Изобретение относится к электронным системам транспортных средств и может быть использовано в бортовой информационно-вычислительной системе роботизированного транспортного средства.
Известна автомобильная бортовая информационная система, содержащая электронный блок, состоящий из лицевой панели с окном и нишей, имеющей отверстия для контактных гнезд, и корпуса с цифровым дисплеем, имеющим экран, совместимый с окном лицевой панели, динамиком, печатными платами, а также элементы фиксации электронного блока в панели автомобиля, контактный электрический соединитель, поддерживаемый интерфейс K-Line в соответствии с ISO 9141 и ISO 14230-1, при этом она снабжена клавиатурой с клавишами, имеющими просвечиваемую светодиодами маркировку, световодами, выполняющими функции дополнительной индикации излучаемым светодиодами светом, фотодатчиком и фотоприемником, фоточувствительные части которых размещены на наружной стороне лицевой панели, и печатной платой управления с кнопками, светодиодами, остальными частями фотодатчика и фотоприемника, встроенной на внутренней стороне лицевой панели, а также установленными на корпусе платой инвертора и главной платой с выступающими в передней части контактными гнездами для совмещения с отверстиями ниши на лицевой стороне панели и выступающими в задней части корпуса контактным электрическим соединителем, гнездом для подключения внешней антенны, видеокамерой заднего вида, размещаемой на заднем стекле автомобиля, и поддерживаемыми интерфейсами USB (Host, Slave), USB - OTG, 1 - Ware, CAN 2.0 В. [1] (Ерещенко М.В. Автомобильная бортовая информационная система, патент РФ на изобретение №2268829, МПК B60R 16/02, G06F 1/00, G06F 15/00, опубл. 27.01.2006 г.).
Недостатком данной бортовой информационной системы является ограниченная функциональная возможность, обусловленная тем, что система не осуществляет постоянную запись и надежное хранение изображения вокруг автомобиля.
Известна автомобильная бортовая информационная система, содержащея электронный блок, выходы которого соединены с входами цифрового дисплея и динамика, миниатюрную видеокамеру заднего вида, первую и вторую миниатюрные боковые видеокамеры и миниатюрную видеокамеру переднего вида размещаемых соответственно на заднем, боковых и переднем стеклах автомобиля, коммутатор и блок хранения цифровой информации, который размещен в защищенном корпусе, причем выходы первой и второй миниатюрных боковых видеокамер и миниатюрной видеокамеры переднего вида соединены с соответствующими входами блока хранения цифровой информации, а выход миниатюрной видеокамеры заднего вида соединен с входом коммутатора, первый выход которого соединен с соответствующим входом блока хранения цифровой информации, второй выход - с входом электронного блока, а вход управления соединен с выходом датчика включения заднего хода автомобиля [2] (Винокуров В.И., Григорьева А.В., Зыков В.Н., Зыков А.В. Автомобильная бортовая информационная система, патент РФ на изобретение №2451609, МПК D60R 1/00, опубл. 27.05.2012 г.).
Недостатком данной системы является отсутствие возможности распознавания дорожных знаков. Одной из основных причин дорожно-транспортных происшествий с тяжелыми последствиями является превышение скорости движения.
Наиболее близким к изобретению является автомобильная бортовая информационная система, которая содержит электронный блок, первый и второй выходы которого соединены с входами цифрового дисплея и динамика, миниатюрные видеокамеры заднего вида, первую и вторую боковые, переднего вида размещаемых соответственно на заднем, боковых и переднем стеклах автомобиля, коммутатор и блок хранения цифровой информации, который размещен в защищенном корпусе, выходы миниатюрных видеокамер первой, второй боковой и передней соединены с соответствующими входами блока хранения цифровой информации, выход миниатюрной видеокамеры заднего вида соединен с входом коммутатора, первый и второй выходы которого соединены соответственно с соответствующим входом блока хранения цифровой информации и с первым входом электронного блока, а вход управления соединен с выходом датчика включения заднего хода автомобиля, дополнительно введены блок распознавания знаков и радар, причем выход второй боковой миниатюрной видеокамеры соединен с входом блока распознавания знаков, выход которого соединен со вторым входом электронного блока, третий и четвертый входы которого соединены соответственно с выходом радара и с выходом датчика скорости [3] (Ефанов В.В., Вытришко Ф.М., Гаврилов Н.В. Автомобильная бортовая информационная система, патент РФ №2487804, МПК B60R 16/02, опубл. 20.07.2013 г.).
