Изобретение относится к измерительной технике и может быть использовано для повышения безопасности пилотирования в условиях облачности с оценкой возможности посадки на водоем со снежно-ледяным покровом.
Известен лазерный дальномер - патент РФ №2560011, кл. G01C 3/08, 2015. Лазерный дальномер содержит лазерный передатчик, приемник отраженного объектом излучения, последовательно включенные многоканальный накопитель, связанный с тактовым генератором, и измеритель дальности, отличающийся тем, что на выходе приемника введен коммутатор, первый выход которого соединен со входом многоканального накопителя, а на втором выходе коммутатора введены последовательно включенные блок временной фиксации и блок интерполяции, связанный с тактовым генератором, а между управляющим входом коммутатора и выходами измерителя дальности и блока интерполяции введен блок переключения режимов.
Несмотря на то, что лазерные лучи имеют свойство отражаться от неоднородных поверхностей, в том числе и от неоднородностей атмосферы, данный лазерный дальномер не обеспечивает определение высоты нижнего края облачности над землей с борта летательного аппарата, а определяет только высоту летательного аппарата над земной или водной поверхностью. При выполнении полетов в облачности, особенно перед посадкой, пилоту необходимо знание расстояния нижнего края облачности над земной или водной поверхностью. Известный лазерный дальномер определяет расстояние от летательного аппарата только до земли, поэтому не обеспечивает необходимый уровень обеспечения безопасности полетов.
Наиболее близким аналогом по техническому решению является бортовой лазерный дальномер с определением высоты нижнего края облачности - патент РФ №2737592 кл. G01C 3/08, 2020. Бортовой лазерный дальномер содержит лазерный передатчик, приемник отраженного объектом излучения, коммутатор, многоканальный накопитель, измеритель дальности, блок переключения режимов, блок управления, блок временной фиксации, блок интерполяции, тактовый генератор, первый выход которого соединен с третьим входом блока интерполяции, а второй выход - со вторым входом многоканального накопителя, выход последнего подключен ко входу измерителя дальности, выход которого соединен со вторым входом блока переключения режимов, первый вход которого подключен ко второму выходу блока интерполяции, первый вход последнего соединен с третьим выходом блока управления, первый и второй выходы которого подключены ко входу лазерного передатчика и второму входу коммутатора, соответственно, первый и второй выходы последнего соединены со входом блока временной фиксации и первым входом многоканального накопителя, соответственно, выход приемника отраженного объекта излучения подключен к первому входу коммутатора, третий вход которого соединен с входом блока управления и выходом блока переключения режимов, отличающийся тем, что в него введены дополнительный блок интерполяции, определитель количества импульсов, первый ключ и второй ключ, выход последнего соединен со вторым входом дополнительного блока интерполяции, первый и третий входы которого подключены к третьему выходу блока управления и первому выходу тактового генератора, соответственно, первые входы первого и второго ключей соединены с выходом блока временной фиксации и входом определителя количества импульсов, первый выход которого подключен ко второму входу второго ключа, а второй выход определителя количества импульсов соединен со вторым входом первого ключа, выход которого подключен ко второму входу блока интерполяции.
Данное устройство позволяет определять расстояние (высоты) нижнего края облачности над земной или водной поверхностью, что обеспечивает пилота летательного аппарата необходимой информацией для безопасного продолжения полета или снижения. Однако, нередко, в условиях облачности на малых высотах требуется осуществить посадку летательного аппарата на водоем со снежно-ледяным покровом. Данное устройство не позволяет в условиях облачности на малых высотах оценить возможность посадки летательного аппарата на водоем со снежно-ледяным покровом, что не соответствует необходимому уровню обеспечения безопасности полетов и посадки летательного аппарата.
Технической задачей изобретения является повышение безопасности пилотирования летательного аппарата в условиях облачности на малых высотах с оценкой возможности посадки летательного аппарата на водоем со снежно-ледяным покровом.
