Настоящее изобретение относится к системам трансмиссии для автотранспортных средств и, в частности, к области управления системами трансмиссии автотранспортных средств с четырьмя ведущими колесами.
Транспортные средства с четырьмя ведущими колесами отличаются повышенным расходом топлива и плохими характеристиками езды на шоссе. В течение последних нескольких лет новые транспортные средства с полным приводом смогли улучшить свои характеристики. Эти транспортные средства характеризуются передачей переменного крутящего момента между передним ведущим мостом и задним ведущим мостом. Точный контроль этого типа трансмиссии позволяет совместить характеристики движения и безопасности как на шоссе, так и по бездорожью.
В частности, в этих транспортных средствах используют систему распределения продольных усилий на четыре колеса, основанную, например, на применении муфты. Такая система характеризуется максимальной мощностью передачи крутящего момента на задний мост и имеет три разных режима работы.
Первый режим трансмиссии соответствует передаче переменной части максимальной мощности крутящего момента на задний мост и соответствует так называемой «управляемой» муфте. Ее используют в автоматическом режиме работы с четырьмя ведущими колесами, называемом «режим 4×4 автоматический».
Второй режим трансмиссии соответствует передаче всей максимальной мощности крутящего момента на задний мост и соответствует так называемой «замкнутой» муфте. Ее используют во внедорожном режиме работы с четырьмя ведущими колесами, называемом «режим 4×4 внедорожный».
Наконец, третий режим соответствует отсутствию передачи крутящего момента на задний мост и соответствует так называемой «разомкнутой» муфте. Ее используют в режиме работы с двумя ведущими колесами, называемом «режим 4×2».
Автотранспортное средство с четырьмя ведущими колесами содержит средства выбора, приводимые в действие пользователем для выбора режима работы системы между тремя режимами «4×2», «4×4 автоматический» или «4×4 внедорожный».
Часто при движении транспортного средства во внедорожном режиме возникает затруднение в выборе степени нажатия на педаль акселератора относительно условия вождения (склон, сцепление с дорогой или грунтом, нагрузка). В этом случае передний мост транспортного средства с передним приводом начинает буксовать. Управляемая система с четырьмя ведущими колесами реагирует посредством соединения заднего моста с передним мостом, чтобы уменьшить разность скорости между двумя мостами. Если крутящий момент, задаваемый водителем, является слишком большим по отношению к моменту, который может пройти через устройство 4×4, передний мост продолжает буксовать по отношению к заднему мосту. В этом случае значительно снижается моторика транспортного средства. Кроме того, устройство 4×4 все больше нагревается вплоть до своего полного размыкания, отключая, таким образом, передачу крутящего момента на задний мост. В этом случае транспортное средство начинает работать в режиме 4×2 вместо задаваемого режима 4×4.
Настоящее изобретение призвано устранить эти недостатки и предложить надежное, максимально прозрачное для водителя, быстрое и эффективное устройство ограничения крутящего момента.
В частности, настоящее изобретение призвано предложить систему и способ управления приводом передачи крутящего момента, выполненные с возможностью учета ситуации вождения и состояния системы 4×4 для ограничения крутящего момента транспортного средства, чтобы максимально увеличить возможности преодоления препятствий и моторику транспортного средства, оборудованного системой 4×4, и возможность использования управляемой системы 4×4, в частности, для неопытных водителей.
В связи с этим первым объектом изобретения является система ограничения крутящего момента автотранспортного средства с системой привода с четырьмя ведущими колесами, содержащая управляемый привод, выполненный с возможностью распределения крутящего момента на ведущие колеса, вычислительные средства для вычисления по меньшей мере одной характеристической переменной работы транспортного средства и модуль ограничения крутящего момента в зависимости от указанных переменных.
Согласно общему отличительному признаку этой системы, модуль ограничения крутящего момента содержит средства выработки заданного значения ограничения крутящего момента, предназначенного для привода, и средства деактивации модуля ограничения крутящего момента в зависимости от характеристических переменных работы двигателя.
Предпочтительно входные сигналы модуля ограничения крутящего момента, предназначенные для выработки заданного значения и для активации или деактивации ограничения крутящего момента, характеризуют ситуацию вождения, с одной стороны, и состояние работы системы с четырьмя ведущими колесами транспортного средства, с другой стороны. Ситуация вождения может характеризоваться крутящим моментом, задаваемым водителем, скоростью транспортного средства, режимом двигателя, включенным передаточным отношением или разностью скорости между передним мостом и задним мостом.
Состояние системы 4×4 может характеризоваться режимом работы системы 4×4, заданным значением передаваемого крутящего момента или температурой привода 4×4. Ограничение крутящего момента возможно только в режиме с четырьмя ведущими колесами, при этом необходима специальная параметризация, чтобы оно было возможным в режиме с двумя ведущими колесами.
Предпочтительно система ограничения крутящего момента постепенно осуществляет возврат водителю возможность контроля, благодаря механизму, ограничивающему изменения крутящего момента во времени. Этот механизм ограничения изменений крутящего момента во времени может зависеть от температуры привода. При низкой температуре приоритет отдается комфорту и возможности преодоления препятствий, а при высокой температуре - обеспечению прочности и возможности применения привода.
Средства обработки входных сигналов выполнены с возможностью фильтрации входных сигналов для получения фильтрованных сигналов типа булевых и для определения, в частности, включенного передаточного отношения коробки передач, предназначенных для средств выработки заданного значения. В частности, применяют фильтры нижних частот первого порядка для устранения любого высокочастотного шума переменных, таких как скорость заднего моста, скорость вращения двигателя, скорость транспортного средства или крутящий момент, задаваемый водителем. Кроме того, для оценки включенной передачи коробки передач можно использовать фильтрованную скорость заднего моста и фильтрованную скорость вращения двигателя.
Предпочтительно средства деактивации выполнены с возможностью выдачи первого сигнала деактивации с целью немедленной деактивации модуля ограничения крутящего момента и второго сигнала деактивации с целью постепенной деактивации модуля ограничения крутящего момента. Для улучшения восприятия водителем можно, в зависимости от серьезности неисправности, предусмотреть немедленную или постепенную деактивацию модуля ограничения крутящего момента. Естественно, в случае отсутствия какой-либо неисправности модуль активирован. Ограничение крутящего момента деактивируют, например, постепенно при слишком низких значениях режима двигателя или, например, когда скорость транспортного средства превышает определенное пороговое значение.
Предпочтительно средство выработки заданного значения содержит модуль обнаружения условий ограничения, выполненный с возможностью выдачи сигналов контроля активации или деактивации модулей ограничения, и модуль генерирования заданного значения, выполненный с возможностью выработки сигнала заданного значения крутящего момента.
Например, модуль обнаружения условий ограничения выполнен с возможностью выдачи сигналов контроля в зависимости от значения характеристических переменных работы транспортного средства и сигналов активации и деактивации.
Вторым объектом изобретения является также способ ограничения крутящего момента автотранспортного средства с системой привода с четырьмя ведущими колесами, содержащей управляемый привод, конфигурируемый с возможностью распределения крутящего момента на ведущие колеса, в котором вычисляют по меньшей мере одну характеристическую переменную работы транспортного средства и ограничивают крутящий момент в зависимости от указанных переменных.
В предпочтительном варианте выполнения заданное значение крутящего момента вырабатывают в зависимости от первых характеристических переменных работы транспортного средства и от переменных, отображающих состояние работы системы привода, и модуль ограничения крутящего момента деактивируют в зависимости от вторых характеристических переменных работы двигателя.
В предпочтительном варианте выполнения производят немедленную деактивацию или постепенную деактивацию ограничения крутящего момента.
Можно предусмотреть постепенное ограничение изменений крутящего момента в течение времени в зависимости от температуры привода.
Согласно другому предпочтительному варианту выполнения можно также обрабатывать входные сигналы для определения включенного передаточного отношения коробки передач с целью выработки заданного значения.
Изобретение поясняется чертежами, на которых представлено следующее:
фиг. 1 - электронная система управления в соответствии с изобретением;
фиг. 2 - средство управления приводом в соответствии с изобретением;
фиг. 3 - вариант выполнения модуля активации/деактивации средства управления приводом в соответствии с изобретением;
фиг. 4 - вариант выполнения модуля фильтрации средства управления приводом в соответствии с изобретением;
фиг. 5 - вариант определения включенной передачи коробки передач в соответствии с изобретением;
фиг.6 - вариант определения заданного значения ограничения крутящего момента в соответствии с изобретением;
фиг.7 - вариант способа определения состояния модуля определения заданного значения в соответствии с изобретением;
фиг.8 - возможный вариант реализации заданного значения ограничения крутящего момента в соответствии с изобретением.
