Изобретение относится к самолетам, в системах управления которыми взамен гидромеханических связей между рычагами управления в кабине пилота и управляющими органами самолета используются электрические связи - системы дистанционного управления (далее - СДУ).
Одним из аналогов таких самолетов является самолет, в котором реализовано дистанционное управление цельноповоротными стабилизаторами (Журнал «Техника воздушного флота» , 1990 г.; №2; статья «Система управления самолета»).
Основным недостатком системы управления известного самолета является то, что управление остальными органами остается гидромеханическим и приводит к увеличению массы системы и невозможности существенного улучшения характеристик управляемости в боковых каналах.
Наиболее близким аналогом (прототипом) изобретения является самолет с системой дистанционного управления, которая содержит четыре одинаковых вычислительных устройства, расположенных в двух соединительных шкафах и соединенных по входам и выходам между собой через мультиплексную линию связи, четыре блока питания, расположенные в этих же соединительных шкафах, выходы каждого из которых соединены с входами вычислительных устройств, усилители мощности, входы которых подсоединены к выходам вычислителей, а выходы через соединительный шкаф и кабельную сеть самолета к входам электрогидравлических приводов поверхностей управления и поворотных сопел, выходы которых через кабельную сеть и соединительные шкафы соединены с входами вычислителей, датчики параметров движения самолета, выходы которых соединены с входами вычислителей, кнопки и переключатели в кабине, включающие и выключающие режимы работы системы (1. Журнал «Полет», Спец. выпуск Су; 1998 г.; статья «Развитие системы управления самолетов «Су». 2. Сборник трудов пятого международного симпозиума «Авиационные технологии XXI века» том 1, издательство ЦАГИ; 1999 г.; стр.515-521. 3. «Истребитель «Су» Главы 5 и 7, Изд. группа Бадретдинов и К°. Москва 2005 г.).
В прототипе ручное управление самолетом осуществляется системой дистанционного управления (СДУ), состоящей из четырех однотипных вычислителей, установленных в общем соединительном шкафу и соединенных с ним по входам и выходам электрическими сигналами. Электропитание осуществляется четырьмя блоками питания, выходы которых соединены через соединительный шкаф с входами вычислителей. Информация о параметрах полета и положении рычагов управления в кабине формируется в четырехкратно резервированных датчиках параметров полета и датчиках положения рычагов управления и также через соединительный шкаф передается в вычислители, где формируется электрические сигналы, соответствующие заданному положению аэродинамических поверхностей управления. Эти сигналы через соединительный шкаф передаются на электрогидравлические приводы стабилизаторов, флапперонов, рулей направления, носков крыла, переднего горизонтального оперения. Управление поворотом сопел реактивных двигателей осуществляется при помощи трех вычислителей положения сопел, установленных в отдельном соединительном стеллаже. Для обеспечения координации положения сопел с положением аэродинамических поверхностей управления вычислители сопла по выходам и входам через стеллаж и соединительный шкаф соединены с вычислителями. Вычислители сопла через стеллаж по входам и выходам соединены с электрогидравлическими приводами, которые перемещают сопла.
Законы автоматического управления самолетом реализуются в вычислителе системы автоматического управления (далее - САУ), который соединен по входам и выходам через соединительный шкаф с вычислителями СДУ, которые в соответствии с сигналами САУ формируют команды на отклонение приводов.
Определение необходимых ограничений параметров полета реализуются в системе выдачи ограниченных сигналов (далее - СОС), в которой эти значения определяются в зависимости от веса самолета, вида подвесок и режима полета.
Вычисленные сигналы из СОС поступают в вычислители СДУ и в САУ для реализации ограничений по углу атаки и нормальной перегрузке при ручном и автоматическом управлении. Кроме того, эти сигналы поступают на индикацию летчику для формирования предупреждающих сигналов.
Воздушное торможение осуществляется отклонением щитка воздушного тормоза. Щиток отклоняется гидроцилиндром, при подаче в него давления электрокраном, который включается летчиком посредством переключателя, расположенного на рукоятке сектора газа.
В качестве недостатков прототипа следует указать следующее:
1. Наличие отдельных вычислителей САУ, СОС, сопла, каждый из которых имеет свои блоки питания, установочные стеллажи, коммутационную сеть (провода, разъемы и т.д.), что значительно ухудшает массово-габаритные характеристики системы.
Увеличение числа усилителей и усложнение коммутационной сети также значительно снижают надежность (количество часов работы на одну неисправность) системы управления.
2. Законы управления прототипа не предусматривают реализацию ряда функций, облегчающих летчику управление самолетом, а именно:
а) Автоматическое триммирование усилий на ручке управления летчика.
б) Изменение расхода ручки управления на единицу перегрузки (угла атаки) в зависимости от конкретной задачи на данном этапе полета (режим точного управления).
в) Автоматическое парирование моментов сил, возникающих при отказе одного двигателя и вызывающих вращение самолета.
3. Реализованное в прототипе воздушное торможение требует создания отдельной аэродинамической поверхности (тормозного щитка), что также ухудшает массово-габаритные характеристики самолета, сокращает полезные объемы и не позволяет изменять летчику интенсивность торможения.
Технический результат, на достижение которого направлено изобретение, заключается в улучшении массово-габаритных характеристик путем сокращения количества вычислителей, совершенствования законов управления, реализации торможения в полете основными поверхностями управления (рулями направления и флапперонами).
