Изобретение относится к навигационному оборудованию и может быть использовано для определения навигационно-топогеодезических данных на подвижных объектах военной техники различной функциональной направленности, размещенных на базе шасси транспортных средств, при условии обеспечения информационного взаимообмена между системой топопривязки и навигации и исполнительными механизмами объекта.
Известна универсальная система топопривязки и навигации (см. патент РФ №2469271, опубл. 10.12.2012 г., бюл. №34), принятая за прототип. Универсальная система топопривязки и навигации устанавливается на шасси и содержит аппаратуру топопривязки и навигации. Система топопривязки и навигации состоит из базовой инерциальной системы наземной навигации, включающей в себя автономную навигационную аппаратуру, размещаемую непосредственно на шасси, навигационную аппаратуру потребителей спутниковых навигационных систем, блок согласования, которые имеют каналы информационного обмена для связи с программно-аппаратным комплексом, универсальный механический датчик скорости, электрически связанный с блоком согласования, систему определения высоты, имеющую канал информационного обмена для связи с программно-аппаратным комплексом, датчик скорости доплеровский, связанный с блоком согласования.
Недостатками универсальной системы топопривязки и навигации являются:
- ограниченные возможности применения;
- невозможность использования без значительных изменений аппаратуры навигации и топопривязки в комплексах вооружений, имеющих различную функциональную направленность;
- сложность алгоритмов информационного взаимодействия составных частей системы;
- недостаточная точность определения топогеодезических параметров.
Предлагаемым изобретением решается задача по повышению боевой эффективности подвижных объектов военной техники, оснащенных сложными техническими системами для выполнения задач по назначению.
Технический результат, получаемый при осуществлении изобретения, заключается в создании системы топопривязки и навигации в составе объекта военной техники, обеспечивающей высокую точность определения топогеодезических параметров в составе сложных подвижных объектов военной техники, высокое быстродействие и пропускную способность информационно-вычислительной системы, высокоэффективное информационное взаимодействие с вычислителем автоматизированного рабочего места и техническими системами объекта военной техники.
Указанный технический результат достигается тем, что в предлагаемой системе топопривязки и навигации в составе объекта военной техники, содержащей автономную навигационную аппаратуру, навигационную аппаратуру потребителей спутниковых навигационных систем, механический датчик скорости, систему определения высоты, датчик скорости доплеровский, которые имеют каналы информационного обмена для связи с программно-аппаратным комплексом, новым является то, что автономная навигационная аппаратура размещается на подъемно-исполнительном устройстве, которое установлено на шасси объекта военной техники, и выполнена с возможностью работы в походном положении при опущенном подъемно-исполнительном устройстве и жестком его закреплении на корпусе шасси, в процессе подъема/опускания и вертикалирования подъемно-исполнительного устройства, в поднятом положении подъемно-исполнительного устройства, программно-аппаратный комплекс системы связан с вычислителем автоматизированного рабочего места объекта военной техники, а информационные каналы функционируют в соответствии с протоколом обмена по сети Ethernet между системой топопривязки и навигации и объектом военной техники, информация для обмена по сети Ethernet адаптирована к выполняемым задачам по назначению и в режиме навигации содержит следующие сообщения: 0хА000 - запрос/ответ по дате/времени, 0хВ000 - запрос/ответ координат, 0хС000 - данные по районам для прокладки маршрута, 0xD000 - маршрут движения при задании с автоматизированного рабочего места оператора, 0хЕ000 - запрос/ответ по углам крена и тангажа, 0xF000 - запрос/ответ по функциональному контролю составных частей системы топопривязки и навигации, 0xF100 - запрос/ответ по времени наработки.
Выполнение автономной навигационной аппаратуры с возможностью работы в походном положении при опущенном подъемно-исполнительном устройстве и жестком его закреплении на корпусе шасси, в процессе подъема/опускания и вертикалирования подъемно-исполнительного устройства, в поднятом положении подъемно-исполнительного устройства, позволяет:
- обеспечить выполнение всех традиционных задач навигации для наземных транспортных средств в различных условиях эксплуатации;
- адаптировать систему топопривязки и навигации за счет программных средств для выполнения задач по назначению объектом военной техники, связанных с ориентированием подъемно-исполнительного устройства;
- исключить установку дополнительной системы ориентирования конкретно для подъемно-исполнительного устройства;
- в конечном итоге, упростить систему управления подъемно-исполнительным устройством.
