Область техники
Изобретение относится к области радиоэлектронной разведки (РЭР) излучающих радиоэлектронных средств радиосвязи, радиотелеуправления, радиолокации и может быть использовано для определения местоположения радиолокационных станций (РЛС) контрбатарейной борьбы (КББ) противника на основе измерения доплеровской частоты сигнала РЛС КББ, отраженного от снаряда (мины), траектория которого известна.
Уровень техники
В настоящее время одним из основных средств обнаружения огневых позиций артиллерии противника являются РЛС КББ, осуществляющие определение координат стреляющих огневых средств противника путем засечки артиллерийских снарядов на начальном участке траектории и проведении нескольких измерений его текущего положения с целью расчета траектории. На основе пролонгации и экстраполяции измерений параметров траектории определяются местоположение огневых средств и места возможного попадания снарядов. [см., например, Крупников А. Радиолокационные станции контрбатарейной борьбы основных зарубежных стран (рус.) // Зарубежное военное обозрение: журнал. - 2010. - Декабрь (№12). - С. 32-41].
Известен [см. патент РФ №2285937, 2004, G01S 13/00; G01S 5/00) способ определения координат источника радиоизлучения (РЛС)], включающий прием радиоизлучения источника не менее чем в трех пространственно-разнесенных пунктах приема с известными собственными координатами с последующей передачей принятых радиосигналов на центральный пункт, где их преобразуют в нормированный пространственный спектр, по максимуму которого определяют координаты источника. Для преобразования радиосигналов в нормированный пространственный спектр рассчитывают взаимное запаздывание моментов прихода электромагнитных волн в пункты приема из мест возможного положения источника, измеряют энергию принятых радиосигналов, определяют произведения энергии различных пар радиосигналов и квадраты модулей комплексных взаимных корреляционных функций в точках расчетного запаздывания, после чего значения квадратов модулей усредняют по совокупности пар радиосигналов, находят отношение усредненных квадратов модулей комплексных взаимных корреляционных функций к соответствующим усредненным попарным произведениям энергии радиосигналов.
В способе используется информация только о задержках (запаздывании) сигналов, он может быть отнесен к классу разностно-дальномерных способов с одноэтапной обработкой.
Данному способу присущи следующие недостатки. Существенное ограничение области применимости способа - неприменимость его для гармонических (узкополосных) излучений из-за неоднозначности определения максимума взаимного запаздывания прихода сигналов. Кроме того, область применения способа ограничена условием неподвижности пунктов приема (неизменности их координат). При движении возникает доплеровский сдвиг частоты, потенциальные точности определения координат не реализуются, более того, неизвестный сдвиг частоты выступает дестабилизирующим фактором, приводящим к возникновению дополнительных погрешностей определения координат.
Известен разностно-дальномерно-доплеровский способ определения местоположения источника радиоизлучения с двухэтапной обработкой [см., например, Кондратьев B.C. и др. Многопозиционные радиотехнические системы / B.C. Кондратьев, А.Ф. Котов, Л.Н. Марков: Под ред. проф. В.В. Цветаева. - М.: Радио и связь, 1986, с. 246-247, 251, 178-179], включающий периодический прием радиоизлучения источника одновременно не менее чем в двух пространственно-разнесенных подвижных пунктах приема, синхронно с этим измерение собственных координат и параметров вектора скорости движения пунктов приема, с последующей передачей их и принятых радиосигналов на центральный пункт, измерение разности задержек моментов прихода электромагнитных волн в пункты приема и доплеровских сдвигов частот различных пар принятых радиосигналов, и определение местоположения источника по совокупности результатов измерений.
Ему присущи следующие недостатки. Не учитывается отношение сигнал/шум в пунктах приема, что приводит к невозможности реализации потенциальных точностей определения координат, в ряде случаев приводя к аномальным погрешностям, например, когда отсутствует прием сигнала в одном или нескольких пунктах. Отношение сигнал/шум в пунктах приема различается, вследствие различий уровней сигналов, связанных с их ослаблением при распространении. Область применения способа, вследствие неопределенности заключительной операции (определения координат источника по совокупности результатов измерений) ограничена условиями наличия не менее двух подвижных точек и определения координат только одномоментно, в фиксированный момент времени. Порядок действий и операций над сигналами, объединения информации при движении на заданных или произвольных интервалах времени, когда прием и последующие операции способа выполняют периодически и многократно, не конкретизирован. Проблематично обеспечение высокоточных совместных измерений задержек и сдвигов частот.
