Предлагаемое изобретение относится к измерительной технике и может быть использовано в любой области, где необходимо определить скорость движущегося объекта и расстояние до него, в частности, для контроля рельефа подстилающей поверхности и управления режимом посадки летательного аппарата.
Известен лазерный дальномер, содержащий лазерный передатчик, приемник отраженного объектом излучения и измеритель дальности на основе измерителя временного интервала между зондирующим и отраженным целью импульсами [1].
Недостатком этого дальномера является ограниченная дальность действия при использовании полупроводникового лазера в качестве передатчика.
Наиболее близким по технической сущности к предлагаемому способу является лазерный дальномер с некогерентным накоплением отраженного сигнала [2], содержащий лазерный передатчик, приемник отраженного объектом излучения, последовательно включенные многоканальный накопитель, связанный с тактовым генератором, и измеритель дальности.
Данное устройство позволяет проводить измерения значительных высот [5], но не обладает возможностью измерения вертикальной составляющей скорости ЛА в режимах его взлета и посадки.
Задачей изобретения является обеспечение измерений с борта летательного аппарата его высоты и вертикальной составляющей скорости как в стационарном полете, так и при взлете и посадке в широком диапазоне высот и режимов подъема и снижения.
Указанная задача решается за счет того, что в известном лазерном дальномере, содержащем лазерный передатчик, приемник отраженного объектом излучения, последовательно включенные многоканальный накопитель, связанный с тактовым генератором, и измеритель дальности, на выходе приемника введен коммутатор, первый выход которого соединен со входом многоканального накопителя, а на втором выходе коммутатора введены последовательно включенные блок временной фиксации и блок интерполяции, связанный с тактовым генератором, а между дополнительным выходом многоканального накопителя и управляющим входом коммутатора введен блок переключения режимов, причем многоканальный накопитель состоит из последовательно включенных многоуровневого аналого-цифрового преобразователя (АЦП) и многоканального цифрового накопителя (ЦН), связанных с тактовым генератором, а выход многоуровневого АЦП, соответствующий порогу S0, подключен ко входу блока переключения режимов, где порог S0 - уровень сигнала, при котором обеспечивается заданная вероятность правильного обнаружения сигнала при заданной вероятности ложной тревоги в режиме моноимпульсного зондирования.
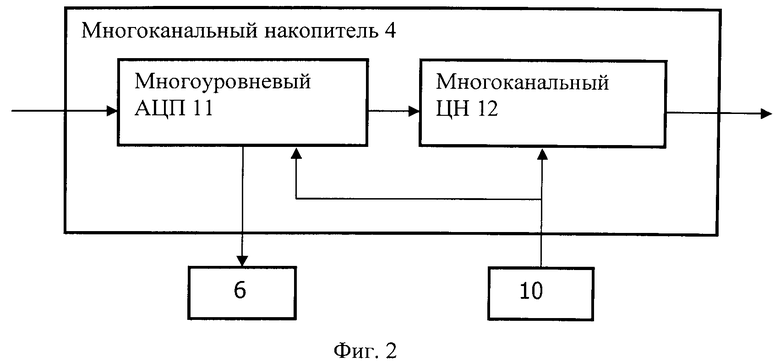
На фиг. 1 представлена схема дальномера-скоростемера, реализующего предлагаемый способ. На фиг. 2 показана структура многоканального накопителя 4.
Устройство содержит передатчик 1 и приемник 2, подключенный к коммутатору 3 с двумя выходами. На одном из выходов коммутатора включен многоканальный накопитель 4, связанный с измерителем дальности 5. Между выходом измерителя дальности и управляющим входом коммутатора включен блок переключения режимов 6, связанный также с блоком управления 7. На втором выходе коммутатора 3 включен блок временной фиксации 8, связанный с блоком интерполяции 9. Блок интерполяции и измеритель дальности синхронизируются времязадающим тактовым генератором 10. Многоканальный накопитель 4 содержит последовательно включенные многоуровневый аналого-цифровой преобразователь (АЦП) 11 и многоканальный цифровой накопитель (ЦН) 12. АЦП и ЦН связаны с тактовым генератором 10. Второй выход АЦП связан со входом блока переключения режимов 6.
