Изобретение относится к системам радиосвязи и радиолокации, в частности к методам определения углового положения подвижного объекта (ПО) с помощью системы спутниковой связи с использованием процедур способа радиолокации с обнаружением "на просвет".
Известны системы спутниковой связи, состоящие из спутников-ретрансляторов с приемопередающими позициями и наземных приемо-передающих позиций, в состав которых входят штатные устройства обработки информации, причем наземные приемопередающие позиции соединены между собой и с центральной станцией наземной сетью передачи данных [1].
Однако с помощью типовой системы спутниковой связи обнаружить ПО и определить его координаты невозможно.
Для определения местоположения ПО и построения траектории его движения необходимо знать его угловое положение относительно наземной позиции с привязкой к точному времени, т.е. изменяющиеся угловые координаты, оценка которых связана с определением направления прихода отраженного от подвижного объекта сигнала (пеленгом).
Существуют различные способы определения направления прихода отраженного от ПО сигнала. Наиболее распространенными являются амплитудный и фазовый методы. В моноимпульсной радиолокационной (амплитудной) системе с рядом парциальных каналов, перекрывающих сектор обзора по одной из угловых координат, направление на ПО грубо определяется по номеру парциального канала, выходной сигнал которого имеет наибольшую амплитуду. Для уточнения и устранения неоднозначности используются значения амплитуд соседних каналов [2].
Аналогом предлагаемого устройства является бистатическая РЛС, представленная в Евразийском патенте №007143 [3]. Эта РЛС состоит из передающей и удаленной от нее приемной позиций. Передающая позиция включает передатчик непрерывного квазигармонического сигнала и слабонаправленную антенну, облучающую одновременно весь спектр существования просветного эффекта. Антенна приемной позиции - многолучевая, с многолучевой диаграммой направленности (ДН), охватывающая весь сектор существования просветного эффекта. Центральный луч ДН приемной антенны своим максимумом направлен на антенну передающей позиции, а два других луча отклонены от центрального луча, перекрывая зону просветного эффекта. Приемная антенна принимает прямой и отраженный от ПО 8 сигналы, которые поступают на N приемных каналов, состоящих из последовательно соединенных приемника, устройства режекции прямого сигнала передатчика и пассивных помех и блока измерения частоты Доплера. Выходы всех блоков измерения частоты Доплера соединены с входами блока измерения пеленга. Измерение угловых координат объекта производится в блоке измерения пеленга по соотношению амплитуд в разных приемных каналах. В блоке осуществляется сравнение амплитуд сигналов соответствующих доплеровских фильтров, расположенных в блоках измерения доплеровской частоты, разных приемных каналов, определение канала с наибольшим сигналом и канала с сигналом, по величине следующим за максимальным. Грубое значение координат определяется номером приемного канала с наибольшим сигналом. Уточнение производится моноимпульсным методом в соответствии с пеленгационной характеристикой приемной антенны по соотношению амплитуд сигналов с наибольшей амплитудой и с амплитудой наибольшего «соседа».
Недостатком аналога является то, что зондирующий непрерывный сигнал с передающей позиции не несет полезную информацию, для реализации которой, а, именно функции ретрансляции сообщений или других специальных процедур, и запускаются космические аппараты.
Наиболее близким аналогом предлагаемого способа и устройства является радиолокационный способ определения углового положения ПО [4], основанный на излучении наземной передающей позицией многочастотного многолучевого зондирующего сигнала, частоты которого отличаются на величину, большую максимального значения доплеровской частоты, приеме удаленной приемной позицией прямого и отраженного от ПО сигналов параллельным набором приемных парциальных каналов, соответствующих количеству излучаемых сигналов и настроенных на одну из несущих частот зондирующего сигнала, выделении из принятых сигналов путем детектирования интерференционного сигнала биений, режекции прямого сигнала передатчика и пассивных помех, измерении частоты интерференционного сигнала и определении направления прихода сигнала с передающей позиции на ПО моноимпульсным методом путем сравнения амплитуд сигналов в приемных парциальных каналах на одной и той же приведенной к какому-либо каналу доплеровской частоте, равной измеренной в 1-ом канале доплеровской частоте, умноженной на отношение несущих частот сигнала канала, относительно которого происходит приведение, и 1-го приемного канала.
