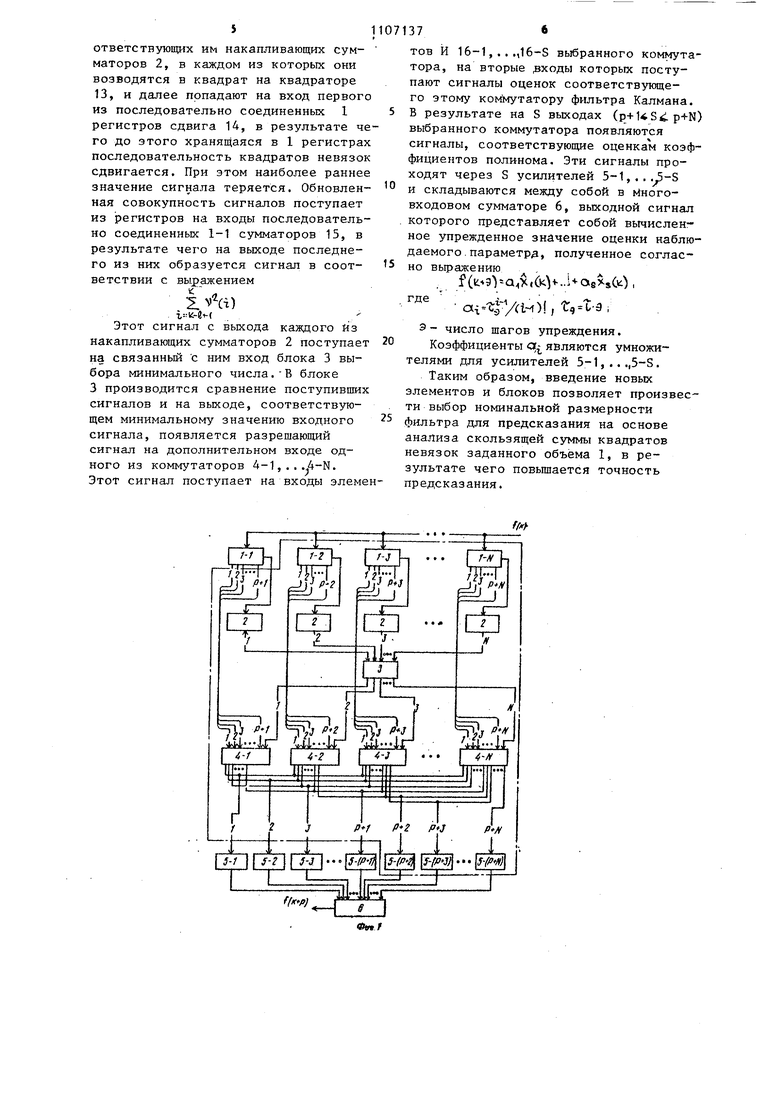
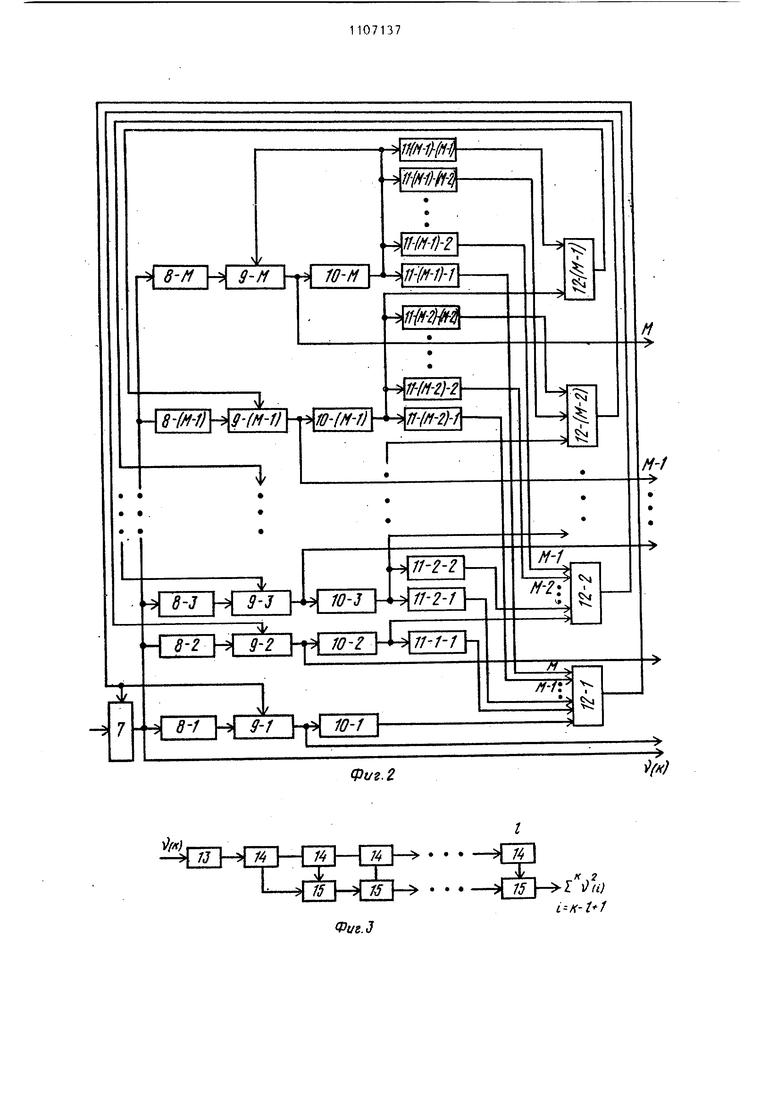
САЭ 1 Изобретение относится к вычислительной технике и может быть исполь зовано в радиотехнических системах навигации летательных аппаратов для предсказания их траекторных парамет ров движения на участках маневра или Б случае структурной неопределенности модели движения наблюдаемого объекта, когда применяется полиномиальная аппроксимация измеряемых навигационных параметров на участках, длительность которых соизмерима с временем переходного процесса обрабатывающего рекуррентного фильтра Известны устройства для экстраполяции, содержащие умножители, сумматоры, элементы задержки СП. Недостаток таких устройств - низкая точность. Наиболее близким по технической сущности к предлагаемому является дискретньй предсказывающий фильтр Калмана, содержащий рекуррентный сглаживающий фильтр Калмана с заданг ной размерностью вектора расстояния соответствующее этой размерности количество усилителей и многовходовый сумматор, причем каждый выход сглаживающего фильтра Калмана соединен с входом соответствующего ему усилителя, а выход каждого ус1|пителя соединен с одним из входов многовходового сумматора, выход которого является информационным выходом устройства U2. Основной особенностью его использования является соответствие номинальной размерности вектора состоя ния степени полинома, аппроксимирующего входное воздействие. Б случае нарушения этого соответствия точност прогноза, полученного на основе апри орно заданной размерности вектора состояния фильтра, существенно отличается от оптимальной. На практике обычно априорно извес тен лишь диапазон возможных степеней аппроксимирующего полинома всей сово купности реализаций входного воздействия. Кроме того, если длительность наблюдаемого участка реализации, совокупность измерений на котором используется для построения пред сказания, соизмерима со временем переходного процесса в применяемом фильтре, степень прогнозирующего полинома, соответствующего минимальной ошибке предсказания, обычно мень 372 ше номинального значения для всей реализации входнрго воздействия. Поэтому при применении известного предсказывающего фильтра открытым остается вопрос об оптимальном выборе размерности прогнозирующего устройства в процессе обработки измерений. Цель изобретения - повьшение точности экстраполяции