Технический результат достигается тем, что в устройство обеспечения безопасности пилотирования в условиях облачности с оценкой возможности безопасной посадки на водоем со снежно-ледяным покровом, содержащее лазерный передатчик, приемник отраженного объектом излучения, коммутатор, многоканальный накопитель, измеритель дальности, блок переключения режимов, блок управления, блок временной фиксации, блок интерполяции, дополнительный блок интерполяции, определитель количества импульсов, первый и второй ключи, тактовый генератор, первый выход которого соединен с третьим входом блока интерполяции, а второй выход - с вторым входом многоканального накопителя, выход последнего подключен ко входу измерителя дальности, выход которого соединен с вторым входом блока переключения режимов, первый вход которого подключен ко второму выходу блока интерполяции, первый вход последнего соединен с третьим выходом блока управления, первый и второй выходы которого подключены ко входу лазерного передатчика и второму входу коммутатора соответственно, первый и второй выходы последнего соединены с входом блока временной фиксации и первым входом многоканального накопителя, соответственно, выход приемника отраженного объекта излучения подключен к первому входу коммутатора, третий вход которого соединен с входом блока управления и выходом блока переключения режимов, выход второго ключа соединен с вторым входом дополнительного блока интерполяции, первый и третий входы которого подключены к третьему выходу блока управления и первому выходу тактового генератора, соответственно, первые входы первого и второго ключей соединены с выходом блока временной фиксации и входом определителя количества импульсов, первый выход которого подключен к второму входу второго ключа, а второй выход определителя количества импульсов соединен с вторым входом первого ключа, выход которого подключен ко второму входу блока интерполяции, дополнительно введены передающее локаторное устройство, приемное локаторное устройство, блок базы данных и третий ключ, первый вход которого соединен с выходом блока временной фиксации, второй вход соединен с третьим выходом определителя количества импульсов, а выход соединен с четвертым входом дополнительного блока интерполяции, пятый вход которого соединен с выходом первого ключа, а шестой вход соединен с выходом блока базы данных, вход которого соединен с третьим выходом блока управления, четвертый выход которого соединен с входом передающего локаторного устройства, а выход приемного локаторного устройства с четвертым входом коммутатора.
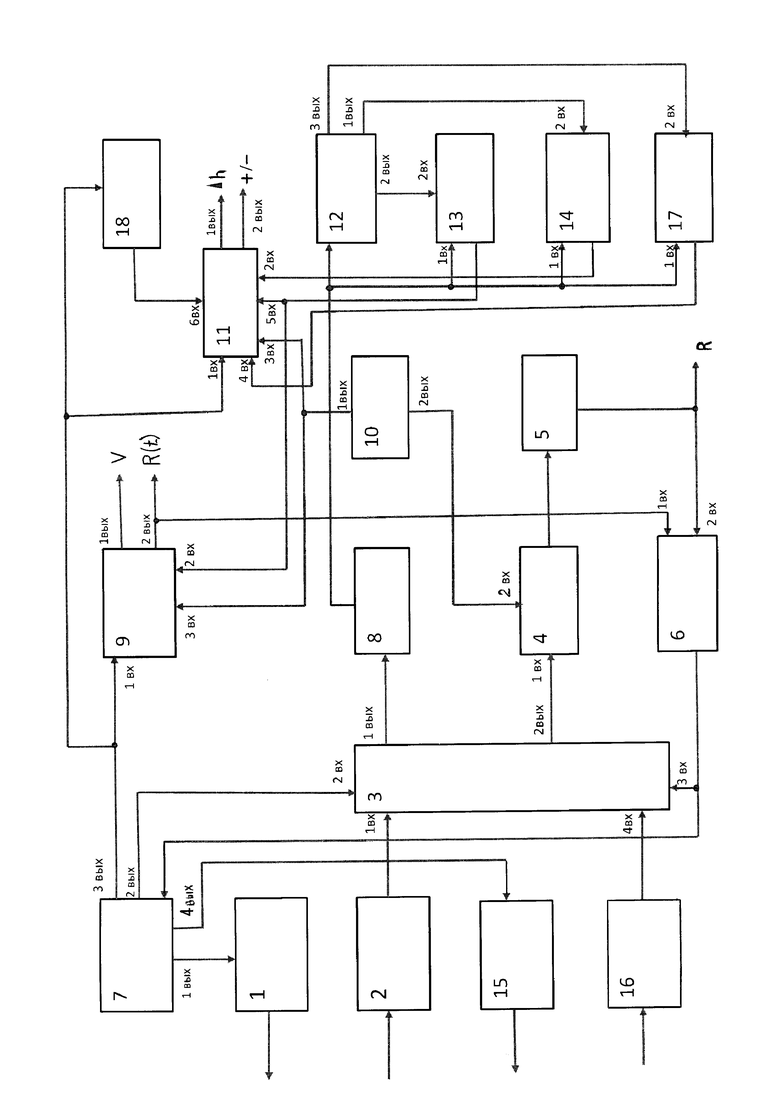
Сущность изобретения поясняется структурной схемой устройства обеспечения безопасности пилотирования в условиях облачности с оценкой возможности посадки на водоем со снежно-ледяным покровом.