Устройство для определения углового положения подвижного объекта по этому способу содержит наземную передающую позицию в составе последовательно включенных передатчика и передающей антенны и космическую приемную позицию, в состав которой входят приемная антенна, N приемников и включенных последовательно с ними N устройств режекции прямого сигнала передатчика и пассивных помех и N блоков определения доплеровской частоты, выходы которых подключены к блоку определения пеленга. Передатчик устройства является многочастотным, передающая антенна формирует N парциальных лучей, частоты которых отличаются на величину, большую максимальной величины доплеровской частоты, а приемная антенна формирует один «широкий» луч, перекрывающий всю зону обзора, кроме того, на приемной позиции между антенной и N приемниками введены N полосовых фильтров, частоты которых соответствуют частотам излучаемых зондирующих сигналов.
Недостатками способа и устройства-прототипа, как и аналогов, являются
зондирующий непрерывный сигнал с передающей позиции не несет полезную информацию, для реализации которой, а именно функции ретрансляции сообщений или других специальных процедур, и запускаются космические аппараты;
полученные на космическом аппарате данные о координатах обнаруженных ПО далее не обрабатываются и не передаются потребителям информации;
из-за необходимости сокращения массы оборудования на космических аппаратах трудно обеспечить высококачественную обработку информации, так как известно, что наземные радиолокаторы, построенные по технологии «на просвет», обычно размещают в кузовах-фургонах со своими антенно-мачтовыми устройствами и дизельными агрегатами, например, наземная «просветная» РЛС «Струна».
Технический результат изобретения - упрощение использования за счет стандартных процедур систем спутниковой связи для однозначного и точного определения траектории движения подвижного объекта за счет измерения его угловых координат методами радиолокации «на просвет» относительно наземной приемной позиции с размещением передающей позиции на борту космического аппарата, а приемной - на земле.
Указанный технический результат достигается тем, что в известный способ использования радиосигналов системы спутниковой связи для определения положения подвижного объекта и система для его реализации, основанный на излучении передающей позицией многочастотного многолучевого радиосигнала, в состав которого вводят пилот-сигналы по числу лучей, а его частоты отличаются на величину, большую максимального значения доплеровской частоты, приеме удаленной приемной позицией прямого и отраженного от ПО радиосигналов параллельным набором приемных парциальных каналов, соответствующих количеству излучаемых сигналов и настроенных на одну из несущих частот радиосигнала, выделении из принятых сигналов путем детектирования интерференционного сигнала биений, режекции прямого сигнала передатчика и пассивных помех, измерении частоты интерференционного сигнала и определении направления прихода сигнала с передающей позиции на ПО моноимпульсным методом путем сравнения амплитуд сигналов в приемных парциальных каналах на одной и той же приведенной к какому-либо каналу доплеровской частоте, равной измеренной в 1-ом канале доплеровской частоте, умноженной на отношение несущих частот сигнала канала, относительно которого происходит приведение, и 1-го приемного канала, введены следующие процедуры: приемные позиции разносят в пространстве и соединяют между собой и с центральной станцией наземной сетью передачи данных, процедуры обработки сигналов на передающих и приемных позициях синхронизируют от меток единого времени, выделяют из принятых сигналов путем фильтрации доплеровских частот и далее детектирования интерференционного сигнала биений, в каждой приемной позиции в соответствующих лучах осуществляют прием прямого и отраженного от ПО радиосигналов параллельным набором приемных парциальных каналов, соответствующих количеству излучаемых на нее радиосигналов передающими позициями и настроенными на соответствующие частоты пилот-сигналов, число лучей приемных позиций выбирают по числу лучей, направленных на них с передающих позиций, находящихся в их зоне видимости и обеспечивающих «просветный» эффект, в каждой приемной позиции для любого ПО осуществляют сравнение амплитуд сигналов в приемных парциальных каналах на одной и той же приведенной к какому-либо каналу этой (или соседней) приемной позиции доплеровской частоте, затем на основании полученных с одной или нескольких приемных позиций измеренных координат ПО, привязанных к единым времени и системе координат, с учетом метода экстраполяции, на центральной станции строят траекторию движения ПО, в том числе и экстраполяционную, с привязкой к электронной карте местности, сведения о траектории передают получателю информации.
