Изобретение относится к бортовым системам дистанционного управления (СДУ) летательным аппаратом, а именно самолетом, и предназначено для формирования сигналов управления управляющими поверхностями на основании информации о параметрах движения самолета, положении рычагов и органов управления, конфигурации самолета, состоянии шасси и т.д.
Известны системы управления боковым и продольным движением летательных аппаратов (см. В.А.Боднер. Теория автоматического управления полетом. 1964 г., стр.178, 194, И.А.Михалев и др. Системы автоматического управления самолетом. М.: Машиностроение, 1976 г., стр.259, 394, Г.И.Загайнов, Ю.П.Гуськов. Управление полетом самолета. М.: Машиностроение, 1980 г., стр.161-172).
Ближайшим аналогом изобретения является система дистанционного управления самолета А320 (см. Пассажирский самолет Эрбас Индастри А320, сост. Н.Н.Зайцева, ЦАГИ, М., 1993 г., стр.59-69), в которой реализованы функция защиты от превышения угла атаки, функция защиты от превышения скорости, функция автотриммирования, функция компенсации по углам тангажа и крена по нормальной перегрузке. Функция системы оптимизации режимов полета реализована программным обеспечением.
Задача, решаемая изобретением, состоит в обеспечении защиты механизации крыла от чрезмерных нагрузок, а также в обеспечении соответствия каждой конфигурации самолета минимально допустимой скорости полета при этой конфигурации.
Поставленная задача решается за счет того, что система дистанционного управления летательным аппаратом содержит: блок алгоритмов реконфигурации; блок выработки сигналов деградации режимов управления и формирования сообщений; блок расчета динамических коэффициентов; блок фильтрации и аналого-цифрового преобразования входных сигналов; блок активации функции αfloor; блок выработки сигнала отключения автопилота; блок управления рулем высоты; блок управления стабилизатором; блок управления рулем направления; блок управления элеронами; блок управления многофункциональными спойлерами и тормозными щитками; блок управления механизацией крыла; причем входы блока алгоритмов реконфигурации и блока выработки сигналов деградации режимов управления и формирования сообщений соединены с выходами датчиков, в том числе датчиков внешних бортовых информационных систем, выходы блока алгоритмов реконфигурации непосредственно соединены с входами блока выработки сигналов деградации режимов управления и формирования сообщений, блока расчета динамических коэффициентов, блока фильтрации входных сигналов, блока выработки сигнала отключения автопилота, блока управления рулем высоты, блока управления стабилизатором, блока управления рулем направления, блока управления элеронами, блока управления многофункциональными спойлерами и тормозными щитками и блока управления механизацией крыла, при этом выходы блока расчета динамических коэффициентов соединены со входом блока фильтрации входных сигналов, со входом блока активации функции αfloor и входом блока выработки сигнала отключения автопилота, другой вход которого соединен с выходом блока активации функции αfloor и выходом блока фильтрации, другой выход которого соединен со входом блока управления рулем высоты, входом управления рулем направления и входом блока управления элеронами, кроме того, выход блока управления рулем высоты соединен со входом блока управления стабилизатором, выход которого соединен со входом блока управления рулем высоты, а также другой выход блока управления рулем высоты соединен с входом блока управления многофункциональными спойлерами и тормозными щитками и с входом блока управления механизацией крыла, кроме того, выход блока управления рулем направления соединен со входом блока управления элеронами.
Технический результат от использования заявленной СДУ обусловлен особенностью данной схемы системы управления, которая характеризуется тем, что блок управления механизацией крыла (закрылками и предкрылками) интегрирован в СДУ. Такая интеграция с образованием новых связей с другими блоками системы позволяет более полно реализовать следующие защитные функции:
- строгое выдерживание взаимного положения закрылков и предкрылков в соответствии с фиксированными положениями рукоятки управления механизацией как в основном, так и в резервном режиме работы системы управления, что обеспечивает однозначность в задании ограничений для каждой конфигурации самолета (допустимых значений угла атаки, нормальной перегрузки, минимальной и максимальной допустимой скорости полета);
- защита механизации крыла от чрезмерных нагрузок путем алгоритмического ограничения скорости и максимально допустимой для соответствующего положения механизации. Данная функция блока управления механизацией реализуется в блоке управления рулем высоты СДУ;
- функция управления уборкой механизации крыла с целью обеспечения соответствия каждой конфигурации самолета минимально допустимой скорости полета. Последняя определяется помимо положения механизации текущим весом самолета и условиями обледенения крыла.
Также техническим результатом от использования изобретения является комплексная алгоритмическая защита от превышения контролируемых параметров предельных значений, в частности реализация одной из важнейших функций СДУ - защиты от превышения допустимого угла атаки. Для этого в заявленной системе производится:
- выработка сигнала на отклонение руля высоты на пикирование с увеличивающейся интенсивностью по мере приближения к предельному углу атаки в сочетании с интегральной составляющей, формирующей заданную величину установившегося угла атаки;
- уменьшение динамических «забросов» по углу атаки за счет использования сигнала, пропорционального угловой скорости угла атаки;
- ограничение сверху угла тангажа, причем ограничивающая величина тангажа подобрана таким образом, чтобы для всех режимов полета не превысить некоторую величину угла наклона траектории, что может привести к потере скорости полета и, как следствие, к превышению угла атаки;
- применение схемы активации функции αfloor, что также препятствует потере скорости полета при выходе на повышенные углы атаки и косвенно улучшает защиту от превышения допустимого угла атаки;
- выработка сигналов на руль высоты, компенсирующих возникающие продольные моменты от изменения режима работы двигателей, от изменения положения механизации и интерцепторов;
- выработка сигнала, компенсирующего «весовую составляющую» в уравнении для угла атаки в тех случаях, когда она способствует увеличению угла атаки.
При использовании заявленной СДУ также достигается:
- обеспечение удовлетворительных характеристик устойчивости и управляемости в соответствии с требованиями норм летной годности;
- алгоритмическое ограничение угла атаки величиной αmax<αS;
- включение режима набора высоты при приближении к углам сваливания (функция αfloor);
- алгоритмическое ограничение максимальной и минимальной перегрузки Ny;
- ограничение максимальной скорости за счет введения сигнала на кабрирование пропорционально (V-Vc) и dV/dt ((М-Мс) и dM/dt);
- алгоритмическая защита хвостовой части фюзеляжа от ударов о поверхность ВПП на взлете;
- автоматическая балансировка в продольном канале;
- стабилизация углового положения самолета по тангажу и крену при отсутствии вмешательства летчика в управление;
- отработка сигналов автоматической системы управления полетом;
- формирование командного сигнала на отклонение механизации крыла от ручки управления с учетом полетных ограничений.
Изобретение поясняется чертежами.
На фиг.1 изображена система дистанционного управления летательным аппаратом.
На фиг.2 - фрагмент 1 с фиг 1.
На фиг.3 - фрагмент 2 с фиг 1.
На фиг.4 - блок управления рулем высоты.
На фиг.5 - фрагмент 3 с фиг 4.
На фиг.6 - фрагмент 4 с фиг 4.
Блок алгоритмов основного контура управления системы содержит взаимосоединенные входами-выходами по бортовому каналу информационного обмена:
1 - блок алгоритмов реконфигурации;
2 - блок выработки сигналов деградации режимов управления и формирования сообщений, в функцию которого входит отключение основной системы и включение резервной системы;
3 - блок расчета динамических коэффициентов;
4 - блок фильтрации входных сигналов;
5 - блок активации функции αfloor;
6 - блок выработки сигнала отключения автопилота;
7 - блок управления рулем высоты;
8 - блок управления стабилизатором;
9 - блок управления рулем направления;
10 - блок управления элеронами;
11 - блок управления многофункциональными спойлерами и тормозными щитками;
12 - блок управления механизацией крыла.
Информационная взаимосвязь всех блоков системы осуществляется по бортовому каналу информационного обмена, включающего связи любого типа между взаимодействующим оборудованием (Легкий фронтовой истребитель. - М.: Любимая книга, 1998, стр.248-249). Входные информационные сигналы поступают с датчиков, в том числе от внешних бортовых информационных систем. Каждый из этих входных сигналов сопровождается признаком достоверности, формируемой системой контроля. При обнаружении отказа какого-либо входного сигнала система контроля изменяет значение соответствующего признака достоверности. Таким образом, на вход системы управления поступают информационные сигналы и сигналы достоверности (0, 1).
Входные информационные сигналы включают группу управляющих сигналов, группу динамических параметров, группу сигналов от ручек управления спойлерами и механизацией крыла, группу сигналов отклонения рулевых поверхностей, группу сигналов обжатия шасси, группу сигналов о двигателе, группу сигналов от ручек управления двигателями.
В группу управляющих сигналов (AC_control_signal) входят следующие сигналы: отклонение боковой ручки по тангажу; отклонение боковой ручки по крену; перемещение педалей; сигнал с кнопки триммера стабилизатора; сигнал с кнопки триммера элеронов; сигнал с кнопки триммера руля направления; сигнал с кнопки обнуления триммера руля направления; сигнал управления из автопилота в продольном канале в виде заданного отклонения боковой ручки; сигнал управления из автопилота в канале крена в виде заданного отклонения боковой ручки; сигнал управления из автопилота в канале рыскания в виде заданного отклонения педалей; сигнал включения автоматического режима управления.
В группу динамических параметров (Aircraft_signals) входят: угловая скорость крена, град/с; угловая скорость рыскания, град/с; угловая скорость тангажа, град/с; нормальная перегрузка в связанных осях; боковая перегрузка в связанных осях; угол крена; угол тангажа; угол атаки; модуль истинной воздушной скорости, узлы; число Маха; приборная скорость, узлы; текущий вес, кг; радиовысота, футы.
В группу сигналов от ручек управления спойлерами и механизацией крыла (Lever signals) входят: сигнал с ручки управления механизацией крыла; сигнал с рукоятки управления интерцепторами в режиме воздушных тормозов.