Указанный технический результат достигается тем, что в самолете с системой дистанционного управления, которая содержит четыре одинаковых вычислительных устройства, расположенных в двух соединительных шкафах и соединенных по входам и выходам между собой через мультиплексную линию связи, четыре блока питания, расположенные в этих же соединительных шкафах, выходы каждого из которых соединены с входами вычислительных устройств, усилители мощности, входы которых подсоединены к выходам вычислителей, а выходы через соединительный шкаф и кабельную сеть самолета к входам электрогидравлических приводов поверхностей управления и поворотных сопел, выходы которых через кабельную сеть и соединительные шкафы соединены с входами вычислителей, датчики параметров движения самолета, выходы которых соединены с входами вычислителей, кнопки и переключатели в кабине, включающие и выключающие режимы работы системы, вычислительные устройства системы дистанционного управления выполнены с возможностью реализации функций системы автоматического управления, системы ограничительных сигналов и блока управления поворотными соплами, для чего вычислительные устройства имеют соответствующие алгоритмические блоки, служащие для вычисления сигналов перемещения рычагов управления при автоматическом управлении и передачи их на вход алгоритмического блока ручного управления, где происходит суммирование этих сигналов с сигналами датчиков положения рычагов, для определения значений предельных параметров полета в зависимости от массы самолета и типа подвесок для передачи их на вход алгоритмического блока ручного управления для обеспечения автоматического ограничения этих параметров и на систему индикации для информации летчику о значении предельных параметров, значений требуемых положений золотников приводов поворотных сопел для передачи их на входы усилителей мощности, выходы которых соединены с входами приводов.
Кроме того, в кабине может быть установлен переключатель и тумблер, включающие режим точного управления, а вычислитель дистанционного управления имеет алгоритмический блок, обеспечивающий автоматическое триммирование усилий на ручке управления и изменение передаточных чисел и быстродействия префильтра сигнала ручки управления при включении летчиком режима точного управления.
Кроме того, в вычислительное устройство системы дистанционного управления может быть введен алгоритмический блок, определяющий факт отказа одного из двигателей, величину и знак разворачивающего момента, вызванного отказом этого двигателя, углы, на которые необходимо отклонить рули направления и поворотные сопла, для парирования разворачивающего момента и передай значений этих величин в алгоритмический блок управления приводами, выход которого через усилители мощности соединен с электрогидравлическими приводами рулей направления и поворотных сопел.
Кроме того, в вычислительное устройство системы дистанционного управления может быть введен алгоритмический блок, который в зависимости от длительности нажатия переключателя, расположенного на рычаге управления двигателями, обеспечивает выдачу команды на дифференциальное отклонение рулей направления при кратковременном нажатии или при длительном нажатии на одновременное отклонение рулей направления и на зависание вниз флапперонов, а также обеспечивает определение величины этих отклонений в зависимости от текущих значений параметров полета.
Изобретение поясняется чертежами, где на фиг.1 изображена структурная схема системы дистанционного управления; на фиг.2 - блок-схема алгоритмов одного из четырех однотипных вычислителей; на фиг.3 - структурная схема алгоритмического блока, реализующего закон ручного управления; на фиг.4 - структурная схема блока, формирующего алгоритмы, обеспечивающие автотриммирование и точное управление; на фиг.5 - структурная схема блока, обеспечивающего режимы точного управления; на фиг.6 - схема блока автоматического парирования рулями направления и отклонением сопел двигателей последствий отказа одного двигателя на взлете самолета; на фиг.7 - структурная схема блока воздушного торможения аэродинамическими поверхностями самолета (рулями направления и флапперонами).
Структурная схема системы дистанционного управления (СДУ) самолетом изображена на Фиг.1.
СДУ включает в себя два соединительных шкафа (1), в каждом из которых установлены по два однотипных вычислителя (3), в которых реализуются:
а) алгоритмы формирования требуемого положения всех аэродинамических поверхностей управления при ручном и автоматическом управлении (алгоритмы СДУ, а также при воздушном торможении);
б) алгоритмы управления золотниковыми устройствами электрогидравлических приводов с контролем их исправности (алгоритмы приводов);
в) алгоритмы автоматического управления, формирующие сигналы, суммируемые с сигналами положения рычагов в кабине (алгоритмы САУ);
г) алгоритмы, формирующие предельные значения отдельных параметров полета: нормальной перегрузки ny; угла атаки α, предельной скорости полета и число М (алгоритмы системы ограничительных сигналов - СОС).
В соединительных шкафах (1) размещены блоки питания (4), выходы напряжений которых подключены к входам вычислителей (3) и усилителям мощности (5), входы которых подключены к выходам вычислителей (3), а выходы усилителей мощности через соединительный шкаф (1) и кабельную сеть (6) самолета к входам сервоприводов стабилизаторов (7), носков крыла (8), флапперонов (9), рулей направления (10), поворотных сопел двигателей (11).
Сигналы положений датчиков сервоприводов и их золотниковых устройств через кабельную сеть (6) самолета и соединительные шкафы (1) передаются на входы вычислителей (3) и используются в них для формирования сигналов, управляющих золотниковыми устройствами.
Для обеспечения надежности система четырехкратно резервирована, в каждом соединительном шкафу (1) расположено по два вычислителя (3), два блока питания (4) и два усилителя мощности (5). Соединительные шкафы (1) размещены по правому и левому борту самолета.
Параметры движения самолета (перегрузки и угловые скорости, углы атаки и скольжения, высота и скорость самолета, угловые положения самолета, положение ручки управления, педалей и режимы работы и т.д.) определяются резервированными датчиками (12), сигналы с выходов которых поступают в вычислители через соединительные шкафы (1), цифровые линии связи и кабельную сеть. Аналоговые сигналы с датчиков, расположенных в кабине, поступают на вход блока преобразования сигналов (13), преобразуются в цифровые и по цифровым линиям также передаются в вычислители.
Сигналы самолетных систем, необходимые для работы САУ, СОС и СДУ, поступают в вычислители (3) по мультиплексной линии связи (15) через информационно-управляющую систему ИУС (14). По этой же линии в ИУС выдаются сигналы из системы управления для индикации летчику режимов работы и состояния системы.