Известны просветные радиолокационные станции (РЛС), в которых используется явление повышения интенсивности рассеянного на цели излучения при ее нахождении между передатчиком и приемником [Например, А.Н. Ковалев, Ф.Н. Ковалев. Алгоритм определения координат цели в просветном радиолокаторе с разнесенным приемом. Труды Нижегородского государственного технического университета им. Р.Е. Алексеева, 2014 г.].
Просветные РЛС способны успешно обнаруживать воздушные объекты, выполненные с применением технологии Stealth, и маловысотные цели.
Просветные радиолокаторы могут быть сформированы из монохроматического передатчика и приемника с амплитудным детектированием суммарного колебания, образуемого в результате интерференции радиоволны, рассеянной на цели, и более мощной прямой радиоволны от передатчика. Координаты цели в радиолокаторах находят по измерениям доплеровской частоты и направления прихода рассеянного сигнала.
Однако методы определения координат цели, которые реализуются в просветных РЛС, сложно использовать для определения координат РЛС КББ, поскольку для просветных РЛС целью является движущийся снаряд, а координаты РЛС подсвета (в нашем случае РЛС КББ) должны быть известными.
Известно устройство для определения параметров движения цели [см., например, патент РФ №2124220. МПК G01S 13/06, 1998 г., авторы: Бляхман А.Б., Ковалев Ф.Н., Рындык А.Г.]. Работа устройства основана на приеме зондирующего сигнала и сигнала вторичного излучения цели, выделения низкочастотного сигнала биений путем детектирования интерференционного сигнала (суммы прямого сигнала передатчика и отраженного от цели сигнала), измерении доплеровской частоты и направления прихода отраженного от цели сигнала по интерференционному сигналу, экстраполяции измеряемых первичных параметров и вычислении момента времени пересечения целью линии базы. Применение ряда операций и преобразований позволяет определять местоположение цели до пересечения ею линии базы. Это достигается за счет экстраполяции измеряемых функциональных зависимостей ƒд(t) - частоты Доплера от времени и α(t) - углового направления на цель от времени, и, тем самым, определения экстраполированного момента времени пересечения целью линии базы из условия равенства нулю экстраполированных функциональных зависимостей. Таким образом, используя несколько измеряемых значений и а, в этом способе производится экстраполяция зависимостей fд(t) и α(t), по которым определяется момент времени пересечения целью линии базы до прихода к ней цели и во время нахождения ее в зоне режекции доплеровских фильтров. Пространственные координаты цели однозначно находятся как координаты точки пересечения поверхности положения (поверхности равных фаз или суммарных дальностей) и линии направления на цель из приемной позиции (линии пеленга).
Описанное устройство характеризуется значительным ростом ошибки измерения дальности до цели в окрестности линии базы системы, что связано с высокой чувствительностью измерений к отклонениям угловой координаты и отклонениям поверхности положения (поверхности равных фаз или суммарных дальностей) в непосредственной близости от линии базы, а также недостаточно высокой точностью определения местоположения цели по сравнению с потенциально достижимой точностью. Кроме того, способ не применим для определения координат РЛС КББ, поскольку позволяет определить координаты движущегося снаряда, а координаты РЛС подсвета должны быть известными.
Наиболее близким по технической сущности к заявляемому способу является спо-соб определения координат быстроходного подводного аппарата с использованием эффекта Доплера [см. патент РФ № RU 2737166 C1, G01S 15/58, 02/03, 2020, авторы: А.В. Лопарев, И.В. Пашкевич, А.Б. Торопов, Е.В. Лукоянов, Ю.М. Скородумов, Д.П. Елисеев, А.Е. Пелевин, О.В. Зайцев], в котором решается задача определения местоположения быстроходных автономных необитаемых подводных аппаратов (АНПА) по информации о доплеровском сдвиге частоты гидроакустического сигнала от одного выпускного буя.