Реализация связи программно-аппаратного комплекса системы с вычислителем автоматизированного рабочего места объекта военной техники позволяет:
- организовать информационный взаимообмен между вычислителем автоматизированного рабочего места объекта военной техники и системой топопривязки и навигации;
- включить систему топопривязки и навигации в единое информационное поле объекта военной техники.
Функционирование информационных каналов между системой топопривязки и навигации и объектом военной техники в соответствии с протоколом обмена по сети Ethernet в режиме навигации позволяет:
- обеспечить работу с цифровыми картами местности различных масштабов: загрузку в программно-аппаратный комплекс файлов с картами в количестве, необходимом для работы в заданном районе, отображение на карте местоположения объекта военной техники и направления его движения, автоматическую смену листов карт любого масштаба при выходе координат за их границу, прокладку предполагаемого маршрута движения по заданным контрольным точкам, хранение ранее проложенных маршрутов в памяти компьютера системы, нанесение на карту дополнительных объектов, отображение координат X, Y и Н точек, отмеченных маркером оператора;
- обеспечивать определение и отображение на стоянке и в движении плоских прямоугольных координат (система координат 1942 г.) при использовании информации о скорости от механического и доплеровского датчиков скорости и непрерывной коррекции по сигналам от аппаратуры спутниковой навигации и системы определения высоты;
- обеспечивать определение и отображение начального дирекционного угла продольной оси объекта при различном положении подъемно-мачтового устройства по данным с автономной навигационной аппаратуры;
- обеспечивать определение и отображение на стоянке и в движении углов крена и тангажа;
- обеспечить необходимую частоту обновления выдаваемой информации;
- обеспечить отображение результатов функционального контроля составных частей, времени наработки, текущего режима работы системы.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
Сущность изобретения поясняется чертежами, где на фиг.1 показана структурная схема СТПН; на фиг.2 - алгоритм функционирования СТПН в составе ОВТ.
Система топопривязки и навигации (СТПН) 1 в составе объекта военной техники (ОВТ) 2 содержит автономную навигационную аппаратуру (AHA) 3, аппаратуру спутниковой навигации (АСН) 4, которая состоит из блока электронного (БЭ) 5 и модуля антенного (МА) 6, систему определения высоты (СОВ) 7, которая состоит из датчика температуры (ДТ) 8, измерителя цифрового атмосферного давления (ИЦАД) 9 и блока обработки данных (БОД) 10, датчика скорости доплеровского (ДСД) 11, программно-аппаратного комплекса (ПАК) 12, который состоит из панельного компьютера (ПК) 13 и манипулятора (М) 14. ПАК 12 связан с AHA 3, СОВ 7, ДСД 11, МДС 15 и вычислителем автоматизированного рабочего места (АРМ) 16, входящими в состав ОВТ 2. ОВТ 2 оснащен подъемно-исполнительным устройством (ПИУ) 17, на котором установлена AHA 3.
Система топопривязки и навигации в составе объекта военной техники функционирует следующим образом.
Работа СТПН 1 построена на обработке входных данных, поступающих от составных частей, входящих в ее состав. Входными данными для решения навигационных задач являются:
- значение скорости ОВТ 2 (определяется в ПК 13 по сигналам МДС 15 и ДСД 11);
- значения дирекционного угла продольной оси αАНА, углов крена φАНА и тангажа ψАНА, определенные AHA;
- значения координат ХАСН, YACH, НАСН, проекций скорости и времени t, определенные АСН 4.
Обработка данных осуществляется специальным программным обеспечением (СПО), установленным на ПК 13. СПО обеспечивает:
- решение прямой и обратной навигационных задач с использованием данных, поступающих от составных частей системы - режим «Навигация»;
- контроль функционального состояния составных частей - режим «Состояние»;
- калибровку и настройку (выбор начальных параметров системы) - режим «Тех. обслуживание»;
- загрузку по интерфейсу Ethernet цифровых карт местности (ЦКМ), прокладку маршрута на ЦКМ, отображение местоположения и маршрута движения ОВТ 2 - режим «Работа с картой».
СТПН 1 устанавливается на ОВТ 2, который для выполнения задач по назначению оснащен ПИУ 17. На ПИУ 17 размещена AHA 3. AHA 3 работает при любом штатном положении ПИУ 17: в походном положении ПИУ 17 опущено и жестко связано с корпусом шасси ОВТ 2, в процессе подъема (опускания) и вертикалирования ПИУ 17, в рабочем (поднятом) положении.
ПАК 12 системы связан с вычислителем АРМ 16 ОВТ 2, а информационные каналы функционируют в соответствии с протоколом обмена по сети Ethernet между СТПН 1 ОВТ 2.