Изобретение направлено на решение следующих задач:
1. Объединение в одном общем вычислителе следующих функций: реализация законов ручного управления аэродинамическими поверхностями (СДУ), законов управления соплами двигателей, расчета предельных значений параметров полета и определение факта их превышения (СОС), законов автоматического управления САУ, что за счет исключения вычислителей сопел, СОС, САУ улучшает массово-габаритные характеристики системы, повышает надежность ее работы, сокращает разветвленность кабельной сети и количество разъемов.
2. Введение дополнительных режимов управления самолетом, а именно:
- режим автоматического триммирования в продольном и поперечном канале, что облегчает пилотирование и позволяет не устанавливать кнюппель триммирования на ручку управления;
- режим точного управления, что позволяет летчику при необходимости такого управления (например, дозаправка или прицеливание) увеличивать расход ручки управления на единицу перегрузки (угла атаки) или угловой скорости крена.
3. Введение автоматического парирования последствий отказа одного двигателя на взлете, что повышает безопасность полета и упрощает пилотирование при таких отказах.
4. Реализация воздушного торможения не тормозным щитком, а отклонением рулей направления и флапперонов, что позволяет летчику за счет использования двух аэродинамических поверхностей изменять интенсивность торможения и за счет снятия тормозного щитка улучшить массово-габаритные характеристики самолета.
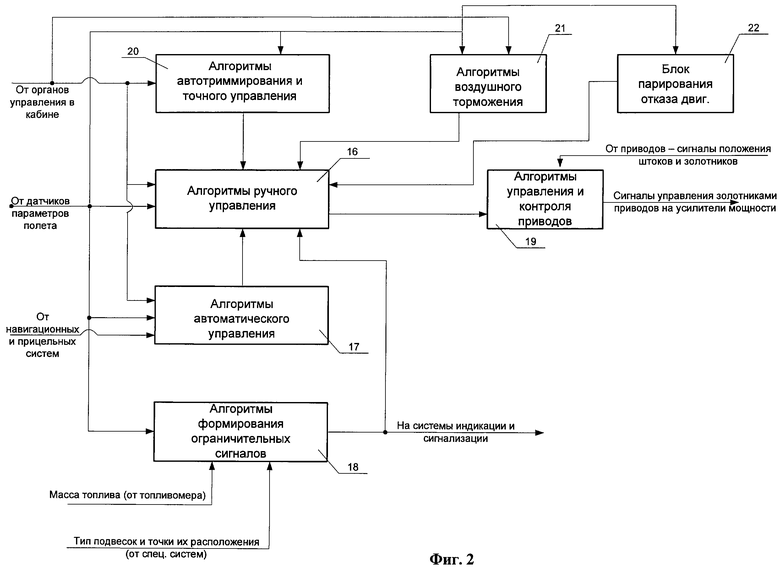
На фиг.2 показана блок схема алгоритмов одного из четырех однотипных вычислителей (поз.3, фиг.1), иллюстрирующая объединение в одном вычислителе решения задач СДУ, САУ, СОС, воздушного торможения, автотриммирования и точного управления, парирования последствий отказа двигателя, управления и контроля приводами аэродинамических поверхностей и сопел.
Алгоритмический блок (16) (СДУ), реализующий закон ручного управления, соединен по входам с блоком (17), реализующим алгоритмы автоматического управления (САУ), блоком (18), формирующим значения ограничительных сигналов (СОС), блоком (20), формирующим алгоритмы, обеспечивающие автотриммирование и точное управление, блоком (21), формирующим алгоритмы воздушного торможения, и блоком (22) парирования отказов двигателя. На входы блока (16) поступают также сигналы положения органов управления в кабине и значения параметров полета от соответствующих датчиков. Значения требуемых положений поверхностей управления и сопел двигателей с выхода блока (16) поступают на блок (19), в котором в соответствии с указанными значениями и сигналами положения датчиков штоков и золотников электрогидравлических приводов реализуются алгоритмы, определяющие значения сигналов управления золотниками приводов. Указанные сигналы через усилители мощности передаются на входы приводов управляющих поверхностей и сопел двигателей. В блоке (19) посредством сравнения заданных значений положения золотников с фактическими также производится контроль исправности работы приводов.
На фиг.3 показана структурная схема связей блока (поз.16, фиг.2) алгоритмов ручного управления с блоком автоматического управления (поз.17, фиг.2), блоком формирования ограничительных сигналов (поз.18, фиг.2), с блоками управления и контроля приводов по сигналам отклонения сопел (поз.19, фиг.2).
Сигналы автоматического управления xϑСАУ и xγСАУ в продольной и горизонтальной плоскостях, а также сигналы автоматических триммеров δϑ, δγ поступают на сумматоры (23) и (24), где суммируются с соответствующими сигналами отклонения ручки управления xθф и xγф. В связи с тем, что при включенной САУ ручка управления находится в нейтральном положении и сигналы с нее равны нулю, в блок (26) поступают только сигналы автоматического управления. Выход сумматора соединен с входом ограничителя (29), в котором реализованы алгоритмы, обеспечивающие ограничение углов атаки и нормальных перегрузок, значения которых в зависимости от конфигурации самолета рассчитываются в алгоритмическом блоке ограничительных сигналов (поз.18, фиг.2). Сигналы с выходов ограничителя (25) и сумматора (24) поступают на входы блока (26), определяющего заданные положения поверхностей управления самолета и сопел двигателей. Сигнал с выхода блока (26) поступает на вход блока (поз.19, фиг.2) управления приводами, выходы которого в виде сигналов управления золотниками правого и левого сопла соединены с входами усилителя мощности (поз.5, фиг.1), в котором эти сигналы преобразуются в напряжения постоянного тока, подающиеся в электрогидроусилители золотниковых устройств гидроприводов сопел.
