Область техники
Настоящее изобретение относится к обнаружению повреждения в исполнительном органе управления полетом.
В частности, но не ограничительно оно относится к обнаружению повреждения основного тракта исполнительного органа управления полетом воздушного судна и к принятию на себя нагрузки вторичным трактом исполнительного органа управления.
Уровень техники
Традиционно такие исполнительные органы управления содержат два механических тракта, - один основной и один вторичный, причем последний предназначен для принятия на себя нагрузки, когда основной тракт отказывает, в общем случае из-за повреждения основного тракта.
Общая конструкция исполнительного органа управления схематично показана на фиг.1.
При функционировании основного тракта 1 усилия передаются с помощью полого винта 2, например шарикового или роликового винта.
Эта характеристика позволяет размещать принимающую на себя усилия аварийную тягу 3, которая имеет рифление на концах и соединена с винтом 2 с зазором.
Эта конструкция обеспечивает непрерывность передачи усилий и вращение устройства без осевого отделения элементов винта в случае повреждения его самого.
Винт 3 заканчивается на одном конце соединительной деталью, называемой верхним основным креплением 4, посредством которого он соединен с конструкцией 5 воздушного судна.
В случае отказа основного тракта 1, то есть в случае повреждения элемента основного тракта 1, усилия принимает на себя вторичный тракт 10, а именно аварийная тяга 3, конец которой образован охватываемым устройством (например, сферой), расположенным в охватывающем устройстве детали крепления 8 вторичного тракта, называемого верхним вторичным креплением.
Само верхнее вторичное крепление 8 соединено с воздушным судном с помощью детали 9 крепления, отличной от той, которая используется для опоры основного тракта 1.
Из уровня техники известно множество систем обнаружения повреждения основного тракта и восприятия усилия вторичным трактом в исполнительном органе управления полетом.
В патентном документе FR 2858035 описана система обнаружения, предназначенная для обнаружения поступательного перемещения свободного конца аварийной тяги относительно верхнего вторичного крепления.
В патентном документе ЕР 1557588 описано устройство для обнаружения передачи нагрузки от основного тракта вторичному тракту на основе обнаружения сдвига между деталями верхнего вторичного крепления.
В патентном документе ЕР 1972549 описано решение, содержащее датчик, способный определять усилие на деталях, обеспечивающих верхнее крепление вторичного тракта, таких как крепежные винты вторичного тракта или шпильки крепления вторичного тракта, при этом датчик способен определять эти усилия под их напряжением.
Однако известные к настоящему времени решения имеют недостатки в том, что требуют специфического и сложного выполнения на уровне верхнего вторичного крепления.
Кроме того, они требуют прокладки громоздких и тяжелых кабелей системы обнаружения на уровне верхнего вторичного крепления. Эти решения вызывают увеличение массы воздушного судна.
В некоторых решениях вследствие размещения датчиков в местах сопряжения деталей исполнительного органа управления требуется также увеличение зазора между деталями, что неблагоприятно для вибрационной устойчивости узла. Зазор между деталями исполнительного органа управления известен специалисту в данной области под английским термином «флаттер» и накладывает специфические требования в воздушном судне.
И наконец, известные решения требуют сложной электронной обработки измеряемых сигналов и требуют усовершенствования в аспекте надежности.
Раскрытие изобретения
Задача, на решение которой направлено настоящее изобретение, заключается в устранении недостатков известных решений уровня техники.
В соответствии с изобретением предложено устройство обнаружения повреждения основного тракта в исполнительном органе управления полетом, причем исполнительный орган содержит основной тракт, имеющий полый вращающийся винт, вторичный тракт, имеющий воспринимающую усилие аварийную тягу, проходящую через винт, при этом устройство отличается тем, что содержит датчик положения, соединенный с винтом для измерения информации, представляющей его угловое положение, и систему отсоединения, выполненную с возможностью отсоединять датчик положения от винта в случае перемещения тяги относительно винта при повреждении основного тракта.
