Изобретение относится к средствам наземного обслуживания авиационной техники, в частности к средствам для транспортировки, подъема и подвески боеприпасов на летательный аппарат.
Известен способ снаряжения летательных аппаратов боеприпасами, заключающийся в загрузке боеприпасов со складов хранения на транспортное средство с помощью технических средств для погрузочно-разгрузочных работ, доставке боеприпасов к площадке подготовки боеприпасов и осуществлении их выгрузки, проведении предварительной подготовки боеприпасов к боевому применению, осуществлении загрузки боеприпасов на тележки-подъемники и доставке их к летательным аппаратам, осуществлении в процессе буксировки транспортным средством последовательной отцепки тележек-подъемников от транспортного средства и перемещения их вручную под точки подвески летательных аппаратов, поднятии и креплении боеприпасов на узлах подвески летательных аппаратов вручную или с помощью гидравлического насоса, в зависимости от веса боеприпасов [1].
Известна система для снаряжения авиационной техники боеприпасами, которая содержит технические средства для погрузочно-разгрузочных работ - электрокары, краны, устройства с механическим или электрическим приводом, транспортное средство, тележки-подъемники, при этом специалисты осуществляют погрузку боеприпасов на транспортное средство с помощью электрокаров или устройств с механическим или электрическим приводом, перемещение боеприпасов транспортным средством до площадки подготовки боеприпасов, подготовку боеприпасов, погрузку их на тележки-подъемники и перемещение транспортным средством до стоянки летательного аппарата, отцепку тележки-подъемника и перемещение ее вручную до стыковочного узла летательного аппарата, обеспечивают поднятие боеприпасов с помощью гидравлического насоса и крепление их на узлах подвески [1].
Недостатками данных способа и системы является большой объем ручного труда. Тележка-подъемник предназначена только для поднятия боеприпаса. Она, как любой манипулятор, имеет ограниченную рабочую зону и с ее помощью довольно трудно сместить в стороны ракету или бомбу. Если, выставляя тележку, специалист ошибется на считанные сантиметры, то все придется начинать сначала: откатывать, разворачивать, подкатывать. В ряде случаев подвеска боеприпаса вручную требует меньше времени, а поэтому на выполнение данной операции командование привлекает весь имеющийся инженерно-технический состав. Несколько человек берут выложенный под точкой подвески боеприпас и под руководством специалиста группы вооружения приступают к его подвеске. Несмотря на высокие трудозатраты, раньше такой способ при определенных условиях был приемлем. На технике пятого поколения он будет невозможным. К примеру, у перспективного авиационного комплекса фронтовой авиации по ряду причин точки подвески вооружения будут расположены в грузоотсеке. Его размеры не позволят выполнить подвеску боеприпасов с использованием физической силы.
Наиболее близким к изобретению является способ снаряжения летательного аппарата боеприпасами, заключающийся в загрузке боеприпасов со складов на транспортное средство с помощью технических средств для погрузочно-разгрузочных работ, доставке боеприпасов транспортным средством к площадке подготовки боеприпасов и осуществлении их выгрузки, осуществлении подготовки боеприпасов к боевому применению, загрузке боеприпасов на самоходные транспортные средства и доставке их к стоянкам летательных аппаратов, управлении самоходной тележкой для доставки боеприпасов к узлам подвески летательного аппарата, осуществлении стыковки боеприпасов к узлам подвески летательного аппарата, при этом управление тележкой осуществляется с помощью джойстика как по кабелю, так и с использованием радиоканалов, а также с использованием голосовой системы управления устройством, управление платформой, на которой размещен боеприпас, осуществляют на основе изображения получаемого с компактных телевизионных камер, которые позволяют контролировать и корректировать процесс подвески боеприпаса в ограниченных пространствах вне визуальной видимости [1].
Наиболее близким к изобретению является система снаряжения авиационной техники боеприпасами, которая содержит технические средства для погрузочно-разгрузочных работ - электрокары, краны, устройства с механическим или электрическим приводом, транспортное средство, самоходные транспортные средства, при этом специалисты осуществляют погрузку боеприпасов на транспортные средства с помощью электрокаров или устройств с механическим и электрическим приводом, перемещение боеприпасов транспортным средством до площадки подготовки боеприпасов, подготовку боеприпасов, погрузку боеприпасов на самоходные транспортные средства и перемещение их до стыковочных узлов летательных аппаратов, поднятие боеприпасов и крепление их на узлах подвески с помощью платформы, которая имеет три степени движения и компактные телевизионные камеры, при этом управление тележкой осуществляется джойстиком как по кабелю, так и с использованием радиоканалов или голосовой системой управления устройством, управление перемещением платформы осуществляют на основе изображений, получаемых с видеокамер, которые позволяют контролировать и корректировать процесс подвески боеприпаса в ограниченном пространстве вне визуальной видимости [1].
Недостатками данного способа и устройства является невысокая степень автоматизации процесса снаряжения летательного аппарата боеприпасами, так как в процессе перемещения самоходного транспортного средства используется оператор, который дистанционно, через джойстик, управляет перемещением транспортного средства до узла подвески летательного аппарата, а также процессом поднятия и крепления груза. При этом, если выполнять последовательно данные работы, значительно увеличивается время снаряжения боеприпасами летательных аппаратов, а сокращение времени за счет параллельного выполнения данных работ потребует большого количества специалистов.
Технической задачей изобретения является уменьшение времени и трудозатрат при снаряжении летательных аппаратов боеприпасами за счет автоматизации этапов наведения самоходного транспортного робота к узлу подвески и подвески боеприпасов на летательные аппараты, что позволить значительно уменьшить время и количество специалистов.