В группу сигналов отклонения рулевых поверхностей (Control_surface_signals) входят: угол отклонения стабилизатора; угол отклонения закрылков; угол отклонения предкрылков.
В группу сигналов обжатия шасси входят: признак обжатия левой стойки шасси; признак обжатия правой стойки шасси.
В группу сигналов о двигателе входят: обороты ротора вентилятора левого двигателя, об/мин; обороты ротора вентилятора правого двигателя, об/мин; сигнал с концевых выключателей, соответствующий установке РУД левого двигателя в положение МГ; сигнал с концевых выключателей, соответствующий установке РУД правого двигателя в положение МГ; признак включения реверса левого двигателя; признак включения реверса правого двигателя.
В группу сигналов от ручек управления двигателями входят: сигнал с ручки управления левым и правым двигателем соответственно.
Группа сигналов достоверности входных сигналов: отказ сигнала истинной скорости; отказ сигнала Маха; отказ сигнала приборной скорости; отказ сигнала угла атаки; отказ сигнала угловой скорости рыскания; отказ сигнала нормальной перегрузки; отказ сигнала боковой перегрузки; отказ сигнала положения закрылков; отказ сигнала положения предкрылков; отказ сигнала положения стабилизатора; отказ сигнала веса самолета; отказ сигнала оборотов ротора вентилятора левого двигателя; сигнал отключения автопилота; вектор сигналов сообщений алгоритма реконфигурации.
Обозначения входящих сигналов.
Группа управляющих сигналов (AC_control_signal):
Xv - отклонение боковой ручки по тангажу;
Хе - отклонение боковой ручки по крену;
Xn - перемещение педалей;
Utr_t - сигнал с кнопки триммера стабилизатора (0, 1);
Utr_e - сигнал с кнопки триммера элеронов (0, 1);
Utr_n - сигнал с кнопки триммера руля направления (0, 1);
reset_rn - сигнал с кнопки обнуления триммера руля направления (0, 1);
XvAP - сигнал управления из автопилота в продольном канале в виде заданного отклонения боковой ручки;
XelAP - сигнал управления из автопилота в канале крена в виде заданного отклонения боковой ручки;
XnAP - сигнал управления из автопилота в канале рыскания в виде заданного отклонения педалей;
AY - сигнал включения автоматического режима управления (0, 1).
Группа динамических параметров (Aircraft_signals):
р - угловая скорость крена;
r - угловая скорость рыскания;
q - угловая скорость тангажа;
nz - нормальная перегрузка в связанных осях;
ny - боковая перегрузка в связанных осях;
gamma - угол крена;
teta - угол тангажа;
alfa - сигнал угла атаки;
VTAS - модуль истинной воздушной скорости, узлы;
М - число Маха;
VCAS - приборная скорость, узлы;
Gs - текущий вес;
Hrads - радиовысота.
Группа сигналов от ручек управления спойлерами и механизацией крыла (Lever signals):
Xrums - сигнал с ручки управления механизацией крыла (0, 1, 2, 3, 4);
Xruts - сигнал с рукоятки управления интерцепторами в режиме воздушных тормозов (-2, 0, 1, 2, 3, 4).
Группа сигналов отклонения рулевых поверхностей (Control_surface_signals):
fistabs - угол отклонения стабилизатора;
flaps - угол отклонения закрылков;
slats - угол отклонения предкрылков.
Группа сигналов антиобледенительной системы (WAIS_signals):
WAIS_ON_OFF_s - сигнал включения антиобледенительной системы (0, 1);
WAIS_FAILURE_s - сигнал отказа антиобледенительной системы (0, 1);
ICE_detection_s - сигнал с датчика обледенения (0, 1);
ICE_detection_Failure_s - сигнал отказа датчика обледенения (0, 1).
F. Группа сигналов обжатия шасси (LG_signals):
SHO - признак обжатия стоек шасси;
SHO_ls - признак обжатия левой стойки шасси;
SHO_rs - признак обжатия правой стойки шасси.
G. Группа оборотов двигателя (Engine_signals):
nl_ls - обороты ротора вентилятора левого двигателя;
nl_rs - обороты ротора вентилятора правого двигателя.
Группа сигналов двигателя (FADEC_sig):
Urud_mg_l - сигнал с концевых выключателей, соответствующий
установке РУД левого двигателя в положение МГ (0, 1);
Urud_mg_r - сигнал с концевых выключателей, соответствующий
установке РУД правого двигателя в положение МГ (0, 1);
Urev_l - признак включения реверса левого двигателя (0, 1);
Urev_r - признак включения реверса правого двигателя (0, 1).
Группа сигналов от ручек управления двигателями (Trust_level_sig):
rudl, rudr - сигнал с ручки управления левым и правым двигателем соответственно.
К. Несгруппированные сигналы:
d_mode - сигнал включения резервного контура из испытательного пульта (0, 1);
int_fl - сигнал отказа интерцепторов (0, 1);
dv_fl - сигнал отказа рулей высоты (0, 1).
Сигналы достоверности входных сигналов (Otk_signals):
Otk_VTAS - отказ сигнала истинной скорости (0, 1);
Otk_M - отказ сигнала Маха (0, 1);
Otk_VCAS - отказ сигнала приборной скорости (0, 1);
Fl_alfa - отказ сигнала угла атаки (0, 1);
Fl_r - отказ сигнала угловой скорости рыскания (0, 1);
Fl_nz - отказ сигнала нормальной перегрузки (0, 1);
Fl_ny - отказ сигнала боковой перегрузки (0, 1);
Fl_fl - отказ сигнала положения закрылков (0, 1);
Fl_sl - отказ сигнала положения предкрылков (0, 1);
Fl_fistab - отказ сигнала положения стабилизатора (0, 1);
F1_G - отказ сигнала веса самолета (0, 1);
Fl_nl_l - отказ сигнала оборотов ротора вентилятора левого двигателя (0, 1);
Fl_nl_r - отказ сигнала оборотов ротора вентилятора правого двигателя (0, 1);
F1_XRUT - отказ сигнала с рукоятки управления интерцепторами в режиме воздушных тормозов (0, 1);
FI_Shol - отказ сигнала обжатия левой стойки шасси (0, 1);
FI_Shor - отказ сигнала обжатия правой стойки шасси (0, 1);
Fl_p - отказ сигнала угловой скорости крена (0, 1);
Fl_gam - отказ сигнала угла крена (0, 1);
Fl_q - отказ сигнала угловой скорости тангажа (0, 1);
Fl_teta - отказ сигнала угла тангажа (0, 1);
Fl_xrum - отказ сигнала с ручки управления механизацией крыла (0, 1);
Fl_Hrad - отказ сигнала радиовысоты;
Otk_W_On_Off, Otk_W_F, Otk_ICE_D, Otk_ICE_D_F - отказы сигналов противообледенительной системы;
Fl_d_mode - отказ сигнала включения резервного контура из испытательного пульта (0, 1);
F1_AY - отказ сигнала включения автопилота (0, 1);
Fl_XvAPl, FL_XeAP, FL_XnAP - отказы командных автопилотных сигналов в каналах тангажа, крена и рыскания соответственно (0, 1);
Fl_Xv, FL_Xe, FL_Xn - отказы командных сигналов от БРУ в каналах тангажа, крена и рыскания соответственно (0, 1);
Fl_Utr_t, FL_ Utr_e, FL_ Utr_n - отказы сигналов из блока триммирования в каналах тангажа, крена и рыскания соответственно (0, 1);
Fl_Urud_mg_l, Fl_mg_r - отказ сигналов с концевых выключателей, соответствующий установке РУД в положение МГ для левого и правого двигателей соответственно (0, 1);
Fl_Urud_mg_l, Fl_mg_r - отказ сигналов включения реверса левого и правого двигателей соответственно (0, 1);
Fl_rudl, Fl_rudp - отказ сигналов с РУДов левого и правого двигателей соответственно (0, 1);
Fl_int_fl - отказ сигнала отказа секций интерцепторов (0, 1);
Fl_dv_fl - отказ сигнала отказа секций руля высоты (0, 1);
Fl_reset_rn - отказ сигнала с кнопки обнуления триммера руля направления (0, 1);
Fl_Au_tr_off- отказ сигнала отключения автобалансировки в продольном канале из испытательного пульта (0, 1);
Fl_Lim_V_Aoff- отказ сигнала отключения ограничений по скорости и Маху из испытательного пульта (0, 1);
FL_Lim_alfa_off- отказ сигнала отключения ограничений по углу атаки из испытательного пульта (0, 1).
Обозначения выходных сигналов блоков:
d_mod - вектор сигналов перехода на резервный контур управления (во всех каналах или по каналу механизации крыла);
ailR_d - командный сигнал на отклонение правого элерона;
ailL_d - командный сигнал на отклонение левого элерона;
rudder_d - командный сигнал на отклонение руля направления;
elv_d - командный сигнал на отклонение руля высоты;
fi_t - командный сигнал на отклонение стабилизатора;
inL_d - командный сигнал на отклонение левого интерцептора;
inR_d - командный сигнал на отклонение правого интерцептора;
Xpz_d - командный номер положения механизации крыла: 0, 1, 2, 3, 4, 5, 6;
de_bls - сигнал триммера элеронов, град (в АСЕ);
dn_bls - сигнал триммера руля направления, град (в АСЕ);
gsp_d - командный сигнал на отклонение воздушного тормоза (в АСЕ);
alfa_floor - сигнал активации αfloor (0, 1);
sig_HLD - сигнал сообщений алгоритма управления механизацией крыла;
dsng_ap - сигнал отключения автопилота;
nfun - вектор сигналов сообщений алгоритма реконфигурации.
