррекции полетной информации и посадки по виртуальной глиссаде, формирования псевдообъемного отображения внешней обстановки 2з и модуля обучающей информации 2и.
Управляемый объект 6 и взаимодействующие летательные аппараты 7 содержат модули связи 6а и 7а с наземным пунктом управления и бортовым оборудованием, модули связи 6г и 7г с взаимодействующими летательными аппаратами, телевизионную систему и оптико-электронное визирное устройство 6б и 7б, систему автоматического управления с бортовыми датчиками и модуль навигации 6в и 7в.
Рабочее место оператора полезной нагрузки 8 и управления тренировкой операторов содержит два многофункциональных индикатора 8а и 8в для отображения цифровой картографической, телевизионной и оптико-электронной информации, дисплей 8б для псевдообъемного отображения внешней визуальной обстановки и обучающей информации, пульт управления полезной нагрузкой 8г и блок формирования полетного задания 8д.
Автотранспортное средство 9 содержит дисплей для отображения цифровой топографической карты 9а и спутниковую навигационную систему 9б, установленые в кабине, систему электроснабжения 9в, дисплей функционивания систем автотранспортного средства 9г и пульт управления вспомогательными средствами 9д, расположенные в кунге, манипулятор 10, установленный в торцевой части кунга, катапультное устройство 11 и аэрофинишер 12, размещаемые на прицепе 13.
На мнемокадре пилотажной командно-лидерой информации отображаются пилотажно-навигационные параметры полета, формируемые модулем самолетовождения 2а, информация о положении виртуальной глиссады, о целеуказании места посадки и ориентира (геоточки), о коррекции информации, а также о курсоглиссадной информации, формируемые модулем виртуальной глиссады 2ж в режимах захода на посадку и посадки на малооборудованный аэродром.
Курсоглиссадная информация для посадки по виртуальной глиссаде отображается на многофункциональном индикаторе 1а.
Для формирования глиссады на индикаторе дополнительно индицируется прицельная марка, символ глиссады, символ виртуальной взлетно-посадочной полосы (ВПП) и символ вектора текущей скорости. Прицельная марка совмещается оператором-летчиком с началом взлетно-посадочной полосы, наблюдаемой с помощью телевизионного или оптико-электронного визирного устройства в интересах получения дополнительной информации, которая используется в вычислительной управляющей системе для формирования виртуальной глиссады. При пилотировании с прицеливанием вектором скорости на этапе посадки прицельная марка совмещается с началом посадочной полосы.
Расположение и форма представления информации на индикаторе обеспечивают наиболее рациональные условия для восприятия внекабинной обстановки, параметрической и сигнальной информации, коррекции параметров траекторного движения и формирования образа полета, в соответствии с которым летчик осуществляет управляющие воздействия.
Информационный кадр, приведенный на фиг.2 содержит:
авиагоризонт - поз.14;
силуэт самолета - поз.15;
символ «лидера» - поз.16;
шкала крена - поз.17;
счетчик тангажа - поз.18;
шкалу вертикальной скорости - поз.19;
счетчик перегрузки - поз.20;
высотомер - поз.21;
указатель скорости - поз.22;
индикатор работы рулевых приводов системы автоматического управления - поз.23;
указатель скорости и направления ветра - поз.24;
группа счетчиков системы VOR - поз.25;
пилотажно-навигационный прибор - поз.26;
символ работы системы авиационного радиокомпаса - поз.27;
символ взлетно-посадочной полосы (ВПП) - поз.28;
символ глиссады - поз.29.
Символ ВПП (поз.28) формируется как трапеция, вершинами которой являются проекции на фронтальную плоскость габаритных точек выбранного в процессе целеуказания или рассчитанного аэродрома. Ширина аэродрома при расчете - 45 (40) метров, длина зависит от текущей конфигурации ЛА. При выполнении условия, что длина расчетного аэродрома не превышает фактическую (визуально видимую), возможно выполнение посадки.
Символ глиссады (поз.29) представляет собой линию, соединяющую расчетное место посадки (точку касания расчетной ВПП) с текущей точкой вхождения в глиссаду (продолжение оси ВПП от точки среза с углом наклона), но не далее точки четвертого разворота на больших дальностях. Размеры перекрестия соответствуют размерам среза курсоглиссадной зоны на этой дальности. При захвате радиотехнических средств аэродрома (при их наличии) появляются курсовые и глиссадные рамки соответственно.