В полетном режиме в начале процесса измерений высоты и дальности летательного аппарата по команде с блока управления 7 коммутатор 3 переключает выход приемника 2 на свой первый выход, тем самым обеспечивая работу многоканального накопителя 4, синхронизируемого тактовым генератором 10. Момент излучения передатчиком 1 зондирующего импульса фиксируется в качестве начала временной шкалы, задаваемой тактовым генератором. Каждый такт нумеруется в многоканальном накопителе 4, образуя ячейку дальности, привязанную к текущему времени. Отраженный целью импульс излучения поступает на приемник 2 с задержкой tR=2R/c, где R - дальность до цели, а c - скорость света. АЦП преобразует аналоговый сигнал с выхода приемника в цифровую форму [2] для последующей обработки в многоканальном ЦН 12, причем помимо одного или более уровней квантования, необходимых для аналого-цифрового преобразования сигнала, существует пороговый уровень S0 для формирования управляющего сигнала для блока переключения режимов 6. Если этот порог не превышен, то дальнейшая работа устройства происходит по методу некогерентного многоканального накопления [2] до тех пор, пока положение сигнала tR на шкале времени не будет установлено с необходимой вероятностью. Измеритель дальности анализирует массив накопленных данных, определяя положение накопленного массива относительно временной шкалы по заданному критерию [2], например по положению центра тяжести накопленного массива данных [3] или максимуму корреляционной функции 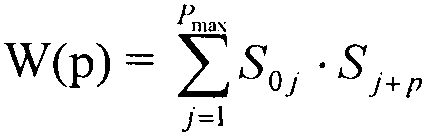 , где j - порядковый номер ячейки дальности; Pmax - максимальное число ячеек дальности, соответствующее диапазону измерения дальности; {S0j} - массив выборочных значений зондирующего импульса; {Sj} - массив накопленных значений принятых реализаций; p - текущее количество шагов при пошаговом сдвиге {Sj}. Дальность R до объекта определяется по формуле R=cPΔt/2, где c - скорость света; P - номер ячейки дальности, соответствующий положению накопленного массива; Δt - длительность тактового интервала. Скорость V в этом случае может быть определена как относительное приращение высоты R за период T между j-м и (j-1)-м измерениями:
, где j - порядковый номер ячейки дальности; Pmax - максимальное число ячеек дальности, соответствующее диапазону измерения дальности; {S0j} - массив выборочных значений зондирующего импульса; {Sj} - массив накопленных значений принятых реализаций; p - текущее количество шагов при пошаговом сдвиге {Sj}. Дальность R до объекта определяется по формуле R=cPΔt/2, где c - скорость света; P - номер ячейки дальности, соответствующий положению накопленного массива; Δt - длительность тактового интервала. Скорость V в этом случае может быть определена как относительное приращение высоты R за период T между j-м и (j-1)-м измерениями:
V=(Rj-Rj-1)/T.
Если в многоуровневом АЦП будет отмечено превышение порога S0, то на коммутатор 3 подается сигнал, переключающий выход приемника на второй выход коммутатора, и дальнейшая работа устройства производится в моноимпульсном режиме с линейной интерполяцией результатов измерений в виде R(t)=Vt+R0, где R(t) - текущая дальность до объекта; t - текущее время; V - оценка скорости; R0 - оценка дальности до объекта при t=0.
 ,
,
 ,
,
где
R0 - оценка дальности до объекта в момент времени t=0;
V - оценка скорости объекта;
Ri=c·ti/2 - результат измерения дальности до объекта в i-м зондировании;
Ti - моменты времени, в которые произведены замеры дальности Ri;
c - скорость света,
m - количество замеров дальности в серии.
ti - задержка между моментами излучения лазерного импульса и приема отраженного объектом излучения в i-м зондировании.
Оценка дальности может быть выдана для любого момента времени t, в том числе для момента окончания серии зондирований t=Tm.
Данное изобретение позволяет:
- увеличить измеряемую высоту летательного аппарата до 1000-2000 м;
- уменьшить минимальную измеряемую высоту до 2 м;
- обеспечить минимальный период обновления информации порядка 1 с на больших высотах и до 0,1 с - на малых;
- обеспечить минимальную ошибку измерения скорости 0,01-0,1 м/с в зависимости от длительности серии зондирований и количества замеров в серии;
- интерполировать результаты к любому моменту периода измерений или экстраполировать их на заданное время вперед.
Эти выводы подтверждены испытаниями макетных образцов высотомера-скоростемера [5, 6]. Тем самым подтверждено решение поставленной задачи - обеспечение измерений с борта летательного аппарата его высоты и вертикальной составляющей скорости как в стационарном полете, так и при взлете и посадке в широком диапазоне высот и режимов подъема и снижения.
Источники информации
1. В.А. Смирнов. Введение в оптическую радиоэлектронику. М.: Советское радио, 1973. С. 189.
2. В.Г. Вильнер и др. Оценка возможностей светолокационного измерителя дальности с накоплением. Фотоника, 2007, №6. С. 22-26. Прототип.
3. Способ светолокационного определения дальности. Патент РФ №2390724.
4. Способ определения дальности и/или скорости удаленного объекта. Патент РФ №2378705.