путем рационального выбора размерности прогнозирующего фильтра в ходе обработки измерений. Для достижение поставленной цели в устройство для экстраполяции, содержащее фильтр Калмана (р+1)-го порядка, информационный вход которого является информационным входом устройства, р+1 усилителей, причем выход i-ro (,p+1) усилителя соединен с i-м входом сумматора, выход которого является информационным выходом фильтра, введены N-1 фильтров Калмана j-ro (,p+N) порядка, N накапливающих сумматоров, блок выбора минимального числа, N коммутаторов и N-1 усилителей,причем j-й (, i.) информационный выход i-ro (,N) фильтра Калмана соединен с j-м информационным входом i-ro коммутатора, к-й(,р+1) информационный выход которого объединен с к-м информационным выходом га-го (,N) коммутатора и подключен к входу к-го усилителя, ()-й информационный выход i-ro (,N) фильтра Калмана соединен с входом i-ro накапливающего сумматора, выход которого подключен к i-му входу блока выбора минимального числа, i-й выход которого подключен к управляющему входу 1-го коммутатора. На фиг.1 представлена структурная схема устройства для экстраполяции; на фиг.2 - структурная схема фильтра Калмана размерности М; на фиг.З структурная схема накапливающего сумматора (блока вычисления суммы квадратов невязок)J на фиг.4 - структурная схема коммутатора с числом S основных входов и выходов, на фиг.5зависимости срёднеквадратических ошибок сглаживания для трех значений размерности вектора состояния фильтра. Устройство (фиг.1) содержит N фильтров Калмана 1-1,..,1-К, различающихся между собой размерностями 3 векторов состояния соответственно от р+1 до P+N, N накапливающих сумматоров (блоков вычисления суммы квадратов невязок) 2, блок 3 выбора минимального числа, N коммутаторов 4-1,.../i-N, .усилителей 5-1, .. ,(P+N), сумматор 6 с числом входов Р+М. Фильтр Калмана (фиг.2) порядка М (,P+N) содержит вычитатель 7, первую группу усилителей 8-1,... 8-м, первую группу сумматоров 9-1,.,. 9-м, rjjynny элементов задержки 10-1 10-М,М-1 группу усилителей по m( , М-1) усилителей в каждой ,11-2-1 11-2-2, ...,11-(м-1)-1, ....II-CM-D(М-1), вторую группу (многовходовых) сумматоров 12-1,.. .,12-М. Накапливающий сумматор 2(фйг.