Расположенный на выпускном буе приемник спутниковых сигналов и модем гидроакустической связи позволяют получать географические координаты выпускного буя и передавать их на АНПА. Установленная на АНПА аппаратура приема гидроакустических сигналов от выпускного буя позволяет получить не только его географические координаты, но и измерить доплеровский сдвиг частоты сигнала, позволяющий рассчитать радиальную (доплеровскую) скорость. Имея как минимум два измерения доплеровского сдвига частоты, можно рассчитать наклонные дальности до выпускного буя по информации о доплеровской скорости и скорости движения АНПА и с учетом данных о курсе и глубине погружения АНПА определить пеленг на выпускной буй, что позволит получить в итоге географические координаты АНПА.
В способе-прототипе известны координаты источника излучения и его параметры, что позволяет по изменению доплеровской частоты, принимаемой АНПА, и скорости движения, определить координаты АНПА. Применительно к задаче, решаемой в заявляемом изобретении, координаты источника излучения - РЛС КББ не известны, поэтому воспользоваться для определения их координат способом, предложенным в прототипе не представляется возможным.
Описание изобретения (сущность изобретения)
Основной задачей изобретения является разработка способа определения координат РЛС контрбатарейной борьбы противника на основе анализа изменения доплеровской частоты сигнала РЛС, отраженного от снаряда, при минимальном количестве автономных постов приема сигнала.
Техническим результатом при осуществлении способа является минимальное количество аппаратуры, необходимой для определения координат РЛС КББ, сокращение количества периферийных постов приема (ППП) с радиоприемным оборудованием, повышение мобильности и защищенности от воздействия противника.
Технический результат достигается за счет использования всего одной наземной станции радиотехнической разведки (РТР) с двухканальным радиоприемным оборудованием и одного воздушного ретранслятора, при этом исключается использование специальной аппаратуры для передачи сигнала от периферийной к центральной станции.
Для определения местоположения РЛС КББ предлагается наземную станцию РТР разместить на некотором расстоянии от орудия таким образом, чтобы обеспечивался прием сигнала РЛС КББ, отраженного от снаряда, и одновременно прием сигнала РЛС КББ, излученного воздушным ретранслятором, располагающимся на некоторой высоте в районе позиции орудия.
Путем сравнение несущей частоты сигнала РЛС КББ, отраженного от снаряда и принятого станцией РТР fpтр, с несущей частотой сигнала, излучаемого РЛС КББ и излученного ретранслятором fpлc в направлении станции РТР, определяется суммарная доплеровская частоты сигнала Fдртр. Затем по известной скорости снаряда и местоположению станции РТР определяется вторая доплеровская составляющая, возникающая за счет движения снаряда относительно станции РТР Fд2. Первая доплеровская составляющая частоты, которая образуется за счет движения снаряда относительно РЛС КББ Fд1, вычисляется как разность суммарной и второй составляющей доплеровской частоты. По известному вектору скорости снаряда и вычисленной таким образом первой составляющей доплеровской частоты вычисляется угол α1, определяющий направления на возможные позиции РЛС КББ, при которых может получена доплеровская составляющая Fд1.