Блок алгоритмов реконфигурации 1 (блок «Reconfig signal consolidation») предназначен для исключения недостоверных сигналов из управления и восстановления их по другим сигналам для снижения потерь соответствующих функций СДУ. Цель реконфигурации - максимально сохранить функциональную полноту алгоритмов СДУ при потере некоторых входных сигналов, тем самым повысить надежность управления. Все перечисленные выше входные сигналы алгоритмов СДУ (информационные и соответствующие им сигналы достоверности) поступают в блок реконфигурации. Выходные сигналы блока реконфигурации сгруппированы в аналогичные входным сигналам группы.
Блок состоит из следующих подблоков: блок реконфигурации сигналов обжатия стоек шасси; блок реконфигурации положения стабилизатора; блок реконфигурации сигнала с рукоятки управления механизацией крыла; блок реконфигурации положения закрылков; блок реконфигурации положения предкрылков; блок реконфигурации сигнала с рукоятки управления интерцепторами в режиме воздушных тормозов; блок реконфигурации веса; блок реконфигурации радиовысоты; блок реконфигурации оборотов двигателя; блок реконфигурации управляющих сигналов; блок реконфигурации динамических параметров; блок реконфигурации сигналов двигательной установки; блок реконфигурации сигналов отказов управляющих поверхностей.
Входящий в блок алгоритмов реконфигурации 1 блок реконфигурации сигналов обжатия стоек шасси выполняет следующую функцию. Сигналы обжатия основных стоек шасси являются наиболее важными сигналами и используются в СДУ для отключения интегрального управления в каналах тангажа и крена; отключения автоматической балансировки в продольном канале; отключения функции повышения спиральной устойчивости при |γ|≥γmах; отключения стабилизации углового положения самолета по крену и тангажу при отсутствии вмешательства летчика в управление; для включения автоматического торможения самолета при пробеге с помощью интерцепторов и воздушных тормозов; включения блокировки выпуска интерцепторов; отключения сигнала по перегрузке; включения алгоритма защиты от удара хвостовой частью фюзеляжа о землю на взлете. В алгоритмах реконфигурации реализована логика, позволяющая восстановить эти сигналы при двойном отказе. При отказе одного сигнала обжатия одной стойки шасси он восстанавливается по сигналу обжатия другой стойки. При отказе двух сигналов обжатия они восстанавливаются по информации о приборной скорости, которая поступает из другой измерительной системы. В случае увеличения скорости до значения, которое заведомо выше максимальных скоростей взлета и посадки (ограничение по колесам), сигналы обжатия по обеим стойкам обнуляются. Выходные сигналы (реконфигурированные): признак обжатия левой стойки шасси (0; 1); признак обжатия правой стойки шасси (0; 1).
Входящий в блок алгоритмов реконфигурации 1 блок реконфигурации положения стабилизатора предназначен для получения информации о положении стабилизатора, которая используется в алгоритмах управления для регулировки коэффициента передачи в прямой цепи управления рулем высоты. Входные сигналы: отказ сигнала стабилизатора (0, 1); сигнал угла стабилизатора; параметры - упомянутая константа. Выходные сигналы (реконфигурированные): реконфигурированный угол отклонения стабилизатора.
Входящий в блок алгоритмов реконфигурации 1 блок реконфигурации веса предназначен для восстановления сигнала веса (сигнал G) самолета в случае недостоверной входной информации. Сигнал G и заранее заданный параметр G* используются для расчетов положения отклонения боковой ручки управления (БРУ) по тангажу, а также для коррекции коэффициентов усиления в прямой цепи управления. При отказе сигнала веса в алгоритмах СДУ принимают G=G*=const. Входные сигналы: текущий вес, кг; отказ сигнала веса самолета (0, 1); параметр G*. Выходной сигнал: реконфигурированный сигнал веса самолета, кг.
Входящий в блок алгоритмов реконфигурации 1 блок реконфигурации радиовысоты предназначен для получения используемого в алгоритмах СДУ сигнала радиовысоты, который применяется в алгоритмах для блокировки изменения механизации крыла на этапе взлета и в алгоритме отключения интегральной составляющей продольного канала при подходе к земле. Входные сигналы: сигнал радиовысоты; отказ сигнала радиовысоты. Выходной сигнал (реконфигурированный): сигнал радиовысоты.
Входящий в блок алгоритмов реконфигурации 1 блок реконфигурации ручки управления механизацией крыла при необходимости (в случае отказа сигнала с ручки управления механизацией крыла) сохраняет до конца полета сигнал, предшествующий отказу. В этом случае обеспечивается безударность управления в канале механизации крыла, что увеличивает безопасность полета на этапах взлета и посадки. Входные сигналы: сигнал с ручки управления механизацией крыла; отказ сигнала с ручки управления механизацией крыла. Выходной сигнал (реконфигурированный): сигнал с ручки управления механизацией крыла.
Входящий в блок алгоритмов реконфигурации 1 блок реконфигурации положения закрылков выполняет следующую функцию. Сигнал положения закрылков используется для определения коэффициента прямой связи по рулю высоты; для определения значений табличных функций cу, максимально допустимого угла атаки αm, а также угла атаки αS (далее - «сигнальный»), при котором включается функция ограничения угла атаки; для синхронизации процесса выпуска-уборки предкрылков и закрылков в системе управления механизацией крыла; при расчете сигнала на отклонение руля высоты для компенсации момента тангажа при изменении положения механизации крыла. При отказе сигнала закрылков в блоке СДУ нарушается функция алгоритмического ограничения угла атаки. Однако эту функцию можно сохранить на большинстве режимов полета, если для восстановления информации об отказавшем сигнале использовать информацию от ручки управления механизацией крыла. В случае отказа сигнала закрылков управление в канале механизации крыла переводится на резервный контур. Входные сигналы: отказ сигнала закрылков (0, 1); сигнал угла закрылков; реконфигурированный сигнал с ручки управления механизацией крыла (0…4). Параметры: заранее заданные углы соответствия угла отклонения предкрылка и угла отклонения закрылка. Выходные сигналы (реконфигурированные): реконфигурированный угол закрылков.
Входящий в блок алгоритмов реконфигурации 1 блок реконфигурации положения предкрылков выполняет следующую функцию. Сигнал положения предкрылков используется аналогично сигналу закрылков (см. выше). Для восстановления информации об отказавшем сигнале используется реконфигурированный сигнал закрылков. Входные сигналы: отказ сигнала предкрылков (0, 1); сигнал угла предкрылков; сигнал угла закрылков. Параметры: заданные значения управляющих сигналов. Выходной сигнал (реконфигурированный): реконфигурированный угол предкрылков.
В блоке реконфигурации сигнала с рукоятки управления интерцепторами в режиме воздушных тормозов, входящем в блок алгоритмов реконфигурации 1, сигнал с рукоятки управления интерцепторами в режиме воздушных тормозов обнуляется в случае недостоверности этого сигнала. Входные сигналы: сигнал с рукоятки управления интерцепторами в режиме воздушных тормозов; сигнал достоверности сигнала с рукоятки управления интерцепторами в режиме воздушных тормозов (0, 1). Выходные сигналы (реконфигурированные): сигнал с рукоятки управления интерцепторами в режиме воздушных тормозов.
В блоке реконфигурации оборотов двигателя, входящем в блок алгоритмов реконфигурации 1, сигналы оборотов двигателя обнуляются в случае недостоверности хотя бы одного сигнала. Входные сигналы: обороты ротора вентилятора левого двигателя, об/мин; обороты ротора вентилятора правого двигателя, об/мин; отказ сигнала оборотов ротора вентилятора левого двигателя (0, 1); отказ сигнала оборотов ротора вентилятора правого двигателя (0, 1). Выходные сигналы (реконфигурированные): обороты ротора вентилятора левого двигателя, об/мин; обороты ротора вентилятора правого двигателя, об/мин.
В блоке реконфигурации управляющих сигналов, входящем в блок алгоритмов реконфигурации 1, входные сигналы в случае их отказа реконфигурируются по заранее заданным значениям, введенным в БЦВМ.
В блоке реконфигурации динамических параметров, входящем в блок алгоритмов реконфигурации 1, динамические параметры в случае отказа реконфигурируются в соответствии с заранее заданными значениями.
Блок 2 выработки сигналов деградации режимов управления и формирования сообщений (блок «FCL direct mode logic FCL_status messenger»), в функцию которого входит отключение основной системы и включение резервной системы, предназначен для выработки: сигналов сообщений; сигналов перехода на резервный контур; сигнала отключения автопилота. Сообщения формируются в зависимости от отказа того или иного входного сигнала в СДУ. Вектор перехода на резервный контур состоит из двух параметров: 1-й параметр характеризует полный переход на резервный контур; 2-й параметр характеризует переход на резервный контур по каналу механизации (0, 1). Отключение автопилота осуществляется при отказе любого входного сигнала. Входные сигналы (из блока алгоритмов реконфигурации 1): сигналы достоверности входных сигналов (Otk_signals) и сигнал включения резервного контура из испытательного пульта (d_mode). Выходные сигналы: вектор сигналов сообщений алгоритма реконфигурации (nfun); вектор сигналов перехода на резервный контур управления (d_mod); параметр отключения автопилота.
Блок расчета динамических коэффициентов 3 (блок «Dynamic_coefficient_calculation») осуществляет вычисление настроечных коэффициентов и параметров алгоритмов СДУ по текущей полетной информации. Блок включает массивы данных, сгруппированные по выходным сигналам: определение коэффициента безопасности по скорости в автоматическом режиме управления; определение постоянных времени фильтров сигналов положения боковой ручки и угловой скорости тангажа (выходной вектор); определение сигналов обжатия шасси; определение параметров функции; определение коэффициентов контура руля высоты; определение коэффициентов контура элеронов; определение коэффициентов контура руля направления; определение коэффициента контура многофункциональных спойлеров.
