Изобретение относится к области вычислительной техники и может быть использовано в системах управления и обработки сигналов.
Известен способ прогнозирования результатов измерений и устройство его реализующее по патенту РФ №2374682, МПК G06F 17/17, опубликовано 27.11.2009.
Устройство по патенту №2374682 содержит блок хранения входной реализации, запоминающий N дискретных временных выборок наблюдаемого входного процесса на фиксированном интервале Т, тактовый генератор, блок управления, блок выделения полезного сигнала, блок хранения пяти последних значений оценки полезной составляющей, блок аппроксимации полиномом первой степени, аппроксимирующий наблюдаемый входной процесс линейной зависимостью с использованием критерия минимума среднеквадратичной ошибки аппроксимации, блок аппроксимации полиномом второй степени, блок хранения выходной реализации. Прогноз осуществляется на временной интервал фиксированной длительности, равной трем интервалам дискретизации.
Известное устройство по технической сущности является наиболее близким к заявляемому техническому решению и выбрано в качестве ближайшего аналога (прототипа).
Недостатками известного устройства являются ограниченные возможности, в частности относительно малый и фиксированный интервал прогноза, никак не связанный с возможным изменением характера наблюдаемого процесса, а также отсутствие защиты от аномальных ошибок прогноза, возникающих при резком изменении величины входного процесса.
Указанные недостатки обусловлены ограниченностью самого предложенного алгоритма прогнозирования, не предусматривающего формирования адаптивного интервала прогноза и не учитывающего величину получаемой ошибки аппроксимации.
Техническим результатом предлагаемого изобретения является повышение эффективности операции прогнозирования за счет увеличения интервала прогноза и исключения аномальных ошибок прогноза.
Указанный технический результат достигается тем, что в устройстве прогнозирования результатов измерений, содержащем блок хранения входной реализации и блок аппроксимации полиномом первой степени, согласно изобретению блок хранения входной реализации выполнен в виде последовательно соединенных N линий задержки, выходы которых, а также вход первой линии задержки соединены с входами блока аппроксимации полиномом первой степени и входами блока оценки среднего уровня сигнала, а вход блока хранения входной реализации соединен с выходом блока нелинейного преобразования, вход которого является входом всего устройства, при этом первый выход блока аппроксимации полиномом первой степени, на котором формируется сигнал, пропорциональный коэффициенту при старшем члене полинома, соединен с входом блока определения периода упреждения, а также с первым входом блока прогноза и первым входом блока анализа, второй выход блока аппроксимации полиномом первой степени, на котором формируется сигнал, пропорциональный свободному члену полинома, соединен со вторым входом блока прогноза, третий выход блока аппроксимации полиномом первой степени, на котором формируется сигнал, пропорциональный среднеквадратичной ошибке аппроксимации, соединен через линейный фильтр со вторым входом блока анализа, выход блока определения периода упреждения соединен с третьим входом блока прогноза, а выход блока прогноза соединен с входом блока обратного преобразования, выход которого соединен с первым входом коммутатора и третьим входом блока анализа, при этом второй вход коммутатора и четвертый вход блока анализа соединены с входом блока нелинейного преобразования, а выход блока оценки среднего уровня сигнала соединен с пятым входом блока анализа, выход которого соединен с управляющим входом коммутатора, выход которого является выходом всего устройства.
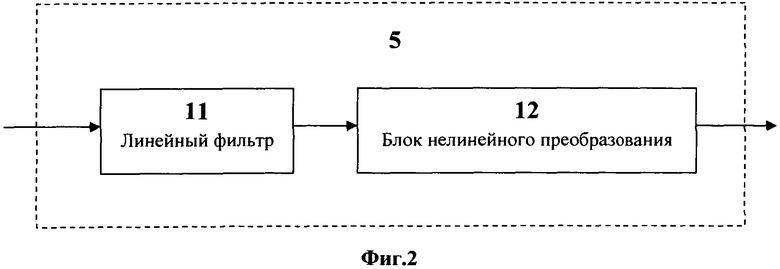
Блок определения периода упреждения содержит последовательно соединенные линейный фильтр и блок нелинейного преобразования, при этом вход линейного фильтра является входом, а выход блока нелинейного преобразования является выходом блока определения периода упреждения.
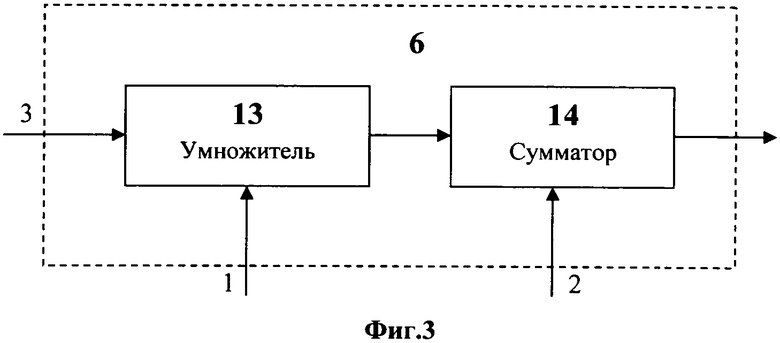
Блок прогноза содержит умножитель и сумматор, при этом выход умножителя соединен с первым входом сумматора, выход которого является выходом блока прогноза, а первый вход умножителя, второй вход умножителя и второй вход сумматора являются соответственно первым, третьим и вторым входами блока прогноза.