При обмене по сети Ethernet в режиме навигации используется протокол TCP/IP. СТПН является клиентом. Сетевые адреса, маска сети и порт настраиваются.
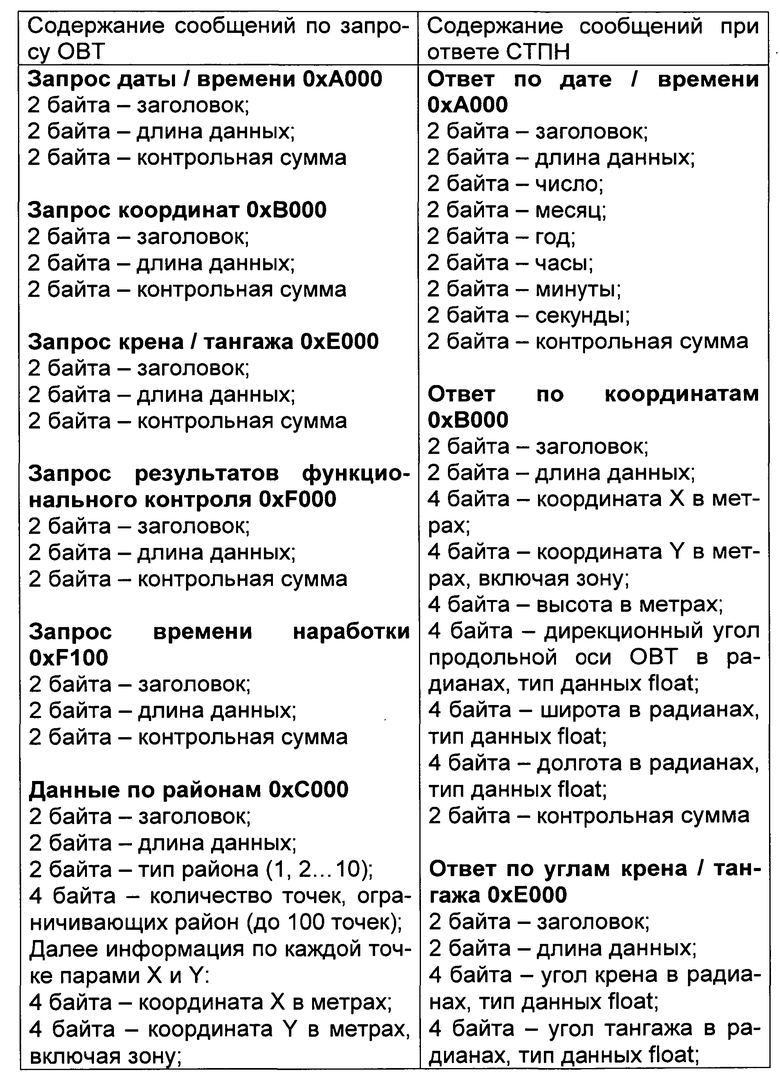
1. Формат сообщения для обмена по сети Ethernet:
[заголовок] [длина данных] [{поле данных}…{поле данных}] [контрольная сумма]
Длина данных (размер поля 2 байта) - сумма длин полей «поле данных» в байтах. При отсутствии полей «поле данных» в кодограмме длина данных равна нулю.
Контрольная сумма (размер поля 2 байта) считается как сумма по модулю 2 всех шестнадцатиразрядных слов (соответственно типы int и float длиной 32 бита для подсчета контрольной суммы представляют собой два слова). Поле «заголовок» и поле «длина данных» участвуют в подсчете контрольной суммы.
По умолчанию каждое поле данных длиной 4 байта представлено типом int размером 32 бита, поле данных размером 2 байта -типом short 16 бит.
Порядок следования байт - big - endian, от старшего к младшему (например, число 0xA1B2C3D4 представляется как 0хА1, 0хВ2, 0хС3, 0xD4).
2. Заголовки сообщений:
- 0хА000 - запрос/ответ по дате/времени;
- 0хВ000 - запрос/ответ по координат;
- 0хС000 - данные по районам (заражения, затопления и т.д. для прокладки маршрута с учетом районов);
- 0xD000 - маршрут движения (при задании от автоматизированного рабочего места ОВТ);
- 0хЕ000 - запрос/ответ по углам крена/тангажа;
- 0xF000 - запрос/ответ по функциональному контролю составных частей СТПН;
- 0xF100 - запрос/ответ по времени наработки СТПН.