В блоке расчета параметров функции αfloor, входящем в блок расчета динамических коэффициентов 3, рассчитываются приращения к значению «сигнального» угла атаки αS для определения угла атаки, при котором активируется функция αfloor. Входные сигналы: фильтрованный сигнал числа Маха; угол отклонения закрылков; угол отклонения предкрылков; параметры: зависимость дельты по числу Маха; зависимость дельты (приращений) по углу отклонения закрылков; зависимость дельты (приращений) по углу отклонения предкрылков. Выходные сигналы: дельта (приращения) по числу М; дельта (приращения) по углу отклонения закрылков; дельта (приращения) по углу отклонения предкрылков.
В блоке расчета табличных функций, входящем в блок расчета динамических коэффициентов 3, рассчитываются значения характерных углов атаки и коэффициентов усиления в канале руля высоты в зависимости от текущих параметров полета и ледового состояния поверхности самолета. Входные сигналы: угол отклонения закрылков; угол отклонения предкрылков; фильтрованный сигнал числа Маха; фильтрованный сигнал приборной скорости; сигнал обжатия стойки шасси; сигнал включения автопилота, (0, 1); фильтрованный сигнал истинной скорости; параметры: коэффициент безопасности в автоматическом режиме; зависимость коэффициента усиления от числа Маха и приборной скорости; зависимость характеристики управляемости по перегрузке от приборной скорости. Выходные сигналы: значения передаточных коэффициентов; «линейный» угол атаки, то есть угол атаки начала «ложки» в моментной характеристике либо начала выполаживания зависимости Су, где ослабевает обратная связь по перегрузке; положение стабилизатора при nу=0; «сигнальный» угол атаки αS, при котором должно начинаться предупреждение о сваливании; предельный угол атаки, близкий к углу сваливания; значение характеристики управляемости по перегрузке; значение коэффициента Су на «сигнальном» угле атаки αS.
В блоке формирования допустимого значения управляющего сигнала на кабрирование, входящем в блок расчета динамических коэффициентов 3, определяется величина, которая соответствует положению ручки по тангажу, при котором самолет достигает «сигнального» угла атаки αS. Входные сигналы: значение характеристики управляемости по перегрузке; значение коэффициента Су на «сигнальном» угле атаки
αS; приборная скорость; сигнал обжатия основных опор шасси (0, 1); текущий вес G, кг; параметры: характерная площадь, м2; величина отклонения БРУ «на себя»; скорость изменения сигнала, мм/с; полное отклонение БРУ «на себя». Выходные сигналы: положение ручки по тангажу при «сигнальном» угле атаки; коэффициент подъемной силы горизонтального полета.
В блоке расчета настроечных коэффициентов в канале руля высоты, входящем в блок расчета динамических коэффициентов 3, определяются настроечные коэффициенты для формирования требуемой статической характеристики управляемости по перегрузке. Входные сигналы: фильтрованное число Маха; фильтрованная истинная скорость, м/с; угол отклонения стабилизатора; положение стабилизатора при ny=0; «сигнальный» угол атаки αS; максимальный угол атаки; номинальное значение характеристики управляемости по перегрузке; скорректированная перегрузка (из блока руля высоты); ограничение положения ручки по тангажу; положение ручки по тангажу при «сигнальном» угле атаки αS; угол отклонения закрылков; угол отклонения предкрылков; параметры: зависимость отношения эффективности стабилизатора к эффективности руля высоты по числу Маха; максимальное значение коэффициента передачи в прямой цепи, град/ед.пер; минимальное значение коэффициента передачи в прямой цепи, град/ед.пер; зависимость коэффициента в цепи ограничения угла атаки по числу Маха; максимальное отклонение БРУ «на себя»; максимальный угол тангажа; угол тангажа при «сигнальном» угле атаки; максимальное отклонение БРУ «от себя»; зависимость минимальной перегрузки от закрылков и предкрылков; зависимость максимальной перегрузки от закрылков и предкрылков; отклонение БРУ «от себя», 70%-е отклонение БРУ «на себя»; зависимость требуемой управляемости по отклонению ручки на «сигнальном» угле атаки. Выходные сигналы: коэффициент передачи в прямой цепи; коэффициент в цепи ограничения угла атаки; коэффициент в цепи ограничения угла тангажа; коэффициент при минимальной нормальной перегрузке; коэффициент при максимальной нормальной перегрузке.
Блок фильтрации входных сигналов 4 (блок «Input_signal_filtering») предназначен для фильтрации и ограничения входных сигналов. Он содержит два блока: блок-фильтр для повышения запаса устойчивости в канале тангажа и блок-фильтр угла атаки. Входные сигналы: реконфигурированные динамические параметры, реконфигурированные управляющие сигналы, сигнал обжатия стоек шасси, вектор параметров для канала руля высоты; дельта (приращение) перегрузки относительно горизонтального полета; постоянные времени префильтров положения боковой ручки и угловой скорости тангажа; параметры: звено нелинейности по сигналу от боковой ручки по тангажу; ограничения сигнала боковой ручки по тангажу; ограничение сигнала боковой ручки по крену; ограничение сигнала педалей; постоянные времени фильтров угловых скоростей крена, рыскания, боковой перегрузки, угла тангажа, нормальной перегрузки, угла крена соответственно; параметры фильтра изгибных колебаний; ограничения по углу тангажа. Выходные сигналы блока сгруппированы в выходные векторы: сигналы с рычагов управления; фильтрованные сигналы динамических параметров.
В блоке-фильтре для повышения запаса устойчивости в канале тангажа сигнал угловой скорости тангажа, прошедшей через фильтр упругих колебаний, пропускается через фильтр вида:  . Из-за появления дополнительных корней и полюсов такой фильтр позволяет при необходимости увеличить запасы устойчивости замкнутой системы. Входные сигналы: постоянные времени фильтра; угловая скорость тангажа, прошедшая через фильтр упругих колебаний (ФУК), град/с. Выходные сигналы: фильтрованная угловая скорость тангажа.
. Из-за появления дополнительных корней и полюсов такой фильтр позволяет при необходимости увеличить запасы устойчивости замкнутой системы. Входные сигналы: постоянные времени фильтра; угловая скорость тангажа, прошедшая через фильтр упругих колебаний (ФУК), град/с. Выходные сигналы: фильтрованная угловая скорость тангажа.
Блок-фильтр угла атаки предназначается для фильтрации турбулентной составляющей сигнала угла атаки. Входные сигналы: угловая скорость тангажа, прошедшая через ФУК; динамический параметр; реконфигурированный угол атаки; фильтрованная приборная скорость; дельта (приращение) перегрузки относительно горизонтального полета. Параметры: постоянная времени фильтра. Выходные сигналы: фильтрованный угол атаки.
Блок активации функции αfloor 5 (блок «40_alfa_floor_management») предназначен для выработки сигнала активации функции αfloor. Входные сигналы блока: полученные из блока расчета динамических коэффициентов 3 параметры функции
αfloor; полученные из блока фильтрации входных сигналов 4 фильтрованные сигналы динамических параметров. Параметры: минимальная скорость активации функции αfloor; максимальное число Маха активации функции αfloor. Выходные сигналы: признак активации функции αfloor (0, 1).
Блок выработки сигнала отключения автопилота 6 (блок «39_AP_management») предназначен для выработки сигнала отключения автопилота. Входные сигналы: коэффициент безопасности по скорости в автоматическом режиме управления; параметры: функции αfloor; фильтрованные сигналы динамических параметров; минимальная безопасная скорость; параметр отключения автопилота; скорректированный сигнал по перегрузке. Параметры: максимальное значение по перегрузке для автопилота; максимальное и минимальное значения угла тангажа для автопилота; максимальное значение угла крена для автопилота; максимальные значения числа Маха и приборной скорости для автопилота. Выходные сигналы: сигнал отключения автопилота.
Блок управления рулем высоты 7 (блок «Elevator») предназначен для выработки командного сигнала на руль высоты и вектора управляющих сигналов для блока управления стабилизатором. Блок содержит:
- «2_lift_compensation_in_tum» - блок формирования корректирующих сигналов 15;
- «5_overspeed_protection» - блок ограничения скорости и числа Маха 16;
- «8d_negative_pitch_angle_limitation» - блок ограничения отрицательного угла тангажа 17;
- «1bl_pitch_control_command_signal» - блок формирования командных сигналов от ручки с учетом ограничений 18;
- «6b_non_integral_side_stick_sensitivity» - блок формирования управляющего сигнала для неинтегрального контура управления 19;
- «6c_integral_side_stick_sensitivity» - блок формирования управляющего сигнала для интегрального контура управления 20;
- «9_pitch_angle_hold» - блок стабилизации угла тангажа 21;
- «7е_Су_ Correction» - блок вычисления параметра подъемной силы 22;
- «7b_AoA_Limitation» - блок ограничения угла атаки 23;
- «8b_pitch_angle_limitation» - блок ограничения положительного угла тангажа 24;
- «lb2_pitch_control_loop_closure» - блок формирования управляющих сигналов замкнутого контура 25;
- «7d_Weight_Compensation» - блок весовой компенсации 26;
- «7a__proportional_AoA_signal» - блок управления углом атаки 27;
- «8a_pitch_angle_stability» - блок управления углом тангажа 28;
- «11_tail_bump_prevention» - блок защиты от ударов хвостом на взлете 29;
- «la_pitch_direct_control» - блок прямого управления 30;
- «lb3_pitch_control_proportional_control» - блок позиционного управления 31;
- «lb4_pitch_control_integral_control» - блок интегрального управления 32;
- «lc_elevator_limiter» - блок суммирования 33.
Входные сигналы блока управления рулем высоты 7 (блока «Elevator»): реконфигурированные управляющие сигналы; динамические коэффициенты; вектор параметров для канала руля высоты из блока вычисления динамических коэффициентов; фильтрованные сигналы динамических параметров; сигналы с рычагов управления; сигнал обжатия основных стоек шасси; сигнал обратной связи по углу отклонения стабилизатора. Выходные сигналы: продольная перегрузка для горизонтального полета; дельта (превышение) продольной перегрузки относительно перегрузки горизонтального полета; сигнал ограничения скорости и числа Маха 16; приращение нормальной перегрузки в уравнении для угла атаки; командный сигнал на привод руля высоты; вектор управляющих сигналов для блока управления стабилизатором.