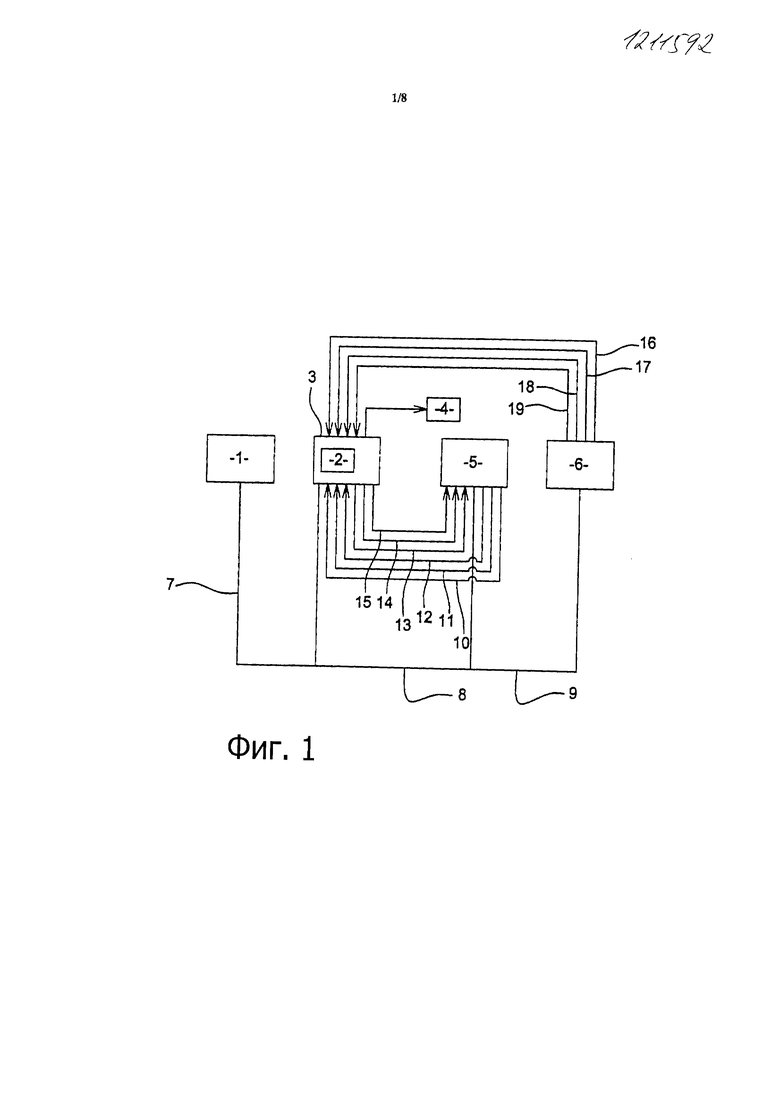
На фиг.1 показана электронная система управления, которой оборудовано транспортное средство с четырьмя ведущими колесами.
Представленная система управления содержит средства 1 определения характеристик работы транспортного средства, средство 3 управления приводом, средство 2 ограничения крутящего момента, входящее в состав средства 3 управления, привод 4 передачи крутящего момента, предназначенный для распределения крутящего момента на ведущие колеса транспортного средства, средство 5 управления двигателем и вычислительное устройство ABS 6.
Система управления использует, например, обмен данными между средством 5 управления двигателем (ЕСМ), которое управляет тепловым или электрическим двигателем транспортного средства, и средство 3 управления приводом (ETC) через шину данных (сеть CAN).
В данном случае средства 1 определения связаны со средством 3 управления приводом через линию 7 соединения, со средством 5 управления двигателем через линию 8 и с вычислительным устройством ABS 6 через линию 9. Средства 1 определения могут содержать физические датчики или вычислительные средства, выполненные с возможностью определения характеристических переменных работы транспортного средства на основании модели и данных, поступающих от других датчиков.
В данном случае средство 3 управления приводом связано на выходе со средством 5 управления двигателем через линии 13-15. Вычислительное устройство ABS 6 связано на входе со средством 3 управления приводом через линии 16-19.
Средства 1 определения передают, в частности, в направлении средства 3 управления приводом, средства 5 управления двигателем и вычислительного устройства ABS 6 сигналы, касающиеся, в частности, режима двигателя EngineSpeed, крутящего момента, задаваемого водителем DriverEngineTorqueReq, скорости правого переднего колеса WheelSpeed_FR, скорости левого переднего колеса WheelSpeed_FL, скорости правого заднего колеса WheelSpeed_RR, скорости левого заднего колеса WheelSpeed_RL, скорости транспортного средства VehicleSpeed.
Средство 3 управления приводом передает в направлении средства 5 управления двигателем сигнал времени ЕТС_С1оск через линию 13, который позволяет проверять обновление данных. Если счетчик регулярно не обновляется, средство 3 управления приводом немедленно деактивирует модуль 2 ограничения крутящего момента.
Средство 3 управления приводом передает в направлении средства 5 управления двигателем заданное значение крутящего момента ETL_EngTorqueReq через линию 14 и сигнал запроса ограничения крутящего момента ETL_TorqueReductionReq через линию 15, который в отсутствие своего подтверждения приводит к отсутствию применения ограничения крутящего момента средством 5 управления двигателем.
Средство 5 управления двигателем передает в направлении средства 3 управления приводом сигнал, связанный с режимом двигателя EngineSpeed через линию 10, с задаваемым водителем крутящим моментом DriverEngineTorqueReq через линию 11, сигнал времени ЕСМ_С1оск через линию 12 для проверки обновления данных и сигнал принятия ограничения крутящего момента ECM_TorqueAck через линию 12, который в отсутствие своего подтверждения приводит к немедленной деактивации модуля 2 ограничения крутящего момента. Если сигнал времени ЕСМ_С1ок регулярно не обновляется, средство 3 управления приводом немедленно деактивирует модуль 2 ограничения крутящего момента. Вычислительное средство ABS 6 соединено на входе со средством 3 управления приводом и передает в направлении средства 3 управления приводом данные скоростей четырех ведущих колес Wheel Speed_FR, Wheel Speed_RR, WheelSpeed_RL, WheelSpeed_FL через линии 16-19. Таким образом, из соображений обеспечения надежности оба средства управления 3 и 5 обмениваются данными для повышения робастности стратегии ограничения крутящего момента.
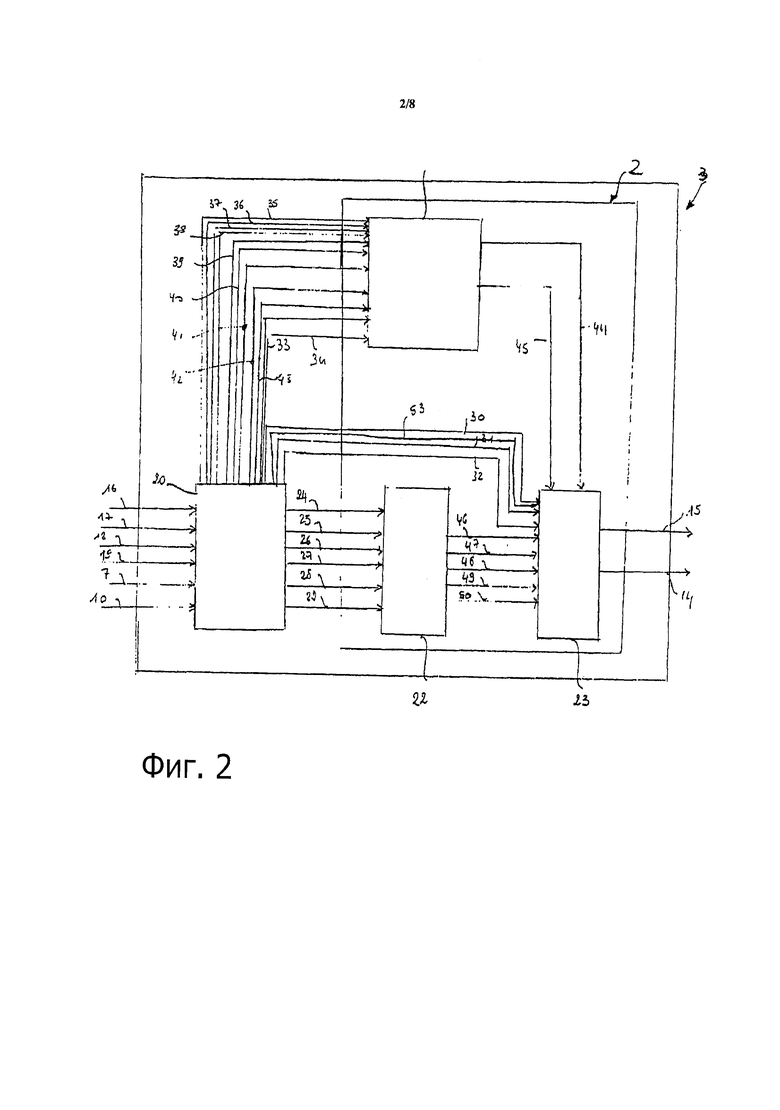
На фиг.2 показано средство 3 управления приводом, содержащее модуль 2 ограничения крутящего момента, обеспечивающий выработку заданного значения крутящего момента ETL_EngTorqueReq, передаваемого в средство 5 управления двигателем через линию 14, и сигнала запроса ограничения крутящего момента ETL_TorqueReductionReq через линию 15. Средство 3 управления приводом содержит общий первый модуль 20, второй модуль 21 активации/деактивации модуля 2 ограничения крутящего момента, третий модуль 22 фильтрации входных сигналов и четвертый модуль 23 определения заданного значения крутящего момента ETL_JEngTorqueReq. Второй, третий и четвертый модули 21, 22 и 23 образуют средство 2 ограничения крутящего момента.