Недостатками данной системы являются отсутствие режима автоматического соблюдения скоростного диапазона движения в зависимости от информации, размещенной на дорожных знаках, а также режима торможения транспортных средств в соответствии с условиями сближения с преградой.
В качестве преграды можно рассматривать нахождение пешехода или транспортного средства на полосе движения.
Технической задачей изобретения является повышение безопасности движения транспортных средств за счет соблюдения скоростного режима движения и выбора режима торможения.
Технический результат изобретения достигается тем, что в бортовую информационную систему для роботизированного транспортного средства, содержащую электронный блок, миниатюрные видеокамеры заднего вида, первую и вторую боковые, переднего вида, а также коммутатор, блок хранения цифровой информации, блок распознавания знаков и радар, причем миниатюрные видеокамеры заднего вида, первая и вторая боковые, переднего вида размещены соответственно на заднем, боковых и переднем стеклах транспортного средства, коммутатор и блок хранения цифровой информации размещены в защищенном корпусе, выходы миниатюрных видеокамер первой, второй боковой и передней соединены с соответствующими входами блока хранения цифровой информации, выход миниатюрной видеокамеры заднего вида соединен с входом коммутатора, первый и второй выходы которого соединены соответственно с соответствующим входом блока хранения цифровой информации и с первым входом электронного блока, а вход управления соединен с выходом датчика включения заднего хода транспортного средства, выход второй боковой миниатюрной видеокамеры соединен с входом блока распознавания знаков, выход которого соединен со вторым входом электронного блока, третий и четвертый входы которого соединены соответственно с выходом радара и с выходом датчика скорости, дополнительно введены радиолокационный блок определения расстояния, инфракрасный блок определения расстояний, элемент ИЛИ, вычислитель, блок выбора режима торможения, устройство управления скоростью движения, устройство управления тормозной системой, причем выход датчика скорости соединен с входом вычислителя, выход которого соединен со вторым входом блока выбора режима торможения, неконтактные входы радиолокационного и инфракрасного блоков определения расстояний обеспечивают обзор пространства в радиолокационном и инфракрасном диапазонах относительно транспортного средства, выходы данных блоков соединены через элемент ИЛИ с первым входом блока выбора режима торможения, выход которого соединен с входом устройства управления тормозной системой, выход электронного блока соединен с входом устройства управления скоростью движения.
Кроме того, блок выбора режима торможения, состоит из вычитающего устройства, генератора импульсов, первого, второго, n третьих пороговых устройств, первого и второго задатчиков постоянных сигналов, элемента И, элемента НЕ, дифференцирующей цепи, счетчика, делителя, элемента ИЛИ, при этом первый и второй входы блока выбора режима торможения являются соответственно первым и вторым входами вычитающего устройства, выход которого соединен одновременно со вторым входом делителя и первыми входами первого и второго пороговых устройств, вторые входы которых соединены соответственно с первым и вторым выходами первого задатчика, выходы первого и второго пороговых устройств соединены с вторым и третьим входами элемента И, соответственно через элемент НЕ и непосредственно, первый вход элемента И соединен с выходом генератора импульсов, выход элемента И соединен с первым входом счетчика, второй вход, которого соединен с выходом дифференцирующей цепи, вход которой соединен с первым выходом первого задатчика постоянных сигналов, выход счетчика соединен с первым входом делителя, выход которого соединен с первыми входами n третьих пороговых устройств, вторые входы которых соединены с выходами второго задатчика, выходы n третьих пороговых устройств соединены с входами элемента ИЛИ, выход которого является выходом блока выбора режима торможения роботизированного транспортного средства.