Указанный технический результат достигается также тем, что в известную систему для определения положения подвижного объекта с помощью радиосигналов системы спутниковой связи, содержащую передающую позицию в составе последовательно включенных штатного устройства обработки информации передающей позиции, передатчика и передающей антенны и приемную позицию, в состав которой входят приемная антенна, соединенные с ней параллельно штатное устройство обработки информации приемной позиции полосовых фильтров и N высокочастотных узкополосных фильтров, полосы частот которых соответствуют полосе частот спектра излучаемых радиосигналов, к которым в свою очередь подключены последовательно N приемников, N устройств режекции прямого сигнала передатчика и пассивных помех, а также N блоков определения доплеровской частоты, выходы которых подключены к блоку определения пеленга, передатчик является многочастотным, передающая антенна формирует N парциальных лучей, частоты которых отличаются на величину, большую максимальной величины доплеровской частоты, введено то, что В передающих позиций и М приемных позиций разнесены в пространстве, М приемных позиций соединены между собой и с центральной станцией наземной сетью передачи данных, имеющей соответствующий вход/выход, выходы N устройств режекции прямого сигнала передатчика и пассивных помех каждой приемной позиции подключены через N фильтров нижних частот к входам N блоков определения доплеровской частоты, бортовой приемник сигналов глобальных навигационных спутниковых систем с антенной на передающей позиции через соответствующий генератор тактовых импульсов подключен к штатному устройству обработки информации передающей позиции, а на приемных позициях наземный приемник сигналов глобальных навигационных спутниковых систем с антенной через соответствующий генератор тактовых импульсов подключен к синхровходам соответствующих N приемников, N устройств режекции прямого сигнала передатчика и пассивных помех, N фильтров нижних частот, N блоков определения доплеровской частоты, блока определения пеленга, приемная антенна формирует N «узких» лучей, перекрывающих всю зону «просветного» эффекта одной и зоны обзора двух соседних передающих позиций, N «узких» лучей каждой передающей антенны перекрывают всю зону «просветного» эффекта одной и двух соседних приемных позиций, вход/выход блока определения пеленга подключен к входу/выходу штатного устройства обработки информации приемной позиции, входы/выходы центральной станции и наземной сети передачи данных являются входами/выходами системы.
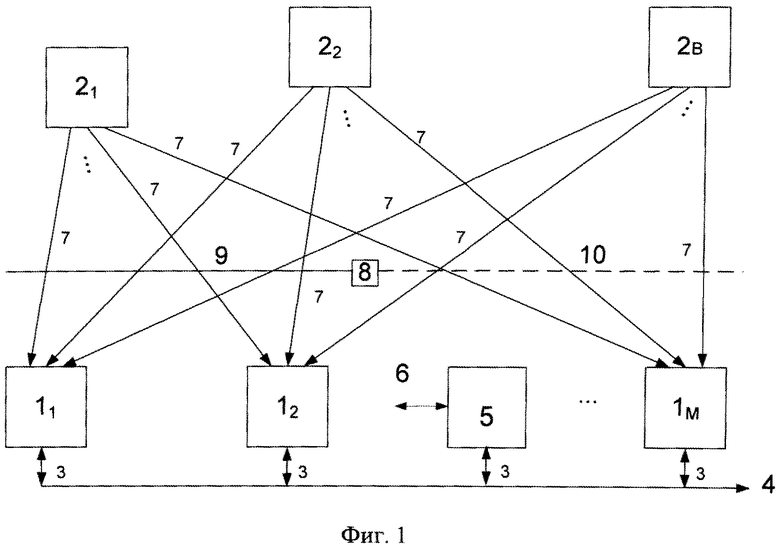
Суть предлагаемого способа заключается в следующем. Для однозначного и точного определения координат ПО за счет измерения угловых координат подвижного объекта методами радиолокации «на просвет» используется система, состоящая из разнесенных в пространстве передающих 2 (космических) и приемных 1 (наземных) позиций, соединенных между собой и с центральной станцией 5 наземной сетью 3 передачи данных, процедуры обработки сигналов на передающих и приемных позициях синхронизируют от меток единого времени [5, с. 197, рис. 1.1]. На передающей позиции 2 формируют многочастотный многолучевой радиосигнал, в состав которого входит пилот-сигнал, а частоты отличаются на величину, большую максимального значения доплеровской частоты. Центральные лучи диаграмм направленности приемной и передающей антенн своими максимумами направлены в сторону друг друга, а остальные лучи отклонены от центрального луча, перекрывая зону просветного эффекта. Лучи передающей позиции 2 облучают одновременно весь сектор существования просветного эффекта, включая основную и соседние с ней наземные приемные позиции 1, а лучи приемной позиции 1 - основную и соседние с ней передающие позиции 2 соответственно [6, с. 67, рис. 3.1]. Для подстройки диаграммы направленности антенны бортовой позиции и сохранения неизменного ее коэффициента направленного действия в штатном устройстве обработки 11 информации передающей позиции 2 для каждого канала (каждого луча) вводится известной формы