Первый модуль 20 принимает, в частности, на входе крутящий момент DriverEngineTorqueReq, задаваемый водителем, от средств 1 определения через линию 7, режим двигателя EngineSpeed от средства 5 управления двигателем, скорости четырех колес WheelSpeed_FR, Wheel Speed_RR, WheelSpeed_RL, WheelSpeed_FL от вычислительного устройства ABS 6 соответственно через линии 16-19, первый модуль 20, связанный на входе с модулем 2 ограничения крутящего момента, передает сигналы, связанные со скоростями четырех колес WheelSpeed_FR, WheelSpeed_RR, WheelSpeed_RL, WheelSpeed_FL, с режимом двигателя EngineSpeed и с задаваемым водителем крутящим моментом DriverEngineTorqueReq соответственно через линии 24-29, сигналы, связанные с режимом системы (режим с четырьмя ведущими колесами, с двумя ведущими колесами или с четырьмя ведущими колесами с максимальной передачей крутящего момента на не ведущую ось) ETC_Mode через линию 30, с оценкой температуры управляемого привода 4x4 ETC_ActTemp через линию 31 и с заданным значением момента передачи на не ведущую ось ETC_TorqueDemand через линию 32.
Кроме того, он выдает два запроса внешней деактивации модуля 2 ограничения крутящего момента, при этом одна из них является постепенной ETL_ExtSlowDeactivation с изменением крутящего момента, ограниченным во времени, а другая - немедленной ETL_ExtFastDeactivation, соответственно через линии 33 и 34.
Первый модуль 20 передает также в направлении средства 2 ограничения крутящего момента логические значения подтверждения сигналов, связанных со скоростями четырех колес S_WheelSpeed_FR, S_WheelSpeed_RR, S_WheelSpeed_RL, S_WheelSpeed_FL, с режимом двигателя S_EngineSpeed, с режимом системы S_ETC_Mode, с температурой привода S_ETC_ActTemp, с заданным значением момента передачи на не ведущую ось S_ETC_TorqueDemande, с задаваемым водителем крутящим моментом S_ DriverEngineTorqueReq, соответственно через линии 35-43. Если сигнал, поступающий из шины данных, принимает логическое значение «неверно» или если значение сигнала, поступающего из шины данных, выходит за пределы определенного допустимого диапазона, соответствующее логическое значение подтверждения сразу же устанавливается на 1 и в противном случае оно остается на 0. Этот способ применяют для всех сигналов, поступающих из шины данных. Кроме того, можно осуществлять контроль достоверности.
Второй модуль 21 активации/деактивации модуля 2 ограничения крутящего момента связан на выходе с первым модулем 20 через линии 33-43 и принимает логические значения подтверждения сигналов, связанных со скоростями четырех колес S_WheelSpeed_FR, S_WheelSpeed_RR, S_WheelSpeed_RL, S_WheelSpeed_FL, с режимом двигателя S_EngineSpeed, с режимом системы S_ETC_Mode, с температурой привода S_ETC_ActTemp, с заданным значением момента передачи на не ведущую ось S_ETC_TorqueDemande, с задаваемым водителем крутящим моментом S_ DriverEngineTorqueReq, соответственно через линии 35-43, и сигналы внешней деактивации ETL_ExtSlowDeactivation и ETLE_xtFastDeactivation, соответственно через линии 33 и 34. На выходе он выдает булев сигнал немедленной деактивации ETL_SevereDeactivation и сигнал постепенной деактивации ETL_LightDeactivation в направлении четвертого модуля 23 определения заданного значения крутящего момента соответственно через линии 44 и 45. Со ссылками на следующую фигуру будет описан вариант выполнения.
Третий модуль 22 связан на выходе с первым модулем 20 через линии 24-29 и принимает на входе сигналы, связанные со скоростями четырех колес WheelSpeed_FR, WheelSpeed_RR, WheelSpeed_RL, WheelSpeed_FL, с режимом двигателя EngineSpeed и с задаваемым водителем крутящим моментом DriverEngineTorqueReq соответственно через линии 24-29. Он осуществляет фильтрацию некоторых из этих входных сигналов при помощи фильтра нижних частот первого порядка. В частности, он оценивает включенную передачу коробки передач GearBoxRatio и скорость транспортного средства VehicleSpeed. Он выдает фильтрованные сигналы FltVehicleSpeed, FltDriverEngineTorqueReq, FltEngineSpeed, FltFrRrWheelSpeed и включенное передаточное отношение GearBoxRatio в направлении четвертого модуля 23 определения заданного значения крутящего момента соответственно через линии 46-50. Со ссылками на следующую фигуру будет описан вариант выполнения третьего модуля 22.
Четвертый модуль 23 связан на входе с первым, вторым и третьим модулями 20, 21 и 22 и принимает на входе сигналы, связанные с деактивацией, от второго модуля 21 через линии 44 и 45, фильтрованные сигналы и включенное передаточное отношение коробки от третьего модуля 22 через линии 46-50 и входные сигналы, связанные с оценкой температуры привода 4x4 ETC_ActTemp через линию 30, с режимом системы ETCJVlode через линию 31 и с заданным значением момента передачи на не ведущую ось ETC_TorqueDemand через линию 32, от первого модуля 20. В зависимости от этих входных данных он вырабатывает два выходных сигнала для средства 5 управления двигателем: первый выходной сигнал, связанный с заданным значением крутящего момента ETL_EngTorqueReq, и логическое значение запроса ограничения крутящего момента ETL_TorqueReductionReq соответственно через линии 14 и 15.
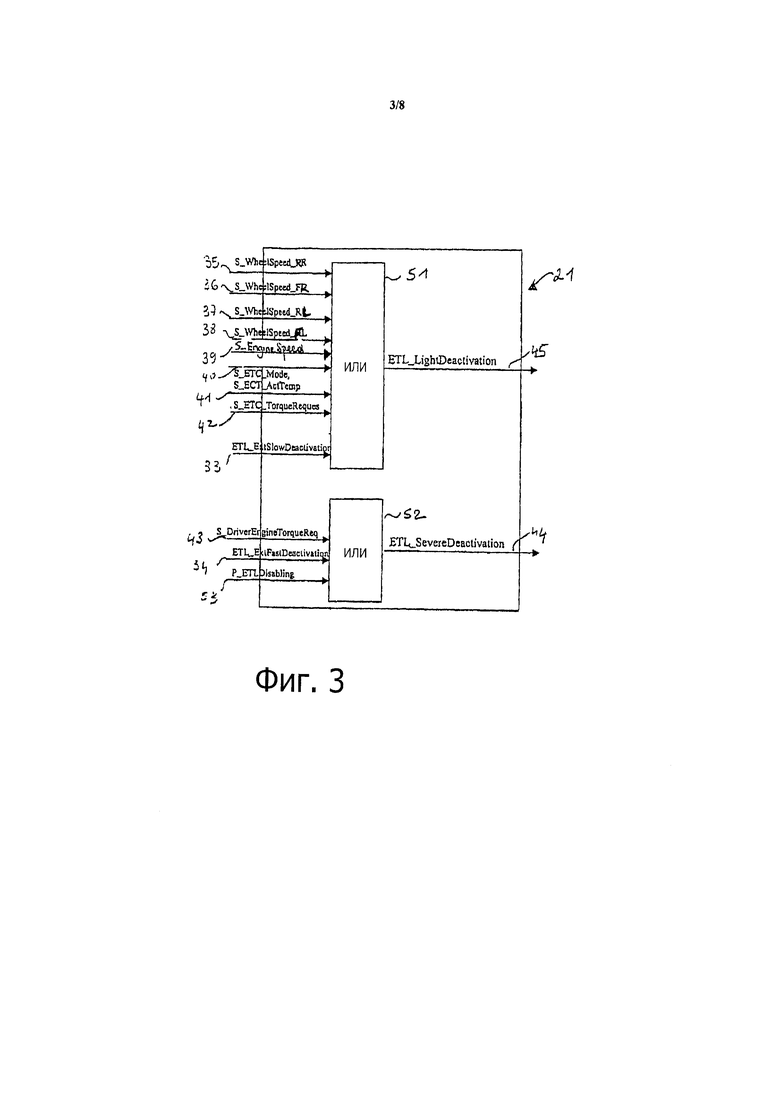
На фиг.3 представлен вариант выполнения второго модуля 21. Он содержит первый логический модуль «ИЛИ» 51, связанный на выходе с первым модулем 20 через линии 33 и 35-42 и получающий на входе логические значения подтверждения, связанные со скоростями четырех колес S_WheelSpeed_FR, S_WheelSpeed_RR, S_WheelSpeed_RL, S_WheelSpeed_FL, с режимом двигателя S_EngineSpeed, с режимом системы S_ETC_Mode, с оценкой температуры управляемого привода 4x4 S_ETC_ActTemp, с заданным значением момента передачи на не ведущую ось SETCTorqueRequest, соответственно через линии 35-42, и сигнал, связанный с запросом внешней деактивации модуля 2 ограничения крутящего момента ETL_ExtSlowDeactivation через линию 33. Первый логический модуль «ИЛИ» 51 вырабатывает на выходе сигнал, связанный с постепенной деактивацией ETL_LightDeactivation, в направлении четвертого модуля 23 через линию 45.