Устройство содержит лазерный передатчик 1, приемник 2 отраженного объектом излучения, коммутатор 3, многоканальный накопитель 4, измеритель 5 дальности, блок 6 переключения режимов, блок 7 управления, блок 8 временной фиксации, блок 9 интерполяции, тактовый генератор 10, дополнительный блок 11 интерполяции, определитель 12 количества импульсов, первый ключ 13, второй ключ 14, передающее локаторное устройство 15, приемное локаторное устройство 16, третий ключ 17, блок 18 базы данных, выход второго ключа 14 соединен с вторым входом дополнительного блока 11 интерполяции, первый и третий входы которого подключены к третьему выходу блока 7 управления и первому выходу тактового генератора 10, соответственно, первые входы первого 13 и второго 14 ключей соединены с выходом блока 8 временной фиксации и входом определителя 12 количества импульсов, первый выход которого подключен ко второму входу второго ключа 14, а второй выход определителя 12 количества импульсов соединен с вторым входом первого ключа 13, выход которого подключен ко второму входу блока 9 интерполяции, первый выход тактового генератора 10 соединен с третьим входом блока 9 интерполяции, а второй выход - с вторым входом многоканального накопителя 4, выход последнего подключен ко входу измерителя 5 дальности, выход которого соединен с вторым входом блока 6 переключения режимов, первый вход которого подключен ко второму выходу блока 9 интерполяции, первый вход последнего соединен с третьим выходом блока 7 управления, первый и второй выходы которого подключены к входу передатчика 1 и второму входу коммутатора 3, соответственно, первый и второй выходы последнего соединены с входом блока 8 временной фиксации и первым входом многоканального накопителя 4, соответственно, выход приемника 2 отраженного объектом излучения подключен к первому входу коммутатора 3, третий вход которого соединен с входом блока 7 управления и выходом 6 блока переключения режимов, первый вход третьего ключа 17 соединен с выходом блока 8 временной фиксации, второй вход соединен с третьим выходом определителя 12 количества импульсов, а выход соединен с четвертым входом дополнительного блока 11 интерполяции, пятый вход которого соединен с выходом первого ключа 13, а шестой вход соединен с выходом блока 18 базы данных, вход которого соединен с третьим выходом блока 7 управления, четвертый выход которого соединен с входом передающего локаторного устройства 15, а выход приемного локаторного устройства 16 соединен с четвертым входом коммутатора 3
Устройство работает следующим образом. В начале процесса измерений высоты и дальности летательного аппарата по команде с блока 7 управления коммутатор 3 переключает выход приемника 2 на вход блока 8 временной фиксации. Блок 8 осуществляет фиксацию времени появления отраженных импульсов. При отсутствии облачности на периоде следования импульсов передатчика 1 появляется только одна временная отметка отраженного от земной или водной поверхности импульса. Этот импульс