Решение по изобретению выгодным образом дополняется следующими особенностями, взятыми по отдельности или в комбинации:
- устройство содержит вычислительный блок, выполненный с возможностью сравнения информации, измеряемой датчиком положения, и информации, представляющей угловое положение винта, измеряемой вторым датчиком положения, независимым от системы отсоединения;
- вычислительный блок выполнен с возможностью обнаружения повреждения основного тракта, когда результат сравнения выше или ниже предварительно определенной пороговой величины;
- система отсоединения выполнена с возможностью отсоединять датчик положения от винта, когда тяга оказывает предварительно определенную нагрузку на винт, соответствующую механическому усилию, оказываемому тягой на винт при повреждении винта или другого элемента основного тракта;
- система отсоединения содержит срезной палец;
- срезной палец имеет калиброванное сечение для разрушения при предварительно определенной нагрузке, которая соответствует механическому усилию, оказываемому тягой на винт при повреждении основного тракта;
- срезной палец подвержен предварительно определенной нагрузке удаления, которая позволяет удалять палец из винта в случае разрушения пальца;
- датчик положения является датчиком углового положения.
В соответствии с изобретением предложен также исполнительный орган управления полетом, содержащий основной тракт, имеющий полый вращающийся винт, вторичный тракт, имеющий воспринимающую усилие аварийную тягу, проходящую через винт, причем вторичный тракт выполнен с возможностью принятия на себя усилия, оказываемого основным трактом, в случае повреждения основного тракта, при этом исполнительный орган отличается тем, что содержит описанное выше устройство для обнаружения повреждения основного тракта.
Изобретение имеет ряд преимуществ.
Одним преимуществом является простота и низкая стоимость решения.
Другое преимущество состоит в небольшом весе устройства, которое незначительно увеличивает массу воздушного судна.
Следующее преимущество состоит в повышенной надежности решения.
Следующее преимущество состоит в том, что решение позволяет уменьшить зазор между деталями исполнительного органа.
И наконец, следующее преимущество состоит в том, что решение обеспечивает возможность обнаружения в сложных внешних условиях.
Краткое описание графических материалов
Другие характеристики и преимущества изобретения будут ясны из последующего описания примеров выполнения со ссылками на прилагаемые чертежи, имеющих иллюстративный, но не ограничительный характер. На чертежах:
фиг.1 схематично изображает исполнительный орган управления полетом, иллюстрируя принцип его действия,
фиг.2 схематично изображает устройство обнаружения и исполнительный орган управления полетом в соответствии с изобретением,
фиг.3 схематично изображает устройство обнаружения и исполнительный орган управления полетом в соответствии с изобретением в случае повреждения основного тракта,
фиг.4 схематично изображает вариант выполнения устройства обнаружения и исполнительного органа управления полетом в соответствии с изобретением,
фиг.5 схематично изображает вариант выполнения устройства обнаружения и исполнительного органа управления полетом в соответствии с изобретением в случае повреждения основного тракта.
Осуществление изобретения
На фиг.2 показано устройство 13 обнаружения повреждения основного тракта по изобретению, а также исполнительный орган 12 управления полетом по изобретению, оснащенный этим устройством.
Изобретение относится как к устройству обнаружения, так и к исполнительному органу правления полетом, оснащенному этим устройством, и к воздушному судну, содержащему исполнительный орган управления полетом.
Как объяснялось выше, исполнительный орган 12 управления полетом содержит основной тракт 1 и вторичный тракт 10.
Исполнительный орган 12 управления представляет собой, например, цилиндр типа THSA (Trimmable Horizontal Stabilizer Actuator) для управления регулируемой горизонтальной плоскостью воздушного судна (не показана).
Основной и вторичный тракты содержат множество элементов, из которых здесь описываются только некоторые. Конструкция исполнительных органов управления полетом, содержащих основной и вторичный тракты, широко известна специалисту в данной области.