пилот-сигнал, например синусоидальный сигнал с соответствующей фазой, занимающий минимальную полосу частот в заданном частотном спектре и легко выделяемый из известной полосы частот полезного сигнала [5, с. 550, рис. 12.28]. Поэтому эти сигналы. практически не изменяющиеся во времени, например, для геостационарных спутников связи, могут быть выбраны в качестве зондирующих, по аналогии с радиолокацией «на просвет». В приемных каналах, на выходе каждого из соответствующих приемников 17, появляются доплеровские биения частоты сигнала, возникающие при движении подвижных объектов 8 в просветной зоне между передатчиком и приемником. На выходе приемной (наземной) позиции 1 имеем полную ретранслируемую спутником информацию и угловые координаты подвижного объекта 8, пересекающего парциальные лучи передающих и приемных антенн, направленных друг на друга соответственно. Эти данные с привязкой к единому времени через штатное устройство 15 обработки информации приемной позиции 1 по каналам наземной сети 3 передачи данных поступают на центральную станцию 5, где с помощью вычислительной техники и известных в радиолокации методов формируются и объединяются траектории 9 движения ПО 8, привязываются к единой системе координат и электронной карте местности и разрабатываются экстраполированные траектории 10 движения. Полученные сведения об обнаруженных подвижных объектах 8 и параметрах их движения передаются от центральной станции 5 по входу/выходу 6 или по каналам наземной сети 3 передачи данных через ее вход/выход 4 соответствующим потребителям информации, которые могут сделать запрос по характеристикам любого ПО 8.
На фиг. 1 представлена структурная схема системы, реализующей заявляемый способ, и приняты следующие обозначения:
1 - приемная позиция в количестве М штук;
2 - передающая позиция в количестве В штук;
3 - вход/выход наземной сети передачи данных (НСПД) с входом/выходом 4;
5 - центральная станция с входом/выходом 6;
7 - условное изображение парциальных лучей передающей позиции 2;
8 - подвижный объект (ПО);
9 - траектория движения ПО 8, построенная на центральной станции 5 по измерениям приемных (наземных) позиций;
10 - экстраполированная траектория движения ПО 8, построенная на центральной станции 5.
На фиг. 2 представлена функциональная схема предлагаемой системы и приняты следующие обозначения:
11 - штатное устройство обработки информации передающей позиции [*, рис. 11.2 (позиции 9, 8, 6, 4, 2, 1)];
12 - передатчик;
13 - антенна передающей позиции;
14 - антенна приемной позиции;
15 - штатное устройство обработки информации приемной позиции;
16 - высокочастотные полосовые фильтры;
17 - приемник;
18 - устройство режекции прямого сигнала передатчика и пассивных помех;
19 - блок измерения доплеровской частоты;
20 - блок определения пеленга;
21 - фильтр нижних частот;
22 - бортовой генератор тактовых импульсов;
23 - бортовой приемник глобальных навигационных спутниковых систем с антенной;
24 - наземный приемник глобальных навигационных спутниковых систем с антенной;
25 - наземный генератор тактовых импульсов.
Пунктиром показаны условные границы зон формирования парциальных лучей передающей и приемной позицией, которые ограничивают сектор существования «просветного» эффекта.
Передающая позиция содержит бортовой приемник 23 глобальных навигационных спутниковых и бортовой генератор 22 тактовых импульсов, обеспечивающих синхронизацию процессов обработки информации и работу бортовых устройств в едином времени, штатное устройство 11 обработки информации передающей позиции, многочастотный передатчик 12 и передающую антенну 13, формирующую N парциальных лучей, каждый со своей несущей частотой и соответствующим пилот-сигналом. Узлы 23 и 22 необходимы для обеспечения единой синхронизации процессов обработки сигналов на передающей и приемной позициях. Например, изменения параметра пилот-сигнала при необходимости коррекции положения луча антенны 13 (фазы синусоиды), сведения и интервале времени их проведения о которых передаются на приемную позицию 1 для исключения обнаружения ложных подвижных объектов 8 [5].