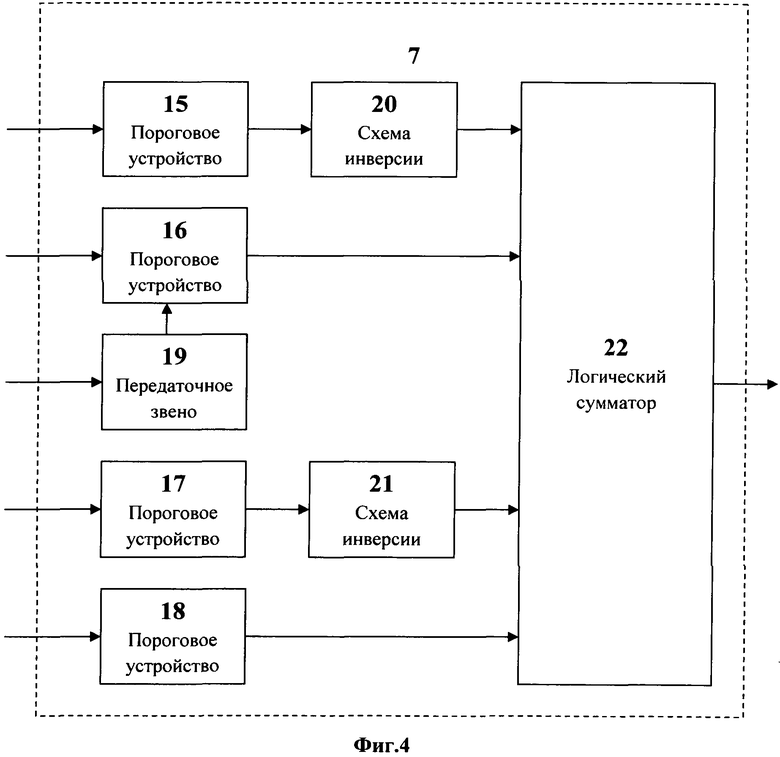
Блок анализа содержит четыре пороговых устройства, входы которых являются входами блока, передаточное звено с регулируемым коэффициентом передачи, вход которого является входом блока, а выход соединен с входом задания порогового уровня второго порогового устройства, а также двух схем инверсии, при этом выходы первого и третьего пороговых устройств соединены соответственно с входами первой и второй схем инверсии, выходы второго и четвертого пороговых устройств, выходы первой и второй схем инверсии соединены с соответствующими входами логического сумматора, выход которого является выходом блока анализа.
Блок оценки среднего уровня сигнала выполнен в виде взвешенного сумматора.
Изобретение, охарактеризованное указанной выше совокупностью существенных признаков, на дату подачи заявки неизвестно в Российской Федерации и за границей и отвечает требованиям критерия "новизна".
Изобретение может быть реализовано промышленным способом с использованием известных технических средств, технологий и материалов и соответствует требованиям критерия "промышленная применимость".
Заявителем не выявлены технические решения, имеющие признаки, совпадающие с совокупностью отличительных признаков предлагаемого устройства и обеспечивающие достижение заявляемого технического результата, в связи с чем можно сделать вывод о соответствии изобретения условию патентоспособности "изобретательский уровень".