Решение технической задачи достигается тем, что в способе снаряжения летательных аппаратов боеприпасами, заключающемся в загрузке боеприпасов со складов на транспортное средство с помощью технических средств для погрузочно-разгрузочных работ, доставке боеприпасов транспортным средством к площадке подготовки боеприпасов и осуществлении их выгрузки, обеспечении предварительной подготовки боеприпасов к боевому применению, дополнительно специалисты осуществляют загрузку боеприпасов на платформы транспортных роботов, которые обеспечивают одновременную доставку боеприпасов к реперным знакам, расположенным относительно летательных аппаратов на заданном расстоянии, путем приема сигналов инфракрасного излучения, размещенных на реперных знаках, при этом осуществляют перемещение каждого транспортного робота на основе выдачи управляющего сигнала на привод перемещения транспортного робота, блокируют прием сигналов транспортным роботом при достижения реперных знаков, осуществляют самонаведение каждого транспортного робота с боеприпасами к стыковочным узлам летательных аппаратов на основе приема сигналов инфракрасного излучения от передатчиков, размещенных на стыковочных узлах летательных аппаратов, и выдачи команд управления на привод перемещения каждого транспортного робота, перемещение каждого транспортного робота с боеприпасами к стыковочным узлам летательных аппаратов осуществляют в пределах секторов излучения первых, вторых и третьих сигналов инфракрасного излучения, при этом сектора излучения имеют разные размеры, обусловленные различными дальностями действия и углами излучения, определяют пространственное положение каждого транспортного робота с боеприпасами путем селекции сигналов инфракрасного излучения, осуществляют управление направлением перемещения каждого транспортного робота с боеприпасами на основе выдачи управляющих сигналов на привод перемещения каждого транспортного робота, при достижении каждым транспортным роботом третьего сектора определяют взаимное положение каждого транспортного робота относительно центральной линии стыковочного узла, на основе измерения двух расстояний относительно центра каждого транспортного робота, в случае равенства расстояний принимается, что транспортный робот и стыковочный узел расположены параллельно относительно друг друга, и осуществляют дальнейшее движения, в случае если расстояния не равны, вычисляют угол отклонения между каждым транспортным роботом с боеприпасами и стыковочным узлом, осуществляют поворот каждого транспортного робота с боеприпасами на двойные углы отклонения, осуществляют движение транспортного робота по прямой назад на расстояние N, для совмещения его центра с центральной линией стыковочного узла, при этом расстояние от центра транспортного робота до центральной точки стыковочного узла определяется в соответствии с выражением N=(L1+L2)/2+R, где (L1+L2)/2 - расстояние от центра транспортного робота с боеприпасами до центральной точки стыковочного узла, R - радиус транспортного робота с боеприпасами, осуществляют перемещение каждого транспортного робота с боеприпасами к стыковочному узлу на заданное расстояние от него, и дополнительно, проверяется параллельность каждого транспортного робота с боеприпасами относительно стыковочного узла летательного аппарата, в случае если они параллельны друг другу, то транспортный робот с боеприпасами стыкуется со стыковочным узлом, в случае если стыковка не произошла, то каждый транспортный робот отходит на заданное расстояние и повторно выполняет этап стыковки, в случае успешной стыковки происходит выдача команды «первичная стыковка завершена» с блока сигнализации стыковочного узла на блок управления транспортного робота, который выдает команду на привод платформы для поднятия и перемещения боеприпасов на фиксированные значения, при осуществлении заданных перемещений выдается команда блоком сигнализации «вторичная стыковка произошла», при этом передающее устройство, размещенное на каждом транспортном роботе передает на диспетчерский пункт информацию о времени, варианте загрузки и номере летательного аппарата, на котором произведена загрузка боеприпасов.
Заявляемый способ реализуется в системе снаряжения летательных аппаратов боеприпасами, содержащей боеприпасы, размещенные на складах, технические средства для погрузочно-разгрузочных работ, транспортные средства, при этом специалисты осуществляют погрузку боеприпасов на транспортные средства с помощью технических средств для погрузочно-разгрузочных работ, осуществляют перемещение боеприпасов транспортными средствами до площадки подготовки боеприпасов, осуществляют подготовку боеприпасов, в систему снаряжения дополнительно введены n-транспортные роботы с платформами для размещения боеприпасов, реперные знаки, которые размещены на заданном расстоянии относительно летательных аппаратов и имеют передающие устройства, блоки сигнализации стыковочных узлов летательных аппаратов, при этом специалисты осуществляют загрузку боеприпасов на платформы транспортных роботов, которые обеспечивают одновременную доставку боеприпасов к реперным знакам, расположенным относительно летательных аппаратов на заданном расстоянии, путем приема сигналов инфракрасного излучения, размещенных на реперных знаках, при этом осуществляют перемещение каждого транспортного робота на основе выдачи управляющего сигнала на привод перемещения транспортного робота, блокируют прием сигналов транспортным роботом при достижении реперных знаков, осуществляют самонаведение каждого транспортного робота с боеприпасами к стыковочным узлам летательных аппаратов на основе приема сигналов инфракрасного излучения от передатчиков, размещенных на стыковочных узлах летательных аппаратов и выдачи команд управления на привод каждого транспортного робота, перемещение каждого транспортного робота с боеприпасами к стыковочным узлам летательных аппаратов осуществляют в пределах секторов излучения первых, вторых и третьих сигналов инфракрасного излучения, при этом сектора излучения имеют разные размеры, обусловленные различными дальностями действия и углами излучения, определяют пространственное положение каждого транспортного робота с боеприпасами путем селекции сигналов инфракрасного излучения, осуществляют управление направлением перемещения каждого транспортного робота с боеприпасами на основе выдачи управляющих сигналов на привод каждого транспортного робота, при достижении каждым транспортным роботом третьего