На приемной позиции 1 имеются N парциальных лучей, каждый для своей полосы частот и соответствующего пилот-сигнала, которые должны перекрывать зону «своей» передающей позиции 2i и двух соседних 2i+1 и 2i-1. Поэтому полосы частот соседних передающих позиций 2 для обеспечения электромагнитной совместимости не перекрываются.
Приемная антенна 14, как и передающая 13 широкополосные. Полоса частот приемной антенны 14 соответствует всему диапазону несущих частот передатчиков 12: «своего» и двух соседних. На входе приемников 17 стоят полосовые фильтры 16, полоса частот которых много меньше интервала частот до первой гармоники передаваемого по этому каналу дискретного сообщения, а центральная частота каждого фильтра настроена на частоту соответствующего пилот-сигнала. Скорость передачи информации в луче определяется, в основном, выделяемой для канала полосой частот. Например, в системе «Орбита-2» полоса частот одного ствола составляет 34 МГц [6, с. 263].
Количество приемных каналов наземной приемной позиции 1 больше числа парциальных каналов передающей позиции 2, направленных на нее, так как часть каналов используются для приема радиосигналов с соседних передающих позиций 2. Каждый приемный канал состоит из последовательно соединенных приемника 17, устройства режекции 18 прямого сигнала передатчика и пассивных помех, фильтра 21 нижних частот и блока 7 определения доплеровской частоты, содержащего n доплеровских фильтров. Фильтр 21 нижних частот вырезает все высокочастотные составляющие, наведенные на пилот-сигнал в процессе передачи, и оставляет только интервал частот, в котором в вероятностном смысле ожидается появление соответствующего сигнала в одном или нескольких доплеровских фильтров. Выходы доплеровских фильтров каждого канала соединены с входами блока 19 определения пеленга. Моменты превышения сигналом заданного уровня порога на выходе каждого доплеровского фильтра в каждом луче привязываются к единому времени с помощью генератора 25 тактовых импульсов приемной позиции, синхронизируемого метками наземного приемника 24 глобальных навигационных спутниковых систем с антенной. Выходные данные N блоков 19 определения пеленга подаются на вход блока 20 определения углового положения ПО 8 и затем после известных процедур обработки через штатное устройство 15 обработки информации приемной позиции и наземную сеть 3 передачи данных поступают на вычислительные средства центральной станции 5 для построения известными в радиолокации методами траекторий движения ПО 8.
При известной форме парциального луча (пеленгационной характеристике передающей и приемной антенн) по соотношению амплитуд сигналов в каналах приемной позиции определяется направление прихода сигнала с передающей позиции на ПО 8.
В лучах передающей антенны 13, имеющих разные углы распространения, осуществляется излучение информационных радиосигналов и канальных пилот-сигналов. Это соответствует наличию N парциальных лучей передающей антенны, облучающих весь сектор существования «просветного эффекта» в соответствующей приемной позиции и двух соседних. Способы формирования многочастотных многолучевых радиосигналов представлены в [5, 7]. Частоты излучения парциальных лучей и пилот-сигналов должны отличаться на величину, большую максимальной величины доплеровского сдвига частоты сигнала, отраженного от ПО.
Сформированные на удаленной приемной позиции 1 парциальные лучи принимают в различные интервалы времени прямые и отраженные от ПО 8 радиосигналы парциальных лучей, а в них и пилот-сигналы передающей позиции 2. Сложение обеих компонент радиосигнала, прямого и отраженного, происходит в пространстве. На вход приемных каналов поступает суммарное колебание. Принятые радиосигналы отфильтровываются по частоте в фильтрах 16, каждый в свой приемник 17. В устройствах 18 режекции прямого сигнала и пассивных помех осуществляется подавление прямого радиосигнала передатчика и пассивных помех. В каждом приемном канале выделяются биения доплеровской частоты сигнала, возникающие при движении объектов в просветной зоне между передающими 2 и приемными 1 позициями, частота которых определяется в блоках 19 измерения доплеровской частоты. Определение угловых координат ПО 8 происходит путем сравнения амплитуды выделенных с помощью фильтров 21 нижних частот биений доплеровской частоты принятых пилот-сигналов от одного и того же ПО 8 в разных приемных каналах. Пилот-сигналы от одного и того же ПО 8 в разных приемных каналах имеют доплеровский сдвиг по частоте, равный согласно [4, 8]:
зависящий от несущей частоты сигнала в приемном канале,
где 
λi - длина волны радиосигнала в i-м приемном канале;
fi - несущая частота радиосигнала в i-м приемном канале;
с - скорость света;
R1, R2 - соответственно дальность от передающей позиции 2 до ПО 8 и от ПО 8 до приемной позиции 1.