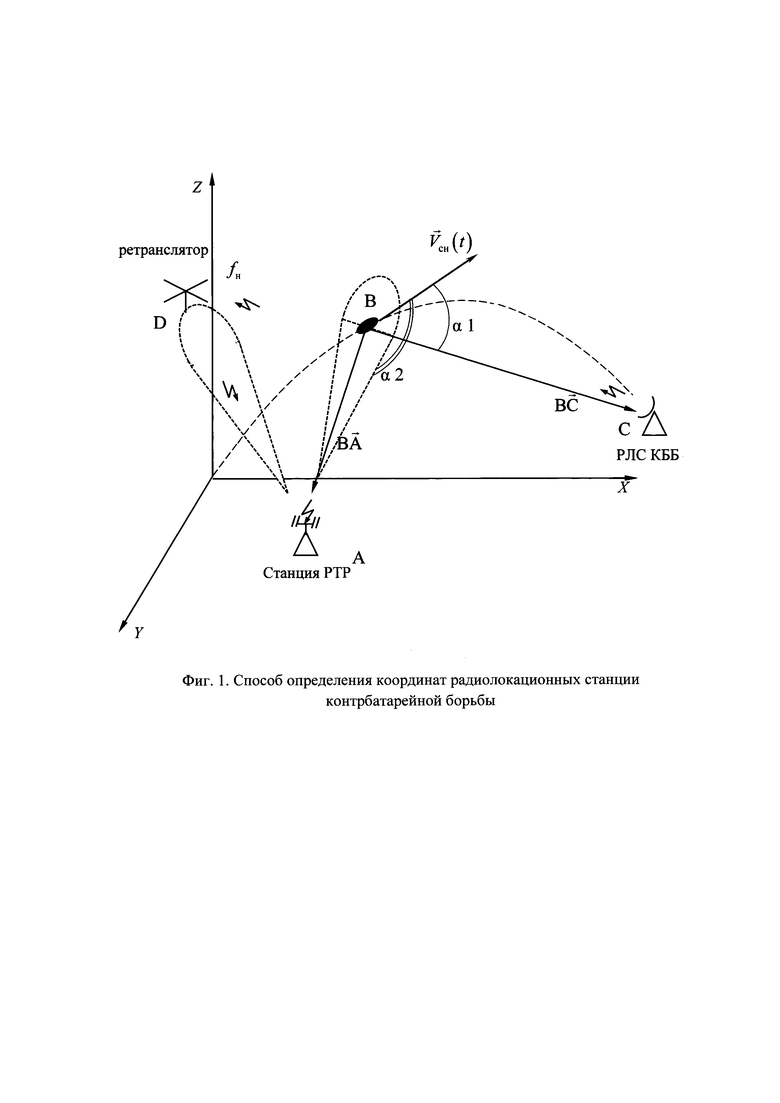
Определение координат РЛС КББ заявленным способом поясняется чертежом фиг. 1, где введены следующие обозначения:
X, Y, Z - оси координат трехмерного пространства, в начале координат в точке О располагается огневая позиция артиллерийского орудия;
А - позиция станции РТР;
В - положение снаряда на траектории;
С - позиция РЛС КББ;
D - положение воздушного ретранслятора.
Доплеровская частота, которая может наблюдаться наземной станцией РТР, будет являться суммой двух составляющих:

где Fд1(t) - доплеровская частота, определяемая радиальной скоростью движения снаряда относительно РЛС КББ;

Vсн(t) - вектор скорости снаряда в момент времени t;
λ - длина волны сигнала, излучаемого РЛС КББ;
α1(t) - угол между вектором скорости Vсн(t) и вектором ВС (направление от снаряда на РЛС КББ).
Вторая составляющая доплеровской частоты определяется радиальной скоростью снаряда относительно станции РТР

α2(t) - угол между вектором скорости VCH(t) и вектором ВА (направление от снаряда на станцию РТР).
Частота сигнала, принимаемого станцией РТР (fpтр), будет отличаться от несущей частоты сигнала РЛС на суммарную доплеровскую частоту Рдртр, а именно:

где fpлc(t) - несущая частота сигнала РЛС КББ.
Воздушный ретранслятор, размещенный над огневой позицией артиллерийского орудия, обеспечивает прием сигнала РЛС КББ и его излучение в направлении наземной станции РТР. Станция РТР принимает одновременно сигнал несущей частоты РЛС fpлc(t) и сигнал, отраженный от снаряда fpтр(t), и если ретранслятор неподвижен, то суммарная доплеровская частота Fдртр(t) может быть определена по формуле (4):

Из соотношения (1) получаем

Приравнивая правые части формул (2) и (6), получаем
Fдртр(t)-Fд2(t)=(|Vсн(t)|/λ)×cosα1(t),
Тогда

Из рассмотрения фиг. 1 следует, что под углом он может располагаться множество лучей, исходящих из точки В, которые образуют коническую поверхность относительно вектора скорости снаряда, причем вершина конуса совпадает с положением снаряда. Пересечение поверхности этого конуса с поверхностью земли образует кривую линию, определяющую местоположение возможных точек размещения РЛС КББ на местности.