поступает на вход определителя 12 количества импульсов со второго выхода которого поступает сигнал, открывающий первый ключ 13 и обеспечивающий передачу сигнала с блока 8 на блок 9 интерполяции. В этом случае процесс определения дальности и вертикальной скорости определяется в соответствии с алгоритмом прототипа, то есть блок 9 вычисляет вертикальную скорость и высоту летательного аппарата. В моменты времени Тi производят серию измерений дальности в моноимпульсном режиме. Количество m зондирований определяется заданным периодом обновления информации и требованиями по точности. Оценки дальности R0 до объекта в начальный момент измерения и скорости V объекта формируются в блоке 9 интерполяции по формулам:
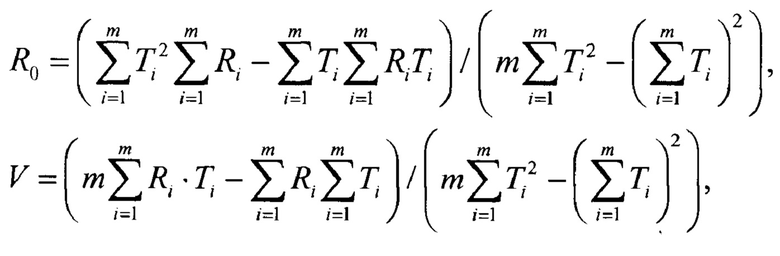
где R0 - оценка дальности до объекта в момент времени Т1; V - оценка скорости объекта; Ri=c⋅ti/2 - результат измерения дальности до объекта в i-м зондировании; Ti - моменты времени, в которые произведены замеры дальности Ri; с - скорость света; m - количество замеров дальности в серии; ti - задержка между моментами излучения лазерного импульса и приема отраженного объектом излучения в i-м зондировании.
Дальность R до объекта и его относительная скорость V определяются в блоке 9 путем линейной интерполяции результатов измерений в виде R(t)=Vt+R0, где R(t) -текущая дальность до объекта; t - текущее время, отсчитываемое от начала серии зондирований; V - оценка скорости; R0 - оценка дальности до объекта при t=0. Оценка дальности может быть определена для любого момента времени t, в том числе для момента окончания серии зондирований t=Tm. Эта оценка подается со второго выхода блока 9 интерполяции на первый вход блока 6 переключения режимов.
Если в какой-то момент измеренное значение R начинает превышать заданную величину Rmax, то блок 6 переключает выход коммутатора 3 на вход многоканального накопителя 4, синхронизируемого тактовым генератором 10, и производится серия зондирований цели по методу некогерентного накопления. По окончании процесса накопления, то есть по достижении накопленной суммой необходимого уровня хотя бы в одной ячейке дальности, измеритель дальности анализирует массив накопленных данных, определяя положение накопленного массива относительно временной шкалы по установленному критерию, например по максимуму корреляционной функции:
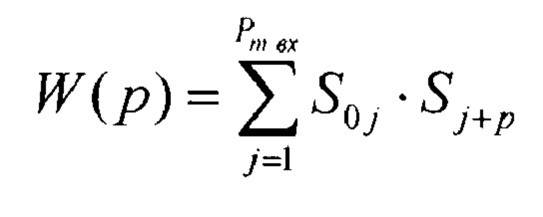
где j - порядковый номер ячейки дальности; Pmax - максимальное число ячеек дальности, соответствующее диапазону измерения дальности; {S0j} - массив выборочных значений зондирующего импульса; {Sj} - массив накопленных значений принятых реализаций; р - текущее количество шагов при пошаговом сдвиге {Sj}. Затем измеритель дальности 5 определяет дальность R по формуле:
R=cPΔt/2
где с - скорость света; Р - номер ячейки дальности, соответствующий положению накопленного массива; Δt - длительность тактового интервала.