Угловые координаты ПО 8 определяются путем сравнения амплитуды сигналов в разных приемных каналах на одной и той же «приведенной» к какому-либо каналу доплеровской частоты. Например, «приведенная» к первому приемному каналу доплеровская частота [4]:

В блоке 20 определения пеленга осуществляется сравнение амплитуд сигналов, имеющих одинаковую «приведенную» доплеровскую частоту в разных приемных каналах, определение каналов с наибольшим сигналом и сигналом, по амплитуде следующим за ним.
Реализация многочастотной передающей позиции, т.е. одновременное излучение N радиосигналов с различными несущими частотами и в разных направлениях может быть осуществлено, например, на основе бортового ретрансляционного комплекса «НордМедиаСтар» [5, с. 701, таблица 20.2]. Он имеет 4 луча в L-диапазоне, 16 лучей - в С-диапазоне, 16 лучей - в Ku-диапазоне. В качестве антенной системы с парциальными лучами используется фазированная антенная решетка, каждый элемент которой излучает сигнал одновременно на частотах всех парциальных лучей, положение которых сохраняется благодаря обработке соответствующего пилот-сигнала. При этом для каждого луча будет свое амплитудно-фазовое распределение поля по элементам решетки.
Наземная приемная позиция 1 может быть реализована с помощью комбинации наземного варианта бортового ретрансляционного комплекса «НордМедиаСтар» (более дешевого) и наземной просветной РЛС типа «Струна» или «Барьер-Е» [9-11].
Центральная станция может быть реализована на вычислительных средствах с использованием известных в радиолокации алгоритмов.
Сопоставительный анализ с прототипом показывает, что предлагаемый способ отличается наличием новых операций, в частности:
- дополнительная фильтрация составляющих спектра доплеровских частот обнаруженного низкочастотного сигнала для качественного детектирования интерференционного сигнала биений;
- приемные позиции разносят в пространстве и соединяют между собой и с центральной станцией наземной сетью передачи данных;
- обработка сигналов на передающих и приемных позициях синхронизируется от меток единого времени,
- на каждой приемной позиции в соответствующих лучах осуществляют прием прямого и отраженного от ПО радиосигналов параллельным набором приемных парциальных каналов, соответствующих количеству излучаемых на нее радиосигналов передающими позициями и настроенных на соответствующие частоты пилот-сигналов;
- число лучей приемных позиций выбирают по числу лучей у передающих позиций, находящихся в их зоне видимости и обеспечивающих «просветный» эффект;
- в каждой приемной позиции для любого ПО осуществляют сравнение амплитуд сигналов в приемных парциальных каналах на одной и той же приведенной к какому-либо каналу этой (или соседней) приемной позиции доплеровской частоте, затем на основании полученных с одной или нескольких приемных позиций измеренных координат ПО, привязанных к единым времени и системе координат, с учетом метода экстраполяции, на центральной станции строят траекторию движения ПО, в том числе и экстраполяционную, с привязкой к электронной карте местности;
- передача данных о координатах, обнаруженных ПО, на центральную станцию и после дополнительной обработки - к соответствующим потребителям;
- объединение полученных на центральной станции данных, привязка их к единой системе координат и электронной карте местности;
Таким образом, заявляемый подвижный комплекс средств связи соответствует критерию изобретения "новизна".
Сравнение заявляемого способа с другими аналогами показывает, что вновь введенные операции известны специалистам в области техники связи и радиолокации, что показывают приведенные ссылки на научно-техническую литературу.
Данный способ существенно отличается от известных аналогов в области техники связи и радиолокации, явным образом не следует из уровня техники, является нетрадиционным, поэтому имеет “изобретательский уровень”. Это позволяет сделать вывод о соответствии технического решения критерию “существенные отличия”. Заявляемый способ может быть реализован с использованием существующих серийных устройств, применяемых в технике связи и радиолокации, вычислительной технике, и является промышленно применимым.