На фиг.1 приведена структурная схема бортовой информационной системы роботизированного транспортного средства, где: 1 - электронный блок; 2, 3, 4, 5 - миниатюрные видеокамеры; 6 - коммутатор; 7 - блок хранения цифровой информации, 8 - блок распознавания знаков, 9 - радар, 10 - устройство управления скоростью движения, 11 - радиолокационный блок определения расстояния, 12 - инфракрасный блок определения расстояний, 13 - элемент ИЛИ, 14 - вычислитель, 15 - блок выбора режима торможения, 16 - устройство управления тормозной системой.
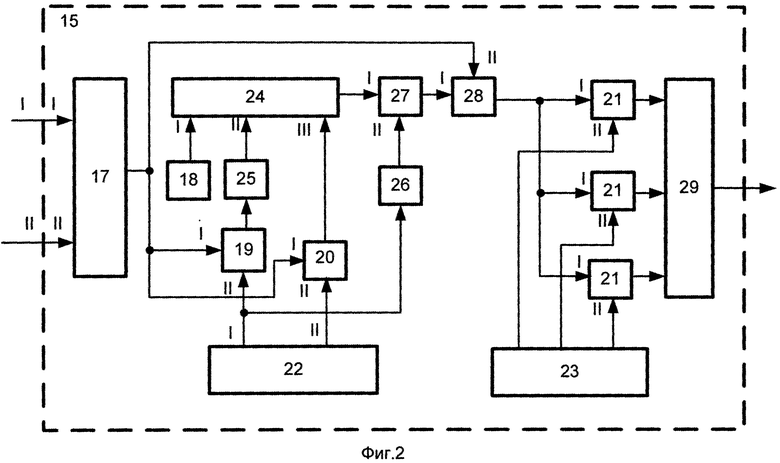
На фиг.2 приведена структурная схема блока 15 выбора режима торможения, где 17 - вычитающее устройство, 18 - генератор импульсов, 19, 20, 21 первое, второе и n-третьи пороговые устройства, 22, 23 - первый и второй задатчики постоянных величин, 24 - элемент И, 25 - элемент НЕ, 26 - дифференцирующая цепь, 27 - счетчик, 28 - делитель, 29 - элемент ИЛИ.
Бортовая информационная система роботизированного транспортного средства содержит электронный блок 1, миниатюрные видеокамеры 2; 3, 4, 5, коммутатор 6; блок 7 хранения цифровой информации, блок 8 распознавания знаков, радар 9, устройство 10 управления скоростью движения, радиолокационный блок 11 определения расстояния, инфракрасный блок 12 определения расстояний, элемент ИЛИ 13, вычислитель 14, блок 15 выбора режима торможения, устройство 16 управления тормозной системой.
Блок 15 выбора режима торможения содержит вычитающее устройство 17, генератор 18 импульсов, первое 19, второе 20 и n-третьи 21 - пороговые устройства, первый 22 и второй 23 задатчики постоянных величин, элемент И 24, элемент НЕ 25, дифференцирующую цепь 26, счетчик 27, делитель 28, элемент ИЛИ 29.
Радиолокационный блок 11 определения расстояния может быть изготовлен на основе известного технического решения, например [4] (Дикарев В.И., Журкович В.В., Сергеева В.Г. Радиолокационное устройство для предотвращения столкновений автомобиля, патент РФ на изобретение №2190238, опубл. 27.09.2002 г.).
Инфракрасный блок 12 определения расстояний, может быть изготовлен на основе известного технического решения [5] (Мужичек С.М., Ефанов В.В., Винокуров В.И., Зыков В.Н. Способ предотвращения столкновений автомобиля и устройство для его осуществления, патент РФ на изобретение №2310922, опубл. 20.11.2007 г.).
Бортовая информационная система роботизированного транспортного средства функционирует следующим образом.