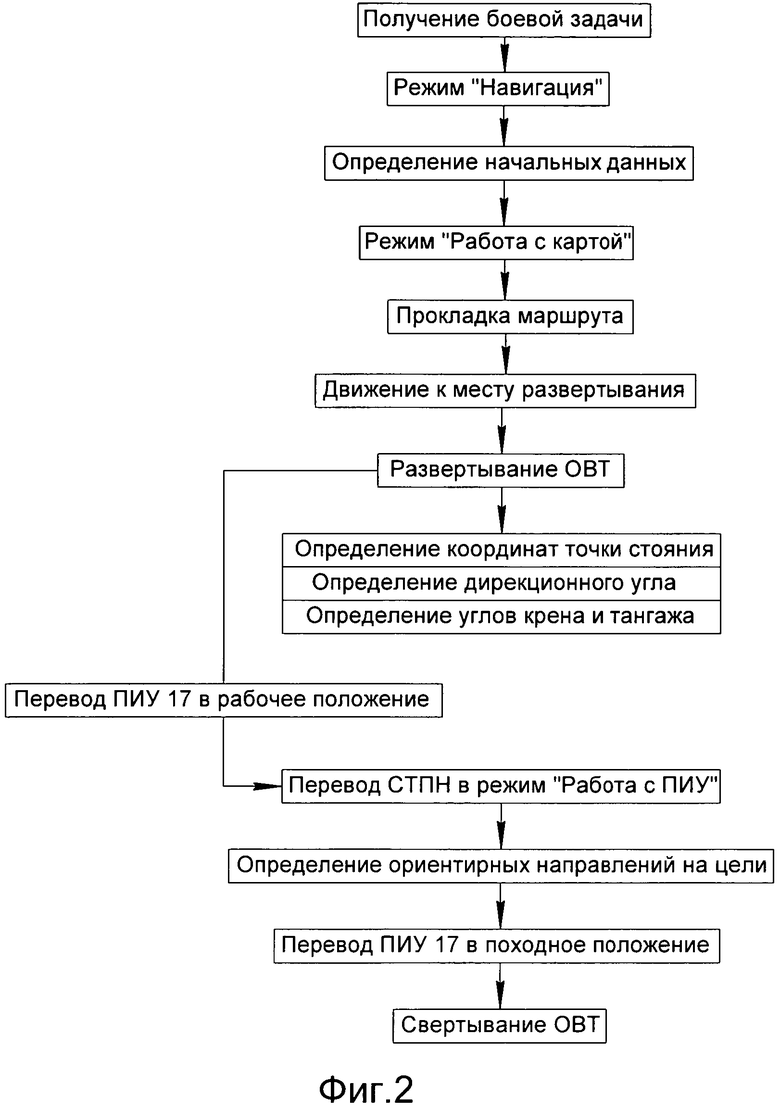
Алгоритм функционирования СТПН 1 в составе ОВТ 2 выглядит следующим образом.
После получения боевой задачи и выполнения мероприятий по подготовке СТПН 1 к работе ОВТ 2 выдвигается на начальную точку, где выполняется задача по определению начальных данных: координат начальной точки, дирекционного угла продольной оси ОВТ 2. Для этого СТПН 1 переводится в режим работы «Навигация».
В режиме «Навигация» выбирается используемый источник дирекционного угла и начальных значений координат X, Y и высоты Н. В СТПН 1 для решения навигационных задач используется дирекционный угол продольной оси ОВТ 2, определенный с помощью AHA 3. Координаты исходного пункта определяют относительно государственной геодезической сети (ГГС), специальной геодезической сети (СГС), точек с впечатанными координатами на карте, контурных точек местности или от АСН 4.
Далее СТПН 1 переводится в режим «Работа с картой», на ЦКМ осуществляется прокладка наиболее оптимального маршрута и начинается движение ОВТ 2 к месту развертывания. Во время движения на экране ПК 13 выводятся:
- текущие координаты, высота, дирекционный угол, скорость, пройденный путь ОВТ 2;
- название района и исходный масштаб листа ЦКМ, количество листов в районе, текущее время.
По прибытии на место развертывания СТПН 1 определяет координаты точки стояния, дирекционный угол продольной оси ОВТ 2, углы крена и тангажа.
ПИУ 17 переводится из походного положения в рабочее. СТПН 1 по команде оператора переходит в режим «Работа с ПИУ». ОВТ 2 начинает выполнять задачи по назначению: наведение и определение ориентирных направлений на цели, местоположение которых определяется при помощи технических средств, размещенных на ОВТ 2.