Основной тракт 1 содержит вращающийся полый винт 2, который заканчивается на одном из своих концов соединительной деталью, называемой верхним основным креплением 4, посредством которого он соединен с конструкцией 5 воздушного судна.
Обычно основной тракт 1 содержит также гайку (не показана), которая взаимодействует с винтом 2, установлена на нем и связана с подлежащей управлению плоскостью.
Управление вращением винта 2 осуществляется мотором, что позволяет поступательно перемещать гайку, которая заблокирована от вращения. При этом поступательное перемещение гайки позволяет управлять поворотом, который желают придать регулируемой горизонтальной плоскости.
Аварийная тяга 3 проходит внутри полого винта 2. Аварийная тяга является одним из элементов вторичного тракта 10.
Обычно тяга 3 заканчивается сферической головкой 7, помещенной с зазором внутри охватывающего сферического устройства детали крепления 8 вторичного тракта, называемого верхним вторичным креплением. Само верхнее вторичное крепление 8 соединено с воздушным судном с помощью детали 9 крепления, отличной от той, которая используется для соединения основного тракта 1.
Соединение верхнего вторичного крепления само по себе известно и реализуется системами шпилек и крепежных винтов.
При «нормальном» функционировании усилия воспринимаются основным трактом 1. В случае отказа основного тракта 1, а именно при повреждении одного из конструктивных элементов основного тракта 1, например верхнего основного крепления 4 или винта 2, усилия принимает на себя вторичный тракт 10.
Эта авария должна быть выявлена, чтобы информировать пилота и инициировать операции технического обслуживания на земле, а то и в полете.
Устройство 13 обнаружения повреждения основного тракта предназначено для обнаружения таких повреждений.
Устройство 13 обнаружения повреждения основного тракта содержит датчик 15 положения, соединенный с винтом 2 для измерения информации, представляющей его угловое положение.
В данном примере выполнения датчик 15 является датчиком углового положения. В этом случае информация, представляющая угловое положение винта 2, соответствует самому угловому положению.
Датчик 15 углового положения выполнен с возможностью измерения углового положения винта 2 или его углового перемещения. Здесь может идти речь о перемещении и/или об угловом позиционировании, которые могут быть абсолютными или относительными согласно выбранным условиям. Поскольку датчик 15 и винт 2 связаны друг с другом, датчик 15 измеряет угловое положение винта 2.
Датчик 15 углового положения может быть, например, активным электрическим (индукционным) датчиком измерения вращательных перемещений типа RVDT (от английского - Rotary Variable Differential Transformer - поворотный переменный дифференциальный преобразователь).
Могут использоваться также другие датчики углового положения.
Альтернативно это может быть датчик линейного положения, например, в виде датчика измерения линейных перемещений типа LVDT (от английского - Linear Variable Differential Transformer - линейный переменный дифференциальный преобразователь).
В этом случае датчик 15 линейного положения соединен с винтом 2, например, с помощью механизма типа шарикового винта, который преобразует вращательное движение винта 2 в поступательное движение.
При этом датчик 15 линейного положения измеряет линейное положение или линейное перемещение, которые представляют угловое положение винта 2.
Может использоваться любой датчик 15, способный измерять информацию, представляющую угловое положение винта 2, то есть измеряемая информация (например, положение) соотносится с угловым положением винта 2 и за счет этого позволяет выводить его угловое положение.
Согласно изобретению устройство 13 обнаружения повреждения основного тракта содержит систему 17 отсоединения, способную отсоединять винт 2 от датчика 15 положения в случае перемещения тяги 3 относительно винта 2 во время повреждения основного тракта 1.
Это отсоединение вызывает прерывание соединения датчика 15 и винта 2.
Система 17 отсоединения калибрована таким образом, чтобы отсоединять связь между винтом 2 и датчиком 15 исключительно в случае повреждения основного тракта 1.
В случае повреждения одного из элементов основного тракта 1 вторичный тракт 10 принимает усилие на себя.