Вертикальная составляющая скорости V в этом случае может быть определена как относительное приращение высоты R за период Т между j-м и (j-1)-м измерениями V=(Rj-Rj-1)/T.
Если измеренная дальность R больше предварительно заданного значения Rmax, определяемого полетным заданием летательного аппарата, то измерения продолжаются в описанном режиме. При посадке летательного аппарата, то есть когда R<R0, блок переключения режимов переключает коммутатор на выход, связанный с блоком временной фиксации, и измерения проводятся в описанном выше моноимпульсном режиме.
В случае наличия облачности лазерный луч, направленный вниз с летательного аппарата, претерпевает два отражения. Первое отражение от границы раздела двух сред облако-воздух. Второе отражение от границы раздела двух сред воздух-земля (вода). В этом случае блок 8 временной фиксации фиксирует два отраженных импульса. Эти импульсы поступают на вход определителя 12 количества импульсов с первого выхода которого поступает разрешающий сигнал на второй вход второго ключа 14 с выхода которого последовательность этих импульсов поступает на второй вход дополнительного блока 11 интерполяции. Блок 11 осуществляет расчет высоты нижнего края облачности над водной или земной поверхностью по формуле:
Δh=Rimax-Rimin=(c⋅timax/2)-(c⋅timin/2),
где Rimax - расстояние от летательного аппарата до земной или водной поверхности; Rimin - расстояние от летательного аппарата до границы раздела двух сред облако-воздух; timax - время прихода отраженного лазерного луча от границы раздела двух сред облако-воздух после выдачи импульса с передатчика 1; timin - время прихода отраженного лазерного луча от границы раздела двух сред облако-воздух после выдачи импульса с выхода передатчика 1.
Таким образом, устройство обеспечивает пилоту необходимую информацию по нижней зоне облачности. Одновременно со снижением летательного аппарата блок 7 управления по четвертому выходу активизирует работу передающего локаторного устройства 15. Перед посадкой на водоем со снежно-ледяным покровом осуществляется зондирование места посадки модулированным сигналом, сформированном в передающем локаторном устройстве 15. Принятый эхо-сигнал от элементов снежно-ледяного покрова на расстоянии R, имеет временную задержку τ, определяемую выражением τ=2R/Сcp, где Сср - скорость распространения электромагнитной волны в среде. Частотная составляющая биения ƒ6 непосредственно связана с задержкой эхо-сигнала f6=ƒпрд-ƒпрд=α⋅τ=2RB/СcpTлчм, где В - ширина полосы пропускания ЛЧМ сигнала.
При посадке на снежно-грунтовую поверхность в момент зондирования приемное локаторное устройство 16 выдаст на коммутатор 3 два эхо-сигнала, первый от поверхности снежного покрова, второй от грунтовой поверхности. При посадке на водоем будут сформированы три сигнала, первый от поверхности снежного покрова, второй от ледяного покрова, третий - от водной поверхности. Сигналы через коммутатор 3 и блок 8 временной фиксации поступают на вход определителя 12 количества импульсов. При поступлении первого импульса на вход определителя 12 количество импульсов на его втором выходе формируется разрешающий сигнал, открывающий первый ключ 13 и импульс приходит на пятый вход дополнительного блока 11 интерполяции. Этот импульс формируется при отражении от снежного покрова. При поступлении второго импульса на вход определителя 12 количество импульсов на его первом выходе формируется разрешающий сигнал, открывающий второй ключ 14 и импульс поступает на второй вход дополнительного блока 11интерполяциии. Этот импульс формируется при отражении от ледяного покрова. При приходе третьего импульса определитель 12 количества импульсов по третьему выходу формирует разрешающий сигнал на открытие третьего ключа 17 и импульс поступает на четвертый вход дополнительного блока 11 интерполяции. Формирование третьего импульса происходит от водной поверхности. В дополнительном блоке 11 интерполяции производится вычисление глубины снежного покрова по разности времени прихода первого и второго импульсов, по разности времени прихода второго и третьего импульсов вычисляется толщина ледяного покрова по формуле:
R=fб⋅Сср⋅Тлчм/2⋅В
где Сср - скорость электромагнитных волн в среде (в тропосфере Стр=300 м/мкс, в сухом снегу Ссс=227…279 м/мкс, во льду сл=170…179 м/мкс, определяемая температурой окружающей среды t).