Второй модуль 21 содержит второй логический модуль «ИЛИ» 52, принимающий на входе логическое значение подтверждения, связанное с задаваемым водителем крутящим моментом S_DriverEngineTorqueReq, через линию 42, сигнал, связанный с запросом внешней немедленной деактивации крутящего момента ETL_ExtFastDeactivation, через линию 34, и сигнал, связанный с деактивацией, осуществляемой при помощи калибровочных приборов P_ETLDisabling, через линию 53. На выходе он выдает булев сигнал немедленной деактивации ETL_SevereDeactivation в направлении четвертого модуля 23 через линию 44.
Первый логический модуль «ИЛИ» 51 производит логическую операцию типа «ИЛИ» между различными булевыми сигналами, принятыми на входе модуля. Если логическое значение, связанное с режимом системы S_ETCMode, не равно нулю, то есть если возникает неуверенность в режиме системы, или если, по меньшей мере, одно логическое значение, связанное со скоростью колеса S_WheelSpeedRR, например, не равно нулю, то есть, по меньшей мере, одна данная о скорости колес считается ошибочной, или если булев сигнал, связанный с внешней постепенной деактивацией ETL_ExtSlowDeactivation, не равен нулю, то есть средство 3 управления приводом выявило незначительную неисправность, например, сбой протокола связи между средством управления приводом и приборным щитком, булев сигнал на выходе первого логического модуля «ИЛИ» 51, относящийся к постепенной деактивации ETL_LightDeactivation, будет не равным нулю булевым сигналом, указывающим, что модуль ограничения крутящего момента необходимо остановить и его можно постепенно деактивировать.
Второй логический модуль «ИЛИ» 52 осуществляет логическую операцию типа «ИЛИ» между тремя булевыми сигналами, поступающими на вход модуля. Если логическое значение сигнала, относящегося к задаваемому водителем крутящему моменту S_DriverEngineTorqueReq, не равно нулю, или если булев сигнал, связанный с калибровочными приборами, не равен нулю, или если булев сигнал, касающийся немедленной внешней деактивации ETL_ExtFastDeactivation, не равен нулю, то есть выявлена серьезная неисправность, например сбой протокола связи между средством 3 управления приводом и средством 5 управления двигателем, булев сигнал на выходе второго логического модуля 52, связанный с немедленной деактивацией ETL_SevereDeactivation, будет не равным нулю булевым сигналом, указывающим, что модуль ограничения крутящего момента обязательно следует остановить немедленно. Таким образом, ограничение крутящего момента оказывается защищенным, так как его можно деактивировать немедленно или постепенно в зависимости от характера неисправности и/или от ситуации вождения.
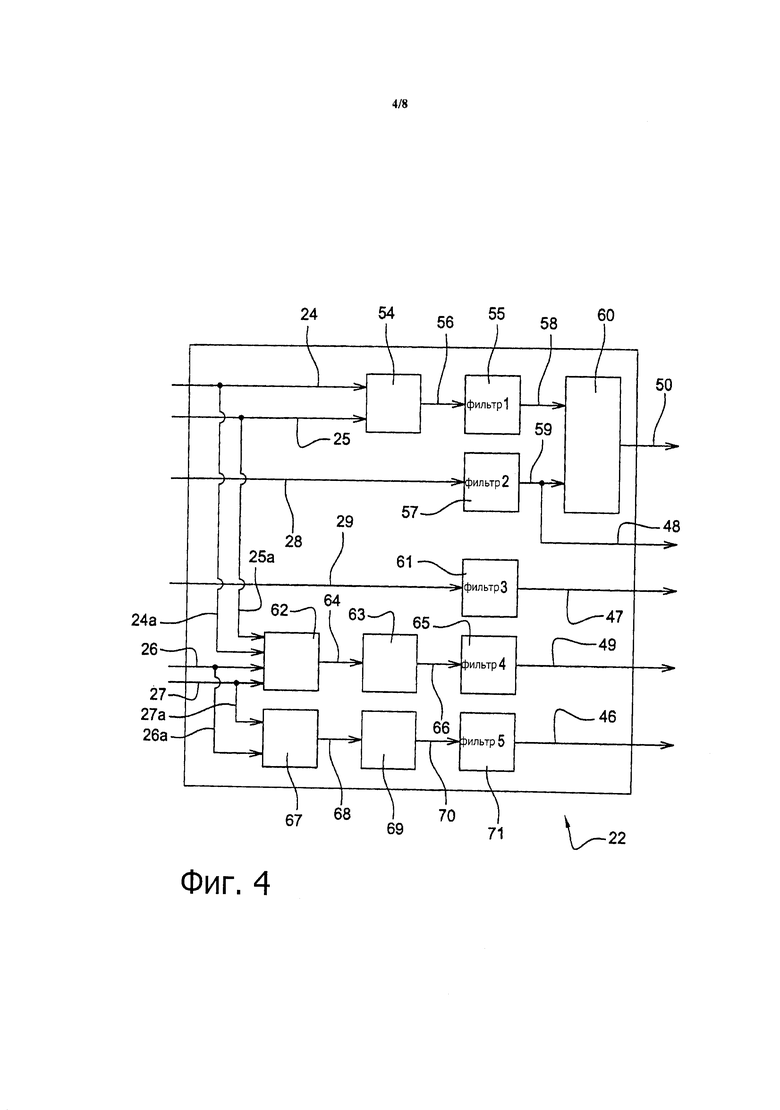
На фиг.4 показан вариант выполнения третьего модуля 22. Первый модуль 54 вычисления среднего значения принимает на входе значения скоростей передних колес WheelSpeed_FR и WheelSpeed_FL через линии 24 и 25 и передает на выходе среднее значение этих скоростей в первый фильтр 55 нижних частот первого порядка через линию 56. Первый фильтр 55 генерирует фильтрованную скорость переднего моста транспортного средства FltFrontAxleSpeed, чтобы устранить любой шум высокой частоты. Второй фильтр 57 нижних частот первого порядка фильтрует скорость вращения двигателя Engine Speed, полученную через линию 28, и выдает фильтрованный сигнал, связанный с режимом двигателя FltEngineSpeed, в направлении четвертого модуля 23 через линию 48.
Результаты на выходе первого и второго фильтров 55 и 57 представляют собой входные сигналы соответственно через линии 58 и 59 для модуля 60 определения передаточного отношения коробки передач, пример которого будет более подробно представлен со ссылками на следующую фигуру. Модуль определения передаточного отношения коробки передач определяет включенную передачу GearBoxRatio и передает ее значение в четвертый модуль 23 через линию 50.
Третий фильтр 61 нижних частот первого порядка фильтрует сигнал, касающийся задаваемого водителем крутящего момента DriverEngineTorqueReq, принятый через линию 29, для устранения любого высокочастотного шума и выдает на выходе фильтрованный сигнал FltDriverEngineTorqueReq в направлении четвертого модуля 23 через линию 47. Второй вычислительный модуль 62 принимает на входе четыре скорости колес WheelSpeed_FR, WheelSpeed_RR, WheelSpeed_RL, WheelSpeed_FL через линии 24a, 25a, 26 и 27 и вычисляет среднее значение разности скорости переднего моста и заднего моста транспортного средства. Среднее значение разности скорости переднего моста и заднего моста поступает в полосовой фильтр 63 через линию 64, чтобы устранить явление механической неустойчивости. Фильтрацию разности скорости переднего моста по отношению к заднему мосту при помощи фильтра нижних частот и режекторного фильтра применяют для улучшения характеристик преодоления препятствий и моторики.
Затем сигнал, выдаваемый полосовым фильтром, поступает в четвертый фильтр 65 нижних частот первого порядка через линию 66 для фильтрации среднего значения разности скорости переднего моста и заднего моста с целью устранения любого высокочастотного шума. Четвертый фильтр 65 нижних частот выдает фильтрованный сигнал FltFrRrWheelSlip в направлении четвертого модуля 23 через линию 49. Третий модуль 67 вычисления среднего значения принимает на входе значения скоростей двух задних колес WheelSpeed_RR и WheelSpeed_RL через линии 26а и 27а и вычисляет среднее значение этих скоростей. При прохождении через линию 68 в умножителе 69 происходит умножение сигнала, выдаваемого третьим модулем 67 вычисления среднего значения, на радиус колес. Умножитель выдает сигнал через линию 70 в пятый фильтр 71 нижних частот первого порядка, позволяющий устранить любой шум высокой частоты. На выходе пятого фильтра 71 фильтрованная скорость транспортного средства FltVehicleSpeed поступает в четвертый модуль 23 через линию 46.