В частности, в этом случае тяга 3 подвергается перемещению относительно винта 2, причем основная составляющая перемещения ориентирована параллельно винту 2 при поступательном перемещении в одном или другом направлении. Это перемещение тяги 3 относительно винта 2 детектируется системой 17 отсоединения, которая вызывает прерывание связи между винтом 2 и датчиком 15 положения. Это прерывание инициируется в тот момент, когда перемещение тяги 3 относительно винта 2 превышает предварительно определенную пороговую величину, соответствующую повреждению основного тракта 1, причем пороговая величина известна из моделирования или путем измерения при проведении опытов на месте. Целью является устранение ложного детектирования вследствие относительных перемещений винта 2 и тяги 3, которые не являются результатом повреждения основного тракта 1.
В пределах определенной пороговой величины система 17 отсоединения не прерывает связь между винтом 2 и датчиком 15 положения, что устраняет ложное детектирование.
В некоторых примерах осуществления система 17 отсоединения содержит датчик или комплект датчиков, измеряющих перемещение тяги 3 относительно винта 2 (или наоборот), что позволяет отсоединять винт 2 от датчика 15 положения в случае повреждения основного тракта 1.
В других примерах осуществления система 17 выполнена таким образом, чтобы отсоединять датчик 15 положения от винта 2, когда тяга 3 передает предварительно определенную нагрузку на винт 2, соответствующую механическому усилию, оказываемую тягой 3 на винт 2 при повреждении основного тракта 1.
В этом случае перемещение винта 2 относительно тяги 3 в случае повреждения основного тракта 1 обнаруживается косвенным образом, через нагрузку, оказываемую тягой 3 на винт 2.
Действительно, в случае повреждения основного тракта тяга 3 перемещается относительно винта 2 и при этом передает на винт 2 механическое напряжение выше предварительно определенной пороговой величины. Это механическое напряжение используется системой 17 отсоединения для отсоединения винта 2 от датчика 15 положения в случае повреждения основного тракта 1.
Кроме того, устройство 13 содержит вычислительный блок 18, выполненный с возможностью сравнения информации, представляющей угловое положение винта 2, измеряемой датчиком 15 положения, и информации, представляющей угловое положение винта 2, измеряемой вторым датчиком 19 положения устройства 13 обнаружения. Измеряемая вторым датчиком 19 положения информация, представляющая угловое положение винта 2, может соответствовать самому угловому положению.
Второй датчик 19 положения отличается от датчика 15 положения тем, что он не связан с винтом 2 системой 17 отсоединения. Таким образом, второй датчик 19 положения является независимым от системы 17 отсоединения. За исключением этого отличия он является датчиком того же типа, способным измерять информацию, представляющую угловое положение винта 2. Этот датчик может быть датчиком углового положения линейного или другого типа, как это было описано выше применительно к датчику 15.
Здесь может идти речь, например, о датчике углового положения самого воздушного судна, который используется для управления и обеспечения вращения винта 2 при «нормальном» функционировании.
Выгодным образом это может быть, в частности, датчик углового положения, связанный с винтом 2 и существующий во всех исполнительных органах управления полетом, что устраняет необходимость в установке новых датчиков. Этот тип датчика используется для управления и обеспечения вращения винта 2 основного тракта 1.
Выгодным образом датчик 15 положения и второй датчик 19 положения интегрированы в одном и том же многоходовом датчике.
Таким образом, изобретение позволяет использовать уже имеющиеся в воздушном судне датчики путем включения в исполнительный орган управления устройства 13 обнаружения с системой 17 отсоединения.
Вычислительный блок 18 может быть вычислительным устройством, предназначенным для управления исполнительным органом 12 управления, или предпочтительно составлять часть этого вычислительного устройства.