В дополнительном блоке 11 интерполяции производятся вычисления глубины снежного и толщины ледяного покровов и сравниваются с пороговыми значениями с поступающими по шестому входу из блока 18 базы данных. В памяти блока 18 заложена таблица допустимых значений снежного и ледяного покровов для заданного летательного аппарата с учетом его весовых характеристик, типа шасси, времени, времени суток, температуры окружающей среды. Общее управление работой обеспечивает блок 7 посредством второго, третьего и четвертого выходов. При превышении измеренных дополнительным блоком 11 интерполяции параметров допустимым значениям формируется по второму выходу запрещающий сигнал. В случае отсутствия превышения формируется разрешающий на посадку сигнал. Сигналы (+/-) передаются на световую или звуковую индикацию экипажу.
Введение в состав изобретения устройств 15 и 16, ключа 17 и блока 18 позволило повысить безопасность пилотирования и посадки летательного аппарата в условиях облачности на малых высотах благодаря оценке возможности посадки летательного аппарата на водоем со снежно-ледяным покровом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бортовой лазерный дальномер с определением высоты нижнего края облачности | 2020 |
|
RU2737592C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ И СКОРОСТИ | 2014 |
|
RU2562147C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2014 |
|
RU2560011C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2562150C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ЛЕДЯНОГО ПОКРОВА | 2010 |
|
RU2449326C2 |
| УСТРОЙСТВО ВЫБОРА ПЛОЩАДКИ ДЛЯ ПОСАДКИ ВОЗДУШНОГО СУДНА ВЕРТОЛЁТНОГО ТИПА | 2020 |
|
RU2756596C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2007 |
|
RU2363009C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ, ВЫСОТЫ И МЕСТНОЙ ВЕРТИКАЛИ ДЛЯ ВЕРТОЛЕТОВ И КОСМИЧЕСКИХ АППАРАТОВ ВЕРТИКАЛЬНОЙ ПОСАДКИ | 1995 |
|
RU2083998C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2574167C1 |
Изобретение относится к измерительной технике и может быть использовано для повышения безопасности пилотирования в условиях облачности с проведением оценки возможности посадки на водоем со снежно-ледяным покровом. Заявленное устройство обеспечения безопасности пилотирования в условиях облачности с оценкой возможности посадки на водоем со снежно-ледяным покровом содержит лазерный передатчик 1, приемник 2 отраженного объектом излучения, коммутатор 3, многоканальный накопитель 4, измеритель 5 дальности, блок 6 переключения режимов, блок 7 управления, блок 8 временной фиксации, блок 9 интерполяции, тактовый генератор 10, дополнительный блок 11 интерполяции, определитель 12 количества импульсов, первый ключ 13, второй ключ 14, передающее локаторное устройство 15, приемное локаторное устройство 16, третий ключ 17, блок 18 базы данных. Технический результат – повышение безопасности пилотирования летательного аппарата в условиях облачности на малых высотах с оценкой возможности посадки летательного аппарата на водоем со снежно-ледяным покровом. 1 ил.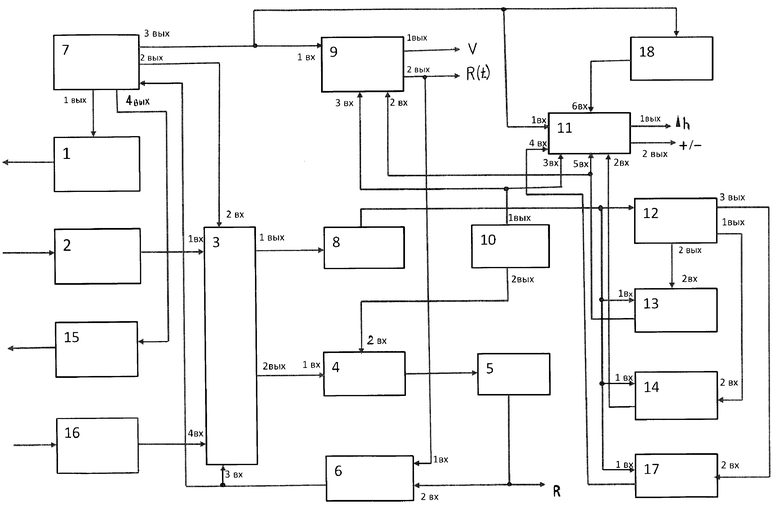