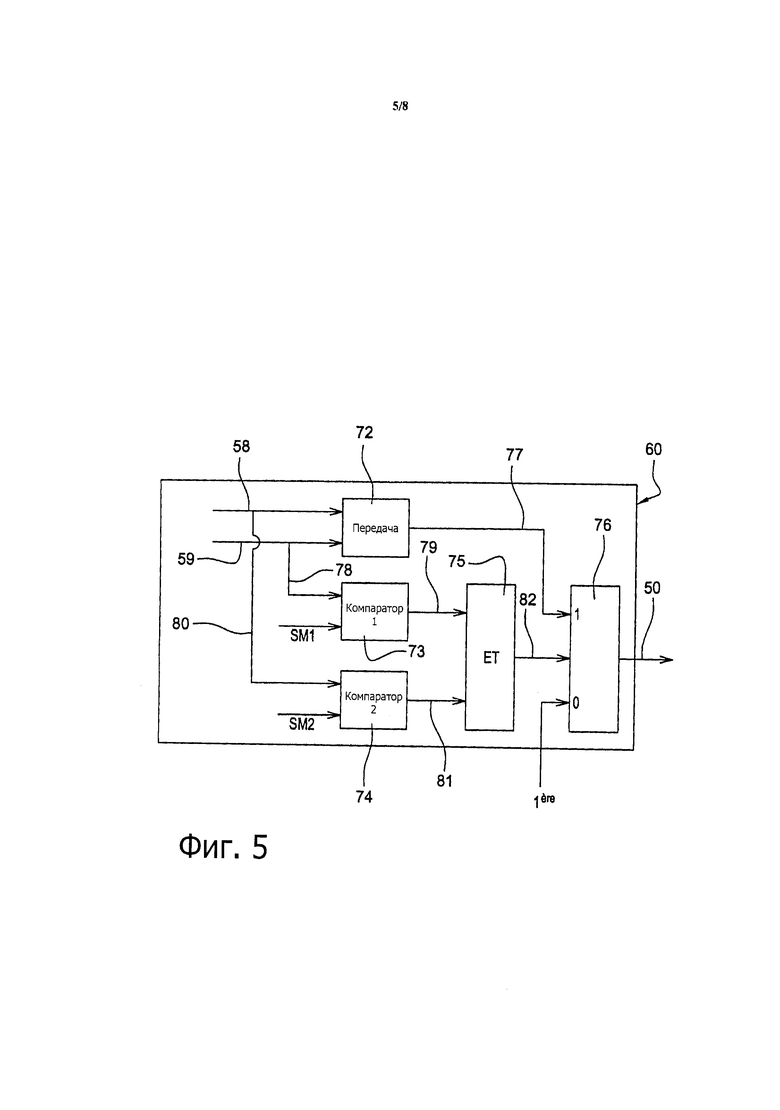
На фиг.5 показан вариант определения передаточного отношения коробки передач GearBoxRatio при помощи модуля 60 определения передаточного отношения коробки. Модуль 60 определения содержит делитель 72, первый компаратор 73, второй компаратор 74, логический модуль «И» 75 и переключатель 76. Делитель 72 принимает через линии 58 и 59 соответственно фильтрованные сигналы, связанные со скоростью переднего моста FltFrontAxleSpeed и с фильтрованной скоростью двигателя FltEngineSpeed. Он вычисляет соотношение этих двух сигналов и передает его через линию 77 в переключатель 76. Первый компаратор 73, который получает фильтрованную скорость переднего моста FltFrontAxleSpeed через линию 78, сравнивает ее с первым минимальным порогом SM1 и выдает булев сигнал через линию 79 в направлении логического модуля «И» 75. Второй компаратор 74, который получает фильтрованную скорость двигателя FltEngineSpeed через линию 80, сравнивает ее со вторым минимальным порогом SM2 и выдает булев сигнал через линию 81 в логический модуль «И» 75. Логический модуль «И» 75 связан на входе с переключателем 76 через линию 82 и выдает булев сигнал. Если булев сигнал на выходе логического модуля «И» 75 принимает логическое значение 1, значит включенное передаточное отношение коробки GearBoxRatio, передаваемое переключателем 76 в четвертый модуль 23 через линию 50, равно отношению, вычисленному делителем 72. Если булев сигнал на выходе логического модуля «И» 75 принимает логическое значение 0, то есть соответствующее режиму малого газа двигателя и/или низкой скорости передней оси, то включаемой передачей коробки по умолчанию будет первая передача.
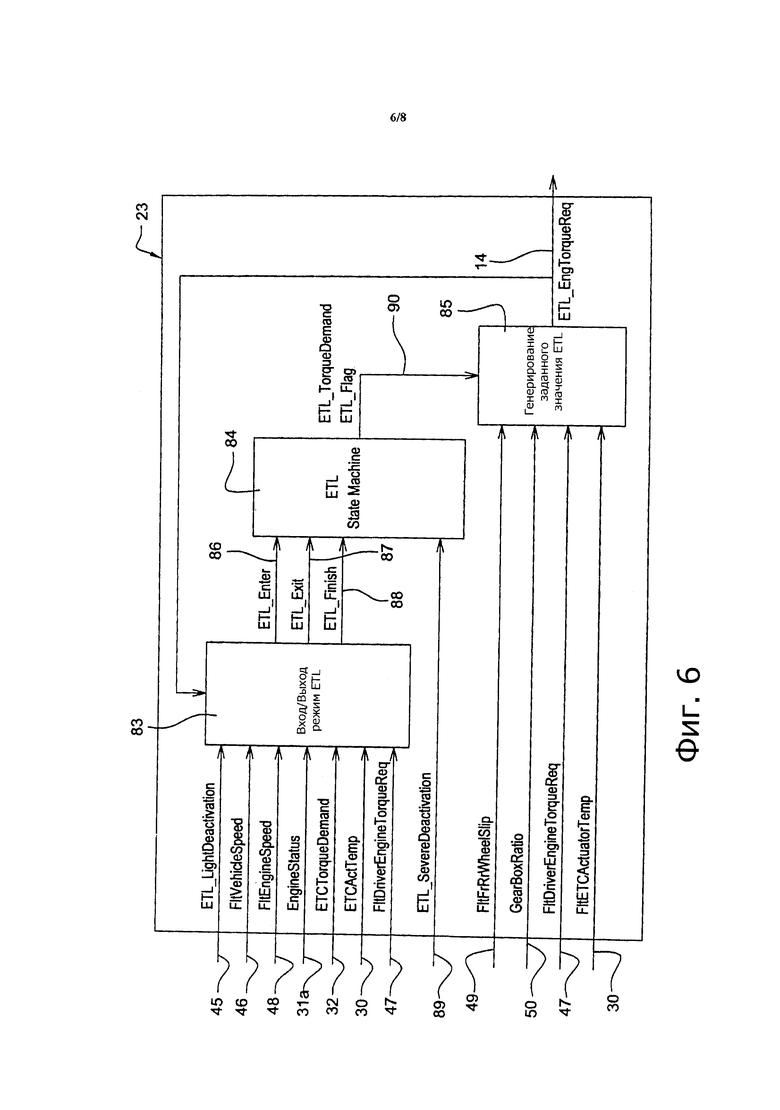
На фиг.6 представлен вариант выполнения четвертого модуля 23 определения заданного значения ограничения крутящего момента. Он содержит модуль 83 выработки сигналов управления, предназначенных для модуля 84 определения состояния модуля ограничения крутящего момента, и модуль 85 генерирования заданного значения ограничения крутящего момента. Эти три модуля 83, 84 и 85 связаны обратной связью: модуль 85 генерирования заданного значения ограничения крутящего момента связан на выходе с модулем 83 выработки сигналов управления.
Модуль 83 выработки сигналов управления принимает на входах сигнал, связанный с постепенной деактивацией ETL_LightDeactivation, от второго модуля 21 через линию 45, фильтрованные сигналы от третьего модуля 22, связанные со скоростью транспортного средства FltVehicleSpeed, с режимом двигателя FltEngineSpeed и с задаваемым водителем крутящим моментом FltDriverEnginetTorqueReq, соответственно через линии 46-48, и сигналы, связанные с оценкой температуры привода 4×4 ETC_ActTemp, через линию 30, с заданным значением момента передачи на не ведущую ось ETC_TorqueDemand, через линию 32, и со статусом двигателя EngineStatus, через линию 31а, от первого модуля 20. Модуль 83 выработки сигналов управления вырабатывает три булевых командных сигнала активации и деактивации в зависимости от определенных условий, проверяемых или нет входными сигналами: сигнал неактивности ETL_Exit модуля ограничения крутящего момента, сигнал активности ETL_Enter модуля ограничения крутящего момента и сигнал конца ETL_Finish запроса ограничения крутящего момента, передаваемые соответственно через линии 86-88 в направлении модуля 84 определения состояния.