сектора определяют взаимное положение каждого транспортного робота относительно центральной линии стыковочного узла, на основе измерения двух расстояний относительно центра каждого транспортного робота, в случае равенства расстояний принимается, что транспортный робот и стыковочный узел расположены параллельно относительно друг друга, и осуществляют дальнейшее движение, в случае если расстояния не равны, вычисляют угол отклонения между каждым транспортным роботом с боеприпасами и стыковочным узлом, осуществляют поворот каждого транспортного робота с боеприпасами на двойные углы отклонения, осуществляют движение транспортного робота по прямой назад на расстояние N, для совмещения его центра с центральной линией стыковочного узла, при этом расстояние от центра транспортного робота до центральной точки стыковочного узла определяется в соответствии с выражением N=(L1+L2)/2+R, где (L1+L2)/2 - расстояние от центра транспортного робота с боеприпасами до центральной точки стыковочного узла, R - радиус транспортного робота с боеприпасами, осуществляют перемещение транспортного робота с боеприпасами к стыковочному узлу на заданное расстояние от него, и дополнительно, проверяется параллельность каждого транспортного робота с боеприпасами относительно стыковочного узла, в случае если они параллельны друг другу, то транспортный робот с боеприпасами стыкуется со стыковочным узлом, в случае если стыковка не произошла, то каждый транспортный робот отходит на заданное расстояние и повторно выполняет этап стыковки, в случае успешной стыковки происходит срабатывание микровыключателей, и выдача команд «первичная стыковка завершена» с блока сигнализации стыковочного узла на блок управления транспортного робота, который выдает команду на привод платформы для поднятия и перемещения боеприпасов на фиксированные значения, при осуществлении заданных перемещений срабатывает комбинация второй группы микровыключателей, которые расположены на точках подвески летательного аппарата и выдается команда блоком сигнализации «вторичная стыковка произошла», при этом передающее устройство, размещенное на каждом транспортном роботе, передает на диспетчерский пункт информацию о времени, варианте загрузки и номере летательного аппарата, на котором произведена загрузка боеприпасов.
Кроме того, транспортный робот содержит конструкцию в виде прямоугольника, вписанного в окружность, на котором размещены платформа для размещения боеприпасов, блок управления, привод перемещения транспортного робота, привод перемещения платформы, при этом первый вход блока управления имеет бесконтактную связь с реперным знаком, расположенным на заданном расстоянии относительно летательного аппарата, второй и третий входы имеют бесконтактные связи с первым и вторым выходом блока сигнализации стыковочного узла, первый и второй входы-выходы блока управления обеспечивают бесконтактный обзор заданной области пространства относительно передней полусферы транспортного робота, третий, четвертый и пятый выходы блока управления соединены соответственно с входами привода перемещения транспортным роботом, приводом перемещения платформы и бесконтактной связью с диспетчерским пунктом, блок управления содержит первый, второй и третий приемники, элемент И, элемент НЕ, первый, второй и третий элементы ИЛИ, согласующее устройство, первую и вторую микроЭВМ, первый и второй цифроаналоговые преобразователи, сдвиговой регистр, дифференцирующую цепь, блок селекции, первый и второй датчики расстояний, блок вычисления расстояний и углов, счетчик, первый дешифратор, n вторых дешифраторов, блок памяти, передающее устройство, причем первый, второй и третий входы блока управления являются входами первого, второго и третьего приемников, выход первого приемника соединен с первым входом элемента И, второй вход которого соединен с выходом элемента НЕ, а выход элемента И соединен с первым входом первого элемента ИЛИ, выход второго приемника соединен одновременно с входом элемента НЕ, входом дифференцирующей цепи, а также входом блока селекции и вторым входом первого элемента ИЛИ, выход третьего приемника соединен с первым входом сдвигового регистра, второй вход которого соединен с выходом дифференцирующей цепи, выход которой также соединен со вторым входом счетчика, выход блока селекции соединен со вторыми входами первого и второго датчиков расстояний, первые входы-выходы которых обеспечивают обзор пространства относительно передней полусферы транспортного робота, вторые выходы первого и второго датчиков информации соединены с входами блока вычисления расстояний и углов, выход которого соединен с третьим входом первого элемента ИЛИ, выход которого через согласующее устройство, первую микроЭВМ соединен с входом первого цифро-аналогового преобразователя, выходы сдвигового регистра через второй элемент ИЛИ соединены с первым входом счетчика, выход которого соединен с входом первого и входами n вторых дешифраторов, выход первого дешифратора соединен со вторыми входами второй микроЭВМ, первый вход которой соединен с выходом блока памяти, выход второй микроЭВМ соединен с входом второго цифроаналогового преобразователя, выход третьего элемента ИЛИ соединен со входом передающего устройства, выходы первого, второго цифроаналоговых преобразователей и передающего устройства являются третьими, четверыми и пятыми выходами блока управления.
Кроме того, блок сигнализации стыковочного узла содержит первое и второе передающее устройство, первый микровыключатель, группу вторых микровыключателей, блок логики, задатчик сигналов, элемент ИЛИ, причем первый микровыключатель соединен с входом первого передающего устройства, группа вторых микровыключателей соединена с первой группой входов блока логики, вторая группа входов соединена с выходами задатчика сигналов, выходы блока логики соединены с одними из входов элемента ИЛИ, выход которого соединен с входом второго передающего устройства, выходы первого и второго передающих устройств являются соответственно первым и вторым выходами блока сигнализации стыковочного узла, блок логики состоит из матрицы элементов И, матрицы триггеров, дифференцирующей цепи, причем первые и вторые входы матрицы элементов И соединены с первыми и вторыми входами блока логики, а выходы элементов И соединены с первыми входами триггеров, вторые входы которых соединены с выходом дифференцирующей цепи, вход которой соединен с источником питания, выходы триггеров являются выходами блока логики.