Блок коррекции сигналов по углу тангажа 13 «8c_Pitch_Angle_Lift_Compensation_Correction» состоит из двух подблоков, первый из которых предназначается для формирования разрешающего сигнала коррекции перегрузки на вираже в рабочей области углов тангажа. Входные сигналы: фильтрованный угол тангажа; параметры: сигнальный угол тангажа. Выходные сигналы: Fteta - коэффициент разрешающего сигнала коррекции перегрузки на вираже в рабочей области углов тангажа (0…1).
Второй подблок, входящий в блок коррекции сигналов по углу тангажа 13, предназначается для формирования разрешающего сигнала коррекции перегрузки на вираже в рабочей области углов атаки. Входные сигналы: «сигнальный» угол атаки; фильтрованный угол атаки. Выходные сигналы: Fgamma - коэффициент разрешающего сигнала коррекции перегрузки на вираже в рабочей области углов атаки (0…1).
Блок формирования корректирующих сигналов 15 «2_lift_compensation_in_turn» предназначается для формирования скорректированных сигналов угловой скорости тангажа и перегрузки в режиме координированного разворота с текущим углом крена.
Входные сигналы: динамический параметр; Fteta - коэффициент разрешающего сигнала коррекции перегрузки на вираже в рабочей области углов тангажа (0…1);
Fgamma - коэффициент разрешающего сигнала коррекции перегрузки на вираже в рабочей области углов атаки (0…1); фильтрованный угол крена; фильтрованный ограниченный угол тангажа. Параметры: ограничение угла крена. Выходные сигналы: скорректированный сигнал угловой скорости тангажа; скорректированный сигнал перегрузки.
Блок ограничения скорости и числа Маха 16 «5_overspeed_protection» предназначается для формирования сигнала ограничения скорости и числа Маха. Входные сигналы: фильтрованная приборная скорость; фильтрованное число Маха; максимальная допустимая в нормальной эксплуатации скорость. Параметры: коэффициент производной скорости; ограничения на сигнал производной скорости; коэффициент скорости; максимальное крейсерское число Маха; коэффициент производной Маха; ограничения на сигнал производной числа Маха; коэффициент Маха. Выходные сигналы: сигнал ограничения скорости и число Маха.
Блок ограничения отрицательного угла тангажа 17 «8d_negative_pitch_angle_limitation» предназначается для формирования сигнала ограничения отрицательного угла тангажа. Входные сигналы: фильтрованный угол тангажа. Параметры: угол начала ограничения; коэффициент усиления. Выходные сигналы: сигнал ограничения отрицательного угла тангажа.
Блок формирования командных сигналов от ручки с учетом заложенных в него ограничений 18 (ограничения - из блока ограничения отрицательного угла тангажа 17) «lbl_pitch_control_command_signal» предназначается для формирования командных сигналов от ручки с учетом ограничений по скорости, числу Маха и отрицательного угла тангажа. Входные сигналы: сигнал от БРУ; сигнал ограничения скорости и числа Маха; сигнал ограничения отрицательного угла тангажа. Параметры: угол начала ограничения; коэффициент усиления. Выходные сигналы: скорректированный сигнал от БРУ для неинтегрального контура управления; скорректированный сигнал от БРУ для интегрального контура управления, мм.
Блок формирования управляющего сигнала для неинтегрального контура «6b_non_integral_side_stick_sensitivity» 19 предназначается для формирования требуемой статической характеристики управляемости по перегрузке. Входные сигналы: положение ручки по тангажу при «сигнальном» угле атаки; значение производной хода ручки по перегрузке при минимальной нормальной перегрузке; значение производной хода ручки по перегрузке при максимальной нормальной перегрузке; скорректированный сигнал от БРУ для неинтегрального контура управления, мм. Параметры: отклонения БРУ «от себя», мм. Выходные сигналы: управляющий сигнал для неинтегрального контура, мм.
Блок формирования управляющего сигнала для интегрального контура управления 20 «6c_integral_side_stick_sensitivity» предназначается для формирования требуемой статической характеристики управляемости по перегрузке. Входные сигналы: положение БРУ на «сигнальном» угле атаки; значение производной хода ручки по перегрузке при минимальной нормальной перегрузке; значение производной хода ручки по перегрузке при максимальной нормальной перегрузке; скорректированный сигнал от БРУ для интегрального контура управления. Параметры: 70%-е значение отклонения БРУ «от себя». Выходные сигналы: управляющий сигнал для интегрального контура.
Блок стабилизации угла тангажа 21 «9_pitch_angle_hold» содержит контур формирования управляющего сигнала и блок формирования заданного угла тангажа. Входные сигналы: фильтрованный угол тангажа; фильтрованный сигнал от ручки; сигнал включения автоматического режима управления; фильтрованный угол атаки; сигнальный угол атаки; сигнал ограничения скорости и числа Маха; сигнал обжатия основных опор шасси; коэффициент усиления позиционного сигнала; коэффициент усиления интегрального сигнала. Параметры: коэффициент прямой связи (0. 1); постоянная времени фильтра; ограничение интегрального сигнала; ограничение позиционного сигнала; ограничение интеграла; постоянная времени списывания интеграла. Выходные сигналы: управляющий сигнал блока стабилизации угла тангажа; признак режима стабилизации угла тангажа (0, 1).
Блок формирования заданного угла тангажа при отсутствии управляющего сигнала с ручки управления, входящий в блок стабилизации угла тангажа 21 «9_pitch_angle_hold». Входные сигналы: фильтрованный угол тангажа; сигнал от БРУ; сигнал включения автоматического режима управления (0, 1); фильтрованный угол атаки; сигнальный угол атаки; сигнал ограничения скорости и числа Маха; сигнал обжатия основных опор шасси (0, 1). Параметры: зона нечувствительности сигнала БРУ; время захвата угла тангажа после дачи БРУ; максимальное значение заданного угла тангажа; минимальное значение заданного угла тангажа. Выходные сигналы: признак режима стабилизации угла тангажа (0, 1); заданное значение угла тангажа. Входные параметры: фильтрованный угол тангажа; сигнал от БРУ; сигнал включения автоматического режима управления (0, 1); сигнал обжатия основных опор шасси (0, 1); фильтрованный угол атаки; сигнальный угол атаки; сигнал ограничения скорости и Маха; зона нечувствительности по БРУ; время захвата угла тангажа после дачи БРУ; максимальное значение заданного угла тангажа; минимальное значение заданного угла тангажа; время нахождения БРУ в нейтральной позиции. Внутренние параметры: заданное значение угла тангажа; признак режима стабилизации угла тангажа (0, 1); триггер включения счетчика времени (0, 1). Выходные сигналы: заданное значение угла тангажа; признак режима стабилизации угла тангажа (0, 1); триггер включения счетчика времени (0, 1).
Блок вычисления параметра подъемной силы 22 «7е_Су_ Correction» предназначается для формирования параметра отключения обратных связей интегрального контура по значению коэффициента подъемной силы (параметр подъемной силы - FCу). Входные сигналы: коэффициент подъемной силы на «сигнальном» угле атаки; коэффициент подъемной силы горизонтального полета. Параметры: минимальное значение параметра FCу, дельта к Су при «сигнальном» угле атаки, при которой параметр FCу уменьшается до значения FCуmin. Выходные сигналы: параметр подъемной силы.
Блок ограничения угла атаки 23 «7b_AoA_Limitation» предназначается для формирования сигналов ограничения угла атаки. Входные сигналы: фильтрованный угол атаки; коэффициент передачи на больших углах атаки; «сигнальный» угол атаки; максимальный угол атаки; скорректированный сигнал от БРУ для интегрального контура управления; положение БРУ на «сигнальном» угле атаки; коэффициент обратной связи по углу атаки для интегрального контура; коэффициент обратной связи по углу атаки для неинтегрального контура. Выходные сигналы: признак полета в рабочей зоне углов атаки (1…0); признак полета в зоне ограничений углов атаки (0…1); управляющий сигнал по углу атаки для интегрального контура; сигнал по углу атаки для блока управления стабилизатором; позиционный управляющий сигнал по углу атаки.
Блок ограничения положительного угла тангажа 24 «8b_pitch_angle_limitation» предназначается для формирования сигналов ограничения положительного угла тангажа. Входные сигналы: коэффициент передачи на больших углах тангажа; фильтрованный угол тангажа; скорректированный сигнал от БРУ для интегрального контура управления; положение БРУ на сигнальном угле атаки; коэффициент обратной связи по углу тангажа для интегрального контура. Выходные сигналы: признак полета в рабочей области углов тангажа (1…0); управляющий сигнал по углу тангажа для интегрального контура.
Блок формирования управляющих сигналов замкнутого контура 25 «lb2_pitch_control_loop_closure» предназначается для формирования сигналов обратных связей для неинтегрального и интегрального контуров. Входные сигналы: фильтрованная скорость тангажа, град/с; скорректированный сигнал угловой скорости тангажа, град/с; скорректированный сигнал перегрузки; фильтрованный сигнал перегрузки; сигнал обжатия шасси, (0, 1); управляющий сигнал для неинтегрального контура; управляющий сигнал автопилота; номинальное значение характеристики управляемости по перегрузке; управляющий сигнал для интегрального контура; коэффициент демпфирования; дополнительный коэффициент демпфирования в режиме стабилизации; признак работы автопилота, (0, 1); признак режима стабилизации угла тангажа (0, 1); фильтрованный угол тангажа. Параметры: ограничение на сигнал автопилота; сигнальный угол тангажа. Выходные сигналы: управляющий сигнал для неинтегрального контура; демпфирующий сигнал; скорректированный управляющий сигнал по перегрузке; управляющий сигнал для интегрального контура; суммарный коэффициент демпфирования.