При движении снаряда по траектории из-за изменения его скорости и местоположения относительно позиций станции РТР и РЛС КББ происходит изменение доплеровской частоты сигнала, принимаемого станцией РТР, и, соответственно, изменение угла α1(t). Для нового значения α1(t1) образуется новый конус, поверхность которого пересекается с поверхностью земли, и, соответственно, новая кривая линия, определяющая местоположение возможных точек размещения РЛС КББ на местности. Пересечение этих кривых происходит в двух точках, расположенных симметрично относительно плоскости стрельбы. Для получения однозначных координат РЛС КББ предлагается изменить направление стрельбы, что позволит исключить одну из симметрично расположенных точек.
Следовательно, предложенный способ позволяет определить местоположение РЛС КББ с помощью одной наземной станции РТР и одного воздушного ретранслятора при условии, что имеются данные о траектории движения снаряда, от которого отражается сигнал РЛС КББ.
Обоснование возможности реализации способа определения координат РЛС КББ по сигналу, отраженному от снаряда
Для обоснования возможности реализации предлагаемого способа определения координат РЛС КББ проведем расчеты мощности сигнала, который может поступать на вход приемника станции РТР по первому приемному каналу (сигнал, отраженный от снаряда) и по второму приемному каналу станции (сигнал, излученный воздушным ретранслятором).
1. Оценка возможности приема станцией РТР сигнала РЛС КББ, отраженного от снаряда
Рассчитаем мощность сигнала РЛС КББ, отраженного от снаряда и поступающего на вход приемника РТР, по следующей формуле:

где Ррлс - импульсная мощность РЛС КББ, Вт;
Gрлс - коэффициент усиления антенны РЛС КББ;
Gpтр - коэффициент усиления антенны станции РТР;
λ - длина волны, м;
R1 - расстояние РЛС - снаряд, м;
R2 - расстояние снаряд - станция РТР, м;
σ1-2 - двух позиционная ЭПР снаряда, м кв.
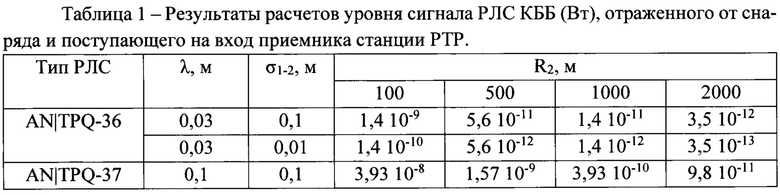
Расчеты проведем для следующих исходных данных:
- энергетический потенциал РЛС КББ типа AN|TPQ-36 составляет 85 дБВт (λ=0,03 м); AN|TPQ-37 - 89 дБВт (λ=0,1 м); AN|TPQ-48 - 70 дБВт (λ=0,15 м);
- КНД антенны станции РТР Gpтp=20 дБ;
- двух позиционная ЭПР σ1-2=0,1 м кв. и 0,01 м кв.;
- длина волны, λ=0,03 м; 0,1 м и 0,15 кв. м;
- R1=10000 м.
Результаты расчетов приведены в таблице 1.
Из данных, приведенных в таблице 1, следует, что для двухпозиционной ЭПР равной 0,1 м2, обнаружение сигнала РЛС КББ, отраженного от снаряда на начальном участке траектории, может обеспечиваться при чувствительности приемника РТР равной 10-8…10-12 Вт, что реализуемо для приемника с полосой пропускания 10 МГц. Для ЭПР равной 0,01 требования к чувствительности возрастают на 10 дБ.

Оценим минимальный обнаруживаемый сигнал, который ограничен шумом приемника и может быть выражен как Smin=kT0BFn(S/N), где kТ0=4 10-21 Вт/Гц;
В - ширина частотной полосы приемника, Гц;
Fn - коэффициент шума приемника;
(S/N) - отношение сигнал/шум необходимое для обнаружения сигнала, если принимается только один импульс.
Оценки Smin проведены для следующих исходных данных; В=10 МГц; Fn=7 дБ; (S/N)=10.
В результате оценок получено, что при использовании современной элементной базы может быть реализована чувствительность приемника ≈2,8 10-12 Вт. Учитывая коэффициент усиления приемной антенны примерно 20 дБ (ширина ДНА 16×16 град), можно рассчитывать на эквивалентную чувствительность 2,8 10-14.
Таким образом, имеющиеся в настоящее время приемные устройства должны обеспечить прием сигнала, отраженного от снаряда.