Автоматическое триммирование обеспечивается тем, что при положении ручки управления, близком к нейтральному, и околонулевых угловых скоростях самолета происходит стабилизация углов тангажа и крена, которые были в этот момент. При отклонении ручки управления от нейтрального положения стабилизация углов отключается.
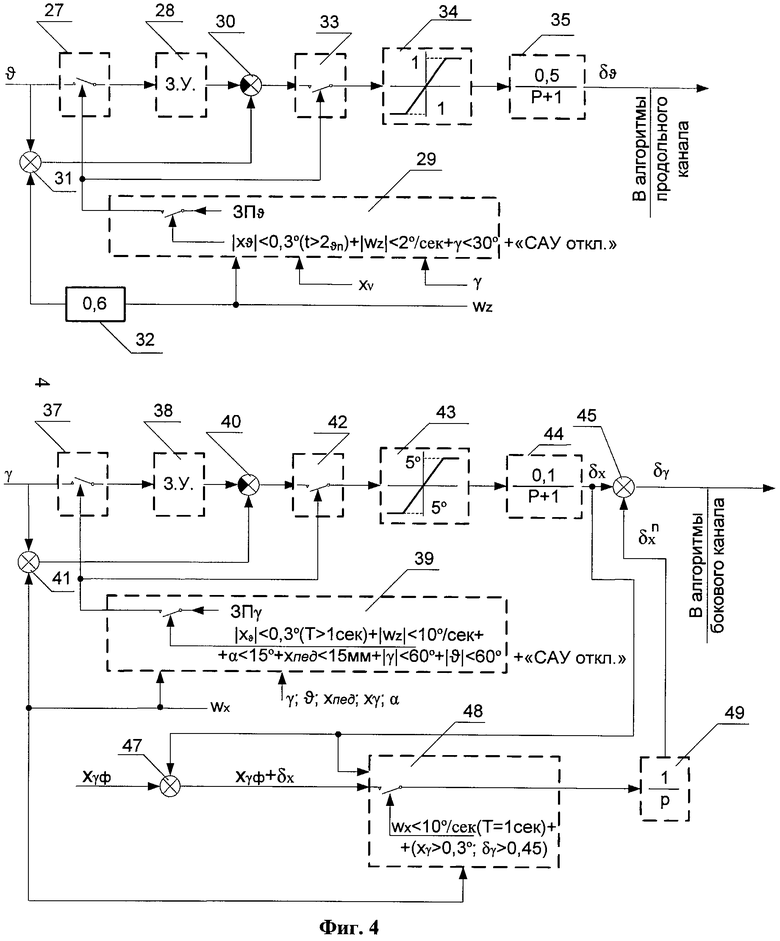
На фиг.4 показана структурная схема блока (поз.20, фиг.2) в части обеспечения автоматического триммирования. Значения углов тангажа и крена подаются на входы ключей (27) и (37), сигналы, с выходов которых поступают на входы запоминающих устройств (28) и (38), сигналы, с выходов которых при замкнутых ключах (27) и (37) равны сигналам на входе, а при разомкнутых равны значению углов, бывших в момент размыкания. Сигналы с выходов запоминающих устройств (28) и (38) подаются на инвертирующие входы сумматоров (30) и (40), на прямые входы которых поступает сумма сигналов углов и соответствующих угловых скоростей ωz ωχ самолета, формируемых в сумматорах (31) и (41), с выходов которых поступают сигналы на ключи (33) и (42). Размыкание ключей (27) и (37) и замыкание ключей (33) и (42) происходит по сигналам ЗПϑ (запоминание тангажа) и ЗПγ (запоминание крена), формируемое в логических устройствах (29) и (39). Конкретное значение параметров полета, при которых вырабатываются сигналы ЗПϑ и ЗПγ, приведены на схеме фиг.4. Таким образом, на выходе ключей (33) и (42) при отсутствии сигналов ЗПϑ и ЗПγ идет нулевое значение, а при наличии команд ЗПϑ и ЗПγ идет разность между текущими и запомненными значениями углов тангажа и крена, просуммированная с сигналами угловых скоростей самолета. Сигналы с выходов ключей проходят через ограничители (34) и (43) и запаздывающие фильтры (35) и (44). Выход фильтра (35) (сигнал δϑ) подается на сумматор (поз.23, фиг.3) алгоритмов продольного канала. В связи с тем, что при отключенной САУ или нулевом положении ручки управления по тангажу сигналы Хϑф=0 и Xϑ САУ=0, сигнал δϑ является управляющим сигналом в продольном канале, что обеспечивает стабилизацию угла тангажа и, следовательно, автотриммирование в этом канале.
В боковом канале для исключения статических ошибок при поперечных валежках самолета добавлен интегратор (49). Сигнал с запаздывающего фильтра (44) подается на вход сумматора (47), где суммируется с сигналом ручки управления Хγф. Сумма сигналов поступает на вход ключа (48), который замыкается при следующих условиях:
1. Угловая скорость по крену мала (|ωx|<10°/сек) и ручка управления находится в нейтрали (Хγф<0,3°).
2. |ωx|>10°/сек, ручка управления не в нейтрали (|Xγф|>0,3°), разность между текущим и запомненным креном превышает околонулевое значение (|δx|>0,15°).
Сигнал с выхода ключа (48) поступает на вход интегратора (49), с выхода которого поступает на вход сумматора (45), где суммируется с сигналом δх, поступающим с выхода фильтра (44). Сигнал с выхода сумматора (45) поступает на сумматор (поз.24, фиг.3) алгоритмов бокового канала.