На фиг.1 приведена структурная схема процесса снаряжения летательного аппарата боеприпасами, на фиг.2 - график операций и временных интервалов процесса снаряжения летательных аппаратов боеприпасами, на фиг.3 - общий вид транспортного робота, на фиг.4 - структурная схема блока управления, на фиг.5 - схема сближения транспортного робота с блоком сигнализации узла подвески, на фиг.6 - схема определения угла подхода транспортного робота к узлу подвески, на фиг.7 - структурная схема блока сигнализации, на фиг.8 - структурная схема блока логики.
Система снаряжения летательных аппаратов боеприпасами содержит боеприпасы 1 размещенные на складах, технические средства 2 для погрузочно-разгрузочных работ, транспортные средства 3, площадки 4 подготовки боеприпасов, n-транспортных роботов 5, реперные знаки 6, которые размещены на заданном расстоянии относительно летательных аппаратов, блоки 7 сигнализации стыковочных узлов летательных аппаратов.
Транспортный робот 5 содержит платформу 8 для размещения боеприпасов в виде прямоугольника, вписанного в окружность, блок 9 управления, привод 10 транспортного робота, привод 11 платформы.
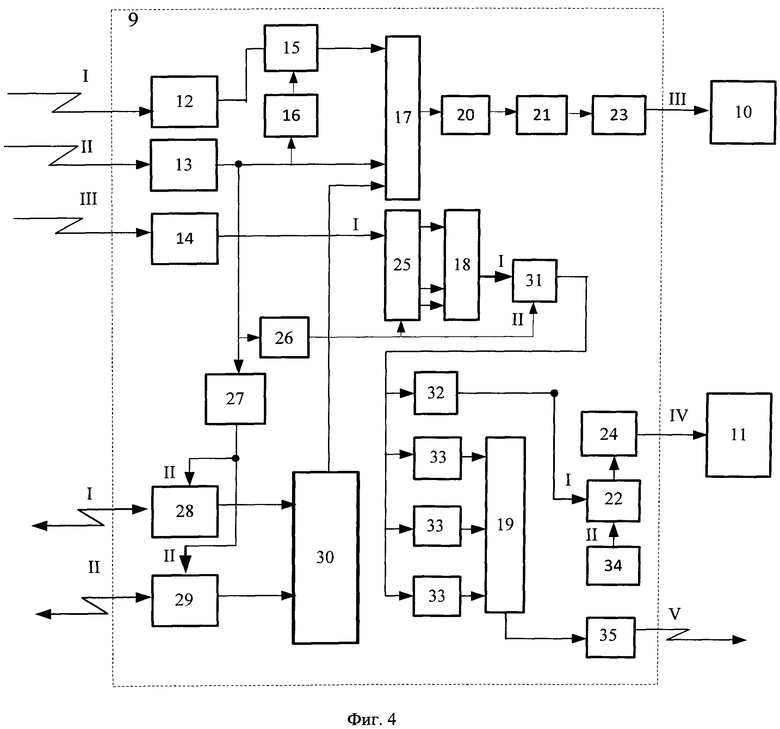
Блок 9 управления содержит первый 12, второй 13 и третий 14 приемники, элемент И 15, элемент НЕ 16, первый 17, второй 18 и третий 19 элементы ИЛИ, согласующее устройство 20, первую 21 и вторую 22 микроЭВМ, первый 23 и второй 24 цифро-аналоговые преобразователи, сдвиговой регистр 25, дифференцирующую цепь 26, блок 27 селекции, первый 28 и второй 29 датчики расстояний, блок 30 вычисления расстояний и углов, счетчик 31, первый 32 дешифратор, n вторых 33 дешифраторов, блок 34 памяти, передающее устройство 35.
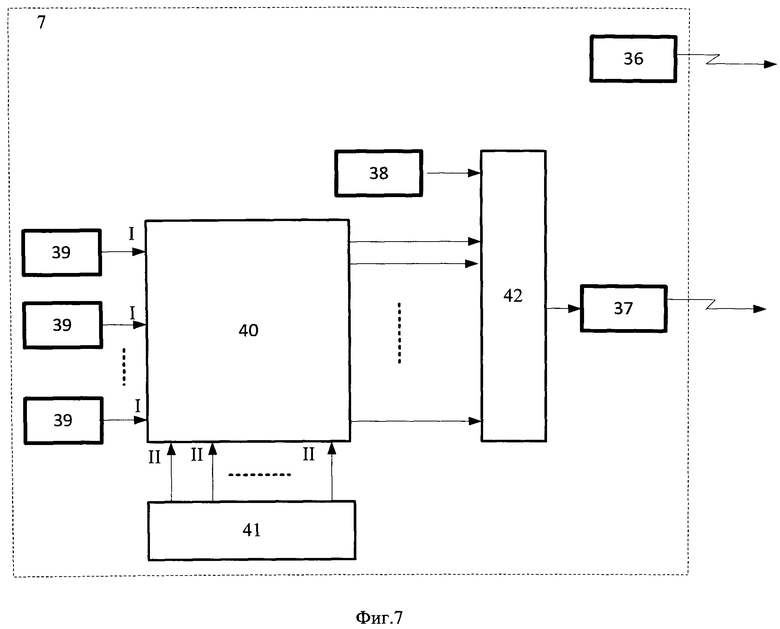
Блок 7 сигнализации стыковочного узла содержит первое 36 и второе 37 передающие устройства, первый 38 микровыключатель, группу вторых 39 микровыключателей, блок 40 логики, задатчик 41 сигналов, элемент ИЛИ 42.