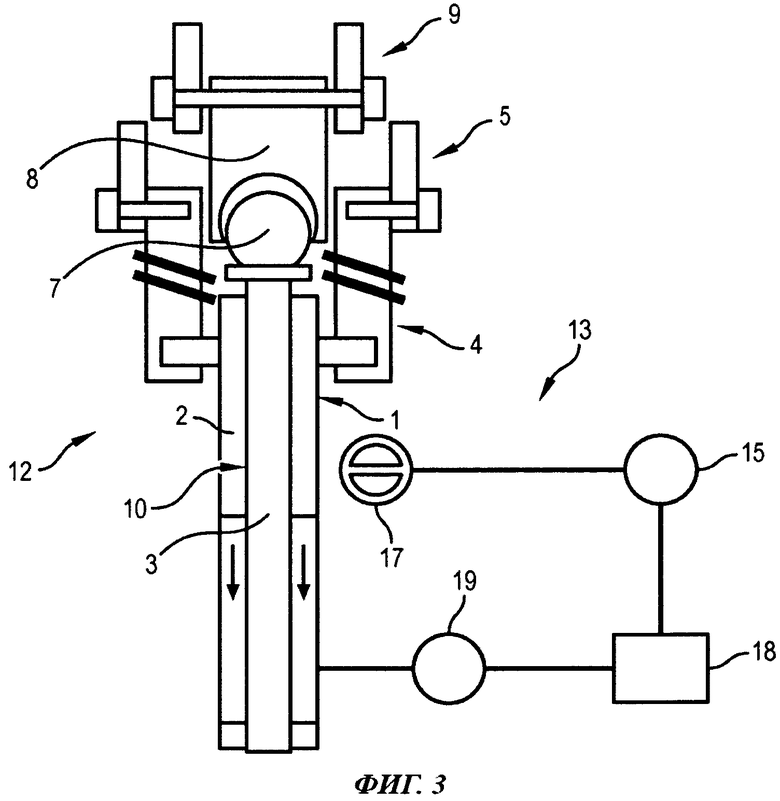
На фиг.3 показано повреждение основного тракта 1 и принятие на себя усилия вторичным трактом 10.
Повреждение показано на уровне верхнего основного крепления 4, однако оно может происходить в любом элементе, участвующем в основном тракте исполнительного органа управления.
Перед этим повреждением, то есть при «нормальном» функционировании, датчик 15 связан с винтом 2 и измеряет информацию, представляющую угловое положение винта 2.
При этом вращение винта 2 управляется пилотом через средства управления полетом с передачей на воздушное судно. Информация, представляющая угловое положение винта 2, измеряется вторым датчиком 19 положения, который продолжает измерять информацию, представляющую угловое положение винта 2, даже в случае повреждения основного тракта 1, поскольку этот датчик не связан с винтом 2 системой 17 отсоединения.
В случае повреждения основного тракта 1 усилие принимает на себя вторичный тракт 10. В этом случае тяга 3 подвергается перемещению относительно винта 2, причем это перемещение превышает предварительно определенную пороговую величину, характерную для повреждения основного тракта 1.
При перемещении за пределы пороговой величины система 17 отсоединения вызывает прерывание связи между винтом 2 и датчиком 15 положения.
Вследствие этого датчик 15 больше не измеряет информацию, представляющую угловое положение винта 2.
При этом датчик 15 положения теперь измеряет нулевой или постоянный сигнал, что позволяет обнаруживать повреждение основного тракта 1 и его аварию.
Выгодным образом авария обнаруживается путем сравнения информации, представляющей угловое положение, измеряемой датчиком 15 положения, и информации, представляющей угловое положение винта 2, измеряемой вторым датчиком 19 положения.
Действительно, в случае повреждения основного тракта 1 второй датчик 19 продолжает измерять информацию, представляющую угловое положение винта 2 и изменения его позиционирования.
Если вычислительный блок 18 сравнивает этот сигнал с сигналом, измеряемым датчиком 15 положения, который отсоединен от винта 2 системой 17 отсоединения, становится ясно, что сигналы различны, в то время как перед аварией они были равны или, по меньшей мере, сопоставимы.