Изобретение иллюстрируется графическими материалами, где:
- на фиг. 1 изображена схема устройства;
- на фиг. 2 - схема блока определения периода упреждения;
- на фиг. 3 - схема блока прогноза;
- на фиг. 4 - схема блока анализа;
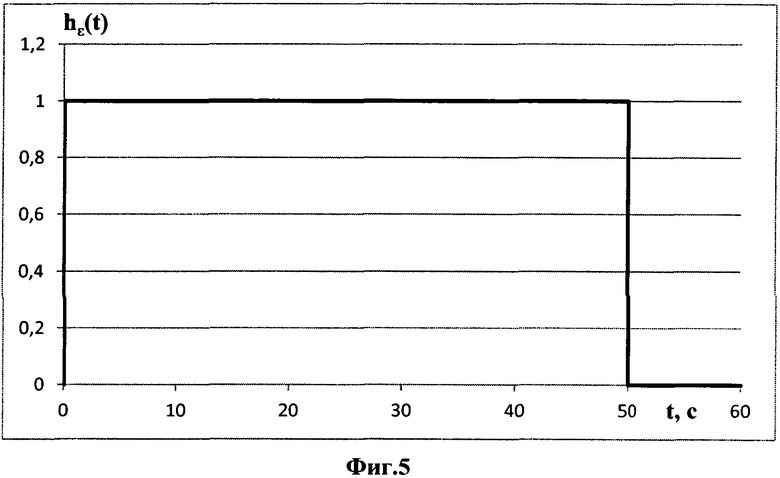
- на фиг. 5 - вид отклика линейного фильтра 8 примера конкретного выполнения устройства;
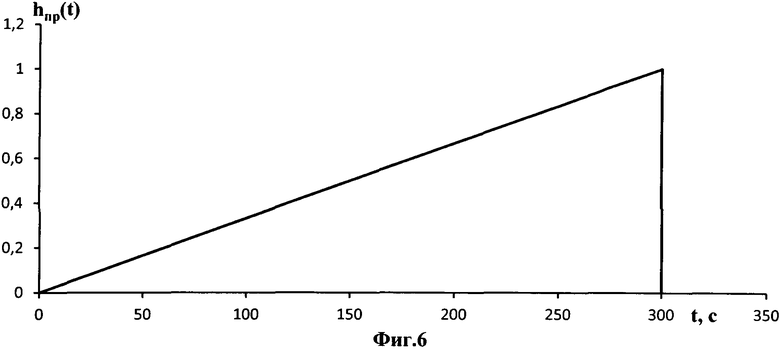
- на фиг. 6 - вид отклика линейного фильтра 11 примера конкретного выполнения устройства;
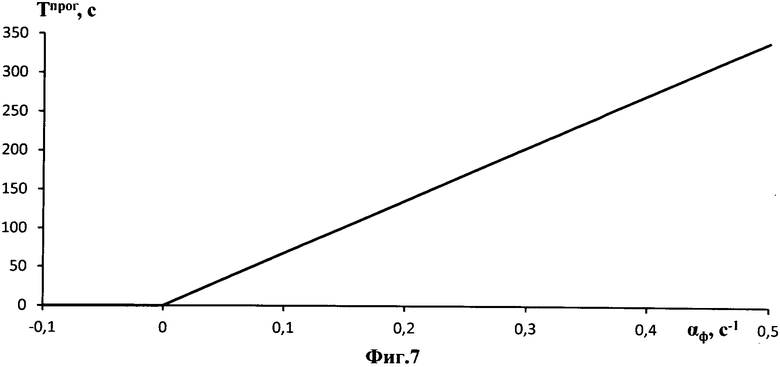
- на фиг. 7 - вид функции преобразования блока 12 примера конкретного выполнения устройства;
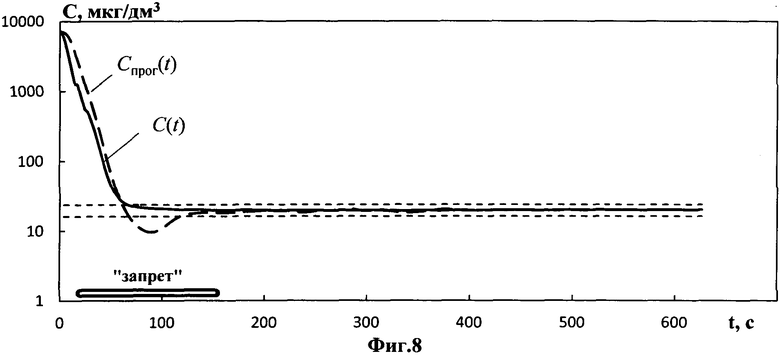
- на фиг. 8 - вид переходных процессов для первого датчика примера конкретного выполнения устройства,
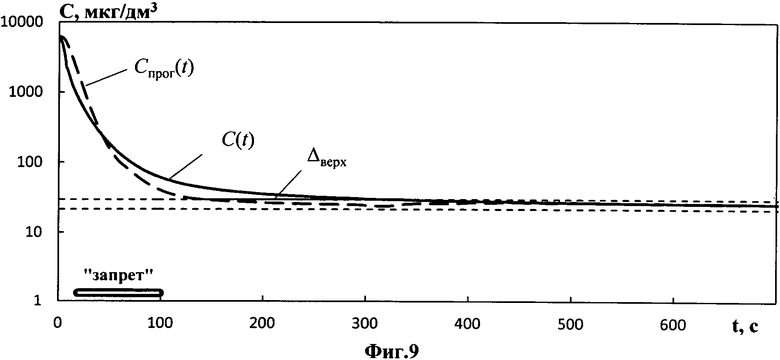
- на фиг. 9 - вид переходных процессов для второго датчика примера конкретного выполнения устройства,
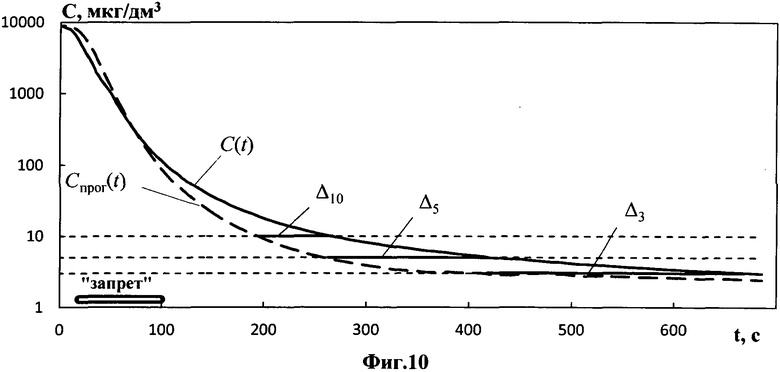
- на фиг. 10 - вид переходных процессов для третьего датчика примера конкретного выполнения устройства,
На чертеже приняты следующие обозначения:
1 - блок хранения входной реализации;
2 - блок аппроксимации полиномом первой степени;
3 - блок оценки среднего уровня сигнала;
4 - блок нелинейного преобразования;
5 - блок определения периода упреждения;
6 - блок прогноза;
7 - блок анализа;
8 - линейный фильтр;
9 - блок обратного преобразования;
10 - коммутатор;
11 - линейный фильтр блока 5;
12 - блок нелинейного преобразования блока 5;
13 - умножитель блока 6;
14 - сумматор блока 6;
15 - первое пороговое устройство блока 7;
16 - второе пороговое устройство блока 7;
17 - третье пороговое устройство блока 7;
18 - четвертое пороговое устройство блока 7;
19 - передаточное звено блока 7;
20 - первая схема инверсии блока 7;
21 - вторая схема инверсии блока 7;
22 - логический сумматор блока 7.