Сигнал неактивности ETL_Exit модуля ограничения крутящего момента является верным, если не соблюдены все условия для его пребывания в режиме ограничения крутящего момента. В данном примере ETL_Exit является верным, если сигнал, связанный с немедленной деактивацией ETL_SevereDeactivation, является верным или если сигнал, связанный с постепенной деактивацией ETL_LightDeactivation, является верным, или если фильтрованная скорость транспортного средства превышает определенный максимальный порог, или если двигатель не работает, или если фильтрованная скорость режима двигателя FltEngineSpeed ниже определенного минимального порога, или если заданное значение момента передачи на не ведущую ось ETC_TorqueDemand меньше определенного минимального порога, или если температура привода 4x4 ETC_ActTemp ниже определенного минимального порога, или если режим транспортного средства ETCJVTode является «режимом 4x2». Если по меньшей мере одно из этих условий проверяется, ограничение крутящего момента прекращается. Следует учесть, что в зависимости от типа предусматриваемой функции можно поменять одно или несколько из этих условий. Например, если необходимо, чтобы модуль 2 ограничения крутящего момента был постоянно включен независимо от скорости транспортного средства, можно исключить условие, касающееся скорости. Это исключение производят просто посредством калибровки, устанавливая порог скорости выше максимальной скорости транспортного средства.
Сигнал активности ETL_Enter модуля ограничения крутящего момента является верным, если режим ограничения крутящего момента является активным. В данном примере ETL_Enter является верным, если сигналы деактивации ETL_SevereDeactivation и ETLLightDeactivation являются неверными, и если сигнал неактивности ETL_Exit является неверным, и если фильтрованная скорость транспортного средства меньше минимального порога, и если транспортное средство движется, и если фильтрованная скорость режима двигателя превышает максимальный порог, и если заданное значение момента передачи на не ведущую ось ETC_TorqueDemand превышает определенный максимальный порог, если температура привода 4x4 ETC_ActTemp превышает определенный максимальный порог, и если режим транспортного средства ETC_Mode не является режимом «4×2».
Сигнал конца ETLFinish ограничения крутящего момента является верным, если заданное значение крутящего момента, определенное модулем 85 генерирования заданного значения крутящего момента, превышает или равно фильтрованному сигналу крутящего момента, задаваемого водителем FltDriverEngineTorqueDemand, или если состояние модуля ограничения крутящего момента является активным в течение более определенного периода, называемого TimeOut.
Модуль 84 определения состояния модуля является машиной состояния, связанной на выходе с модулем 83 выработки сигналов управления, и принимает вышеупомянутые три сигнала через линии 86-88 и сигнал, связанный с немедленной деактивацией модуля ETL_SevereDeactivation, через линию 89. В зависимости от этих входных сигналов модуль 84 определения состояния модуля вырабатывает первый сигнал ETL_State, отображающий состояние системы. Этот сигнал ETL_State является общим для разных модулей четвертого модуля 23.
При этом можно рассматривать четыре основных состояния.
Состояние «отсутствия запроса ограничения крутящего момента», представленное нулевым значением сигнала ETL_State, которое устанавливается, когда сигнал, связанный с немедленной деактивацией ETL_SevereDeactivation является верным.
Состояние «ожидания», отображаемое значеием ETL_State, равным 1, когда сигнал, связанный с немедленной деактивацией ETL_SevereDeactivation является неверным, и сигнал активности ETL_Enter является неверным. Действительно, это состояние ожидания соответствует случаю, когда не удовлетворены все условия для осуществления запроса ограничения крутящего момента.
Состояние «возможности ограничения крутящего момента», отображаемое значением ETL_State, равным 2, которое устанавливается, когда сигнал, связанный с немедленной деактивацией ETL_SevereDeactivation является неверным, сигнал активности ETL_Enter является верным, и сигнал неактивности ETL_Exit является неверным.
Состояние, которое способствует запросу водителя, когда «возможность действия переходит к водителю», отображенное значением ETL_State, равным 3, устанавливается, когда сигнал, связанный с немедленной деактивацией ETL_SevereDeactivation является неверным, сигнал активности ETL_Enter является неверным или сигнал неактивности ETL_Exit является верным, и если сигнал конца ограничения ETL_Finish является неверным. В этом случае состояние соответствует случаю, когда все условия для осуществления запроса ограничения крутящего момента больше не удовлетворяются. В этом случае возможность действия постепенно переходит к водителю. Искомый момент является при этом крутящим моментом, задаваемым водителем и представленным сигналом FltDriverEngineTorquedemand.
В зависимости от состояния модуля ограничения крутящего момента, представленного переменной ETL_State, модуль 84 определения состояния модуля ограничения крутящего момента вырабатывает первый и второй булевы сигналы, направляемые для модуля генерирования заданного значения ограничения крутящего момента через линию 90. Первый сигнал ETL_TorqueDemand является сигналом, связанным с реальным запросом ограничения крутящего момента, и второй сигнал ETL_Flag можно определить как сигнал, дающий информацию о способности системы ответить на запрос ограничения крутящего момента. Вариант способа определения состояния системы модулем 84 определения состояния модуля описан со ссылками на фиг.7.
Модуль 85 генерирования заданного значения ограничения крутящего момента связан на выходе с модулем 84 определения состояния модуля ограничения крутящего момента и принимает на входе два булевых сигнала ETL_TorqueDemand и ETL_Flag, касающихся состояния системы, через линию 90, а также фильтрованный сигнал буксования передний мост - задний мост FltFrRrWheelSlip через линию 49, включенное передаточное отношение коробки передач GearBoxRatio через линию 50, фильтрованный сигнал FltDriverEngineTorquedemand, связанный с запросом крутящего момент водителем, через линию 47, и оценку температуры управляемого привода 4x4 ETC_ActuatorTemp через линию 30. Таким образом, реализация заданного значения ограничения крутящего момента ETL_EngTorqueReq на выходе модуля 85 генерирования заданного значения ограничения крутящего момента является функцией температуры привода ETC_ActuatorTemp.
Таким образом, четвертый модуль 23 выдает на выходе заданное значение ограничения крутящего момента, которое меняется в зависимости от состояния системы и, следовательно, от времени. Установление обратной связи между модулями четвертого модуля 23 позволяет контролировать заданное значение ограничения крутящего момента на выходе в зависимости от различных параметров транспортного средства.
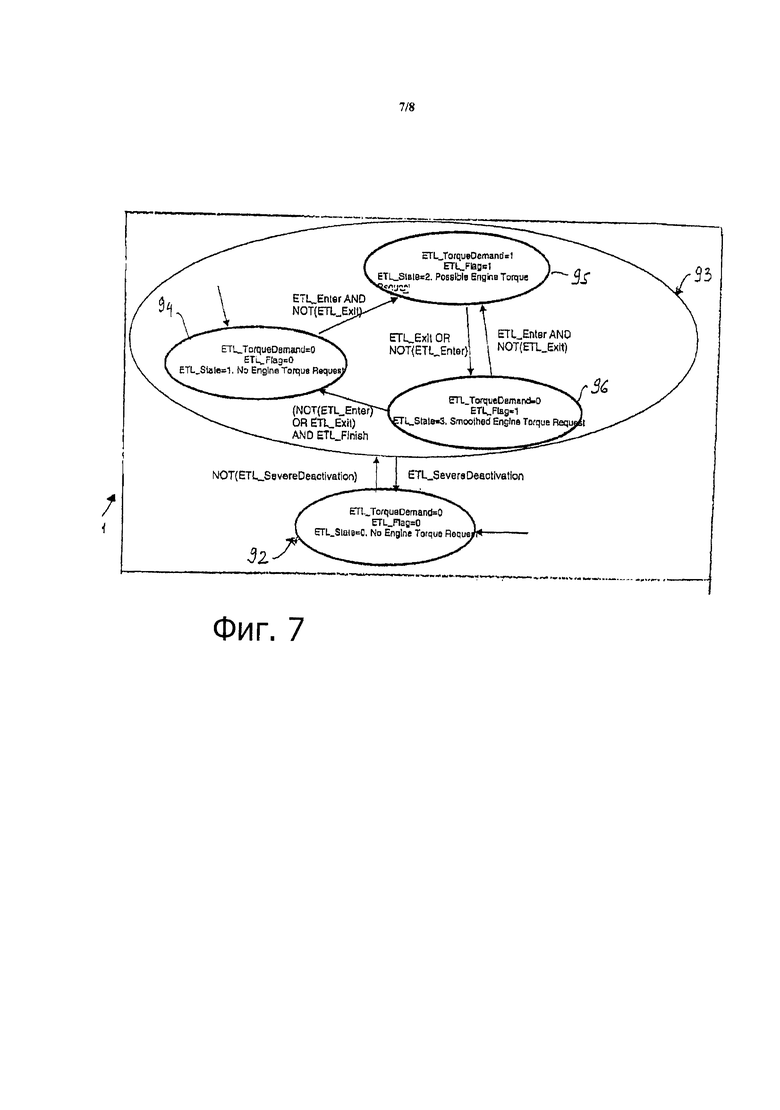
На фиг.7 представлен вариант осуществления способа определения двух булевых сигналов на выходе модуля 84 определения состояния модуля ограничения крутящего момента через линию 90. Он учитывает описанные выше четыре состояния, отображаемые переменной ETL_State. Способ 86 содержит этап 92 инициализации и цикл 93. Когда происходит немедленная деактивация (сигнал ETL_SevereDeactivation является верным), нулевое значение переменной состояния ETL_State соответствует отсутствию реального запроса ограничения крутящего момента. Поскольку нет реального запроса ограничения крутящего момента, сигнал ETL_TorqueDemand принимает нулевое значение. Кроме того, система не может ответить на запрос ограничения крутящего момента, поэтому сигнал ETL_Flag принимает нулевое значение. Действительно, как только происходит немедленная деактивация модуля ограничения крутящего момента, не может быть и запроса уменьшения крутящего момента. Этот случай представляет собой этап 92 инициализации способа 91.
Если нет немедленной деактивации, осуществляют цикл 93. Он содержит первый этап 94, когда ETL_State принимает значение 1. Во время этого первого этапа 94 условия для осуществления запроса не удовлетворены, например, скорость транспортного средства является слишком высокой, ETL_TorqueDemand и ETL_Flag принимают нулевые значения. Если условия для запросы являются удовлетворительными, переходят на второй этап 95: ETL_State принимает значение 2, и сигнал, связанный с запросом ограничения крутящего момента ETL_TorqueDemand, и сигнал способности системы ответить на этот запрос ETL_Flag принимают значение 1. Если условия для осуществления запроса ограничения крутящего момента больше не удовлетворяются, переходят на третий этап 96: ETL_State принимает значение 3, сигнал, связанный с запросом ограничения крутящего момента ETL_TorqueDemand, является нулевым. Возможность ограничения крутящего момента переходит к водителю, но, учитывая состояние системы, ограничение крутящего момента возможно, сигнал ETL_Flag принимает значение 1. Если осуществляют этап 96, то есть когда ETL_State равен 3, состояние системы больше не позволяет осуществлять запрос (например, скорость транспортного средства является слишком высокой), переходят на первый этап 94: ETL_State принимает значение 1, и состоянием является состояние «ожидания». Можно также перейти от третьего этапа 96 на второй этап 95, если крутящий момент, задаваемый водителем, превышает заданное значение крутящего момента. Таким образом, крутящий момент может быть ограничен, только когда ETL_Flag равен 1.
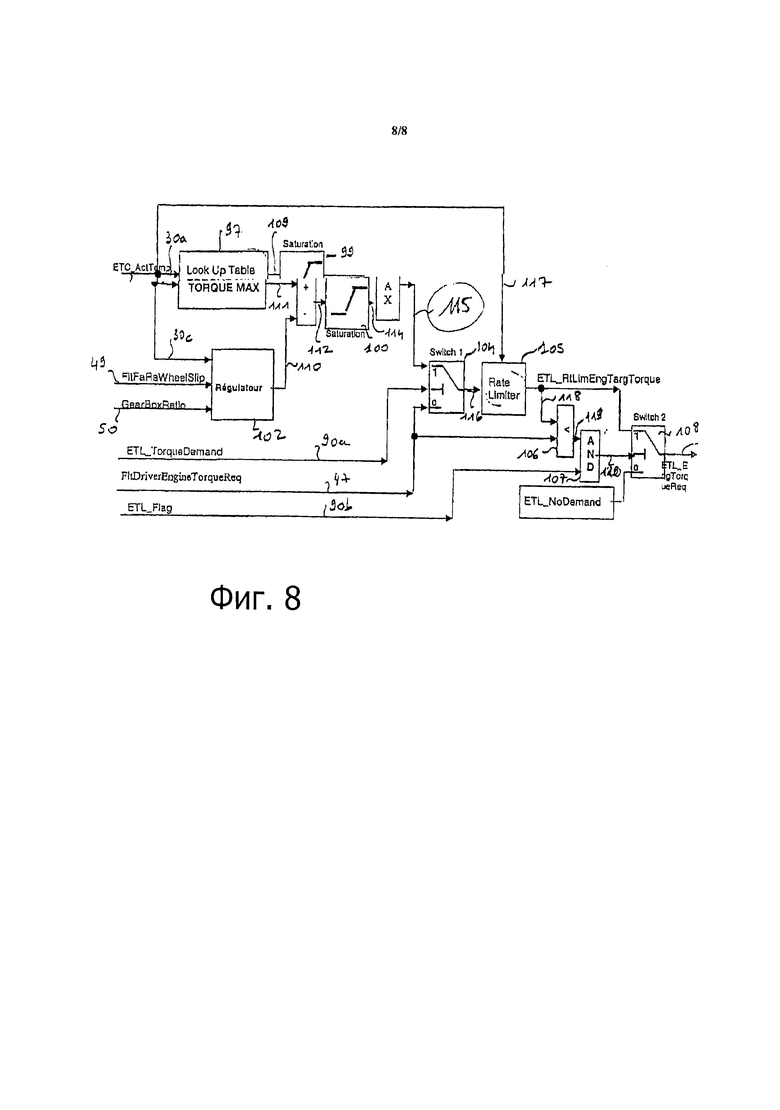
На фиг.8 показана возможная реализация заданного значения ограничения крутящего момента ETL_EngTorqurReq. Модуль 95 генерирования заданного значения ограничения крутящего момента содержит таблицу минимального порога крутящего момента 97, таблицу максимального порога крутящего момента 98, первый блок насыщения 99, второй блок насыщения 100, вычитатель 101, регулятор 102, средство 103 определения максимума значений, первый переключатель 104, ограничитель порога 105, компаратор 106, логический модуль «И» 107 и второй переключатель 108.
Входной данной для таблицы минимального порога крутящего момента 97 и для таблицы максимального порога крутящего момента 98 является оценка температуры привода ETC_ActTemp, которую вводят через линию 30а. В любой момент заданное значение крутящего момента ограничено между двумя значениями TorqueMin и TorqueMax, которые являются функциями температуры привода ETC_ActTemp.Для этого нижний порог, определяемый таблицей минимального порога крутящего момента 97, представляет собой входной сигнал первого блока 99 насыщения, поступающий через линию 109, который ограничивает значение на выходе таблицы минимального порога TorqueMin калиброванным значением P_EngTorqueReqMin. Регулятор 102 получает на входе оценку температуры привода ETC_ActTemp через линию 30с, включенное передаточное число коробки GearBpxRatio через линию 50 и фильтрованную разность между ведущей осью и не ведущей осью FltFrRrWheelSlip через линию 49. Он позволяет производить интрузивное регулирование для промежуточных температур привода или, наоборот, получать регулирование с максимумом эффективности, воспринимаемое в случае критической температуры привода.
Зависимость относительно включенного передаточного отношения коробки передач необходима, если рассматривать стабильность системы. После регулирования выходной сигнал регулятора 102 передается в направлении вычитателя 101 через линию 110 и вычитается вычитателем 102 из максимума крутящего момента TorqueMax.
Максимум крутящего момента передается через линию 111 таблицей 98 максимального порога крутящего момента, которая получила оценку температуры привода ETC_ActTemp через линию 30b. Результат этого вычитания поступает через линию 112 на вход второго блока 100 насыщения, который ограничивает значение на выходе вычитателя 101 калиброванным значением P_EngTorqueReqMax. Эти два параметра P_EngTorqueReqMax и P_EngTorqueReqMin являются параметрами регулирования функции насыщения.
Средство 103 определения максимума значений получает на входе регулированное максимальное значение и минимальное значение крутящего момента TorqueMin и TorqueMaxReg соответственно через линии связи 113 и 114. На выходе оно передает через линию 115 заданное значение крутящего момента ETL_EngTargTorque, ограниченное между параметрами P_EngTorqueReqMin и P_EngTorqueReqMax, в первый переключатель 104, который в зависимости от значения булева сигнала ETL_TorqueDemand, принятого через линию 90а, выдаст это заданное значение крутящего момента или заданное значение задаваемого водителем крутящего момента FltDriverEngineTorquedemand. Если ETL_TorqueDemand равно 1, то искомым крутящим моментом является ETL_EngTargTorque, зависящий от температуры привода ETC_ActTemp, от буксования передний мост - задний мост FltFrRrWheelSlip и от включенной передачи GearBoxRatio, в противном случае искомым крутящим моментом является момент, задаваемый водителем.
Крутящий момент ETL_EngTargTorque, выдаваемый средством 103 определения максимума значений, представляет собой входную данную ограничителя 105 через линию 116, который принимает также значение температуры привода ETC_ActTemp через линию 117 и который ограничивает колебания во времени заданного значения крутящего момента ETL_EngTargTorque в зависимости от температуры привода. Например, при высокой температуре допускаются более сильные колебания.
Ограничитель 105 выдает на выходе ограниченное заданное значение крутящего момента ETL_RtLimEngTargTorque, которое поступает на вход через линию 118 в компаратор 106, сравнивающий его с запросом заданного значения крутящего момента от водителя FltDriverEngineTorqueReq.
Компаратор 106 выдает булев сигнал. Этот булев сигнал поступает на вход логического модуля «И» 107 через линию 119. Булев сигнал ETL_Flag поступает на вход логического модуля «И» 107 через линию 90b.
Логический модуль «И» 107 передает булев сигнал во второй переключатель 108 через линию 120. В зависимости от задаваемого водителем крутящего момента и от состояния системы второй переключатель 108 передает заданное значение крутящего момента через линию 14.
Если выход логического модуля «И» 107 равен 1, то есть если задаваемый водителем крутящий момент больше, чем момент, вычисленный регулятором, и если ETL_Flag равен 1, значит крутящий момент ограничен, и заданное значение крутящего момента равно ETL_RtLimEngTargTorque, в противном случае не осуществляется никакого запроса кутящего момента.
Таким образом, ограничение крутящего момента, позволяющее довести до максимума способность преодоления препятствий и моторику транспортного средства, оборудованного управляемой системой 4x4, зависит от ситуации вождения и от состояния системы 4x4.
Кроме того, его надежность повышается за счет робастного обмена данными между средством управления двигателем и средством управления приводом, за счет деактивации в зависимости от серьезности неисправности и за счет ограничения крутящего момента, постоянно меньшего или равного моменту, задаваемому водителем. Кроме того, это ограничение крутящего момента зависит от оценочной или измеренной температуры привода.
Действительно, максимальное заданное значение крутящего момента, обеспечивающее превентивное действие, и минимальное заданное значение крутящего момента, обеспечивающее корректирующее действие, зависят от температуры привода.
Точно так же, это ограничение крутящего момента зависит от включенной передачи с максимальным заданным значением крутящего момента и минимальным заданным значением крутящего момента, зависящими от включенного передаточного отношения.
Наконец, определяемое таким образом ограничение крутящего момента позволяет постепенно передать водителю возможность действия, благодаря механизму, ограничивающему изменения крутящего момента во времени.
Этот механизм ограничения изменений крутящего момента зависит от температуры привода, как показано на фиг.8. При низкой температуре приоритет отдается комфорту и возможности преодоления препятствий, и при высокой температуре - прочности и возможности использования привода.
Изобретение относится к системам трансмиссии для автотранспортных средств, в частности к области управления системами трансмиссии автотранспортных средств с четырьмя ведущими колесами. Система ограничения крутящего момента автотранспортного средства с четырьмя ведущими колесами содержит управляемый привод, выполненный с возможностью распределения крутящего момента на ведущие колеса, вычислительные средства для вычисления по меньшей мере одной характеристической переменной работы транспортного средства и модуль (2) ограничения крутящего момента. Упомянутый модуль (2) содержит средства (23) выработки заданного значения крутящего момента и средства (21) деактивации модуля ограничения крутящего момента в зависимости от характеристических переменных работы двигателя. Способ ограничения крутящего момента предусматривает как немедленную, так и постепенную деактивацию модуля ограничения крутящего момента. 2 н. и 8 з.п. ф-лы, 8 ил.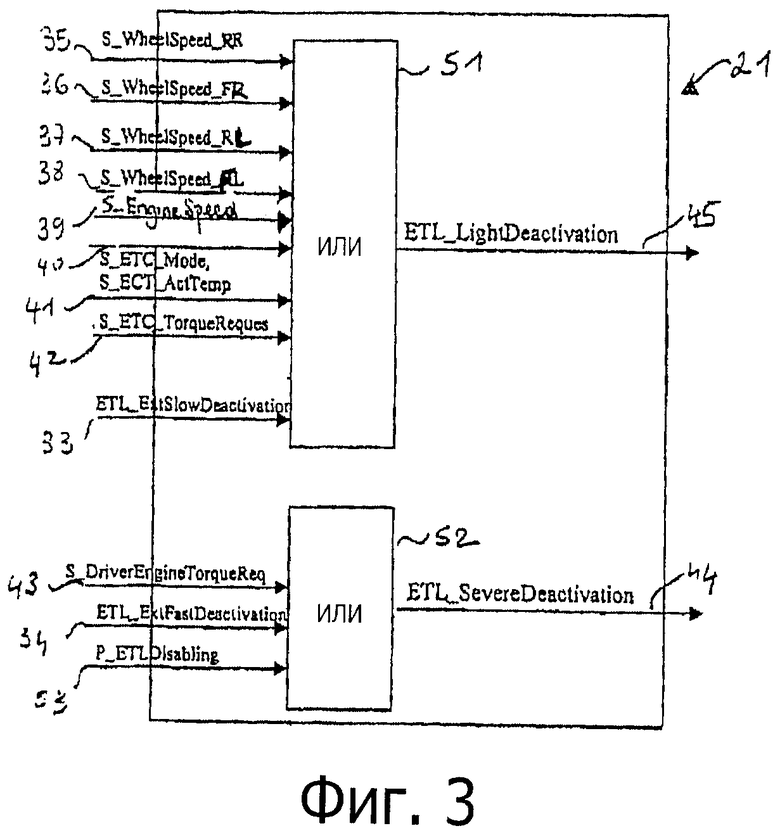
1. Система ограничения крутящего момента автотранспортного средства с системой привода с четырьмя ведущими колесами, содержащая управляемый привод, выполненный с возможностью распределения крутящего момента на ведущие колеса, вычислительные средства (1), предназначенные для вычисления по меньшей мере одной характеристической переменной работы транспортного средства и модуль (2) ограничения крутящего момента в зависимости от указанных переменных, отличающаяся тем, что модуль (2) ограничения крутящего момента содержит средства (23) выработки заданного значения ограничения крутящего момента, предназначенного для привода, и средства (21) деактивации модуля ограничения крутящего момента в зависимости от характеристических переменных работы двигателя, причем средства (21) деактивации выполнены с возможностью выработки первого сигнала деактивации для немедленной деактивации модуля ограничения крутящего момента.
2. Система по п.1, отличающаяся тем, что входные сигналы модуля ограничения крутящего момента характеризуют ситуацию вождения, с одной стороны, и состояние работы системы привода с четырьмя ведущими колесами транспортного средства, с другой стороны.
3. Система по п.1, отличающаяся тем, что содержит средство для плавного постепенного ограничения изменений крутящего момента во времени в зависимости от температуры привода.
4. Система по п.1, отличающаяся тем, что она содержит средства (22) обработки входных сигналов, выполненные с возможностью фильтрации входных сигналов и определения включенного передаточного отношения коробки передач, предназначенных для средств (23) выработки заданного значения.
5. Система по п.1, отличающаяся тем, что средство (23) выработки заданного значения содержит модуль (83) обнаружения условий ограничения, выполненный с возможностью выдачи сигналов контроля активации или деактивации модуля ограничения, и модуль (85) генерирования заданного значения, выполненный с возможностью выработки сигнала заданного значения крутящего момента.
6. Система по п.5, отличающаяся тем, что модуль (81) обнаружения условий ограничения выполнен с возможностью выдачи сигналов контроля в зависимости от значения характеристических переменных работы транспортного средства и сигналов активации и деактивации.
7. Способ ограничения крутящего момента автотранспортного средства с системой привода с четырьмя ведущими колесами, содержащей управляемый привод, выполненный с возможностью распределения крутящего момента на ведущие колеса, в котором вычисляют по меньшей мере одну характеристическую переменную работы транспортного средства и ограничивают крутящий момент в зависимости от указанных переменных, отличающийся тем, что крутящий момент задают меньший или равный заданному значению ограничения крутящего момента и осуществляют деактивацию ограничения крутящего момента в зависимости от характеристических переменных работы двигателя, причем средства деактивации предназначены для выработки первого сигнала деактивации для немедленной деактивации модуля ограничения крутящего момента и второго сигнала деактивации для постепенной деактивации модуля ограничения крутящего момента.
8. Способ по п.7, отличающийся тем, что постепенно ограничивают изменения крутящего момента в течение времени в зависимости от температуры привода.
9. Способ по п.7, отличающийся тем, что обнаруживают условия ограничения и выдают сигналы контроля активации и деактивации ограничения крутящего момента, и вырабатывают сигнал заданного значения крутящего момента.
10. Способ по п.7, отличающийся тем, что сигналы контроля выдают в зависимости от значения характеристических переменных работы транспортного средства и от сигналов активации и деактивации.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| EP1327547A2, 16.07.2003 | |||
| US6493622B1, 10.12.2002. | |||