Выгодным образом вычислительный блок 18 выполнен с возможностью обнаруживать аварию, когда сравнение информации, измеряемой датчиком 15 положения, и информации, измеряемой вторым датчиком 19 положения, показывает величину выше или ниже предварительно определенной пороговой величины.
Решение по изобретению отличается от решений уровня техники, поскольку оно обнаруживает аварию непосредственно на уровне винта 2 и аварийной тяги 3, а не на уровне верхнего крепления 8 вторичного тракта или верхнего крепления 4 основного тракта.
Учитывая, что в решении по изобретению не требуется установки датчиков между деталями исполнительного органа управления, зазор между деталями («флаттер») может быть снижен, что весьма благоприятно.
Действительно, как это хорошо известно специалисту в данной области, условия по «флаттеру» чрезвычайно строги.
Кроме того, предложенное решение является простым и недорогим. Это обусловлено тем, что требуется немного дополнительных датчиков.
Можно также констатировать значительное снижение массы воздушного судна, порядка 7 кг, по сравнению с некоторыми решениями уровня техники, в которых требовалась прокладка защищенных кабелей, связывающих датчики на уровне верхнего вторичного крепления с вычислительным устройством воздушного судна.
Кроме того, учитывая простоту требуемых аппаратных средств, решение по изобретению способно обнаруживать аварии даже в сложных наружных условиях (низких температур и др.).
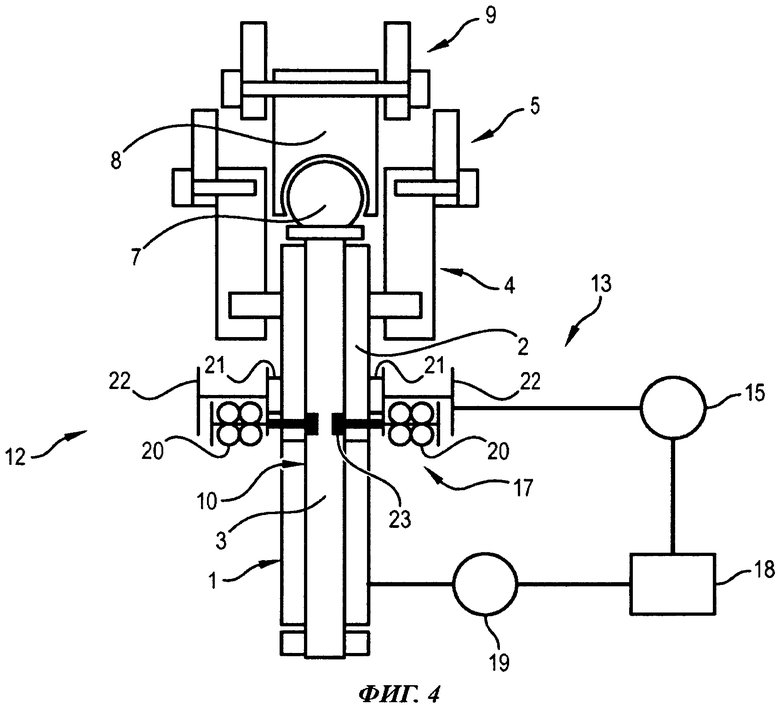
На фиг.4 показан частный пример выполнения устройства 13 и исполнительного органа 12 управления полетом по изобретению.
В этом примере выполнения система 17 отсоединения содержит срезной палец 23. Срезной палец 23 имеет калиброванное сечение для среза при предварительно определенной нагрузке, которая соответствует механическому усилию, оказываемому винтом 2 на тягу 3 при повреждении основного тракта 1 (поломки винта 2 или другого элемента основного тракта 1).
Здесь согласно изобретению система 17 отсоединения отсоединяет винт 2 от датчика 15 в случае движения тяги 3 относительно винта 2 при повреждении основного тракта 1. Как было указано выше, это движение вызывает механическое усилие, оказываемое тягой 3 на винт 2, что позволяет получать информацию о движении тяги 3 относительно винта 2.