Из приведенной структуры видно, что интегратор (49) при нейтральном положении ручки управления работает, только если имеется ошибка между текущим и запомненным креном, чем обеспечивается отсутствие автоколебаний. При резком появлении поперечной асимметрии самолета (односторонний сброс подвесок) летчик останавливает вращение отклонением ручки управления (Хγф>0,3°), сигнал с выхода интегратора (49) начинает увеличиваться, а летчик, стабилизируя крен по мере роста сигнала δх, возвращает ручку управления в нейтральное положение, т.е. обеспечивается автоматическое триммирование усилий на ручке управления в поперечном канале.
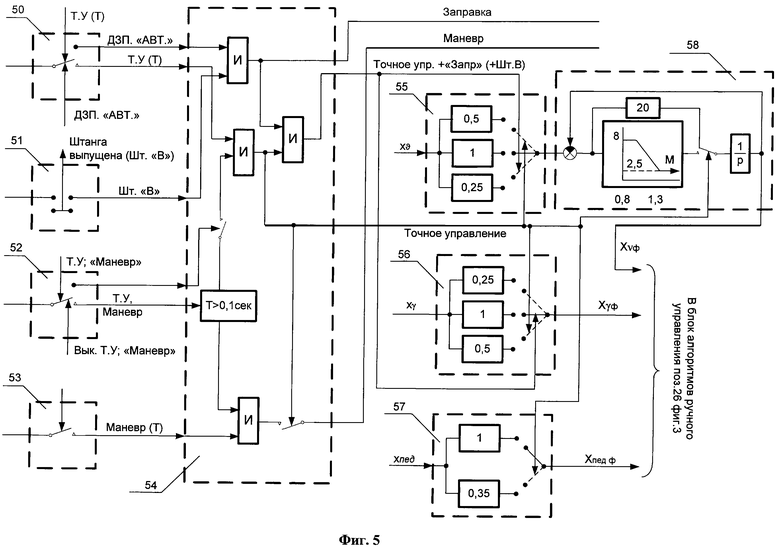
На фиг.5 показана структурная схема блока, обеспечивающая режимы точного управления (Т.У.). Эти режимы облегчают управление самолетом при прицеливании и дозаправке, где требуется уменьшение величины угловых скоростей и перегрузок самолета, возникающих при перемещении рычагов управления в кабине (ручки управления и педалей).
Режим включается летчиком в зависимости от выполняемой задачи. В кабине имеется два тумблера - (53) (Маневр, Т.У.)) и (50) (Дозаправка «Авт», Т.У.)), а на ручке управления нажимной подпружиненный переключатель с разомкнутым средним положением (52). Кроме этого на самолете имеется концевой выключатель (51), выдающий сигнал при выпуске штанги дозаправки. Сигналы с этих устройств поступают в логическое устройство (54), которое формирует команды «Заправка», «Маневр», «Точное управление» и «Точное управление+Заправка».
Работа системы при команде «Заправка» и «Маневр» в данной заявке не рассматривается, т.к. не является объектом настоящего изобретения. Для включения команды «Точное управление» летчик предварительно устанавливает тумблер (50) в положение «Т.У.» и оперативно нажимает на время Т>0,1 сек переключатель «вверх» на ручке управления. Те же действия при выпущенной штанге дозаправки приведут к включению команды «Точное управление + Заправка». Выключение вышеуказанных режимов производятся нажатием переключателя на ручке управления «вниз».
Команда «Точное управление» поступает на переключатели (55), (56) и (57), по которой в переключателях (55) и (56) происходит уменьшение передаточного числа от ручки управления к рулям в 2 раза, как в канале тангажа (переключатель 55), так и в канале крена (переключатель 56). В переключателе (57) происходит уменьшение передаточного числа по отклонению педалей («в 3 раза).
Кроме того, сигнал управления поступает в префильтр сигнала положения ручки управления по тангажу (58), где по этой команде резко уменьшается запаздывание этого префильтра.
При наличии команды «Точное управление + Заправка», где при выполнении дозаправок передаточные числа уменьшаются в 4 раза, а не в 2.
Летные испытания и моделирование режимов точного управления показали эффективность приведенной выше схемы работы в режиме Т.У. при выполнении прицеливания и дозаправки.
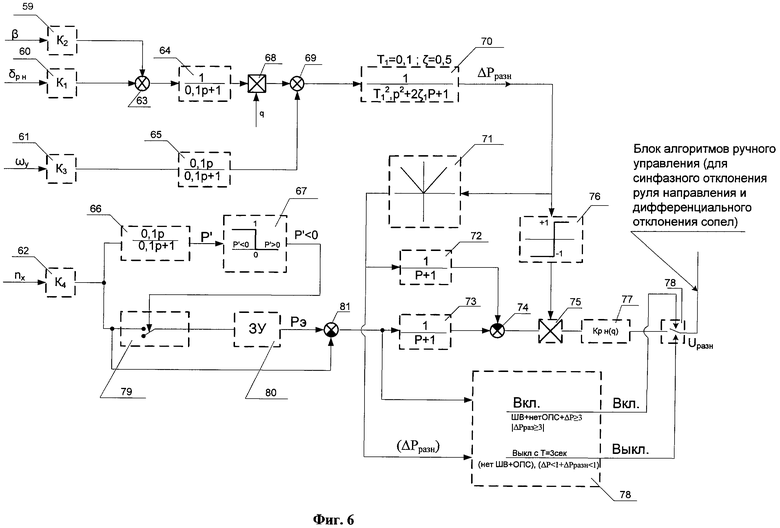
На фиг.6 приведена схема блока автоматического парирования рулями направления и отклонением сопел двигателей последствий отказа одного двигателя на взлете самолета.