При стоянке или движении транспортного средства в зависимости от появления объектов на заданном расстоянии осуществляется видеозапись изображения вокруг транспортного средства с выходов миниатюрной видеокамеры 2 заднего вида, первой 3 и второй 4 миниатюрных боковых видеокамер, размещенных на боковых стеклах транспортного средства, и миниатюрной видеокамеры 5 переднего вида, размещенной на переднем стекле транспортного средства, в блок 7 хранения цифровой информации, находящийся в защищенном корпусе. При необходимости данная информация может быть извлечена из блока 7 хранения цифровой информации.
При включении задней передачи сигналом с датчика включения задней скорости происходит подключение выхода миниатюрной видеокамеры 2 заднего вида к входу электронного блока 1. При этом изображение с выхода миниатюрной видеокамеры 2 заднего вида отображается на цифровом дисплее электронного блока 1.
Вторая 3 миниатюрная боковая видеокамера, размещенная на ветровом стекле за зеркалом заднего вида, снимает пространство перед транспортным средством в зоне расположения дорожных знаков (справа и сверху по ходу движения) и передает изображение в блок распознавания знаков.
Блок 8 распознавания знаков обеспечивает распознавание формы дорожного знака, распознавание цвета знака, распознавание надписи, распознавание информационной таблички.
Сигнал, соответствующий значению необходимой скорости движения для соответствующего вида транспорта с выхода блока 8 распознавания, поступает на электронный блок 1, который анализирует фактическую скорость движения транспортного средства, осуществляет сравнение скорости транспортного средства с максимально допустимой скоростью и формирует сигнал управления, который поступает на вход устройства 10 управления скоростью движения, с выхода которого поступает на вход исполнительного устройства роботизированного транспортного средства, обеспечивая тем самым соблюдение скоростного режима движения.
Однако в условиях плохой видимости, тумана, задымленной местности и воздействия грязи на дорожные знаки затрудняется съем информации с дорожных знаков. В этом случае дополнительно используется радиолокационный датчик для распознавания дорожных знаков, при этом осуществляют предварительное нанесение пассивных меток на дорожные знаки. Радар 11 осуществляет излучение электромагнитной энергии в направлении дорожных знаков, и прием отраженных сигналов несущих информацию о типе и значении дорожных знаков. В настоящее время имеются пассивные RFID-метки с дальностью действия 18-20 метров.
В процессе движения транспортного средства необходимо с учетом тормозного пути правильно выбрать дистанцию до впереди идущего транспортного средства или исключить наезд на пешеход, при его появлении на полосе движения.
Выбор режима торможения осуществляют в соответствии со следующим алгоритмом:
- Определяют скорость движения транспортного средства V1 в момент t1, соответствующий сигналу «Начало торможения».
- Определяют скорость движения транспортного средства V2 в момент t2=t1+Δt и длину тормозного пути S1 из выражения
 .
.
- Определяют скорость движения транспортного средства Vi в момент ti=t1+Δt (i-1) и длину тормозного пути Si из выражения
 .
.
- Определяют расстояние до впереди идущего транспортного средства и сравнивают текущее значение длины тормозного пути с расстоянием до впереди идущего транспортного средства в виде выражения:
ΔS=Si-SD,
где Si - текущая длина тормозного пути, SD - расстояние до впереди идущего транспортного средства (или пешехода).
- Осуществляют анализ динамики изменения величины сигнала ΔS относительно двух значений опорных сигналов, определяют время сближения до впереди идущего транспортного средства (или пешехода).
- Осуществляют сравнение времени сближения транспортных средств с заданными значениями и формируют сигнал соответствующий режиму торможения исходя из значений величины времени сближения транспортных средств.
Реализация данного алгоритма осуществляется блоком 15 выбора режима торможения роботизированного транспортного средства следующим образом. Сигнал с датчика скорости поступает в вычислитель 14, где осуществляется определение знака ускорения. По отрицательному значению ускорения формируют и запоминают сигнал «Начало торможения».
В вычислителе 14 осуществляется периодическое через время Δt вычисление длины тормозного пути S в соответствии с выражением:
 ,.
,.