Литература
1. Крухмалев, В.В. Цифровые системы передачи / В.В. Крухмалев [и др.] - М.: Горячая линия - Телеком, 2007. - 350 с.
2 Теоретические основы радиолокации. Под ред. Я.Д. Ширмана.- М.: «Сов. Радио», 1970.
3. Бляхман А.Б., Самарин А.В. Бистатическая РЛС. Заявка №200401555 с приоритетом от 23.12.2004 г. Евразийский патент №007143.
4. Пат. РФ №2402034, М. кл. G01S 3/72, 2010 (прототип).
* Васин В.А. и др. Радиосистемы передачи информации. - М.: Горячая линия - телеком, 2006. - 427 с.
5. Камнев Е.Ф. и другие. Системы спутниковой связи с эллиптическими орбитами, разнесением ветвей и адаптивной обработкой. - М.: Глобсатком, 2009. - 724 с.
6. Справочник по спутниковой связи и вещанию / Под ред. Л.Я. Кантора. - М.: Радио и связь, 1985. - 288 с.
7. Многочастотная радиолокация. Вишин Г.М. - М.: Военное изд. МО СССР, 1973.
8. Черняк В.С. Многопозиционная радиолокация. - М.: Радио и связь, 1993.
9. Бляхман А.Б., Ковалев Ф.П., Рындык А.Г. Метод определения координат движущихся целей в бистатической РЛС // Радиотехника и радиоэлектроника, 2004, том 49, М 6, С. 707-712.
10. Бляхман А.Б., Мякиньков А.В., Рындык А.Г. Измерение координат целей в трехкоординатных бистатических РЛС с обнаружением "на просвет" // Радиотехника и электроника. 2006. Т. 51, №4. С. 422-427.
11. Бляхман А.Б. и др. Определение координат целей в просветных радиолокационных системах с подвижными позициями // Радиотехника и электроника. 2008. Т. 53, №3. С. 327-332.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402034C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ В НАЗЕМНО-КОСМИЧЕСКОЙ ПРОСВЕТНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2015 |
|
RU2608338C1 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы | 2023 |
|
RU2825760C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516704C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2018 |
|
RU2702622C1 |
| СОВМЕЩЕННАЯ СИСТЕМА РАДИОЛОКАЦИИ И СВЯЗИ НА РАДИОФОТОННЫХ ЭЛЕМЕНТАХ | 2018 |
|
RU2697389C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2018 |
|
RU2688199C1 |
| НАЗЕМНО-КОСМИЧЕСКИЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2006 |
|
RU2324951C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2572521C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ И СЛЕЖЕНИЯ ЗА УДАЛЕННЫМИ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2290763C1 |
Изобретение относится к системам радиосвязи и радиолокации и может использоваться для определения углового положения подвижного объекта (ПО) с помощью системы спутниковой связи. Технический результат состоит в повышении точности определения траектории двиижения подвижного объекта. Для этого приемные позиции разносят в пространстве и соединяют между собой и с центральной станцией наземной сетью передачи данных, процедуры обработки сигналов на передающих и приемных позициях синхронизируют от меток единого времени, выделяют из принятых сигналов путем фильтрации доплеровских частот и далее детектирования интерференционного сигнала биений, в каждой приемной позиции в соответствующих лучах осуществляют прием прямого и отраженного от ПО радиосигналов параллельным набором приемных парциальных каналов, соответствующих количеству излучаемых сигналов передающей позицией и настроенных на одну из несущих частот зондирующего сигнала, число лучей приемных позиций выбирают по числу передающих позиций, находящихся в их зоне видимости, в каждой приемной позиции для любого ПО осуществляют сравнения амплитуд сигналов в приемных парциальных каналах на одной и той же приведенной к какому-либо каналу этой (или соседней) приемной позиции доплеровской частоте, затем на основании полученных измеренных координат ПО с одной или нескольких приемных позиций на центральной станции с учетом метода экстраполяции строят траекторию движения ПО, сведения о которой передают получателю информации.2 н.п. ф-лы, 2 ил.