Система снаряжения летательных аппаратов боеприпасами обеспечивает многоэтапный взаимосвязанный технологический процесс, который включает в свой состав большое количество разнородных технологических операций, выполнение которых можно классифицировать по четырем основным группам:
- погрузочно-разгрузочные операции;
- транспортировочные операции;
- операции подготовки авиационных средств к применению;
- операции подвески подготовленных АСП на летательный аппарат.
Загрузка боеприпасов со складов на транспортное средство осуществляется с помощью технических средств 2 для погрузочно-разгрузочных работ, электрокаров, кранов, или устройств с механическим, электрическим приводом.
Транспортное средство 3, осуществляет перемещение боеприпасов до площадки 4 подготовки боеприпасов. На площадке 4 подготовки боеприпасов инженерно-технический состав осуществляет предварительную подготовку боеприпасов.
С помощью технических средств 2 для погрузочно-разгрузочных работ (крана) боеприпасы (бомбу или ракету) перекладывают на платформы транспортных роботов 5, при этом боеприпасы размещают на ложементах, которые закреплены на платформах. Ложемент может быть выполнен, например, универсальным для нескольких возможных размеров груза. Ложемент образован дисками, шарнирно закрепленными в проушинах основания ложемента с возможностью их переустановки и фиксации, причем каждый диск выполнен с углублениями, соответствующими нескольким типоразмерам груза [2].
Транспортные роботы обеспечивают параллельную доставку боеприпасов к реперным знакам 6, которые расположены относительно летательных аппаратов на основе приема излучения электромагнитных сигналов, при этом каждый реперный знак излучает ЭМИ с разной частотой.
Электромагнитные импульсы через первый вход блока 9 управления, расположенного на транспортном роботе, поступают на вход первого 12 приемника, с выхода которого сигнал через первый вход элемента И 15, первый вход первого 17 элемента ИЛИ, согласующее устройство 20, поступает на вход первой 21 микроЭВМ, с выхода которой через первый 23 цифроаналоговый преобразователь на вход привода 11 транспортного робота (фиг.3, 4).
Первая 21 микроЭВМ обеспечивает формирование управляющего сигнала для движения транспортного робота 5 к реперному знаку относительно летательного аппарата.
После подхода транспортного робота 5 к реперному знаку 6 происходит прием излучаемого сигнала от блока 7 сигнализации узла подвески. При этом происходит блокирование выхода первого 12 приемника за счет выдачи сигнала с выхода второго 13 приемника на вход элемента НЕ 16, осуществляя тем самым снятие сигнала со второго входа элемента И 15 (фиг.4).
Сигнал с выхода второго 13 приемника поступает на второй вход первого 17 элемента ИЛИ, вход блока 27 селекции и вход дифференцирующей цепи 26, с выхода которой поступает на вторые входы сдвигового регистра 25 и счетчика 31, обеспечивая их обнуление (фиг.4).
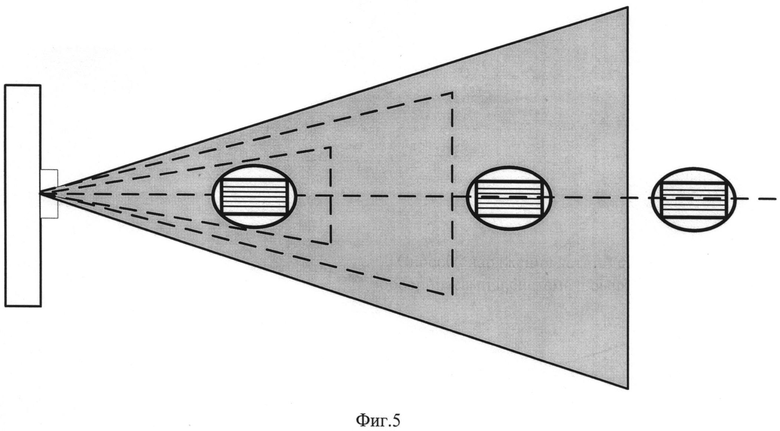
Сигнал с выхода первого 17 элемента ИЛИ поступает через согласующее устройство 20 на первую 23 микроЭВМ, с выхода которой через цифроаналоговый преобразователь 23 сигнал поступает на привод 10 транспортного робота 5, при этом осуществляется самонаведение транспортного робота 5 с боеприпасами к стыковочному узлу летательного аппарата на основе приема сигналов инфракрасного излучения от первого 36 передатчика, размещенного на блоке 7 сигнализации стыковочного узла летательного аппарата.
Перемещение транспортного робота 5 с боеприпасами к стыковочному узлу летательного аппарата осуществляется в пределах секторов излучения первых, вторых и третьих сигналов инфракрасного излучения, при этом сектора излучения имеют разные размеры, обусловленные различными дальностями действия и углами излучения (фиг.5).
При достижении каждым транспортным роботом третьего сектора инфракрасного излучения (фиг.6) определяется взаимное положение каждого транспортного робота относительно центральной линии стыковочного узла, на основе измерения двух расстояний относительно центра транспортного робота, это происходит за счет выдачи сигналов с выхода блока 27 селекции на вторые входы первого 28 и второго 29 датчиков расстояний, при этом сигналы с выходов датчиков поступают на первый и второй вход блока 30, который определяет угол отклонения между транспортным роботом и стыковочным устройством в соответствии с выражением
∠θ=90-G,
где угол G равен arccos (НТК), при этом
где H - разница между расстояниями L1 и L2, W - расстояние между первым и вторым датчиками определения расстояния.
Затем осуществляется поворот транспортного робота 5 на угол, равный двойному расчетному значению угла, и движение его по прямой назад на расстояние N для совмещения центра транспортного робота 5 с центральной линией стыковочного узла (фиг.6).