Блок весовой компенсации 26 «7d_Weight_Compensation» предназначается для формирования командного сигнала весовой компенсации. Входные сигналы: коэффициент усиления; фильтрованный угол крена; фильтрованный угол тангажа; фильтрованный угол атаки; фильтрованная перегрузка; суммарный коэффициент демпфирования; динамический параметр, град/с; признак полета в зоне ограничений углов атаки (0…1). Выходные сигналы: командный сигнал весовой компенсации; приращение нормальной перегрузки в уравнении для угла атаки.
Блок управления углом атаки 27 «7a_proportional_AoA_signal» предназначается для формирования командного сигнала по углу атаки. Входные сигналы: коэффициент усиления; фильтрованный угол атаки; линейный угол атаки; коэффициент усиления. Параметры: постоянная времени изодромного звена. Выходные сигналы: командный сигнал по углу атаки; сигнал обратной связи по углу атаки.
Блок управления углом тангажа 28 «8a_pitch_angle_stability» предназначается для формирования командного сигнала по углу тангажа. Входные сигналы: фильтрованный угол тангажа; коэффициент усиления. Параметры: сигнальный угол тангажа. Выходные сигналы: командный сигнал по углу тангажа.
Блок защиты от ударов хвостом на взлете 29 «ll_tail_bump_prevention» предназначается для формирования командного сигнала защиты хвостовой части фюзеляжа от ударов о поверхность ВПП на взлете. Входные сигналы: фильтрованный угол тангажа; фильтрованная скорость тангажа, град/с; сигнал обжатия шасси, (0, 1). Параметры: зависимость отклонения руля высоты от угловой скорости; зависимость отклонения руля высоты от угла тангажа; зависимости коэффициента усиления от времени полета после отрыва шасси. Выходные сигналы: командный сигнал защиты хвостовой части фюзеляжа от ударов о поверхность ВПП на взлете.
Блок прямого управления 30 «la_pitch_direct_control» предназначается для формирования командного сигнала прямого управления. Входные сигналы: коэффициент передачи в прямой цепи, град/ед.пер; управляющий сигнал для неинтегрального контура. Параметры: максимальное значение отклонения руля высоты; минимальное значение отклонения руля высоты. Выходные сигналы: командный сигнал прямого управления.
Блок позиционного управления 31 «lb3_pitch_control_proportional_control» предназначается для формирования командного сигнала позиционного управления. Входные сигналы: управляющий сигнал для неинтегрального контура; демпфирующий сигнал; скорректированный управляющий сигнал по перегрузке; коэффициент усиления; динамический параметр, град/с; признак полета в рабочей зоне углов атаки (1…0); коэффициент усиления. Параметры: постоянная времени фильтра управляющего сигнала; постоянная времени фильтра скорректированного сигнала. Выходные сигналы: командный сигнал позиционного управления.
Блок интегрального управления 32 «lb4_pitch_control_integral_control» предназначается для формирования командного сигнала интегрального управления и сигнала отключения автобалансировки. Входные сигналы: демпфирующий сигнал; скорректированный управляющий сигнал по перегрузке; управляющий сигнал для интегрального контура; коэффициент усиления сигнала перегрузки; коэффициент усиления сигнала угловой скорости; динамический параметр, град/с; компенсация выпуска механизации; компенсация выпуска интерцепторов; признак автопилота (0, 1); признак режима стабилизации угла тангажа (0, 1); сигнал обжатия шасси, (0, 1); сигнал отключения автобалансировки в продольном канале из испытательного пульта (0, 1); радиовысота; параметр подъемной силы; признак полета в рабочей зоне углов атаки (1…0); управляющий сигнал по углу атаки для интегрального контура; признак полета в рабочей области углов тангажа (1…0); управляющий сигнал по углу тангажа для интегрального контура; сигнал обратной связи по стабилизатору. Параметры: радиовысота отключения автобалансировки; коэффициент усиления при управлении; коэффициент усиления при стабилизации; ограничение на входе в интеграл, град/с. Выходные сигналы: командный сигнал интегрального управления; сигнал отключения автобалансировки (0, 1).
Блок суммирования 33 «lc_elevator_limiter» предназначается для формирования суммарного командного сигнала на руль высоты. Входные сигналы: командный сигнал весовой компенсации; командный сигнал по углу атаки; командный сигнал по углу тангажа; командный сигнал защиты хвостовой части фюзеляжа от ударов о поверхность ВПП на взлете; позиционный управляющий сигнал по углу атаки; командный сигнал прямого управления; командный сигнал позиционного управления; командный сигнал интегрального управления. Параметры: максимальное значение руля высоты; минимальное значение руля высоты. Выходные сигналы: суммарный командный сигнал на руль высоты.
Первый выход блока «5_overspeed_protection» ограничения скорости и числа Маха 16 соединен с первым входом блока «lbl_pitch_control_command_signal» формирования командных сигналов от ручки управления, второй вход которого соединен с выходом блока «8d_negative_pitch_angle_limitation» ограничения отрицательного угла тангажа 17, первый выход блока «lbl_pitch_control_command_signal» формирования командных сигналов от ручки с учетом ограничений 18 соединен с входом блока «6b_non_integral_side_stick_sensitivity» формирования управляющего сигнала для неинтегрального контура управления 19, а второй выход блока «lbl_pitch_control_command_signal» формирования командных сигналов от ручки с учетом ограничений 18 соединен с входом блока «6c_integral_side_stick_sensitivity» формирования управляющего сигнала для интегрального контура управления 20, выход блока «8c_Pitch_Angle_Lift_Compensation_Correction» коррекции сигналов по углу тангажа 13 соединен с первым входом блока «2_lift_compensation_in_turn» формирования корректирующих сигналов 15, второй вход которого соединен с выходом блока «7c_AoA_Lift_Compensation_Correction» коррекции сигналов по углу атаки 14, первый и второй выходы блока «2_lift_compensation_in_turn» формирования корректирующих сигналов 15 соединены соответственно с первым и вторым входами блока «lb2_pitch_control_loop_closure» формирования управляющих сигналов замкнутого контура 25, третий вход которого соединен с блоком «6b_non_integral_side_stick_sensitivity» формирования управляющего сигнала для неинтегрального контура управления 19, четвертый вход блока «lb2_pitch_control_loop_closure» формирования управляющих сигналов замкнутого контура 25 соединен с выходом блока «6c_integral_side_stick_sensitivity» формирования управляющего сигнала для интегрального контура управления 20, первый выход блока «9_pitch_angle_hold» стабилизации угла тангажа 21 соединен с пятым входом блока «lb2_pitch_control_loop_closure» формирования управляющих сигналов замкнутого контура 25, шестой вход которого соединен со вторым выходом блока «9_pitch_angle_hold» стабилизации угла тангажа 21 и четвертым входом блока «lb4_pitch_control_integral_control» интегрального управления 32, пятый вход которого соединен с выходом блока «7е_Су_ Correction» вычисления параметра подъемной силы 22, первый выход блока ограничения угла атаки 23 соединен с шестым входом блока интегрального управления 32 и четвертым входом блока позиционного управления 31, второй выход блока ограничения угла атаки 23 соединен с входом блока весовой компенсации 26, третий выход блока «7b_AoA_Limitation» ограничения угла атаки 23 соединен с седьмым входом блока «lb4_pitch_control_integral_control» интегрального управления 32, восьмой и девятый входы которого соединены соответственно с первым и вторым выходами блока «8b_pitch_angle_limitation» ограничения положительного угла тангажа 24, первый выход блока «lb2_pitch_control_loop_closure» формирования управляющих сигналов замкнутого контура 25 соединен с входом блока «la_pitch_direct_control» прямого управления 30 и первым входом блока «lb3_pitch_control_proportional_ control» позиционного управления 31, второй выход блока «lb2_pitch_control_loop_closure» формирования управляющих сигналов замкнутого контура 25 соединен со вторым выходом блока «lb3_pitch_control_proportional_ control» позиционного управления 31 и первым входом блока «lb4_pitch_control_integral_control» интегрального управления 32, третий выход блока «lb2_pitch_control_loop_closure» формирования управляющих сигналов замкнутого контура 25 соединен с третьим входом блока «lb3_pitch_control_proportional_control» позиционного управления 31 и вторым входом блока «lb4_pitch_control_integral_control» интегрального управления 32, третий вход которого соединен с четвертым выходом блока «lb2_pitch_control_loop_closure» формирования управляющих сигналов замкнутого контура 25, выход блока «7d_Weight_Compensation» весовой компенсации 26 соединен с первым входом блока «lc_elevator_limiter» суммирования 33, второй вход которого соединен с выходом блока «7a_proportional_AoA_signal» управления угла атаки, выход блока «8a_pitch_angle_stability» управления углом тангажа 28 соединен с третьим входом блока «lc_elevator_limiter» суммирования 33, четвертый вход которого соединен с выходом блока «ll_tail_bump_prevention» защиты от ударов хвостом на взлете 29, выход блока «la_pitch_direct_control» прямого управления 30 соединен с пятым входом блока «lc_elevator_limiter» суммирования 33, шестой вход которого соединен с выходом блока «lb3_pitch_control_proportional_control» позиционного управления 31.
Введенный в СДУ блок управления механизацией крыла (блок АСУМК «HLD») 12 реализует следующие функции.
1). Отслеживание заданного закона отклонения механизации.
2). Автоматическая уборка механизации при превышении максимальной допустимой скорости.
3). Автоматический выпуск механизации в требуемое положение при уменьшении скорости полета ниже скорости, разрешенной для крейсерской конфигурации.
4). Запрет уборки и выпуска механизации после взлета до достижения заданной высоты.