Блок решает следующие задачи:
а) установление факта отказа двигателя;
б) установление - какой именно двигатель (правый или левый) отказал;
в) определение величины и знака отклонения рулей направления и сопел двигателей.
Факт отказа двигателя определяется посредством вычисления величины разности тяг двигателей, которая производится в соответствии с уравнением бокового движения самолета.
1. 
где ΔРразн - разность тяг двигателей в тоннах;
K3, K2, K1 - масштабные коэффициенты уравнений движения самолета;
 - угловое ускорение вокруг оси у в градусах/сек2;
- угловое ускорение вокруг оси у в градусах/сек2;
β - угол скольжения в градусах;
δр.н. - отклонение рулей направления в градусах;
 ;
;  - фильтры высокочастотных помех,
- фильтры высокочастотных помех,
где T1=0,1 сек - постоянная времени фильтра;
ξ=0,5 - коэффициент затухания колебаний;
p - оператор дифференцирования.
2. 
где Р - общая тяга двух двигателей в тоннах;
nx - продольная перегрузка по оси Х самолета;
K4 - масштабный коэффициент, зависящий от веса самолета.
Установление отказавшего двигателя, а также величина и знак требуемого отклонения рулей производится по знаку и величине сигналов ΔРразн и изменению общей тяги двигателей  .
.
Блок определяет ΔРразн и Р в соответствии с приведенными выше уравнениями. Сигналы датчиков угла скольжения β и угла отклонения рулей направления δр.н. с учетом масштабных коэффициентов К1 и К2 суммируются в сумматоре (63), фильтруются в фильтре (64), умножаются на значение скоростного напора q в множительном устройстве (68), поступают на первый вход сумматора (69). На второй вход сумматора (69) приходит сигнал угловой скорости ωу с учетом масштабного коэффициента К3 и дифференцирующее звено (65). Сигнал с выхода сумматора (69) поступает на фильтр (70), сигнал на выходе которого равен разности тяг между двигателями.
Сигнал, соответствующий общей тяге двигателей, равный продольному ускорению, с учетом масштабного коэффициента K4 подается на вход дифференцирующего звена (65), с выхода которого поступает на пороговое устройство (76), которое при отрицательном значении сигнала с его выхода  размыкает ключ (79), на вход которого поступает сигнал общей тяги двигателей, а выход ключа (79) соединен с запоминающим устройством (80), сигнал с выхода которого равен сигналу входа при замкнутом ключе (79) или значению
размыкает ключ (79), на вход которого поступает сигнал общей тяги двигателей, а выход ключа (79) соединен с запоминающим устройством (80), сигнал с выхода которого равен сигналу входа при замкнутом ключе (79) или значению  равному тому, которое было при размыкании ключа (79).
равному тому, которое было при размыкании ключа (79).
Сигнал с выхода запоминающего устройства (80) поступает на прямой вход сумматора (81), на инверсный вход которого поступает сигнал общей тяги двигателей. Таким образом, сигнал выхода сумматора (81) соответствует разности между суммарной тягой двигателей, которая была в момент отказа одного из них (в момент, когда общая тяга двигателей стала уменьшаться  ).
).
Сигнал ΔРразн поступает на вход порогового устройства (76), на выходе которого в зависимости от знака ΔРразн вырабатывается сигнал «+1» или «-1», который поступает на первый вход множительного устройства (75), которое определяет знак отклонения рулей направления и сопел двигателей. Величина их отклонений определяется суммой двух сигналов:
1. |ΔРразн|, который снимается с выпрямителя (71), проходит через запаздывающий фильтр (72) и подается на первый вход сумматора (74).
2. Сигнал Рэ-P, пропущенный через изодромный фильтр (73) и поступающий на второй вход сумматора (74). Сигнал с выхода множительного устройства поступает на нелинейный корректор по скоростному напору Kр.н(q) (77), выход которого подается на ключ, который включает и выключает сигнал компенсации разности тяг (uразн) по разовым командам, вырабатываемым в логическом устройстве (78). Включение происходит при следующих условиях:
1. Шасси выпущены (Ш.В.).
2. Передняя стойка разжата (нет ОПС).
3. Общая тяга двигателей  упала на величину более 3 т.
упала на величину более 3 т.
4. Разность тяг двигателей ΔРразн более 3 т.
Выключение происходит при уборке шасси или ΔР<1+ΔРразн<1.
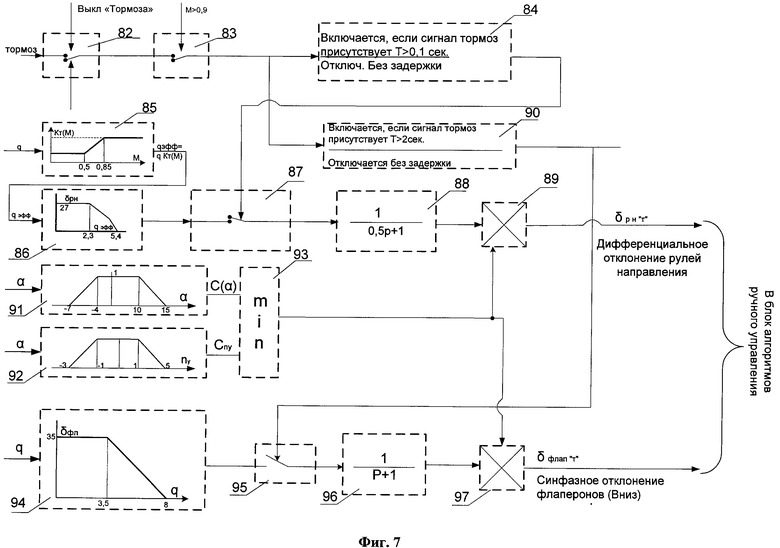
На фиг.7 приведена структурная схема блока воздушного торможения аэродинамическими поверхностями самолета (рулями направления и флапперонами). Команда «Тормоз» включается переключателем (82), расположенным на одном из рычагов управления двигателями (РУД), проходит через ключ (83), размыкающийся при числе М>0,9, и поступает на входы двух задерживающих устройств (84) и (90). Устройство (84) выдает команду на выполнение торможения рулями направления («Тормоз Р.Н.) в случае, если переключатель на «РУДе» включен на время Т>0,1 сек. Устройство (90) выдаст команду на торможение флапперонами, если переключатель на «РУДе» включен на время Т>2 сек. При выключении «Тормоза» команда на торможение с устройств (84) и (90) снимается без задержки.