Расстояние от центра каждого транспортного робота 5 до центральной точки стыковочного узла определяется в соответствии с выражением:
N=M+R,
где М - расстояние от центра транспортного робота 5 до центральной точки стыковочного узла, R - радиус транспортного робота 5.
Расстояние М определяется в соответствии с формулой
M=(L1+L2)/2.
При совмещении центра каждого транспортного робота 5 и центральной линии стыковочного узла, транспортный робот 5 поворачивается так, что приемники сигналов системы самонаведения поворачиваются к центральной линии стыковочного узла в направлении против часовой стрелки на угол, равный θ, после этого транспортный робот 5 и стыковочный узел оказываются параллельными друг другу.
Затем осуществляется перемещение каждого транспортного робота 5 к стыковочному узлу на заданное расстояние от него, и дополнительно, проверяется параллельность транспортного робота 5 и стыковочного узла, в случае если они параллельны друг другу, то транспортный робот стыкуется со стыковочным узлом, при осуществлении стыковки происходит выдача команды «стыковка завершена» с блока 7 сигнализации стыковочного узла (фиг.7).
Это осуществляется следующим образом.
При стыковке транспортного робота со стыковочным узлом летательного аппарата происходит срабатывание первого 38 микровыключателя, и сигнал с его выхода через второй элемент ИЛИ 42 поступает на вход второго 37 передающего устройства, с выхода которого поступает на вход третьего 14 приемника блока 9 управления (фиг.7).
С выхода третьего 14 приемника (блока 9 управления) сигнал поступает на первый вход сдвигового регистра 25, с выходов которых через второй 18 элемент ИЛИ поступает на первый вход счетчика 31, с выхода которого через первый 32 дешифратор поступает на второй вход второй 22 микроЭВМ (фиг.4).
Первый 32 дешифратор обеспечивает расшифровку сигнала «первичная стыковка произошла».
Сигнал с выхода блока 34 памяти поступает на первый вход второй 22 микроЭВМ, с выхода которой управляющий сигнал через второй 24 цифроаналоговый преобразователь поступает на привод 11 платформы, которая осуществляет перемещение в соответствии с заданной программой из блока 34 памяти.
В результате перемещения платформы 8 в блоке 7 сигнализации узлов стыковки происходит срабатывание вторых 39 микровыключателей, при этом сигналы поступают на первую группу входов блока 40 логики, на вторую группу входов которого поступают сигналы с выхода задатчика 41 сигналов.
Блок 40 логики (фиг.8) обеспечивает сравнение сигналов поступающих на первые и вторые входы матрицы элементов И 43, с выходов которых сигналы поступают на первые входы триггеров 44, на вторые входы которых с выхода дифференцирующей цепи 45 поступает сигнал обнуления с выхода источника питания. В случае совпадения вариантов загрузки с заданными значениями, с выходов блока 40 логики поступают сигналы через элемент ИЛИ 42 на вход второго 37 передающего устройства (фиг.7).
Сигнал принимается третьим 14 приемным устройством (блока 9 управления), с выхода которого поступает на вход сдвигового регистра 25, с выхода которого через второй 18 элемент ИЛИ, счетчик 31 поступает на входы вторых 33 дешифраторов, с выхода которых через третий 19 элемент ИЛИ поступает на вход передающего устройства 35, которое обеспечивает передачу сигнала на диспетчерский пункт о времени стыковки, варианте загрузки и номере летательного аппарата (фиг.4).
Вторые дешифраторы 33 обеспечивают расшифровку сигнала «вторичная стыковка произошла» о варианте загрузки боеприпасами летательного аппарата и его номере.
Кроме того, осуществить автоматическую подвеску боеприпасов на узлы подвески летательного аппарата можно, например, на основе устройства для управления подвеской грузов на объект, которое содержит подвижную платформу для размещения грузов с датчиком исходного состояния, блок исполнительных двигателей и датчик положения объекта, первый коммутатор, цифроаналоговый преобразователь, схему вычитания, блок определения координат объекта, блок памяти, нуль-орган, второй коммутатор, датчик-ограничитель, датчик подвески [3].
Диспетчер осуществляет передачу информации о вариантах загрузки и номерах летательных аппаратов, на которых осуществлена загрузка ответственным лицам для осуществления контроля подвешенных боеприпасов, снаряжения взрывателями и блокировки механизма замка держателя чекой.
Таким образом, предлагаемое изобретение позволяет уменьшить время и количество специалистов для подвески боеприпасов за счет автоматизации процесса перемещения транспортного робота к стыковочному узлу и подвески боеприпасов.
Источники информации
1. Робот под крылом самолета, статья, Ю. Авдеев, газета «Красная звезда» от 25 февраля 2009 г.
2. Устройство для транспортировки, подъема и подвески грузов на летательный аппарат, патент РФ на изобретение №2455202 от 10.07.2012, заявка №2011102059/11, 21.01.2011, МПК В64F /32, Долганов С.Е., Румянцев Г.А., Плющ С.С., патентообладатель, открытое акционерное общество «Российская самолетостроительная корпорация «Миг»».