Устройство обеспечения безопасности пилотирования в условиях облачности с оценкой возможности безопасной посадки на водоем со снежно-ледяным покровом, содержащее лазерный передатчик, приемник отраженного объектом излучения, коммутатор, многоканальный накопитель, измеритель дальности, блок переключения режимов, блок управления, блок временной фиксации, блок интерполяции, дополнительный блок интерполяции, определитель количества импульсов, первый и второй ключи, тактовый генератор, первый выход которого соединен с третьим входом блока интерполяции, а второй выход - с вторым входом многоканального накопителя, выход последнего подключен ко входу измерителя дальности, выход которого соединен с вторым входом блока переключения режимов, первый вход которого подключен ко второму выходу блока интерполяции, первый вход последнего соединен с третьим выходом блока управления, первый и второй выходы которого подключены ко входу лазерного передатчика и второму входу коммутатора соответственно, первый и второй выходы последнего соединены с входом блока временной фиксации и первым входом многоканального накопителя, соответственно, выход приемника отраженного объекта излучения подключен к первому входу коммутатора, третий вход которого соединен с входом блока управления и выходом блока переключения режимов, выход второго ключа соединен с вторым входом дополнительного блока интерполяции, первый и третий входы которого подключены к третьему выходу блока управления и первому выходу тактового генератора, соответственно, первые входы первого и второго ключей соединены с выходом блока временной фиксации и входом определителя количества импульсов, первый выход которого подключен к второму входу второго ключа, а второй выход определителя количества импульсов соединен с вторым входом первого ключа, выход которого подключен ко второму входу блока интерполяции, отличающийся тем, что в него введены передающее локаторное устройство, приемное локаторное устройство, блок базы данных и третий ключ, первый вход которого соединен с выходом блока временной фиксации, второй вход соединен с третьим выходом определителя количества импульсов, а выход соединен с четвертым входом дополнительного блока интерполяции, пятый вход которого соединен с выходом первого ключа, а шестой вход соединен с выходом блока базы данных, вход которого соединен с третьим выходом блока управления, четвертый выход которого соединен с входом передающего локаторного устройства, а выход приемного локаторного устройства с четвертым входом коммутатора.
| Бортовой лазерный дальномер с определением высоты нижнего края облачности | 2020 |
|
RU2737592C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2562150C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2014 |
|
RU2560011C1 |
| Способ дистанционного измерения толщины льда, способ дистанционного измерения прочности льда, устройство для дистанционного измерения толщины льда, устройство для дистанционного измерения прочности льда и дистанционный измерительный модуль | 2015 |
|
RU2712969C2 |
| JP 2005265733 A, 29.09.2005 | |||
| Способ получения продуктов конденсации фенолов с формальдегидом | 1924 |
|
SU2022A1 |