Устройство содержит блок 1 хранения входной реализации и блок 2 аппроксимации полиномом первой степени. Блок 1 хранения входной реализации выполнен в виде последовательно соединенных N линий задержки, выходы которых, а также вход первой линии задержки, соединены с входами блока 2 аппроксимации полиномом первой степени и входами блока 3 оценки среднего уровня сигнала. Вход блока 1 хранения входной реализации соединен с выходом блока 4 нелинейного преобразования, вход которого является входом всего устройства. Первый выход блока 2 аппроксимации полиномом первой степени, на котором формируется сигнал пропорциональный коэффициенту при старшем члене полинома, соединен с входом блока 5 определения периода упреждения, а также с первым входом блока 6 прогноза и первым входом блока 7 анализа. Второй выход блока 2 аппроксимации полиномом первой степени, на котором формируется сигнал, пропорциональный свободному члену полинома, соединен со вторым входом блока 6 прогноза. Третий выход блока 2 аппроксимации полиномом первой степени, на котором формируется сигнал, пропорциональный среднеквадратичной ошибке аппроксимации, соединен через линейный фильтр 8 со вторым входом блока 7 анализа. Выход блока 5 определения периода упреждения соединен с третьим входом блока 6 прогноза. Выход блока 6 прогноза соединен с входом блока 9 обратного преобразования, выход которого соединен с первым входом коммутатора 10 и третьим входом блока 7 анализа. Второй вход коммутатора 10 и четвертый вход блока 7 анализа соединены с входом блока 4 нелинейного преобразования. Выход блока 3 оценки среднего уровня сигнала соединен с пятым входом блока 7 анализа, выход которого соединен с управляющим входом коммутатора 10, выход которого является выходом всего устройства. Блок 5 определения периода упреждения содержит последовательно соединенные линейный фильтр 11 и блок 12 нелинейного преобразования, при этом вход линейного фильтра 11 является входом, а выход блока 12 нелинейного преобразования является выходом блока 5 определения периода упреждения. Блок 6 прогноза содержит умножитель 13 и сумматор 14, при этом выход умножителя 13 соединен с первым входом сумматора 14, выход которого является выходом блока 6 прогноза, а первый вход умножителя 13, второй вход умножителя 13 и второй вход сумматора 14 являются соответственно первым, третьим и вторым входами блока 6 прогноза. Блок 7 анализа состоит из четырех пороговых устройств 15, 16, 17, 18, входы которых являются входами блока 7, передаточного звена 19 с регулируемым коэффициентом передачи, вход которого является входом блока 7, а выход соединен с входом задания порогового уровня порогового устройства 16, а также двух схем 20 и 21 инверсии, при этом выходы пороговых устройств 15 и 17 соединены соответственно с входами схем 20 и 21 инверсии, выходы пороговых устройств 16 и 18, выходы схем 20 и 21 инверсии соединены с соответствующими входами логического сумматора 22, выход которого является выходом блока 7 анализа. Блок 3 оценки среднего уровня сигнала выполнен в виде взвешенного сумматора.
Работа устройства осуществляется следующим образом.
Входной процесс, представленный дискретными временными выборками X(ti), поступает на вход блока 4 нелинейного преобразования, где подвергается безынерционному нелинейному преобразованию. Выходной процесс приобретает вид Y(ti)=F(X(ti)). Функция преобразования F(X) заранее задается такой, чтобы процесс Y(ti) в интересующей области изменения мог быть хорошо аппроксимирован линейной функцией. Выборки процесса Y(ti) поступают в блок 1 хранения входной реализации, выполненный в виде последовательно соединенных N линий задержки, каждая из которых осуществляет задержку на величину τ, равную интервалу дискретизации. Максимальная задержка равна величине T=Nτ, определяет в данном случае интервал анализа. Подобный набор линий задержки представляет собой память на N выборок входного процесса Y(ti), существующих на интервале Т. Очевидно, что при этом сам интервал анализа Т оказывается скользящим по временной оси и его границы задаются моментами t-T и t, где t - текущий момент времени. Общее количество выборок (с учетом текущего значения в момент t, существующего на входе первой линии задержки) будет равно N+1. Данный массив выборок поступает на входы блока 3 оценки среднего уровня сигнала и блока 2 аппроксимации полиномом 1-й степени.