После завершения выполнения задач по назначению ПИУ 17 переводится в походное положение, ОВТ 2 по ранее проложенному на ЦКМ маршруту возвращается к месту базирования или выдвигается к новому месту развертывания.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании системы топопривязки и навигации в составе объекта военной техники, обеспечивающей высокую точность определения топогеодезических параметров в составе сложных подвижных объектов военной техники, высокое быстродействие и пропускную способность информационно-вычислительной системы, высокоэффективное информационное взаимодействие с вычислителем автоматизированного рабочего места и техническими системами объекта военной техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ | 2012 |
|
RU2498221C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ МОБИЛЬНОГО КОМПЛЕКСА НАВИГАЦИИ И ТОПОПРИВЯЗКИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ | 2010 |
|
RU2436042C1 |
| Программно-аппаратные средства комплекса топопривязки и навигации | 2016 |
|
RU2640316C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| СПОСОБ ПРИМЕНЕНИЯ УНИВЕРСАЛЬНОЙ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ | 2012 |
|
RU2487316C1 |
| УНИВЕРСАЛЬНЫЙ ТОПОПРИВЯЗЧИК (УТП) НА БАЗЕ ЛЕГКОВОГО ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2009 |
|
RU2413637C1 |
| ИНФОРМАЦИОННО-АНАЛИТИЧЕСКИЙ КОМПЛЕКС НАЗЕМНОГО ПОДВИЖНОГО ОБЪЕКТА | 2010 |
|
RU2428660C1 |
| УНИВЕРСАЛЬНАЯ СИСТЕМА ТОПОПРИВЯЗКИ И НАВИГАЦИИ | 2011 |
|
RU2469271C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА В СОСТАВЕ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ВОЙСКАМИ | 2012 |
|
RU2511207C1 |
Изобретение относится к навигационному оборудованию и может быть использовано для определения навигационно-топогеодезических данных на подвижных объектах военной техники. Система топопривязки и навигации в составе объекта военной техники содержит автономную навигационную аппаратуру, навигационную аппаратуру потребителей спутниковых навигационных систем, механический датчик скорости, систему определения высоты, датчик скорости доплеровский, которые имеют каналы информационного обмена для связи с программно-аппаратным комплексом. При этом автономная навигационная аппаратура размещается на подъемно-исполнительном устройстве, которое установлено на шасси. Программно-аппаратный комплекс системы связан с вычислителем автоматизированного рабочего места объекта военной техники, а информационные каналы функционируют в соответствии с протоколом обмена по сети Ethernet между системой топопривязки и навигации и объектом военной техники. Обеспечивается высокая точность определения топогеодезических параметров в составе сложных подвижных объектов военной техники. 2 ил.
Система топопривязки и навигации в составе объекта военной техники, содержащая автономную навигационную аппаратуру, навигационную аппаратуру потребителей спутниковых навигационных систем, механический датчик скорости, систему определения высоты, датчик скорости доплеровский, которые имеют каналы информационного обмена для связи с программно-аппаратным комплексом, отличающаяся тем, что автономная навигационная аппаратура размещается на подъемно-исполнительном устройстве, которое установлено на шасси объекта военной техники, и выполнена с возможностью работы в походном положении при опущенном подъемно-исполнительном устройстве и жестком его закреплении на корпусе шасси, в процессе подъема/опускания и вертикалирования подъемно-исполнительного устройства, в поднятом положении подъемно-исполнительного устройства, программно-аппаратный комплекс системы связан с вычислителем автоматизированного рабочего места объекта военной техники, а информационные каналы функционируют в соответствии с протоколом обмена по сети Ethernet между системой топопривязки и навигации и объектом военной техники, информация для обмена по сети Ethernet адаптирована к выполняемым задачам по назначению и в режиме навигации содержит следующие сообщения: 0хА000 - запрос/ответ по дате/времени, 0хВ000 - запрос/ответ координат, 0хС000 - данные по районам для прокладки маршрута, 0xD000 - маршрут движения при задании с автоматизированного рабочего места оператора, 0хЕ000 - запрос/ответ по углам крена и тангажа, 0xF000 - запрос/ответ по функциональному контролю составных частей системы топопривязки и навигации, 0xF100 - запрос/ответ по времени наработки.
| УНИВЕРСАЛЬНАЯ СИСТЕМА ТОПОПРИВЯЗКИ И НАВИГАЦИИ | 2011 |
|
RU2469271C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ПЕРЕВОЗОК ГРУЗОВ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТОМ | 2010 |
|
RU2466460C2 |
| УНИВЕРСАЛЬНЫЙ ТОПОПРИВЯЗЧИК (УТП) НА БАЗЕ ЛЕГКОВОГО ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2009 |
|
RU2413637C1 |