5). Запрет уборки механизации при недопустимо малой скорости полета.
6). Неполная уборка механизации в случае наличия льда на крыле.
Блок 12 (блок «HLD») формирует командный сигнал на отклонение механизации, основываясь на данных о текущем положении механизации, скорости, высоты полета и заданном значении положения ручки. Командный сигнал формируется с учетом полетных ограничений. Все ограничения на изменение конфигурации и автоматическое изменение конфигурации отменяются при наличии сигнала обжатия стоек шасси или приборной скорости менее заданного значения (Vзад).
Командный сигнал формируется по следующим приоритетам:
1) ограничение по максимальному углу отклонения механизации - защита от разрушения;
2) автоматический выпуск механизации по минимальной скорости полета - для повышения маневренных возможностей самолета;
3) запрет на любое изменение командного сигнала при взлете - требование сертификационных норм;
4) запрет на формирование команды на уборку - по минимально допустимой скорости, для положения механизации с номером на "1" меньше текущего.
В блок 12 (блок «HLD») входит блок табличных функций для расчета Cymах для каждого положения механизации, по которой формируется минимально допустимая скорость. Превышение минимально допустимой скорости для положения механизации с номером на "1" меньше текущего снимает запрет на уборку механизации и позволяет ее убрать в следующее положение. При возникновении запрета или ограничения каждый блок формирует сообщение, соответствующее данному ограничению или действию (уборке или выпуску).
В блок 12 входят следующие блоки:
- блок формирования командного сигнала от ручки управления механизацией;
- блок формирования сигнала на запрет уборки механизации;
- блок формирования сигнала на уборку механизации;
- блок формирования сигнала на запрет изменения положения механизации при взлете;
- блок формирования сигнала на автоматический выпуск механизации в положение "1";
- блок расчета Cymах;
- блок выбора ограничений;
- блок формирования командного сигнала.
Входные сигналы: G - текущий вес; приборная скорость; радиометрическая высота; положение рукоятки управления механизацией крыла; угол текущего положения закрылков; угол текущего положения предкрылков; вектор обжатия шасси; М - число Маха; поступающий с выхода блока расчета динамических коэффициентов 3 номер положения механизации, выбираемый в зависимости от варианта обледенения и режима работы системы противообледенения; сигналы положения РУДов. Выходные сигналы: командный сигнал на заданное положение механизации [0 1 2 3 4 5]; вектор номеров сообщений АСУМК для формирования сообщений на дисплее пилота; минимальная скорость для текущего положения механизации для блока выработки сигнала отключения автопилота.
Блок формирования командного сигнала от ручки управления механизации формирует сигнал заданного номера механизации в зависимости от положения рукоятки управления механизацией крыла и коррекции ее по приборной скорости VCAS: при положении рукоятки управления механизацией «1» вырабатывается заданный номер положения механизации «1», например, при VСАS>Vзад и «2», например, при VСАS<Vзад. При положении рукоятки управления механизацией (РУМ) больше «1» номер положения механизации равен положению РУМ, увеличенному на 1. Входные сигналы: положение рукоятки управления механизацией крыла; VCAS - приборная скорость. Параметры: скорость, при которой происходит переключение командного сигнала от РУМ. Выходные сигналы: индикатор положения механизации.
Блок формирования сигнала на запрет уборки механизации формирует сигнал на запрет уборки механизации. Запрет уборки механизации формируется при скорости полета меньше минимально допустимой скорости (Vmin), для положения механизации с номером на «1» меньше текущего. Механизация убирается до тех пор, пока не наступает запрет ее дальнейшей уборки. Vmin рассчитывается через текущий вес и Cymах (для положения механизации с номером на "1" меньше текущего). В случае выработки сигнала на запрет уборки механизации формируется соответствующее сообщение. Входные сигналы: VCAS - приборная скорость; текущий вес, кг; Cymах - вектор состоящий из (Cymах для положения механизации с номером на «1» меньше текущего, Cymах - текущий). Выходные сигналы: ZAPrVmin - сигнал на запрет уборки механизации (0 - уборка механизации запрещена; 1 - уборка механизации разрешена); signal - номер сообщения; Vmintek-минимальная скорость для текущего положения закрылков.
Блок формирования сигнала на уборку механизации формирует максимально допустимое значение положения механизации Xmах. Если текущая скорость становится больше допустимой для данного положения механизации, то формируется команда на уборку механизации в положение Xmах, для которой данная скорость допустима. Формируется сообщение о превышении допустимой скорости для текущего положения механизации и необходимости убрать закрылки. Входные сигналы: VCAS - приборная скорость; номер положения механизации. Параметры: начало гистерезиса; ширина гистерезиса; массив допустимых скоростей для соответствующего положения механизации. Выходные сигналы: Xmах - максимально допустимое значение положения механизации; signal - номер сообщения от блока «ALDCS_Vmaxl».
Блок формирования сигнала на запрет изменения положения механизации при взлете формирует сигнал на запрет изменения положения механизации. Механизация может быть переведена в другое положение после достижения минимально допустимой высоты или если время полета превышает заданное время tmin. Формируется сообщение о запрете изменения положения механизации при положении командной ручки, не совпадающем с положением текущего положения механизации. Входные сигналы: радиометрическая высота, номер положения механизации; признак обжатия шасси [0 1]; VCAS - приборная скорость; номер текущего положения закрылков. Параметры: время отключения запрета уборки механизации; массив углов отклонения закрылков; массив индексов углов отклонения закрылков; зона нечувствительности; высота снятия запрета на изменение положения механизации. Выходные сигналы: сигнал запрета на изменение положения механизации (0 - изменение положения механизации запрещено; 1 - изменение положения механизации разрешено); сообщение блока формирования сигнала на запрет изменения положения механизации при взлете.
Блок формирования сигнала на автоматический выпуск механизации в положение "1" формирует сигнал при полете в крейсерской конфигурации на выпуск механизации в положение "1", если скорость менее определенной (заданной) величины. Механизация автоматически убирается (если ручка управления механизацией находится в положении "0") при увеличении скорости более определенной (заданной) величины на dV370 - заданное значение приращения скорости. Входные сигналы: VCAS - приборная скорость; номер положения механизации. Параметры: V_370_ASUMKM - скорость переключения режимов; V_375_ASUMKM -скорость переключения режимов. Выходные сигналы: Xmin - максимально допустимое значение положения выпуска механизации; signal - сообщение блока формирования сигнала на автоматический выпуск механизации в положение "1".
Блок выбора ограничений отменяет сформированные сигналы ограничений на положение механизации при нахождении самолета на стартовой позиции: при наличии обжатия стоек шасси и значении приборной скорости менее минимально возможной. Блок также формирует сообщение о невзлетном положении механизации в случае, когда двигатель работает на взлетном режиме, а положение механизации не соответствует взлету. Входные сигналы: признак обжатия шасси [0 1]; VCAS - приборная скорость; Xmin - допустимое значение положения уборки механизации; Xmах - допустимое значение положения выпуска механизации; сигнал на запрет уборки механизации (0 - уборка механизации запрещена; 1 - уборка механизации разрешена); сигнал на запрет изменения положения механизации (0 - изменение механизации запрещено; 1 - изменение механизации разрешено); номер положения механизации; положение РУДов. Параметры: скорость переключения режимов; взлетное положение РУДов. Выходные сигналы: Xmin - допустимое значение положения уборки механизации; Xmах - допустимое значение положения выпуска механизации; сигнал на запрет уборки механизации (0 - уборка механизации запрещена; 1 - уборка механизации разрешена); сигнал на запрет изменения положения механизации (0 - изменение механизации запрещено; 1 - изменение механизации разрешено); номер сообщения от блока выбора ограничений.
Блок формирования командного сигнала формирует командный сигнал в виде номера отклонения механизации. Результирующий сигнал зависит от значения текущего положения закрылков и ограничений, сформированных вышеописанными блоками, и сигнала - признака наличия льда. Входные сигналы: номер положения механизации; Xmin - допустимое значение положения уборки механизации; Xmах - допустимое значение положения выпуска механизации; признак обжатия шасси [0, 1]; VCAS - приборная скорость; сигнал на запрет уборки механизации; номер текущего положения закрылков; номер, выбираемый в зависимости от варианта обледенения и режима работы системы противообледенения. Выходные сигналы: номер заданного положения механизации.