2. Оценка возможности приема станцией РТР сигнала РЛС КББ, излученного воздушным ретранслятором
Предполагается, что воздушный ретранслятор будет осуществлять прием сигнала РЛС КББ по боковым лепесткам диаграммы направленности РЛС. Излучение принятого сигнала в направлении наземной станции РТР осуществляется на несущей частоте РЛС КББ. Для реализации этого необходимо обеспечить развязку между трактами приема и передачи воздушного ретранслятора за счет использования ортогональной поляризации антенн. По оценкам специалистов развязка может составить до 25…30 дБ. Полагаем, что приемная и передающая антенна ретранслятора имеют широкую ДНА, следовательно, коэффициенты усиления их антенн не превысит 0…3 дБ.
Проведем расчеты мощности сигнала на входе приемника станции РТР, поступающего от воздушного ретранслятора, располагающегося на дальности 100…1500 м от станции, по следующей формуле:

где Ррлс - импульсная мощность РЛС КББ, Вт;
Gрлс - коэффициент усиления антенны РЛС КББ по главному лучу;
Gбрлс - коэффициент усиления антенны РЛС КББ по боковым лепесткам;
Gpтр - коэффициент усиления антенны станции РТР;
Кретр - коэффициент передачи сигнала ретранслятором;
λ - длина волны, м;
R1 - расстояние РЛС - ретранслятор, м;
R2 - расстояние ретранслятор - станция РТР, м.
Расчеты проведем для следующих исходных данных:
- энергетический потенциал РЛС КББ типа AN|TPQ-36 составляет 85 дБВт, AN|TPQ-37 - 89 дБВт, a AN|TPQ-48 - 70 дБВт.
- КНД антенны станции РТР Gpтр=20 дБ;
- Кретр - коэффициент передачи воздушного ретранслятора 25…30 дБ.;
- Gбрлс=-25дБ; - 40 дБ;
- Gpтр=0 дБ;
- длина волны, λ,=0,01 м; 0,1 м и 0,15 м;
- R1=10000 m; R2=100…1500 м.
Результаты расчетов приведены в таблице 2.
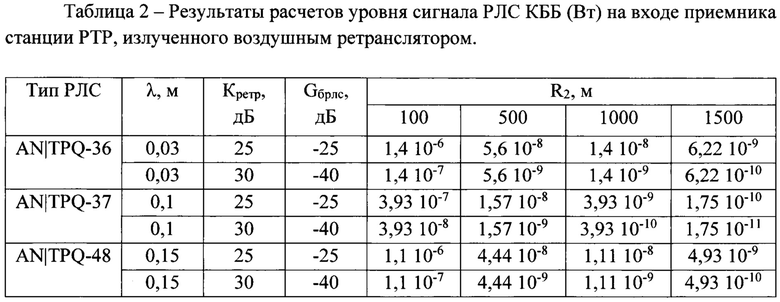
Из данных, приведенных в таблице 2, следует, что для Кретр=25 дБ и Gбрлс=- 25 дБ прием ретранслированного сигнала станцией РТР обеспечивается при чувствительности приемника не хуже 4,93 10-9 Вт, а для Кретр=30 дБ и Gбрлс=- 40 дБ при чувствительности приемника не хуже 4,93 10-10 Вт, что, как было показано выше, не представляет трудностей при реализации.
Для подтверждения возможности реализации предлагаемого способа рассмотрим вариант, при котором станция РТР размещается на удалении от огневой позиции (ОП) артиллерийского орудия и обеспечивается разведка сигналов РЛС КББ, отраженных от снаряда первым приемным каналом. Для этого первая антенна станции РТР направлена таким образом, чтобы ее диаграмма перекрывала начальный участок траектории. Вторым приемным каналом станция РТР ведет прием сигналов РЛС КББ, излученных воздушным ретранслятором с соответствующей ориентацией приемной антенны.