5. Малогабаритный лазерный высотомер ДЛ-5М. Фотоника, 2013, № 3. С. 55.
6. В.Г. Вильнер и др. Пути достижения предельной точности лазерного скоростемера. Мир измерений, 2010, №7. С. 17-21.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2014 |
|
RU2560011C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2562150C1 |
| Бортовой лазерный дальномер с определением высоты нижнего края облачности | 2020 |
|
RU2737592C1 |
| Устройство обеспечения безопасности пилотирования в условиях облачности с оценкой возможности посадки на водоем со снежно-ледяным покровом | 2024 |
|
RU2821159C1 |
| СПОСОБ ОЦЕНКИ ДАЛЬНОСТИ И СКОРОСТИ УДАЛЕННОГО ОБЪЕКТА | 2014 |
|
RU2563608C1 |
| Лазерный дальномер | 2017 |
|
RU2650851C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ И СКОРОСТИ УДАЛЕННОГО ОБЪЕКТА | 2014 |
|
RU2562148C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2558694C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2011 |
|
RU2469269C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛА | 2014 |
|
RU2563607C1 |
Изобретение относится к измерительной технике определения высоты и вертикальной скорости летательного аппарата. Устройство обеспечивает возможность работы в двух режимах. Сигнал от источника направляется на объект, и приемник излучения фиксирует отраженный от объекта сигнал. От приемника излучения посредством коммутатора сигнал передается на многоканальный цифровой накопитель. При этом отслеживается достижение накопленным сигналом установленного уровня. Если сигнал не достигает установленного уровня, то работа устройства производится по методу некогерентного многоканального накопления. Если будет отмечено превышение порога, то работа устройства производится в моноимпульсном режиме. Технический результат изобретения заключается в обеспечении измерений с борта летательного аппарата его высоты и вертикальной составляющей скорости как в стационарном полете, так и при взлете и посадке в широком диапазоне высот и режимов подъема и снижения. 2 ил.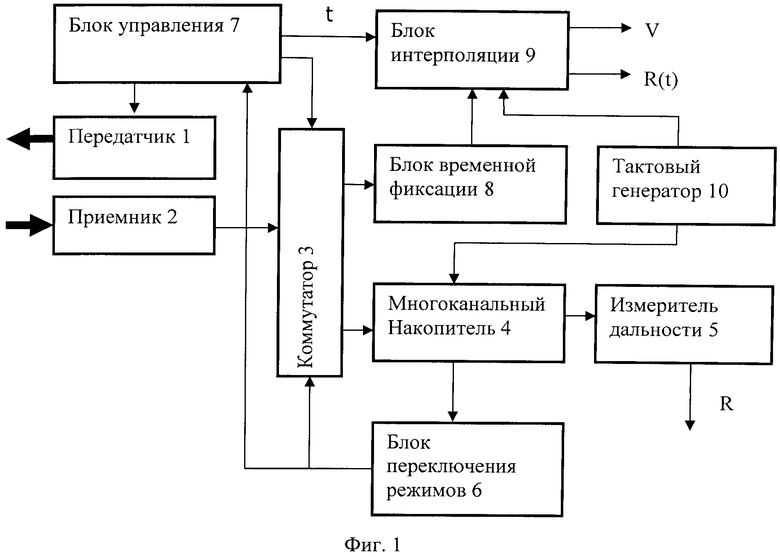
Устройство для определения дальности и скорости, содержащее лазерный передатчик, приемник отраженного объектом излучения, последовательно включенные многоканальный накопитель, связанный с тактовым генератором, и измеритель дальности, отличающееся тем, что на выходе приемника введен коммутатор, первый выход которого соединен со входом многоканального накопителя, а на втором выходе коммутатора введены последовательно включенные блок временной фиксации и блок интерполяции, связанный с тактовым генератором, а между дополнительным выходом многоканального накопителя и управляющим входом коммутатора введен блок переключения режимов, причем многоканальный накопитель состоит из последовательно включенных многоуровневого аналого-цифрового преобразователя (АЦП) и многоканального цифрового накопителя (ЦН), связанных с тактовым генератором, а выход многоуровневого АЦП, соответствующий порогу S0, подключен ко входу блока переключения режимов, где порог S0 - уровень сигнала, при котором обеспечивается заданная вероятность правильного обнаружения сигнала при заданной вероятности ложной тревоги в режиме моноимпульсного зондирования.
| US 20130235365 A1 12.09.2013 | |||
| US 20120185209 A1 19.07.2012 | |||
| US 3900261 A1 19.08.1975 | |||
| СПОСОБ НЕКОГЕРЕНТНОГО НАКОПЛЕНИЯ СВЕТОЛОКАЦИОННЫХ СИГНАЛОВ | 2011 |
|
RU2455615C1 |