Сигнал «Тормоз Р.Н.» с выхода устройства (84) замыкает ключ (87), на вход которого поступает сигнал о значение углов отклонения рулей направления, необходимых для торможения, при его выполнении на углах атаки (от -4 до +10°) и нормальных перегрузках в пределах ±1g.
Эта величина определяется значением скоростного режима «q», умноженного на два нелинейных коэффициента, один из которых формируется в корректоре (85) и зависит от числа М (Кт(М)), а второй в корректоре (86) и зависит от величины q·Кт(М). Сигнал с выхода корректора (86) поступает на вход ключа (87), с выхода которого сигнал через запаздывающий фильтр (88) поступает на первый вход множительного устройства (89), второй вход которого подключен к выходу блока - (MIN) (93), который выбирает минимальное значение между сигналами корректоров по углу атаки (91) и нормальной перегрузки (92). Благодаря этому обеспечивается уменьшение углов отклонения рулей направления при больших углах атаки и нормальных перегрузок, что необходимо как по условиям обеспечения прочности, так и по условиям наиболее эффективного торможения.
Сигнал δр.н. «Т» с выхода множительного устройства (89) поступает в блок алгоритмов ручного управления (16) и обеспечивает дифференциальное отклонение рулей направления «наружу».
Сигнал «Тормоз флапперонами» с устройства (90) замыкает ключ (95), на вход которого поступает сигнал отклонения флапперонов, необходимый для торможения при малых углах атаки и значениях перегрузки. Величина этого сигнала определяется нелинейным корректором по скоростному напору (94), который при малых q(q<3,5T/м2) выдает сигнал, соответствующий максимальному отклонению флапперонов вниз, а при q>8Т/м2 запрещает использовать флаппероны для торможения, что также определяется условиями прочности самолета.
Сигнал с выхода ключа (95) через запаздывающий фильтр (96) поступает на вход множительного устройства (97), на второй вход которого поступает сигнал с выхода устройства (93), выбирающего минимальное значение от корректоров (91) и (92). Сигнал с выхода множительного устройства (95) поступает в блок алгоритмов ручного управления и обеспечивает отклонение обоих флапперонов вниз.
Из рассмотренной схемы воздушного торможения следует, что для его выполнения летчик должен кратковременно нажать переключатель на «РУДе». При этом оба руля направления с постоянной времени 0,5 сек будут отклоняться задней кромкой «наружу». Величина отклонения будет зависеть от скоростного напора, числа М, угла атаки и нормальной перегрузки.
При необходимости увеличения интенсивности торможения требуется повторно нажать переключатель и удерживать его в этом положении не менее 2 сек. При этом начнут плавно (с постоянной времени 1 сек) отклоняться вниз флаппероны. Угол отклонения флапперонов также зависит от параметров полета (скоростного напора, угла атаки и нормальной перегрузки).
В случае если необходимо осуществить торможение с максимальной интенсивностью с начала торможения, требуется нажать переключатель и удерживать его не менее 2 сек. При этом рули направления и флаппероны будут отклоняться одновременно. Моделирование и летные испытания схемы торможения подтверждают более высокую интенсивность торможения по сравнению со схемой торможения с использованием тормозного щитка при значительном выигрыше в массово-габаритных характеристиках.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНЫЙ ОДНОМЕСТНЫЙ САМОЛЕТ С КОМПЛЕКСНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2016 |
|
RU2630030C1 |
| ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА ПРОДОЛЬНОГО УПРАВЛЕНИЯ САМОЛЕТОМ | 2006 |
|
RU2316450C1 |
| ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРНЫМИ ПАРАМЕТРАМИ ПОЛЕТА САМОЛЕТА | 2008 |
|
RU2377158C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В ПРОДОЛЬНОМ КАНАЛЕ ПРИ ДОЗАПРАВКЕ В ВОЗДУХЕ | 2022 |
|
RU2833735C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2006 |
|
RU2312793C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2364548C2 |
| Способ и устройство улучшения путевой управляемости самолета-амфибии (гидросамолета) при глиссировании | 2018 |
|
RU2692740C1 |
| Способ формирования отказоустойчивой комплексной системы управления (КСУ) и отказоустойчивая КСУ | 2016 |
|
RU2629454C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ САМОЛЕТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2392186C2 |
| Способ управления полетом летательного аппарата | 2015 |
|
RU2617869C1 |