Измерение дистанции до впереди идущего транспортного средства (или пешехода) осуществляет радиолокационный блок 11 определения расстояния или инфракрасный блок 12 определения расстояний, сигналы с выходов данных датчиков через элемент ИЛИ 13 поступают на второй вход вычислителя и первый вход блока 15 (фиг.1).
Блок 15 выбора режима торможения обеспечивает формирование сигнала соответствующего одному из режимов торможения исходя из величины безопасной дистанции и динамики сближения транспортных средств.
Сигналы, соответствующие значениям Si - текущей длине тормозного пути, SD расстоянию до впереди идущего транспортного средства (или пешехода) поступают через первый и второй входы блока 15 соответственно на первый и второй входы вычитающего устройства 17, с выхода которого сигнал, соответствующий значению ΔS=Si-SD поступает на первые входы первого 19 и второго 20 пороговых устройств. Величина сигнала ΔS соответствует величине безопасной дистанции до впереди идущего транспортного средства.
Пороговые устройства (19, 20) обеспечивают предварительный анализ динамики сближения транспортных средств, на основе сравнения сигнала ΔS с двумя опорными значениями, которые поступают на вторые входы пороговых устройств соответственно с первого и второго выходов первого 22 задатчика постоянных сигналов.
Это осуществляется следующим образом в момент сближения транспортных средств когда  , сигнал с выхода первого 19 порогового устройства снимается и через элемент НЕ 25 поступает на второй вход элемента И 24, на третий вход которого поступает сигнал с выхода второго 20 порогового устройства, тем самым обеспечивая поступление импульсов с генератора 18 импульсов через первый вход элемента И 24, на первый вход счетчика 27 импульсов (фиг.2).
, сигнал с выхода первого 19 порогового устройства снимается и через элемент НЕ 25 поступает на второй вход элемента И 24, на третий вход которого поступает сигнал с выхода второго 20 порогового устройства, тем самым обеспечивая поступление импульсов с генератора 18 импульсов через первый вход элемента И 24, на первый вход счетчика 27 импульсов (фиг.2).
В момент сближения транспортных средств, когда  , сигнал с выхода второго 20 порогового устройства снимается, обеспечивая тем самым снятие сигнала с третьего входа элемента И 24.
, сигнал с выхода второго 20 порогового устройства снимается, обеспечивая тем самым снятие сигнала с третьего входа элемента И 24.
Таким образом, обеспечивается формирование счетчиком 27 импульсов сигнала, соответствующего динамике (скорости) сближения транспортных средств с преградой.
С выхода счетчика 27 импульсов сигнал, соответствующий скорости сближения поступает на первый вход делителя 28, на второй вход которого поступает сигнал, соответствующий безопасной дистанции до впереди идущего транспортного средства.
С выхода делителя 28, сигнал, соответствующий времени сближения до впереди идущего транспортного средства поступает на первые входы n-третьих 21 пороговых устройств, на вторые входы которых поступают сигналы опорные сигналы с выходов второго 23 задатчика.
С одного выхода или определенной комбинации выходов n-третьих 21 пороговых устройств сигнал поступает, через элемент ИЛИ 29 на вход устройство 16 управления тормозной системы.
Устройство 16 управления тормозной системы выдает сигнал на исполнительное устройство в соответствии с заданным режимом торможения, с целью исключить столкновение транспортных средств (или наезд на пешехода).
Таким образом, обеспечивается повышение безопасности дорожного движения роботизированного транспортного средства за счет соблюдения скоростного режима движения и выбора режима торможения роботизированного транспортного средства.
Источники информации
1. Ерещенко М.В. Автомобильная бортовая информационная система, патент РФ на изобретение №2268829, МПК B60R 16/02, G06F 1/00, G06F 15/00, опубл. 27.01.2006 г.
2. Винокуров В.И., Григорьева А.В., Зыков В.Н., Зыков А.В. Автомобильная бортовая информационная система, патент РФ на изобретение №2451609, МПК D60R 1/00, опубл. 27.05.2012 г.