3. Устройство для управления подвеской грузов на объект, патент РФ на изобретение №2028967 от 20.02.1995 г. Арепин Ю.И., Щербак В.Н., Соловьев А.В., заявка №49525960 от 21.05.1991, патентообладатель войсковая часть 03444.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВАЯ ИНФОРМАЦИОННАЯ СИСТЕМА РОБОТИЗИРОВАННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2545158C1 |
| БОРТОВАЯ ИНФОРМАЦИОННАЯ СИСТЕМА БЕСПИЛОТНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2536337C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИЗНОСА КАНАЛА СТВОЛА АРТИЛЛЕРИЙСКОГО ОРУЖИЯ | 2012 |
|
RU2494368C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИЗНОСА КАНАЛА СТВОЛА АРТИЛЛЕРИЙСКОГО ОРУЖИЯ | 2012 |
|
RU2498266C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИЗНОСА СТВОЛОВ МНОГОСТВОЛЬНЫХ ПУШЕК АРТИЛЛЕРИЙСКОГО ОРУЖИЯ | 2012 |
|
RU2494369C1 |
| Способ оснащения воздушных судов авиационными средствами поражения | 2022 |
|
RU2808134C1 |
| АВТОМОБИЛЬНАЯ БОРТОВАЯ ИНФОРМАЦИОННАЯ СИСТЕМА | 2012 |
|
RU2496662C1 |
| АВТОМОБИЛЬНАЯ БОРТОВАЯ ИНФОРМАЦИОННАЯ СИСТЕМА | 2012 |
|
RU2487804C1 |
| БОРТОВАЯ ИНФОРМАЦИОННАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2560225C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАБОТЫ АМОРТИЗАТОРА СИЛЫ ОТДАЧИ АРТИЛЛЕРИЙСКОГО ОРУЖИЯ | 2012 |
|
RU2503907C1 |




Изобретение относится к области авиации, в частности к средствам наземного обслуживания авиационной техники. Способ снаряжения летательных аппаратов боеприпасами заключается в загрузке боеприпасов со складов на транспортное средство, доставке боеприпасов транспортным средством к площадке подготовки боеприпасов и осуществлении их выгрузки, обеспечении предварительной подготовки боеприпасов к боевому применению. Специалистами осуществляется загрузка боеприпасов на платформы транспортных роботов, обеспечивающих их параллельную доставку к реперным знакам летательных аппаратов. Осуществляется самонаведение каждого транспортного робота с боеприпасами к стыковочному узлу летательного аппарата и последующая стыковка для снаряжения летательного аппарата боеприпасами. Достигается уменьшение времени и трудозатрат при снаряжении летательных аппаратов боеприпасами. 2 н. и 2 з.п. ф-лы, 8 ил.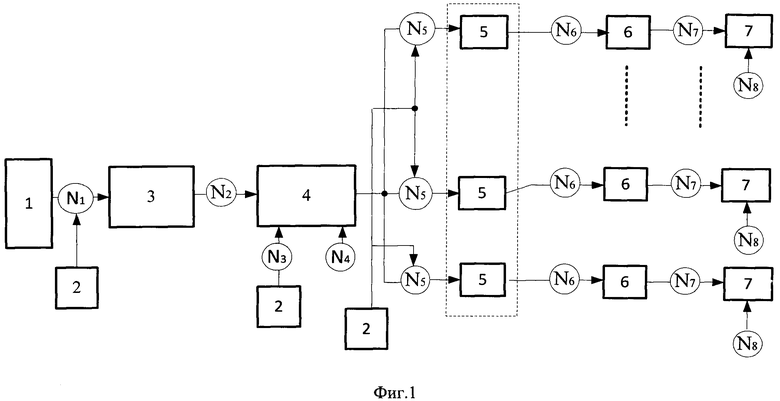
1. Способ снаряжения летательных аппаратов боеприпасами, заключающийся в загрузке боеприпасов со складов на транспортное средство с помощью технических средств для погрузочно-разгрузочных работ, доставке боеприпасов транспортным средством к площадке подготовки боеприпасов и осуществлении их выгрузки, обеспечении предварительной подготовки боеприпасов к боевому применению, отличающийся тем, что специалисты осуществляют загрузку боеприпасов на платформы транспортных роботов, которые обеспечивают одновременную доставку боеприпасов к реперным знакам, расположенным относительно летательных аппаратов на заданном расстоянии, путем приема сигналов инфракрасного излучения, размещенных на реперных знаках, при этом осуществляют перемещение каждого транспортного робота на основе выдачи управляющего сигнала на привод перемещения транспортного робота, блокируют прием сигналов транспортным роботом при достижения реперных знаков, осуществляют самонаведение каждого транспортного робота с боеприпасами к стыковочным узлам летательных аппаратов на основе приема сигналов инфракрасного излучения от передатчиков, размещенных на стыковочных узлах летательных аппаратов и выдачи команд управления на привод перемещения каждого транспортного робота, перемещение каждого транспортного робота с боеприпасами к стыковочным узлам летательных аппаратов осуществляют в пределах секторов излучения первых, вторых и третьих сигналов инфракрасного излучения, при этом сектора излучения имеют разные размеры, обусловленные различными дальностями действия и углами излучения, определяют пространственное положение каждого транспортного робота с боеприпасами путем селекции сигналов инфракрасного излучения, осуществляют управление направлением перемещения каждого транспортного робота с боеприпасами на основе выдачи управляющих сигналов на привод перемещения каждого транспортного робота, при достижении каждым транспортным роботом третьего сектора определяют взаимное положение каждого транспортного робота относительно центральной линии стыковочного узла, на основе измерения двух расстояний относительно центра каждого транспортного робота, в случае равенства расстояний принимается, что транспортный робот и стыковочный узел расположены параллельно относительно друг друга, и осуществляют дальнейшее движения, в случае если расстояния не равны, вычисляют угол отклонения между каждым транспортным роботом с боеприпасами и стыковочным узлом, осуществляют поворот каждого транспортного робота с боеприпасами на двойные углы отклонения, осуществляют движение транспортного робота по прямой назад на расстояние N для совмещения его центра с центральной линией стыковочного узла, при этом расстояние от центра транспортного робота до центральной точки стыковочного узла определяется в соответствии с выражением N=(L1+L2)/2+R, где (L1+L2)/2 - расстояние от центра транспортного робота с боеприпасами до центральной точки стыковочного узла, R - радиус транспортного робота с боеприпасами, осуществляют перемещение каждого транспортного робота с боеприпасами к стыковочному узлу на заданное расстояние от него, и дополнительно, проверяется параллельность каждого транспортного робота с боеприпасами относительно стыковочного узла летательного аппарата, в случае если они параллельны друг другу, то транспортный робот с боеприпасами стыкуется со стыковочным узлом, в случае если стыковка не произошла, то каждый транспортный робот отходит на заданное расстояние и повторно выполняет этап стыковки, в случае успешной стыковки происходит выдача команды «первичная стыковка завершена» с блока сигнализации стыковочного узла на блок управления транспортного робота, который выдает команду на привод платформы для поднятия и перемещения боеприпасов на фиксированные значения, при осуществлении заданных перемещений выдается команда блоком сигнализации «вторичная стыковка произошла», при этом передающее устройство, размещенное на каждом транспортном роботе, передает на диспетчерский пункт информацию о времени, варианте загрузки и номере летательного аппарата, на котором произведена загрузка боеприпасов.