З) содержит квадратор 13, 1 регистров сдвига 14 и (1-1) сумматоров 15. Коммутатор 4-S(,N)(фиг.4) содержит S элементов И 16-1,.. .,16-S, Устройство работает следующим образом. Сигнал, соответствую ций входному воздействию f(k) в дискретные момент времени с периодом , поступает на входы фильтров Калмана 1-1, . . .,1-N. Поступивший на вход каждого из этих фильтров .порядка, например, М (р+КМ4р--М) сигнал попадает на первый вход вычитателя 7, на второй вхо которого поступает сигнал, соответст вующий экстраполированному значению оценки (к) с предьщущего шага обработки, в результате чего на выходе вычитателя 7 формируется сигнал невязки . „, л ()-X,9«). Этот сигнал проходит на дополни-, тельный выход данного фильтра Калмана и на входы первой группы усилителей 8-1,...-М, где умножается на коэффициенты В,... .,Bf соответствен Выходные значения сигналов попадают на первые входы сумматоров 9-1,...|9 первой группы, на вторые входы кото рык поступают сигналы экстраполиро ванных значений из обратной связи (к),.. .,х„э (к) соответственно. 06 оазованный сигнал каждой i-й суммы разсванныи сигнал каждой Ч{О ,э(к)6г-Хг(:) поступает на соответствующий i-й выход основных вькодов данного филь ра Калмана и соответствугаций i-й эл мент задержки 10-i. Задержанные с предыдущего шага значения сигнала 374 х(к-1) для каждого ,...М поступают на входы второй группы усилителей 11-(i-1)-1,....11-(L-l)-(i-1) данного фильтра Калмана (при сигнал X(K-I) поступает прямо на первьш вход многовходового сумматора 12-1 и первый вход i.-ro многовходового сумматора 12-i), втором группы сумматоров (при сигнал х(к-1) вместо подключения к входу отсутствующего сумматора 12-М второй г.руппы используется в качестве сигнала обратной связи для второго входа сумматора 9-м) таким образом, что длякаждогр i сигнал задержанного значения подается на различное коли- чество усилителей второй группы от их полного отсутствия при одного 11-1-1 при , до (М-1)-го: 11-(М-1)-1, ..., 11-(М-1)-,(М-1) при . На второй группе усилителей данного фильтра Калмана значения сигналов умножаются на коэффициенты, вычисляющиеся согласно выражению (v3-0 для каждого 11-(i-1)-j-ro усилителя. Полученные с выходов второй группы усилителей сигналы комбинируются на входах второй группы многовходовых сумматоров 12-1, . . .,12-М-1 таким образом, что сигнал с каждого 11(i-l)-j-ro усилителя попадает на один из входов (12-j)-ro многовходового сумматора вторбй группы. Выходные сигналы каждого 12-1,..., 12-(М-1)-го многовходового сумматора, значения которых адекватны экстраполированным параметрам (к). (к) соответственно, подаются на вторые входы соответствуквдих им сумматоров 9-1, . . .9-(М-1) первой группы. В результате на основных выходах 1,2,...