1. Способ для определения положения подвижного объекта с помощью радиосигналов спутниковой связи, основанный на излучении передающей позицией многочастотного многолучевого радиосигнала, в состав которого вводят пилот-сигналы по числу лучей, а его частоты отличаются на величину, большую максимального значения доплеровской частоты, приеме удаленной приемной позицией прямого и отраженного от ПО радиосигналов параллельным набором приемных парциальных каналов, соответствующих количеству излучаемых сигналов и настроенных на одну из несущих частот радиосигнала, выделении из принятых сигналов путем детектирования интерференционного сигнала биений, режекции прямого сигнала передатчика и пассивных помех, измерении частоты интерференционного сигнала и определении направления прихода сигнала с передающей позиции на ПО моноимпульсным методом путем сравнения амплитуд сигналов в приемных парциальных каналах на одной и той же приведенной к какому-либо каналу доплеровской частоте, равной измеренной в i-ом канале доплеровской частоте, умноженной на отношение несущих частот сигнала канала, относительно которого происходит приведение, и i-го приемного канала, отличающийся тем, что на приемных позициях обеспечивают разнесенный прием и обмен данными между собой и с центральной станцией, процедуры обработки сигналов на передающих и приемных позициях синхронизируют от меток единого времени, выделяют из принятых сигналов путем фильтрации доплеровских частот и далее детектирования интерференционного сигнала биений, в каждой приемной позиции в соответствующих лучах осуществляют прием прямого и отраженного от ПО радиосигналов параллельным набором приемных парциальных каналов, соответствующих количеству излучаемых на нее радиосигналов передающими позициями и настроенными на соответствующие частоты пилот-сигналов, число лучей приемных позиций выбирают по числу лучей, направленных на них с передающих позиций, находящихся в их зоне видимости и обеспечивающих «просветный» эффект, в каждой приемной позиции для любого ПО осуществляют сравнение амплитуд сигналов в приемных парциальных каналах на одной и той же приведенной к какому-либо каналу этой или соседней приемной позиции доплеровской частоте, затем на основании полученных с одной или нескольких приемных позиций измеренных координат ПО, привязанных к единым времени и системе координат, с учетом метода экстраполяции, на центральной станции строят траекторию движения ПО, в том числе и экстраполяционную, с привязкой к электронной карте местности, сведения о траектории передают получателю информации.
2. Система для определения положения подвижного объекта с помощью радиосигналов спутниковой связи, содержащая передающую позицию в составе последовательно включенных штатного устройства обработки информации передающей позиции, передатчика и передающей антенны и приемную позицию, в состав которой входят приемная антенна, соединенные с ней параллельно штатное устройство обработки информации приемной позиции полосовых фильтров и N высокочастотных узкополосных фильтров, полосы частот которых соответствуют полосе частот спектра излучаемых радиосигналов, к которым в свою очередь подключены последовательно N приемников, N устройств режекции прямого сигнала передатчика и пассивных помех, а также N блоков определения доплеровской частоты, выходы которых подключены к блоку определения пеленга, передатчик является многочастотным, передающая антенна формирует N парциальных лучей, частоты которых отличаются на величину, большую максимальной величины доплеровской частоты, отличающаяся тем, что B передающих позиций и M приемных позиций разнесены в пространстве, M приемных позиций соединены между собой и с центральной станцией наземной сетью передачи данных, имеющей соответствующий вход/выход, выходы N устройств режекции прямого сигнала передатчика и пассивных помех каждой приемной позиции подключены через N фильтров нижних частот к входам N блоков определения доплеровской частоты, бортовой приемник сигналов глобальных навигационных спутниковых систем с антенной на передающей позиции через соответствующий генератор тактовых импульсов подключен к штатному устройству обработки информации передающей позиции, а на приемных позициях наземный приемник сигналов глобальных навигационных спутниковых систем с антенной через соответствующий генератор тактовых импульсов подключен к синхровходам соответствующих N приемников, N устройств режекции прямого сигнала передатчика и пассивных помех, N фильтров нижних частот, N блоков определения доплеровской частоты, блока определения пеленга, приемная антенна формирует N «узких» лучей, перекрывающих всю зону «просветного» эффекта одной и зоны обзора двух соседних передающих позиций, N «узких» лучей каждой передающей антенны перекрывают всю зону «просветного» эффекта одной и двух соседних приемных позиций, вход/выход блока определения пеленга подключен к входу/выходу штатного устройства обработки информации приемной позиции, входы/выходы центральной станции и наземной сети передачи данных являются входами/выходами системы.
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402034C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2309543C2 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