Использование в качестве блока 1 хранения входной реализации набора линий задержек позволяет, в отличие от прототипа, осуществлять непрерывную работу устройства с входными процессами неограниченной длительности.
Аппроксимация полиномом Yапр(ti)=αti+β в блоке 2 производится с использованием известного метода наименьших квадратов, см., например, С.А. Айвазян, B.C. Мхитарян. Прикладная статистика и основы эконометрии. М., «ЮНИТИ», 1998, с. 633.
Коэффициенты аппроксимации α и β рассчитываются по формулам:
 - коэффициент при старшем члене полинома
- коэффициент при старшем члене полинома
 - свободный член полинома,
- свободный член полинома,
где ti - моменты времени, отсчитанные от момента t-T,
Y(ti) - анализируемый процесс,
Одновременно рассчитывается ошибка аппроксимации ε:
Учитывая, что процесс аппроксимации выполняется в блоке 2 непрерывно на скользящем по временной оси интервале длительностью Т, получаемые коэффициенты и ошибка аппроксимации оказываются также функциями времени, представленные своими выборками α(ti), β(ti), ε(ti).
Процесс α(ti), соответствующий коэффициенту полинома при старшем члене, поступает на блок 5 определения периода упреждения (времени прогноза). Данный блок предназначен для адаптивного определения времени прогноза исходя из характера временного изменения процесса α(ti). Он включает в себя последовательно соединенные линейный фильтр 11 и блок 12 нелинейного преобразования. Длительность отклика фильтра 11 может существенно превосходить длительность интервала анализа Т. Блок 12 нелинейного преобразования переводит величину сигнала с выхода фильтра αф(ti) в величину времени прогноза (упреждения) - 
Блок 6 прогноза производит операцию прогнозирования, которая определяется выражением 
Таким образом в предлагаемом устройстве наряду с входным процессом X(ti) формируется процесс Xпрог(ti), представляющий собой текущий прогноз входного процесса с адаптивным временем прогноза.
Использование вновь полученного процесса Хпрог(ti) для определенного класса задач может оказаться более предпочтительным по сравнению с использованием процесса X(ti). Например, при работе в условиях переходного процесса прибора, когда измеряемая величина резко меняет свое значение с большой на относительно малую. В этом случае прогнозируемый процесс, при правильном выборе параметров устройства прогнозирования, может быстрее сходиться к установившемуся значению и таким образом позволит быстрее завершить процесс измерения. Возможны случаи, когда использование процесса Xпрог(ti) не несет каких-либо преимуществ, более того может и ухудшить процесс измерения, внеся в него дополнительные ошибки.
Адаптацию к возможным изменениям процесса X(ti) предназначены выполнять блоки: коммутатор 10, блок анализа 7. На первый и второй сигнальных входа коммутатора 10 подаются соответственно процессы Хпрог(ti) и X(ti). На выход блока 10 проходит только один из процессов (либо Xпрог(ti) либо X(ti)) в зависимости от сигнала, поступающего на управляющий вход коммутатора 10. Данный сигнал поступает с выхода блока 7 анализа.
Входными сигналами блока 7 анализа являются процессы Xпрог(ti), X(ti), α(ti), εф(ti), где εф(ti) - процесс на выходе фильтра 8, а также выходной процесс блока 3 оценки среднего уровня сигнала.
Процессы α(ti), εф(ti), Xпрог(ti), X(ti) поступают на сигнальные входы пороговых устройств 15, 16, 19, 17. Процесс с выхода блока 3 оценки среднего уровня сигнала поступает на вход передаточного звена 19 с регулируемым коэффициентом передачи. Пороговые уровни, с которыми сравниваются Xпрог(ti), X(ti), α(ti) на соответствующих пороговых устройствах, являются фиксированными. Пороговый уровень для εф(ti) формируется на основе оценки среднего уровня сигнала путем выбора соответствующего коэффициента передачи звена с регулируемым коэффициентом передачи. В том случае, если сигналы превзошли пороговые уровни, на выходе порогового устройства формируется логическая единица, в противном случае - ноль. Схемы инверсии 20 и 21 для двух сигналов меняют уровни на противоположные. Логический сумматор 14 объединяет (суммирует) полученные сигналы. Управление коммутатором 10 осуществляется таким образом, что появление на выходе логического сумматора 14 единицы разрешает в коммутаторе 10 прохождение сигнала X(ti) на выход. В противном случае на выход поступает сигнал Xпрог(ti).