Блок расчета Cymax формирует вектор значений Cymах для текущего положения механизации и убранной на соседнюю позицию. Входные сигналы: М - число Маха; сигнал обжатия основных стоек шасси [0, 1]; номер, выбираемый в зависимости от варианта обледенения и режима работы системы противообледенения; текущее положение механизации крыла. Параметры: расчетная продолжительность этапа взлета; коэффициент передачи; массивы для определения вектора значений Су для различных вариантов конфигурации крыла в зависимости от типа обледенения: зависимости по числу М; зависимости по отклонению закрылков; зависимости по отклонению предкрылков. Выходные сигналы: Су - вектор значений {Суmах (N-1), Cymax текущее}.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2644842C2 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| АВТОПИЛОТ ДЛЯ САМОЛЕТОВ МАЛОЙ АВИАЦИИ | 2024 |
|
RU2832351C1 |
| Способ управления полетом летательного аппарата | 2015 |
|
RU2617869C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ САМОЛЕТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2392186C2 |
Изобретение относится к бортовым системам дистанционного управления воздушным судном, в частности самолетом. Система содержит блок алгоритмов реконфигурации, блок выработки сигналов деградации режимов управления в формирование сообщений, блок расчета динамических коэффициентов, блок фильтрации входных сигналов, блок активации функции
αfloor, блок выработки сигнала отключения автопилота, блок управления рулем высоты, блок управления стабилизатором, блок управления рулем направления, блок управления элеронами, блок управления многофункциональными спойлерами и тормозными щитками и блок управления механизацией крыла. Система осуществляет выдерживание взаимного положения закрылков и предкрылков в соответствии с фиксированными положениями рукоятки управления механизацией в основном и резервном режимах работы, а также защиту механизации крыла от чрезмерных нагрузок. Обеспечиваются защита от превышения контролируемых параметров предельных значений, включение максимального режима работы двигателя при приближении к углам сваливания, ограничение угла атаки, максимальной и минимальной перегрузки nу, отрицательного угла тангажа, защита хвостовой части фюзеляжа от ударов о поверхность ВПП на взлете, балансировка в продольном канале, стабилизация углового положения самолета по тангажу и крену при отсутствии вмешательства летчика в управление, компенсация возмущения по моменту тангажа при изменении положения механизации крыла, режима работы двигателя и выпуске интерцепторов, отработка сигналов автоматической системы управления полетом, формирование командного сигнала на отклонение механизации крыла от ручки управления с учетом полетных ограничений. 1 з.п. ф-лы. 6 ил.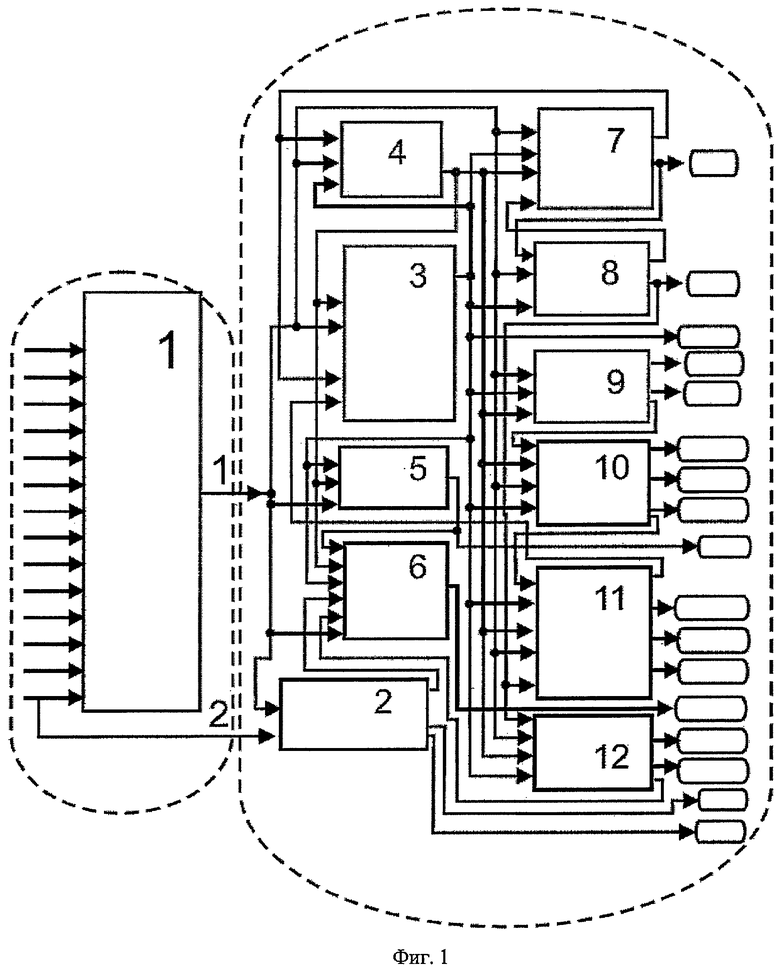
1. Система дистанционного управления летательным аппаратом, содержащая:
блок алгоритмов реконфигурации,
блок выработки сигналов деградации режимов управления в формирование сообщений,
блок расчета динамических коэффициентов,
блок фильтрации входных сигналов,
блок активации функции αfloor,
блок выработки сигнала отключения автопилота,
блок управления рулем высоты,
блок управления стабилизатором,
блок управления рулем направления,
блок управления элеронами,
блок управления многофункциональными спойлерами и тормозными щитками,
блок управления механизацией крыла,
причем к входам блока алгоритмов реконфигурации и блока выработки сигналов деградации режимов управления в формирование сообщений подсоединены выходы датчиков, в том числе датчиков внешних бортовых информационных систем, выходы блока алгоритмов реконфигурации непосредственно соединены с входами блока выработки сигналов деградации режимов управления в формирование сообщений, блока расчета динамических коэффициентов, блока фильтрации входных сигналов, блока выработки сигнала отключения автопилота, блока управления рулем высоты, блока управления стабилизатором, блока управления рулем направления, блока управления элеронами, блока управления многофункциональными спойлерами и тормозными щитками и блока управления механизацией крыла, при этом выходы блока расчета динамических коэффициентов соединены с входом блока фильтрации входных сигналов, с входом блока активации функции αfloor и входом блока выработки сигнала отключения автопилота, другой вход которого соединен с выходом блока активации функции αfloor и выходом блока фильтрации входных сигналов, другой выход которого соединен с входом блока управления рулем высоты, входом управления рулем направления и входом блока управления элеронами, кроме того, выход блока управления рулем высоты соединен с входом блока управления стабилизатором, выход которого соединен с входом блока управления рулем высоты, а также другой выход блока управления стабилизатором соединен с входом блока управления многофункциональными спойлерами и тормозными щитками и с входом блока управления механизацией крыла, кроме того, выход блока управления рулем направления соединен с входом блока управления элеронами.
2. Система по п.1, отличающаяся тем, что в ней блок управления рулем высоты содержит двадцать один блок, а именно блок коррекции сигналов по углу тангажа, блок коррекции сигналов по углу атаки, блок формирования корректирующих сигналов, блок ограничения скорости и числа Маха, блок ограничения отрицательного угла тангажа, блок формирования командных сигналов от ручки с учетом ограничений, блок формирования управляющего сигнала для неинтегрального контура управления, блок формирования управляющего сигнала для интегрального контура управления, блок стабилизации угла тангажа, блок вычисления параметра подъемной силы, блок ограничения угла атаки, блок ограничения положительного угла тангажа, блок формирования управляющих сигналов замкнутого контура, блок весовой компенсации, блок управления углом атаки, блок управления углом тангажа; блок защиты от ударов хвостом на взлете, блок прямого управления, блок позиционного управления, блок интегрального управления, блок суммирования, при этом первый выход блока ограничения скорости и числа Маха соединен с первым входом блока формирования командных сигналов от ручки управления с учетом ограничений, второй вход которого соединен с выходом блока ограничения отрицательного угла тангажа, первый выход блока формирования командных сигналов от ручки управления с учетом ограничений соединен с входом блока формирования управляющего сигнала для неинтегрального контура управления, а второй выход блока формирования командных сигналов от ручки управления с учетом ограничений соединен с входом блока формирования управляющего сигнала для интегрального контура управления, выход блока коррекции сигналов по углу тангажа соединен с первым входом блока формирования корректирующих сигналов, второй вход которого соединен с выходом блока коррекции сигнала по углу атаки, первый и второй выходы блока формирования корректирующих сигналов соединены соответственно с первым и вторым входами блока формирования управляющих сигналов замкнутого контура, третий вход которого соединен с блоком формирования управляющего сигнала для неинтегрального контура управления, четвертый вход блока формирования управляющих сигналов замкнутого контура соединен с выходом блока формирования управляющего сигнала для интегрального контура управления, первый выход блока стабилизации угла тангажа соединен с пятым входом блока формирования управляющих сигналов замкнутого контура, шестой вход которого соединен со вторым выходом блока стабилизации угла тангажа и четвертым входом блока интегрального управления, пятый вход которого соединен с выходом блока вычисления параметра подъемной силы, первый выход блока ограничения угла атаки соединен с шестым входом блока интегрального управления и четвертым входом блока позиционного управления, второй выход блока ограничения угла атаки соединен с входом блока весовой компенсации, третий выход блока ограничения угла атаки соединен с седьмым входом блока интегрального управления, восьмой и девятый входы которого соединены соответственно с первым и вторым выходами блока ограничения положительного угла тангажа, первый выход блока формирования управляющих сигналов замкнутого контура соединен с входом блока прямого управления и первым входом блока позиционного управления, второй выход блока формирования управляющих сигналов замкнутого контура соединен со вторым выходом блока позиционного управления и первым входом блока интегрального управления, третий выход блока формирования управляющих сигналов замкнутого контура соединен с третьим входом блока позиционного управления и вторым входом блока интегрального управления, третий вход которого соединен с четвертым выходом блока формирования управляющих сигналов замкнутого контура, выход блока весовой компенсации соединен с первым входом блока суммирования, второй вход которого соединен с выходом блока управления угла атаки, выход блока управления углом тангажа соединен с третьим входом блока суммирования, четвертый вход которого соединен с выходом блока защиты от ударов хвостом на взлете, выход блока прямого управления соединен с пятым входом блока суммирования, шестой вход которого соединен с выходом блока позиционного управления, седьмой вход блока суммирования соединен с выходом блока интегрального управления, а восьмой вход блока суммирования соединен с выходом блока ограничения угла атаки.
| Прибор для подогрева воздуха отработавшими газам и двигателя | 1921 |
|
SU320A1 |
| Н.Н.Зайцева | |||
| - М.: ЦАГИ, 1993, с.59-69 | |||
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| МНОГОЦЕЛЕВОЙ ВЫСОКОМАНЕВРЕННЫЙ СВЕРХЗВУКОВОЙ САМОЛЕТ, ЕГО АГРЕГАТЫ ПЛАНЕРА, ОБОРУДОВАНИЕ И СИСТЕМЫ | 1996 |
|
RU2207968C2 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| Станок для упаковки сортового железа | 1930 |
|
SU22564A1 |
| Устройство для волочения биметаллической проволоки | 1980 |
|
SU899190A1 |
| Силовой преобразователь | 2018 |
|
RU2692687C1 |
| US 5936318 А, 10.08.1999 | |||
| US 6209821 B1, 03.04.2001. | |||