-х данного фильтра Калмана размерностью М образуются сигналы оценок составляющих вектора состояния X Дк) , . . . ,х(к) в соответст,вии со следующими выражениями: Хл6сУ-(:Т(Ьх,э(к))&ч-),эС. i(.-(i( ,9(vcV 5.((eH)t-.. VM(M)(, ) -MU--lV Поступившие с дополнительных вько дов фильтров Калмана сигналы о значениях невязок попадают на входы соответетвующих им накапливающих сумматоров 2, в каждом из которых они возводятся в квадрат на квадраторе 13, и далее попадают на вход первого из последовательно соединенных 1 регистров сдвига 14, в результате че го до этого хранящаяся в 1 регистрах последовательность квадратов невязок сдвигается. При этом наиболее раннее значение сигнала теряется. Обновленмая совокупность сигналов поступает из регистров на входы последовательно соединенных 1-1 сумматоров 15, в результате чего на выходе последнего из них образуется сигнал в соотве тс т ВИИ с вы.ражением iv(i) Этот сигнал с выхода каждого из накапливающих сумматоров 2 поступает на связанньй с ним вход блока 3 выбора минимального числа.В блоке 3 производится сравнение поступивших сигналов и на выходе, соответствующем минимальному значению входного сигнала, появляется разрешающий сигнал на дополнительном входе одного из коммутаторов 4-1,...A-N. Этот сигнал поступает на входы элеме тов и 16-1, . . .,16-S выбранного коммутатора, на вторые эходы которых поступают сигналы оценок соответствующего этому ко№1утатору фильтра Калмана. В результате на S выходах () выбранного коммутатора появляются сигналы, соответствующие оценкам коэффициентов полинома. Эти сигналы проходят через S усилителей 5-1,...5-S и складываются между собой в Многовходовом сумматоре 6, выходной сигнал которого представляет собой вычисленное упрежденное значение оценки наблюдаемого, параметру, полученное согласно выражению f ( .() , ), t,t-9i э- число шагов упреждения. Коэффициенты Qf являются умножителями для усилителей 5-1,...,5-S. Таким образом, введение новых элементов и блоков позволяет произвести выбор номинальной размерности фильтра для предсказания на основе анализа скользящей суммы квадратов невязок заданного объёма 1, в результате чего повышается точность предсказания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для решения интегральных уравнений Фредгольма второго порядка | 1985 |