Таким образом запрещается прохождение сигнала Xпрог(ti) на выход устройства (запрет прогноза) в следующих случаях: малое значение α(ti), малое значение Xпрог(ti) - эти два случая соответствуют ситуации, когда прогноз малоэффективен, кроме того запрет осуществляется также тогда, когда появляется большая ошибка аппроксимации εф(ti) и когда значение X(ti) больше некоторого заданного значения - в этих случаях возможна большая ошибка прогноза.
Очевидно, что настройка пороговых уровней зависит от конкретной задачи, решение которой преследуется с введением данного прогнозирующего устройства.
Сигнал ошибки аппроксимации εф(ti) формируется на выходе линейного фильтра 8, на вход которого поступает процесс ε(ti) с блока 2 аппроксимации полиномом 1-й степени (см фиг. 1). Фильтр 8 предназначен для того, чтобы сгладить возможные флюктуации процесса ε(ti). Импульсный отклик данного фильтра близок к прямоугольному, а длительность отклика превышает длительность характерного всплеска процесса ε(ti) в 2-3 раза. Запрет прогноза в этом случае будет происходить в области, накрывающую с определенным «запасом» область значительной ошибки ε(ti).
Блок 3 оценки среднего уровня сигнала может представлять собой взвешенный сумматор, осуществляющий суммирование всех поступающих выборок процесса Y(ti) с некоторыми заранее выбранными весовыми коэффициентами ai. Таким образом, он реализует операцию:
где Ycp(ti) - оценка среднего уровня сигнала.
Выбор весовых коэффициентов ai определяет вклад отдельных выборок в общий сигнал. Изменяя соотношения между этими коэффициентами можно подчеркнуть, например, значение выборок, расположенных в той или иной области интервала анализа. В простейшем случае достаточно равновесного суммирования, то есть ai=1.
Предлагаемое устройство может быть реализовано на элементах современной цифровой техники, например, на микропроцессорах MSP430F2618.
Предлагаемое устройство прорабатывалось для переносного анализатора растворенного кислорода, используемого на предприятиях теплоэнергетики. Условия проведения контроля кислорода на типовом предприятии таковы, что при переходе от одной контрольной точки к другой датчик кислородомера оказывается на воздухе, в котором концентрация кислорода (в пересчете на водную среду) составляет порядка 9000 мкг/дм3. В контролируемой среде эта концентрация находится на уровне 10 мкг/дм3. В результате каждое измерение осуществляется в условиях переходного процесса прибора, когда измеряемая величина изменяется почти на три порядка от больших концентраций к малым. Время измерения на одной контрольной точке оказывается весьма значительным - нескольких минут. Общее время, затрачиваемое для проведения полного контроля (по 20-30 точкам), составляет сотни минут. Таким образом, снижение времени измерения является в данном случае весьма актуальным.
Оптимизация отдельных блоков предлагаемого устройства осуществлялось для решение задачи «ускорения» измерений, проводимых в условиях перехода: большие концентрации - малые концентрации.
Из анализа характеристик измерительного процесса были выбраны определенные параметры предлагаемого устройства. В качестве функции нелинейного преобразования использовалась функция F=[lgX(t)](-0,73), интервал анализа Т составил 60 с, интервал дискретизации т=1 с. Таким образом анализировалось в скользящем временном окне длительностью 60 с N+1=61 выборка входного процесса. Вид откликов линейных фильтров показан на: фиг. 5 - отклик hε(t) фильтра 8, включенного между выходом блока 2 аппроксимации полиномом первой степени и вторым входом блока 7 анализа, фиг. 6 - отклик hпр(t) фильтра 11 блока 5 определения периода упреждения. На фиг. 7 показан вид функции преобразования блока 12 нелинейного преобразования блока 5 определения периода упреждения. Взвешенное суммирование всех N+1 выборок анализируемого процесса в блоке 3 оценки среднего уровня сигнала осуществлялось с одинаковыми весовыми коэффициентами, равными единице.
Для оценки эффективности работы устройства были выбраны три датчика, значительно различающиеся по быстродействию. Для этих датчиков исследовался измерительный процесс в условиях перехода от больших измеряемых концентраций к малым. Большие концентрации кислорода соответствовали измерению на воздухе, а малые концентрации для разных датчиков выбирались разные. Для первого датчика - это 20 мкг/дм3, для второго - 25 мкг/дм3, а третьего - нулевые концентрации.
На фиг. 8, фиг. 9, фиг. 10 показан вид экспериментально полученных переходных процессов (сплошная линия) и переходных процессов после применения процедуры прогнозирования (пунктирная линия) соответственно для датчиков первого, второго и третьего. На этих фигурах обозначено: С(t) - экспериментально полученная величина концентрации кислорода, Cпрог(t) - оценка концентрации кислорода, полученная на основе применения алгоритма прогнозирования. В соответствии с изложенным алгоритмом данные процессы Cпрог(t) и C(t) поступают соответственно на первый и второй входы коммутатора 10. В зависимости от команды, поступающей на управляющий вход коммутатора 10, на его выход проходит один из указанных процессов. Сигнал, поступающий на управляющий вход коммутатора 10, на данных фигурах условно представлен линией «запрет» (соответствует логической единице на управляющем входе коммутатора 10). Во временной области, отмеченной данной линией, на выход коммутатора 10 проходит процесс C(t) - то есть запрещено прогнозирование. В моменты времени, не попадающие в эту область, - на выход коммутатора 10 передаются данные Cпрог(t), полученные с учетом прогнозирования.
Кроме того, на графиках фиг. 8 и фиг. 9 пунктирными линиями выделены области, отличающиеся от установившегося значения на величину допустимой погрешности измерения, которая была принята равной ±(0,04C+3) мкг/дм3, где C - установившееся значение. На графике фиг. 10 область допустимой погрешности соответствует концентрациям менее 3 мкг/дм3 (датчик погружен в «нулевой» раствор). На этом же графике дополнительно пунктирами показаны уровни 10 мкг/дм3 и 5 мкг/дм3, которые могут являться пороговыми значениями для некоторых контрольных точек.
Для второго и третьего датчиков (фиг. 9 и 10) процесс Cпрог(t) действительно быстрее стремится к установившемуся состоянию, причем это стремление регулярно. Принимая за длительность переходного процесса время, за которое текущее значение измеряемой величины придет в область, отличающуюся от установившегося значения на величину заданного интервала погрешности прибора, получим, что длительность процесса Спрог(t) меньше, чем исходного процесса C(t). Для датчика 2 разница в длительностях составляет ориентировочно Δверх=160 с (по уровню верхней границы интервала допустимой ошибки). Для датчика 3 разница в длительностях составляет ориентировочно Δ3=300 с (по уровню 3 мкг/дм3). Как видно из фиг. 9 и 10 области, где реализуется выигрыш по сокращению длительности переходного процесса за счет использования прогнозируемых данных, не попадает в зону «запрет». Таким образом, в данных случаях предложенный алгоритм прогнозирования действительно позволяет снизить длительность переходных процессов.
На практике очень часто измерение осуществляется до тех пор, пока наблюдаемая на индикаторе прибора величина не станет меньше заданного порога (так называемый пороговый контроль). Задача получения точной оценки контролируемой величины формально нормами обычно не предусматривается. Поэтому длительность процедуры измерения в этом случае равна длительности достижения показаний прибора порогового уровня.
Предполагая для примера, что по данным третьего датчика осуществляется пороговый контроль по уровням 10 мкг/дм3 или 5 мкг/дм3, получим выигрыш по времени порогового контроля соответственно Δ10=70 с и Δ5=160 с.
Кривая процесса Cпрог(t) «быстрого» первого датчика (фиг. 8) характеризуется провалом ниже установившегося значения в момент времени ориентировочно 95 с. Величина провала превышает уровень допустимой ошибки прибора. Подобный нерегулярный характер поведения переходного процесса является нежелательным для практики. По существу здесь наблюдается аномальная ошибка прогнозирования. Из фиг. 8 видно, что область этой ошибки попадает в зону линии «запрет» и на выход коммутатора 10 (на выход всего устройства) поступает не искаженный провалом процесс C(t). Таким образом, предложенное устройство прогнозирования позволяет исключить подобные аномальные ошибки прогнозирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2008 |
|
RU2374682C2 |
| Устройство для экстраполяции | 1983 |
|
SU1107137A1 |
| Устройство для определения интервалов квадратичной аппроксимации процессов | 1984 |
|
SU1193697A1 |
| АДАПТИВНЫЙ ВРЕМЕННОЙ ДИСКРЕТИЗАТОР | 2015 |
|
RU2583707C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ АППРОКСИМАЦИИ ПРИ ВЫДЕЛЕНИИ ПОЛЕЗНОГО СИГНАЛА В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2013 |
|
RU2541919C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ В РЛС С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 1991 |
|
RU2230337C2 |
| УСТРОЙСТВО ДЛЯ ПРОГНОЗИРОВАНИЯ СОСТОЯНИЯ ДИСКРЕТНОГО КАНАЛА СВЯЗИ | 2014 |
|
RU2543957C1 |
| Устройство для прогнозирования состояния дискретного канала связи | 1989 |
|
SU1658397A2 |
| СПОСОБ И УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ НЕСТАЦИОНАРНОГО ВРЕМЕННОГО РЯДА | 2009 |
|
RU2467383C2 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ АЛГОРИТМА СИГМА-ТОЧЕЧНОГО ФИЛЬТРА КАЛМАНА | 2024 |
|
RU2840100C1 |