Для того чтобы устранить ложные показания обнаружения, палец 23 калиброван таким образом, чтобы не срезаться при нагрузке меньше нагрузки, оказываемой тягой 3 на винт 2 при повреждении основного тракта 1. Пороговая величина этой нагрузки известна в результате моделирования и/или измерений на месте.
Палец 23 может быть вставлен в проточку, пересекающую винт 2 и тягу 3, или быть завинчен в резьбовое гнездо.
Кроме того, ось срезного пальца 23 подвергается предварительно определенной нагрузке удаления, что позволяет удалять палец 23 из винта 2 в случае разрушения пальца 23. Эта нагрузка удаления обеспечивается пружинами 20, расположенными перпендикулярно винту 2.
Палец 23 соединяет винт 2 с шестерней 22, которая посредством зубчатого зацепления приводит датчик 15 положения, например датчик углового положения, приводимый во вращение.
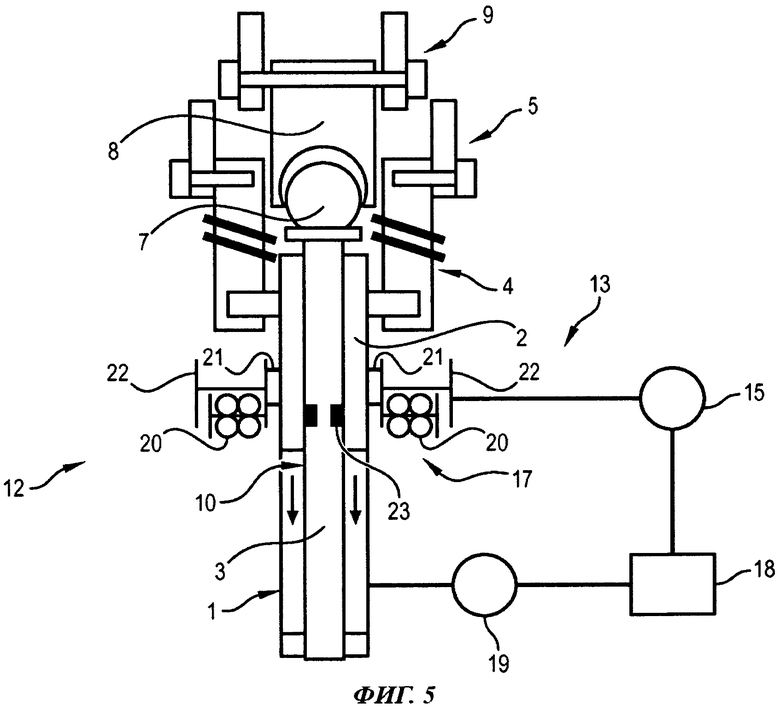
Как показано на фиг.5, в случае повреждения основного тракта 1 тяга 3 оказывает механическое усилие выше пороговой величины среза пальца 23, что вызывает разрушение пальца 23. Вследствие воздействия пружины на палец 23 он отсоединяется от винта 2. При этом шестерня 22 становится свободной в своем вращении благодаря опоре 21 качения.
Таким образом, теперь шестерня 22 отсоединена от винта 2. Это означает, что датчик 15 больше не измеряет информации, представляющей угловое положение винта 2, и отсоединен от винта 2, что позволяет обнаруживать повреждение основного тракта 1.
Когда вычислительный блок 18 сравнивает сигнал, измеряемый датчиком 15 положения, с сигналом, измеряемым вторым датчиком 19 положения, он определяет аварию, если результат сравнения выше (или ниже в определенном случае) предварительно определенной пороговой величины.
Возможны другие примеры выполнения системы 17 отсоединения.
Изобретение может использоваться в любом исполнительном органе управления полетом, в котором имеется основной тракт и вторичный тракт, способный принять на себя усилие в случае повреждения основного тракта, как это было описано выше.
Изобретение дает множество преимуществ в отношении стоимости, простоты, надежности и компоновки.