2. Система снаряжения летательных аппаратов боеприпасами содержит технические средства для погрузочно-разгрузочных работ, транспортные средства, отличающаяся тем, что дополнительно введены n-транспортные роботы с платформами для размещения боеприпасов, реперные знаки, которые размещены на заданном расстоянии относительно летательных аппаратов и имеют передающие устройства, блоки сигнализации стыковочных узлов летательных аппаратов.
3. Система снаряжения боеприпасами по п.2, отличающаяся тем, что транспортный робот содержит конструкцию в виде прямоугольника, вписанного в окружность, на котором размещены платформа для размещения боеприпасов, блок управления, привод перемещения транспортного робота, привод перемещения платформы, при этом первый вход блока управления имеет бесконтактную связь с реперным знаком, расположенным на заданном расстоянии относительно летательного аппарата, второй и третий входы имеют бесконтактные связи с первым и вторым выходами блока сигнализации стыковочного узла, первый и второй входы-выходы блока управления обеспечивают бесконтактный обзор заданной области пространства относительно передней полусферы транспортного робота, третий, четвертый и пятый выходы блока управления соединены соответственно с входами привода перемещения транспортным роботом, приводом перемещения платформы и бесконтактной связью с диспетчерским пунктом, блок управления содержит первый, второй и третий приемники, элемент И, элемент НЕ, первый, второй и третий элементы ИЛИ, согласующее устройство, первую и вторую микроЭВМ, первый и второй цифроаналоговый преобразователи, сдвиговой регистр, дифференцирующую цепь, блок селекции, первый и второй датчики расстояний, блок вычисления расстояний и углов, счетчик, первый дешифратор, n вторых дешифраторов, блок памяти, передающее устройство, причем первый, второй и третий входы блока управления являются входами первого, второго и третьего приемников, выход первого приемника соединен с первым входом элемента И, второй вход которого соединен с выходом элемента НЕ, а выход элемента И соединен с первым входом первого элемента ИЛИ, выход второго приемника соединен одновременно с входом элемента НЕ, входом дифференцирующей цепи, а также входом блока селекции и вторым входом первого элемента ИЛИ, выход третьего приемника соединен с первым входом сдвигового регистра, второй вход которого соединен с выходом дифференцирующей цепи, выход которой также соединен со вторым входом счетчика, выход блока селекции соединен со вторыми входами первого и второго датчиков расстояний, первые входы-выходы которых обеспечивают обзор пространства относительно передней полусферы транспортного робота, вторые выходы которых соединены с входами блока вычисления расстояний и углов, выход которого соединен с третьим входом первого элемента ИЛИ, выход которого через согласующее устройство, первую микроЭВМ соединен с входом первого цифроаналогового преобразователя, выходы сдвигового регистра через второй элемент ИЛИ соединены с первым входом счетчика, выход которого соединен с входом первого и входами n вторых дешифраторов, выход первого дешифратора соединен со вторыми входами второй микроЭВМ, первый вход которой соединен с выходом блока памяти, выход второй микроЭВМ соединен с входом второго цифроаналогового преобразователя, выход третьего элемента ИЛИ соединен со входом передающего устройства, выходы первого, второго цифро-аналоговых преобразователей и передающего устройства являются третьими, четверыми и пятыми выходами блока управления.
4. Система снаряжения боеприпасами по п.2, отличающаяся тем, что блок сигнализации стыковочного узла содержит первое и второе передающее устройство, первый микровыключатель, группу вторых микровыключателей, блок логики, задатчик сигналов, элемент ИЛИ, причем первый микровыключатель соединен с одним из входов элемента ИЛИ, группа вторых микровыключателей соединена с первой группой входов блока логики, вторая группа входов которого соединена с выходами задатчика сигналов, выходы блока логики соединены с одними из входов элемента ИЛИ, выход которого соединен с входом второго передающего устройства, выходы первого и второго передающих устройств являются соответственно первым и вторым выходами блока сигнализации стыковочного узла, блок логики состоит из матрицы элементов И, матрицы триггеров, дифференцирующей цепи, причем первые и вторые входы матрицы элементов И соединены с первыми и вторыми входами блока логики, а выходы элементов И соединены с первыми входами триггеров, вторые входы которых соединены с выходом дифференцирующей цепи, вход которой соединен с источником питания, выходы триггеров являются выходами блока логики.
| СПОСОБ ЭКСТРЕННОЙ ДОСТАВКИ НА ИЗОЛИРОВАННЫЙ ОБЪЕКТ ПОЛЕЗНОГО ГРУЗА | 2007 |
|
RU2390468C2 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2364500C2 |
| US 5137193 A, 11.08.1992 | |||