Изобретение относится к устройствам прогнозирования результатов измерений. Технический результат заключается в повышении достоверности результатов измерения за счет адаптации времени прогноза. Устройство содержит блок хранения входной реализации, выполненный в виде последовательно соединенных N линий задержки, выходы которых, а также вход первой линии задержки, соединены с входами блока аппроксимации полиномом первой степени и входами блока оценки среднего уровня сигнала. Выход блока аппроксимации полиномом первой степени соединен с входом блока определения периода упреждения, а также с первым входом блока прогноза и первым входом блока анализа. Выход блока прогноза соединен с входом блока обратного преобразования, выход которого соединен с первым входом коммутатора и третьим входом блока анализа, а второй вход коммутатора и четвертый вход блока анализа соединены с входом блока нелинейного преобразования. Выход блока оценки среднего уровня сигнала соединен с пятым входом блока анализа, выход которого соединен с управляющим входом коммутатора. Выход коммутатора является выходом всего устройства. 4 з.п. ф-лы, 10 ил.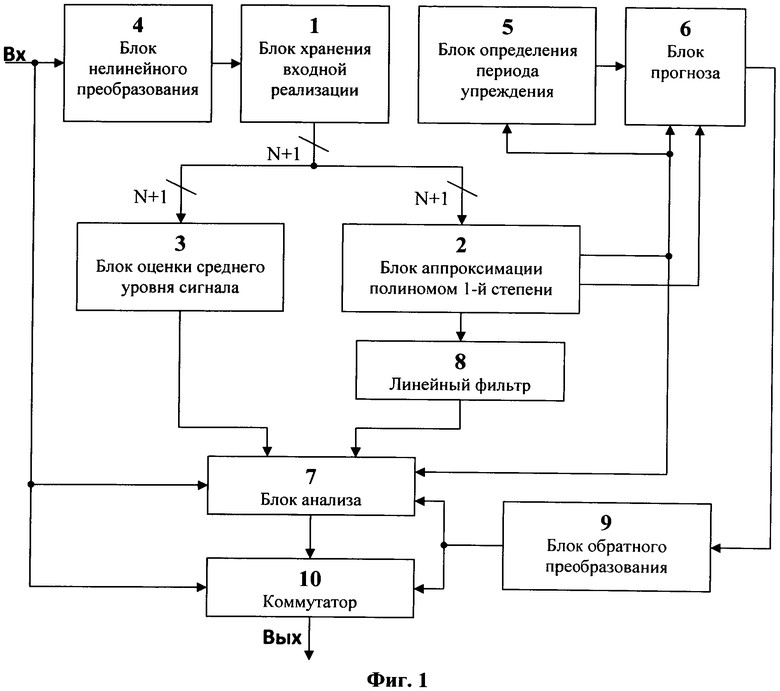
1. Устройство прогнозирования результатов измерений, содержащее блок хранения входной реализации и блок аппроксимации полиномом первой степени, отличающийся тем, что блок хранения входной реализации выполнен в виде последовательно соединенных N линий задержки, выходы которых, а также вход первой линии задержки соединены с входами блока аппроксимации полиномом первой степени и входами блока оценки среднего уровня сигнала, а вход блока хранения входной реализации соединен с выходом блока нелинейного преобразования, вход которого является входом всего устройства, при этом первый выход блока аппроксимации полиномом первой степени, на котором формируется сигнал, пропорциональный коэффициенту при старшем члене полинома, соединен с входом блока определения периода упреждения, а также с первым входом блока прогноза и первым входом блока анализа, второй выход блока аппроксимации полиномом первой степени, на котором формируется сигнал, пропорциональный свободному члену полинома, соединен со вторым входом блока прогноза, третий выход блока аппроксимации полиномом первой степени, на котором формируется сигнал, пропорциональный среднеквадратичной ошибке аппроксимации, соединен через линейный фильтр со вторым входом блока анализа, выход блока определения периода упреждения соединен с третьим входом блока прогноза, а выход блока прогноза соединен с входом блока обратного преобразования, выход которого соединен с первым входом коммутатора и третьим входом блока анализа, при этом второй вход коммутатора и четвертый вход блока анализа соединены с входом блока нелинейного преобразования, а выход блока оценки среднего уровня сигнала соединен с пятым входом блока анализа, выход которого соединен с управляющим входом коммутатора, выход которого является выходом всего устройства.
2. Устройство по п. 1, отличающееся тем, что блок определения периода упреждения содержит последовательно соединенные линейный фильтр и блок нелинейного преобразования, при этом вход линейного фильтра является входом, а выход блока нелинейного преобразования является выходом блока определения периода упреждения.
3. Устройство по п. 1, отличающееся тем, что блок прогноза содержит умножитель и сумматор, при этом выход умножителя соединен с первым входом сумматора, выход которого является выходом блока прогноза, а первый вход умножителя, второй вход умножителя и второй вход сумматора являются соответственно первым, третьим и вторым входами блока прогноза.
4. Устройство по п. 1, отличающееся тем, что блок анализа состоит из четырех пороговых устройств, входы которых являются входами блока, передаточного звена с регулируемым коэффициентом передачи, вход которого является входом блока, а выход соединен с входом задания порогового уровня второго порогового устройства, а также двух схем инверсии, при этом выходы первого и третьего пороговых устройств соединены соответственно с входами первой и второй схем инверсии, выходы второго и четвертого пороговых устройств, выходы первой и второй схем инверсии соединены с соответствующими входами логического сумматора, выход которого является выходом блока анализа.
5. Устройство по п. 1, отличающееся тем, что блок оценки среднего уровня сигнала выполнен в виде взвешенного сумматора.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US 7433743 B2, 07.10.2008 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| US 6229308 B1, 08.05.2001. | |||