Изобретение относится к системам дистанционного управления самолетами. Система дистанционного управления содержит два соединительных шкафа (1), в каждом из которых установлены по два однотипных вычислителя (3), в которых реализуются: алгоритмы формирования требуемого положения всех аэродинамических поверхностей управления при ручном и автоматическом управлении, алгоритмы управления золотниковыми устройствами электрогидравлических приводов, алгоритмы автоматического управления, алгоритмы, формирующие предельные значения отдельных параметров полета. В соединительных шкафах (1) размещены блоки питания (4), выходы напряжений которых подключены к входам вычислителей (3) и усилителям мощности (5), входы которых подключены к выходам вычислителей (3), а выходы усилителей мощности через соединительный шкаф (1) и кабельную сеть (6) самолета к входам сервоприводов стабилизаторов (7), носков крыла (8), флапперонов (9), рулей направления (10), поворотных сопел двигателей (11). Достигается улучшение массово-габаритных характеристик путем сокращения количества вычислителей, совершенствования законов управления, реализации торможения в полете основными поверхностями управления (рулями направления и флапперонами). 3 з.п. ф-лы, 7 ил.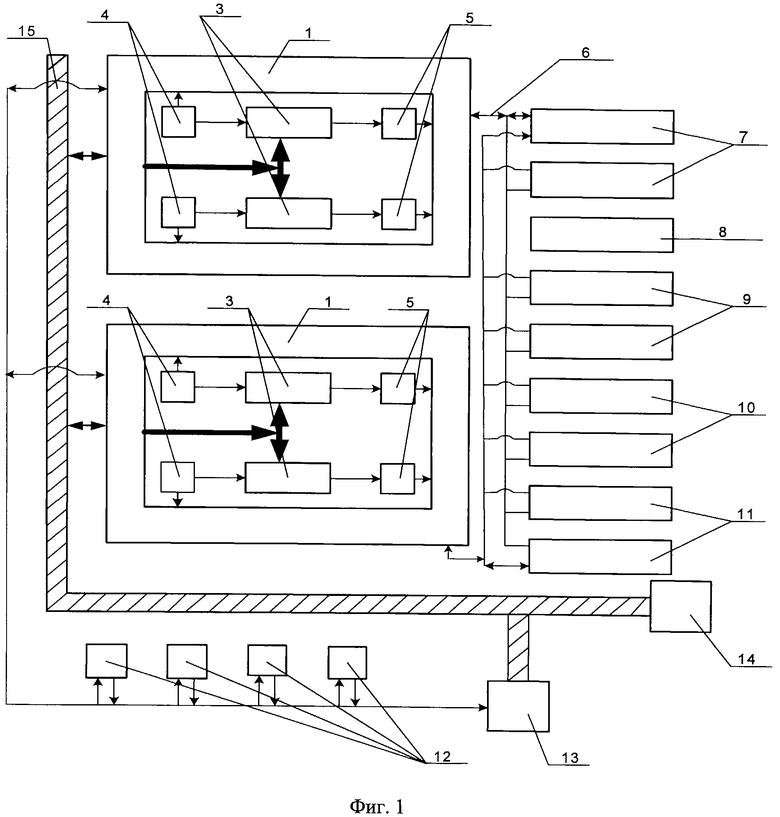
1. Самолет с системой дистанционного управления, которая содержит четыре одинаковых вычислительных устройства, расположенных в двух соединительных шкафах и соединенных по входам и выходам между собой через мультиплексную линию связи, четыре блока питания, расположенные в этих же соединительных шкафах, выходы каждого из которых соединены с входами вычислительных устройств, усилители мощности, входы которых подсоединены к выходам вычислителей, а выходы через соединительный шкаф и кабельную сеть самолета к входам электрогидравлических приводов поверхностей управления и поворотных сопел, выходы которых через кабельную сеть и соединительные шкафы соединены с входами вычислителей, датчики параметров движения самолета, выходы которых соединены с входами вычислителей, кнопки и переключатели в кабине, включающие и выключающие режимы работы системы, отличающийся тем, что вычислительные устройства системы дистанционного управления выполнены с возможностью реализации функций системы автоматического управления, системы ограничительных сигналов и блока управления поворотными соплами, для чего вычислительные устройства имеют соответствующие алгоритмические блоки, служащие для вычисления сигналов перемещения рычагов управления при автоматическом управлении и передачи их на вход алгоритмического блока ручного управления, где происходит суммирование этих сигналов с сигналами датчиков положения рычагов, для определения значений предельных параметров полета в зависимости от массы самолета и типа подвесок для передачи их на вход алгоритмического блока ручного управления для обеспечения автоматического ограничения этих параметров и на систему индикации для информации летчику о значении предельных параметров, значений требуемых положений золотников приводов поворотных сопел для передачи их на входы усилителей мощности, выходы которых соединены с входами приводов.
2. Самолет по п.1, отличающийся тем, что в кабине установлен переключатель и тумблер, включающие режим точного управления, а вычислитель дистанционного управления имеет алгоритмический блок, обеспечивающий автоматическое триммирование усилий на ручке управления и изменение передаточных чисел и быстродействия префильтра сигнала ручки управления при включении летчиком режима точного управления.
3. Самолет по п.1, отличающийся тем, что в вычислительное устройство системы дистанционного управления введен алгоритмический блок, определяющий факт отказа одного из двигателей, величину и знак разворачивающего момента, вызванного отказом этого двигателя, углы, на которые необходимо отклонить рули направления и поворотные сопла, для парирования разворачивающего момента и передачи значений этих величин в алгоритмический блок управления приводами, выход которого через усилители мощности соединен с электрогидравлическими приводами рулей направления и поворотных сопел.
4. Самолет по п.1, отличающийся тем, что в вычислительное устройство системы дистанционного управления введен алгоритмический блок, который в зависимости от длительности нажатия переключателя, расположенного на рычаге управления двигателями, обеспечивает выдачу команды на дифференциальное отклонение рулей направления при кратковременном нажатии или при длительном нажатии на одновременное отклонение рулей направления и на зависание вниз флапперонов, а также обеспечивает определение величины этих отклонений в зависимости от текущих значений параметров полета.
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2001 |
|
RU2192366C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ САМОЛЕТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2392186C2 |
| Устройство для формирования топа к табакорезальным станкам | 1979 |
|
SU867362A1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |

