Предлагаемое изобретение относится к измерительной технике и может быть использовано в любой области, где необходимо определить скорость движущегося объекта и расстояние до него, в частности, для контроля рельефа подстилающей поверхности и управления режимом посадки летательного аппарата.
Известен лазерный дальномер, содержащий лазерный передатчик, приемник отраженного объектом излучения и измеритель дальности на основе измерителя временного интервала между зондирующим и отраженным целью импульсами [1].
Недостатком этого дальномера является недостаточная дальность действия при использовании полупроводникового лазера в качестве передатчика.
Наиболее близким по технической сущности к предлагаемому способу является лазерный дальномер с некогерентным накоплением отраженного сигнала [2], содержащий лазерный передатчик, приемник отраженного объектом излучения, последовательно включенные многоканальный накопитель, связанный с тактовым генератором, и измеритель дальности.
При использовании такого устройства в качестве бортового высотомера летательного аппарата (ЛА) данное устройство позволяет проводить измерения значительных высот [4], но не обладает возможностью измерения вертикальной составляющей скорости ЛА в режимах его взлета и посадки.
Задачей изобретения является обеспечение измерений с борта летательного аппарата его высоты и вертикальной составляющей скорости как в стационарном полете, так и при взлете и посадке в широком диапазоне высот и режимов подъема и снижения.
Указанная задача решается за счет того, что в известном устройстве для измерения высоты и вертикальной скорости летательного аппарата, содержащем лазерный передатчик, приемник отраженного объектом излучения, последовательно включенные многоканальный накопитель, связанный с тактовым генератором, и измеритель дальности, на выходе приемника введен коммутатор, первый выход которого соединен со входом многоканального накопителя, а на втором выходе коммутатора введены последовательно включенные блок временной фиксации и блок интерполяции, связанный с тактовым генератором, а управляющий вход коммутатора связан с бортовой системой управления полетом ЛА.
Система управления полетом ЛА может представлять собой автономную систему управления со встроенной системой навигации, например спутниковой, и задатчиком программы полета, выход которого связан с входом блока переключения режимов.
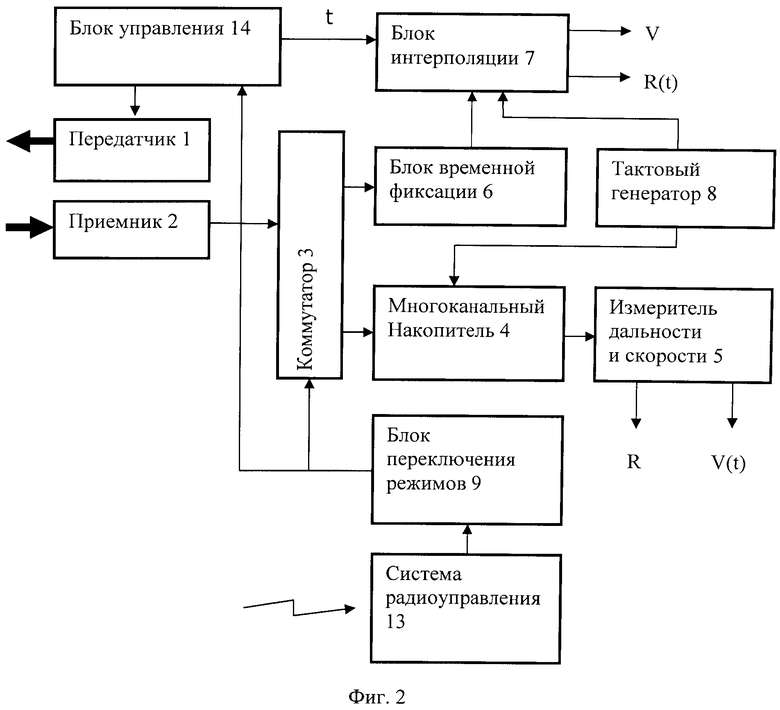
Система управления полетом ЛА может также представлять собой систему радиоуправления, связанную с наземным командным пунктом.
На фиг. 1 представлена схема устройства с автономной системой управления. На фиг. 2 - с системой радиоуправления.
Устройство содержит передатчик 1 и приемник 2, подключенный к коммутатору 3 с двумя выходами. На одном из выходов коммутатора включен многоканальный накопитель 4, связанный с измерителем дальности и скорости 5. На втором выходе коммутатора 3 включен блок временной фиксации 6, связанный с блоком интерполяции 7. Блок интерполяции и измеритель дальности синхронизируются времязадающим тактовым генератором 8. Блок переключения режимов 9 управляется от системы управления 10. Система управления может быть автономной (фиг. 1). В этом случае она состоит из системы навигации 11 (спутниковой, инерциальной, оптико-электронной и т.п.) и задатчика программы полета 12. В другом варианте (фиг. 2) система управления представляет собой систему радиоуправления 13, связанную с наземным командным пунктом. Управление режимами измерителя высоты и скорости осуществляется блоком управления 14.
При взлете ЛА коммутатор 3 переключает выход приемника 2 на вход блока временной фиксации 6. Затем производят серию зондирований подстилающей поверхности. Каждому i-му зондирующему импульсу передатчика 1 соответствует сигнал на выходе приемника, задержанный на время распространения света при его распространении между передатчиком, земной поверхностью и приемником. Величина этой задержки tj определяется блоком временной фиксации и по ней определяется высота Ri по формуле Ri=c·ti/2, где c - скорость света. По окончании серии производят линейную интерполяцию результатов измерений в виде

где R(t) - текущая дальность до объекта; t - текущее время; V - оценка скорости; R0 - оценка дальности до объекта при t=0. Значения R0 и V можно определить методом наименьших квадратов по формулам [6]


где
R0 - оценка дальности до объекта в момент времени t=0;
V - оценка скорости объекта;
Ri=c·ti/2 - результат измерения дальности до объекта в i-м зондировании;
Ti - моменты времени, в которые произведены замеры дальности Ri;
c - скорость света,
m - количество замеров дальности в серии,
ti - задержка между моментами излучения лазерного импульса и приема отраженного объектом излучения в i-м зондировании.
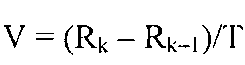
В штатном полете - система управления по команде задатчика программы полета 12 или по команде с наземного командного пункта, переданной через систему радиоуправления 13, переводит устройство в режим некогерентного накопления [2]. При этом блок переключения режимов 9 с помощью коммутатора 3 переключает выход приемника 2 на вход многоканального накопителя 4, синхронизируемого тактовым генератором 8. Накопление принимаемых сигналов продолжается до тех пор, пока не будет зафиксировано наличие отраженного сигнала. Измеритель дальности и скорости 5 анализирует массив накопленных данных, определяя положение накопленного массива относительно временной шкалы по заданному критерию [2], например по положению центра тяжести накопленного массива данных [3] или максимуму корреляционной функции 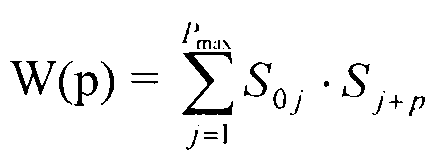 , где j - порядковый номер ячейки дальности; Pmax - максимальное число ячеек дальности, соответствующее диапазону измерения дальности; {S0j} - массив выборочных значений зондирующего импульса; {Sj} - массив накопленных значений принятых реализаций; p - текущее количество шагов при пошаговом сдвиге {Sj}. Дальность R до объекта определяется по формуле R=cPΔt/2, где c - скорость света; P - номер ячейки дальности, соответствующий положению накопленного массива; Δt - длительность тактового интервала. Скорость V в этом случае может быть определена как относительное приращение высоты R за период T между k-м и (k-1) измерениями:
, где j - порядковый номер ячейки дальности; Pmax - максимальное число ячеек дальности, соответствующее диапазону измерения дальности; {S0j} - массив выборочных значений зондирующего импульса; {Sj} - массив накопленных значений принятых реализаций; p - текущее количество шагов при пошаговом сдвиге {Sj}. Дальность R до объекта определяется по формуле R=cPΔt/2, где c - скорость света; P - номер ячейки дальности, соответствующий положению накопленного массива; Δt - длительность тактового интервала. Скорость V в этом случае может быть определена как относительное приращение высоты R за период T между k-м и (k-1) измерениями:
 .
.
При посадке ЛА подается сигнал с автономного задатчика программы полета 10 или системы радиоуправления 13 на блок переключения режимов 9 и блок управления 14. После этого выход приемника 2 вновь переключается на вход блока временной фиксации 6, и блок интерполяции 7 определяет траекторию ЛА согласно выражениям (1)-(3). Время t в выражении (1) может быть привязано к окончанию процесса измерений или экстраполировать результат измерения вперед вплоть до приземления ЛА. Данное изобретение позволяет:
- Увеличить измеряемую высоту летательного аппарата до 1000-2000 м.
- Уменьшить минимальную измеряемую высоту до 2 м.
- Обеспечить минимальный период обновления информации порядка 1 с на больших высотах и до 0,1 c - на малых.
- Обеспечить минимальную ошибку измерения скорости 0,01-0,1 м/с в зависимости от длительности серии зондирований и количества замеров в серии.
- Интерполировать результаты к любому моменту периода измерений или экстраполировать их на заданное время вперед.
Эти выводы подтверждены испытаниями макетных образцов высотомера-скоростемера [5, 6]. Тем самым подтверждено решение поставленной задачи - обеспечение измерений с борта летательного аппарата его высоты и вертикальной составляющей скорости как в стационарном полете, так и при взлете и посадке в широком диапазоне высот и режимов подъема и снижения.
Источники информации
1. В.А. Смирнов «Введение в оптическую радиоэлектронику». Изд. «Советское радио», Москва, 1973 г., С. 189.
2. В.Г. Вильнер и др. Оценка возможностей светолокационного измерителя дальности с накоплением. - Фотоника, 2007, №6, с. 22-26. - прототип.
3. Способ светолокационного определения дальности. Патент РФ №2390724.
4. Способ определения дальности и/или скорости удаленного объекта. Патент РФ №2378705.
5. Малогабаритный лазерный высотомер ДЛ-5М. Фотоника №3, 2013 г., с. 55.
6. В.Г. Вильнер и др. Пути достижения предельной точности лазерного скоростемера. - «Мир измерений» №7, 2010 г., с. 17-21.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2014 |
|
RU2560011C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ И СКОРОСТИ | 2014 |
|
RU2562147C1 |
| Бортовой лазерный дальномер с определением высоты нижнего края облачности | 2020 |
|
RU2737592C1 |
| Устройство обеспечения безопасности пилотирования в условиях облачности с оценкой возможности посадки на водоем со снежно-ледяным покровом | 2024 |
|
RU2821159C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛА | 2014 |
|
RU2563607C1 |
| СПОСОБ ОЦЕНКИ ДАЛЬНОСТИ И СКОРОСТИ УДАЛЕННОГО ОБЪЕКТА | 2014 |
|
RU2563608C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ И СКОРОСТИ УДАЛЕННОГО ОБЪЕКТА | 2014 |
|
RU2562148C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2200900C2 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2558694C1 |
Изобретение относится к устройству для автоматического определения высоты и вертикальной скорости летательного аппарата. Устройство содержит лазерный передатчик, приемник отраженного объектом излучения, последовательно включенные многоканальный накопитель, связанный с тактовым генератором, и измеритель дальности. На выходе приемника введен коммутатор, первый выход которого соединен со входом многоканального накопителя, а на втором выходе коммутатора введены последовательно включенные блок временной фиксации и блок интерполяции, связанный с тактовым генератором, а управляющий вход коммутатора связан с бортовой системой управления полетом ЛА. Технический результат изобретения заключается в обеспечении измерений с борта летательного аппарата его высоты и вертикальной составляющей скорости как в стационарном полете, так и при взлете и посадке в широком диапазоне высот и режимов подъема и снижения. 2 з.п. ф-лы, 2 ил.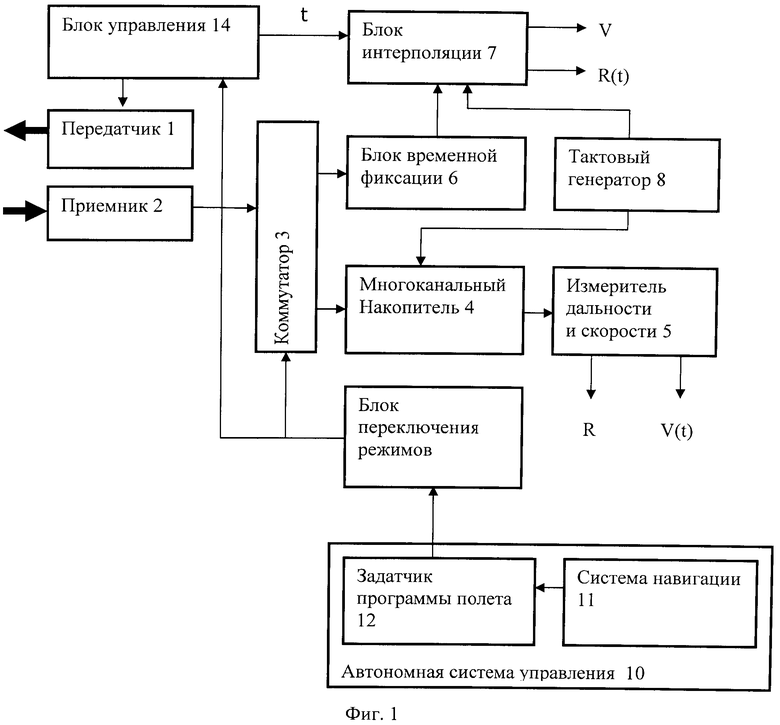
1. Устройство для измерения высоты и вертикальной скорости летательного аппарата, содержащее лазерный передатчик, приемник отраженного объектом излучения, последовательно включенные многоканальный накопитель, связанный с тактовым генератором, и измеритель дальности, отличающееся тем, что на выходе приемника введен коммутатор, первый выход которого соединен со входом многоканального накопителя, а на втором выходе коммутатора введены последовательно включенные блок временной фиксации и блок интерполяции, связанный с тактовым генератором, а управляющий вход коммутатора связан с бортовой системой управления полетом ЛА.
2. Устройство по п. 1, отличающееся тем, что система управления полетом ЛА представляет собой автономную систему управления со встроенной системой навигации, например инерционной, и задатчиком маршрута, выход которого связан с входом блока переключения режимов.
3. Устройство по п. 1, отличающееся тем, что система управления полетом ЛА представляет собой систему радиоуправления, связанную с наземным командным пунктом.
| СПОСОБ ЛАЗЕРНОГО ЗОНДИРОВАНИЯ УДАЛЕННОГО ОБЪЕКТА | 2007 |
|
RU2352903C1 |
| US 7791713 B2 07.09.2010 | |||
| EP 1912078 B1 24.07.2013 | |||
| Устройство для защиты инструмента при глубоком сверлении | 1976 |
|
SU582086A2 |
| US 20120261516 A1 18.10.2012 | |||