3. Ефанов В.В., Вытришко Ф.М., Гаврилов Н.В. Автомобильная бортовая информационная система, патент РФ на изобретение №2487804, МПК B60R 16/02, опубл. 20.07.2013 г.
4. Мужичек С.М., Ефанов В.В., Винокуров В.И., Зыков В.Н. Способ предотвращения столкновений автомобиля и устройство для его осуществления, патент РФ на изобретение №2310922 от 20.11.2007 г.
5. Дикарев В.И., Журкович В.В., Сергеева В.Г. Радиолокационное устройство для предотвращения столкновений автомобиля, патент РФ на изобретение №2190238 от 27.09.2002 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВАЯ ИНФОРМАЦИОННАЯ СИСТЕМА БЕСПИЛОТНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2536337C1 |
| БОРТОВАЯ ИНФОРМАЦИОННАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2560225C1 |
| АВТОМОБИЛЬНАЯ БОРТОВАЯ ИНФОРМАЦИОННАЯ СИСТЕМА | 2012 |
|
RU2487804C1 |
| АВТОМОБИЛЬНАЯ БОРТОВАЯ ИНФОРМАЦИОННАЯ СИСТЕМА | 2012 |
|
RU2496662C1 |
| СПОСОБ СНАРЯЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ БОЕПРИПАСАМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2560228C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КОЛЕБАНИЙ ЛОПАТОК ТУРБОМАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2478920C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ГРУППОВОЙ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2484498C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2483320C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИЗНОСА КАНАЛА СТВОЛА АРТИЛЛЕРИЙСКОГО ОРУЖИЯ | 2012 |
|
RU2494368C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИЗНОСА КАНАЛА СТВОЛА АРТИЛЛЕРИЙСКОГО ОРУЖИЯ | 2012 |
|
RU2498266C1 |
Бортовая информационная система роботизированного транспортного средства относится к электронным системам транспортных средств. Система содержит электронный блок, миниатюрные видеокамеры, коммутатор, блок хранения цифровой информации, блок распознавания знаков, радар, радиолокационный и инфракрасный блок определения расстояний, элемент ИЛИ, вычислитель, блок выбора режима торможения, устройство для управления скоростью движения, устройство для управления тормозной системой. Блок выбора режима торможения состоит из вычитающего устройства, генератора импульсов, первого, второго и n третьих пороговых устройств, первого и второго задатчика постоянных сигналов, элементов И, НЕ и ИЛИ, дифференцирующей цепи, счетчика, делителя. Обеспечивается соблюдение скоростного режима для безопасности дорожного движения. 1 з.п. ф-лы, 2 ил.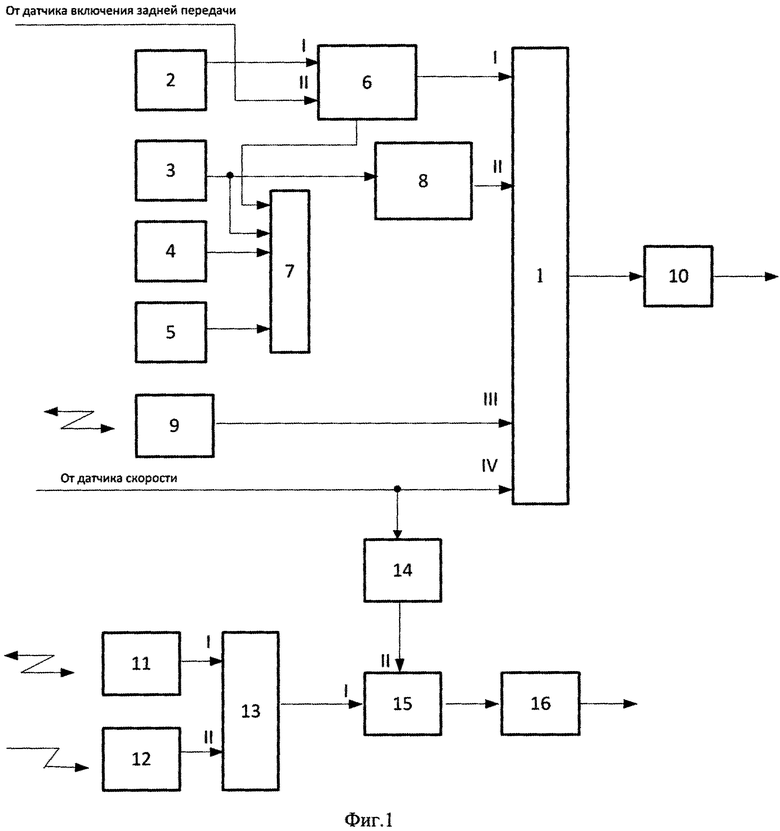
1. Бортовая информационная система роботизированного транспортного средства, содержащая электронный блок, миниатюрные видеокамеры, коммутатор, блок хранения цифровой информации, блок распознавания знаков и радар, причем миниатюрные видеокамеры заднего вида, первая и вторая боковые, переднего вида размещены соответственно на заднем, боковых и переднем стеклах роботизированного транспортного средства, коммутатор и блок хранения цифровой информации размещены в защищенном корпусе, выходы миниатюрных видеокамер первой, второй боковой и передней соединены с соответствующими входами блока хранения цифровой информации, выход