Комплекс управления летательными аппаратами функционирует следующим образом.
Управление полетом БПЛА осуществляется с рабочих мест операторов. С пульта управления производится:
- задание полетного задания БПЛА;
- корректировка полетного задания;
- корректировка режимов полета (курса, угла наклона траектории, высоты, скорости полета и т.д.);
- корректировка текущей задачи управления;
- целераспределение;
- управление группой БПЛА;
- распознавание и привязка целей и др.;
- управление траекторным движением БПЛА;
- управление полезной нагрузкой БПЛА;
- управление взаимодействующим БПЛА;
- управление заходом на посадку и посадкой на необорудованное оперативное место посадки в сложных условиях путем целеуказания места посадки, формирования параметров посадочной полосы и виртуальной глиссады.
Управляющие воздействия на БПЛА задаются с рабочего места оператора-летчика 1 на вычислительную управляющую систему 2, где обрабатываются, вводятся в управляющую программу и посредством аппаратуры связи 5 и 6а передаются на БПЛА 6 в систему управления 6в. Поступившие управляющие сигналы обрабатываются системой управления 6в и соответствующие управляющие сигналы передаются на элементы управления летательными аппаратами, которые управляют их положением в соответствии с поступившими сигналами управления. Пилотажные параметры летательных аппаратов постоянно определяются датчиками. Сигналы с датчиков передаются на систему управления 6в, расположенную на БПЛА, обрабатываются и посредством аппаратуры связи 6а и 5 через интерфейсный модуль 3 передаются на вычислительную управляющую систему 2, обрабатываются и передаются на рабочее место оператора-летчика 1, а также на рабочее место оператора полезной нагрузки 8.
В процессе полета информацию о параметрах полета оператор-летчик получает от многофункциональных индикаторов 1а и 1в, а оператор полезной нагрузки - от многофункциональных индикаторов 8а и 8в.
Информация о пилотажных параметрах БПЛА выводится на цветной жидкокристаллический монитор индикатора 1а и 8а.
Информация о навигационных параметрах БПЛА, цифровая картографическая, телевизионная и оптико-электронная информация выводится на цветные жидкокристаллические мониторы индикаторов 1в и 8в. Телевизионная и оптико-электронная информация поступает от телевизионного и оптико-электронного визирных устройств 6б, установленных на БПЛА 6, посредством аппаратуры связи 6а и 5 через интерфейсный модуль 3.
Формирование кадров авиагоризонта и фрагментов индикации пилотажных параметров, а также формирование псевдообъемного изображения опасных состояний траекторного маневрирования производится по сигналам реального положения БПЛА, заданных значений пилотажных параметров и опасных состояний траекторного маневрирования.
На навигационный индикатор 8в из вычислительной управляющей системы 2 передаются данные электронной карты, навигационной обстановки и положения опасных состояний при нахождении БПЛА вблизи земли. Оператор получает визуализированные сведения о заданной траектории полета, реальной траектории, привязанной к электронной карте, а также сведения о нахождении БПЛА относительно земли.
Таким образом комплекс управления летательными аппаратами содержит:
- рабочее место оператора-летчика,
- рабочее место оператора полезной нагрузки,
- вычислительную управляющую систему,
- интерфейсные блоки,
- модули связи наземного пункта управления с летательными аппаратами,
- беспилотные летательные аппараты,
- автотранспортное средство.
В кабине автотранспортного средства установлены:
- дисплей для отображения цифровой топографической карты
- спутниковая навигационная система для определения местоположения,
а в кунге:
- система электроснабжения,
- дисплейный индикатор функционивания систем автотранспортного средства,
- пульт управления вспомогательными устройствами, в торцевой части кунга установлен манипулятор для погрузки и разгрузки грузов на платформу или прицеп. На прицепе размещены:
- катапультное устройство, используемое при старте ЛА,
- аэрофинишер, используемый при посадке.