Перед началом стрельбы на стацию РТР передаются данные о прицеле, направлении стрельбы и начальной скорости снаряда (заряде) и другие данные, необходимые для расчета траектории движения снаряда. После этого осуществляется выстрел, причем информация о точном времени выстрела передается на станцию РТР с погрешностью не более 1 мс. С момента выстрела на станции РТР осуществляются вычисления траектории движения снаряда, положение его вектора скорости, измерение доплеровской частоты Fдртр(t), а также вычисление углов, определяющих направление от снаряда на станцию РТР (α2) и на РЛС КББ (α1). Затем по результатам вычисления угла α1 осуществляется построение конуса с вершиной в точке расположения снаряда и образующими, которые направлены под углом α1 к вектору скорости снаряда. Пересечение такой конической поверхности с поверхностью земли образует линию возможных положений позиции РЛС КББ.
Повторение результатов расчетов для нескольких положений снаряда на траектории и двух (нескольких) направлений стрельбы орудия позволяет вычислить местоположение позиции РЛС КББ.
Таким образом, предложенный способ может быть реализован на основе современных изделий электронной техники и позволяет при использовании одной наземной станции РТР и одного воздушного ретранслятора определить пассивными методами местоположение РЛС КББ при обеспечении высокой скрытности от средств радиотехнической разведки противника.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат радиолокационных станций контрбатарейной борьбы и устройство для его реализации | 2023 |
|
RU2826616C1 |
| Способ создания ретранслированных помех | 2018 |
|
RU2696002C1 |
| СПОСОБ СТРЕЛЬБЫ РЕАКТИВНЫМИ СНАРЯДАМИ РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ В УСЛОВИЯХ КОНТРБАТАРЕЙНОЙ БОРЬБЫ | 2014 |
|
RU2602162C2 |
| Способ борьбы с артиллерией противника | 2018 |
|
RU2694421C1 |
| УСТРОЙСТВО ИСКАЖЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА | 2007 |
|
RU2347238C1 |
| Способ обзорной трехкоординатной двухпозиционной латерационной радиолокации авиационно-космических объектов | 2019 |
|
RU2717970C1 |
| ПАССИВНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИЗЛУЧАЮЩЕГО ОБЪЕКТА | 1998 |
|
RU2134891C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ | 2014 |
|
RU2557808C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИЗМЕРЕНИЯМ ИХ НЕСУЩЕЙ ЧАСТОТЫ | 2021 |
|
RU2776078C1 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ РАДИОСИГНАЛОВ СИСТЕМЫ СПУТНИКОВОЙ СВЯЗИ ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2562961C1 |
Изобретение относится к области радиоэлектронной разведки излучающих радиоэлектронных средств радиосвязи, радиотелеуправления, радиолокации и может быть использовано для определения местоположения радиолокационных станций (РЛС) контрбатарейной борьбы (КББ) на основе измерения доплеровской частоты сигнала РЛС КББ, отраженного от снаряда, траектория которого известна. Технический результат заключается в сокращении количества постов приема с радиоприемным оборудованием и повышении скрытности системы в целом. В заявленном способе определение несущей частоты сигнала РЛС КББ и доплеровской частоты сигнала, отраженного от снаряда, осуществляют наземной станцией радиотехнической разведки (РТР), реализующей совместную обработку двухканальным радиоприемным оборудованием сигналов РЛС КББ, отраженных от снаряда, и сигналов РЛС КББ, ретранслированных воздушным ретранслятором. Местоположение РЛС КББ определяют путем расчета доплеровской составляющей, образующейся