миниатюрной видеокамеры заднего вида соединен с входом коммутатора, первый и второй выходы которого соединены соответственно с соответствующим входом блока хранения цифровой информации и с первым входом электронного блока, а вход управления соединен с выходом датчика включения заднего хода роботизированного транспортного средства, выход второй боковой миниатюрной видеокамеры соединен с входом блока распознавания знаков, выход которого соединен со вторым входом электронного блока, третий и четвертый входы которого соединены соответственно с выходом радара и выходом датчика скорости, отличающаяся тем, что дополнительно введены радиолокационный блок определения расстояния, инфракрасный блок определения расстояний, элемент ИЛИ, вычислитель, блок выбора режима торможения, устройство управления скоростью движения, устройство управления тормозной системой, причем выход датчика скорости соединен с входом вычислителя, выход которого соединен со вторым входом блока выбора режима торможения, неконтактные входы радиолокационного и инфракрасного блоков определения расстояний обеспечивают обзор пространства в радиолокационном и инфракрасном диапазонах относительно транспортного средства, выходы данных блоков соединены через элемент ИЛИ с первым входом блока выбора режима торможения, выход которого соединен с входом устройства управления тормозной системой, выход электронного блока соединен с входом устройства управления скоростью движения.
2. Бортовая информационная система роботизированного транспортного средства по п. 1, отличающаяся тем, что блок выбора режима торможения, состоит из вычитающего устройства, генератора импульсов, первого, второго, n третьих пороговых устройств, первого и второго задатчиков постоянных сигналов, элемента И, элемента НЕ, дифференцирующей цепи, счетчика, делителя, элемента ИЛИ, при этом первый и второй входы блока выбора режима торможения являются соответственно первым и вторым входами вычитающего устройства, выход которого соединен одновременно со вторым входом делителя и первыми входами первого и второго пороговых устройств, вторые входы которых соединены соответственно с первым и вторым выходами первого задатчика, выходы первого и второго пороговых устройств соединены с вторым и третьим входами элемента И соответственно через элемент НЕ и непосредственно, первый вход элемента И соединен с выходом генератора импульсов, выход элемента И соединен с первым входом счетчика, второй вход которого соединен с выходом дифференцирующей цепи, вход которой соединен с первым выходом первого задатчика постоянных сигналов, выход счетчика соединен с первым входом делителя, выход которого соединен с первыми входами n третьих пороговых устройств, вторые входы которых соединены с выходами второго задатчика, выходы n третьих пороговых устройств соединены с входами элемента ИЛИ, выход которого является выходом блока выбора режима торможения.
| АВТОМОБИЛЬНАЯ БОРТОВАЯ ИНФОРМАЦИОННАЯ СИСТЕМА | 2012 |
|
RU2487804C1 |
| Действующая модель движения искусственного спутника земли | 1958 |
|
SU116669A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