|
SU1295413A1 |
| Устройство для контроля объектов | 1990 |
|
SU1725233A1 |
| Устройство для определения @ начальных моментов случайного процесса | 1985 |
|
SU1273948A1 |
| Устройство для воспроизведения спектра широкополосной вибрации | 1987 |
|
SU1522178A1 |
| Цифровой генератор базисных функций | 1980 |
|
SU968796A1 |
| Устройство для извлечения квадратного корня с перестраиваемым основанием системы счисления | 1985 |
|
SU1363204A1 |
| Процессор аппроксимационной обработки информации | 1988 |
|
SU1501089A1 |
| Способ многопризнакого распознавания в многофункциональной радиолокационной станции класса летательного аппарата по принципу "самолет с турбореактивным двигателем - самолет с турбовинтовым двигателем - вертолет - ракета - беспилотный летательный аппарат" на основе совместного применения калмановской фильтрации и нейронной сети | 2024 |
|
RU2832712C1 |
| Устройство для контроля радиоэлектронных объектов | 1990 |
|
SU1714622A1 |
| Устройство для цифровой фильтрации | 1988 |
|
SU1596347A1 |
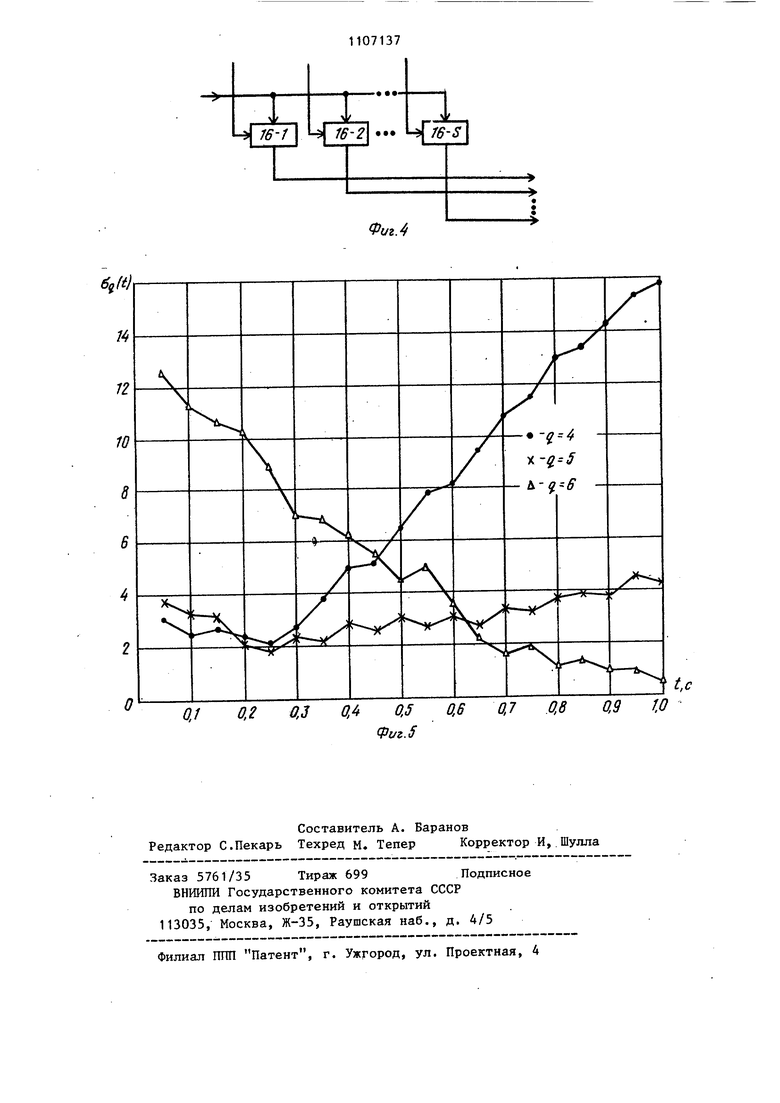
УСТРОЙСТВО ДЛЯ ЭКСТРАПОЛЯЦИИ, содержащее фильтр Калмана (р+1)-го порядка, информационный вход которого является информационным входом устройства,.р+1 усилителей, причем выход -i-ro (, р+П) усилителя соединен с i-M входом сумматора, выход которого является информационным выходом фильтра, отличающееся тем, что, с целью повышения точности, в него введены N-1 фильтров Калмана j-ro порядка (,p+N) порядка, N накапливающих сумматоров, блок выбора минимального числа, N коммутаторов и N-1 усилителей, причем j-й (, i+p ) информационньш выход i-ro (, N) фильтра Калмана соединен с j-м информационным входом 1-го коммутатора, (, P+I) информационный выход которого объединен с к-|;м информа1 1онным выходом m-ro(,N) коммутатора и подключен к входу к-го усилителя, 
fl Pfj
а .
L-H-l 1
Ч 6-2
16-1
16S
Фиг.4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Применение цифровой обработки сигналов | |||
| Под ред | |||
| А.В.Оппенгейма | |||
| М., Мир, 1982, 2 | |||
| Кузьмин З.С | |||
| Основы теории цифровой обработки радиолокационной информации | |||
| М., Советское радио , 1974, с.230 (прототип). | |||