за счет движения снаряда с известной скоростью относительно РЛС КББ, как разности суммарной доплеровской частоты сигнала РЛС, принятого станцией РТР, и расчетной составляющей доплеровской частоты, образующейся за счет движения снаряда относительно станции РТР, координаты которой известны, а затем расчета косинуса угла между вектором скорости снаряда и направлением на позицию РЛС КББ. При этом угол определяет конус, вершина которого совпадает с положением снаряда, а образующие направлены на возможные позиции РЛС КББ. Линия пересечения поверхности конуса с поверхностью земли определяет возможные местоположения РЛС КББ. При повторении расчетов для нескольких положений снаряда на траектории и двух и более направлений стрельбы однозначно определяется местоположение РЛС КББ. 1 ил., 2 табл.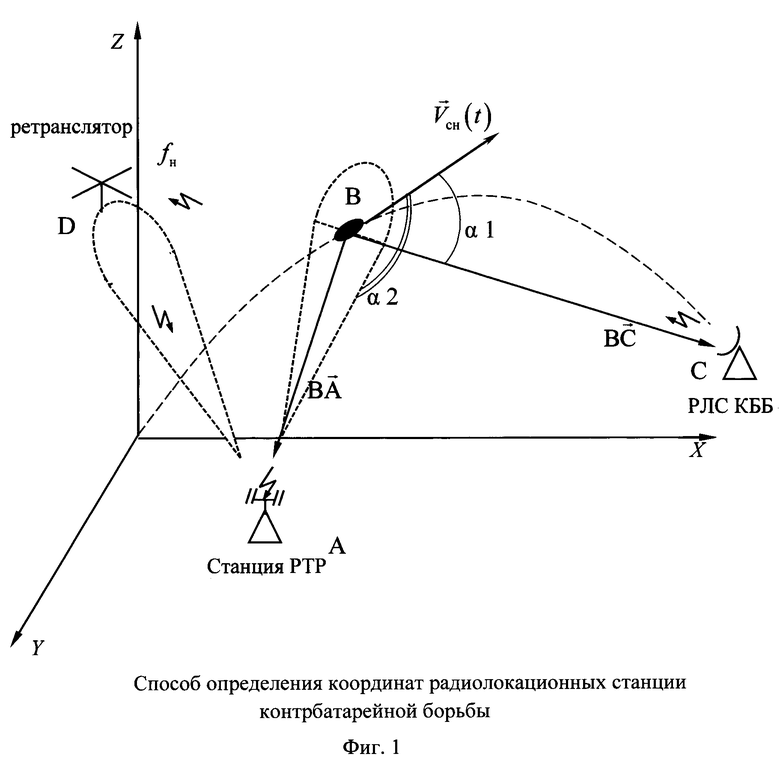
Способ определения координат радиолокационной станции (РЛС) контрбатарейной борьбы (КББ) с использованием эффекта Доплера, основанный на приеме сигнала разнесенными периферийными пунктами приема (ППП), имеющими общий пункт управления, отличающийся тем, что с целью сокращения количества ППП в качестве одного ППП используется артиллерийский снаряд (мина), движущийся по траектории с известными параметрами, от которого отражается сигнал РЛС КББ, а в качестве другого ППП – воздушный ретранслятор, принимающий сигнал РЛС КББ и излучающий его в направлении наземной станции радиотехнической разведки (РТР), которая является пунктом управления и имеет две приемных антенны и два приемных канала, и осуществляет с помощью первой антенны и первого приемного канала разведку сигнала РЛС КББ, отраженного от снаряда, а с помощью второй антенны и второго канала прием сигнала РЛС КББ, излученного воздушным ретранслятором, путем сравнения этих сигналов определяется суммарная доплеровская частота сигнала РЛС КББ, который принимается станцией РТР, при этом вторая доплеровская составляющая сигнала, возникающая за счет движения снаряда относительно станции РТР, вычисляется по известному вектору скорости снаряда и направлению на станцию РТР, а первая доплеровская составляющая, возникающая за счет движения снаряда относительно РЛС КББ, вычисляется как разность суммарной доплеровской частоты и второй доплеровской составляющей, по вычисленной таким образом первой доплеровской составляющей и вектору скорости снаряда рассчитывается угол между вектором скорости и направлением на РЛС КББ, который определяет конус с вершиной, совпадающей с положением снаряда, центральной осью, совпадающей с вектором скорости, а образующие конуса определяют направления на возможные позиции РЛС КББ, при этом пересечение поверхности конуса с поверхностью земли образует линию, определяющую геометрическое место точек местоположения РЛС КББ, причем для однозначного определения местоположения РЛС КББ повторяются вычисления для нескольких положений снаряда на траектории и двух или более направлений стрельбы.
| Способ определения координат быстроходного подводного аппарата с использованием эффекта Доплера | 2020 |
|
RU2737166C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2006 |
|
RU2309420C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАДИОЛОКАЦИОННОЙ СТАНЦИИ СО СКАНИРУЮЩЕЙ ДИАГРАММОЙ НАПРАВЛЕННОСТИ | 2023 |
|
RU2807301C1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2020 |
|
RU2758832C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 1997 |
|
RU2124220C1 |
| US 5614912 A, 25.03.1997 | |||
| KR 20180061690 A, 08.06.2018. | |||