Изобретение относится к области авиации, в частности к конструкциям рулевых приводов летательных аппаратов. Устройство (13) для обнаружения повреждения основного тракта в исполнительном органе управления полетом содержит датчик (15) положения, соединенный с винтом (2) для измерения информации, представляющей его угловое положение, и систему (17) отсоединения, выполненную с возможностью отсоединять датчик (15) положения от винта (2) в случае перемещения тяги (3) относительно винта (2) при повреждении основного тракта (1). Основной тракт (1) имеет полый вращающийся винт (2), вторичный тракт (10), имеющий воспринимающую усилие аварийную тягу (3), проходящую через винт. Исполнительный орган (12) для управления полетом содержит основной тракт (1), вторичный тракт (10), имеющий воспринимающую усилие аварийную тягу (3), проходящую через винт (2), и устройство (13) для обнаружения повреждения основного тракта. Вторичный тракт (10) выполнен с возможностью принятия на себя усилия, оказываемого основным трактом (1), в случае его повреждения. Достигается повышение надежности, снижение зазоров между деталями исполнительного органа. 2 н. и 7 з.п. ф-лы, 5 ил.
1. Устройство (13) для обнаружения повреждения основного тракта в исполнительном органе управления полетом, причем исполнительный орган содержит основной тракт (1), имеющий полый вращающийся винт (2), вторичный тракт (10), имеющий воспринимающую усилие аварийную тягу (3), проходящую через винт (2), отличающееся тем, что содержит датчик (15) положения, соединенный с винтом (2) для измерения информации, представляющей его угловое положение, и систему (17) отсоединения, выполненную с возможностью отсоединять датчик (15) положения от винта (2) в случае перемещения тяги (3) относительно винта (2) при повреждении основного тракта (1).
2. Устройство по п.1, отличающееся тем, что содержит вычислительный блок (18), выполненный с возможностью сравнения информации, измеряемой датчиком (15) положения, и информации, представляющей угловое положение винта (2), измеряемой вторым датчиком (19) положения, независимым от системы (17) отсоединения.
3. Устройство по п.2, отличающееся тем, что вычислительный блок (18) выполнен с возможностью обнаружения повреждения основного тракта (1), когда результат сравнения выше или ниже предварительно определенной пороговой величины.
4. Устройство по любому из пп.1-3, отличающееся тем, что система (17) отсоединения выполнена с возможностью отсоединять датчик (15) положения от винта (2), когда тяга (3) оказывает предварительно определенную нагрузку на винт (2), соответствующую механическому усилию, оказываемому тягой (3) на винт (2) при повреждении винта (2) или другого элемента основного тракта (1).
5. Устройство по п.1, отличающееся тем, что система (17) отсоединения содержит срезной палец (23).
6. Устройство по п.5, отличающееся тем, что срезной палец имеет калиброванное сечение для разрушения при предварительно определенной нагрузке, которая соответствует механическому усилию, оказываемому тягой (3) на винт (2) при повреждении основного тракта (1).
7. Устройство по п.5 или 6, отличающееся тем, что срезной палец (23) подвержен предварительно определенной нагрузке удаления, которая позволяет удалять палец (23) из винта (2) в случае разрушения пальца (23).
8. Устройство по п.1, отличающееся тем, что датчик (15) положения является датчиком (15) углового положения.
9. Исполнительный орган (12) для управления полетом, содержащий основной тракт (1), имеющий полый вращающийся винт (2), вторичный тракт (10), имеющий воспринимающую усилие аварийную тягу (3), проходящую через винт (2), причем вторичный тракт (10) выполнен с возможностью принятия на себя усилия, оказываемого основным трактом (1), в случае повреждения основного тракта (1), отличающийся тем, что содержит устройство (13) для обнаружения повреждения основного тракта, охарактеризованное в любом из пп.1-8.
| DE 102007023394 A1, 20.11.2008 | |||
| EP 1785346 A2, 16.05.2007 | |||
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 2008 |
|
RU2370412C1 |
| WO 2008112363 A2, 18.09.2008 | |||