Основные составляющие наземной части комплекса:
- рабочее место оператора-летчика,
- рабочее место оператора полезной нагрузки,
- вычислительную управляющую систему,
- интерфейсные блоки,
- модули связи наземного пункта управления с летательными аппаратами,
электрически связаны между собой и конструктивно объединены в единую механическую внешне защищенную мобильную конструкцию с возможностью обеспечения совместной и раздельной работы операторов по управлению ведущим и взаимодействующими летательными аппаратами как при размещении конструкции на автотранспортном средстве, так и отдельно от него.
Такое техническое решение позволяет:
- повысить безаварийность и эффективность полетов,
- расширить возможности авиационного комплекса,
- обеспечить управление групповым взаимодействием БПЛА,
- обеспечить оперативный маневр применением БПЛА,
- проводить тренировки операторов без запусков БПЛА.
С использованием материалов данного предложения проведено моделирование на диалоговом моделирующем стенде и получены положительные результаты, подтверждающие целесообразность предложенного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2022 |
|
RU2791341C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ | 2002 |
|
RU2212632C1 |
| ИНТЕГРАЛЬНЫЙ ПИЛОТАЖНО-НАВИГАЦИОННЫЙ ДИСПЛЕЙ | 1991 |
|
RU2014250C1 |
| Способ обеспечения централизованного управления группы беспилотных летательных аппаратов с использованием сервера-агрегатора | 2023 |
|
RU2809495C1 |
| СПОСОБ УПРАВЛЕНИЯ БОРТОВЫМ ОБОРУДОВАНИЕМ МНОГОФУНКЦИОНАЛЬНОГО ОДНОМЕСТНОГО БОЕВОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2828758C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2392586C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ КРУГЛОСУТОЧНОГО ДЕЙСТВИЯ, КОМПЛЕКС РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЕМЫЙ НА ДАННОМ ВЕРТОЛЕТЕ | 2008 |
|
RU2360836C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2019 |
|
RU2725928C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2011 |
|
RU2488775C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
Изобретение относится к технике приборостроения и может быть использовано в системах управления летательными аппаратами. Технический результат - расширение функциональных возможностей. Для достижения данного результата дополнительно введено рабочее место оператора полезной нагрузки, содержащее два многофункциональных индикатора для отображения цифровой картографической, телевизионной и оптико-электронной информации, дисплей для псевдообъемного отображения внешней визуальной обстановки и обучающей информации, пульт управления полезной нагрузкой и блок формирования полетного задания. При этом на рабочем месте оператора-летчика дополнительно установлен дисплей для визуализации процесса управления летательным аппаратом и пульт управления режимами целеуказания места посадки, коррекции информации и построения виртуальной глиссады. 4 ил.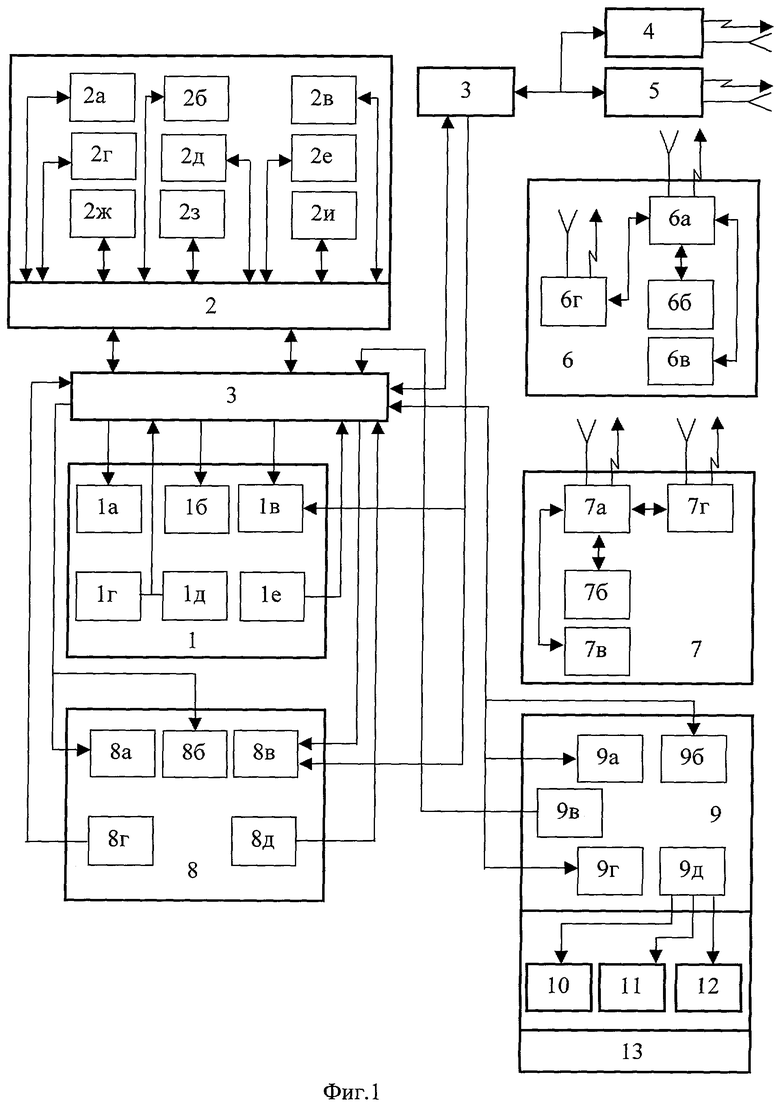
Комплекс управления летательными аппаратами (ЛА), содержащий рабочее место оператора-летчика со средствами задания полетных параметров для автоматического управления летательными аппаратами, органами ручного дистанционного управления ЛА, пилотажным индикатором и навигационным индикатором, вычислительную управляющую систему, интерфейсные блоки, модуль связи комплекса с летательными аппаратами для задания ведущему и взаимодействующим летательным аппаратам управляющих сигналов и получения от них информации о выполнении полетного задания, отличающийся тем, что в его состав включены рабочее место оператора полезной нагрузки, содержащее два многофункциональных индикатора для отображения цифровой картографической, телевизионной и оптико-электронной информации, дисплей для псевдообъемного отображения внешней визуальной обстановки и обучающей информации, пульт управления полезной нагрузкой и блок формирования полетного задания, а на рабочем месте оператора-летчика дополнительно установлен дисплей для визуализации процесса управления летательным аппаратом и пульт управления режимами целеуказания места посадки, коррекции информации и построения виртуальной глиссады, при этом функционирование вычислительной управляющей системы обеспечивает взаимодействие программных модулей самолетовождения и диспетчеризации управления летательными аппаратами при групповом полете, эталонной модели траекторного управления, базы геоинформационных данных, оценки опасных состояний, формирования информации для предупреждения столкновений с земной поверхностью и вывода летательных аппаратов из опасных состояний, формирования электронной аэронавигационной карты с тактической обстановкой и топографической карты для вождения автотранспортного средства, подготовки полетного и тренировочного задания, построения виртуальной глиссады для режимов целеуказания, коррекции полетной информации и посадки по глиссаде, формирования псевдообъемного отображения внешней визуальной обстановки и модуля обучающей информации, а также включено автотранспортное средство, в кабине которого установлены дисплей для отображения цифровой топографической карты и спутниковая навигационная система для определения местоположения, в кунге - система электроснабжения, дисплей для отображения функционивания систем автотранспортного средства и пульт управления, в торцевой части кунга - манипулятор для погрузки и разгрузки грузов, а на прицепе - катапультное устройство и аэрофинишер, при этом основные составляющие наземной части комплекса электрически связаны между собой и конструктивно объединены в единую механическую внешне защищенную мобильную конструкцию с возможностью обеспечения совместной и раздельной работы операторов по управлению ведущим и взаимодействующими летательными аппаратами как при размещении конструкции на автотранспортном средстве, так и отдельно от него.
| СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕНАСТРОЙКОЙ КООРДИНАТ | 1995 |
|
RU2145725C1 |
| Максимов М.В., Горгонов Г.И | |||
| Радиоуправление ракетами | |||
| - М.: Сов | |||
| радио, 1964, с.518-521, рис.10.4 | |||
| US 5987371 А, 16.11.1999 | |||
| СПОСОБ ПРОИЗВОДСТВА УГЛЕВОДСОДЕРЖАЩЕГО ЖЕЛИРУЮЩЕГО КОНЦЕНТРАТА ДЛЯ КОНДИТЕРСКИХ ИЗДЕЛИЙ | 2003 |
|
RU2260304C2 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| US 5260874 A, 09.11.1993 | |||
| US 6319008 B1, 20.11.2001. | |||

